JP2017159741A - 制御システム - Google Patents
制御システム Download PDFInfo
- Publication number
- JP2017159741A JP2017159741A JP2016044605A JP2016044605A JP2017159741A JP 2017159741 A JP2017159741 A JP 2017159741A JP 2016044605 A JP2016044605 A JP 2016044605A JP 2016044605 A JP2016044605 A JP 2016044605A JP 2017159741 A JP2017159741 A JP 2017159741A
- Authority
- JP
- Japan
- Prior art keywords
- soc
- battery
- limit value
- control system
- correction factor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012937 correction Methods 0.000 claims abstract description 181
- 230000006866 deterioration Effects 0.000 claims abstract description 33
- 230000001133 acceleration Effects 0.000 claims abstract description 32
- 230000007774 longterm Effects 0.000 claims abstract description 25
- 230000008859 change Effects 0.000 claims description 40
- 238000001514 detection method Methods 0.000 claims description 11
- 239000000446 fuel Substances 0.000 claims description 10
- 238000010248 power generation Methods 0.000 claims description 6
- 230000003247 decreasing effect Effects 0.000 claims description 2
- 238000000034 method Methods 0.000 description 35
- 230000008569 process Effects 0.000 description 34
- 238000012545 processing Methods 0.000 description 8
- 230000001172 regenerating effect Effects 0.000 description 8
- 238000013459 approach Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 230000008094 contradictory effect Effects 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000003792 electrolyte Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910000652 nickel hydride Inorganic materials 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Landscapes
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Navigation (AREA)
Abstract
Description
バッテリのSOCを検出するSOC検出部(12、30)と、
SOC検出部によって検出されるSOCが、所定のSOC目標値を基準として、SOC上限値及びSOC下限値によって規定される範囲内に収まるように、バッテリから放電される電力及びバッテリに充電される電力を制御する制御部(32)と、
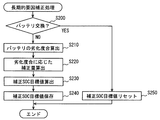
バッテリの劣化度合を推定する劣化度合推定部(S210)と、
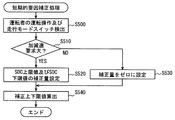
ハイブリッド車両の運転者による加減速要求の大きさ推定する加減速要求推定部(S500、S510)と、を備え、
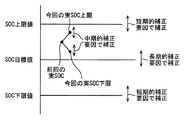
制御部は、劣化度合推定部によって推定されるバッテリの劣化度合を長期的補正要因とし、当該長期的補正要因に応じてSOC目標値を補正するとともに、加減速要求推定部によって推定される運転者の加減速要求の大きさを短期的補正要因とし、当該短期的補正要因に応じてSOC上限値及びSOC下限値を補正するように構成される。
Claims (16)
- 車両の駆動源としてのモータ(16)及びエンジン(18)と、前記モータを駆動するための電力を蓄積するバッテリ(10)と、前記バッテリを充電するための電力を発電する発電部(14、16)と、を備えるハイブリッド車両に適用され、前記バッテリの充電状態を制御するための制御システムであって、
前記バッテリのSOCを検出するSOC検出部(12、30)と、
前記SOC検出部によって検出されるSOCが、所定のSOC目標値を基準として、SOC上限値及びSOC下限値によって規定される範囲内に収まるように、前記バッテリから放電される電力及び前記バッテリに充電される電力を制御する制御部(32)と、
