JP2017074321A - 自律走行型掃除機および駆動装置付き車輪 - Google Patents
自律走行型掃除機および駆動装置付き車輪 Download PDFInfo
- Publication number
- JP2017074321A JP2017074321A JP2015204956A JP2015204956A JP2017074321A JP 2017074321 A JP2017074321 A JP 2017074321A JP 2015204956 A JP2015204956 A JP 2015204956A JP 2015204956 A JP2015204956 A JP 2015204956A JP 2017074321 A JP2017074321 A JP 2017074321A
- Authority
- JP
- Japan
- Prior art keywords
- gear
- wheel
- dust
- driving
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images























Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/009—Carrying-vehicles; Arrangements of trollies or wheels; Means for avoiding mechanical obstacles
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
Abstract
【解決手段】本発明の自律走行型掃除機Sは、車体Shを移動させる車輪2、3と、駆動源の入力により回転し、車体Shの荷重を支えるシャフト34と、シャフト34と車輪2、3との間に設けられる減速機構33、35、36と、シャフト34が支持され、シャフト34と車輪2、3との間に配置される第1の軸受38tと、シャフト34が支持され、第1の軸受38tより中央側に配置される第2の軸受34t1とを備えている。
【選択図】図15
Description
自律走行型掃除機は、左右一対の駆動用の車輪による自動走行が行われている。
例えば、1つのタイプは、車輪の減速構造はモータからギヤを介して減速し車輪を動作させる構造となっている。この際、減速比を稼ぐためにギヤを直列に配置しているため、車輪に対し前後方向へ長くなってしまう。このように、通常の平歯車を直列で並べる構造であると、トルクの大きいモータを使用し、少ない減速比とした際においてもギヤを多段にする必要が有り、車輪ユニットが大型化してしまう。車輪ユニットの大型化は本体の大型化へつながり、狭い箇所の清掃が難しくなることから望ましく無く、小型化する必要がある。
そこで、ギヤの配置の工夫及び整流子モータと同一直径で、整流子モータよりも大きいトルクが得られるアウターロータのブラシレスモータを用いた特許文献1に記載される構成が提案されている。
この構造の場合、ギヤの外径を大きく取ることができないため、一段当たりの減速比を大きく取ることができない。そのため、必要な減速比を大きく稼ぐにはギヤを上下に重ねて複数段に配置する必要があり、車輪のスラスト方向へ大型化してしまう。
また、減速機構のスラスト方向の長さを抑えると、減速比が小さくなるため、モータのトルクを大きくする必要があり、マグネットのグレードを上げる等コスト増につながる。
図1は、本発明の実施形態に係る自律走行型掃除機を左前方から見た斜視図である。なお、自律走行型掃除機Sが進行する向きのうち、サイドブラシ7を設けた側を前方、鉛直上向きを上方、駆動輪2、3が対向する方向であって駆動輪2側を左方、駆動輪3側を右方とする。すなわち図1等に示すように前後、上下、左右方向を定義する。
図2は、自律走行型掃除機の下面図である。
自律走行型掃除機Sは、外郭を成すケース1(1u、1s)と、下部の一対の駆動輪2、3(図2参照)および補助輪4とを備えている。また、自律走行型掃除機Sは、下部に回転ブラシ5、ガイドブラシ6およびサイドブラシ7を備え、周囲にセンサ8(8a、8b、8c)(図2、図3、図4参照)を備えている。
サイドブラシ7は、自律走行型掃除機Sの前方側、左右方向の外側に設けられており、図1の矢印α1のように、自律走行型掃除機Sの前方外側の領域を、左右方向外側から内側に向かう方向に掃引するよう回転して、床面上の塵埃を中央の回転ブラシ5(図2参照)側に集める。2つのガイドブラシ6は、それぞれ駆動輪2、3に対して左右方向内側に設けられており、サイドブラシ7で集められた塵埃を回転ブラシ5の幅内から外側に逃げないようにガイドする固定ブラシである。
回転ブラシ5は、自律走行型掃除機Sの駆動輪2、3に対して後方に設けられている。回転ブラシ5の左右側端部の左右方向位置は、それぞれ駆動輪2、3より内側、又はガイドブラシ6より内側にできる。
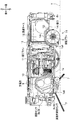
図4は、自律走行型掃除機のケースを外した内部構成を示す斜視図である。なお、図4は、集塵ケース12を外した状態を示す。
図5は、図4のB−B断面を示す斜視図である。
充電池9からの電力は、センサ8、駆動装置等の各モータ(21、21A、5m)、制御装置10、及び吸引ファン11等に供給される。
自律走行型掃除機Sは、制御装置10により統括的に制御される。
図4に示すように、吸引ファン11は下ケース1sの中心付近に配置されている。
吸引ファン11による空気の流路には、吸口14i(図3参照)から下流側に向かって順に、集塵ケース12、集塵フィルタ13、吸引ファン11、及び、排気口1s5(図2参照)が設けられている。排気口1s5は、回転ブラシ5の前方、駆動輪2、3の左右方向内側に設けられている。吸引ファン11(図3、図5参照)を駆動することで集塵ケース12内の空気を排気口1s5から外部に排出して負圧を発生させ、床面Yから吸口14iを介して塵埃を集塵ケース12内に吸い込む。
吸引ファン11は、下ケース1sとの間に弾性体(図示せず)を介して設置されている。弾性体を介在させることで、吸引ファン11の振動が減衰して下ケース1sに伝わりにくく、振動、騒音を低減できる。
ここで、自律走行型掃除機Sの大まかな動作について説明する。
自律走行型掃除機Sは、駆動輪2、3と補助輪4(図2参照)とにより自律的に移動され、前進、後進、左右旋回、超信地旋回等が可能である。そして、自律走行型掃除機Sは、サイドブラシ7、ガイドブラシ6で集塵して回転ブラシ5の周りに付着した塵埃を、吸口14iを介して、吸引ファン11の吸込み力により、集塵ケース12入口の吸込み口12iから集塵ケース12内に吸込み、出口の集塵フィルタ13により集塵ケース12内に滞留させる。
集塵ケース12内に塵埃が溜まると、適宜、利用者により集塵ケース12が本体部Shより取り出され、集塵フィルタ13が取り外され、塵埃が廃棄される。
(ケース1)
ケース1は、外郭を成し、走行モータ21、21A、回転ブラシモータ5m、吸引ファン11、集塵ケース12、制御装置10等を収容する筐体である。
ケース1は、上壁を成す上ケース1uと、底壁(及び一部の側壁)を成す下ケース1s(図2参照)と、ケース1の前下部に設置されるバンパ1bとを備えている。
図2に示すように、下ケース1sには、車輪ユニット収容部1s1とサイドブラシ取付部1s3と孔部1s4と排気口1s5と電池収容部1s6とが形成されている。
車輪ユニット収容部1s1には、駆動輪2、3が支持、駆動される車輪ユニット20、30が収容される。
孔部1s4には、吸込部14が設けられる。排気口1s5は、下ケース1sの中央付近であり、左右の車輪ユニット収容部1s1に挟まれた位置に複数形成される。
電池収容部1s6には、充電池9が収納される。電池収容部1s6の左右には、サイドブラシ7を取り付けるサイドブラシ取付部1s3が形成されている。
下ケース1sの後側、つまり、排気口1s5、及び、車輪ユニット収容部1s1の後側に吸込部14(図2参照)が設けられる孔部1s4が形成されている。
図3に示す吸込部14は、吸引ファン11で吸引する塵埃を含む空気の流路の一部を形成する。吸込部14から下流の流路は、順に、集塵ケース12、集塵フィルタ13、吸引ファン11及び、排気口1s5(図2参照)に連通する。
吸込部14には、塵埃を掻き込む回転ブラシ5が配置され、回転ブラシ5を駆動する回転ブラシモータ5m(図4参照)が固定される。吸込部14は、回転ブラシ5で掻き込まれた塵埃を集塵ケース12に吸込む吸口14iが形成されている。吸口14iは、回転ブラシ5(図2参照)と略同じ長さを有して形成されている。
図3に示すように、吸口14iは、集塵ケース12の開口の吸込み口12iと連通し、塵埃が吸口14i、吸込み口12iを介して集塵ケース12に集められる。
図3に示す集塵ケース12は、床面Yから、吸込部14に形成される吸口14iを介して吸いこまれた塵埃を回収する容器である。集塵ケース12は、回転ブラシ5と略同じ左右方向寸法を有している。
集塵ケース12は、回収した塵埃を収容する本体と、回収した塵埃を取出し可能とする蓋と、本体上部の折り畳み可能な取っ手とを備える。集塵ケース12の本体は、下面が吸込部14の上部の形状に対応する形状であり、吸口14iに対向して略同じ開口形状の吸込み口12iを備えている。蓋は、吸引ファン11の吸引口に対向し、前記した集塵フィルタ13を備えている。
図4に示すバンパセンサ8aは、バンパ1b(図1参照)が障害物と接触したことをバンパ1bの後退で検知するセンサ、例えばフォトカプラである。バンパ1bに障害物が接触した場合、バンパ1bの後退でセンサ光が遮られる。この変化に応じた検知信号が制御装置10に出力される。
測距センサ8bは、赤外線を発光させる発光部(図示せず)と、赤外線が障害物で反射して戻ってくる反射光を受光する受光部(図示せず)とを有している。当該受光部によって検出される反射光の強さに基づき、障害物までの距離が算出される。なお、バンパ1bのうち少なくとも測距センサ8bの近傍は、赤外線を透過させる樹脂又はガラスで形成されている。
ちなみに、測距センサ8bとして他の種類のセンサ(例えば、超音波センサ、可視光センサ)を用いてもよい。
図3に示す制御装置10は、例えばマイコン(Microcomputer)と周辺回路とが基板に実装され、構成される。マイコンは、ROM(Read Only Memory)に記憶された制御プログラムを読み出してRAM(Random Access Memory)に展開し、CPU(Central Processing Unit)が実行することで各種処理が実現される。周辺回路は、A/D・D/A変換器、各種モータの駆動回路、センサ回路、充電池9の充電回路等を有している。
図2に示す補助輪4は、下ケース1sの前方の左右方向の中央に設けられている。補助輪4は、駆動輪2、3とともに本体部Shを所定高さで保って自律走行型掃除機Sを円滑に移動させるための車輪である。補助輪4は、本体部Shの移動に伴い床面Yとの間で生じる摩擦力によって従動回転し、さらに向きが水平方向に360°回転するように、下ケース1sに軸支されている。
次に、実施形態1の自律走行型掃除機Sの駆動輪2、3を含む車輪アッセンブリ20、30について説明する。
なお、駆動輪2を含む車輪アッセンブリ20と駆動輪3を含む車輪アッセンブリ30とは、自律走行型掃除機Sの左右の中央面に対して面対称として同様な構成にできるから、車輪アッセンブリ20の構成についての説明は、車輪アッセンブリ30と同様にできるため、車輪アッセンブリ30の説明としては繰り返さない。
図8は、車輪アッセンブリの分解斜視図であり、図9は、図8の反対方向から見た車輪アッセンブリの分解斜視図である。図10は、遊星ギヤアッセンブリの分解斜視図である。
具体的には、図7Aに示すように、駆動輪2と同軸上にモータ21が配置され、図7Bに示すように、モータ21の駆動軸(入力軸)には太陽歯車22が圧入等で固定されている。モータ21は、モータブラケット21bに固定されている。
3つの遊星ギヤ23の外周の歯23hに噛み合う内歯24hを有する内歯歯車の第1アウターギヤ24が、図1に例示する本体部Sh等の非回転部に固定されている。
さらに、図7A、図8に示すように、3つの遊星ギヤ23の外周の歯に噛み合って、内歯25hを有する内歯歯車の第2アウターギヤ25が、回転自在に設けられている。第2アウターギヤ25は、駆動輪2(図6参照)が固定され、出力軸を構成している。
上述したことから、モータ21と駆動輪2との間の減速機構は、太陽歯車22、3つの遊星ギヤ23、第1アウターギヤ24、および第2アウターギヤ25を有して構成されている。
図8に示すように、円板状の底板2sには、内側に第2アウターギヤ25を固定するためのボス2s1が3箇所形成されている。各ボス2s1には、第2アウターギヤ25を固定するねじn1が挿通する孔2s2が貫設されている。
太陽歯車22の歯数z1、遊星ギヤ23の歯数z2、固定の第1アウターギヤ24の歯数z3、回転自在な第2アウターギヤ25の歯数z4とすると、入力のモータ21から、駆動輪2が固定される出力の第2アウターギヤ25までの減速比Nは、以下のように求められる。
ここで、遊星ギヤ23の数量をnとし、mを1、2、3、……… の自然数とすると、太陽歯車22の歯数z1は、遊星ギヤ23の数量分の歯数を持つので、次式(1)で表される。
z1=n×m (1)
z3=n×m (2)
回転自在な第2アウターギヤ25の歯数z4は、次式(3)とする。
z4=z3+(n×m) (3)
減速比N1は、次式(4)で表される。
N1= z4×(z3+z1)÷(z1×(z4−z3)) (4)
こうして、車輪アッセンブリ20の構成とすることで、減速比N1=約40〜約80を実現することができる。
従って、駆動輪2、3の減速機構が、駆動輪2、3のスラスト方向(軸方向)および直径方向共に小型化が可能となる。
駆動輪2、3が地面から受ける外力がギヤ部(22、23、24、25)へ加わると、バックラッシュ等が変化し、騒音やエネルギ伝達のロスが大きくなるといった問題が発生する可能性がある。
そこで、図7A、図7Bに示すように、駆動輪2とハウジング26との間に緩衝機構Kが設けられている。
緩衝機構Kは、ハウジング26に支持されるピン26pとピン26pに回転自在に挿通される円筒状のローラ26rとで構成される。
図8、9に示すように、ハウジング26は、浅い深さをもつ有底円筒状の樹脂製の部品である。ハウジング26は、円板状の底板26aと円筒側板26bとフランジ板26cとを有している。
フランジ板26cには、駆動輪2の軸方向にステンレス等のピン26pが固定されている。ピン26pには、ローラ26rが回転自在に挿通されている。ローラ27rは例えばPOM(Polyoxymethylene, Polyacetal)等の樹脂が使用されている。図7Aに示す位置に、ローラ26rを配置し、ピン26pをローラ26rに通した後、ピン26pをフランジ板26cと円筒側板26bとに圧入等で固定する。これにより、ローラ26rがピン26pに回転自在に設けられる。
1.モータ21を含めた駆動輪2、3の減速機構をそれぞれほぼ駆動輪2、3の外径寸法s1および幅寸法s2に納めつつも、自律走行型掃除機Sに必要な減速比N1=約40〜約80、好ましくは70〜80を実現することができる。
以上のことから、駆動輪2、3の減速機構を小型化することができる。つまり、減速比N1を大きくとりながらも、駆動輪2、3の減速機構の小型化が可能である。
従って、本減速機構では、発生応力が低減され、機械的信頼性が高い。
従って、減速機構(22、23、24、25)の信頼性が高く、長寿命化が可能である。
なお、前記実施形態1では、遊星ギヤ23を3つ用いる場合を例示したが、遊星ギヤ23の数は複数であれば、その数は適宜選択できる。
次に、実施形態2の自律走行型掃除機Sの駆動輪2、3をそれぞれ含む車輪アッセンブリ20A、30Aについて説明する。
なお、駆動輪2を含む車輪アッセンブリ20Aと駆動輪3を含む車輪アッセンブリ30Aとは、自律走行型掃除機Sの左右の中央面に対して面対称として同様な構成にできるから、車輪アッセンブリ20Aの構成についての説明は、車輪アッセンブリ30Aについての説明と同様にできるため、車輪アッセンブリ30Aとしての説明は繰り返さない。
図13は、実施形態2の車輪アッセンブリの分解斜視図であり、図14は、図13の反対方向から見た車輪アッセンブリの分解斜視図である。
図15は、図12のD−D断面図であり、図16は、ピニオンギヤ、歯車が見える断面で切断した断面図である。
図16に示すように、駆動輪2の回転軸(カムシャフト34の位置)に偏芯させてモータ31(回転軸31j)が設けられている。
図12に示すように、モータ31は、第1ハウジングhaに固定されている。第1ハウジングhaは、駆動輪2の構造部材を成す第2ハウジングhbに固定されている。
詳細には、図13に示すように、第1ハウジングhaには、ねじ挿通孔ha1が形成される一方、第2ハウジングhbには雌ねじhb1が螺刻されている。不図示のねじを第1ハウジングhaのねじ挿通孔ha1を挿通させ、第2ハウジングhbの雌ねじhb1に螺着することで、第1ハウジングhaが第2ハウジングhbに固定される。
また、ピニオンギヤ32に噛み合って、歯車33がピニオンギヤ32より多い歯数をもって設けられている(図16参照)。
歯車33の回転軸には、カムシャフト34(図13、図14等参照)が固定されている。
これにより、モータ31の出力が、ピニオンギヤ32、歯車33を介して、減速してカムシャフト34に伝えられる。
カムシャフト34の第一中心軸34aは、駆動輪2の回転軸と同軸であって、歯車33の中心軸に周り止めの矩形断面をもって形成されている。第一中心軸34aは、歯車33の中心軸に嵌入され固定される。
第二カム部34cは、第一中心軸34aに偏芯し、かつ第一中心軸34aを中心に第一カム部34bに対して約180度位相をずらして形成される円柱形状の軸である。
第二中心軸34dは、第一中心軸34aと同様、駆動輪2の回転軸と同軸の円柱形状の軸である。第二中心軸34dは、駆動輪2の中心軸に挿通される軸受38tに回転自在に軸支持されている。
カムシャフト34の第一カム部34bには、軸受34t1を介して、トロコイド曲線を用いて歯35hが形成される遊星ギヤ35が配置されている。
回転板38には駆動輪2が固定されている。回転板38を回転駆動することで、駆動輪2が回転駆動される。
図15に示すように、回転板38は軸受39に内装されている(図13、図14参照)。軸受39は、スベリ軸受でもよいし、玉軸受でもよい。一方、回転板38は軸受38tを介してカムシャフト34と連結されている。
カムシャフト34の第二カム部34cには、軸受34t2を介して、トロコイド曲線を用いて歯36hが形成される遊星ギヤ36が配置されている。遊星ギヤ35と遊星ギヤ36とは同じ形状の歯車であり、第一カム部34bと第二カム部34cとに軸支持することで、位相を180度ずらして取付けられている。
遊星ギヤ35、36の各歯35h、36hは、それぞれアウターギヤ37の歯37hと噛み合っている。アウターギヤ37は固定の歯車である。
遊星ギヤ35、36の各歯35h、36hは、それぞれトロコイド曲線を用いて形成しているため、これと噛み合うアウターギヤ37は、円筒状の歯37hに形成されている。なお、通常のインボリュート歯車を遊星ギヤ35、36として用いると、インボリュート干渉が発生するため、トロコイド曲線の歯35h、36hと円筒状の歯37hの形状としている。
図18に示すように、遊星ギヤ35の円柱状凹部35aと遊星ギヤ36の挿通孔36aには、回転板38に固定されるピン38pに回転自在に軸支持されるローラ38rが遊嵌されている。
上記構成により、遊星ギヤ35、36が、アウターギヤ37の円筒状の歯37hとの噛み合いにより回転した際には、円柱状凹部35a、挿通孔36aに貫通したローラ38rを介して、回転板38がカムシャフト34の第二中心軸34d周りに回転することとなる。
駆動輪2に貫設される3つの貫通孔2s4にねじn2をそれぞれ挿通させて回転板38の雌ねじ38nに螺着することで、駆動輪2が回転板38に固定されている。
図14に示すように、円板状の底板2sには、上述の3つの貫通孔2s4が貫設されている。
具体的には、遊星ギヤ35、36の自転の回転数を、円柱状凹部35a、挿通孔36aに貫通したローラ38rを介して、回転板38を用いて取り出す構造となっている。
ここで、ピニオンギヤ32の歯数をz1、歯車33の歯数をz2、遊星ギヤ35、36の歯数をz3、アウターギヤの歯数をz4とすると、減速比N2は、次式(5)で表される。
N2=(z2÷z1)×(1÷((z4−z3)÷z3)) (5)
減速比N2A=1÷((z4−z3)÷z3)
つまり、シャフトであるカムシャフト34の回転速度と駆動輪2(回転板38)の回転速度とは異なる。
1.歯車33と遊星ギヤ35および遊星ギヤ35とアウターギヤ37との二段の減速のみで、高い減速比(例えば、減速比Nを約40〜約80、好ましくは65〜80)を得ることができる。そのため、高効率の減速機構を駆動輪2、3の内部へ配置することが可能となる。
また、車輪ハブ(32)が固定される車輪側回転部材(28)は、軸受(64)の外輪で支持されている。軸受(64)の内輪は、減衰部入力軸(25)の一端部が支持されている。減衰部入力軸(25)の他部は、転がり軸受(62)を介してポンプケーシング(22p)に回転自在に支持されている。そのため、駆動輪に加わる荷重は、車輪ハブ軸受(33)のみならず、車輪側回転部材(28)、軸受(64)、減衰部入力軸(25)、転がり軸受(62)等を介してポンプケーシング(22p)が受けている。そのため、駆動輪に加わる荷重は、機構部で受けることとなり、機構部の信頼性が本願実施形態2(本願発明)より低い。
カムシャフト34が支持されカムシャフト34と車輪の駆動輪2との間に配置される第1の軸受38tと、カムシャフト34が支持され、第1の軸受38tより中央側に配置される第2の軸受34t1とを備えることで、駆動輪2を駆動する機構を小型にできる。
これに対して、本実施形態2(本発明)では、軸のカムシャフト34と駆動輪2(回転板38)とが独立して回転する構成である。
以上のことから、駆動輪2(3)の減速機構をコンパクトにできる。
次に、実施形態3の自律走行型掃除機Sの駆動輪2、3をそれぞれ含む車輪アッセンブリ20B、30Bについて説明する。
実施形態3の車輪アッセンブリ20B、30Bは、ウォームギヤと平歯車とを使用した減速機構としている。
なお、駆動輪2を含む車輪アッセンブリ20Bと駆動輪3を含む車輪アッセンブリ30Bとは、自律走行型掃除機Sの左右の中央面に対して面対称であり同様な構成にできるから、車輪アッセンブリ20Bの構成についての説明は、車輪アッセンブリ30Bについても同様に行えるため、車輪アッセンブリ30Bの説明としては繰り返さない。
図21は、実施形態3の駆動輪を外して車輪アッセンブリの内部を図20の反対方向の上後方から見た斜視図である。
シャフト44の他方側には第2のウォームギヤ45が固定されている。
第2のウォームホイール46の同軸には、第1の平歯車47が設けられている。
第1の平歯車47には、駆動輪2の同軸に設けられる第2の平歯車48の歯48hが噛み合っている。第2の平歯車48には、駆動輪2(図20参照)が固定されている。
これにより、モータ41の回転が第1のウォームギヤ42を介して、第1のウォームホイール43に伝達される。
第2のウォームギヤ45は、第2のウォームホイール46へ回転を伝え、第2のウォームホイール46と同軸に固定される第1の平歯車47を介して、駆動輪2と同軸上に設けられる第2の平歯車48に回転が伝えられる。第2の平歯車48と同軸に駆動輪2が固定されているので、モータ41の回転が駆動輪2に伝達される。
なお、駆動輪2の軸(図示せず)を平歯車48とは別体に設けて、当該軸をハウジングに固定される軸受に回転自在に支持し、駆動輪2の振動が平歯車48に伝達されないように構成してもよい。
駆動輪2とモータ41との間の減速機構の噛み合い状態は、図22に示すようになっている。なお、図22は、駆動輪とモータとの間の減速機構の噛み合い状態を示す縦断面模式図である。
N3=(z2÷z1)×(z4÷z3)×(z6÷z5) (6)
ウォームギヤ(42、45)を用いることで、回転半径が小さいまま高減速が可能となるため、騒音・振動の面で有利となる。また、ウォームギヤ(42、45)が小さいため、小型化が可能で有り、駆動輪2、3の内部で減速機構を完結することが可能となる。
1.第1のウォームギヤ42と第2のウォームギヤ45の2つのウォームギヤを用いることで、減速比をかせぐことができる。
前記したように、従来、減速機構の歯車に細かい歯を使いたい要求があったが、減速比が大きくなるので、歯幅を大きくする必要があった。そこで、トルクに耐えられるように歯を大きくすると、減速機構が大きくなるという問題があった。
本発明により、この問題が解消した。
なお、本発明は前記実施形態1〜3の構成に限られることなく、添付の特許請求の範囲内で様々な変形形態、具体的形態が可能である。
21、21A、31、41、41A モータ(走行モータ)
2B、3B 軸ブッシュ(車輪固定部)
2i、3i 円筒面(駆動輪の内側の外周面)
2o、3o 外筒面(駆駆動輪の外側の外周面)
5 回転ブラシ
5m 回転ブラシモータ(モータ)
8 センサ(障害物検知手段)
8a バンパセンサ(障害物検知手段)
8b 測距センサ(障害物検知手段)
8c 床面用測距センサ(障害物検知手段)
9 充電池
11 吸引ファン
12 集塵ケース
14i 吸口
20、20A、30A、20B、30B 車輪アッセンブリ(駆動装置付き車輪)
22 太陽歯車(減速機構)
23 遊星ギヤ(応力抑制手段、ギヤ、減速機構)
24 第1アウターギヤ(第1のアウターギヤ、減速機構)
24h 内歯
25 第2アウターギヤ(第2のアウターギヤ、減速機構)
25h 内歯
32 ピニオンギヤ
33 歯車(第1の歯車、減速機構)
34 カムシャフト(支持部材、シャフト)
34b 第一カム部(カム部)
34c 第二カム部(カム部)
34s 外周面の径寸法(外径寸法)
34t1 軸受(第2の軸受)
35 遊星ギヤ(応力抑制手段、ギヤ、第1の遊星歯車、減速機構)
36 遊星ギヤ(応力抑制手段、ギヤ、第2の遊星歯車、減速機構)
37 アウターギヤ(減速機構)
38t 軸受(第1の軸受)
38t1 外周面の径寸法(外径寸法)
39 軸受(第3の軸受)
39s 内周面の径寸法(内径寸法)
42 第1のウォームギヤ(応力抑制手段、ウォームギヤ、ギヤ)
43 第1のウォームホイール
44 シャフト(支持部材)
45 第2のウォームギヤ(応力抑制手段、ウォームギヤ、ギヤ)
46 第2のウォームホイール
47 第1の平歯車(第1の歯車)
48 第2の平歯車(第2の歯車)
s1、s3、s5 外径寸法(駆動輪の外径)
s2、s4、s6 幅寸法
S 自律走行型掃除機
Sh 本体部(非回転部、車体)
Claims (14)
- 車体を移動させる車輪と、
駆動源の入力により回転し、前記車体の荷重を支えるシャフトと、
前記シャフトと前記車輪との間に設けられる減速機構と、
前記シャフトが支持され、前記シャフトと前記車輪との間に配置される第1の軸受と、
前記シャフトが支持され、前記第1の軸受より中央側に配置される第2の軸受とを
備えることを特徴とする駆動装置付き車輪。 - 車体を移動させる車輪と、
駆動源の入力により回転し、前記車体の荷重を支えるシャフトと、
前記シャフトと前記車輪との間に設けられる減速機構と、
前記シャフトが支持され、前記シャフトと前記車輪との間に配置される第1の軸受と、
前記シャフトが支持され、前記第1の軸受より中央側に配置される第2の軸受と、
前記車輪を前記車体に対して回転自在に支持する第3の軸受とを備え、
前記第3の軸受の内径寸法は、前記第1の軸受または前記第2の軸受の何れか一方の外径寸法より大きい
ことを特徴とする駆動装置付き車輪。 - 前記第3の軸受は、前記第1の軸受または前記第2の軸受の何れか一方の外径寸法より大きく、当該何れか一方の軸受と軸方向に重なって設けられる
ことを特徴とする請求項2に記載の駆動装置付き車輪。 - 前記シャフトの回転速度と前記車輪の回転速度とは異なる
ことを特徴とする請求項1または請求項2に記載の駆動装置付き車輪。 - 前記シャフトの回転方向と前記車輪の回転方向とは異なる
ことを特徴とする請求項1または請求項2に記載の駆動装置付き車輪。 - 請求項1または請求項2に記載の駆動装置付き車輪を備える自律走行型掃除機。
- 各走行モータの駆動でそれぞれ回動される駆動輪と、
前記走行モータの駆動を減速して前記駆動輪に伝える減速機構と、
塵埃が回収される吸口と、
前記塵埃を含む空気を前記吸口から吸引する吸引ファンと、
モータにより回転駆動して前記塵埃を掻き込む回転ブラシと、
前記塵埃が集められる集塵ケースと、
障害物を検知する障害物検知手段と、
電源を供給する充電池とを備え、
前記減速機構は、前記駆動輪の回転軸方向に見て前記駆動輪の外径寸法以下の領域内に配置され、
前後方向に見て、前記駆動輪の幅寸法の領域内に前記減速機構を構成する各ギヤの一部または全部が位置している
ことを特徴とする自律走行型掃除機。 - 前記減速機構は、
太陽歯車と、
前記太陽歯車に噛み合う複数の遊星歯車と、
前記遊星歯車と内歯で噛み合い、非回転部に対して固定される第1のアウターギヤと、
前記第1のアウターギヤと歯数が異なり、前記遊星歯車と内歯で噛み合い、前記駆動輪が固定される第2のアウターギヤとを有する
ことを特徴とする請求項7に記載の自律走行型掃除機。 - 前記減速機構は、
ピニオンギヤと、
前記ピニオンギヤに噛み合う第1の歯車と、
前記第1の歯車の回転軸の位置に固定され、前記回転軸から偏芯したカム部を有するカムシャフトと、
前記カム部に回転自在に支持される遊星歯車と、
前記遊星歯車と噛み合い、本体部に対して固定されるアウターギヤとを有し、
前記駆動輪は、前記遊星歯車の自転により回転する
ことを特徴とする請求項7に記載の自律走行型掃除機。 - 前記カム部は、第1のカム部と前記第1のカム部の偏芯と反対方向に偏芯する第2のカム部とを有し、
前記遊星歯車は、前記第1のカム部に回転自在に支持される第1の遊星歯車と、前記第2のカム部に回転自在に支持される第2の遊星歯車である
ことを特徴とする請求項9に記載の自律走行型掃除機。 - 前記減速機構は、
第1のウォームギヤと、
前記第1のウォームギヤと噛み合う第1のウォームホイールと、
前記第1のウォームホイールが一部に固定される支持部材と、
前記支持部材の他部に固定される第2のウォームギヤと、
前記第2のウォームギヤと噛み合う第2のウォームホイールと、
前記第2のウォームホイールとともに回転する第1の歯車と、
前記第1の歯車に噛み合って回転する第2の歯車とを有する
ことを特徴とする請求項7に記載の自律走行型掃除機。 - 各走行モータの駆動でそれぞれ回動される駆動輪と、
前記走行モータの駆動を減速して前記駆動輪に伝える減速機構と、
塵埃が回収される吸口と、
前記塵埃を含む空気を前記吸口から吸引する吸引ファンと、
モータにより回転駆動して前記塵埃を掻き込む回転ブラシと、
前記塵埃が集められる集塵ケースと、
障害物を検知する障害物検知手段と、
電源を供給する充電池とを備え、
前記減速機構は、
太陽歯車と、
前記太陽歯車に噛み合う複数の遊星歯車と、
前記遊星歯車と内歯で噛み合い、本体部に対して固定される第1のアウターギヤと、
前記第1のアウターギヤと歯数が異なり、前記遊星歯車と内歯で噛み合い、前記駆動輪が固定される第2のアウターギヤとを有する
ことを特徴とする自律走行型掃除機。 - 各走行モータの駆動でそれぞれ回動される駆動輪と、
前記走行モータの駆動を減速して前記駆動輪に伝える減速機構と、
塵埃が回収される吸口と、
前記塵埃を含む空気を前記吸口から吸引する吸引ファンと、
モータにより回転駆動して前記塵埃を掻き込む回転ブラシと、
前記塵埃が集められる集塵ケースと、
障害物を検知する障害物検知手段と、
電源を供給する充電池とを備え、
前記減速機構は、
ピニオンギヤと、
前記ピニオンギヤに噛み合う第1の歯車と、
前記第1の歯車の回転軸の位置に固定され、前記回転軸から偏芯したカム部を有するカムシャフトと、
前記カム部に回転自在に支持される遊星歯車と、
前記遊星歯車と噛み合い、本体部に対して固定されるアウターギヤとを有し、
前記駆動輪は、前記遊星歯車の自転により回転する
ことを特徴とする自律走行型掃除機。 - 各走行モータの駆動でそれぞれ回動される駆動輪と、
前記走行モータの駆動を減速して前記駆動輪に伝える減速機構と、
塵埃が回収される吸口と、
前記塵埃を含む空気を前記吸口から吸引する吸引ファンと、
モータにより回転駆動して前記塵埃を掻き込む回転ブラシと、
前記塵埃が集められる集塵ケースと、
障害物を検知する障害物検知手段と、
電源を供給する充電池とを備え、
前記減速機構は、
第1のウォームギヤと、
前記第1のウォームギヤと噛み合う第1のウォームホイールと、
前記第1のウォームホイールが一部に固定される支持部材と、
前記支持部材の他部に固定される第2のウォームギヤと、
前記第2のウォームギヤと噛み合う第2のウォームホイールと、
前記第2のウォームホイールとともに回転する第1の歯車と、
前記第1の歯車に噛み合って回転する第2の歯車とを有する
ことを特徴とする自律走行型掃除機。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015204956A JP2017074321A (ja) | 2015-10-16 | 2015-10-16 | 自律走行型掃除機および駆動装置付き車輪 |
| CN201610842156.3A CN106580186B (zh) | 2015-10-16 | 2016-09-22 | 自主行驶型吸尘器以及带驱动装置的滚轮 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015204956A JP2017074321A (ja) | 2015-10-16 | 2015-10-16 | 自律走行型掃除機および駆動装置付き車輪 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019164239A Division JP6835923B2 (ja) | 2019-09-10 | 2019-09-10 | 自律走行型掃除機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017074321A true JP2017074321A (ja) | 2017-04-20 |
| JP2017074321A5 JP2017074321A5 (ja) | 2018-11-08 |
Family
ID=58549464
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015204956A Pending JP2017074321A (ja) | 2015-10-16 | 2015-10-16 | 自律走行型掃除機および駆動装置付き車輪 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2017074321A (ja) |
| CN (1) | CN106580186B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019088118A (ja) * | 2017-11-08 | 2019-06-06 | 日立アプライアンス株式会社 | 自律走行型掃除機および駆動装置付き車輪 |
| JP2021164549A (ja) * | 2020-04-07 | 2021-10-14 | 日立グローバルライフソリューションズ株式会社 | 駆動装置付き車輪を有する自律走行型掃除機 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113229745B (zh) * | 2021-05-10 | 2022-03-25 | 江苏美的清洁电器股份有限公司 | 用于吸尘器的地刷总成和吸尘器 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050055792A1 (en) * | 2003-09-15 | 2005-03-17 | David Kisela | Autonomous vacuum cleaner |
| JP2010091097A (ja) * | 2008-10-10 | 2010-04-22 | Kitz Corp | バルブ用アクチュエータ |
| JP2012205441A (ja) * | 2011-03-28 | 2012-10-22 | Minebea Co Ltd | 減速機付きモータ装置 |
| WO2013008694A1 (ja) * | 2011-07-08 | 2013-01-17 | 日本電産株式会社 | ホイールユニット |
| JP2013232156A (ja) * | 2012-05-01 | 2013-11-14 | Sharp Corp | 自走式電子機器 |
| JP2015140857A (ja) * | 2014-01-29 | 2015-08-03 | Ntn株式会社 | インホイールモータ駆動装置 |
| JP2015161385A (ja) * | 2014-02-28 | 2015-09-07 | 日本電産コパル株式会社 | ギヤードモータ |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5312132B2 (ja) * | 2009-03-25 | 2013-10-09 | Ntn株式会社 | インホイールモータ駆動装置 |
-
2015
- 2015-10-16 JP JP2015204956A patent/JP2017074321A/ja active Pending
-
2016
- 2016-09-22 CN CN201610842156.3A patent/CN106580186B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050055792A1 (en) * | 2003-09-15 | 2005-03-17 | David Kisela | Autonomous vacuum cleaner |
| JP2010091097A (ja) * | 2008-10-10 | 2010-04-22 | Kitz Corp | バルブ用アクチュエータ |
| JP2012205441A (ja) * | 2011-03-28 | 2012-10-22 | Minebea Co Ltd | 減速機付きモータ装置 |
| WO2013008694A1 (ja) * | 2011-07-08 | 2013-01-17 | 日本電産株式会社 | ホイールユニット |
| JP2013232156A (ja) * | 2012-05-01 | 2013-11-14 | Sharp Corp | 自走式電子機器 |
| JP2015140857A (ja) * | 2014-01-29 | 2015-08-03 | Ntn株式会社 | インホイールモータ駆動装置 |
| JP2015161385A (ja) * | 2014-02-28 | 2015-09-07 | 日本電産コパル株式会社 | ギヤードモータ |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019088118A (ja) * | 2017-11-08 | 2019-06-06 | 日立アプライアンス株式会社 | 自律走行型掃除機および駆動装置付き車輪 |
| JP2021164549A (ja) * | 2020-04-07 | 2021-10-14 | 日立グローバルライフソリューションズ株式会社 | 駆動装置付き車輪を有する自律走行型掃除機 |
| JP7319221B2 (ja) | 2020-04-07 | 2023-08-01 | 日立グローバルライフソリューションズ株式会社 | 駆動装置付き車輪を有する自律走行型掃除機 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106580186A (zh) | 2017-04-26 |
| CN106580186B (zh) | 2019-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6308234B2 (ja) | ホイールユニット | |
| US10398275B2 (en) | Robot cleaner | |
| JP6880742B2 (ja) | ホイール駆動装置、および、ホイール駆動装置を有する掃除ロボット | |
| JP2017074321A (ja) | 自律走行型掃除機および駆動装置付き車輪 | |
| KR102193998B1 (ko) | 로봇 청소용 걸레 어셈블리 및 이를 구비한 로봇 청소기 | |
| TWI603704B (zh) | 自動式清掃機 | |
| TWI694807B (zh) | 自律行走式掃地機器人及附驅動裝置的車輪 | |
| CN108201413A (zh) | 吸尘器地刷以及吸尘器 | |
| JP2017144007A (ja) | 電気掃除機 | |
| JP6835923B2 (ja) | 自律走行型掃除機 | |
| KR101688143B1 (ko) | 로봇청소기 | |
| KR20090007907A (ko) | 로봇 청소기 | |
| JP2017074321A5 (ja) | ||
| KR101450972B1 (ko) | 자동 청소기 | |
| JP6556016B2 (ja) | 自律走行型掃除機 | |
| CN219835580U (zh) | 清洁组件及清洁机器人 | |
| JP2017024655A (ja) | インホイールモータ駆動装置 | |
| CN208659159U (zh) | 吸尘器地刷以及吸尘器 | |
| CN216702461U (zh) | 滚刷、地刷组件及洗地机 | |
| JP7319221B2 (ja) | 駆動装置付き車輪を有する自律走行型掃除機 | |
| CN214367544U (zh) | 一种含偏心轴承销轴式输出的零背隙少齿差行星减速器 | |
| JP2004032840A (ja) | 車輪の駆動装置及びゴルフカー | |
| JP2005185929A (ja) | 厨芥処理機 | |
| JP2012176809A (ja) | 塵芥収集車及びそれに用いられる駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180927 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190306 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190611 |