JP2017534520A - インテリジェントな車両のポジショニングによる衝撃緩和 - Google Patents
インテリジェントな車両のポジショニングによる衝撃緩和 Download PDFInfo
- Publication number
- JP2017534520A JP2017534520A JP2017523209A JP2017523209A JP2017534520A JP 2017534520 A JP2017534520 A JP 2017534520A JP 2017523209 A JP2017523209 A JP 2017523209A JP 2017523209 A JP2017523209 A JP 2017523209A JP 2017534520 A JP2017534520 A JP 2017534520A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- collision
- host vehicle
- host
- obstructing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000000116 mitigating effect Effects 0.000 title claims abstract description 45
- 238000000034 method Methods 0.000 claims abstract description 20
- 230000008859 change Effects 0.000 claims description 10
- 230000002452 interceptive effect Effects 0.000 claims description 6
- 230000002265 prevention Effects 0.000 claims description 5
- 230000006870 function Effects 0.000 claims description 2
- 230000004044 response Effects 0.000 claims description 2
- 230000001960 triggered effect Effects 0.000 claims description 2
- 238000005192 partition Methods 0.000 claims 1
- 230000000694 effects Effects 0.000 abstract description 2
- 238000001514 detection method Methods 0.000 description 2
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/085—Taking automatic action to adjust vehicle attitude in preparation for collision, e.g. braking for nose dropping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B60W2420/408—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/81—Braking systems
Abstract
Description
本発明は、ホスト車両と、ホスト車両の経路に侵入している車両のサイドドア区画との直接的な衝撃衝突を低減する方法およびシステムに関する。
ある実施例では、本発明は、車両衝突を緩和する方法を提供する。この方法は、ホスト車両の経路に侵入している妨害車両の位置、速度および運動方向をセンシングすることと、ホスト車両と妨害車両との衝突が差し迫っており、回避できないものであるか否かを特定することと、ホスト車両と妨害車両との衝突が差し迫っており、回避できないものである場合に、妨害車両との衝突を緩和するためにホスト車両の経路を変更することとを含んでいる。
本発明の実施例を詳細に説明する前に、本発明は応用において、以降の説明に記載されている、または、以降の図面に示されている構造の細部およびコンポーネントの配置に制限されない、ということを述べておく。本発明は、他の実施例が可能であり、かつ、種々の様式で実施または実行可能である。
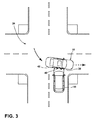
動作時には、1つまたは複数のタイプのセンサ20、22、24(以降では「センサ」と称する)が、前進方向に動いているホスト車両30の前面の直近で交差点34に侵入している妨害車両32を検出する。用語「センサ」には、複数のタイプのセンサと、複数の異なる数の、各タイプのセンサとが含まれている。交差点34への侵入において、妨害車両32は、図2の矢印によって示されているように、左方向に旋回するか、または、ホスト車両30の経路を横切る道路に沿った直線の経路を進む。
Claims (20)
- 車両衝突を緩和する方法であって、
ホスト車両の経路に侵入している妨害車両の位置、速度および運動方向をセンシングすることと、
前記ホスト車両と前記妨害車両との衝突が差し迫っており、回避できないものであるか否かを特定することと、
前記ホスト車両と前記妨害車両との衝突が差し迫っており、回避できないものである場合に、前記妨害車両との衝突を緩和するために前記ホスト車両の前記経路を変更することと、
を含む、
ことを特徴とする、車両衝突を緩和する方法。 - 前記妨害車両の衝突領域を特定することをさらに含み、
前記妨害車両との衝突を緩和するために前記ホスト車両の経路を変更する前記ステップは、衝突を緩和する、前記妨害車両の前記衝突領域の1つに衝突するように、前記ホスト車両の前記経路を変更することを含む、請求項1に記載の、車両衝突を緩和する方法。 - 前記衝突領域を特定することは、前記妨害車両の、少なくともサイドドア区画領域を特定することを含む、
前記妨害車両との衝突を緩和するために前記ホスト車両の経路を変更する前記ステップは、前記サイドドア区画領域との衝突を回避するように前記経路を変更することを含む、請求項2に記載の、車両衝突を緩和する方法。 - 前記衝突領域を特定することは、後輪領域を特定することを含む、
前記妨害車両との衝突を緩和するために前記ホスト車両の経路を変更する前記ステップは、前記妨害車両との衝突を緩和するために、前記後輪領域と衝突するように前記経路を変更することを含む、請求項3に記載の、車両衝突を緩和する方法。 - 前記ホスト車両の位置、速度および運動方向データを取得することを含み、
前記妨害車両との衝突を緩和するために前記ホスト車両の経路を変更する前記ステップは、前記ホスト車両の前記経路の変更を特定するために、前記妨害車両の位置、速度および運動方向と、前記ホスト車両の位置、速度および運動方向データとを比較することを含む、請求項3に記載の、車両衝突を緩和する方法。 - 前記妨害車両との衝突を緩和するために前記ホスト車両の経路を変更する前記ステップは、前記経路の変更を特定するために、前記ホスト車両および前記妨害車両の、当該車両間の衝突の際の未来の位置と向きとを予測することを含む、請求項3に記載の、車両衝突を緩和する方法。
- 前記ホスト車両の経路を変更する前記ステップは、前記ホスト車両の走行方向を変更するためにアクティブな操舵インプットを供給することと、差動ブレーキを実行するために前記ホスト車両のブレーキシステムを制御することとから成るグループのうちの少なくとも1つを含む、請求項1に記載の、車両衝突を緩和する方法。
- 衝突の間の横断車両に対する衝撃を緩和するための、ホスト車両用の車両衝突緩和システムであって、当該システムは、
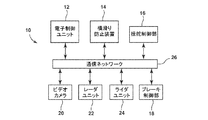
前記ホスト車両の前面に位置している、前記ホスト車両の経路に侵入している対象物の速度、方向および位置を含むデータを検出する少なくとも1つの車両センサと、
前記ホスト車両に配置された不揮発性メモリを含む制御ユニットと、
を備え、当該制御ユニットは、
前記ホスト車両の経路に侵入している、センシングされた妨害車両のデータであって、前記妨害車両の位置、速度および運動方向を含むデータを少なくとも1つの車両センサから受信し、
前記ホスト車両の経路への前記妨害車両の進入を特定し、
前記妨害車両の、後輪領域とサイドドア区画領域とを含む衝突領域を特定し、
前記ホスト車両の位置、速度および方向データを受信し、
前記ホスト車両と前記妨害車両との衝突が差し迫っており、回避できないものであるか否かを特定し、
前記ホスト車両と前記妨害車両との衝突が差し迫っており、回避できないものである場合には、前記特定および受信したデータに応答して、衝突を緩和するために、前記サイドドア区画領域から離れた、前記妨害車両の前記衝突領域の1つに接触するように、前記ホスト車両の経路を変更する、
ように構成されていることを特徴とする車両衝突緩和システム。 - 前記制御ユニットは、衝突時の、前記ホスト車両の未来の位置と向きとに対して相対的に、前記妨害車両の未来の位置と向きとを予測するように構成されている、請求項8に記載の車両衝突緩和システム。
- 前記ホスト車両の走行方向を変更するためのアクティブな操舵インプットを供給することと、差動ブレーキを実行するために前記ホスト車両のブレーキシステムを制御することとから成るグループのうちの少なくとも1つを実行することによって、前記妨害車両の前記衝突領域のいずれに衝突するのかを調整するように、前記制御ユニットは構成されている、請求項9に記載の車両衝突緩和システム。
- 前記アクティブな操舵インプットは横滑り防止装置によって制御され、前記ブレーキシステムは前記横滑り防止装置からのアウトプットによって制御される、請求項10に記載の車両衝突緩和システム。
- 前記制御ユニットは、前記後輪領域に衝突するように、前記ホスト車両の走行方向を変更するように構成されている、請求項10に記載の車両衝突緩和システム。
- 前記衝突緩和システムは、前記ホスト車両が前進方向に、前記経路に沿って動いている間に前記ホスト車両の前記経路に侵入している前記妨害車両によってトリガされる、請求項9に記載の車両衝突緩和システム。
- 前記制御ユニットは、前記ホスト車両の前面が、前記妨害車両の前記後輪領域と衝突するように、前記ホスト車両を制御するように構成されている、請求項13に記載の車両衝突緩和システム。
- 前記少なくとも1つの車両センサは、ビデオカメラと、レーダユニットおよびライダユニットのうちの少なくとも1つとを含む、請求項8に記載の車両衝突緩和システム。
- 前記制御ユニットは、前記ビデオカメラから受信したビデオデータから、前記妨害車両の前記衝突領域を識別するように構成されている、請求項15に記載の車両衝突緩和システム。
- 前記制御ユニットは、差動ブレーキを実行するために前記ホスト車両のブレーキシステムを制御することによって、前記妨害車両の前記衝突領域のいずれに衝突するのかを調整するように構成されており、前記差動ブレーキによって、ヨーレートおよび水平方向位置に影響を与えるために、前記ホスト車両へのモーメントが生じ、これによって、操舵機能が制限される、請求項9に記載の車両衝突緩和システム。
- ホスト車両と妨害車両との車両衝突を緩和する方法であって、
前記ホスト車両の前進経路に侵入している前記妨害車両の位置、速度および運動方向をセンシングすることと、
前記妨害車両の衝突領域を特定することと、
前記ホスト車両の位置、速度および方向データを取得することと、
前記ホスト車両および前記妨害車両の未来の位置と向きとを予測することによって、前記ホスト車両と前記妨害車両との衝突が差し迫っており、回避できないものであるか否かを特定することと、
前記ホスト車両と前記妨害車両との衝突が差し迫っており、回避できないものである場合に、前記ホスト車両が、衝突を緩和する、前記妨害車両の前記衝突領域の1つと衝突するように、前記ホスト車両の経路を変更することと、
を含むことを特徴とする、車両衝突を緩和する方法。 - 前記妨害車両の前記衝突領域を特定する前記ステップは、少なくとも後輪領域、前輪領域およびサイドドア区画領域を特定することを含み、
経路を変更する前記ステップは、前記ホスト車両が前記サイドドア区画領域との衝突を回避するまたは最小化するように、前記経路を変更することを含む、請求項18に記載の方法。 - 前記妨害車両の衝突領域を特定する前記ステップは、少なくとも前記後輪領域、前記前輪領域および前記サイドドア区画領域の存在および位置を特定するために、ビデオカメラによって前記妨害車両の側面をセンシングすることと、前記妨害車両の特徴を分類するためにビデオデータを処理することとを含む、請求項19に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/527,158 | 2014-10-29 | ||
| US14/527,158 US9440649B2 (en) | 2014-10-29 | 2014-10-29 | Impact mitigation by intelligent vehicle positioning |
| PCT/US2015/057467 WO2016069529A1 (en) | 2014-10-29 | 2015-10-27 | Impact mitigation by intelligent vehicle positioning |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017534520A true JP2017534520A (ja) | 2017-11-24 |
Family
ID=54478982
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017523209A Pending JP2017534520A (ja) | 2014-10-29 | 2015-10-27 | インテリジェントな車両のポジショニングによる衝撃緩和 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9440649B2 (ja) |
| EP (1) | EP3212482A1 (ja) |
| JP (1) | JP2017534520A (ja) |
| KR (1) | KR102012171B1 (ja) |
| CN (1) | CN107107853A (ja) |
| WO (1) | WO2016069529A1 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9902397B2 (en) * | 2014-07-30 | 2018-02-27 | Komatsu Ltd. | Transporter vehicle and transporter vehicle control method |
| WO2017056374A1 (ja) | 2015-09-29 | 2017-04-06 | ソニー株式会社 | 被害低減装置、被害低減方法およびプログラム |
| KR101782368B1 (ko) * | 2015-12-22 | 2017-10-23 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| US9701307B1 (en) | 2016-04-11 | 2017-07-11 | David E. Newman | Systems and methods for hazard mitigation |
| JP6518217B2 (ja) * | 2016-08-25 | 2019-05-22 | 株式会社Subaru | 前輪転舵制御装置 |
| DE102017216083B4 (de) * | 2016-09-13 | 2023-08-17 | Hl Klemove Corp. | Vorrichtung und Verfahren zur Stoßabsorption für ein Fahrzeug |
| DE102017201936A1 (de) | 2017-02-08 | 2018-08-09 | Robert Bosch Gmbh | Verfahren zur Reduzierung eines Kollisionsschadens |
| JP6580087B2 (ja) * | 2017-06-02 | 2019-09-25 | 本田技研工業株式会社 | 走行軌道決定装置及び自動運転装置 |
| US10703361B2 (en) | 2017-06-14 | 2020-07-07 | Toyota Motor Engineering & Manufacturing North America, Inc. | Vehicle collision mitigation |
| JP6638172B2 (ja) * | 2017-10-04 | 2020-01-29 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| CN107673283A (zh) * | 2017-11-17 | 2018-02-09 | 芜湖金智王机械设备有限公司 | 无人驾驶叉车的控制系统 |
| CN107933475A (zh) * | 2017-11-21 | 2018-04-20 | 重庆电讯职业学院 | 一种减少碰撞损伤的汽车防碰撞系统 |
| US10589740B2 (en) * | 2018-04-16 | 2020-03-17 | Hyundai Motor Company | Automated collision mitigation system of a vehicle and method thereof |
| KR101956685B1 (ko) * | 2018-05-14 | 2019-03-13 | 주식회사 만도 | 차량의 충돌 완화 장치 및 방법 |
| CN109087485B (zh) * | 2018-08-30 | 2021-06-08 | Oppo广东移动通信有限公司 | 驾驶提醒方法、装置、智能眼镜及存储介质 |
| US11288750B1 (en) * | 2018-10-31 | 2022-03-29 | United Services Automobile Association (Usaa) | Method and system for automatically detecting vehicle collisions for insurance claims |
| US11427195B1 (en) * | 2020-02-07 | 2022-08-30 | Ambarella International Lp | Automatic collision detection, warning, avoidance and prevention in parked cars |
| CN113306550B (zh) * | 2021-06-25 | 2023-03-03 | 北京梧桐车联科技有限责任公司 | 车辆紧急避险方法及装置、车载设备及存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005001792A1 (de) * | 2003-06-30 | 2005-01-06 | Robert Bosch Gmbh | Vorrichtung und verfahren zur verringerung des verletzungsrisikos von fahrzeuginsassen bei einem unfall |
| JP2007091208A (ja) * | 2005-08-31 | 2007-04-12 | Honda Motor Co Ltd | 車両の走行安全装置 |
| JP2008037313A (ja) * | 2006-08-08 | 2008-02-21 | Toyota Motor Corp | 車両制御装置、車両制御システム、及び車両制御方法 |
| DE102008005310A1 (de) * | 2008-01-21 | 2009-07-23 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Beeinflussung der Bewegung eines Fahrzeugs bei vorzeitigem Erkennen einer unvermeidbaren Kollision mit einem Hindernis |
| JP2010068069A (ja) * | 2008-09-09 | 2010-03-25 | Denso Corp | 車両周辺撮影システム |
| JP2010086895A (ja) * | 2008-10-02 | 2010-04-15 | Molex Inc | Fpc用コネクタ |
| EP2724910A1 (de) * | 2012-10-26 | 2014-04-30 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Reduzieren von medizinischen Unfallfolgen bei unvermeidbaren Unfällen im Querverkehr |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19741631B4 (de) | 1997-09-20 | 2013-08-14 | Volkswagen Ag | Verfahren und Vorrichtung zur Vermeidung und/oder Minimierung von Konfliktsituationen im Straßenverkehr |
| JP4440708B2 (ja) * | 2004-06-04 | 2010-03-24 | トヨタ自動車株式会社 | 車両の制御装置 |
| DE602005001615T2 (de) * | 2005-04-29 | 2008-04-10 | Ford Global Technologies, LLC, Dearborn | Verfahren und System zur Vorwärts-Kollisionsverhinderung für ein Kraftfahrzeug |
| US20070276600A1 (en) | 2006-03-06 | 2007-11-29 | King Timothy I | Intersection collision warning system |
| US20080306666A1 (en) * | 2007-06-05 | 2008-12-11 | Gm Global Technology Operations, Inc. | Method and apparatus for rear cross traffic collision avoidance |
| JP4835521B2 (ja) * | 2007-06-18 | 2011-12-14 | 株式会社デンソー | 衝突緩和装置 |
| US8380424B2 (en) * | 2007-09-28 | 2013-02-19 | The Boeing Company | Vehicle-based automatic traffic conflict and collision avoidance |
| JP5309633B2 (ja) * | 2007-11-16 | 2013-10-09 | アイシン・エィ・ダブリュ株式会社 | 車両制御装置、車両制御方法及びコンピュータプログラム |
| DE112008004027A5 (de) | 2008-10-06 | 2011-09-29 | Alexander Augst | Verfahren zur Minderung von Kollisionsrisiken |
| DE102009009472B4 (de) * | 2009-02-19 | 2021-12-30 | Volkswagen Aktiengesellschaft | Verfahren zum Unterstützen eines Fahrers eines Fahrzeugs und Fahrerassistenzsystem für ein Fahrzeug |
| US8577550B2 (en) | 2009-10-05 | 2013-11-05 | Ford Global Technologies, Llc | System for vehicle control to mitigate intersection collisions and method of using the same |
| DE102009058154A1 (de) * | 2009-12-12 | 2011-06-16 | Wabco Gmbh | Fahrerassistenzsystem für ein Fahrzeug, insbesondere Nutzfahrzeug, sowie Verfahren zum Steuern eines Bremssystems |
| US8509982B2 (en) * | 2010-10-05 | 2013-08-13 | Google Inc. | Zone driving |
| KR101029096B1 (ko) * | 2010-11-18 | 2011-04-13 | 김은숙 | 차량의 측면 충돌 회피 방법 |
| US8466807B2 (en) | 2011-06-01 | 2013-06-18 | GM Global Technology Operations LLC | Fast collision detection technique for connected autonomous and manual vehicles |
| DE102011103652A1 (de) * | 2011-06-08 | 2011-12-29 | Daimler Ag | Verfahren zum Unterstützen eines Fahrers eines Kraftfahrzeugs bei einer Gegenverkehrssituation und einer passiven Beteiligung an einem Überholvorgang |
| US20130030651A1 (en) * | 2011-07-25 | 2013-01-31 | GM Global Technology Operations LLC | Collision avoidance maneuver through differential braking |
| KR20130013997A (ko) * | 2011-07-29 | 2013-02-06 | 현대자동차주식회사 | 차량의 충돌 방지장치 및 방법 |
| DE102011115223A1 (de) | 2011-09-24 | 2013-03-28 | Audi Ag | Verfahren zum Betrieb eines Sicherheitssystems eines Kraftfahrzeugs und Kraftfahrzeug |
| DE102011115875B4 (de) | 2011-10-12 | 2023-03-23 | Volkswagen Aktiengesellschaft | Verfahren für ein Fahrerassistenzsystem eines Fahrzeugs |
| EP2772384B1 (en) * | 2011-10-24 | 2018-09-05 | Kawasaki Jukogyo Kabushiki Kaisha | Electric vehicle |
| US8706393B2 (en) * | 2012-01-10 | 2014-04-22 | Ford Global Technologies, Llc | Intersection collision avoidance with adaptable vehicle dimensions |
| US8930128B2 (en) * | 2012-02-27 | 2015-01-06 | Lit Motors Corporation | Vehicle collision mitigation system |
| EP2654028B1 (en) | 2012-04-20 | 2018-09-26 | Honda Research Institute Europe GmbH | Orientation sensitive traffic collision warning system |
| DE102012208712A1 (de) * | 2012-05-24 | 2013-11-28 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Vermeiden oder Abmildern einer Kollision eines Fahrzeugs mit einem Hindernis |
| US8849515B2 (en) | 2012-07-24 | 2014-09-30 | GM Global Technology Operations LLC | Steering assist in driver initiated collision avoidance maneuver |
| CN103072575B (zh) * | 2013-01-18 | 2016-03-30 | 浙江吉利汽车研究院有限公司杭州分公司 | 一种车辆主动防碰撞方法 |
| US9069080B2 (en) * | 2013-05-24 | 2015-06-30 | Advanced Scientific Concepts, Inc. | Automotive auxiliary ladar sensor |
| US9396659B2 (en) * | 2013-12-12 | 2016-07-19 | Lenovo Enterprise Solutions (Singapore) Pte. Ltd. | Collision avoidance among vehicles |
-
2014
- 2014-10-29 US US14/527,158 patent/US9440649B2/en active Active
-
2015
- 2015-10-27 WO PCT/US2015/057467 patent/WO2016069529A1/en active Application Filing
- 2015-10-27 JP JP2017523209A patent/JP2017534520A/ja active Pending
- 2015-10-27 CN CN201580059340.4A patent/CN107107853A/zh active Pending
- 2015-10-27 KR KR1020177011542A patent/KR102012171B1/ko active IP Right Grant
- 2015-10-27 EP EP15791842.6A patent/EP3212482A1/en not_active Ceased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005001792A1 (de) * | 2003-06-30 | 2005-01-06 | Robert Bosch Gmbh | Vorrichtung und verfahren zur verringerung des verletzungsrisikos von fahrzeuginsassen bei einem unfall |
| JP2007091208A (ja) * | 2005-08-31 | 2007-04-12 | Honda Motor Co Ltd | 車両の走行安全装置 |
| JP2008037313A (ja) * | 2006-08-08 | 2008-02-21 | Toyota Motor Corp | 車両制御装置、車両制御システム、及び車両制御方法 |
| DE102008005310A1 (de) * | 2008-01-21 | 2009-07-23 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Beeinflussung der Bewegung eines Fahrzeugs bei vorzeitigem Erkennen einer unvermeidbaren Kollision mit einem Hindernis |
| JP2010068069A (ja) * | 2008-09-09 | 2010-03-25 | Denso Corp | 車両周辺撮影システム |
| JP2010086895A (ja) * | 2008-10-02 | 2010-04-15 | Molex Inc | Fpc用コネクタ |
| EP2724910A1 (de) * | 2012-10-26 | 2014-04-30 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Reduzieren von medizinischen Unfallfolgen bei unvermeidbaren Unfällen im Querverkehr |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160121884A1 (en) | 2016-05-05 |
| KR102012171B1 (ko) | 2019-10-21 |
| CN107107853A (zh) | 2017-08-29 |
| KR20170063865A (ko) | 2017-06-08 |
| EP3212482A1 (en) | 2017-09-06 |
| US9440649B2 (en) | 2016-09-13 |
| WO2016069529A1 (en) | 2016-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017534520A (ja) | インテリジェントな車両のポジショニングによる衝撃緩和 | |
| US9656667B2 (en) | Method for minimizing automatic braking intrusion based on collision confidence | |
| CN106043297B (zh) | 在反向操作期间基于前轮跑偏的避撞 | |
| EP3091370B1 (en) | Method and arrangement for determining safe vehicle trajectories | |
| JP6404634B2 (ja) | 予測的な先進運転支援システムの一貫性のある挙動生成 | |
| JP6380920B2 (ja) | 車両制御装置 | |
| WO2015198426A1 (ja) | 車両制御装置 | |
| US11427166B2 (en) | Adaptive AEB system considering steerable path and control method thereof | |
| JP7096350B2 (ja) | 走行制御装置、車両及び走行制御方法 | |
| JP7070737B2 (ja) | 車両の乗員に警報を提供するためのシステムおよび方法 | |
| JP2018067102A (ja) | 車両制御装置 | |
| US11142193B2 (en) | Vehicle and method for performing inter-vehicle distance control | |
| JP2017182768A (ja) | 衝突回避装置 | |
| JP2012045984A (ja) | 衝突軽減装置 | |
| WO2021187202A1 (en) | Systems and methods for adapting activation of alerts according to curvature of a target path | |
| US20230286478A1 (en) | Travel control device and travel control method | |
| KR20200119068A (ko) | 차량 및 그 제어방법 | |
| JP2005122274A (ja) | 車輌の走行態様判定制御装置 | |
| KR20220029862A (ko) | 차량의 충돌 방지 제어 시스템 및 방법 | |
| JP2022089631A (ja) | 車両制御システム | |
| JP2010254004A (ja) | 車両用走行制御装置 | |
| CN117698710A (zh) | Aeb功能的执行优化方法、装置、设备及存储介质 | |
| JP2021066403A (ja) | 車両制御装置 | |
| JP2008308128A (ja) | 衝突緩和装置 | |
| KR20190114366A (ko) | 차량의 패시브 안전 구동장치 및 그 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170628 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180628 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180709 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181005 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190401 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190730 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20190730 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20190808 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20190813 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20191011 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20191023 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200114 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20200323 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200409 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20200528 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20200528 |