前記バッテリの劣化度合を推定する劣化度合推定部(S210)と、
前記ハイブリッド車両の運転者による加減速要求の大きさ推定する加減速要求推定部(S510)と、を備え、
前記制御部は、前記劣化度合推定部によって推定される前記バッテリの劣化度合を長期的補正要因とし、当該長期的補正要因に応じて前記SOC目標値を補正するとともに、前記加減速要求推定部によって推定される運転者の加減速要求の大きさを短期的補正要因とし、当該短期的補正要因に応じて前記SOC上限値及び前記SOC下限値を補正する制御システム。 - 前記ハイブリッド車両を目的地までルート案内するナビゲーション装置(20)を備え、
前記制御部は、前記ナビゲーション装置において目的地までのルートが設定された場合、前記ルートを中期的補正要因とし、当該中期的補正要因に応じて単位時間当りのSOC変化量の制限値を補正し、前記SOC検出部によって検出されるSOCの変化量が、制限値以下となるように、前記バッテリから放電される電力及び前記バッテリに充電される電力を制御する請求項1に記載の制御システム。 - 前記制御部は、前記ルートにおける道路勾配の大きさが大きい場合には、小さい場合に比較して、前記SOC変化量の制限値が大きくなるように補正する請求項2に記載の制御システム。
- 前記制御部は、前記ルートにおける曲線道路の数が多い場合には、少ない場合に比較して、前記SOC変化量の制限値が大きくなるように補正する請求項2に記載の制御システム。
- 前記バッテリは、外部から充電することが可能なものであり、
前記制御部は、前記バッテリが外部充電されたこと、及び、前記エンジンの燃料が給油されたことを中期的補正要因とし、当該中期的補正要因に応じて単位時間当りのSOC変化量の制限値を補正し、前記SOC検出部によって検出されるSOCの変化量が、制限値以下となるように、前記バッテリから放電される電力及び前記バッテリに充電される電力を制御する請求項1に記載の制御システム。 - 前記制御部は、前記バッテリが外部充電された場合には、前記SOC変化量の制限値が大きくなり、前記エンジンの燃料が給油された場合には、それよりも前記SOC変化量の制限値が小さくなるように補正する請求項5に記載の制御システム。
- 前記制御部は、前記SOC目標値の大きさを中期的補正要因とし、前記SOC目標値の大きさに応じて、単位時間当りのSOC変化量の制限値を補正し、前記SOC検出部によって検出されるSOCの変化量が、制限値以下となるように、前記バッテリから放電される電力及び前記バッテリに充電される電力を制御する請求項1に記載の制御システム。
- 前記制御部は、前記SOC目標値がSOC上下限値によって規定される範囲の中央値よりも大きい場合には、小さい場合に比較して、増加側のSOC変化量の制限値が小さくなるように補正する請求項7に記載の制御システム。
- 前記制御部は、前記SOC目標値がSOC上下限値によって規定される範囲の中央値よりも小さい場合には、大きい場合に比較して、減少側のSOC変化量の制限値が小さくなるように補正する請求項7又は8に記載の制御システム。
- 前記ハイブリッド車両は、先行車両に追従走行するように、自動的に速度を調節する機能を備え、
所定の加速度以上の急加速が行われる頻度が所定値以上である場合に、その急加速を抑えるため、減少側のSOC目標値の変化量の制限値を小さくなるように補正する請求項1に記載の制御システム。 - 前記制御部は、前記ハイブリッド車両の運転者の加減速要求が大きい場合には、加減速要求が小さい場合に比較して、前記SOC上限値と前記SOC下限値とによって規定される範囲が拡大されるように前記SOC上限値及び/又は前記SOC下限値を補正する請求項1に記載の制御システム。
- 前記バッテリに蓄積された電力により作動する、前記ハイブリッド車両に搭載された電気機器(22)の稼働状況を検出する稼働状況検出部(S600)を備え、
前記制御部は、前記稼働状況検出部により検出される前記電気機器の稼働状況を短期的補正要因として、前記SOC上限値及び前記SOC下限値を補正する請求項1に記載の制御システム。 - 前記制御部は、前記電気機器の稼動状況に基づき、前記バッテリの消費電力が大きいと判定した場合には、前記バッテリの消費電力が大きいと判定した場合に比較して、前記SOC上限値と前記SOC下限値とによって規定される範囲が拡大されるように前記SOC上限値及び/又は前記SOC下限値を補正する請求項12に記載の制御システム。
- 前記劣化度合推定部は、前記バッテリの使用継続時間、温度履歴、過充放電履歴の少なくとも1つに基づいて、前記バッテリの劣化度合を推定する請求項1乃至13のいずれかに記載の制御システム。
- 前記制御部は、前記劣化度合推定部により推定される前記バッテリの劣化度合の進行に伴い、前記SOC目標値を増加するように補正する請求項14に記載の制御システム。
- 前記制御部は、前記バッテリが交換されたとき、前記SOC目標値に対する補正値をリセットする請求項14又は15に記載の制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016044605A JP6558280B2 (ja) | 2016-03-08 | 2016-03-08 | 制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016044605A JP6558280B2 (ja) | 2016-03-08 | 2016-03-08 | 制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017159741A true JP2017159741A (ja) | 2017-09-14 |
| JP6558280B2 JP6558280B2 (ja) | 2019-08-14 |
Family
ID=59854614
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016044605A Active JP6558280B2 (ja) | 2016-03-08 | 2016-03-08 | 制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6558280B2 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019059324A (ja) * | 2017-09-26 | 2019-04-18 | 株式会社Subaru | ハイブリッド車両のパワーユニット |
| JP2019075895A (ja) * | 2017-10-16 | 2019-05-16 | 三菱自動車工業株式会社 | 電動車両用の充電制御装置 |
| CN110271535A (zh) * | 2018-03-14 | 2019-09-24 | 丰田自动车株式会社 | 混合动力车辆及混合动力车辆的控制方法 |
| JP2019182276A (ja) * | 2018-04-12 | 2019-10-24 | 本田技研工業株式会社 | 車両用駆動装置の制御装置 |
| KR102064423B1 (ko) * | 2017-11-24 | 2020-01-10 | 주식회사 경신 | 가변형 배터리 제어 장치 및 방법 |
| WO2020129630A1 (ja) * | 2018-12-17 | 2020-06-25 | 日立オートモティブシステムズ株式会社 | 運転制御装置 |
| FR3101733A1 (fr) * | 2019-10-07 | 2021-04-09 | Continental Automotive | Procédé de stabilisation de l’état d’une charge d’une batterie de traction |
| CN113753019A (zh) * | 2020-06-04 | 2021-12-07 | 广州汽车集团股份有限公司 | 一种混动车辆动力部件控制方法及系统 |
| JP2022034917A (ja) * | 2020-08-19 | 2022-03-04 | スズキ株式会社 | ハイブリッド車両の制御装置 |
| CN114789716A (zh) * | 2021-01-08 | 2022-07-26 | 丰田自动车株式会社 | 车辆用控制装置、车辆用控制系统以及混合动力车辆 |
| US12304322B2 (en) | 2018-10-31 | 2025-05-20 | Panasonic Intellectual Property Management Co., Ltd. | Information processing system, control device, and vehicle power supply system |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220094042A (ko) | 2020-12-28 | 2022-07-05 | 주식회사 엘지에너지솔루션 | 이차 전지 진단 장치 및 방법 |
Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000261914A (ja) * | 1999-03-10 | 2000-09-22 | Hitachi Ltd | 電気車制御装置 |
| JP2001145213A (ja) * | 1999-11-11 | 2001-05-25 | Honda Motor Co Ltd | バッテリ充電方法 |
| JP2002051405A (ja) * | 2000-07-31 | 2002-02-15 | Sanyo Electric Co Ltd | ハイブリッド電気自動車 |
| JP2002204503A (ja) * | 2001-01-09 | 2002-07-19 | Toyota Motor Corp | 車両用動力装置の制御装置 |
| JP2006197765A (ja) * | 2005-01-17 | 2006-07-27 | Toyota Motor Corp | 移動体の価格設定システムおよび価格設定方法 |
| JP2006340559A (ja) * | 2005-06-06 | 2006-12-14 | Fujitsu Ten Ltd | 車両制御装置、その制御方法及びプログラム |
| JP2007062403A (ja) * | 2005-08-29 | 2007-03-15 | Mazda Motor Corp | 自動車の追従走行装置 |
| JP2008087516A (ja) * | 2006-09-29 | 2008-04-17 | Toyota Motor Corp | ハイブリッド車両およびハイブリッド車両の走行制御方法 |
| JP2009137340A (ja) * | 2007-12-04 | 2009-06-25 | Nissan Motor Co Ltd | 電力マネージメントシステム及び電力マネージメント方法 |
| JP2011098638A (ja) * | 2009-11-05 | 2011-05-19 | Toyota Motor Corp | ハイブリッド自動車およびその制御方法 |
| JP2012147554A (ja) * | 2011-01-11 | 2012-08-02 | Toyota Motor Corp | 車両制御装置 |
| US20120208672A1 (en) * | 2011-01-13 | 2012-08-16 | Vivek Anand Sujan | System, method, and apparatus for controlling power output distribution in a hybrid power train |
| JPWO2010109956A1 (ja) * | 2009-03-27 | 2012-09-27 | 株式会社日立製作所 | 蓄電装置 |
| JP2013056647A (ja) * | 2011-09-09 | 2013-03-28 | Hitachi Constr Mach Co Ltd | 作業機械の駆動制御装置 |
| JP2013103645A (ja) * | 2011-11-15 | 2013-05-30 | Honda Motor Co Ltd | ハイブリッド車両の制御装置 |
-
2016
- 2016-03-08 JP JP2016044605A patent/JP6558280B2/ja active Active
Patent Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000261914A (ja) * | 1999-03-10 | 2000-09-22 | Hitachi Ltd | 電気車制御装置 |
| JP2001145213A (ja) * | 1999-11-11 | 2001-05-25 | Honda Motor Co Ltd | バッテリ充電方法 |
| JP2002051405A (ja) * | 2000-07-31 | 2002-02-15 | Sanyo Electric Co Ltd | ハイブリッド電気自動車 |
| JP2002204503A (ja) * | 2001-01-09 | 2002-07-19 | Toyota Motor Corp | 車両用動力装置の制御装置 |
| JP2006197765A (ja) * | 2005-01-17 | 2006-07-27 | Toyota Motor Corp | 移動体の価格設定システムおよび価格設定方法 |
| JP2006340559A (ja) * | 2005-06-06 | 2006-12-14 | Fujitsu Ten Ltd | 車両制御装置、その制御方法及びプログラム |
| JP2007062403A (ja) * | 2005-08-29 | 2007-03-15 | Mazda Motor Corp | 自動車の追従走行装置 |
| JP2008087516A (ja) * | 2006-09-29 | 2008-04-17 | Toyota Motor Corp | ハイブリッド車両およびハイブリッド車両の走行制御方法 |
| JP2009137340A (ja) * | 2007-12-04 | 2009-06-25 | Nissan Motor Co Ltd | 電力マネージメントシステム及び電力マネージメント方法 |
| JPWO2010109956A1 (ja) * | 2009-03-27 | 2012-09-27 | 株式会社日立製作所 | 蓄電装置 |
| JP2011098638A (ja) * | 2009-11-05 | 2011-05-19 | Toyota Motor Corp | ハイブリッド自動車およびその制御方法 |
| JP2012147554A (ja) * | 2011-01-11 | 2012-08-02 | Toyota Motor Corp | 車両制御装置 |
| US20120208672A1 (en) * | 2011-01-13 | 2012-08-16 | Vivek Anand Sujan | System, method, and apparatus for controlling power output distribution in a hybrid power train |
| JP2013056647A (ja) * | 2011-09-09 | 2013-03-28 | Hitachi Constr Mach Co Ltd | 作業機械の駆動制御装置 |
| JP2013103645A (ja) * | 2011-11-15 | 2013-05-30 | Honda Motor Co Ltd | ハイブリッド車両の制御装置 |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019059324A (ja) * | 2017-09-26 | 2019-04-18 | 株式会社Subaru | ハイブリッド車両のパワーユニット |
| JP7025164B2 (ja) | 2017-09-26 | 2022-02-24 | 株式会社Subaru | ハイブリッド車両のパワーユニット |
| JP2019075895A (ja) * | 2017-10-16 | 2019-05-16 | 三菱自動車工業株式会社 | 電動車両用の充電制御装置 |
| KR102064423B1 (ko) * | 2017-11-24 | 2020-01-10 | 주식회사 경신 | 가변형 배터리 제어 장치 및 방법 |
| CN110271535B (zh) * | 2018-03-14 | 2022-06-14 | 丰田自动车株式会社 | 混合动力车辆及混合动力车辆的控制方法 |
| CN110271535A (zh) * | 2018-03-14 | 2019-09-24 | 丰田自动车株式会社 | 混合动力车辆及混合动力车辆的控制方法 |
| JP2019182276A (ja) * | 2018-04-12 | 2019-10-24 | 本田技研工業株式会社 | 車両用駆動装置の制御装置 |
| US12304322B2 (en) | 2018-10-31 | 2025-05-20 | Panasonic Intellectual Property Management Co., Ltd. | Information processing system, control device, and vehicle power supply system |
| WO2020129630A1 (ja) * | 2018-12-17 | 2020-06-25 | 日立オートモティブシステムズ株式会社 | 運転制御装置 |
| JP2020097278A (ja) * | 2018-12-17 | 2020-06-25 | 日立オートモティブシステムズ株式会社 | 運転制御装置 |
| CN113165635A (zh) * | 2018-12-17 | 2021-07-23 | 日立安斯泰莫株式会社 | 驾驶控制装置 |
| JP7181783B2 (ja) | 2018-12-17 | 2022-12-01 | 日立Astemo株式会社 | 運転制御装置 |
| WO2021069356A1 (fr) * | 2019-10-07 | 2021-04-15 | Vitesco Technologies GmbH | Procede de stabilisation de l'etat d'une charge d'une batterie de traction |
| FR3101733A1 (fr) * | 2019-10-07 | 2021-04-09 | Continental Automotive | Procédé de stabilisation de l’état d’une charge d’une batterie de traction |
| CN113753019A (zh) * | 2020-06-04 | 2021-12-07 | 广州汽车集团股份有限公司 | 一种混动车辆动力部件控制方法及系统 |
| JP2022034917A (ja) * | 2020-08-19 | 2022-03-04 | スズキ株式会社 | ハイブリッド車両の制御装置 |
| JP7484562B2 (ja) | 2020-08-19 | 2024-05-16 | スズキ株式会社 | ハイブリッド車両の制御装置 |
| CN114789716A (zh) * | 2021-01-08 | 2022-07-26 | 丰田自动车株式会社 | 车辆用控制装置、车辆用控制系统以及混合动力车辆 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6558280B2 (ja) | 2019-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6558280B2 (ja) | 制御システム | |
| JP6011541B2 (ja) | 充電制御装置および充電制御方法 | |
| JP5608747B2 (ja) | 蓄電容量管理装置 | |
| US8854010B2 (en) | Control apparatus and control method for electric storage apparatus | |
| US9796294B2 (en) | Vehicle driven by electric motor and control method for vehicle | |
| KR101836250B1 (ko) | 구동 모터를 구비한 차량의 dc 컨버터의 출력 전압을 제어하는 방법 및 장치 | |
| JP2009248822A (ja) | 蓄電量制御装置 | |
| JP2010098897A (ja) | 電動車両用バッテリの充電方法およびその装置 | |
| CN103827684A (zh) | 非水二次电池的控制装置和控制方法 | |
| US9849773B2 (en) | Generation control apparatus | |
| JP6597592B2 (ja) | 電動車両 | |
| JP2010140762A (ja) | リチウムイオン電池の状態を判別する判別装置 | |
| JP2010123503A (ja) | 充電制御装置 | |
| JP6136965B2 (ja) | ハイブリッド車制御装置 | |
| JP6435789B2 (ja) | ハイブリッド駆動車両の出力制御装置 | |
| JP2014222989A (ja) | 電気自動車の回生制御装置 | |
| JP2018501148A (ja) | ハイブリッド車両の走行用バッテリの充電状態を管理するための方法 | |
| JP6269097B2 (ja) | 電気自動車制御システム | |
| JP2005261034A (ja) | 蓄電機構の制御装置 | |
| EP3666586B1 (en) | Method and device for controlling hybrid vehicle | |
| JP2014011826A (ja) | 車両のバッテリ充電状態制御装置 | |
| JP6145998B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6471599B2 (ja) | 車両の発電制御装置 | |
| KR102439628B1 (ko) | 하이브리드 차량의 주행 제어 방법 | |
| JP5267882B2 (ja) | 発電制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180604 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190402 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190618 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190701 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6558280 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |