JP2017071052A - 電動インパルススクリュードライバ - Google Patents
電動インパルススクリュードライバ Download PDFInfo
- Publication number
- JP2017071052A JP2017071052A JP2016217493A JP2016217493A JP2017071052A JP 2017071052 A JP2017071052 A JP 2017071052A JP 2016217493 A JP2016217493 A JP 2016217493A JP 2016217493 A JP2016217493 A JP 2016217493A JP 2017071052 A JP2017071052 A JP 2017071052A
- Authority
- JP
- Japan
- Prior art keywords
- torque
- impulse
- motor means
- kinetic energy
- screw driver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000009467 reduction Effects 0.000 claims abstract description 52
- 230000005540 biological transmission Effects 0.000 claims abstract description 16
- 230000007246 mechanism Effects 0.000 claims description 29
- 230000008859 change Effects 0.000 claims description 19
- 230000036541 health Effects 0.000 abstract description 2
- 230000001133 acceleration Effects 0.000 description 7
- 208000023178 Musculoskeletal disease Diseases 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000008447 perception Effects 0.000 description 3
- 238000004904 shortening Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 241000656145 Thyrsites atun Species 0.000 description 1
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000002650 habitual effect Effects 0.000 description 1
- 230000005802 health problem Effects 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 230000011514 reflex Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 238000009751 slip forming Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B23/00—Details of, or accessories for, spanners, wrenches, screwdrivers
- B25B23/14—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers
- B25B23/147—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers specially adapted for electrically operated wrenches or screwdrivers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B21/00—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose
- B25B21/02—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose with means for imparting impact to screwdriver blade or nut socket
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B21/00—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B23/00—Details of, or accessories for, spanners, wrenches, screwdrivers
- B25B23/14—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers
- B25B23/147—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers specially adapted for electrically operated wrenches or screwdrivers
- B25B23/1475—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers specially adapted for electrically operated wrenches or screwdrivers for impact wrenches or screwdrivers
Abstract
Description
本発明は電動インパルススクリュードライバに関する。
を、例えば、ねじによって接続するために用いられる。
ロータを備えたモータ手段と、
モータ手段と結合される遊星タイプの減速ギヤを含む変速機構によって回転駆動するこ
とができる先端部材と、
設定トルク値Ccに達したことを検出するトルクセンサであって、前記変速機構は、こ
のトルクセンサによってスクリュードライバのハウジングに回転可能に連結されるリング
を含む、トルクセンサと、
前記モータ手段をパルスモードにおいて駆動し、前記モータ手段に一連のインパルスを
供給する手段と
を有する。
ルクを加えることによって作動する電動スクリュードライバが、空気圧インパクトレンチ
又は従来の流体圧レンチに対抗して、最近になって現れてきた。実際には、電動インパル
ススクリュードライバは、高レベルのトルクに関して、流体圧インパルスレンチ又は空気
圧インパルスレンチの利点を維持すると同時に、締付けトルクのレベルをより良好に制御
できるようにする。
締付け動作を実行できることが求められている。
/又はその目的に関連する幾つかのパラメータを取り扱わなければならない。これらは、
スクリュードライバの一定のモータ速度における最大トルク;
変速機構の減速比及びその効率;
工具が満たさなければならない締付け要件
である。
減速比であり、CmaxはN.m.単位の、一定速度における工具のモータの最大トルク
であり、μは減速の効率であり、1より小さい)によって支配されるので、設計者の古典
的で不変の手法は、出力トルクが設定トルク値、すなわち、達成されるべき締付け目標を
達成できるように、モータ及び減速の大きさを設計することである。
工具の生産性及び特に高速で締付け動作を実行する能力;
スクリュードライバの各インパルス時の衝撃及び振動が伝達することによって工具のユ
ーザにかかる応力。
段階を含む。
連続モード、すなわち、一定の高い回転速度において、かつねじを締め付けるために望
まれる設定トルク値Ccより小さな値の締付トルクを用いる、予備ねじ締め段階、及び
設定トルク値Ccに達するまでのインパルスによるねじ締め段階。
リュードライバを用いて、連続締付け速度に関して操作者が耐えることができるレベルを
はるかに超えるトルクレベルにおいてねじを締め付けることができる。
の慣性が締付けトルクの一部を吸収するために可能である。
現在のところ、電動インパルススクリュードライバは、10msのオーダーの持続時間
のトルクインパルスを生成する。この持続時間は、工具本体の慣性質量を考えると、あま
りにも長すぎるので、満足のいく快適性を得るのに十分なほど、操作者の手にかかる締付
け反動を減衰しない。それゆえ、操作者の手がねじ締め軸に沿ってスクリュードライバに
よって回転駆動されることによって表される、操作者の手にかかる反動力は一般的に大き
すぎる。これは操作者にとって不快な結果をもたらし、例えば、筋骨格系障害が現れる。
言い換えると、現在使用されている電動インパルススクリュードライバは、適切な使用快
適度、又は、少なくとも、流体圧レンチによって提供される快適度に相当する快適度を与
えない。
バの公称速度は1000rpmのオーダーであるが、一方、空気圧インパクトレンチ又は
流体圧インパクトレンチは5000rpmのオーダーである。それゆえ、電動インパルス
スクリュードライバによるねじ締め動作にかかる時間の方がはるかに長い。それゆえ、こ
のタイプのスクリュードライバの生産性は、空気圧インパルスレンチ又は流体圧インパル
スレンチの生産性ほど良くない。
転角が小さい、すなわち、30度未満である、「堅固な接合」として知られている接合動
作の場合、予備ねじ締め動作の終了時に、得られるべき設定トルク値が超えられることが
起こり得る。これは、この目的で設けられた電動工具駆動手段によってロータが十分に制
動されないときに、ロータによって蓄積された運動エネルギーがねじに戻されるためであ
る。その際、予備ねじ締め動作の終了時に設定トルク値を超えないようにするために、モ
ータの回転速度を減速する必要がある。この結果、予備ねじ締め動作中の回転速度が更に
低下することになり、それゆえ、生産性が低下する。
作動する電動スクリュードライバから直接派生する。それゆえ、その減速比は、それらの
電動インパルススクリュードライバが、連続モードにおいて作動するスクリュードライバ
によって送達されるトルクに等価なトルクを、連続モードにおいて送達することができる
減速比である。しかしながら、連続モードにおいて従来通りに作動するスクリュードライ
バと同様に、工具のハウジングを回転しないようにするために設計されたリアクションバ
ーを有しない限り、操作者は、約10N.mより高い反動トルクを連続して受けることは
できない。したがって、電動インパルススクリュードライバが、インパルスモードではな
く、誤って連続モードにおいて使用される場合には、操作者の手が受ける工具の反動は、
操作者が耐えることができる反動よりもはるかに大きい。これにより、操作者が怪我をす
る危険性が生じる。
作者にとって健康上の問題が全く生じない電動インパルススクリュードライバを提供する
ことである。
格系障害が現れるのを防ぐこの種のスクリュードライバを得ることである。
できるようにするこの種のスクリュードライバを提供することである。
わち、毎分数1000回転のオーダーに匹敵する予備ねじ締め速度を達成できるようにす
るこの種の電動インパルススクリュードライバを得ることを特に目指す。
るこの種のインパルススクリュードライバを提供することである。
ードライバがインパルスモードではなく、誤って連続モードにおいて使用された場合に特
に、ねじ締め動作に起因してユーザが受ける反動トルクを制限するこの種のインパルスス
クリュードライバを提供することである。
発明の目的は、電動スクリュードライバであって、
ハウジングと、
ロータを有するモータ手段であって、その一定速度における最大トルクはCmaxであ
るモータ手段と、
前記モータ手段に結合され、比R及び効率μを有する減速ギヤを含み、変速機構によっ
て回転駆動することができる先端部材と、
設定トルク値Ccに達したことを検出する少なくとも1つのトルクセンサと、
一連のインパルスを前記モータ手段に供給することを意図されるインパルスモードにお
いて前記モータ手段を駆動する手段とを備え、
前記変速機構は、2つのインパルス間に、運動エネルギーEcを前記ロータ内に蓄積し
、運動エネルギーEcを前記先端部材に返還できるようにすることが可能であり、前記モ
ータ手段及び前記減速ギヤは、
R*μ*Cmax<Ccであるように構成され、前記設定トルク値Ccは、前記運動エ
ネルギーEcを締め付けられるべきねじに伝達することを通して達成される、電動スクリ
ュードライバである。
である。
すなわち、インパルスの知覚を著しく低減することによって操作者の健康状態を維持で
きる。この知覚は操作者を不快にさせないしきい値まで低減される。
また、流体圧工具の予備ねじ締め速度に匹敵する予備ねじ締め速度を確保し、それゆえ
、本発明の工具に高い生産性を与えることができる。
また、スクリュードライバがインパルスモードではなく、誤って連続モードにおいて使
用された場合に操作者が受けるねじ締め動作への反動が低減されるので、使用の安全性を
改善することができる。
ンパルスが十分に短い場合であっても、ステータの電源供給インパルス後に機械的なトル
クインパルスが現れる可能性があり、時間差があることに気が付いた。これは以下のよう
に説明することができる。
る機能的な(角度)クリアランスを含む。モータのステータが電流インパルスを供給され
るとき、ステータは角度クリアランスの限度内でロータを加速させ、その後、遊びが吸収
されると、ロータはその運動エネルギーを衝撃としてねじに伝達し、それにより、トルク
インパルスを生成する。次に、機械的インパルスとも呼ばれる各トルクインパルス中に、
ロータの運動エネルギーは、変速機構ユニットによってスクリュードライバから先端部材
に伝達される。
クインパルス中にいかなる電磁トルクも生成しない。したがって、そのトルクは、工具の
先端部材へのモータの運動エネルギーの返還であり、設定トルク値を達成するのに決定的
な、モータによって生成された電磁トルクではない。それゆえ、減速比の値は、この運動
エネルギーの返還において、そのような役割を果たさない。
。
・操作者は工具のハンドルに無視できる程度の保持力を加える。これは、操作者の手に
おける工具の反動を低減するという本発明の目的のうちの1つに準拠する。
・変速機構は遊星減速ギヤであり、この減速ギヤの遊星枠に、かつ工具の先端部材に当
てはまる動的現象は、ステータのロータに当てはまる動的現象との関連で無視される。
・モータはねじへのトルクインパルス中に電力を供給されないので、ロータ上の工具本
体に固着されるモータのステータに加えられる電磁トルクは0である。
られ、工具本体内でセンサが回転しないようにする。
との間の関係は、以下の関係によって表すことができる。
・Rは遊星減速ギヤの減速比であり、
・μは遊星減速ギヤの効率であり、
のアセンブリに力学の基本原理を適用する際に、以下の関係を仮定することができる。
ス中にモータは電力を供給されないので、そのトルクは0である。
ば、無視される。
・Jbodyはねじ締め軸に沿った工具本体のロータ慣性である。
。

き起こす。工具本体の回転角が小さいほど、操作者がトルクインパルスを知覚しにくくな
る。この加速度の結果である、工具本体の回転角を小さくするために、以下のことを行う
ことができる。
工具本体がこの加速度
この加速度
Jbodyを増加させることによって、又は
変速機構の比Rを小さくすることによって、
直接小さくする。
使用するときに、ロータが、大きな比を有する減速ギヤを使用するときよりも大きな減速
トルクを受けることに気が付いた。
れるトルクとの間の関係は以下の通りである。
Rは遊星減速の減速比であり、
μは遊星減速の効率であり、
れゆえ、この結果は以下の通りである。
きくなり、それゆえ、ロータがその運動エネルギーをアセンブリに伝達する持続時間が短
くなる。
。
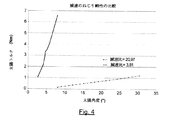
明者らは、比Rの値が10/(μCmax)以下であるという事実を確立する際に減速比
を約5で除算した。
及び1段減速で、その比が3.81に等しい場合のトルクインパルスの持続時間をそれぞ
れ示す曲線を表す。機械的インパルスの持続時間は短縮されるので、工具本体が回転加速
度
クリュードライバの角度シフトが非常に小さくなり、これにより、操作者がインパルスを
知覚するのが制限される。
第一に、工具本体がこの加速度
第二に、
度を小さくする役割を果たす。
るか、又は不快にさせないレベルまで少なくとも制限することができる。このようにして
、スクリュードライバによって操作者の手の中に生成される反動力は、それを超えると操
作者が不快に感じる場合があるか、更には不愉快な効果を感じる場合がある平均許容しき
い値未満にとどまる。したがって、操作者にとって筋骨格系障害が現れるのを防ぎ、イン
パルススクリュードライバの使用の快適性が増す。
うになり、ねじはモータに対する適度な回転速度で締め付けられることになる。実際には
、小さな比は、モータ出力速度がより低くても同等の出力トルクを送達できるようにする
。例えば、10/(μCmax)以下である比を考えると、モータトルクが2.5N.m
に等しく、減速の効率が1に近い場合には、その比は概ね4に等しくなり、モータ出力速
度が20000rpmに等しい場合には、工具の出力速度は5000rpmのオーダーに
なる。それゆえ、本発明による技法は、高い生産性を確保する。
降下させるように行うことができる。この結果は、堅固な接合の場合に特に、ねじが締め
付けられる部品と接触するときに、工具の生産性をそれにより全く低下させることなく、
そのトルクを超える危険性を大きく低減することである。
性を制限する値まで、又は技術的に妥当である、すなわち、20000rpmのオーダー
のモータ速度を維持する値までモータの回転速度を低減できるようになると同時に、全て
の場合に、高い生産性を保持することができるようになる。
く、(ポータブル電動インパルススクリュードライバの設計の分野の)当業者の先入観に
反する問題解決手法に属していることに留意することができる。
反射(reflex)は、接触前にモータの速度を下げることである。しかしながら、設計者の
このタイプの習慣的な行動は工具の生産性を低下させることになり、これは、そのような
工具を使用する数多くの工業分野、例えば、組立ラインにおいて許容できない。
ば、モータの速度を下げても、高い生産性レベルを維持できるようになる。
り設計者は袋小路に入り、出力トルクのレベル(減速比と、一定のモータ速度における最
大トルクとの乗算に等しい)が、所与の最大モータトルクの場合に、もはや設定トルク値
を達成できなくなるためである(確かに、より強力なモータを選択することによって、最
大モータトルクを高めることができると考えることができるが、それでも、その工具の価
格及び/又はその空間要件及び/又はその重量に関して不利に働くことになる)。
は、それを超えると操作者がもはや耐えられなくなる限界、この場合には、10N.mの
限界よりも低いトルク値に設定された上限を有する。したがって、工具のプログラミング
が悪い場合であっても、操作者が耐えることができない連続トルクを受ける。例えば、モ
ータトルクが2.5N.mに等しく、比が4に等しい場合には、連続モードにおける出力
トルクは、操作者がトルクを受け入れる能力に適合する10N.mを超えない。
に伝達される運動エネルギーは、トルクが、ねじが回転し始め、締め付けられるのに必要
とされるレベルに達するまで減速の変形を促進する。変速機構の変形時間、ねじの回転時
間及び変速機構の緩和時間によって連続してインパルスが形成される。変速機構が堅いほ
ど、変形及び緩和の持続時間は短く、それゆえ、トルクインパルスの持続時間は短い。
、段数を少なくすると、変速機構を形成する部品数が減少し、変速機構のねじり変形が小
さくなり、変形が生じる時間が短くなる。これが図4に示されており、図4は、遊星減速
ギヤの入力太陽ギヤ又はモータシャフトによって加えられるトルクと、太陽ギヤ又はモー
タシャフトの回転角との関係を表しており、工具の出力シャフトは工具本体に対して回転
しないように固定される。
段ではなく、1段のみを備え、これがねじ締めインパルスの持続時間を、それゆえ、工具
本体が加速度
小さくし、それゆえ、使用の安全性及び快適性を改善することにも関与する。
構の入力太陽ギヤによって測定され、出力シャフトは工具本体に対して回転しないように
固定される。
であるように構成される。
、操作者の手に及ぼされる望ましくない影響を制限する工具を提案することができる。
メータ化することができる。
ギーEcを蓄積できるようにする角度クリアランスを組み込むことが好ましい。
ードライバのハウジングに回転可能に連結されるリングギヤを備える。
い実施形態の以下の説明から、及び添付の図面から更に明らかになる。
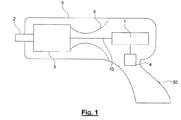
ロータ10を備えるモータ手段1と、
このねじのねじ締めを駆動するようにねじに作用することになる先端部材2と、
モータ手段のロータと先端部材2とを連結し、減速ギヤ3を含む変速機構と、
パルスモードにおいてモータ手段1に電力を供給するように設けられる駆動手段4、言
い換えると、これらの駆動手段4は、モータ手段1に一連のインパルスを供給するように
設計され、各インパルスはロータ10の回転運動を促進する、駆動手段4と
を備えている。
ル50に関連付けられ、ハウジング及びハンドルは、本実施形態において、ねじにピスト
ルハンドルスクリュードライバの形状を与えるように構成される。
下のことを可能にする。
減速のギヤ比を小さくし、それにより、工具本体に伝達されるインパルスの持続時間を
短くし、強度を小さくし、それゆえ、工具の使い勝手(ergonomy)を改善する。
減速ギヤの剛性を高め、それにより、パルスの持続時間を短くし、それゆえ、工具の使
い勝手を改善する。
信頼性を高める。
原価を削減する。
クセンサ6を更に組み込んでいる。このトルクセンサ6の目的は、設定トルク値Ccに達
したことを検出することである。より具体的には、減速ギヤ3は1段のみを備える遊星減
速ギヤであり、そのリングは、トルクセンサ6によって、スクリュードライバのハウジン
グ5に回転可能に連結される。
モータ手段の一定速度における最大トルク:Cmax
変速機構の減速比:R
変速機構効率:μ
設定トルク値:Cc
間に運動エネルギーEcをロータ内に蓄積し、この運動エネルギーEcを先端部材2に返
還できるようにすることが可能である。
設定トルク値Ccは、運動エネルギーEcを締め付けられるべきねじに伝達することを通
して達成される。モータ手段及び減速ギヤは、R*μ*Cmax≦10N.mであるよう
に構成される。言い換えると、それは10/(μCmax)以下である。
に自由に加速し、運動エネルギーEcを蓄積できるようにする角度クリアランスを組み込
んでいる。
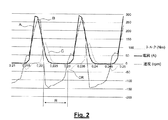
の或る特定の動作パラメータの変化の説明が以下に与えられる。
曲線Aは、駆動手段4によってモータ手段1に与えられるアンペア単位の電流の変化を
示す。
曲線Bは、スクリュードライバのロータ10のrpm単位で表される速度の変化を示す
。
曲線Cは、スクリュードライバの先端部材2によって、スクリュードライバが作用して
いるねじに伝達されるトルクの推移を示す。
する。
モータ手段及び減速ギヤは、R*μ*Cmax≦Cc/1.5であるように構成される
。
Cc>20N.m
である。
Claims (7)
- ハウジング(5)と、
ロータ(10)を有するモータ手段(1)であって、その一定速度における最大トルク
はCmaxであるモータ手段と、
前記モータ手段(1)に結合され、比R及び効率μを有する減速ギヤ(3)を含み、変
速機構によって回転駆動することができる先端部材(2)と、
設定トルク値Ccに達したことを検出する少なくとも1つのトルクセンサ(6)と、
一連のインパルスを前記モータ手段(1)に供給することを意図されるインパルスモー
ドにおいて前記モータ手段(1)を駆動する手段(4)とを備え、
前記変速機構は、2つのインパルス間に運動エネルギーEcを前記ロータ内に蓄積し、
前記運動エネルギーEcを前記先端部材(2)に返還できるようにすることが可能であり
、前記モータ手段(1)及び前記減速ギヤ(4)は、R*μ*Cmax<Ccであるよう
に構成され、前記設定トルク値Ccは、前記運動エネルギーEcを締め付けられるべきね
じに伝達することを通して達成され、
前記比Rは10/(μCmax)以下であることを特徴とする電動スクリュードライバ
。 - 前記減速ギヤは1段のみを有する遊星タイプのものであることを特徴とする請求項1に
記載のスクリュードライバ。 - 前記モータ手段(1)及び前記減速ギヤ(4)は、R*μ*Cmax≦Cc/1.5で
あるように構成されることを特徴とする請求項1又は2に記載のスクリュードライバ。 - Cc>20N.mであることを特徴とする請求項1〜3のいずれか一項に記載のスクリ
ュードライバ。 - 前記変速機構は、前記モータ手段の前記ロータ(10)がインパルス中に自由に加速し
、運動エネルギーEcを蓄積できるようにする角度クリアランスを組み込んでいることを
特徴とする請求項1〜4のいずれか一項に記載のスクリュードライバ。 - 請求項1〜5のいずれか一項に記載のスクリュードライバであって、前記変速機構は、
前記トルクセンサによって該スクリュードライバの前記ハウジングに回転可能に連結され
るリングギヤを備えることを特徴とするスクリュードライバ。 - 前記変速機構は、0.5N.m/度以上の剛性を有することを特徴とする請求項1〜6
のいずれか一項に記載のスクリュードライバ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1153461A FR2974320B1 (fr) | 2011-04-21 | 2011-04-21 | Visseuse electrique a impulsion. |
| FR1153461 | 2011-04-21 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014505658A Division JP2014514174A (ja) | 2011-04-21 | 2012-04-20 | 電動インパルススクリュードライバ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017071052A true JP2017071052A (ja) | 2017-04-13 |
| JP6440668B2 JP6440668B2 (ja) | 2018-12-19 |
Family
ID=46017845
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014505658A Pending JP2014514174A (ja) | 2011-04-21 | 2012-04-20 | 電動インパルススクリュードライバ |
| JP2016217493A Active JP6440668B2 (ja) | 2011-04-21 | 2016-11-07 | 電動インパルススクリュードライバ |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014505658A Pending JP2014514174A (ja) | 2011-04-21 | 2012-04-20 | 電動インパルススクリュードライバ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20140166326A1 (ja) |
| JP (2) | JP2014514174A (ja) |
| CN (1) | CN103619542B (ja) |
| FR (1) | FR2974320B1 (ja) |
| WO (1) | WO2012143532A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102012221748A1 (de) * | 2012-11-28 | 2014-05-28 | Robert Bosch Gmbh | Handwerkzeugmaschine |
| FR3003495B1 (fr) * | 2013-03-22 | 2015-04-17 | Renault Georges Ets | Procede de pilotage d'un dispositif de vissage a impulsions, dispositif de pilotage et dispositif de vissage correspondants |
| FR3015332B1 (fr) * | 2013-12-20 | 2016-01-22 | Renault Georges Ets | Procede de pilotage d'un dispositif de vissage a impulsions, dispositif de pilotage et dispositif de vissage correspondants |
| US9555536B2 (en) * | 2014-06-05 | 2017-01-31 | Hsiu-Lin HSU | Two-stage locking electric screwdriver |
| DE102015000555A1 (de) * | 2015-01-20 | 2016-07-21 | Frank Hohmann | Drehschrauber |
| US10668614B2 (en) | 2015-06-05 | 2020-06-02 | Ingersoll-Rand Industrial U.S., Inc. | Impact tools with ring gear alignment features |
| WO2016196918A1 (en) | 2015-06-05 | 2016-12-08 | Ingersoll-Rand Company | Power tool user interfaces |
| US11260517B2 (en) | 2015-06-05 | 2022-03-01 | Ingersoll-Rand Industrial U.S., Inc. | Power tool housings |
| US11491616B2 (en) * | 2015-06-05 | 2022-11-08 | Ingersoll-Rand Industrial U.S., Inc. | Power tools with user-selectable operational modes |
| FR3061614B1 (fr) * | 2016-12-30 | 2023-04-21 | Renault Georges Ets | Procede de pilotage d'une visseuse electrique a impulsions en fonction de la frequence instantanee de rotation de son moteur, et dispositif correspondant |
| US9908221B1 (en) * | 2017-03-21 | 2018-03-06 | International Business Machines Corporation | Tools with engagement sensors and indicators |
| KR102437925B1 (ko) * | 2017-05-17 | 2022-08-29 | 아틀라스 콥코 인더스트리얼 테크니크 에이비 | 전기 펄스 공구 |
| US11285588B2 (en) * | 2017-12-11 | 2022-03-29 | Atlas Copco Industrial Technique Ab | Electric pulse tool |
| FR3086879B1 (fr) | 2018-10-05 | 2020-12-25 | Renault Georges Ets | Cle a choc electrique a mecanisme d'impact rebondissant |
| CN111791173B (zh) * | 2020-07-14 | 2022-01-07 | 四川大学 | 一种对操作者反作用力极低的扭矩扳手 |
| CN111791172B (zh) * | 2020-07-14 | 2021-09-28 | 四川大学 | 一种对操作者反作用力极低的扭矩扳手 |
| CN116710234A (zh) * | 2021-01-26 | 2023-09-05 | 松下知识产权经营株式会社 | 电动工具、电动工具的控制方法和程序 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0775974A (ja) * | 1993-07-06 | 1995-03-20 | Black & Decker Inc | 実効トルク出力を増加させるモータ制御回路を具えた電動工具 |
| JPH081536A (ja) * | 1994-06-27 | 1996-01-09 | Matsushita Electric Works Ltd | 電動ドライバのトルク制御装置 |
| JP2002001676A (ja) * | 2000-06-19 | 2002-01-08 | Estic Corp | ネジ締め装置の制御方法および装置 |
| JP2004322262A (ja) * | 2003-04-24 | 2004-11-18 | Estic Corp | インパクト式のネジ締め装置の制御方法および装置 |
| JP2005254372A (ja) * | 2004-03-10 | 2005-09-22 | Sanyo Mach Works Ltd | ナットランナ及びその制御方法 |
| JP2006315125A (ja) * | 2005-05-12 | 2006-11-24 | Estic Corp | インパクト式のネジ締め装置の制御方法および装置 |
| JP2008055580A (ja) * | 2006-09-01 | 2008-03-13 | Estic Corp | インパクト式のネジ締め装置 |
| JP2011031313A (ja) * | 2009-07-29 | 2011-02-17 | Hitachi Koki Co Ltd | インパクト工具 |
| JP2013202705A (ja) * | 2012-03-27 | 2013-10-07 | Toyota Motor Corp | ネジ締付方法及びネジ締付装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6424799B1 (en) * | 1993-07-06 | 2002-07-23 | Black & Decker Inc. | Electrical power tool having a motor control circuit for providing control over the torque output of the power tool |
| CN1052932C (zh) * | 1996-06-06 | 2000-05-31 | 丁心河 | 简易型全自动电扳手 |
| CN2268603Y (zh) * | 1996-07-30 | 1997-11-26 | 福建省龙岩电动工具厂 | 手持式击发电板机 |
| CN2413861Y (zh) * | 1999-08-31 | 2001-01-10 | 赵加强 | 电动扳手 |
| FR2894172B1 (fr) * | 2005-12-01 | 2008-02-08 | Georges Renault Soc Par Action | Outillage de vissage a tete d'angle, incluant un capteur de couple monte sur l'arbre de sortie, et module de transmission correspondant. |
| SE0700264L (sv) * | 2007-02-05 | 2008-05-13 | Atlas Copco Tools Ab | Mutterdragare med svivlat växelhus |
| JP4674640B2 (ja) * | 2009-01-27 | 2011-04-20 | パナソニック電工株式会社 | インパクト回転工具 |
-
2011
- 2011-04-21 FR FR1153461A patent/FR2974320B1/fr active Active
-
2012
- 2012-04-20 US US14/113,181 patent/US20140166326A1/en not_active Abandoned
- 2012-04-20 WO PCT/EP2012/057320 patent/WO2012143532A1/fr active Application Filing
- 2012-04-20 JP JP2014505658A patent/JP2014514174A/ja active Pending
- 2012-04-20 CN CN201280021406.7A patent/CN103619542B/zh active Active
-
2016
- 2016-11-07 JP JP2016217493A patent/JP6440668B2/ja active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0775974A (ja) * | 1993-07-06 | 1995-03-20 | Black & Decker Inc | 実効トルク出力を増加させるモータ制御回路を具えた電動工具 |
| JPH081536A (ja) * | 1994-06-27 | 1996-01-09 | Matsushita Electric Works Ltd | 電動ドライバのトルク制御装置 |
| JP2002001676A (ja) * | 2000-06-19 | 2002-01-08 | Estic Corp | ネジ締め装置の制御方法および装置 |
| JP2004322262A (ja) * | 2003-04-24 | 2004-11-18 | Estic Corp | インパクト式のネジ締め装置の制御方法および装置 |
| JP2005254372A (ja) * | 2004-03-10 | 2005-09-22 | Sanyo Mach Works Ltd | ナットランナ及びその制御方法 |
| JP2006315125A (ja) * | 2005-05-12 | 2006-11-24 | Estic Corp | インパクト式のネジ締め装置の制御方法および装置 |
| JP2008055580A (ja) * | 2006-09-01 | 2008-03-13 | Estic Corp | インパクト式のネジ締め装置 |
| JP2011031313A (ja) * | 2009-07-29 | 2011-02-17 | Hitachi Koki Co Ltd | インパクト工具 |
| JP2013202705A (ja) * | 2012-03-27 | 2013-10-07 | Toyota Motor Corp | ネジ締付方法及びネジ締付装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6440668B2 (ja) | 2018-12-19 |
| CN103619542B (zh) | 2016-06-29 |
| FR2974320B1 (fr) | 2014-05-02 |
| FR2974320A1 (fr) | 2012-10-26 |
| US20140166326A1 (en) | 2014-06-19 |
| JP2014514174A (ja) | 2014-06-19 |
| WO2012143532A1 (fr) | 2012-10-26 |
| CN103619542A (zh) | 2014-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6440668B2 (ja) | 電動インパルススクリュードライバ | |
| JP5146834B2 (ja) | インパクトレンチのインパクト機構 | |
| US10322498B2 (en) | Electric power tool | |
| US8925646B2 (en) | Right angle impact tool | |
| EP2533943B1 (en) | Apparatus for tightening threaded fasteners | |
| US20100000749A1 (en) | Impact Wrench | |
| JP3038221B2 (ja) | トルク衝撃供給動力工具 | |
| JP6245367B2 (ja) | 打撃工具 | |
| US20130333910A1 (en) | Impact tool | |
| US20130264087A1 (en) | Driving Tool | |
| US20200112283A1 (en) | Electrical impact wrench with rebound impact mechanism | |
| US9366299B2 (en) | Handheld drill/driver device | |
| JP5496190B2 (ja) | インパクト工具 | |
| JP2012139767A (ja) | 締付工具 | |
| JP2013022691A (ja) | インパクト回転工具 | |
| JP2002264031A (ja) | 電動工具 | |
| CN102256748B (zh) | 具有手动操作动力控制装置的便携式动力扳手 | |
| JP7030755B2 (ja) | 最適化されたリバウンドを伴うインパルス式締付け方法 | |
| CN219152718U (zh) | 冲击工具 | |
| CN111791173A (zh) | 一种对操作者反作用力极低的扭矩扳手 | |
| JP6455227B2 (ja) | 打撃工具 | |
| JP3882379B2 (ja) | ねじ締めインパクト工具 | |
| JP2019130613A (ja) | 打撃作業機 | |
| JP4872021B1 (ja) | 回転式締付機 | |
| SU891418A1 (ru) | Гайковерт инерционный |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180130 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180416 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180730 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181026 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6440668 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |