JP2017198633A - 車両制御システム、車両制御方法、および車両制御プログラム - Google Patents
車両制御システム、車両制御方法、および車両制御プログラム Download PDFInfo
- Publication number
- JP2017198633A JP2017198633A JP2016092029A JP2016092029A JP2017198633A JP 2017198633 A JP2017198633 A JP 2017198633A JP 2016092029 A JP2016092029 A JP 2016092029A JP 2016092029 A JP2016092029 A JP 2016092029A JP 2017198633 A JP2017198633 A JP 2017198633A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- route
- unit
- energy
- energy supply
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 14
- 230000008859 change Effects 0.000 claims description 43
- 238000003860 storage Methods 0.000 claims description 16
- 230000009471 action Effects 0.000 description 32
- 238000010586 diagram Methods 0.000 description 22
- 238000004891 communication Methods 0.000 description 19
- 238000001514 detection method Methods 0.000 description 18
- 238000011156 evaluation Methods 0.000 description 17
- 230000001133 acceleration Effects 0.000 description 14
- 238000012544 monitoring process Methods 0.000 description 7
- 238000002485 combustion reaction Methods 0.000 description 6
- 239000000446 fuel Substances 0.000 description 5
- 230000033228 biological regulation Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000005764 inhibitory process Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 239000005357 flat glass Substances 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000012790 confirmation Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 239000001257 hydrogen Substances 0.000 description 2
- 229910052739 hydrogen Inorganic materials 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 1
- 206010039203 Road traffic accident Diseases 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- 239000013256 coordination polymer Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005401 electroluminescence Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 230000009191 jumping Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0217—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with energy consumption, time reduction or distance reduction criteria
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0013—Planning or execution of driving tasks specially adapted for occupant comfort
- B60W60/00136—Planning or execution of driving tasks specially adapted for occupant comfort for intellectual activities, e.g. reading, gaming or working
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0023—Planning or execution of driving tasks in response to energy consumption
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3469—Fuel consumption; Energy use; Emission aspects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3476—Special cost functions, i.e. other than distance or default speed limit of road segments using point of interest [POI] information, e.g. a route passing visible POIs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B60W2420/408—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2422/00—Indexing codes relating to the special location or mounting of sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/406—Traffic density
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/40—High definition maps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle for navigation systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0644—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/081—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/24—Direction of travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2756/00—Output or target parameters relating to data
- B60W2756/10—Involving external transmission of data to or from the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
- G05D1/024—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/80—Technologies aiming to reduce greenhouse gasses emissions common to all road transportation technologies
- Y02T10/84—Data processing systems or methods, management, administration
Abstract
【課題】自動運転を好適に利用したエネルギー残量の管理を行うことが可能な車両制御システム、車両制御方法、および車両制御プログラムを提供することを目的の一つとする。【解決手段】設定された目的地まで走行するように、車両の速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行する自動運転制御部と、自動運転の計画を参照し、自動運転によって車両の現在位置から目的地までの誘導経路を車両が走行する際に、消費することが予測されるエネルギー量を導出する導出部と、導出部により導出されたエネルギー量に基づいて、誘導経路を変更する経路変更部とを備える車両制御システム。【選択図】図2
Description
本発明は、車両制御システム、車両制御方法、および車両制御プログラムに関する。
従来、地図情報に含まれる任意のリンクを走行する際の駆動エネルギーの消費量を算出し、車両の駆動エネルギーの残量と、駆動エネルギーの消費量とに基づいて、車両の駆動エネルギーの残量が所定のしきい値を下回らない経路のうち最少のコストを有する推奨経路を演算することを特徴とするナビゲーション装置が知られている(例えば、特許文献1参照)。
また、検索された到達可能なエネルギー補給所の位置を地図情報に重ねて表示手段に表示させて車両をエネルギー補給所に案内する案内手段とを備えた車両用ナビゲーションシステムにおいて、判定手段により目的地まで走行可能か走行不可能かを判定する際の判定基準を走行条件に応じて変更する基準変更手段を設けた車両用ナビゲーションシステムが知られている(例えば、特許文献2参照)。
近年、車両の加減速と操舵とのうち、少なくとも一方を自動的に制御する技術(以下、自動運転)について研究が進められている。しかしながら、従来の技術では、自動運転を好適に利用したエネルギー残量の管理がなされていなかった。
本発明は、このような事情を考慮してなされたものであり、自動運転を好適に利用したエネルギー残量の管理を行うことが可能な車両制御システム、車両制御方法、および車両制御プログラムを提供することを目的の一つとする。
請求項1記載の発明は、設定された目的地まで走行するように、車両の速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行する自動運転制御部と、前記自動運転の計画を参照し、前記自動運転によって前記車両の現在位置から前記目的地までの誘導経路を前記車両が走行する際に、消費することが予測されるエネルギー量を導出する導出部と、前記導出部により導出されたエネルギー量に基づいて、前記誘導経路を変更する経路変更部と、を備える車両制御システムである。
請求項2記載の発明は、請求項1に記載の車両制御システムにおいて、前記導出部により導出されたエネルギー量に基づいて、前記車両が前記目的地に到達するまでの間に、前記車両にエネルギーの補給が必要であるか否かを判定する第1の判定部と、前記第1の判定部により、前記車両にエネルギーの補給が必要であると判定された場合、前記誘導経路の周辺に前記エネルギーの補給施設が存在するか否かを判定する第2の判定部と、を更に備え、前記経路変更部が、前記第2の判定部により、前記誘導経路の周辺に前記エネルギーの補給施設が存在しないと判定された場合、前記誘導経路を変更するものである。
請求項3記載の発明は、請求項2に記載の車両制御システムにおいて、前記経路変更部が、前記第2の判定部により、前記誘導経路の周辺に前記エネルギーの補給施設が存在しないと判定された場合、前記誘導経路を、前記エネルギーの補給施設が存在する経路であって、前記目的地に至る経路に変更するものである。
請求項4記載の発明は、請求項3に記載の車両制御システムにおいて、地図情報を記憶する記憶部を更に備え、前記経路変更部が、前記記憶部に記憶された地図情報を参照して、前記地図情報が示す地図上において前記エネルギーの補給施設を抽出し、前記抽出した前記エネルギーの補給施設の中から、前記車両の現在位置から前記車両が最も早く到達可能なエネルギーの補給施設を選択し、前記誘導経路を、前記選択したエネルギーの補給施設が存在する経路に変更するものである。
請求項5記載の発明は、請求項2または3に記載の車両制御システムにおいて、前記車両の現在位置または設定された位置から、設定された目的地に至るまでの複数の経路のうち、所定の条件を満たす経路を前記誘導経路として導出する誘導経路導出部を更に備え、前記第2の判定部が、前記誘導経路導出部により前記誘導経路が導出される際に、前記所定の条件を満たさなかった誘導経路候補の周辺に前記エネルギーの補給施設が存在するか否かを判定し、前記経路変更部が、前記第2の判定部により、前記誘導経路候補の周辺に前記エネルギーの補給施設が存在すると判定された場合、前記誘導経路を、前記誘導経路候補に変更するものである。
請求項6記載の発明は、車載コンピュータが、設定された目的地まで走行するように、車両の速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行し、前記自動運転の計画を参照し、前記自動運転によって前記車両の現在位置から前記目的地までの誘導経路を前記車両が走行する際に、消費することが予測されるエネルギー量を導出し、前記導出したエネルギー量に基づいて、前記誘導経路を変更する、車両制御方法である。
請求項7記載の発明は、車載コンピュータに、設定された目的地まで走行するように、車両の速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行させ、前記自動運転の計画を参照させて、前記自動運転によって前記車両の現在位置から前記目的地までの誘導経路を前記車両が走行する際に、消費することが予測されるエネルギー量を導出させ、前記導出させたエネルギー量に基づいて、前記誘導経路を変更させる、車両制御プログラムである。
各請求項に記載の発明によれば、自動運転を好適に利用したエネルギー残量の管理を行うことができる。
以下、図面を参照し、本発明の車両制御システム、車両制御方法、および車両制御プログラムの実施形態について説明する。
<共通構成>
図1は、各実施形態の車両制御システム100が搭載される車両(以下、自車両Mと称する)の構成要素を示す図である。車両制御システム100が搭載される車両は、例えば、二輪や三輪、四輪等の自動車であり、ディーゼルエンジンやガソリンエンジン等の内燃機関を動力源とした自動車や、電動機を動力源とした電気自動車、内燃機関および電動機を兼ね備えたハイブリッド自動車等を含む。電気自動車は、例えば、二次電池、水素燃料電池、金属燃料電池、アルコール燃料電池等の電池により放電される電力を使用して駆動される。
図1は、各実施形態の車両制御システム100が搭載される車両(以下、自車両Mと称する)の構成要素を示す図である。車両制御システム100が搭載される車両は、例えば、二輪や三輪、四輪等の自動車であり、ディーゼルエンジンやガソリンエンジン等の内燃機関を動力源とした自動車や、電動機を動力源とした電気自動車、内燃機関および電動機を兼ね備えたハイブリッド自動車等を含む。電気自動車は、例えば、二次電池、水素燃料電池、金属燃料電池、アルコール燃料電池等の電池により放電される電力を使用して駆動される。
図1に示すように、自車両Mには、ファインダ20−1から20−7、レーダ30−1から30−6、およびカメラ40等のセンサと、ナビゲーション装置50と、車両制御システム100とが搭載される。
ファインダ20−1から20−7は、例えば、照射光に対する散乱光を測定し、対象までの距離を測定するLIDAR(Light Detection and Ranging、或いはLaser Imaging Detection and Ranging)である。例えば、ファインダ20−1は、フロントグリル等に取り付けられ、ファインダ20−2および20−3は、車体の側面やドアミラー、前照灯内部、側方灯付近等に取り付けられる。ファインダ20−4は、トランクリッド等に取り付けられ、ファインダ20−5および20−6は、車体の側面や尾灯内部等に取り付けられる。上述したファインダ20−1から20−6は、例えば、水平方向に関して150度程度の検出領域を有している。また、ファインダ20−7は、ルーフ等に取り付けられる。ファインダ20−7は、例えば、水平方向に関して360度の検出領域を有している。
レーダ30−1および30−4は、例えば、奥行き方向の検出領域が他のレーダよりも広い長距離ミリ波レーダである。また、レーダ30−2、30−3、30−5、30−6は、レーダ30−1および30−4よりも奥行き方向の検出領域が狭い中距離ミリ波レーダである。
以下、ファインダ20−1から20−7を特段区別しない場合は、単に「ファインダ20」と記載し、レーダ30−1から30−6を特段区別しない場合は、単に「レーダ30」と記載する。レーダ30は、例えば、FM−CW(Frequency Modulated Continuous Wave)方式によって物体を検出する。
カメラ40は、例えば、CCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)等の固体撮像素子を利用したデジタルカメラである。カメラ40は、車両前面に設けられたフロントウインドウ90aの上部やルームミラー裏面等に取り付けられる。カメラ40は、例えば、周期的に繰り返し自車両Mの前方を撮像する。カメラ40は、複数のカメラを含むステレオカメラであってもよい。
なお、図1に示す構成はあくまで一例であり、構成の一部が省略されてもよいし、更に別の構成が追加されてもよい。
<第1の実施形態>
図2は、第1の実施形態に係る車両制御システム100を中心とした機能構成図である。自車両Mには、ファインダ20、レーダ30、およびカメラ40などを含む検知デバイスDDと、ナビゲーション装置50と、通信装置55と、車両センサ60と、HMI(Human Machine Interface)70と、エネルギー残量計測部95と、車両制御システム100と、走行駆動力出力装置200と、ステアリング装置210と、ブレーキ装置220とが搭載される。これらの装置や機器は、CAN(Controller Area Network)通信線等の多重通信線やシリアル通信線、無線通信網等によって互いに接続される。なお、特許請求の範囲における車両制御システムは、「車両制御システム100」のみを指しているのではなく、車両制御システム100以外の構成(検知デバイスDDやHMI70など)を含んでもよい。
図2は、第1の実施形態に係る車両制御システム100を中心とした機能構成図である。自車両Mには、ファインダ20、レーダ30、およびカメラ40などを含む検知デバイスDDと、ナビゲーション装置50と、通信装置55と、車両センサ60と、HMI(Human Machine Interface)70と、エネルギー残量計測部95と、車両制御システム100と、走行駆動力出力装置200と、ステアリング装置210と、ブレーキ装置220とが搭載される。これらの装置や機器は、CAN(Controller Area Network)通信線等の多重通信線やシリアル通信線、無線通信網等によって互いに接続される。なお、特許請求の範囲における車両制御システムは、「車両制御システム100」のみを指しているのではなく、車両制御システム100以外の構成(検知デバイスDDやHMI70など)を含んでもよい。
ナビゲーション装置50は、GNSS(Global Navigation Satellite System)受信機や地図情報(ナビ地図)、ユーザインターフェースとして機能するタッチパネル式表示装置、スピーカ、マイク等を有する。ナビゲーション装置50は、GNSS受信機によって自車両Mの位置を特定し、その位置から車両乗員によって指定された目的地まで自車両Mを誘導するための経路(以下、誘導経路と称する)を導出する。また、ナビゲーション装置50は、自車両Mの位置の代わりに、車両乗員によって指定された位置(例えば最寄駅など)から目的地に至るまでの経路を誘導経路として導出してもよい。ナビゲーション装置50は、「誘導経路導出部」の一例である。
例えば、ナビゲーション装置50は、自車両Mの現在位置、または車両乗員により指定された任意の位置を誘導開始地点として扱い、この誘導開始地点から目的地である誘導終了地点に至るまでの複数の経路候補のそれぞれについて所定の評価条件に従って評価する。所定の評価条件は、走行時間や走行距離が最短であること、有料道路などを通過する際に要する費用が最安であること、高速道路であること、といった条件である。このような所定の評価条件は、車両乗員の操作によって任意に変更されてよい。例えば、ナビゲーション装置50は、上記評価条件の合致判定をする際、エネルギー補給施設の数、走行時間、走行距離、有料道路の有無および料金といった評価項目を用いて、複数の経路候補のそれぞれを評価する。エネルギー補給施設とは、例えば、ガソリンスタンドや充電スタンドなどのように、車両の動力源を駆動させるためエネルギーを補給することができる施設である。例えば、評価対象の経路候補から所定範囲内に存在するエネルギー補給施設は、その経路候補のエネルギー補給施設としてカウントされる。所定範囲内に存在するエネルギー補給施設とは、例えば、評価対象の経路候補が示す道路に沿接するエネルギー補給施設である。
そして、ナビゲーション装置50は、所定の評価条件に合致する経路候補のうち、全ての評価項目を考慮して総合的に最も評価の高い経路候補、または一部の評価項目について最も評価の高い経路候補を誘導経路として導出する。なお、評価条件には、車両乗員による操作によって重みが付けられてよい。例えば、走行時間が短くなる経路候補ほど誘導経路としてより優先的に導出されるように重みが付けられてもよいし、エネルギー補給施設の数が多い経路候補ほど誘導経路としてより優先的に導出されるように重みが付けられてもよい。
ナビゲーション装置50は、導出した誘導経路を示す情報を車両制御システム100に出力する。なお、誘導経路を示す情報には、誘導経路として選択されなかったものの、例えば2番目や3番目に評価が高かった経路候補を示す情報が含まれてもよい。誘導経路を示す情報は、後述する車両制御システム100の記憶部180に誘導経路情報182として記憶される。
また、ナビゲーション装置50は、例えば、車両センサ60の出力を利用したINS(Inertial Navigation System)によって自車両Mの位置を特定および補完してもよい。また、ナビゲーション装置50は、車両制御システム100が手動運転モードを実行している際に、目的地に至る誘導経路について音声やナビ表示によって案内を行ってよい。なお、自車両Mの位置を特定するための構成や経路候補を評価するための構成は、ナビゲーション装置50とは独立して設けられてもよい。また、ナビゲーション装置50は、例えば、ユーザの保有するスマートフォンやタブレット端末等の端末装置の機能によって実現されてもよい。この場合、端末装置と車両制御システム100との間で、無線または有線による通信によって情報の送受信が行われる。
通信装置55は、例えば、セルラー網やWi−Fi網、Bluetooth(登録商標)、DSRC(Dedicated Short Range Communication)などを利用した無線通信を行う。例えば、通信装置55は、VICS(登録商標)(Vehicle Information and Communication System)などの道路の交通状況を監視するシステムの情報提供用サーバと無線通信を行い、自車両Mが走行している道路や走行予定の道路の交通状況を示す情報(以下、交通事情情報と称する)を取得する。交通事情情報には、前方の渋滞情報、渋滞地点の所要時間、事故・故障車・工事情報、速度規制・車線規制情報、駐車場の位置、駐車場・サービスエリア・パーキングエリアの満車・空車情報などの情報が含まれる。また、通信装置55は、道路の側帯などに設けられた無線ビーコンと通信を行ったり、自車両Mの周囲を走行する他車両と車車間通信を行ったりすることで、上記交通事情情報を取得してもよい。また、通信装置55は、エネルギー補給施設ごとにエネルギーの価格を調査し、調査した情報を提供する情報提供用サーバと通信を行って、エネルギーの価格に関する情報を取得してもよい。
車両センサ60は、車速を検出する車速センサ、加速度を検出する加速度センサ、鉛直軸回りの角速度を検出するヨーレートセンサ、自車両Mの向きを検出する方位センサ等を含む。
図3は、HMI70の構成図である。HMI70は、例えば、運転操作系の構成と、非運転操作系の構成とを備える。これらの境界は明確なものでは無く、運転操作系の構成が非運転操作系の機能を備えること(或いはその逆)があってもよい。
HMI70は、運転操作系の構成として、例えば、アクセルペダル71、アクセル開度センサ72およびアクセルペダル反力出力装置73と、ブレーキペダル74およびブレーキ踏量センサ(或いはマスター圧センサなど)75と、シフトレバー76およびシフト位置センサ77と、ステアリングホイール78、ステアリング操舵角センサ79およびステアリングトルクセンサ80と、その他運転操作デバイス81とを含む。
アクセルペダル71は、車両乗員による加速指示(或いは戻し操作による減速指示)を受け付けるための操作子である。アクセル開度センサ72は、アクセルペダル71の踏み込み量を検出し、踏み込み量を示すアクセル開度信号を車両制御システム100に出力する。なお、車両制御システム100に出力するのに代えて、走行駆動力出力装置200、ステアリング装置210、またはブレーキ装置220に直接出力することがあってもよい。以下に説明する他の運転操作系の構成についても同様である。アクセルペダル反力出力装置73は、例えば車両制御システム100からの指示に応じて、アクセルペダル71に対して操作方向と反対向きの力(操作反力)を出力する。
ブレーキペダル74は、車両乗員による減速指示を受け付けるための操作子である。ブレーキ踏量センサ75は、ブレーキペダル74の踏み込み量(或いは踏み込み力)を検出し、検出結果を示すブレーキ信号を車両制御システム100に出力する。
シフトレバー76は、車両乗員によるシフト段の変更指示を受け付けるための操作子である。シフト位置センサ77は、車両乗員により指示されたシフト段を検出し、検出結果を示すシフト位置信号を車両制御システム100に出力する。
ステアリングホイール78は、車両乗員による旋回指示を受け付けるための操作子である。ステアリング操舵角センサ79は、ステアリングホイール78の操作角を検出し、検出結果を示すステアリング操舵角信号を車両制御システム100に出力する。ステアリングトルクセンサ80は、ステアリングホイール78に加えられたトルクを検出し、検出結果を示すステアリングトルク信号を車両制御システム100に出力する。
その他運転操作デバイス81は、例えば、ジョイスティック、ボタン、ダイヤルスイッチ、GUI(Graphical User Interface)スイッチなどである。その他運転操作デバイス81は、加速指示、減速指示、旋回指示などを受け付け、車両制御システム100に出力する。
HMI70は、非運転操作系の構成として、例えば、表示装置82、スピーカ83、接触操作検出装置84およびコンテンツ再生装置85と、各種操作スイッチ86と、シート88およびシート駆動装置89と、ウインドウガラス90およびウインドウ駆動装置91と、車室内カメラ92と、空調装置93とを含む。HMI70の非運転操作系の構成は、「操作部」の一例である。
表示装置82は、例えば、インストルメントパネルの各部、助手席や後部座席に対向する任意の箇所などに取り付けられる、LCD(Liquid Crystal Display)や有機EL(Electroluminescence)表示装置などである。また、表示装置82は、フロントウインドシールドやその他のウインドウに画像を投影するHUD(Head Up Display)であってもよい。スピーカ83は、音声を出力する。接触操作検出装置84は、表示装置82がタッチパネルである場合に、表示装置82の表示画面における接触位置(タッチ位置)を検出して、車両制御システム100に出力する。なお、表示装置82がタッチパネルでない場合、接触操作検出装置84は省略されてよい。
コンテンツ再生装置85は、例えば、DVD(Digital Versatile Disc)再生装置、CD(Compact Disc)再生装置、テレビジョン受信機、各種案内画像の生成装置などを含む。表示装置82、スピーカ83、接触操作検出装置84およびコンテンツ再生装置85は、一部または全部がナビゲーション装置50と共通する構成であってもよい。
各種操作スイッチ86は、車室内の任意の箇所に配置される。各種操作スイッチ86には、自動運転の開始(或いは将来の開始)および停止を指示する自動運転切替スイッチ87を含む。自動運転切替スイッチ87は、GUI(Graphical User Interface)スイッチ、機械式スイッチのいずれであってもよい。また、各種操作スイッチ86は、シート駆動装置89やウインドウ駆動装置91を駆動するためのスイッチを含んでもよい。
シート88は、車両乗員が着座するシートである。シート駆動装置89は、シート88のリクライニング角、前後方向位置、ヨー角などを自在に駆動する。ウインドウガラス90は、例えば各ドアに設けられる。ウインドウ駆動装置91は、ウインドウガラス90を開閉駆動する。
車室内カメラ92は、CCDやCMOS等の固体撮像素子を利用したデジタルカメラである。車室内カメラ92は、バックミラーやステアリングボス部、インストルメントパネルなど、運転操作を行う車両乗員の少なくとも頭部を撮像可能な位置に取り付けられる。カメラ40は、例えば、周期的に繰り返し車両乗員を撮像する。空調装置93は、車室内の温度や湿度、風量などを調整する。
エネルギー残量計測部95は、自車両Mの動力源を駆動させるためのエネルギーの残量を計測する。例えば、エネルギー残量計測部95は、自車両Mが内燃機関を動力源とした自動車である場合、内燃機関において燃焼させるガソリンなどの液体燃料の残量を計測する。また、エネルギー残量計測部95は、例えば、自車両Mが電動機を動力源とした自動車である場合、電動機を駆動する電力を出力する電池の残量を計測する。また、エネルギー残量計測部95は、自車両Mが内燃機関および電動機を兼ね備えたハイブリッド自動車である場合、液体燃料および電池の双方の残量を計測してよい。エネルギー残量計測部95は、計測したエネルギー残量を示す情報を車両制御システム100に出力する。
車両制御システム100の説明に先立って、走行駆動力出力装置200、ステアリング装置210、およびブレーキ装置220について説明する。
走行駆動力出力装置200は、車両が走行するための走行駆動力(トルク)を駆動輪に出力する。走行駆動力出力装置200は、例えば、自車両Mが内燃機関を動力源とした自動車である場合、エンジン、変速機、およびエンジンを制御するエンジンECU(Electronic Control Unit)を備え、自車両Mが電動機を動力源とした電気自動車である場合、走行用モータおよび走行用モータを制御するモータECUを備え、自車両Mがハイブリッド自動車である場合、エンジン、変速機、およびエンジンECUと走行用モータおよびモータECUとを備える。走行駆動力出力装置200がエンジンのみを含む場合、エンジンECUは、後述する走行制御部160から入力される情報に従って、エンジンのスロットル開度やシフト段等を調整する。走行駆動力出力装置200が走行用モータのみを含む場合、モータECUは、走行制御部160から入力される情報に従って、走行用モータに与えるPWM信号のデューティ比を調整する。走行駆動力出力装置200がエンジンおよび走行用モータを含む場合、エンジンECUおよびモータECUは、走行制御部160から入力される情報に従って、互いに協調して走行駆動力を制御する。
ステアリング装置210は、例えば、ステアリングECUと、電動モータとを備える。電動モータは、例えば、ラックアンドピニオン機構に力を作用させて転舵輪の向きを変更する。ステアリングECUは、車両制御システム100から入力される情報、或いは入力されるステアリング操舵角またはステアリングトルクの情報に従って電動モータを駆動し、転舵輪の向きを変更させる。
ブレーキ装置220は、例えば、ブレーキキャリパーと、ブレーキキャリパーに油圧を伝達するシリンダと、シリンダに油圧を発生させる電動モータと、制動制御部とを備える電動サーボブレーキ装置である。電動サーボブレーキ装置の制動制御部は、走行制御部160から入力される情報に従って電動モータを制御し、制動操作に応じたブレーキトルクが各車輪に出力されるようにする。電動サーボブレーキ装置は、ブレーキペダルの操作によって発生させた油圧を、マスターシリンダを介してシリンダに伝達する機構をバックアップとして備えてよい。なお、ブレーキ装置220は、上記説明した電動サーボブレーキ装置に限らず、電子制御式油圧ブレーキ装置であってもよい。電子制御式油圧ブレーキ装置は、走行制御部160から入力される情報に従ってアクチュエータを制御して、マスターシリンダの油圧をシリンダに伝達する。また、ブレーキ装置220は、走行駆動力出力装置200に含まれ得る走行用モータによる回生ブレーキを含んでもよい。
[車両制御システム]
以下、車両制御システム100について説明する。車両制御システム100は、例えば、一以上のプロセッサまたは同等の機能を有するハードウェアにより実現される。車両制御システム100は、CPU(Central Processing Unit)などのプロセッサ、記憶装置、および通信インターフェースが内部バスによって接続されたECU(Electronic Control Unit)、或いはMPU(Micro-Processing Unit)などが組み合わされた構成であってよい。
以下、車両制御システム100について説明する。車両制御システム100は、例えば、一以上のプロセッサまたは同等の機能を有するハードウェアにより実現される。車両制御システム100は、CPU(Central Processing Unit)などのプロセッサ、記憶装置、および通信インターフェースが内部バスによって接続されたECU(Electronic Control Unit)、或いはMPU(Micro-Processing Unit)などが組み合わされた構成であってよい。
図2に戻り、車両制御システム100は、例えば、目標車線決定部110と、自動運転制御部120と、走行制御部160と、HMI制御部170と、記憶部180と、エネルギー監視部190とを備える。自動運転制御部120は、例えば、自動運転モード制御部130と、自車位置認識部140と、外界認識部142と、行動計画生成部144と、軌道生成部146と、切替制御部150とを備える。
目標車線決定部110、自動運転制御部120の各部、および走行制御部160のうち一部または全部は、プロセッサがプログラム(ソフトウェア)を実行することにより実現される。また、これらのうち一部または全部は、LSI(Large Scale Integration)やASIC(Application Specific Integrated Circuit)等のハードウェアによって実現されてもよいし、ソフトウェアとハードウェアの組み合わせによって実現されてもよい。
記憶部180には、例えば、高精度地図情報181、誘導経路情報182、目標車線情報183、行動計画情報184、モード別操作可否情報185などの情報が格納される。記憶部180は、ROM(Read Only Memory)やRAM(Random Access Memory)、HDD(Hard Disk Drive)、フラッシュメモリ等で実現される。プロセッサが実行するプログラムは、予め記憶部180に格納されていてもよいし、車載インターネット設備等を介して外部装置からダウンロードされてもよい。また、プログラムは、そのプログラムを格納した可搬型記憶媒体が図示しないドライブ装置に装着されることで記憶部180にインストールされてもよい。また、車両制御システム100は、複数のコンピュータ装置によって分散化されたものであってもよい。
目標車線決定部110は、例えば、MPUにより実現される。目標車線決定部110は、ナビゲーション装置50から出力された誘導経路情報182を参照して、誘導経路を複数のブロックに分割する。目標車線決定部110は、例えば、車両進行方向に関して100[m]毎に誘導経路を分割する。そして、目標車線決定部110は、高精度地図情報181を参照して、ブロックごとに分割した誘導経路内において、自車両Mを走行させる目標車線を決定する。目標車線決定部110は、例えば、左から何番目の車線を走行するといった決定を行う。目標車線決定部110は、例えば、誘導経路において分岐箇所や合流箇所などが存在する場合、自車両Mが、分岐先に進行するための合理的な経路を走行できるように、目標車線を決定する。目標車線決定部110により決定された目標車線は、目標車線情報183として記憶部180に記憶される。
目標車線決定部110は、誘導経路情報182を参照して、誘導経路以外の他の経路についても目標車線を決定してよい。この場合、目標車線情報183には、誘導経路に対して決定された目標車線と、誘導経路以外の他の経路に対して決定された目標車線との双方に関する情報が含まれてよい。
高精度地図情報181は、ナビゲーション装置50が有するナビ地図よりも高精度な地図情報である。高精度地図情報181は、例えば、車線の中央の情報あるいは車線の境界の情報等を含んでいる。また、高精度地図情報181には、道路情報、交通規制情報、住所情報(住所・郵便番号)、施設情報、電話番号情報などが含まれてよい。道路情報には、高速道路、有料道路、国道、都道府県道といった道路の種別を表す情報や、道路の車線数、各車線の幅員、道路の勾配、道路の位置(経度、緯度、高さを含む3次元座標)、車線のカーブの曲率、車線の合流および分岐ポイントの位置、道路に設けられた標識等の情報が含まれる。交通規制情報には、工事や交通事故、渋滞等によって車線が封鎖されているといった情報が含まれる。施設情報には、高精度地図上に存在する施設が上述したエネルギー補給施設に該当するかどうかを示す情報や、ガソリン給油、電池充電、水素充填といったようにエネルギー補給施設がどういった種類のエネルギーを提供可能であるのかを示す情報などが含まれてよい。
自動運転モード制御部130は、自動運転制御部120が実行する自動運転モードを決定する。本実施形態における自動運転のモードには、以下のモードが含まれる。なお、以下はあくまで一例であり、自動運転のモード数は任意に決定されてよい。
[モードA]
モードAは、最も自動運転の度合が高いモードである。モードAが実施されている場合、複雑な合流制御など、全ての車両制御が自動的に行われるため、車両乗員は自車両Mの周辺や状態を監視する必要が無い。
[モードB]
モードBは、モードAの次に自動運転の度合が高いモードである。モードBが実施されている場合、原則として全ての車両制御が自動的に行われるが、場面に応じて自車両Mの運転操作が車両乗員に委ねられる。このため、車両乗員は自車両Mの周辺や状態を監視している必要がある。
[モードC]
モードCは、モードBの次に自動運転の度合が高いモードである。モードCが実施されている場合、車両乗員は、場面に応じた確認操作をHMI70に対して行う必要がある。モードCでは、例えば、車線変更のタイミングが車両乗員に通知され、車両乗員がHMI70に対して車線変更を指示する操作を行った場合に、自動的な車線変更が行われる。このため、車両乗員は自車両Mの周辺や状態を監視している必要がある。
[モードA]
モードAは、最も自動運転の度合が高いモードである。モードAが実施されている場合、複雑な合流制御など、全ての車両制御が自動的に行われるため、車両乗員は自車両Mの周辺や状態を監視する必要が無い。
[モードB]
モードBは、モードAの次に自動運転の度合が高いモードである。モードBが実施されている場合、原則として全ての車両制御が自動的に行われるが、場面に応じて自車両Mの運転操作が車両乗員に委ねられる。このため、車両乗員は自車両Mの周辺や状態を監視している必要がある。
[モードC]
モードCは、モードBの次に自動運転の度合が高いモードである。モードCが実施されている場合、車両乗員は、場面に応じた確認操作をHMI70に対して行う必要がある。モードCでは、例えば、車線変更のタイミングが車両乗員に通知され、車両乗員がHMI70に対して車線変更を指示する操作を行った場合に、自動的な車線変更が行われる。このため、車両乗員は自車両Mの周辺や状態を監視している必要がある。
自動運転モード制御部130は、HMI70に対する車両乗員の操作、行動計画生成部144により決定されたイベント、軌道生成部146により決定された走行態様などに基づいて、自動運転のモードを決定する。自動運転のモードは、HMI制御部170に通知される。また、自動運転のモードには、自車両Mの検知デバイスDDの性能等に応じた限界が設定されてもよい。例えば、検知デバイスDDの性能が低い場合には、モードAは実施されないものとしてよい。いずれのモードにおいても、HMI70における運転操作系の構成に対する操作によって、手動運転モードに切り替えること(オーバーライド)は可能である。
自動運転制御部120の自車位置認識部140は、記憶部180に格納された高精度地図情報181と、ファインダ20、レーダ30、カメラ40、ナビゲーション装置50、または車両センサ60から入力される情報とに基づいて、自車両Mが走行している車線(走行車線)、および、走行車線に対する自車両Mの相対位置を認識する。
自車位置認識部140は、例えば、高精度地図情報181から認識される道路区画線のパターン(例えば実線と破線の配列)と、カメラ40によって撮像された画像から認識される自車両Mの周辺の道路区画線のパターンとを比較することで、走行車線を認識する。この認識において、ナビゲーション装置50から取得される自車両Mの位置やINSによる処理結果が加味されてもよい。
図4は、自車位置認識部140により走行車線L1に対する自車両Mの相対位置が認識される様子を示す図である。自車位置認識部140は、例えば、自車両Mの基準点(例えば重心)の走行車線中央CLからの乖離OS、および自車両Mの進行方向の走行車線中央CLを連ねた線に対してなす角度θを、走行車線L1に対する自車両Mの相対位置として認識する。なお、これに代えて、自車位置認識部140は、自車線L1のいずれかの側端部に対する自車両Mの基準点の位置などを、走行車線に対する自車両Mの相対位置として認識してもよい。自車位置認識部140により認識される自車両Mの相対位置は、目標車線決定部110に提供される。
外界認識部142は、ファインダ20、レーダ30、カメラ40等から入力される情報に基づいて、周辺車両の位置、および速度、加速度等の状態を認識する。周辺車両とは、例えば、自車両Mの周辺を走行する車両であって、自車両Mと同じ方向に走行する車両である。周辺車両の位置は、他車両の重心やコーナー等の代表点で表されてもよいし、他車両の輪郭で表現された領域で表されてもよい。周辺車両の「状態」とは、上記各種機器の情報に基づいて把握される、周辺車両の加速度、車線変更をしているか否か(あるいは車線変更をしようとしているか否か)を含んでもよい。また、外界認識部142は、周辺車両に加えて、ガードレールや電柱、駐車車両、歩行者その他の物体の位置を認識してもよい。
行動計画生成部144は、誘導経路情報182を参照して、誘導経路上に自動運転のスタート地点、および/または自動運転の目的地を設定する。自動運転のスタート地点は、自車両Mの現在位置であってもよいし、自動運転を指示する操作がなされた地点でもよい。行動計画生成部144は、そのスタート地点と自動運転の目的地との間の区間において、行動計画を生成する。なお、これに限らず、行動計画生成部144は、任意の区間について行動計画を生成してもよい。例えば、行動計画生成部144は、誘導経路以外の他の経路において、自動運転のスタート地点、および/または自動運転の目的地を設定し、行動計画を生成してよい。
行動計画は、例えば、順次実行される複数のイベントで構成される。イベントには、例えば、自車両Mを減速させる減速イベントや、自車両Mを加速させる加速イベント、走行車線を逸脱しないように自車両Mを走行させるレーンキープイベント、走行車線を変更させる車線変更イベント、自車両Mに前走車両を追い越させる追い越しイベント、分岐ポイントにおいて所望の車線に変更させたり、現在の走行車線を逸脱しないように自車両Mを走行させたりする分岐イベント、本線に合流するための合流車線において自車両Mを加減速させ、走行車線を変更させる合流イベント、自動運転の開始地点で手動運転モードから自動運転モードに移行させたり、自動運転の終了予定地点で自動運転モードから手動運転モードに移行させたりするハンドオーバイベント等が含まれる。行動計画生成部144は、目標車線決定部110により決定された目標車線が切り替わる箇所において、車線変更イベント、分岐イベント、または合流イベントを設定する。行動計画生成部144によって生成された行動計画を示す情報は、行動計画情報184として記憶部180に格納される。
図5は、ある区間について生成された行動計画の一例を示す図である。図示するように、行動計画生成部144は、目標車線情報183が示す目標車線上を自車両Mが走行するために必要な行動計画を生成する。なお、行動計画生成部144は、自車両Mの状況変化に応じて、目標車線情報183に拘わらず、動的に行動計画を変更してもよい。例えば、行動計画生成部144は、車両走行中に外界認識部142によって認識された周辺車両の速度が閾値を超えたり、自車線に隣接する車線を走行する周辺車両の移動方向が自車線方向に向いたりした場合に、自車両Mが走行予定の運転区間に設定されたイベントを変更する。例えば、レーンキープイベントの後に車線変更イベントが実行されるようにイベントが設定されている場合において、外界認識部142の認識結果によって当該レーンキープイベント中に車線変更先の車線後方から車両が閾値以上の速度で進行してきたことが判明した場合、行動計画生成部144は、レーンキープイベントの次のイベントを、車線変更イベントから減速イベントやレーンキープイベント等に変更してよい。この結果、車両制御システム100は、外界の状態に変化が生じた場合においても、安全に自車両Mを自動走行させることができる。
図6は、第1の実施形態における軌道生成部146の構成の一例を示す図である。軌道生成部146は、例えば、走行態様決定部146Aと、軌道候補生成部146Bと、評価・選択部146Cとを備える。
走行態様決定部146Aは、例えば、レーンキープイベントを実施する際に、定速走行、追従走行、低速追従走行、減速走行、カーブ走行、障害物回避走行などのうちいずれかの走行態様を決定する。この場合、走行態様決定部146Aは、自車両Mの前方に他車両が存在しない場合に、走行態様を定速走行に決定する。また、走行態様決定部146Aは、前走車両に対して追従走行するような場合に、走行態様を追従走行に決定する。また、走行態様決定部146Aは、渋滞場面などにおいて、走行態様を低速追従走行に決定する。また、走行態様決定部146Aは、外界認識部142により前走車両の減速が認識された場合や、停車や駐車などのイベントを実施する場合に、走行態様を減速走行に決定する。また、走行態様決定部146Aは、外界認識部142により自車両Mがカーブ路に差し掛かったことが認識された場合に、走行態様をカーブ走行に決定する。また、走行態様決定部146Aは、外界認識部142により自車両Mの前方に障害物が認識された場合に、走行態様を障害物回避走行に決定する。また、走行態様決定部146Aは、車線変更イベント、追い越しイベント、分岐イベント、合流イベント、ハンドオーバイベントなどを実施する場合に、それぞれのイベントに応じた走行態様を決定する。
軌道候補生成部146Bは、走行態様決定部146Aにより決定された走行態様に基づいて、軌道の候補を生成する。図7は、軌道候補生成部146Bにより生成される軌道の候補の一例を示す図である。図7は、自車両Mが車線L1から車線L2に車線変更する場合に生成される軌道の候補を示している。
軌道候補生成部146Bは、図7に示すような軌道を、例えば、将来の所定時間ごとに、自車両Mの基準位置(例えば重心や後輪軸中心)が到達すべき目標位置(軌道点K)の集まりとして決定する。図8は、軌道候補生成部146Bにより生成される軌道の候補を軌道点Kで表現した図である。軌道点Kの間隔が広いほど、自車両Mの速度は速くなり、軌道点Kの間隔が狭いほど、自車両Mの速度は遅くなる。従って、軌道候補生成部146Bは、加速したい場合には軌道点Kの間隔を徐々に広くし、減速したい場合は軌道点の間隔を徐々に狭くする。
このように、軌道点Kは速度成分を含むものであるため、軌道候補生成部146Bは、軌道点Kのそれぞれに対して目標速度を与える必要がある。目標速度は、走行態様決定部146Aにより決定された走行態様に応じて決定される。
ここで、車線変更(分岐を含む)を行う場合の目標速度の決定手法について説明する。軌道候補生成部146Bは、まず、車線変更ターゲット位置(或いは合流ターゲット位置)を設定する。車線変更ターゲット位置は、周辺車両との相対位置として設定されるものであり、「どの周辺車両の間に車線変更するか」を決定するものである。軌道候補生成部146Bは、車線変更ターゲット位置を基準として3台の周辺車両に着目し、車線変更を行う場合の目標速度を決定する。図9は、車線変更ターゲット位置TAを示す図である。図中、L1は自車線を表し、L2は隣接車線を表している。ここで、自車両Mと同じ車線で、自車両Mの直前を走行する周辺車両を前走車両mA、車線変更ターゲット位置TAの直前を走行する周辺車両を前方基準車両mB、車線変更ターゲット位置TAの直後を走行する周辺車両を後方基準車両mCと定義する。自車両Mは、車線変更ターゲット位置TAの側方まで移動するために加減速を行う必要があるが、この際に前走車両mAに追いついてしまうことを回避しなければならない。このため、軌道候補生成部146Bは、3台の周辺車両の将来の状態を予測し、各周辺車両と干渉しないように目標速度を決定する。
図10は、3台の周辺車両の速度を一定と仮定した場合の速度生成モデルを示す図である。図中、mA、mBおよびmCから延出する直線は、それぞれの周辺車両が定速走行したと仮定した場合の進行方向における変位を示している。自車両Mは、車線変更が完了するポイントCPにおいて、前方基準車両mBと後方基準車両mCとの間にあり、且つ、それ以前において前走車両mAよりも後ろにいなければならない。このような制約の下、軌道候補生成部146Bは、車線変更が完了するまでの目標速度の時系列パターンを、複数導出する。そして、目標速度の時系列パターンをスプライン曲線等のモデルに適用することで、図8に示すような軌道の候補を複数導出する。なお、3台の周辺車両の運動パターンは、図10に示すような定速度に限らず、定加速度、定ジャーク(躍度)を前提として予測されてもよい。
評価・選択部146Cは、軌道候補生成部146Bにより生成された軌道の候補に対して、例えば、計画性と安全性の二つの観点で評価を行い、走行制御部160に出力する軌道を選択する。計画性の観点からは、例えば、既に生成されたプラン(例えば行動計画)に対する追従性が高く、軌道の全長が短い場合に軌道が高く評価される。例えば、右方向に車線変更することが望まれる場合に、一旦左方向に車線変更して戻るといった軌道は、低い評価となる。安全性の観点からは、例えば、それぞれの軌道点において、自車両Mと物体(周辺車両等)との距離が遠く、加減速度や操舵角の変化量などが小さいほど高く評価される。
切替制御部150は、自動運転切替スイッチ87から入力される信号に基づいて自動運転モードと手動運転モードとを相互に切り替える。また、切替制御部150は、HMI70における運転操作系の構成に対する加速、減速または操舵を指示する操作に基づいて、自動運転モードから手動運転モードに切り替える。例えば、切替制御部150は、HMI70における運転操作系の構成から入力された信号の示す操作量が閾値を超えた状態が、基準時間以上継続した場合に、自動運転モードから手動運転モードに切り替える(オーバーライド)。また、切替制御部150は、オーバーライドによる手動運転モードへの切り替えの後、所定時間の間、HMI70における運転操作系の構成に対する操作が検出されなかった場合に、自動運転モードに復帰させてもよい。
走行制御部160は、軌道生成部146によって生成された軌道を、予定の時刻通りに自車両Mが通過するように、走行駆動力出力装置200、ステアリング装置210、およびブレーキ装置220を制御する。
図11は、HMI制御部170の構成の一例を示す図である。HMI制御部170は、例えば、モード別制御部170Aと、情報提供部170Bとを備える。
モード別制御部170Aは、自動運転制御部120により自動運転のモードの情報が通知されると、モード別操作可否情報185を参照して、自動運転のモードの種別に応じてHMI70を制御する。
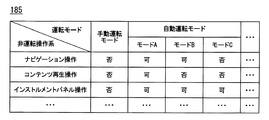
図12は、モード別操作可否情報185の一例を示す図である。図12に示すモード別操作可否情報185は、運転モードの項目として「手動運転モード」、「自動運転モード」とを有する。また、「自動運転モード」として、上述した「モードA」、「モードB」、および「モードC」等を有する。また、モード別操作可否情報185は、非運転操作系の項目として、ナビゲーション装置50に対する操作である「ナビゲーション操作」、コンテンツ再生装置85に対する操作である「コンテンツ再生操作」、表示装置82に対する操作である「インストルメントパネル操作」等を有する。図12に示すモード別操作可否情報185の例では、上述した運転モードごとに非運転操作系に対する車両乗員の操作の可否が設定されているが、対象のインターフェース装置は、これに限定されるものではない。
モード別制御部170Aは、自動運転制御部120から取得したモードの情報に基づいてモード別操作可否情報185を参照することで、使用が許可される装置(ナビゲーション装置50およびHMI70の一部または全部)と、使用が許可されない装置とを判定する。また、モード別制御部170Aは、判定結果に基づいて、非運転操作系のHMI70、またはナビゲーション装置50に対する車両乗員からの操作の受け付けの可否を制御する。
例えば、車両制御システム100が実行する運転モードが手動運転モードの場合、車両乗員は、HMI70の運転操作系の構成(例えば、アクセルペダル71、ブレーキペダル74、シフトレバー76、およびステアリングホイール78等)を操作する。また、車両制御システム100が実行する運転モードが自動運転モードのモードB、モードC等である場合、車両乗員には、自車両Mの周辺監視義務が課される。このような場合、車両乗員の運転以外の行動(例えばHMI70の操作等)により注意が散漫になること(ドライバーディストラクション)を防止するため、モード別制御部170Aは、HMI70の非運転操作系の一部または全部に対する操作を受け付けないように制御を行う。この際、モード別制御部170Aは、自車両Mの周辺監視を行わせるために、外界認識部142により認識された自車両Mの周辺車両の存在やその周辺車両の状態を、表示装置82に画像などで表示させると共に、自車両Mの走行時の場面に応じた確認操作をHMI70に受け付けさせてよい。
また、モード別制御部170Aは、運転モードが自動運転のモードAである場合、ドライバーディストラクションの規制を緩和し、操作を受け付けていなかった非運転操作系に対する車両乗員の操作を受け付ける制御を行ってよい。例えば、モード別制御部170Aは、表示装置82に映像を表示させたり、スピーカ83に音声を出力させたり、コンテンツ再生装置85にDVDなどからコンテンツを再生させたりする。なお、コンテンツ再生装置85が再生するコンテンツには、DVDなどに格納されたコンテンツの他、例えば、テレビ番組等の娯楽、エンターテイメントに関する各種コンテンツが含まれてよい。また、図11に示す「コンテンツ再生操作」は、このような娯楽、エンターテイメントに関するコンテンツ操作を意味するものであってよい。
情報提供部170Bは、後述するエネルギー監視部190による判定結果に基づいて、HMI70の表示装置82やスピーカ83等を用いて、種々の情報を車両乗員に報知する。報知する情報の詳細については後述する。
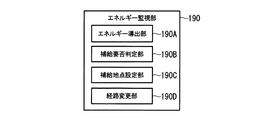
図13は、エネルギー監視部190の構成の一例を示す図である。エネルギー監視部190は、例えば、エネルギー導出部190Aと、補給要否判定部190Bと、補給地点判定部190Cと、経路変更部180Dとを備える。補給要否判定部190Bは、「第1の判定部」の一例であり、補給地点判定部190Cは、「第2の判定部」の一例である。
エネルギー導出部190Aは、ナビゲーション装置50により出力された誘導経路情報182に基づいて、自車両Mが目的地に到達するまでに消費することが予測される将来のエネルギー量(以下、消費予測エネルギー量と称する)を導出する。例えば、エネルギー導出部190Aは、行動計画情報184を参照して、誘導経路における運転区間ごとのイベントの種類に基づいて、運転区間ごとに消費予測エネルギー量を導出する。例えば、レーンキープイベントが計画された運転区間では、加減速制御や操舵制御が行われる頻度が小さくなるため、他のイベントと比べて消費予測エネルギー量が少なくなりやすい。一方、車線変更イベントや追い越しイベントなどが計画された運転区間では、周辺車両の速度に合わせて車線変更する必要があるため、加減速制御や操舵制御を頻繁に行うことになる。従って、当該運転区間では、消費予測エネルギー量が多くなりやすい。
また、エネルギー導出部190Aは、誘導経路以外の他の経路における運転区間ごとのイベントの種類に基づいて、他の経路の運転区間ごとに消費予測エネルギー量を導出してよい。
また、エネルギー導出部190Aは、現在位置から目的地に到達するまでの間、誘導経路が示す道路の法定速度や平均速度などの基準となる速度と同じ速度で自車両Mが走行するものと仮定し、この間に自車両Mが消費するエネルギー量を消費予測エネルギー量として導出してもよい。また、エネルギー導出部190Aは、例えば、過去に消費したエネルギー量を単位時間や単位距離などで除算した指標を用いて、将来の消費予測エネルギー量を導出してもよい。また、エネルギー導出部190Aは、通信装置55によって取得された交通事情情報を参照して、誘導経路が示す道路において渋滞や事故などが生じていることが判明した場合には、渋滞や事故などが解消されるまでの時間等を考慮して、消費予測エネルギー量を導出してもよい。
補給要否判定部190Bは、エネルギー残量計測部95により計測されたエネルギー残量と、導出した消費予測エネルギー量とに基づいて、自車両Mが目的地に到達するまでの間にエネルギーを補給する必要があるか否かを判定する。例えば、補給要否判定部190Bは、エネルギー残量と消費予測エネルギー量とが同程度の場合、或いはエネルギー残量に比して消費予測エネルギー量の方が大きい場合、エネルギーを補給する必要があると判定する。以下、エネルギー残量と消費予測エネルギー量とが同程度になる時点、或いはエネルギー残量に比して消費予測エネルギー量の方が大きくなる時点を、走行限界地点PLIMと称して説明する。補給要否判定部190Bは、エネルギーを補給する必要があると判定した場合、この判定結果を情報提供部170Bに通知する。これを受けて、情報提供部170Bは、HMI70の表示装置82やスピーカ83等を用いて、所定の情報を車両乗員に報知する。所定の情報とは、例えばエネルギーを補給する必要があることを車両乗員に知らせるための情報である。
図14は、エネルギーの補給が必要な場面で表示される画面の一例を示す図である。図示のように、例えば、表示装置82の画面には、エネルギーを補給する必要があることを報知するための文字や画像などが表示される。また、図示のように、この画面には、エネルギー補給施設まで自動運転モードを継続するかどうかを選択させる選択ボタンなどが表示されてよい。例えば、自動運転モードを継続するボタンB1がタッチ操作などで選択された場合には自動運転モードの継続が許可され、自動運転モードを停止するボタンB2がタッチ操作などで選択された場合には自動運転モードの継続が禁止される。ボタンB2が選択された場合、上述した切替制御部150は、運転モードを自動運転モードから手動運転モードに切り替える。
補給地点判定部190Cは、補給要否判定部190Bによりエネルギーを補給する必要があると判定された場合、誘導経路情報182を参照して、走行限界地点PLIMに到達するまでの誘導経路周辺にエネルギー補給施設が存在するか否かを判定する。補給地点判定部190Cは、誘導経路周辺にエネルギー補給施設が存在する場合、このエネルギー補給施設を一時的な目的地(以下、暫定目的地と称する)に設定する。そして、補給地点判定部190Cは、暫定目的地を設定したことを行動計画生成部144または軌道生成部146に通知する。これを受けて、行動計画生成部144は、自車両Mを誘導経路から暫定目的であるエネルギー補給施設内に入るように、現在のイベントを車線変更イベントや合流イベントなどに変更する。また、軌道生成部146は、自車両Mが暫定目的地付近に到達すると、現在の車線から暫定目的であるエネルギー補給施設に向けて舵を切るように(自車両Mの進行方向がエネルギー補給施設に向くように)軌道を生成する。
経路変更部190Dは、補給地点判定部190Cにより、誘導経路周辺にエネルギー補給施設が存在しないと判定された場合、高精度地図情報181を参照して、高精度地図上においてエネルギー補給施設の位置を抽出し、位置を抽出したエネルギー補給施設の中から、自車両Mの現在位置から自車両Mが最も早く到達可能なエネルギー補給施設を選択する。すなわち、経路変更部190Dは、周辺にエネルギー補給施設が存在する誘導経路以外の他の経路のうち、自車両Mの現在位置から自車両Mが最も早く到達可能なエネルギー補給施設が周辺に存在する経路を選択する。この際、経路変更部190Dは、エネルギー不足により到達できる見込みのないエネルギー補給施設を、抽出したエネルギー補給施設の中から除外してよい。
例えば、経路変更部190Dは、エネルギー導出部190Aにより誘導経路以外の他の経路ごとに導出された消費予測エネルギー量を参照して、自車両Mの現在位置から到達できないエネルギー補給施設については除外する。これによって、自車両Mを走行させる経路候補が絞り込まれるため、エネルギー補給を実施できる可能性が高まる。そして、経路変更部190Dは、自車両Mの現在位置から選択したエネルギー補給施設に至る経路を少なくとも含む補給用経路を導出して、自車両Mを走行させる経路をナビゲーション装置50により導出された誘導経路から補給用経路に変更する。
図15は、誘導経路を補給用経路に変更する場面の一例を示す図である。図中R1は、誘導経路を表し、R#aは、補給用経路を表している。また、Pnは、自車両Mの現在位置を表し、Sは自動運転開始地点を表し、Gは目的地を表し、ES1からES3は、エネルギー補給施設を表している。図示の例では、誘導経路R1沿いには、いずれのエネルギー補給施設も存在していない。また、図示の例では、自車両Mが誘導経路R1の地点Pnにおいて、補給要否判定部190Bが、目的地Gに到達するまでの間にエネルギーを補給する必要があると判定している。このような場合、経路変更部190Dは、高精度地図上においてエネルギー補給施設ES1からES3のそれぞれを抽出する。このとき、エネルギー補給施設ES3の位置と、誘導経路R1を走行した場合を想定した走行限界地点PLIMとが地点Pnから見て同程度の距離に存在するため、経路変更部190Dは、選択対象のエネルギー補給施設の中から、エネルギー補給施設ES3を除外する。そして、経路変更部190Dは、残りの2つのエネルギー補給施設ES1およびES2の中から、自車両Mがより早く到達可能な方のエネルギー補給施設を選択する。例えば、地点Pnからそれぞれのエネルギー補給施設に至るまでの経路の最短距離を考えた場合、図示の例では、エネルギー補給施設ES2に至るまでの経路TR2に比して、エネルギー補給施設ES1に至るまでの経路TR1の方が短い。従って、経路変更部190Dは、エネルギー補給施設ES1を選択する。そして、経路変更部190Dは、エネルギー補給施設ES1に向かうための経路TR1と、エネルギー補給施設ES1から目的地Gに至るまでの任意の経路とにより構成される補給用経路R#aを高精度地図上から導出し、自車両Mを走行させる経路を誘導経路R1から補給用経路R#aに変更する。例えば、エネルギー補給後の目的地Gに至る経路は、最短距離をとるような経路あるいは走行時間が最も短くなるような経路であってよい。また、この経路は、変更前の誘導経路と一部重複してもよい。
また、経路変更部190Dは、通信装置55により受信された交通事情情報を参照して、補給用経路を導出してよい。図16は、誘導経路を補給用経路に変更する場面の他の例を示す図である。図中TJは、渋滞や事故などが発生している走行阻害地点を表している。この走行阻害地点TJでは、例えば、渋滞により低速走行する必要があったり、事故により交通規制などが敷かれ徐行での走行が必要となったりするために、渋滞や事故などが発生していないときと比べて通過するのに時間を要する。経路変更部190Dは、交通事情情報を参照して、上記走行阻害地点TJの位置を特定する。例えば、図示のように、エネルギー補給施設ES1に向かうための経路TR1上に走行阻害地点TJが存在する場合、経路TR2に比して経路TR1の方が短い場合であっても、エネルギー補給施設ES1に到達するのに要する時間T1に比してエネルギー補給施設ES2に到達するのに要する時間T2の方が短くなる場合がある。すなわち、より遠い地点に位置するエネルギー補給施設ES2の方が早い到達時刻となる場合がある。従って、経路変更部190Dは、経路TR1の距離と経路TR1を走行した場合の自車両Mの想定速度とに基づき時間T1を導出すると共に、経路TR2の距離と経路TR2を走行した場合の自車両Mの想定速度とに基づき時間T2を導出し、これらの導出した時間同士を比較することで、エネルギー補給のために寄るエネルギー補給施設を選択する。図示の例では、時間T1に比して時間T2の方が短くなる場合を示している。従って、経路変更部190Dは、エネルギー補給施設ES2に向かうための経路TR2と、エネルギー補給施設ES2から目的地Gに至るまでの任意の経路とにより構成される補給用経路R2#を高精度地図上から導出し、自車両Mを走行させる経路を誘導経路R1から補給用経路R#bに変更する。
図17は、第1の実施形態における車両制御システム100により行われる処理の流れの一例を示すフローチャートである。本フローチャートは、例えば、自動運転モードが実行される前に行われてもよいし、自動運転モードが実行されている最中に行われてもよい。また、本フローチャートの処理は、所定の周期で繰り返し行われてよい。
まず、エネルギー導出部190Aは、ナビゲーション装置50により出力された誘導経路情報182に基づいて、自車両Mが目的地に到達するまでに消費することが予測される消費予測エネルギー量を導出する(ステップS100)。
次に、補給要否判定部190Bは、エネルギー残量計測部95により計測されたエネルギー残量と、消費予測エネルギー量とに基づいて、自車両Mが目的地に到達するまでの間にエネルギーを補給する必要があるか否かを判定する(ステップS102)。エネルギーを補給する必要がない場合、補給要否判定部190Bは、本フローチャートの処理を終了する。
一方、エネルギーを補給する必要がある場合、情報提供部170Bは、HMI70の表示装置82やスピーカ83等を用いて、エネルギーを補給する必要があることを車両乗員に報知する(ステップS104)。次に、補給地点判定部190Cは、誘導経路情報182を参照して、走行限界地点PLIMに到達するまでの誘導経路周辺にエネルギー補給施設が存在するか否かを判定する(ステップS106)。誘導経路周辺にエネルギー補給施設が存在する場合、補給地点判定部190Cは、エネルギー補給施設を暫定目的地に設定する(ステップS108)。例えば、自車両Mが暫定目的地であるエネルギー補給施設付近に到達すると、軌道生成部146は、現在の自車両Mが走行する車線から、このエネルギー補給施設内に自車両を誘導すると共に、エネルギー補給施設内の所定の位置に自車両Mが停止するような軌道を生成する。
次に、補給地点判定部190Cは、暫定目的地に自車両Mが到達するまで待機し(ステップS110)、暫定目的地に自車両Mが到達してエネルギーの補給が完了すると、暫定目的地を本来の目的地に設定する(ステップS112)。このとき、例えば、軌道生成部146は、エネルギー補給施設内から元の車線に自車両を合流させる軌道を生成する。
一方、誘導経路周辺にエネルギー補給施設が存在しない場合、経路変更部190Dは、高精度地図情報181を参照して、高精度地図上においてエネルギー補給施設を抽出する(ステップS114)。次に、経路変更部190Dは、抽出したエネルギー補給施設の中から除外対象のエネルギー補給施設を除いた結果、選択可能なエネルギー補給施設が存在するか否かを判定する(ステップS116)。除外対象のエネルギー補給施設は、上述した走行限界地点PLIMまでの距離とエネルギー補給施設までの距離とが同程度のエネルギー補給施設である。言い換えれば、除外対象のエネルギー補給施設は、現在のエネルギー残量で到達するのが困難なエネルギー補給施設である。
経路変更部190Dは、選択可能なエネルギー補給施設が存在する場合、選択対象のエネルギー補給施設の中から、最も早く到達可能なエネルギー補給施設を選択する(ステップS118)。次に、経路変更部190Dは、最も早く到達可能なエネルギー補給施設に向かうための経路を含む補給用経路を導出して、この補給用経路に誘導経路を変更する(ステップS120)。
一方、抽出されたエネルギー補給施設の中から除外対象のエネルギー補給施設を除いた結果、選択可能なエネルギー補給施設が存在しなくなった場合、情報提供部170Bは、HMI70の表示装置82やスピーカ83等を用いて、適切なエネルギー補給施設が存在しないことから、エネルギー補給が可能でないということを車両乗員に報知する(ステップS122)。
次に、経路変更部190Dは、適切なエネルギー補給施設が存在しないことを行動計画生成部144または軌道生成部146に通知する。これを受けて、行動計画生成部144が、現在のイベントを、自車両Mを停止させるイベントなどに変更させたり、軌道生成部146が、軌道点Kの配置間隔を徐々に狭くしていき、自車両Mを停止させる軌道を生成したりする。これによって、自動運転制御部120は、走行に必要なエネルギーが十分でない場合に自車両Mを自動的に停止させる(ステップS124)。なお、経路変更部190Dは、適切なエネルギー補給施設が存在しないことを切替制御部150に通知してもよい。この場合、切替制御部150は、運転モードを自動運転モードから手動運転モードに切り替えることで、自車両Mの操作を車両乗員に委ねてよい。これによって、本フローチャートの処理が終了する。
以上説明した第1の実施形態によれば、設定された目的地まで走行するように、自車両Mの速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行する自動運転制御部120と、行動計画を参照し、自動運転によって自車両Mの現在位置から目的地までの誘導経路を自車両Mが走行する際に、消費することが予測される消費予測エネルギー量を導出するエネルギー導出部190Aと、エネルギー導出部190Aにより導出された消費予測エネルギー量に基づいて、誘導経路を変更する経路変更部190Dと、を備えるため、自動運転を好適に利用したエネルギー残量の管理を行うことができる。
<第2の実施形態>
以下、第2の実施形態について説明する。第2の実施形態では、誘導経路情報182に含まれる、誘導経路として選択されなかった経路候補を用いて、補給用経路を導出する点で第1の実施形態と相違する。以下、係る相違点を中心に説明する。
以下、第2の実施形態について説明する。第2の実施形態では、誘導経路情報182に含まれる、誘導経路として選択されなかった経路候補を用いて、補給用経路を導出する点で第1の実施形態と相違する。以下、係る相違点を中心に説明する。
第2の実施形態における補給地点判定部190Cは、誘導経路周辺にエネルギー補給施設が存在しないと判定した場合、誘導経路情報182を参照して、誘導経路として選択されなかった経路候補のそれぞれについて、エネルギー補給施設が存在するかを判定する。
第2の実施形態における経路変更部190Dは、自車両Mを走行させる経路を、誘導経路から当該誘導経路として選択されなかった経路候補のうち、エネルギー補給施設が存在する経路候補に変更する。
図18は、誘導経路を経路候補に変更する場面の一例を示す図である。図中R1は、誘導経路を表し、R2およびR3は、誘導経路として選択されなかった経路候補をそれぞれ表している。図示の例では、経路候補R2が示す道路沿いには、エネルギー補給施設が存在し、経路候補R3が示す道路沿いには、エネルギー補給施設が存在していない。例えば、経路変更部190Dは、補給地点判定部190Cにより、誘導経路R1周辺にエネルギー補給施設が存在しないと判定された場合、誘導経路情報182を参照して、自車両Mを走行させる経路を、誘導経路R1からエネルギー補給施設が存在する経路候補R2に変更する。この際、経路変更部190Dは、高精度地図情報181を参照して、誘導経路R1上の現在位置Pnから経路候補R2に至る経路TR1を導出する。そして、自動運転制御部120は、誘導経路R1上の現在位置Pnから経路TR1を通って経路候補R2に自車両Mを誘導する。自車両Mが経路候補R2に侵入すると、自動運転制御部120は、経路候補R2に沿って目的地Gまで自車両Mを走行させる。
なお、上述した例では、複数の経路候補のうち、いずれか1つの経路候補のみにエネルギー補給施設が存在するものとして説明したがこれに限られず、例えば、2つや3つといった複数の経路候補のそれぞれにエネルギー補給施設が存在してもよい。この場合、経路変更部190Dは、自車両Mの現在位置Pnから、それぞれの経路候補におけるエネルギー補給施設までの距離(経路に沿って走行した場合に要する距離)を導出して、この距離が最も短くなる経路候補を変更先の経路として選択する。すなわち、経路変更部190Dは、エネルギー補給施設に最も早く到達可能な経路候補を変更先の経路として選択する。なお、経路変更部190Dは、自車両Mの現在位置から、それぞれのエネルギー補給施設に到達するまでに要する時間を導出して、この時間が最も短くなる経路候補を変更先の経路として選択してもよい。
図19は、誘導経路を経路候補に変更する場面の他の例を示す図である。図示の例では、経路候補R2が示す道路沿いにはエネルギー補給施設ES1が存在し、経路候補R3が示す道路沿いにはエネルギー補給施設ES2が存在している。この場合、経路変更部190Dは、誘導経路R1上の現在位置Pnからエネルギー補給施設ES1に至る経路TR1の長さと、現在位置Pnからエネルギー補給施設ES2に至る経路TR2の長さとを比較する。図示の例では、経路TR2に比して経路TR1の方が短いため、経路変更部190Dは、誘導経路R2を変更先の経路として選択する。なお、経路変更部190Dは、上述した第1の実施形態と同様に、交通事情情報を参照することで、複数の経路候補の中から自車両Mを走行させる経路を選択してもよい。例えば、エネルギー補給施設ES2の方が遠方に存在する場合であっても、経路TR1において渋滞などが生じて通過に時間を要する場合、経路変更部190Dは、誘導経路R3を、自車両Mを走行させる経路として選択してよい。
以上説明した第2の実施形態によれば、上述した第1の実施形態と同様に、消費予測エネルギー量に基づいて誘導経路を変更するため、自動運転を好適に利用したエネルギー残量の管理を行うことができる。
以上、本発明を実施するための形態について実施形態を用いて説明したが、本発明はこうした実施形態に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
20…ファインダ、30…レーダ、40…カメラ、DD…検知デバイス、50…ナビゲーション装置、55…通信装置、60…車両センサ、70…HMI、95…エネルギー残量計測部、100…車両制御システム、110…目標車線決定部、120…自動運転制御部、130…自動運転モード制御部、140…自車位置認識部、142…外界認識部、144…行動計画生成部、146…軌道生成部、146A…走行態様決定部、146B…軌道候補生成部、146C…評価・選択部、150…切替制御部、160…走行制御部、170…HMI制御部、180…記憶部、190…エネルギー監視部、200…走行駆動力出力装置、210…ステアリング装置、220…ブレーキ装置、M…自車両
Claims (7)
- 設定された目的地まで走行するように、車両の速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行する自動運転制御部と、
前記自動運転の計画を参照し、前記自動運転によって前記車両の現在位置から前記目的地までの誘導経路を前記車両が走行する際に、消費することが予測されるエネルギー量を導出する導出部と、
前記導出部により導出されたエネルギー量に基づいて、前記誘導経路を変更する経路変更部と、
を備える車両制御システム。 - 前記導出部により導出されたエネルギー量に基づいて、前記車両が前記目的地に到達するまでの間に、前記車両にエネルギーの補給が必要であるか否かを判定する第1の判定部と、
前記第1の判定部により、前記車両にエネルギーの補給が必要であると判定された場合、前記誘導経路の周辺に前記エネルギーの補給施設が存在するか否かを判定する第2の判定部と、を更に備え、
前記経路変更部は、前記第2の判定部により、前記誘導経路の周辺に前記エネルギーの補給施設が存在しないと判定された場合、前記誘導経路を変更する、
請求項1に記載の車両制御システム。 - 前記経路変更部は、前記第2の判定部により、前記誘導経路の周辺に前記エネルギーの補給施設が存在しないと判定された場合、前記誘導経路を、前記エネルギーの補給施設が存在する経路であって、前記目的地に至る経路に変更する、
請求項2に記載の車両制御システム。 - 地図情報を記憶する記憶部を更に備え、
前記経路変更部は、
前記記憶部に記憶された地図情報を参照して、前記地図情報が示す地図上において前記エネルギーの補給施設を抽出し、
前記抽出した前記エネルギーの補給施設の中から、前記車両の現在位置から前記車両が最も早く到達可能なエネルギーの補給施設を選択し、
前記誘導経路を、前記選択したエネルギーの補給施設が存在する経路に変更する、
請求項3に記載の車両制御システム。 - 前記車両の現在位置または設定された位置から、設定された目的地に至るまでの複数の経路のうち、所定の条件を満たす経路を前記誘導経路として導出する誘導経路導出部を更に備え、
前記第2の判定部は、前記誘導経路導出部により前記誘導経路が導出される際に、前記所定の条件を満たさなかった誘導経路候補の周辺に前記エネルギーの補給施設が存在するか否かを判定し、
前記経路変更部は、前記第2の判定部により、前記誘導経路候補の周辺に前記エネルギーの補給施設が存在すると判定された場合、前記誘導経路を、前記誘導経路候補に変更する、
請求項2または3に記載の車両制御システム。 - 車載コンピュータが、
設定された目的地まで走行するように、車両の速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行し、
前記自動運転の計画を参照し、前記自動運転によって前記車両の現在位置から前記目的地までの誘導経路を前記車両が走行する際に、消費することが予測されるエネルギー量を導出し、
前記導出したエネルギー量に基づいて、前記誘導経路を変更する、
車両制御方法。 - 車載コンピュータに、
設定された目的地まで走行するように、車両の速度制御と操舵制御とのうち少なくとも一方を自動的に行う自動運転を実行させ、
前記自動運転の計画を参照させて、前記自動運転によって前記車両の現在位置から前記目的地までの誘導経路を前記車両が走行する際に、消費することが予測されるエネルギー量を導出させ、
前記導出させたエネルギー量に基づいて、前記誘導経路を変更させる、
車両制御プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016092029A JP2017198633A (ja) | 2016-04-28 | 2016-04-28 | 車両制御システム、車両制御方法、および車両制御プログラム |
| US15/494,938 US20170313321A1 (en) | 2016-04-28 | 2017-04-24 | Vehicle control system, vehicle control method, and vehicle control program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016092029A JP2017198633A (ja) | 2016-04-28 | 2016-04-28 | 車両制御システム、車両制御方法、および車両制御プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017198633A true JP2017198633A (ja) | 2017-11-02 |
Family
ID=60157766
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016092029A Pending JP2017198633A (ja) | 2016-04-28 | 2016-04-28 | 車両制御システム、車両制御方法、および車両制御プログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20170313321A1 (ja) |
| JP (1) | JP2017198633A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108216234A (zh) * | 2018-01-15 | 2018-06-29 | 河北能源职业技术学院 | 一种电动车自适应巡航控制系统及其控制方法 |
| JP2019054726A (ja) * | 2018-11-10 | 2019-04-04 | 渡邉 雅弘 | 電気自動車 |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6293197B2 (ja) * | 2016-04-26 | 2018-03-14 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| US10745009B2 (en) * | 2016-12-21 | 2020-08-18 | Samsung Electronics Co., Ltd. | Electronic apparatus for determining a dangerous situation of a vehicle and method of operating the same |
| US10303181B1 (en) | 2018-11-29 | 2019-05-28 | Eric John Wengreen | Self-driving vehicle systems and methods |
| US11073838B2 (en) | 2018-01-06 | 2021-07-27 | Drivent Llc | Self-driving vehicle systems and methods |
| JP7059652B2 (ja) * | 2018-01-25 | 2022-04-26 | トヨタ自動車株式会社 | 車両制御システム |
| US10852737B2 (en) | 2018-03-22 | 2020-12-01 | Micron Technology, Inc. | Power management, dynamic routing and memory management for autonomous driving vehicles |
| JP6861669B2 (ja) * | 2018-06-15 | 2021-04-21 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| CN110849383A (zh) * | 2018-08-21 | 2020-02-28 | 上海博泰悦臻网络技术服务有限公司 | 车载地图显示方法及车载地图系统 |
| US10471804B1 (en) | 2018-09-18 | 2019-11-12 | Drivent Llc | Self-driving vehicle systems and methods |
| US10493952B1 (en) | 2019-03-21 | 2019-12-03 | Drivent Llc | Self-driving vehicle systems and methods |
| US10479319B1 (en) | 2019-03-21 | 2019-11-19 | Drivent Llc | Self-driving vehicle systems and methods |
| US10282625B1 (en) | 2018-10-01 | 2019-05-07 | Eric John Wengreen | Self-driving vehicle systems and methods |
| US11644833B2 (en) | 2018-10-01 | 2023-05-09 | Drivent Llc | Self-driving vehicle systems and methods |
| US10794714B2 (en) | 2018-10-01 | 2020-10-06 | Drivent Llc | Self-driving vehicle systems and methods |
| US10900792B2 (en) | 2018-10-22 | 2021-01-26 | Drivent Llc | Self-driving vehicle systems and methods |
| US10832569B2 (en) | 2019-04-02 | 2020-11-10 | Drivent Llc | Vehicle detection systems |
| US11221621B2 (en) | 2019-03-21 | 2022-01-11 | Drivent Llc | Self-driving vehicle systems and methods |
| US10481606B1 (en) | 2018-11-01 | 2019-11-19 | Drivent Llc | Self-driving vehicle systems and methods |
| WO2020142066A1 (en) * | 2018-12-31 | 2020-07-09 | Thermo King Corporation | Methods and systems for providing predictive energy consumption feedback for powering a transport climate control system using external data |
| EP3915850A4 (en) * | 2019-01-21 | 2022-06-08 | Hitachi Astemo, Ltd. | VEHICLE CONTROL DEVICE, VEHICLE CONTROL METHOD AND VEHICLE CONTROL SYSTEM |
| US10377342B1 (en) | 2019-02-04 | 2019-08-13 | Drivent Technologies Inc. | Self-driving vehicle systems and methods |
| US10744976B1 (en) | 2019-02-04 | 2020-08-18 | Drivent Llc | Self-driving vehicle systems and methods |
| JP7058233B2 (ja) * | 2019-02-27 | 2022-04-21 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7159137B2 (ja) * | 2019-09-25 | 2022-10-24 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| DE102020101980A1 (de) * | 2020-01-28 | 2021-07-29 | Ford Global Technologies, Llc | Verfahren zum Bestimmen einer Fahrtroute für ein batteriebetriebenes Fahrzeug |
| JP2021142904A (ja) * | 2020-03-12 | 2021-09-24 | 本田技研工業株式会社 | 車両追従走行システム、情報処理方法、及びプログラム |
| CN114435400A (zh) * | 2022-01-29 | 2022-05-06 | 苏州挚途科技有限公司 | 无人驾驶环卫车的启动方法、无人驾驶环卫车及电子设备 |
| CN116946141B (zh) * | 2023-09-18 | 2023-11-24 | 成都赛力斯科技有限公司 | 增程式电动汽车的控制方法、装置、电动汽车及存储介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011191269A (ja) * | 2010-03-16 | 2011-09-29 | Toyota Central R&D Labs Inc | 走行方法計算装置及びプログラム |
| JP2014106137A (ja) * | 2012-11-28 | 2014-06-09 | Mitsubishi Motors Corp | 運転支援装置 |
| JP2014197020A (ja) * | 2009-05-26 | 2014-10-16 | 株式会社日立製作所 | 探索システム |
| JP2015111051A (ja) * | 2013-10-31 | 2015-06-18 | 三菱重工業株式会社 | 走行経路案内装置、走行経路案内システム、走行経路案内方法およびプログラム |
| JP2015224954A (ja) * | 2014-05-28 | 2015-12-14 | クラリオン株式会社 | 駐車場所選択装置 |
| JP2015224871A (ja) * | 2014-05-26 | 2015-12-14 | 株式会社日立製作所 | センタ装置、運転支援システム及び運転支援方法 |
-
2016
- 2016-04-28 JP JP2016092029A patent/JP2017198633A/ja active Pending
-
2017
- 2017-04-24 US US15/494,938 patent/US20170313321A1/en not_active Abandoned
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014197020A (ja) * | 2009-05-26 | 2014-10-16 | 株式会社日立製作所 | 探索システム |
| JP2011191269A (ja) * | 2010-03-16 | 2011-09-29 | Toyota Central R&D Labs Inc | 走行方法計算装置及びプログラム |
| JP2014106137A (ja) * | 2012-11-28 | 2014-06-09 | Mitsubishi Motors Corp | 運転支援装置 |
| JP2015111051A (ja) * | 2013-10-31 | 2015-06-18 | 三菱重工業株式会社 | 走行経路案内装置、走行経路案内システム、走行経路案内方法およびプログラム |
| JP2015224871A (ja) * | 2014-05-26 | 2015-12-14 | 株式会社日立製作所 | センタ装置、運転支援システム及び運転支援方法 |
| JP2015224954A (ja) * | 2014-05-28 | 2015-12-14 | クラリオン株式会社 | 駐車場所選択装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108216234A (zh) * | 2018-01-15 | 2018-06-29 | 河北能源职业技术学院 | 一种电动车自适应巡航控制系统及其控制方法 |
| JP2019054726A (ja) * | 2018-11-10 | 2019-04-04 | 渡邉 雅弘 | 電気自動車 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170313321A1 (en) | 2017-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6293197B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6275187B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017198633A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6337382B2 (ja) | 車両制御システム、交通情報共有システム、車両制御方法、および車両制御プログラム | |
| JP6338159B2 (ja) | 交通状況推定装置、車両制御システム、経路誘導装置、交通状況推定方法、および交通状況推定プログラム | |
| JP6387548B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6692898B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6375568B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6745334B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| WO2017158768A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6623468B2 (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| JPWO2017179193A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017081426A (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| JP2017165289A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6582339B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017207907A (ja) | 車両制御システム、通信システム、車両制御方法、および車両制御プログラム | |
| JPWO2017159493A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JPWO2017168738A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6572506B2 (ja) | 車両制御システム | |
| JP6650331B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017200785A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017214035A (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP2017084115A (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| JP2017081421A (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| WO2017179172A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171205 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180222 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180724 |