JP2017145143A - アシストスーツ - Google Patents
アシストスーツ Download PDFInfo
- Publication number
- JP2017145143A JP2017145143A JP2017099054A JP2017099054A JP2017145143A JP 2017145143 A JP2017145143 A JP 2017145143A JP 2017099054 A JP2017099054 A JP 2017099054A JP 2017099054 A JP2017099054 A JP 2017099054A JP 2017145143 A JP2017145143 A JP 2017145143A
- Authority
- JP
- Japan
- Prior art keywords
- hand
- operator
- state
- load
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Manipulator (AREA)
Abstract
【解決手段】作業者の背中部に取り付けられる本体部1と、前記本体部1から作業者の右及び左の肩部を越えて前方に延出された右及び左の上アーム部14と、前記右及び左の上アーム部14から下方に延出された右及び左の長尺体18と、前記右及び左の長尺体18に連結され荷物を保持する右及び左のハンド部19とが備えられたアシストスーツ。
【選択図】図1
Description
特許文献1では、胴外骨格(特許文献1の図1の160)、胴外骨格から作業者を越えて前方に延出された荷吊り上げ機構(特許文献1の図1の221)、荷吊り上げ機構を駆動する駆動装置を備えて、アシストスーツが構成されている。
これにより、アシストスーツを装着した状態において、作業者が荷吊り上げ機構により荷物を保持するのであり、この状態で荷物は荷吊り上げ機構に支持される。作業者は荷吊り上げ機構のエンド・エフェクタを手で持つことにより、荷物の位置を安定させる(荷物が振ら付かないようにする)。
駆動装置によりケーブルを本体部に巻き取り駆動することによって、荷吊り上げ機構のエンド・エフェクタ(荷物)を上昇させることができるのであり、駆動装置によりケーブルを本体部から繰り出し駆動することによって、荷吊り上げ機構のエンド・エフェクタ(荷物)を下降させることができる。
本発明の第1特徴は、アシストスーツにおいて次のように構成することにある。
作業者の背中部に取り付けられる本体部と、前記本体部から作業者の右及び左の肩部を越えて前方に延出された右及び左の上アーム部と、前記右及び左の上アーム部から下方に延出された右及び左のワイヤと、作業者が手で持つことにより荷物を保持するもので前記右及び左のワイヤに連結された右及び左のハンド部とが備えられ、
前記ワイヤを前記本体部に巻き取り駆動及び前記本体部から繰り出し駆動する駆動装置と、作業者により操作される上昇操作部及び下降操作部とが備えられて、
前記上昇操作部の信号に基づいて、前記ワイヤを前記本体部に巻き取り駆動することにより前記ハンド部を上昇させ、前記下降操作部の信号に基づいて、前記ワイヤを前記本体部から繰り出し駆動することにより前記ハンド部を下降させるように、前記駆動装置を作動させる制御装置が備えられ、
前記下降操作部が操作された状態から操作されない状態に切り換わると、前記制御装置が荷物を保持していない前記ハンド部を上昇させる程度の弱い駆動力で前記駆動装置を作動させて、前記ワイヤが前記本体部に巻き取り駆動されるように構成されている。
本発明の第1特徴によると、作業者がアシストスーツを装着した状態において、本体部から作業者の右及び左の肩部を越えて前方に右及び左の上アーム部が延出され、右及び左の上アーム部から下方に右及び左のワイヤが延出されて、右及び左のワイヤに右及び左のハンド部が連結されている。これにより、右及び左のハンド部が作業者の右及び左前側に位置する状態となる。
作業者が上昇操作部を操作することによって、駆動装置によりワイヤを本体部に巻き取り駆動することにより、ハンド部(荷物)を上昇させることができるのであり、作業者が下降操作部を操作することによって、駆動装置によりワイヤを本体部から繰り出し駆動することにより、ハンド部(荷物)を下降させることができる。
次にハンド部を使用しない別の作業を行う場合、作業者がハンド部から荷物を外してハンド部から手を離すと、駆動装置によりワイヤが本体部に巻き取り駆動されるのであり、ハンド部が上昇する。
これにより、作業者の右及び左前側に右及び左のハンド部が存在せず、右及び左のハンド部が作業者の右及び左上方に位置する状態となるので、ハンド部を使用しない別の作業を行う際にハンド部が邪魔にならず、ハンド部を使用しない別の作業が支障なく行えるようになる。
従って、上昇中のハンド部が他物に引っ掛かるような状態が生じても、他物への引っ掛かりによる抵抗に前述の弱い動力が負けてハンド部が停止することが予想されるので、上昇中のハンド部が他物に引っ掛かって他物が破損するというような状態は生じ難い。
前項[I]−2に記載のように、ハンド部を使用しない別の作業を行う場合、荷物を持していないハンド部を上昇させる程度の弱い動力で、駆動装置によりワイヤが本体部に巻き取り駆動されて、ハンド部が上昇する。
これにより、次にハンド部を使用しない別の作業からハンド部を使用する作業を行う場合、作業者が手で上方のハンド部を持ち、前述の弱い動力に打ち勝つ程度の力でハンド部を下降させることにより、作業者の右及び左前側に右及び左のハンド部を位置させることができるのであり、ハンド部を使用しない別の作業からハンド部を使用する作業に無理なく移行することができる。
本発明の第2特徴は、本発明の第1特徴のアシストスーツにおいて次のように構成することにある。
前記ワイヤの下降を停止可能なブレーキが備えられており、
前記制御装置が、
前記上昇操作部及び前記下降操作部の一方が操作されていると、前記ブレーキを解除状態に操作し、且つ、
前記上昇操作部が操作された状態から操作されない状態に切り換わると、前記駆動装置を停止させて、前記ブレーキを制動状態に操作し、且つ、
前記上昇操作部及び前記下降操作部の両方が同時に操作されていると、前記駆動装置を停止させて、前記ブレーキを制動状態に操作するように構成されている。
本発明の第2特徴によれば、作業者が上昇操作部及び下降操作部の一方を操作していると、ブレーキが解除状態に操作されて、駆動装置によるハンド部の上昇及び下降が支障なく行われる。
作業者が上昇操作部及び下降操作部の両方が同時に操作していると、作業者の誤操作と想定されるので、ブレーキが制動状態に操作されて、ハンド部が荷物の重量で下降するようなことはない。
本発明の第3特徴は、本発明の第1又は第2特徴のアシストスーツにおいて次のように構成することにある。
前記駆動装置の動力を前記ワイヤに伝動及び遮断自在なクラッチと、前記ハンド部が荷物を保持しているか否かを検出する荷物センサーと、前記ハンド部に荷物が保持されていない状態で前記ハンド部が下方に操作されたことを検出する下方移動検出手段とが備えられて、
前記制御装置が、前記下方移動検出手段の検出に基づいて、前記クラッチを遮断状態に操作するように構成されている。
前項[I]−2,3に記載のように、ハンド部を使用しない別の作業からハンド部を使用する作業を行う場合に、本発明の第3特徴によれば、作業者が手で上方のハンド部を持ち下降させると、ハンド部に荷物が保持されていないことにより、駆動装置の動力をワイヤに伝動するクラッチが遮断状態に操作されるので、ハンド部の下降に対して駆動装置が抵抗とはならなくなる。
これにより、作業者は、ハンド部を軽い力で素早く下降させることができて、作業者の右及び左前方に右及び左のハンド部を位置させることができるのであり、ハンド部を使用しない別の作業からハンド部を使用する作業に、無理なく且つ素早く移行することができる。
先ずアシストスーツの全体構成及び本体部1について説明する。
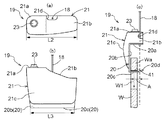
図1及び図2に示すように、作業者の背中部に取り付けられる本体部1と、本体部1から延出されて作業者の脚部に作用する右及び左の脚作用部2と、本体部1から作業者を越えて前方に延出されて荷物を保持する為のもので作業者が手で持って操作する右及び左の荷物作用部3とが備えられて、アシストスーツが構成されている。
この場合、縦フレーム4の左右方向の間隔が作業者(一般的な成人男性)の肩幅よりも狭いものに設定されており、縦フレーム4の下部において支持板6が縦フレーム4から右及び左の横外方に突出する状態となっている。縦フレーム4の上部(上の横フレーム5)が、作業者(一般的な成人男性)の肩よりも高い位置に位置するように、縦フレーム4の長さが設定されている。
次に、右及び左の脚作用部2について説明する。
図1及び図2に示すように、右及び左の縦フレーム4の下部(本体部1の下部)から、右及び左の支持部9が前方に延出されて、支持部9(本体部1)の左右方向の横軸芯P1周りに、右及び左の下アーム部10が上下に揺動自在に支持されている。
この場合、作業者の腰部が支持部9の間に入り込むことにより、本体部1の左右の振れが止められている。側面視で作業者の股関節の位置と横軸芯P1の位置とが略同じ位置に位置するように(接近するように)、支持部9の長さが設定されている。
以上のように、下アーム部10、支持板11及び脚パッド12等により、脚作用部2が構成されている。
これにより、下アーム部10の長手方向に沿っての支持板11及び脚パッド12の移動に対して、ノブ付きボルト13により下アーム部10の先端部側の移動限界位置を決めることができるのであり、ノブ付きボルト13の位置を下アーム部10の長手方向に沿って変更することにより、移動限界位置を下アーム部10の長手方向に沿って変更することができる。
次に、右及び左の荷物作用部3について説明する。
図1及び図2に示すように、右の縦フレーム4の上部から右の上アーム部14が作業者の右の肩部を越えて右斜め前方の斜め上方に延出されており、左の縦フレーム4の上部から左の上アーム部14が作業者の左の肩部を越えて左斜め前方の斜め上方に延出されている。上アーム部14の下部に下プーリー15が回転自在に支持され、上アーム部14の上部に上プーリー16が回転自在に支持されている。
この場合、前述のように、上アーム部14の上部(上プーリー16)が、背面視(正面視)で作業者の右及び左の肩部の少し横外側の上方に位置し、且つ、側面視で作業者の胸部よりも前方に突出しない状態であることにより、右及び左のハンド部19が作業者の右及び左前側に位置する状態となる(作業者の手に近い位置に位置する状態となる)。
次に、作業者が手で持つことにより荷物を保持する右及び左のハンド部19について説明する。
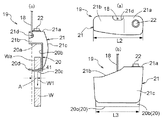
図5及び図6に示すように、右及び左のハンド部19は、金属製のフック部20の外面に合成樹脂製のグリップ部21を取り付けて構成されており、右のハンド部19と左のハンド部19とは左右対称形状をしている。
前述のハンド部19の状態において、グリップ部21の第1上側部21aが前側に位置する前後向きで、フック部の下側部20c及び突出部20dが左右中央側に向いており、作業者が前方の人物と握手をするような手の状態でハンド部19を握るようにして持つ。
次に、駆動装置17について説明する。
図1及び図2に示すように、電動モータ(図示せず)及び遊星減速ギヤ(図示せず)を内装して駆動ユニット24が構成されて、2個の駆動ユニット24が互いに対向するように横向きに支持板6に連結されており、2個の駆動ユニット24により1個の駆動ギヤ25が駆動される。
この場合、制御装置32及びバッテリー33が支持フレーム31により本体部1から後方に少し離れるように支持されており、本体部1から前方に延出される支持部9(脚作用部2)及び上アーム部14(荷物作用部3)に対して、制御装置32及びバッテリー33がバランスウェイトとして機能する。
後述する[7]〜[10]に記載のように、上昇及び下降操作スイッチ22,23の信号に基づいて、バッテリー33を動力源として、制御装置32により駆動ユニット24、第1及び第2クラッチ27,29及びブレーキ30が作動する。
次に、駆動装置17による脚作用部2及び荷物作用部3の駆動構造について説明する。
図1に示すように、支持部9の左右方向の横軸芯P3周りに、アーム34揺動自在に支持されてバネ42により下方(後方)に付勢されており、アーム34にテンションプーリー35が回転自在に支持されている。支持部9にプーリー36が位置固定状態で回転自在に支持されている。
例えば床に置かれた荷物Wを高い棚やトラックの荷台に置くような場合、作業者がしゃがんで床の荷物Wを手で持ち、次に手を下に延ばした状態で荷物Wを持ちながら立ち上がり、次に手で荷物Wを持ち上げて、荷物Wを高い棚やトラックの荷台に置くような状態が想定される。
前述の状態において、上昇及び下降操作スイッチ22,23の押し操作に基づく制御装置32の作動について、本項[7]及び後述する[8]〜[11]、図7に基づいて説明する。
これにより、後述するようにハンド部19(フック部20)の下側部20cに荷物Wの持ち手部Waを載せることによって、ハンド部19により荷物Wを保持した場合、ハンド部19により荷物Wを保持していることが荷物センサー41により検出される。
この場合、荷物Wを保持していないハンド部19を上昇させる程度の弱い動力で、駆動ユニット24によりワイヤ18が本体部1に巻き取り駆動されている。
この場合、図3及び図4に示すように、作業者の太腿部の適切な位置(例えば膝部の少し上側部)に脚パッド12が接触するように、ノブ付きボルト13により下アーム部10の先端部側の移動限界位置を決めておけばよい(前項[2]参照)。
作業者がしゃがむ際に作業者の太腿部の移動軌跡と下アーム部10の移動軌跡とに差が発生しても、作業者の太腿部が上がることに伴って、支持板11及び脚パッド12が下アーム部10の長手方向に沿って移動することにより、作業者の太腿部の移動軌跡と下アーム部10の移動軌跡との差が吸収されるのであり、作業者は無理なくしゃがむことができる(前項[2]参照)。
ハンド部19において、フック部20の上側部20a(グリップ部21の第1及び第2上側部21a,21b)の前後幅L2よりも、フック部20の下側部20c及び突出部20dの前後幅L3が小さいものに構成されていることにより、ハンド部19(フック部20)の下側部20c及び突出部20dを荷物Wの持ち手部Waに容易に入れ込むことができる。
次に前項[7]に記載の状態の後に、作業者が上昇操作スイッチ22を押し操作した状態について、図7に基づいて説明する。
前項[7]に記載の状態の後に、作業者は立ち上がることにより荷物Wを床から持ち上げるのであり、この状態において作業者が上昇操作スイッチ22を押し操作すると(ステップS1,S3)、第1クラッチ27が伝動状態に操作され、第2クラッチ29が遮断状態に操作され、ブレーキ30が制動状態に操作されて、駆動ユニット24により強い動力でワイヤ37が本体部1に巻き取り駆動される(ステップS5〜S8)(駆動ユニット24から脚作用部2に動力が与えられて、駆動ユニット24から荷物作用部3に動力が与えられない状態)。
作業者が立ち上がる際に、作業者の太腿部の移動軌跡と下アーム部10の移動軌跡とに差が発生した場合、作業者の太腿部が下がることに伴って、支持板11及び脚パッド12が下アーム部10の長手方向に沿って移動することにより、作業者の太腿部の移動軌跡と下アーム部10の移動軌跡との差が吸収されるのであり、作業者は無理なく立ち上がることができる。
この場合、図5及び図6に示すように、荷物Wが床から持ち上げられると、荷物Wの負荷W1が、ハンド部19(フック部20)の下側部20cの左右中央に掛かる。これに対して、ワイヤ18のフック部20(ハンド部19)への連結点が左右中央側に位置している。
これに加えて、ハンド部19(フック部20)の突出部20dにより、ハンド部19(フック部20)が荷物W(持ち手部Wa)から外れ難いものとなる。
これにより、荷物Wが床から持ち上げられた状態において、荷物Wの負荷W1により荷物Wが作業者に近づこうとするのであり、作業者は荷物Wを体に接触させて荷物Wの振ら付きを抑えながら立ち上がることができる。
次に前項[8]に記載の状態の後に、作業者が上昇操作スイッチ22を押し操作している状態について、図7に基づいて説明する。
下アーム部10が略真下に向く位置に位置することを検出する位置センサー(図示せず)が、支持部9に備えられている。
この場合、第2クラッチ29が遮断状態に操作されて(駆動ユニット24から荷物作用部3に動力が与えられない状態)、ブレーキ30が制動状態に操作されることにより、ハンド部19(荷物W)は下降することなく停止するのであり、駆動ユニット24に負荷は掛からない。
この場合、駆動ユニット24は荷物Wを支持しながら本体部1からワイヤ18を繰り出し駆動するので、ハンド部19(荷物W)が急速に下降するようなことはない(ステップS23)。
次に前項[9]に記載の状態の後の状態について、図7に基づいて説明する。
前項[9]に記載のように、作業者が立ち上がり、荷物Wを所望の位置に位置させた状態において、作業者は荷物Wを置くべき高い棚やトラックの荷台へ歩いて移動する。
この場合、第1クラッチ27が遮断状態に操作されることにより(駆動ユニット24から脚作用部2に動力が与えられない状態)、下アーム部10が自由状態となるので、作業者が歩いて移動する際に下アーム部10(脚作用部2)が作業者の脚部の動作の邪魔にならない。
前項[10]に記載のように、荷物Wを高い棚やトラックの荷台に置き、ハンド部19(フック部20)の下側部20c及び突出部20dを荷物Wの持ち手部Waから抜いて、ハンド部19を使用しない別の作業に移行する場合について説明する。
荷物Wを高い棚やトラックの荷台に置き、ハンド部19(フック部20)の下側部20c及び突出部20dを荷物Wの持ち手部Waから抜いて、作業者が下降操作スイッチ23の押し操作を止めて、作業者がハンド部19から手を離したとする。
上昇中のハンド部19が他物に引っ掛かるような状態が生じても、他物への引っ掛かりによる抵抗に駆動ユニット24の弱い動力が負けて、ハンド部19が停止することが予想されるので、上昇中のハンド部19が他物に引っ掛かって他物が破損するというような状態は生じ難い。
第1クラッチ27が遮断状態に操作されることにより(駆動ユニット24から脚作用部2に動力が与えられない状態)、下アーム部10が自由状態となるので、作業者が歩いて移動する際に下アーム部10(脚作用部2)が作業者の脚部の動作の邪魔にならない。
図5及び図6に示す構造に代えて、以下に示すように構成してもよい。
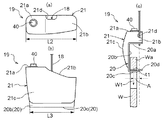
図9に示すように、右のハンド部19において、グリップ部21の第1上側部21aが横外側に延出されている。右のグリップ部21(右のハンド部19)の第1上側部21aに、押しボタン型式の第1上昇操作スイッチ38(外側)、及び第2上昇操作スイッチ39(上昇操作部に相当)(内側)が備えられている。
図8に示すように、左のグリップ部21(左のハンド部19)の第1上側部21aに、押しボタン型式の下降操作スイッチ40(下降操作部に相当)が備えられている。これ以外の右及び左のハンド部19の構造は図5及び図6と同じである。
これにより、下アーム部10が下方に操作されて、作業者の立ち上がりが補助されるのであり、第1上昇操作スイッチ38の押し操作を止めると(ステップS31)、駆動ユニット24が停止して、第1及び第2クラッチ27,29が遮断状態に操作され、ブレーキ30が制動状態に操作されて(ステップS38〜S41)、下アーム部10が停止する。
この場合、駆動ユニット24は荷物Wを支持しながら本体部1からワイヤ18を繰り出し駆動するので、ハンド部19(荷物W)が急速に下降するようなことはない(ステップS45)。
次に、第1及び第2上昇操作スイッチ38,39、下降操作スイッチ40のいずれかを押し操作することにより(ステップS58,S59,S60)、ステップS31に移行する。
前述の[発明を実施するための形態]の図7において、ステップS25〜S28にステップS101〜ステップS107を加えて、図12に示すように構成してもよい。
図12に示すように、荷物Wを保持していないハンド部19を上昇させる程度の弱い動力で、駆動ユニット24によりワイヤ18が本体部1に巻き取り駆動されて、ハンド部19が上昇し、ハンド部19が上アーム部14の上部(上プーリー16)に到達して、駆動ユニット24の弱い動力が負けて、ハンド部19が上アーム部14の上部(上プーリー16)で停止していたとする(ステップS25〜S28)(前項[11]参照)。
11のステップS56,S57にも適用できる。
この場合、図12に示す「上昇操作スイッチ22又は下降操作スイッチ23を押し操作すると図7に示すステップS1に戻る(ステップS104,S105)」という構成が、「第1及び第2上昇操作スイッチ38,39、下降操作スイッチ40のいずれかを押し操作することにより図10のステップS31に移行する」という構成となる。
前述の[発明を実施するための形態]の図5及び図6において、以下に示すように構成してもよい。(3−1)
左のグリップ部21(左のハンド部19)の第1上側部21aに上昇操作スイッチ22を備え、右のグリップ部21(右のハンド部19)の第1上側部21aに下降操作スイッチ23を備える。
右のグリップ部21(右のハンド部19)の第1上側部21a、又は左のグリップ部21(左のハンド部19)の第1上側部21aに、上昇操作スイッチ22及び下降操作スイッチ23の両方を備える。
右のフック部20(右のハンド部19)(又は左のフック部20(左のハンド部19))の下側部20cに上昇操作スイッチ22を下向きに備え、左のフック部20(左のハンド部19)(又は右のフック部20(右のハンド部19))の下側部20cに下降操作スイッチ23を下向きに備える。
右のフック部20(右のハンド部19)の下側部20c、又は左のフック部20(左のハンド部19)の下側部20cに、上昇操作スイッチ22及び下降操作スイッチ23の両方を下向きに備える。
前述の[発明の実施の第1別形態]の図8及び図9において、以下に示すように構成してもよい。(4−1)
左のグリップ部21(左のハンド部19)の第1上側部21aを横外側に延出して、左のグリップ部21(左のハンド部19)の第1上側部21aに、第1上昇操作スイッチ38(外側)、及び第2上昇操作スイッチ39(内側)を備え、右のグリップ部21(右のハンド部19)の第1上側部21aに下降操作スイッチ40を備える。
右のグリップ部21(右のハンド部19)(又は左のグリップ部21(左のハンド部19))の第1上側部21aにおいて、第1上昇操作スイッチ38を内側に備え、第2上昇操作スイッチ39を外側に備える。
右のフック部20(右のハンド部19)(又は左のフック部20(左のハンド部19))の下側部20cに第1及び第2上昇操作スイッチ38,39を下向きに備え、左のフック部20(左のハンド部19)(又は右のフック部20(右のハンド部19))の下側部20cに下降操作スイッチ40を下向きに備える。
右のフック部20(右のハンド部19)の下側部20c、又は左のフック部20(左のハンド部19)の下側部20cに、第1及び第2上昇操作スイッチ38,39、下降操作スイッチ40の全てを下向きに備える。
前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第4別形態]において、フック部20の上側部20aを廃止し、グリップ部21の第1及び第2上側部21a,21bを廃止して、ハンド部19(フック部20及びグリップ部21)を断面L字状に構成してもよい。
前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第5別形態]において、右及び左の下アーム部10を上方に付勢するバネ(図示せず)を備えてもよい。このように構成すれば、第1クラッチ27が遮断状態に操作されると、バネにより下アーム部10が上方に操作されて、ワイヤ37が本体部1から繰り出されるのであり、下アーム部10(脚作用部2)が作業者の脚部の動作の邪魔にならない。
前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第6別形態]において、図2に示す駆動ギヤ25と第1クラッチ27の入力ギヤ27aに代えて、ウォームギヤ機構(図示せず)を使用してもよい。このように構成することによって、下アーム部10(脚作用部2)に大きな動力を与えることができる。
前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第7別形態]において、図1に示す支持フレーム31の上部に左右方向の横軸芯(図示せず)周りに揺動自在に可動フレーム(図示せず)を備えて、可動フレームによりバッテリー33を、図1に示す第1位置、及び図1に示す第1位置から後方(図1の紙面左方)の第2位置に移動自在に構成してもよい。
前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第8別形態]において、駆動ユニット24によりワイヤ18を本体部1に巻き取り駆動、及び本体部1から繰り出し駆動するのではなく、上アーム部14の上部に固定されたワイヤ18を下方に延出して、ワイヤ18にハンド部19を連結し、本体部1に対して上アーム部14を上下に揺動駆動することにより、ハンド部19を上昇及び下降させるように構成してもよい。
下アーム部10(脚パッド12)が、作業者の太腿部ではなく作業者の下腿部(膝から下の部分)に作用することによって、作業者の立ち上がりを補助するように構成してもよい。
2個の駆動ユニット24に代えて、1個の駆動ユニット24により駆動ギヤ25を駆動するように構成してもよい。
2個の駆動ユニット24を備える場合、2個の駆動ユニット24の動力を2系統に分岐させて脚作用部2及び荷物作用部3に伝達するのではなく、一方の駆動ユニット24により脚作用部2を駆動し、他方の駆動ユニット24により荷物作用部3を駆動するように構成してもよい。
14 上アーム部
17 駆動装置
18 ワイヤ(長尺体)
19 ハンド部
22,39 上昇操作部
23,40 下降操作部
29 クラッチ
30 ブレーキ
32 制御装置
41 荷物センサー
W 荷物
Claims (6)
- 作業者の背中部に取り付けられる本体部と、前記本体部から作業者の右及び左の肩部を越えて前方に延出された右及び左の上アーム部と、前記右及び左の上アーム部から下方に延出された右及び左の長尺体と、前記右及び左の長尺体に連結され荷物を保持する右及び左のハンド部とが備えられたアシストスーツ。
- 作業者の背中部に取り付けられる本体部と、前記本体部から作業者の右及び左の肩部を越えて前方に延出された右及び左の上アーム部と、前記右及び左の上アーム部から下方に延出され且つ荷物の荷重を受ける長尺体とが備えられたアシストスーツ。
- 前記右及び左の上アーム部が互いに連結されている請求項1または2に記載のアシストスーツ。
- 前記本体部が右及び左の肩ベルトと作業者の腰に巻きつけられる腰ベルトとを有する請求項1から3のいずれか一項に記載のアシストスーツ。
- 前記本体部から延出されて作業者の脚に作用する脚作用部を備える請求項1から4のいずれか一項に記載のアシストスーツ。
- 前記脚作用部が、横軸芯周りに揺動可能な右及び左の下アーム部と作業者の太ももに作用する作用部とを有し、
前記右及び左の下アーム部を揺動駆動する駆動装置を備える請求項5に記載のアシストスーツ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017099054A JP6742274B2 (ja) | 2017-05-18 | 2017-05-18 | アシストスーツ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017099054A JP6742274B2 (ja) | 2017-05-18 | 2017-05-18 | アシストスーツ |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014058585A Division JP6148192B2 (ja) | 2014-03-20 | 2014-03-20 | アシストスーツ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017145143A true JP2017145143A (ja) | 2017-08-24 |
| JP6742274B2 JP6742274B2 (ja) | 2020-08-19 |
Family
ID=59682700
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017099054A Active JP6742274B2 (ja) | 2017-05-18 | 2017-05-18 | アシストスーツ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6742274B2 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4914826Y1 (ja) * | 1970-12-09 | 1974-04-12 | ||
| JPH03182497A (ja) * | 1989-12-12 | 1991-08-08 | Takenaka Komuten Co Ltd | 二叉ジブクレーン |
| JP2005230099A (ja) * | 2004-02-17 | 2005-09-02 | Yoshiyuki Yamaumi | 装着式動作補助装置、及び装着式動作補助装置における駆動源の制御方法、及びプログラム |
| JP2013052192A (ja) * | 2011-09-06 | 2013-03-21 | Wakayama Univ | パワーアシストロボット装置およびその制御方法 |
| JP2013531593A (ja) * | 2010-04-09 | 2013-08-08 | ロッキード・マーチン・コーポレイション | 携帯型荷吊り上げシステム |
| JP2013173190A (ja) * | 2012-02-23 | 2013-09-05 | Univ Of Tsukuba | 装着式動作補助装置 |
| US20130303950A1 (en) * | 2010-04-09 | 2013-11-14 | Ekso Bionics | Exoskeleton Load Handling System and Method of Use |
-
2017
- 2017-05-18 JP JP2017099054A patent/JP6742274B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4914826Y1 (ja) * | 1970-12-09 | 1974-04-12 | ||
| JPH03182497A (ja) * | 1989-12-12 | 1991-08-08 | Takenaka Komuten Co Ltd | 二叉ジブクレーン |
| JP2005230099A (ja) * | 2004-02-17 | 2005-09-02 | Yoshiyuki Yamaumi | 装着式動作補助装置、及び装着式動作補助装置における駆動源の制御方法、及びプログラム |
| JP2013531593A (ja) * | 2010-04-09 | 2013-08-08 | ロッキード・マーチン・コーポレイション | 携帯型荷吊り上げシステム |
| US20130303950A1 (en) * | 2010-04-09 | 2013-11-14 | Ekso Bionics | Exoskeleton Load Handling System and Method of Use |
| JP2013052192A (ja) * | 2011-09-06 | 2013-03-21 | Wakayama Univ | パワーアシストロボット装置およびその制御方法 |
| JP2013173190A (ja) * | 2012-02-23 | 2013-09-05 | Univ Of Tsukuba | 装着式動作補助装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6742274B2 (ja) | 2020-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6148192B2 (ja) | アシストスーツ | |
| JP6289955B2 (ja) | アシストスーツ | |
| JP6153881B2 (ja) | アシストスーツ | |
| KR102276029B1 (ko) | 어시스트 기구 | |
| JP6656096B2 (ja) | アシスト器具 | |
| JP6184355B2 (ja) | アシストスーツ | |
| JP2018002342A (ja) | アシスト器具 | |
| JP2017149585A (ja) | アシストスーツ | |
| WO2018003771A1 (ja) | アシストスーツ | |
| JP2017145143A (ja) | アシストスーツ | |
| JP6657036B2 (ja) | アシスト器具 | |
| JP6577072B2 (ja) | アシストスーツとアシストスーツに装備されるハンド部 | |
| JP2018002345A (ja) | アシスト器具 | |
| KR102450298B1 (ko) | 짐 보유 지지용의 핸드부 및 어시스트 기구 | |
| JP6745749B2 (ja) | 荷物保持用のハンド部 | |
| JP6840044B2 (ja) | 荷物保持用のハンド部 | |
| JP6899677B2 (ja) | 荷物保持用のハンド部 | |
| JP6758255B2 (ja) | 荷物保持用のハンド部 | |
| JP6834038B2 (ja) | アシスト器具 | |
| JP7292168B2 (ja) | 荷物保持装置 | |
| WO2018003868A1 (ja) | アシスト器具 | |
| JP6785694B2 (ja) | 荷物保持用のハンド部 | |
| JP2019025640A (ja) | 荷物保持用のハンド部 | |
| JP2019112192A (ja) | アシスト器具 | |
| JP2019026469A (ja) | 荷物保持用のハンド部 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170616 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180529 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180727 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190218 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190709 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191008 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20191010 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20191107 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20191213 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200422 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200728 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6742274 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |