KR20170063865A - 지능형 차량 위치 설정에 의한 충격 완화 방법 및 시스템 - Google Patents
지능형 차량 위치 설정에 의한 충격 완화 방법 및 시스템 Download PDFInfo
- Publication number
- KR20170063865A KR20170063865A KR1020177011542A KR20177011542A KR20170063865A KR 20170063865 A KR20170063865 A KR 20170063865A KR 1020177011542 A KR1020177011542 A KR 1020177011542A KR 20177011542 A KR20177011542 A KR 20177011542A KR 20170063865 A KR20170063865 A KR 20170063865A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- host vehicle
- collision
- intervention
- host
- Prior art date
Links
- 230000000116 mitigating effect Effects 0.000 title claims abstract description 31
- 238000000034 method Methods 0.000 claims abstract description 19
- 230000008859 change Effects 0.000 claims description 9
- 230000004308 accommodation Effects 0.000 claims description 3
- 230000004044 response Effects 0.000 claims description 3
- 230000006870 function Effects 0.000 claims description 2
- 238000004891 communication Methods 0.000 description 6
- 230000003116 impacting effect Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/085—Taking automatic action to adjust vehicle attitude in preparation for collision, e.g. braking for nose dropping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B60W2420/408—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/42—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/52—Radar, Lidar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/81—Braking systems
Abstract
차량 충돌의 충격을 완화하기 위한 방법 및 시스템은 호스트 차량과, 호스트 차량의 경로로 이동하였거나 이동하는 개입 차량의 이동 데이터의 위치, 속도, 배향, 및 방향을 감지한다. 제어 유닛은 데이터를 분석하고, 충돌이 불가피한지를 결정한다. 그러하다면, 제어 유닛은 충돌의 영향을 최소화하는 호스트 차량의 차량 경로를 결정한다. 차량 경로를 변경하는 것에 의해, 충돌의 충격은 덜 직접적이며, 차량 모두의 영향은 일정 정도 완화된다.
Description
본 발명은 호스트 차량과 호스트 차량의 경로에 진입하는 차량의 사이드 도어 객실(side door compartment zone)의 직접 충격 충돌을 감소시키기 위한 방법 및 시스템에 관한 것이다.
임박한 충돌에 대한 경고를 제공하고 및/또는 충돌을 피하도록 브레이크 시스템을 자동으로 작동시키는 차량 충돌 방지 시스템이 공지되어 있다.
본 발명의 목적은 지능형 차량 위치 설정에 의한 충격 완화 방법 및 시스템을 제공한다.
한 실시예에서, 본 발명은, 호스트 차량의 주행 경로에 진입하는 개입 차량(interfering vehicle)의 위치, 이동 속도 및 방향을 감지하는 단계, 상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피한지를 결정하는 단계, 및 상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피할 때, 상기 개입 차량과의 충돌을 완화하도록 상기 호스트 차량의 주행 경로를 변경하는 단계를 포함한다.
한 실시예에서, 상기 충돌 구역을 결정하는 단계는 상기 개입 차량의 사이드 도어 객실 구역, 후방 타이어 구역, 및 전방 타이어 구역을 결정하는 단계를 포함한다. 다른 실시예에서, 상기 개입 차량과의 충돌을 완화하기 위해 상기 호스트 차량의 주행 경로를 변경하는 단계는 사이드 도어 객실 구역을 피하는 것에 의해 충돌을 완화하는 상기 개입 차량의 충돌 구역들 중 하나에 충격을 주도록 호스트 차량의 주행 경로를 변경하는 단계를 포함한다.
한 실시예는 호스트 차량에 대한 이동 데이터의 위치, 속도 및 방향을 획득하는 단계를 포함하고, 상기 충돌을 완화하기 위해 호스트 차량의 주행 경로를 변경하는 단계는 상기 호스트 차량의 주행 경로의 변경을 결정하도록 상기 개입 차량의 위치, 이동 속도 및 방향과 상기 호스트 차량에 대한 위치, 이동 속도 및 방향을 비교하는 단계를 포함한다. 한 실시예는 주행 경로의 변경을 결정하도록 그 사이에서 충돌에 대한 상기 호스트 차량 및 상기 개입 차량의 추후 위치 및 배향을 예측하는 단계를 포함한다. 그러므로, 개입 차량의 추후 위치 및 배향은 충격 시에 호스트 차량의 추후 위치 및 배향에 상대적이다.
일부 실시예에서, 상기 호스트 차량의 주행 경로를 변경하는 단계는 상기 호스트 차량의 구동 방향을 변경하도록 능동 조향 입력(active steering input)을 제공하고 차동 제동(differential braking)을 수행하도록 상기 호스트 차량의 제동 시스템을 제어하는 그룹 중 적어도 하나를 포함한다.
또 다른 실시예에서, 본 발명은 충돌 동안 교차 차량(crossing vehicle)에 대한 충격을 완화하도록 호스트 차량을 위한 차량 충돌 완화 시스템을 제공하며, 시스템은, 상기 호스트 차량의 주행 경로에 진입하는 물체의 속도, 방향, 및 위치를 포함하는 데이터를 검출하기 위하여 상기 호스트 차량의 전방에 배치되는 적어도 하나의 차량 센서; 상기 호스트 차량에 배치된 비휘발성 메모리를 포함하는 제어 유닛을 포함하며, 상기 제어 유닛은, 상기 호스트 차량의 주행 경로에 진입하는 감지된 개입 차량의 적어도 하나의 차량 센서로부터, 상기 개입 차량의 위치, 이동의 속도 및 방향을 포함하는 데이터를 수신하고; 상기 호스트 차량의 주행 경로 내로 상기 개입 차량의 진입을 결정하고; 후방 타이어 구역 및 사이드 도어 객실 구역을 포함하는 상기 개입 차량의 충돌 구역들을 결정하고; 상기 호스트 차량에 대한 위치, 속도 및 방향 데이터를 수신하고; 상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피한지를 결정하고; 상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피할 때, 상기 결정 및 수신된 데이터에 응답하여, 충돌을 완화하도록 상기 사이드 도어 객실 구역으로부터 멀리 상기 개입 차량의 충돌 구역들 중 하나를 접촉하도록 상기 호스트 차량의 주행 경로를 변경하도록 구성된다.
한 실시예에서, 차량 컨트롤러는 주행 및 다가오는 차량들의 인접 차선에 진입하는 차량의 위험을 완화하도록 차량 방향 보정(vehicle directional corrections)을 기록하도록 구성된다.
한 실시예에서, 차량 센서는 비디오 카메라와, 레이더 유닛 및 라이더 유닛(lidar unit) 중 적어도 하나를 포함한다. 또한, 제어 유닛은 비디오 카메라로부터 수신된 비디오 데이터로부터 개입 차량의 구역들을 확인하고, 요 레이트(yaw rate)와 측면 위치에 영향을 주도록 상기 호스트 차량의 결과적인 모멘트(resulting moment)를 제공하고, 차동 제동을 수행하도록 상기 호스트 차량의 제동 시스템을 제어하고 이에 의해 제한된 조향 기능을 제공하는 것에 의해, 상기 개입 차량의 구역들 중 충격을 받는 구역을 조정하도록 구성된다.
한 실시예에서, 충돌 완화 시스템은 상기 호스트 차량이 전진 방향으로 주행 경로를 따라서 움직이는 동안 상기 호스트 차량의 주행 경로에 진입하는 개입 차량에 의해 기동된다.
다른 실시예에서, 본 발명은 개입 차량과의 호스트 차량에 의한 차량 충돌을 완화하는 방법을 제공하며, 상기 방법은, 상기 호스트 차량의 전진 주행 경로에 진입하는 개입 차량의 위치, 이동 속도 및 방향을 감지하는 단계; 상기 개입 차량에 대한 충돌 구역들을 결정하는 단계; 상기 호스트 차량에 대한 위치, 속도 및 방향 데이터를 획득하는 단계; 상기 호스트 차량과 상기 개입 차량의 추후 위치 및 배향을 예측하는 것에 의해 상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피한지를 결정하는 단계; 및 상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피할 때, 충돌을 완화하는 상기 개입 차량의 충돌 구역들 중 하나와 상기 호스트 차량이 충돌하도록 상기 호스트 차량의 주행 경로를 변경하는 단계를 포함한다.
본 발명의 다른 양태들은 상세한 설명 및 첨부 도면을 고려하는 것에 의해 명백해질 것이다.
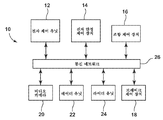
도 1은 차량 충돌 완화 시스템의 블록도.
도 2는 교차로에서 개입 차량에 접근하는 차량 충돌 완화 시스템이 장착된 호스트 차량의 제1 상황 예를 도시한 부감도(overhead view).
도 3은 차량 충돌 완화 시스템이 없는 차량 충돌의 부감도.
도 4는 차량 충돌 완화 시스템을 구비한 차량 충돌의 부감도.
도 5는 개입 차량에 대한 차량 충돌 결과의 부감도.
도 2는 교차로에서 개입 차량에 접근하는 차량 충돌 완화 시스템이 장착된 호스트 차량의 제1 상황 예를 도시한 부감도(overhead view).
도 3은 차량 충돌 완화 시스템이 없는 차량 충돌의 부감도.
도 4는 차량 충돌 완화 시스템을 구비한 차량 충돌의 부감도.
도 5는 개입 차량에 대한 차량 충돌 결과의 부감도.
본 발명의 임의의 실시예가 상세하게 설명되기 전에, 본 발명이 그 적용에 있어서 다음의 상세한 설명에 설정되고 다음의 도면에 도시된 구성 및 구성 요소들의 상세로 제한되지 않는다는 것을 이해하여야 한다. 본 발명은 다른 실시예가 가능하고 다양한 방법으로 실시되거나 수행될 수 있다.
도 1은 충돌 동안 교차 차량에 대한 충격을 완화하도록 호스트 차량을 위한 차량 충돌 완화 시스템(10)을 도시한다. 완화 시스템(10)은 전자 제어 유닛(ECU)(12), 전자 안정 제어 장치(ESC)(14), 조향 제어 장치(16), 및 브레이크 제어 장치(18)을 포함한다. 한 실시예에서, 차량 충돌 완화 시스템(10)은 또한 데이터를 제공하는 비디오 카메라(20), 레이더 유닛(22) 및 라이더 유닛(24)을 포함한다. 일부 실시예에서, 비디오 카메라(20), 레이더 유닛(22) 및 라이더 유닛(24) 중 단일의 하나가 제공된다. 통신 네트워크(26)는 컨트롤, 유닛 및 비디오 카메라를 포함하는 다양한 디바이스들 사이에 통신을 제공한다. 도 1에 도시된 디바이스들이 차량 충돌 완화 시스템(10)의 구성 요소들이지만, 이것들은 다른 차량 시스템에 대한 다른 작업 또는 유사한 작업을 수행한다. 다양한 다른 차량 서브 시스템들은 또한 통신 네트워크(26)에 연결되고 서로 통신한다.
일부 구성에서, ECU(12)는 판독 전용 메모리(ROM)와 같은 메모리 모듈에 저장된 실행 가능한 프로그램을 가지는 프로세서를 포함한다. ECU(12)는 또한 통신 네트워크(26)를 통해 수신되는 다른 차량 유닛들로부터의 정보를 저장하기 위한 랜덤 액세스 메모리(RAM)를 포함한다. ECU(12)의 비일시적 컴퓨터 판독 가능 메모리 모듈은 휘발성 메모리, 비휘발성 메모리, 또는 그 조합을 포함할 수 있으며, 다양한 구성에서, 운영 체제 소프트웨어, 애플리케이션/명령 데이터, 및 그 조합을 또한 저장할 수 있다. ECU(12)는 호스트 차량(30)에 제공되어, 도 2에 도시된 교차로(30) 상에서 도시된 바와 같이 개입 차량(32)의 존재 감지를 수행하고, 다음에 설명되는 바와 같은 출력을 제공한다.
ESC(14)는 호스트 차량(30)의 구동을 제어하는 출력을 제공하도록 동작한다. 또한, 조향 제어 장치(16)는 특정 상황에서 차량을 조향하도록 사용자 제어의 제한된 오버라이딩(overriding)을 가능하게 한다. 브레이크 제어 장치(18)는 특정 상황에서 유압 브레이크 시스템 또는 다른 브레이크 시스템의 자동 제어를 가능하게 하도록 제공된다.
비디오 카메라(20)는 도 2에 도시된 바와 같이 호스트 차량(30)의 전방에 장착된다. 비디오 카메라(20)는 배향 또는 개입 차량에 제공되는 표면들 또는 구역들을 포함하는, 도 2에 도시된 개입 차량(32)과 같은 물체의 존재를 감지하는 작용을 한다. 단일 비디오 카메라(20)가 도 2에 도시되어 있지만, 호스트 차량(30)의 전방측에 배치된 이격된 쌍의 비디오 카메라들이 고려된다. 마찬가지로, 레이더 유닛(22)은 호스트 차량(30)으로부터 개입 차량(32)의 존재 및 거리를 감지한다. 일부 실시예에서, 단일 유닛 대신에, 레이더 유닛(22)은 도 2에 도시된 바와 같이 한 쌍의 이격된 전방을 향해 배향된 레이더 유닛들을 포함한다.
다른 실시예에서, 한 쌍의 광 검출 및 거리 측정(Light Detecting And Ranging, LIDAR)유닛(24)들은 호스트 차량(30)의 전방 또는 이에 인접하여 제공된다. 레이더 유닛(22)과 마찬가지로, 라이더 유닛(24)들은 호스트 차량(30)의 전방에서 물체들의 존재, 형상 및 거리를 결정하도록 의도된다. 라이더 유닛(24)들, 레이더 유닛(22)들, 및 비디오 카메라(20)의 시야는 호스트 차량(30)의 전방을 향해 배향된다. 3가지 형태의 차량 센서(20, 22, 24)들이 도 1에 도시되었지만, 단일 형태의 센서 또는 2가지 형태의 센서들이 차량 충돌 완화 시스템 (10)에 대해 전형적이다.
작동
작동 중에, 하나 이상의 형태의 센서(20, 22, 24)(이하, "센서")들은 전진 방향으로 이동하는 호스트 차량(30)의 바로 앞에서 교차로(34)에 진입하는 개입 차량(32)을 검출한다. 용어 "센서"는 다수의 형태의 센서들과, 다수의 상이한 수의 각각의 형태의 센서를 포함한다. 교차로(34)에 진입 시에, 개입 차량(32)은 도 2의 화살표로 도시된 바와 같이 좌측으로 선회하거나, 또는 호스트 차량(30)의 주행 경로를 가로지르는 도로를 따라 직선 경로를 따른다.
그 외에, 센서는 개입 차량(32)의 위치를 검출하고, 개입 차량의 이동 데이터의 속도 및 방향을 검출한다. 위치, 속도 및 방향 데이터는 통신 네트워크(26)를 통하여 ECU(12)에 제공된다. 동시에, 호스트 차량의 이동 데이터의 위치, 속도 및 방향은 ESC(14)로부터 통신 네트워크를 통하여 ECU(12)에 제공된다.
ECU(12)는 충돌이 임박하고 불가피한지를 결정하도록 호스트 차량(30)과 개입 차량(32) 모두로부터의 이동 데이터의 위치, 속도 및 방향을 분석한다. 그러하면, ECU(12)는 개입 차량(32)의 측부 상의 구역들을 결정한다. 전형적으로, 비디오 카메라(20) 및 개입 차량(32)의 차량 타이어들을 포함하는 그 이미지의 분석으로, ECU(12)는 전방 타이어 구역(38), 사이드 도어 객실 구역(40) 및 후방 타이어 구역(42)을 결정한다. 그러므로, ECU(12)는 적어도 전방 타이어 구역(38), 사이드 도어 객실 구역(40) 및 후방 타이어 구역(42)의 존재 및 위치를 결정하도록 차량의 특징을 분류하기 위하여 개입 차량의 넓은 측부의 비디오 데이터를 처리한다.
완화 시스템이 없는 충돌 회피 시스템에서, 호스트 차량(30)은, 티본 효과(T-bone effect)를 가지며 개입 차량의 측벽을 붕괴시키고 탑승객 또는 차량 운전자를 상해할 가능성이 있는 개입 차량(32)의 사이드 도어 객실 구역(40)과 충돌한다.
차량 충돌 완화 시스템(10)은 임박한 충돌을 나타내는 분석에 응답하여, 양 차량(30, 32)의 이동 데이터의 위치, 속도 및 방향으로부터, 임박한 충돌의 심각성을 완화하는 경로를 결정한다. 차량 충돌 완화 시스템은 또한 개입 차량 상의 잠재적으로 덜 심각한 구역을 결정한다. 도 3에 도시된 바와 같이, 호스트 차량은 좌측 방향으로 선회하도록 제어된다. 한 실시예에서, 조향 제어 장치(16)는 ECU(12)로부터 입력을 수신하여, 차량 운전자와 관계없이 좌측 또는 우측으로 선회시킨다. 다른 실시예에서, ECU(12)는 브레이크 제어 장치(18)에 입력을 제공하여, 브레이크 제어 장치는 차동 제동을 수행하며, 이에 의해, 호스트 차량(30)은 좌측 또는 우측으로 선회된다. 어느 경우에도, 호스트 차량(30)은 잠재적으로 덜 심각한 충돌 구역, 예를 들어, 후방 타이어 구역(42)에서 개입 차량(32)에 충격을 준다.
개입 차량(32)의 후방 타이어 구역(42)과 같은 잠재적으로 덜 심각한 충돌 영역에 충격을 주는 것에 의해, 호스트 차량(30)의 전방은 차량(32)의 측벽을 붕괴시키지 않는다. 그러므로, 승객 또는 차량 운전자는 호스트 차량(30)과 직접 접촉 할 가능성을 피한다. 또한, 도 4에 도시된 바와 같이 후방 타이어 구역(42)을 접촉하는 것에 의해, 호스트 차량은 도 5에 도시된 방식으로 개입 차량(32)을 회전시거나 또는 선회시키는 힘을 인가한다. 회전에 의해, 충돌 에너지의 일부는 개입 차량(32)에 의해 흡수되지 않는다. 예를 들어, 이동 타이어의 마찰 및 개입 차량(32)의 중량의 이동은 후방 타이어 구역(42) 가까이에 있는 개입 차량(32)의 측벽에 의해 흡수되는 힘의 양을 감소시킨다. 따라서, 충돌의 결과는 전형적으로 덜 심각하다.
또한, 후방 타이어 구역(42)에 충격을 주고 개입 차량(32)을 회전시키는 것에 의해, 차량 전복의 가능성이 최소화된다.
많은 실시예에서, 차량 충돌 완화 시스템(10)은 충돌 방지 시스템에 추가된 특징이다. 그러므로, 동일한 센서 및 컨트롤들이 이용되지만, 다른 결과가 얻어진다.
일부 실시예에서, ECU(12)에 의해 수행되는 방법의 일부 또는 전부는 ESC(14)에 의해 수행된다.
따라서, 본 발명은 다른 것들 중에서도 차량 충돌의 심각성을 완화하기 위한 방법 및 시스템을 제공한다. 본 발명의 다양한 특징 및 이점은 다음의 청구항들에 기재되어 있다.
Claims (20)
- 차량 충돌을 완화하기 위한 방법으로서,
호스트 차량의 주행 경로에 진입하는 개입 차량의 위치, 이동의 속도 및 방향을 감지하는 단계;
상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피한지를 결정하는 단계; 및
상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피할 때, 상기 개입 차량과의 충돌을 완화하도록 상기 호스트 차량의 주행 경로를 변경하는 단계를 포함하는 방법. - 제1항에 있어서, 상기 개입 차량에 대한 충돌 구역들을 결정하는 단계를 추가로 포함하며;
상기 개입 차량과의 충돌을 완화하도록 상기 호스트 차량의 주행 경로를 변경하는 단계는 충돌을 완화하는 상기 개입 차량의 충돌 구역들 중 하나에 충격을 주도록 상기 호스트 차량의 주행 경로를 변경하는 단계를 포함하는 방법. - 제2항에 있어서, 상기 충돌 구역들을 결정하는 단계는 상기 개입 차량에 대해 적어도 사이드 도어 객실 구역을 결정하는 단계를 포함하며,
상기 개입 차량과의 충돌을 완화하도록 상기 호스트 차량의 주행 경로를 변경하는 단계는 상기 사이드 도어 객실 구역과의 충돌을 피하도록 상기 주행 경로를 변경하는 단계를 포함하는 방법. - 제3항에 있어서, 상기 충돌 구역들을 결정하는 단계는 후방 타이어 구역을 결정하는 단계를 포함하며,
상기 개입 차량과의 충돌을 완화하도록 상기 호스트 차량의 주행 경로를 변경하는 단계는 상기 개입 차량과의 충돌을 완화하도록 상기 후방 타이어 구역과 충돌하도록 주행 경로를 변경하는 단계를 포함하는 방법. - 제3항에 있어서, 상기 호스트 차량에 대한 이동 데이터의 위치, 속도 및 방향을 획득하는 단계를 포함하고,
상기 개입 차량과의 충돌을 완화하도록 상기 호스트 차량의 주행 경로를 변경하는 단계는 상기 호스트 차량의 주행 경로의 변경을 결정하도록 상기 개입 차량의 위치, 이동 속도 및 방향과 상기 호스트 차량에 대한 위치, 이동 속도 및 방향을 비교하는 단계를 포함하는 방법. - 제3항에 있어서, 상기 개입 차량과의 충돌을 완화하도록 상기 호스트 차량의 주행 경로를 변경하는 단계는 상기 주행 경로의 변경을 결정하도록 그 사이에서 충돌에 대한 상기 호스트 차량 및 상기 개입 차량의 추후 위치 및 배향을 예측하는 단계를 포함하는 방법.
- 제1항에 있어서, 상기 호스트 차량의 주행 경로를 변경하는 단계는 상기 호스트 차량의 구동 방향을 변경하도록 능동 조향 입력을 제공하고 차동 제동을 수행하도록 상기 호스트 차량의 제동 시스템을 제어하는 그룹 중 적어도 하나를 포함하는 방법.
- 충돌 동안 교차 차량에 대한 충격을 완화하도록 호스트 차량을 위한 차량 충돌 완화 시스템으로서,
상기 호스트 차량의 주행 경로에 진입하는 물체의 속도, 방향, 및 위치를 포함하는 데이터를 검출하기 위하여 상기 호스트 차량의 전방에 배치되는 적어도 하나의 차량 센서;
상기 호스트 차량에 배치된 비휘발성 메모리를 포함하는 제어 유닛을 포함하며, 상기 제어 유닛은,
상기 호스트 차량의 주행 경로에 진입하는 감지된 개입 차량의 적어도 하나의 차량 센서로부터, 상기 개입 차량의 위치, 이동의 속도 및 방향을 포함하는 데이터를 수신하고;
상기 호스트 차량의 주행 경로 내로의 상기 개입 차량의 진입을 결정하고;
후방 타이어 구역 및 사이드 도어 객실 구역을 포함하는 상기 개입 차량의 충돌 구역들을 결정하고;
상기 호스트 차량에 대한 위치, 속도 및 방향 데이터를 수신하고;
상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피한지를 결정하고;
상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피할 때, 상기 결정 및 수신된 데이터에 응답하여, 충돌을 완화하도록 상기 사이드 도어 객실 구역으로부터 멀리 상기 개입 차량의 충돌 구역들 중 하나를 접촉시키기 위해 상기 호스트 차량의 주행 경로를 변경하도록 구성되는 차량 충돌 완화 시스템. - 제8항에 있어서, 상기 제어 유닛은 충격 시에 상기 호스트 차량의 추후 위치 및 배향에 대해 상기 개입 차량의 추후 위치 및 배향을 예측하도록 구성되는 차량 충돌 완화 시스템.
- 제9항에 있어서, 상기 제어 유닛은 상기 호스트 차량의 구동 방향을 변경하도록 능동 조향 입력을 제공하고 차동 제동을 수행하도록 상기 호스트 차량의 제동 시스템을 제어하는 그룹 중 적어도 하나를 수행하는 것에 의해 상기 개입 차량의 충돌 구역들 중 충격을 받는 구역을 조정하도록 구성되는 차량 충돌 완화 시스템.
- 제10항에 있어서, 상기 능동 조향 입력은 전자 안정 제어 장치에 의해 제어되며, 상기 제동 시스템은 상기 전자 안정 제어 장치로부터의 출력에 의해 제어되는 차량 충돌 완화 시스템.
- 제10항에 있어서, 상기 제어 유닛은 상기 후방 타이어 구역에 충격을 주기 위해 상기 호스트 차량의 구동 방향을 변경하도록 구성되는 차량 충돌 완화 시스템.
- 제9항에 있어서, 상기 충돌 완화 시스템은 상기 호스트 차량이 전진 방향으로 상기 주행 경로를 따라서 이동할 때 상기 호스트 차량의 주행 경로에 진입하는 상기 개입 차량에 의해 기동되는 차량 충돌 완화 시스템.
- 제13항에 있어서, 상기 제어 유닛은 상기 호스트 차량의 전방이 상기 개입 차량의 후방 타이어 구역과 충돌하도록 상기 호스트 차량을 제어하기 위해 구성되는 차량 충돌 완화 시스템.
- 제8항에 있어서, 상기 적어도 하나의 차량 센서는 비디오 카메라와, 레이더 유닛 및 라이더 유닛 중 적어도 하나를 포함하는 차량 충돌 완화 시스템.
- 제15항에 있어서, 상기 제어 유닛은 상기 비디오 카메라로부터 수신된 비디오 데이터로부터 상기 개입 차량의 충돌 구역들을 확인하도록 구성되는 차량 충돌 완화 시스템.
- 제9항에 있어서, 상기 제어 유닛은 요 레이트와 측면 위치에 영향을 주도록 상기 호스트 차량의 결과적인 모멘트(resulting moment)를 제공하는 차동 제동을 수행하도록 상기 호스트 차량의 제동 시스템을 제어하고, 이에 의해 제한된 조향 기능을 제공하는 것에 의해, 상기 개입 차량의 구역들 충격을 받는 구역을 조정하도록 구성되는 차량 충돌 완화 시스템.
- 개입 차량과의 호스트 차량에 의한 차량 충돌을 완화하는 방법으로서,
상기 호스트 차량의 전진 주행 경로에 진입하는 상기 개입 차량의 위치, 이동 속도 및 방향을 감지하는 단계;
상기 개입 차량에 대한 충돌 구역들을 결정하는 단계;
상기 호스트 차량에 대한 위치, 속도 및 방향 데이터를 획득하는 단계;
상기 호스트 차량과 상기 개입 차량의 추후 위치 및 배향을 예측하는 것에 의해 상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피한지를 결정하는 단계; 및
상기 호스트 차량과 상기 개입 차량 사이의 충돌이 임박하고 불가피할 때, 충돌을 완화하는 상기 개입 차량의 충돌 구역들 중 하나와 상기 호스트 차량이 충돌하도록 상기 호스트 차량의 주행 경로를 변경하는 단계를 포함하는 방법. - 제18항에 있어서, 상기 개입 차량에 대한 충돌 구역을 결정하는 단계는 적어도 후방 타이어 구역, 전방 타이어 구역, 및 사이드 도어 객실 구역을 결정하는 단계를 포함하며, 상기 주행 경로를 변경하는 단계는 상기 호스트 차량이 상기 사이드 도어 객실 구역과의 충돌을 피하거나 최소화하도록 상기 주행 경로를 변경하는 단계를 포함하는 방법.
- 제19항에 있어서, 상기 개입 차량에 대한 충돌 구역을 결정하는 단계는 비디오 카메라로 상기 개입 차량의 넓은 측부를 감지하는 단계, 및 적어도 상기 후방 타이어 구역, 상기 전방 타이어 구역, 및 상기 사이드 도어 객실 구역의 존재 및 위치를 결정하기 위해 상기 개입 차량의 특징을 분류하도록 비디오 데이터를 처리하는 단계를 포함하는 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/527,158 US9440649B2 (en) | 2014-10-29 | 2014-10-29 | Impact mitigation by intelligent vehicle positioning |
| US14/527,158 | 2014-10-29 | ||
| PCT/US2015/057467 WO2016069529A1 (en) | 2014-10-29 | 2015-10-27 | Impact mitigation by intelligent vehicle positioning |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170063865A true KR20170063865A (ko) | 2017-06-08 |
| KR102012171B1 KR102012171B1 (ko) | 2019-10-21 |
Family
ID=54478982
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177011542A KR102012171B1 (ko) | 2014-10-29 | 2015-10-27 | 지능형 차량 위치 설정에 의한 충격 완화 방법 및 시스템 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9440649B2 (ko) |
| EP (1) | EP3212482A1 (ko) |
| JP (1) | JP2017534520A (ko) |
| KR (1) | KR102012171B1 (ko) |
| CN (1) | CN107107853A (ko) |
| WO (1) | WO2016069529A1 (ko) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2893194C (en) * | 2014-07-30 | 2018-06-19 | Shigeru OHSUGI | Transporter vehicle and transporter vehicle control method |
| CN108025763B (zh) | 2015-09-29 | 2021-09-07 | 索尼公司 | 信号处理装置、信号处理方法和计算机可读存储介质 |
| KR101782368B1 (ko) * | 2015-12-22 | 2017-10-23 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| US9701307B1 (en) | 2016-04-11 | 2017-07-11 | David E. Newman | Systems and methods for hazard mitigation |
| JP6518217B2 (ja) * | 2016-08-25 | 2019-05-22 | 株式会社Subaru | 前輪転舵制御装置 |
| DE102017216083B4 (de) * | 2016-09-13 | 2023-08-17 | Hl Klemove Corp. | Vorrichtung und Verfahren zur Stoßabsorption für ein Fahrzeug |
| DE102017201936A1 (de) | 2017-02-08 | 2018-08-09 | Robert Bosch Gmbh | Verfahren zur Reduzierung eines Kollisionsschadens |
| JP6580087B2 (ja) * | 2017-06-02 | 2019-09-25 | 本田技研工業株式会社 | 走行軌道決定装置及び自動運転装置 |
| US10703361B2 (en) | 2017-06-14 | 2020-07-07 | Toyota Motor Engineering & Manufacturing North America, Inc. | Vehicle collision mitigation |
| JP6638172B2 (ja) * | 2017-10-04 | 2020-01-29 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| CN107673283A (zh) * | 2017-11-17 | 2018-02-09 | 芜湖金智王机械设备有限公司 | 无人驾驶叉车的控制系统 |
| CN107933475A (zh) * | 2017-11-21 | 2018-04-20 | 重庆电讯职业学院 | 一种减少碰撞损伤的汽车防碰撞系统 |
| US10589740B2 (en) * | 2018-04-16 | 2020-03-17 | Hyundai Motor Company | Automated collision mitigation system of a vehicle and method thereof |
| KR101956685B1 (ko) * | 2018-05-14 | 2019-03-13 | 주식회사 만도 | 차량의 충돌 완화 장치 및 방법 |
| CN109087485B (zh) * | 2018-08-30 | 2021-06-08 | Oppo广东移动通信有限公司 | 驾驶提醒方法、装置、智能眼镜及存储介质 |
| US11288750B1 (en) * | 2018-10-31 | 2022-03-29 | United Services Automobile Association (Usaa) | Method and system for automatically detecting vehicle collisions for insurance claims |
| US11427195B1 (en) * | 2020-02-07 | 2022-08-30 | Ambarella International Lp | Automatic collision detection, warning, avoidance and prevention in parked cars |
| CN113306550B (zh) * | 2021-06-25 | 2023-03-03 | 北京梧桐车联科技有限责任公司 | 车辆紧急避险方法及装置、车载设备及存储介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005348558A (ja) * | 2004-06-04 | 2005-12-15 | Toyota Motor Corp | 車両の制御装置 |
| JP2008308128A (ja) * | 2007-06-18 | 2008-12-25 | Denso Corp | 衝突緩和装置 |
| KR20130013997A (ko) * | 2011-07-29 | 2013-02-06 | 현대자동차주식회사 | 차량의 충돌 방지장치 및 방법 |
| KR20140020230A (ko) * | 2010-10-05 | 2014-02-18 | 구글 인코포레이티드 | 검출된 물체의 행동을 예측하기 위한 시스템 및 방법 |
| EP2724910A1 (de) * | 2012-10-26 | 2014-04-30 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Reduzieren von medizinischen Unfallfolgen bei unvermeidbaren Unfällen im Querverkehr |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19741631B4 (de) | 1997-09-20 | 2013-08-14 | Volkswagen Ag | Verfahren und Vorrichtung zur Vermeidung und/oder Minimierung von Konfliktsituationen im Straßenverkehr |
| DE10329567A1 (de) | 2003-06-30 | 2005-02-10 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Verringerung des Verletzungsrisikos von Fahrzeuginsassen bei einem Unfall |
| EP1717778B1 (en) * | 2005-04-29 | 2007-07-11 | Ford Global Technologies, LLC | Method and system for forward collision avoidance in an automotive vehicle |
| JP4823781B2 (ja) * | 2005-08-31 | 2011-11-24 | 本田技研工業株式会社 | 車両の走行安全装置 |
| US20070276600A1 (en) | 2006-03-06 | 2007-11-29 | King Timothy I | Intersection collision warning system |
| JP4952127B2 (ja) * | 2006-08-08 | 2012-06-13 | トヨタ自動車株式会社 | 車両制御装置、車両制御システム、及び車両制御方法 |
| US20080306666A1 (en) * | 2007-06-05 | 2008-12-11 | Gm Global Technology Operations, Inc. | Method and apparatus for rear cross traffic collision avoidance |
| US8380424B2 (en) * | 2007-09-28 | 2013-02-19 | The Boeing Company | Vehicle-based automatic traffic conflict and collision avoidance |
| JP5309633B2 (ja) * | 2007-11-16 | 2013-10-09 | アイシン・エィ・ダブリュ株式会社 | 車両制御装置、車両制御方法及びコンピュータプログラム |
| DE102008005310A1 (de) | 2008-01-21 | 2009-07-23 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Beeinflussung der Bewegung eines Fahrzeugs bei vorzeitigem Erkennen einer unvermeidbaren Kollision mit einem Hindernis |
| JP2010068069A (ja) * | 2008-09-09 | 2010-03-25 | Denso Corp | 車両周辺撮影システム |
| JP5006297B2 (ja) * | 2008-10-02 | 2012-08-22 | モレックス インコーポレイテド | Fpc用コネクタ |
| WO2010040376A1 (de) | 2008-10-06 | 2010-04-15 | Alexander Augst | Verfahren zur minderung von kollisionsrisiken |
| DE102009009472B4 (de) * | 2009-02-19 | 2021-12-30 | Volkswagen Aktiengesellschaft | Verfahren zum Unterstützen eines Fahrers eines Fahrzeugs und Fahrerassistenzsystem für ein Fahrzeug |
| US8577550B2 (en) | 2009-10-05 | 2013-11-05 | Ford Global Technologies, Llc | System for vehicle control to mitigate intersection collisions and method of using the same |
| DE102009058154A1 (de) * | 2009-12-12 | 2011-06-16 | Wabco Gmbh | Fahrerassistenzsystem für ein Fahrzeug, insbesondere Nutzfahrzeug, sowie Verfahren zum Steuern eines Bremssystems |
| KR101029096B1 (ko) * | 2010-11-18 | 2011-04-13 | 김은숙 | 차량의 측면 충돌 회피 방법 |
| US8466807B2 (en) | 2011-06-01 | 2013-06-18 | GM Global Technology Operations LLC | Fast collision detection technique for connected autonomous and manual vehicles |
| DE102011103652A1 (de) * | 2011-06-08 | 2011-12-29 | Daimler Ag | Verfahren zum Unterstützen eines Fahrers eines Kraftfahrzeugs bei einer Gegenverkehrssituation und einer passiven Beteiligung an einem Überholvorgang |
| US20130030651A1 (en) * | 2011-07-25 | 2013-01-31 | GM Global Technology Operations LLC | Collision avoidance maneuver through differential braking |
| DE102011115223A1 (de) | 2011-09-24 | 2013-03-28 | Audi Ag | Verfahren zum Betrieb eines Sicherheitssystems eines Kraftfahrzeugs und Kraftfahrzeug |
| DE102011115875B4 (de) | 2011-10-12 | 2023-03-23 | Volkswagen Aktiengesellschaft | Verfahren für ein Fahrerassistenzsystem eines Fahrzeugs |
| JP5711820B2 (ja) * | 2011-10-24 | 2015-05-07 | 川崎重工業株式会社 | 電動車両 |
| US8706393B2 (en) * | 2012-01-10 | 2014-04-22 | Ford Global Technologies, Llc | Intersection collision avoidance with adaptable vehicle dimensions |
| US8930128B2 (en) * | 2012-02-27 | 2015-01-06 | Lit Motors Corporation | Vehicle collision mitigation system |
| EP2654028B1 (en) | 2012-04-20 | 2018-09-26 | Honda Research Institute Europe GmbH | Orientation sensitive traffic collision warning system |
| DE102012208712A1 (de) * | 2012-05-24 | 2013-11-28 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Vermeiden oder Abmildern einer Kollision eines Fahrzeugs mit einem Hindernis |
| US8849515B2 (en) | 2012-07-24 | 2014-09-30 | GM Global Technology Operations LLC | Steering assist in driver initiated collision avoidance maneuver |
| CN103072575B (zh) * | 2013-01-18 | 2016-03-30 | 浙江吉利汽车研究院有限公司杭州分公司 | 一种车辆主动防碰撞方法 |
| US9069080B2 (en) * | 2013-05-24 | 2015-06-30 | Advanced Scientific Concepts, Inc. | Automotive auxiliary ladar sensor |
| US9396659B2 (en) * | 2013-12-12 | 2016-07-19 | Lenovo Enterprise Solutions (Singapore) Pte. Ltd. | Collision avoidance among vehicles |
-
2014
- 2014-10-29 US US14/527,158 patent/US9440649B2/en active Active
-
2015
- 2015-10-27 CN CN201580059340.4A patent/CN107107853A/zh active Pending
- 2015-10-27 KR KR1020177011542A patent/KR102012171B1/ko active IP Right Grant
- 2015-10-27 EP EP15791842.6A patent/EP3212482A1/en not_active Ceased
- 2015-10-27 JP JP2017523209A patent/JP2017534520A/ja active Pending
- 2015-10-27 WO PCT/US2015/057467 patent/WO2016069529A1/en active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005348558A (ja) * | 2004-06-04 | 2005-12-15 | Toyota Motor Corp | 車両の制御装置 |
| JP2008308128A (ja) * | 2007-06-18 | 2008-12-25 | Denso Corp | 衝突緩和装置 |
| KR20140020230A (ko) * | 2010-10-05 | 2014-02-18 | 구글 인코포레이티드 | 검출된 물체의 행동을 예측하기 위한 시스템 및 방법 |
| KR20130013997A (ko) * | 2011-07-29 | 2013-02-06 | 현대자동차주식회사 | 차량의 충돌 방지장치 및 방법 |
| EP2724910A1 (de) * | 2012-10-26 | 2014-04-30 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Reduzieren von medizinischen Unfallfolgen bei unvermeidbaren Unfällen im Querverkehr |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102012171B1 (ko) | 2019-10-21 |
| EP3212482A1 (en) | 2017-09-06 |
| WO2016069529A1 (en) | 2016-05-06 |
| US20160121884A1 (en) | 2016-05-05 |
| JP2017534520A (ja) | 2017-11-24 |
| CN107107853A (zh) | 2017-08-29 |
| US9440649B2 (en) | 2016-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102012171B1 (ko) | 지능형 차량 위치 설정에 의한 충격 완화 방법 및 시스템 | |
| CN108216225B (zh) | 碰撞回避辅助装置 | |
| US11415995B2 (en) | Control device for vehicle and control method of vehicle | |
| US9180881B2 (en) | Braking control system and method for vehicle | |
| JP6380920B2 (ja) | 車両制御装置 | |
| US11427166B2 (en) | Adaptive AEB system considering steerable path and control method thereof | |
| CN106043297A (zh) | 在反向操作期间基于前轮跑偏的避撞 | |
| JP7096350B2 (ja) | 走行制御装置、車両及び走行制御方法 | |
| US9849852B1 (en) | Intelligent deployment of safety mechanisms for autonomous vehicles | |
| US11142193B2 (en) | Vehicle and method for performing inter-vehicle distance control | |
| US9817397B1 (en) | Active safety mechanisms for an autonomous vehicle | |
| KR20200086764A (ko) | 차량 및 그 제어방법 | |
| US11180081B2 (en) | Rear-side alarm device and rear-side alarm method thereof | |
| JP2020132143A (ja) | 事故リスクを制限するための方法および制御機器 | |
| JP2017182768A (ja) | 衝突回避装置 | |
| US20200242941A1 (en) | Driver assistance system, and control method the same | |
| WO2019142312A1 (ja) | 車両制御装置、それを有する車両、および制御方法 | |
| US11195417B2 (en) | Vehicle and method for predicating collision | |
| CN114684120A (zh) | 一种基于障碍物运行轨迹预测的车辆控制方法 | |
| JP4196594B2 (ja) | 車両用制動制御装置 | |
| JP2005122272A (ja) | 車輌の走行経路予測制御装置 | |
| JP2005122274A (ja) | 車輌の走行態様判定制御装置 | |
| KR20210022812A (ko) | 차량 및 그 제어방법 | |
| JP7302433B2 (ja) | 車両制御装置 | |
| KR102548868B1 (ko) | 차량 및 그 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |