JP2019167155A - ラベル貼付装置、ラベル貼付方法 - Google Patents
ラベル貼付装置、ラベル貼付方法 Download PDFInfo
- Publication number
- JP2019167155A JP2019167155A JP2018058574A JP2018058574A JP2019167155A JP 2019167155 A JP2019167155 A JP 2019167155A JP 2018058574 A JP2018058574 A JP 2018058574A JP 2018058574 A JP2018058574 A JP 2018058574A JP 2019167155 A JP2019167155 A JP 2019167155A
- Authority
- JP
- Japan
- Prior art keywords
- label
- adherend
- unit
- sticking
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Abstract
Description
しかし、従来のラベル貼付装置では、電子タグを内蔵させたラベルをユーザが認識できる位置に効率的に貼付することができなかったため、流通の中間段階で人がラベルを1枚ずつ商品に貼付するという煩雑な作業が行われていた。
前記ラベル貼付装置は、
前記被着体の画像を取得する画像取得部と、
前記画像取得部が取得した画像に基づいて、前記ラベルの一部が前記被着体の輪郭から外側に突出するようにして前記ラベルの粘着面を前記被着体に当接させることで、前記ラベルを前記被着体に貼付するラベル貼付部と、
を備えたラベル貼付装置である。
(1−1)ラベル貼付装置100
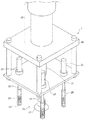
本実施形態のラベル貼付装置100について、図1を参照して説明する。図1は、本発明の実施形態に係るラベル貼付装置100を説明する斜視図である。
図1に示すように、ラベル貼付装置100は、連続して搬送される被着体Aの特定の貼付領域にラベルLBを貼付する装置である。ラベル貼付装置100は、ラベル貼付機構1(ラベル貼付部の一例)と、貼付用搬送部101と、投入用搬送部102と、上流側撮像部103と、下流側撮像部104と、プリンタユニット110と、を有する。
ラベル貼付機構1は、貼付用搬送部101の載置面に載置された被着体Aの特定の領域にラベルLBを貼付する装置である。なお、ラベル貼付装置100は、ラベル貼付機構1を横方向に移動させる(つまり、貼付用搬送部101の被着体Aの載置面に平行な面上で移動させる)横方向アクチュエータを備える。
ラベル貼付機構1の構成については、後で詳細に説明する。
上流側撮像部103は、画像取得部の一例である。
次に、ラベルLBについて図2を参照して説明する。図2は、ラベル貼付装置100によって貼付されるラベルLBのおもて面および裏面の構成を示す図である。
電子タグ81には、被着体Aに関する情報が記録されている。被着体Aに関する情報とは、例えば、被着体Aの製品コード、シリアル番号、ロット番号、消費期限(あるいは賞味期限)などの情報である。
ラベルLBの裏面は、全面に亘って非粘着面で構成されている。なお、ラベルLBのおもて面は、ラベルLBが被着体Aに貼付されたときに被着体Aのおもて側から視認できる面である。
また、ラベルLBの裏面には、ラベルLBに電子タグが内蔵されていることを注意喚起するための文字列印字部83が設けられている。図3の文字列印字部83に含まれる文字列は一例に過ぎず、文字列を見た人に注意喚起する文字列であれば如何なる文字列でもよい。例えば、被着体Aの内容物が食品である場合には、「電子レンジであたためるときはこのラベルを外してください。」といった文字列であってもよい。
なお、図2に示したラベルLBのおもて面には一部のみに粘着部が設けられている例を示したが、その限りではない。ラベルLBのおもて面の全面に粘着部が設けられていてもよい。
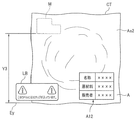
次に、ラベル貼付装置100による被着体Aに対するラベルLBの貼付態様について、図3を参照して説明する。図3は、ラベルLBが貼付された被着体Aのおもて側と裏側を例示する図である。
図3に例示される被着体Aは、食品が外装材に含まれた状態の商品である。被着体Aのおもて面As1(第1面の一例)には、商品の内容が識別可能な表示部A11が設けられている。被着体Aの裏面As2(第2面の一例)には、商品の補助的な情報(例えば、名称、原材料、販売者等の情報)についての表示部A12が設けられている。
また、商品(被着体A)が店舗に陳列された場合には、商品のおもて側が消費者の方に向くように配置される。この状態では、商品の裏面に貼付されたラベルLBの一部(記号印字部82が設けられている部分)が商品の輪郭から外側に突出している。そのため、おもて面の商品の内容についての表示部A11はラベルLBによって遮られることなく消費者に視認され、かつラベルLBにICチップが含まれていることを消費者に認識させることができる。
次に、図1に示したラベル貼付装置100のラベル貼付機構1について、図4〜7を参照してさらに説明する。
図4は、本発明の実施形態に係るラベル貼付機構1を説明するための斜視図である。図5は、本発明の実施形態に係るラベル貼付機構1の要部を拡大して示す斜視図である。図6は、本発明の実施形態に係るラベル貼付機構1の側面図である。図7a〜7cは、それぞれ、ラベル貼付機構1がラベルLBを保持した状態で、被着体Aに向けて下降する様子を示した側面図である。
図7aは、ラベル貼付機構1がラベルLBを保持した状態で、被着体Aに向けて下降する様子を示している。図7bは、ラベル貼付機構1がラベルLBを被着体Aに貼付する直前の様子を示している。図7cは、ラベル貼付機構1が被着体AにラベルLBを貼付したときの様子を示している。図7a〜7cには、ラベルLBの貼付位置ALが設定されている被着体Aの縁部分Eの様子が示されている。
保持部マウント11には、保持部ロッド12を載置面Swの法線方向(以下、押さえ方向という。)に動かす機構(図示しない)が備えられている。吸着部13は、可撓性材料で形成されている。可撓性材料としては、ゴム又は合成樹脂が好ましい。吸着部13の吸着力は、ラベルLBの粘着力よりも弱く設定されている。吸着部13のラベルLBと接触する端部の位置P1(図6参照)が含まれる平面を保持面という。
具体的には、図6に示されるように、駆動部30は、保持部10における吸着部13の端部(保持面)の位置P1を、押さえ部20の先端部分23の底面の位置P2(基準面に相当する)よりも載置面Swの法線方向において載置面Sw側に前進した位置にセットする。
ラベルLBを搬送ベルトCから取り上げる際には、保持面は、この位置にセットされる。
また、駆動部30は、保持部10における吸着部13の端部の位置P1を、押さえ部20の先端部分23の底面の位置P2よりも、ブラケット40側に後退した位置にセットする。ラベルLBを保持した状態では、保持面は、この位置にセットされる。
次に、図1に示したラベル貼付装置100の電気的構成について、図8を参照して説明する。図8は、本実施形態に係るラベル貼付装置100の電気的構成を示すブロック図である。
図8に示すように、本実施形態のラベル貼付装置100は、上流側撮像部103、下流側撮像部104、プリンタユニット110、制御部115、ストレージ116、コンベア駆動部117、および、ラベル貼付駆動部118を備える。
ラベル貼付駆動部118は、制御部115から受信する制御信号に基づいて、ラベル貼付装置100の横方向アクチュエータと、ラベル貼付機構1の駆動部30の縦方向アクチュエータおよび回動方向アクチュエータを駆動する。これにより、保持部10を自在に駆動することができるとともに、保持部10に保持されたラベルLBの位置および向きを自在に変更できる。
ストレージ116は、不揮発性のメモリであり、例えばフラッシュメモリ等のSSD(Solid State Drive)やハードディスク装置である。
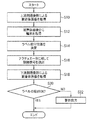
次に、ラベル貼付装置100による貼付処理について、図9および図10を参照して説明する。
図9は、本実施形態のラベル貼付装置100の制御部115によって実行されるフローチャートである。図10は、本実施形態のラベル貼付位置の決定方法を説明する図である。
制御部115は、被着体Aの輪郭を認識する画像認識部の一例である。
制御部115は、被着体画像から取得した輪郭CTに基づいて、異なる方向に延びる2本の輪郭線Ex,Eyを決定する。このとき、輪郭CTが直線でなくても概略の輪郭線を決定すればよい。次いで、制御部115は、決定した2本輪郭線Ex,Eyをそれぞれ被着体画像の内側に所定量X1,Y1だけ平行移動させた2本の仮想線の交点P0を、ラベルLBを貼付するときの基準位置とする。そして、基準位置P0がラベルLBの頂点と一致するようにして、輪郭線Eyと概ね平行となるように貼付するようにラベル貼付位置を決定する。この場合、ラベルLBの長手方向の長さをLとすると、L>X1となるように予めX1の値が設定される。
以下、本発明のラベル貼付装置およびラベル貼付方法の第2の実施形態について、図11および図12を参照して説明する。なお、以下、第1の実施形態と相違する部分についてのみ説明し、第1の実施形態と同一の構成については同一符号を付して重複説明を省略する。
図11は、第2の実施形態に係るラベル貼付装置100Aを説明する斜視図である。図12は、本発明の第2の実施形態に係るラベル貼付位置の決定方法を説明する図である。
本実施形態のラベル貼付装置100Aにおいて、上流側撮像部103により被着体Aの被着体画像が取得される。次いで、金属検出部105は、当該被着体Aに含まれている金属部材Mの概略位置を特定する。本実施形態の制御部115は、取得した被着体画像の輪郭と被着体Aにおける金属部材Mの概略位置とに基づいて、ラベル貼付位置を決定する。
図12に示す例では、ラベル貼付位置は、輪郭CTの輪郭線Eyを基準として距離Y3だけ離間した位置である場合を示している。この場合、制御部115は、距離Y3と輪郭CTに基づき、金属部材Mから所定量離間した位置をラベル貼付位置として決定する。
以下、本発明のラベル貼付装置およびラベル貼付方法の第3の実施形態について、図13を参照して説明する。なお、以下、第1の実施形態と相違する部分についてのみ説明する。
図13は、本発明の第3の実施形態に係るラベル貼付装置100Bを説明する斜視図である。
決定されたラベル貼付面においてラベル貼付位置は、第1の実施形態と同様に、ラベルの一部が被着体Aの輪郭から外側に突出するように決定される。
次に、第4の実施形態について説明する。
第4の実施形態のラベル貼付方法は、図10を参照して説明したラベル貼付位置の決定方法とは異なる方法でラベルLBを被着体Aに貼付する。以下、図14および図15を参照して、本実施形態のラベル貼付方法について説明する。
第1の実施形態において例示した被着体Aの被着体画像の輪郭CTは概ね矩形の形態であるが、図14および図15はそれぞれ、被着体画像の輪郭CTが矩形ではない場合を例示している。図14は、被着体Aがおにぎりである場合の被着体画像の輪郭CTを示している。図15は、被着体Aが、チューブ形の外装材に内容物として例えば洗剤や調味料などが含まれるものである場合の被着体画像の輪郭CTを示している。
なお、被着体Aが店舗に陳列されるときの底部bmを基準にラベル貼付位置を決定することは、ラベルLBの視認性の観点で好ましくない場合があるため、制御部は、被着体画像から底部bmを特定し、輪郭CTのうち底部bmをラベル貼付位置の基準位置から除外してもよい。その際、輪郭CTにおける底部bmの位置は、例えば、被着体画像の内容物を特定する表示部等に基づいて特定される。
例えば、電子タグのデータを確実に読み取ることができるようにするために、被着体Aに付着した水分から所定量離間した位置をラベル貼付位置として決定してもよい。
10…保持部
11…保持部マウント
12…保持部ロッド
13…吸着部
20…押さえ部
21…押さえ部マウント
22…押さえ部ロッド
23…先端部分
24…コイルバネ
30,30A…駆動部
40…ブラケット
81…電子タグ
82…記号印字部
83…文字列印字部
84…粘着部
85…非粘着部
100,100A,100B…ラベル貼付装置
101…貼付用搬送部
102…投入用搬送部
103…上流側撮像部
104…下流側撮像部
105…金属検出部
107…スライド部
110…プリンタユニット
111…プリンタ本体
112…ラベルロール
113…搬送ベルト
114…台紙ロール
115…制御部
116…ストレージ
117…コンベア駆動部
118…ラベル貼付駆動部
A…被着体
A11,A12…表示部
AL…貼付位置
As1…おもて面
As2…裏面
C…搬送ベルト
W…載置台
Sw…載置面
CT…輪郭
E…縁部分
LB…ラベル
Sw…載置面
bm…底部
Claims (7)
- 電子タグを含むラベルを被着体に貼付するラベル貼付装置であって、前記ラベルの一方の面には粘着面を有し、
前記ラベル貼付装置は、
前記被着体の画像を取得する画像取得部と、
前記画像取得部が取得した画像に基づいて、前記ラベルの一部が前記被着体の輪郭から外側に突出するようにして前記ラベルの粘着面を前記被着体に当接させることで、前記ラベルを前記被着体に貼付するラベル貼付部と、
を備えたラベル貼付装置。 - 前記画像取得部が取得した画像に基づいて前記被着体の輪郭を認識する画像認識部を備え、
前記ラベル貼付部は、前記画像認識部によって認識された前記被着体の輪郭を基準として、前記ラベルの粘着面の前記被着体に対する当接位置を決定する、
請求項1に記載されたラベル貼付装置。 - 前記被着体は、前記被着体の内容が識別可能な表示がされている第1面と、当該第1面とは反対側の第2面と、を有し、
前記ラベル貼付部は、前記ラベルを前記被着体の第2面に貼付する、
請求項1または2に記載されたラベル貼付装置。 - 前記ラベルは、マーク若しくは文字、またはマークと文字の組み合わせからなる表示がなされている表示部を有し、
前記ラベル貼付部は、前記被着体の前記第1面と対向して前記被着体を見たときに、前記ラベルの前記表示部が前記ラベルの輪郭から突出し、かつ前記表示部が視認可能となるように、前記ラベルを前記被着体の第2面に貼付する、
請求項3に記載されたラベル貼付装置。 - 前記被着体に含まれる金属部材の位置を検出する金属検出部を備え、
前記ラベル貼付部は、前記金属検出部によって検出された金属部材の位置から離間した前記ラベルの位置に、前記被着体を貼付する、
請求項1から4のいずれか1項に記載されたラベル貼付装置。 - 前記ラベルの粘着面は、前記一方の面の一部のみに設けられている、
請求項1から5のいずれか1項に記載されたラベル貼付装置。 - 電子タグを含むラベルを被着体に貼付するラベル貼付方法であって、前記ラベルの一方の面には粘着面を有し、
前記ラベル貼付方法は、
前記被着体の画像を取得し、
前記取得した画像に基づいて、前記ラベルの一部が前記被着体の輪郭から外側に突出するようにして前記ラベルの粘着面を前記被着体に当接させることで、前記ラベルを前記被着体に貼付する、
ラベル貼付方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018058574A JP7037977B2 (ja) | 2018-03-26 | 2018-03-26 | ラベル貼付装置、ラベル貼付方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018058574A JP7037977B2 (ja) | 2018-03-26 | 2018-03-26 | ラベル貼付装置、ラベル貼付方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019167155A true JP2019167155A (ja) | 2019-10-03 |
| JP7037977B2 JP7037977B2 (ja) | 2022-03-17 |
Family
ID=68107972
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018058574A Active JP7037977B2 (ja) | 2018-03-26 | 2018-03-26 | ラベル貼付装置、ラベル貼付方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7037977B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021232621A1 (zh) * | 2020-05-21 | 2021-11-25 | 苏州艾隆科技股份有限公司 | 一种多维度具有视觉核对定位功能的贴签机 |
| JP2023026406A (ja) * | 2021-08-13 | 2023-02-24 | 株式会社Mujin | 多目的ラベリングシステム及び方法を備えたロボットシステム |
| WO2023053866A1 (ja) * | 2021-09-29 | 2023-04-06 | サトーホールディングス株式会社 | ラベル貼付装置、ラベル貼付方法及びプログラム |
| US11672102B2 (en) | 2021-03-23 | 2023-06-06 | Kioxia Corporation | Memory system and label component |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002249120A (ja) * | 2001-02-20 | 2002-09-03 | Fuji Photo Film Co Ltd | ラベル貼付け装置及びラベル貼付け方法 |
| JP2007118955A (ja) * | 2005-10-25 | 2007-05-17 | Sato Corp | ラベル貼付装置 |
| JP2011076136A (ja) * | 2009-09-29 | 2011-04-14 | Brother Industries Ltd | 発光タグ |
| JP2015001484A (ja) * | 2013-06-17 | 2015-01-05 | 富久 内藤 | 識別ラベル、検体検査方法 |
| JP2017047947A (ja) * | 2015-09-02 | 2017-03-09 | 株式会社イシダ | ラベル発行装置 |
| WO2017149900A1 (ja) * | 2016-03-03 | 2017-09-08 | サトーホールディングス株式会社 | ラベル貼付機構、ラベル貼付装置及びラベル貼付方法 |
-
2018
- 2018-03-26 JP JP2018058574A patent/JP7037977B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002249120A (ja) * | 2001-02-20 | 2002-09-03 | Fuji Photo Film Co Ltd | ラベル貼付け装置及びラベル貼付け方法 |
| JP2007118955A (ja) * | 2005-10-25 | 2007-05-17 | Sato Corp | ラベル貼付装置 |
| JP2011076136A (ja) * | 2009-09-29 | 2011-04-14 | Brother Industries Ltd | 発光タグ |
| JP2015001484A (ja) * | 2013-06-17 | 2015-01-05 | 富久 内藤 | 識別ラベル、検体検査方法 |
| JP2017047947A (ja) * | 2015-09-02 | 2017-03-09 | 株式会社イシダ | ラベル発行装置 |
| WO2017149900A1 (ja) * | 2016-03-03 | 2017-09-08 | サトーホールディングス株式会社 | ラベル貼付機構、ラベル貼付装置及びラベル貼付方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021232621A1 (zh) * | 2020-05-21 | 2021-11-25 | 苏州艾隆科技股份有限公司 | 一种多维度具有视觉核对定位功能的贴签机 |
| US11672102B2 (en) | 2021-03-23 | 2023-06-06 | Kioxia Corporation | Memory system and label component |
| JP2023026406A (ja) * | 2021-08-13 | 2023-02-24 | 株式会社Mujin | 多目的ラベリングシステム及び方法を備えたロボットシステム |
| JP7302802B2 (ja) | 2021-08-13 | 2023-07-04 | 株式会社Mujin | 多目的ラベリングシステム及び方法を備えたロボットシステム |
| WO2023053866A1 (ja) * | 2021-09-29 | 2023-04-06 | サトーホールディングス株式会社 | ラベル貼付装置、ラベル貼付方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7037977B2 (ja) | 2022-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019167155A (ja) | ラベル貼付装置、ラベル貼付方法 | |
| JP4885686B2 (ja) | ラベル貼付装置 | |
| US6550512B2 (en) | Labeling machine capable of preventing erroneous attachment of labels on containers | |
| US6575216B2 (en) | Labeling machine capable of detection of defective products and removal of the defective products at a take-out end of a conveying unit thereof | |
| US20060125640A1 (en) | Merchandise marking with programmable transponders | |
| JP7194039B2 (ja) | 電子タグの貼付装置 | |
| JP2020064587A5 (ja) | ||
| JP4933877B2 (ja) | ラベル貼付装置 | |
| JP2019016330A (ja) | Rfidタグラベルおよびrfidタグラベル連続体 | |
| JP4865247B2 (ja) | ラベル貼着方法およびラベル貼着装置 | |
| JP4812020B2 (ja) | ラベル貼付装置 | |
| JP4776013B2 (ja) | Rfidラベル貼付装置 | |
| JP4799108B2 (ja) | ラベル貼付装置 | |
| JP4799281B2 (ja) | ラベル貼付システム | |
| CN111989694A (zh) | 电子标签写入系统及其方法 | |
| JP2019189245A (ja) | 電子タグの貼付装置及びその方法 | |
| JP2008299603A (ja) | 手荷物用rfidタグ | |
| JP2007065088A (ja) | Rfidタグおよびrfidラベル | |
| JP6484379B1 (ja) | 電子タグの貼付装置及びその方法 | |
| JP2007137499A (ja) | ラベル貼付装置 | |
| JP2007118955A (ja) | ラベル貼付装置 | |
| JP2008114901A (ja) | ラベル貼付装置 | |
| JP4537773B2 (ja) | ラベル貼付システム | |
| JP4834320B2 (ja) | 無線タグパッケージ | |
| JP4815112B2 (ja) | ラベル貼付装置およびその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20200114 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220301 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220307 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7037977 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |