JP2016201942A - 減速機付モータおよびリヤワイパモータ - Google Patents
減速機付モータおよびリヤワイパモータ Download PDFInfo
- Publication number
- JP2016201942A JP2016201942A JP2015081792A JP2015081792A JP2016201942A JP 2016201942 A JP2016201942 A JP 2016201942A JP 2015081792 A JP2015081792 A JP 2015081792A JP 2015081792 A JP2015081792 A JP 2015081792A JP 2016201942 A JP2016201942 A JP 2016201942A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- housing
- drive shaft
- motor housing
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000009467 reduction Effects 0.000 title claims abstract description 86
- 230000005540 biological transmission Effects 0.000 claims abstract description 50
- 230000007246 mechanism Effects 0.000 claims description 28
- 239000003638 chemical reducing agent Substances 0.000 claims description 12
- 230000002093 peripheral effect Effects 0.000 description 24
- 239000000758 substrate Substances 0.000 description 13
- 238000004804 winding Methods 0.000 description 13
- 238000003860 storage Methods 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 230000001276 controlling effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000002265 prevention Effects 0.000 description 3
- 239000004593 Epoxy Substances 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- 239000003990 capacitor Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 239000006247 magnetic powder Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
Images
















Landscapes
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
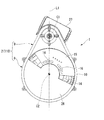
【解決手段】モータハウジング2内に収納されるモータ部4と、モータハウジング2内に収納され、モータ部4のモータ軸から動力を受けて駆動し、ロータボス43の回転を減速させて出力する減速部5と、モータハウジング2内に収納され、減速部5の出力軸58に伝達ベルト6を介して連結され、被駆動体を駆動させる駆動軸7と、を備え、ロータボス43と出力軸58とが同軸上に配置され、出力軸58と駆動軸7とが径方向に並んで配置されている。
【選択図】図1
Description
減速部には、減速比が高い点やセルフロック機能を有している点等からウォーム減速機構を採用する場合が多い。そして、ウォーム減速機構のウォーム軸にモータ部が接続される一方、ウォームホイールに出力軸が接続される。
また、出力軸の軸方向からみた平面形状が、左右対称の形状となるように構成することが困難である。このため、例えば、減速機付モータを制約のある車体のスペース内に取り付けようとすると、車種に応じて減速部とモータ部との位置関係を変更する必要が生じる。よって、減速機付モータの製造コストが増大してしまうという課題があった。
(ワイパモータ)
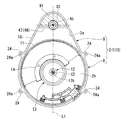
図1は、ワイパモータ1の縦断面図である。図2は、ワイパモータ1の分解斜視図である。図3は、図1のA矢視図である。
図1〜図3に示すように、ワイパモータ1は、車両に搭載されているリヤワイパのワイパアーム(何れも不図示)を回動させるための駆動装置であって、車両のバックドア等に設けられる。ワイパモータ1は、ケーシング110と、ケーシング110内に収納されるモータ部4、減速部5、伝達ベルト6、および駆動軸7と、を備えている。ケーシング110は、一面に開口部2aを有する略箱状のモータハウジング2と、モータハウジング2の開口部2aを閉塞するハウジングカバー3と、に2分割構成されている。
図4は、モータハウジング2を開口部2a側からみた斜視図である。図5は、モータハウジング2を開口部2a側からみた平面図である。
図1、図3〜図5に示すように、モータハウジング2は、平面視略円形状のハウジング本体8と、ハウジング本体8の一側から突出するサブハウジング9とが一体成形されたものである。そして、モータハウジング2の側壁10は、ハウジング本体8の外周部とサブハウジング9の外周部とにそれぞれ連なるように形成されている。側壁10の開口部2aの周縁には、モータハウジング2とハウジングカバー3とをボルト20(図2参照)によって締結固定するための取付座24が4箇所一体成形されている。各取付座24には、ボルト20を挿通可能な貫通孔24aが形成されている。
支持シャフト12は、軸方向略中央よりも基端側から先端に至る間が、段差部12aを介して縮径形成された縮径部12bとされている。
また、ハウジング本体8の内面には、3つのターミナル19a,19b,19cが敷設されている。各ターミナル19a,19b,19cは、内側面に沿って開口部2aから底壁2bに至る間に設けられている。
支持筒45の外周面のうち、サブハウジング9の外側(モータハウジング2の開口部2aとは反対側)に突出している箇所には、複数(例えば、4つ)のリブ46が一体成形されている。各リブ46は、周方向に等間隔で配置されている。これらリブ46により、支持筒45の剛性が図られている。
このように形成されたモータハウジング2は、図3、図5に詳示するように、支持筒45の軸心C1(支持シャフト12の軸心C2)方向からみた外形状が、直線L1に対して線対称となるように形成されている。
図6は、ハウジングカバー3の斜視図である。
図1、図2、図6に示すように、ハウジングカバー3は、モータハウジング2の開口部2aのうち、ハウジング本体8側の大部分を閉塞する略円板状のカバー本体25と、カバー本体25の一側から突出し、ハウジング本体8の一部、およびサブハウジング9を閉塞しつつ駆動ドライバ27が収納されるドライバ収納部26とが一体成形されたものである。
そして、図7に示すように、モータハウジング2にハウジングカバー3を取り付けた状態では、コネクタ22の雌端子22d,22e,22fにモータハウジング2の雄端子22a,22b,22cが差し込まれる。
ドライバ収納部26は、カバー本体25の外面25b側に突出するように形成されている。そして、ドライバ収納部26は、カバー本体25の内面25a側が開口するように、略直方体の箱状に形成されている。このように形成されたドライバ収納部26内に、駆動ドライバ27が収納されている。
図8は、モータ部4の平面図である。図9は、ステータ17の斜視図である。
図1、図2、図8、図9に示すように、モータ部4は、いわゆるアウタロータ形のブラシレスモータであって、ステータ17と、ステータ17をモータハウジング2の開口部2a側から覆うように形成されたロータ18と、により構成されている。
周方向に並ぶ所定の3つのティース部32には、鍔部34におけるモータハウジング2の底壁2b側の端面に、鍔部34をそのまま突出させた形の端子ホルダ37が一体成形されている。各端子ホルダ37の周方向一端側には凹部37aが形成されており、この凹部37aに、ナイフスイッチ23を構成する雄端子23d,23e,23fがセットされている。
同図に示すように、雄端子23d,23e,23fは、端子本体38を有している。端子本体38には、ステータ17側に向かって突出する一対の取付脚部39が一体成形されている。一対の取付脚部39は、凹部37aに差し込まれることによってステータ17上に雄端子23d,23e,23fを固定するためのものである。一対の取付脚部39には、それぞれ対向する側とは反対側の側辺に凸部39aが一体成形されている。この凸部39aが凹部37aの内側面に押圧される形となり、ステータ17上に各雄端子23d,23e,23fが固定される。
図1、図11に示すように、モータハウジング2の円筒部13にステータ17を取り付けると、モータハウジング2に設けられたターミナル19a,19b,19cの雌端子23a,23b,23cに、ステータ17の雄端子23d,23e,23fが挿入される。これにより、ナイフスイッチ23が電気的に接続され、さらに、このナイフスイッチ23、ターミナル19a,19b,19c、およびハウジングカバー3のターミナル28a,28b,28cを介し、巻線36と駆動ドライバ27とが電気的に接続される。
さらに、ロータボス43の玉軸受49が設けられている箇所(先端)には、減速部5が取り付けられている。この他に、ロータ18の底壁18bには、ロータボス43と外周部(周壁18a)との間に、複数の孔18cが形成されている。これら孔18cにより、ロータ18の軽量化が図られている。
図12は、減速部5をモータ部4側からみた平面図である。図13は、減速部5をモータ部4とは反対側からみた平面図である。
図1、図2、図12、図13に示すように、減速部5は、モータ部4上にこのモータ部4と同軸上に配置され、かつモータハウジング2の減速収納部8bに収納されている。減速部5は、いわゆる2段減速ハイポサイクロイド機構として構成されている。減速部5は、ロータボス43の先端に外嵌固定されている略円板状の偏心部51と、モータハウジング2に固定されたインターナルギヤ52と、偏心部51に玉軸受53を介して取り付けられたインナーギヤ54と、インナーギヤ54の回転を減速して出力するドライブギヤ55と、を有している。
また、偏心部51の外周面は、支持シャフト12の軸心C2(ロータ18の回転軸線)に対して偏心した位置を中心(以下、この中心を偏心中心という)とするように、軸方向平面視で円形状に形成されている。このため、偏心部51の外周面は、支持シャフト12の軸心C2に対して偏心回転する。
また、インターナルギヤ52の径方向中央の大部分に、開口部52eが形成されている。この開口部52eを介し、ロータボス43の先端および偏心部51がモータ部4とは反対側に突出している。さらに、インターナルギヤ52の周壁52bは、モータハウジング2の支持シャフト12と同心円上に位置し、その内周面に内歯52cが形成されている。
図1、図14、図15に示すように、伝達ベルト6は、出力軸58の回転力を駆動軸7に伝達するためのものであって、内周面に内歯6aが形成されている。この内歯6aと出力軸58の外歯58aとが噛合うことにより、出力軸58に対して伝達ベルト6が滑ることなく回転する。
駆動軸7は、モータハウジング2のサブハウジング9に設けられた支持筒45に挿入されている。すなわち、駆動軸7は、ロータ18の回転軸線(ロータボス43の回転軸線)および出力軸58の回転軸線に対して平行となるように並んで配置されている。
また、駆動軸7の長さは、支持筒45の軸方向両端からそれぞれ駆動軸7の両端が突出する長さに設定されている。
取付ボス67には、駆動軸7の内側端を受け入れるスプライン凹部67aが形成されている。一方、駆動軸7の内側端には、スプライン7aが形成されている。これにより、駆動軸7とプーリ65とがスプライン嵌合し、両者7,65が一体となって回転する。
また、支持筒45に駆動軸7を取り付けた状態では、プーリ本体66と出力軸58との軸方向の位置が同一になる。これにより、プーリ本体66に伝達ベルト6が係合される。そして、プーリ本体66の外歯66aと伝達ベルト6の内歯6aとが噛合うことにより、プーリ本体66に対して伝達ベルト6が滑ることなく回転する。
ここで、支持筒45に駆動軸7を取り付けた状態では、図5に示すモータハウジング2の規制領域R1に、プーリ本体66の規制凸部71が介在する。また、規制凸部71とモータハウジング2の規制壁47は、互いに干渉する高さに設定されている。すなわち、プーリ本体66は、規制凸部71が規制領域R1内で移動可能な範囲でのみ回転することができるようになっている。このように、規制凸部71と規制壁47は、それぞれプーリ65(駆動軸7)の回転範囲を規制する回転規制部48として構成されている。
次に、ワイパモータ1の組み立て手順について説明する。
まず、モータ部4のステータ17、およびロータ18をそれぞれ別々に予め組み立てた上で、モータハウジング2の開口部2a側から、円筒部13にステータコア31の貫通孔31aを挿入する。そして、円筒部13の段差部13aに、ステータコア31の端面を当接させる。このとき、縮径部13bへの挿入と同時に、モータハウジング2の底壁2bに設けられているナイフスイッチ23の雌端子23a,23b,23cに、対応するステータコア31の雄端子23d,23e,23fを差し込む。
なお、円筒部13に形成されている回り止め凸条部13cの位置、およびステータ17に形成されている回り止め溝31bの位置は、ナイフスイッチ23の雌端子23a,23b,23cと雄端子23d,23e,23fとが接続可能な位置に設定されている。
このように、モータハウジング2の開口部2a側の一方向からモータ部4、減速部5、伝達ベルト6の順に組み付けることにより、これらモータ部4、減速部5、伝達ベルト6が、モータハウジング2内に収納される。
次に、ワイパモータ1の動作について説明する。
不図示の外部電源から駆動ドライバ27に電力が供給されると共に、不図示の制御部(例えばECU)からの出力信号が駆動ドライバ27に供給されると、モータ部4に所定のタイミングで所定の電流が供給され、モータ部4のロータ18が回転する。このロータ18の回転角度は、モータハウジング2に設けられたセンサ基板15によって検出される。センサ基板15による検出結果は、信号として不図示の制御部に出力される。
ここで、プーリ65に設けられたセンサマグネット68および駆動ドライバ27の素子69によって検出されるプーリ65(駆動軸7)の回転角度は、信号として制御部に出力される。制御部は、駆動軸7が所定の回転範囲で正転、反転するように信号を出力する。そして、モータ部4は、制御部の出力信号に基づいて正転、反転を繰り返すように駆動する。
このため、モータハウジング2の開口部2a側からモータ部4、減速部5、伝達ベルト6の順に組み付けることができる。つまり、モータハウジング2の一方向のみからモータ部4、減速部5、および伝達ベルト6を組み付けることができる。このため、ワイパモータ1の組立作業性を向上できる。
また、減速部5をハイポサイクロイド機構で構成しているので、高い減速比を確保しつつ、減速部5を扁平化できる。このため、ワイパモータ1全体として小型化、扁平化できる。
また、伝達ベルト6の内歯6aとプーリ65とを、モータ部4への過負荷を防止するクラッチ機構として機能させている。このため、駆動軸7に外力がかかった場合であっても、モータ部4が逆転してしまうことを防止でき、モータ部4の損傷等を防止できると共に、クラッチ機構を簡素な構造とすることができる。
このように、役割の異なるセンサ基板15と駆動ドライバ27とを別々に設けることができるので、これらセンサ基板15や駆動ドライバ27の大型化を抑制できる。これに加え、これらセンサ基板15や駆動ドライバ27を配置するために余分なスペースを確保する必要がなくなる。よって、減速機付モータを小型化できる。
また、駆動ドライバ27に、駆動軸7の回転角度を検出する素子69を実装しているので、ワイパモータ1の大型化を抑制しつつ、駆動軸7の回転角度も高精度に制御できる。
また、上述の第1実施形態では、伝達ベルト6の内歯6aとプーリ65とが、モータ部4への過負荷を防止するクラッチ機構として機能する場合について説明した。しかしながら、これに限られるものではなく、出力軸58から駆動軸7に至る間の動力伝達系上の何れかであれば、別途クラッチ機構を設けてもよい。
次に、図16、図17に基づいて、第2実施形態について説明する。
図16は、第2実施形態における減速部205を、モータ部4側からみた平面図である。図17は、第2実施形態における減速部205を、モータハウジング2の開口部2a側からみた平面図である。なお、この第2実施形態において、前述の第1実施形態と同一態様には、同一符号を付して説明を省略する(以下の実施形態についても同様)。
より詳しくは、減速部205は、ロータ18のロータボス43の先端に外嵌固定され、ロータ18と一体となって回転するサンギヤ101と、サンギヤ101を中心に公転する複数(例えば、第2実施形態では3つ)のプラネタリギヤ102と、これらプラネタリギヤ102の外周側に設けられた環状の内歯リングギヤ103とにより構成されている。
内歯リングギヤ103は、モータハウジング2の減速収納部8bに固定されている。内歯リングギヤ103は、複数のプラネタリギヤ102と噛合可能に構成されている。
したがって、上述の第2実施形態によれば、前述の第1実施形態と同様の効果を奏することができる。また、仕様に応じて減速部205を前述の第1実施形態における減速部5に対して変更することができるので、ワイパモータのバリエーションを増大させることができる。
次に、図18に基づいて、第3実施形態について説明する。
図18は、第3実施形態におけるリンク機構306を示し、モータハウジング2の開口部2a側からみた平面図である。
同図に示すように、第3実施形態では、減速部5から駆動軸7に動力を伝達する手段として、前述の第1実施形態における伝達ベルト6に代わってリンク機構306が採用されている。そして、第3実施形態におけるドライブギヤ55には、出力軸58が設けられていない。
このように構成した場合であっても、前述の第1実施形態と同様の効果を奏することができる。
次に、図19に基づいて、第4実施形態について説明する。
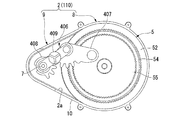
図19は、第4実施形態におけるセクタギヤ機構406を示し、モータハウジング2の開口部2a側からみた平面図である。
同図に示すように、第4実施形態では、減速部5から駆動軸7に動力を伝達する手段として、前述の第1実施形態における伝達ベルト6に代わってセクタギヤ機構406が採用されている。そして、第4実施形態におけるドライブギヤ55には、出力軸58が設けられていない。
セクタギヤ407の他端には、ピニオン408の歯部408aと噛合可能な歯部407aが形成されている。そして、これら歯部407a,408a同士の噛合状態を維持するように、連結板409の長さが設定されている。
このように、構成した場合であっても、前述の第1実施形態と同様の効果を奏することができる。
例えば、上述の実施形態で示す減速機付モータは、車両に搭載されるワイパモータ1である場合について説明した。しかしながら、上述のワイパモータ1は、減速機付モータとしてさまざまな装置に適用することが可能である。
2…モータハウジング
2a…開口部
4…モータ部
5,205…減速部
6…伝達ベルト
6a…内歯(クラッチ機構)
7…駆動軸
10…側壁
10a…段差部
18…ロータ
43…ロータボス(モータ軸)
47…規制壁
48…回転規制部(規制部)
58…出力軸
65…プーリ(クラッチ機構)
71…規制凸部(規制部)
Claims (10)
- モータハウジング内に収納されるモータ部と、
前記モータハウジング内に収納され、前記モータ部のモータ軸から動力を受けて駆動し、前記モータ軸の回転を減速させて出力する減速部と、
前記モータハウジング内に収納され、前記減速部の出力軸に動力伝達部を介して連結され、被駆動体を駆動させる駆動軸と、
を備え、
前記モータ軸と前記出力軸とが同軸上に配置され、
前記出力軸と前記駆動軸とが径方向に並んで配置されていることを特徴とする減速機付モータ。 - 前記モータハウジングは、前記駆動軸の軸方向からみて前記駆動軸の軸線を通る任意の直線に対し、線対称となるように形成されていることを特徴とする請求項1に記載の減速機付モータ。
- 前記モータハウジングは、一面に開口部を有するように箱状に形成されており、
前記モータハウジングの内側面は、開口面積が前記開口部から底壁に向かって段差部を介して縮小するように形成されており、
前記モータハウジングには、前記底壁側から前記モータ部、前記減速部、前記動力伝達部の順で収納されていることを特徴とする請求項1または請求項2に記載の減速機付モータ。 - 前記モータ部は、ブラシレスモータからなることを特徴とする請求項1〜請求項3の何れか1項に記載の減速機付モータ。
- 前記減速部は、ハイポサイクロイド機構からなることを特徴とする請求項1〜請求項4の何れか1項に記載の減速機付モータ。
- 前記動力伝達部は、伝達ベルトからなることを特徴とする請求項1〜請求項5の何れか1項に記載の減速機付モータ。
- 前記動力伝達部と前記出力軸との間、および前記動力伝達部と前記駆動軸との間の少なくとも何れか一方にクラッチ機構を設けたことを特徴とする請求項6に記載の減速機付モータ。
- 前記伝達ベルトの内面には歯部が設けられており、
前記駆動軸には、前記歯部に噛合可能なプーリが一体的に設けられており、
前記伝達ベルトの前記歯部と前記プーリとが前記クラッチ機構として機能することを特徴とする請求項7に記載の減速機付モータ。 - 前記プーリおよび前記モータハウジングの少なくとも何れか一方に、前記プーリの回転角度の範囲を規制する規制部を設けたことを特徴とする請求項8に記載の減速機付モータ。
- 請求項1〜請求項9の何れか1項に記載の減速機付モータを、車両のリヤワイパを駆動するために用いたことを特徴とするリヤワイパモータ。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015081792A JP6514014B2 (ja) | 2015-04-13 | 2015-04-13 | 減速機付モータおよびリヤワイパモータ |
| PCT/JP2016/061813 WO2016167252A1 (ja) | 2015-04-13 | 2016-04-12 | 減速機付モータおよびリヤワイパモータ |
| EP18212996.5A EP3480926B1 (en) | 2015-04-13 | 2016-04-12 | Motor with speed reducer, and rear wiper motor |
| US15/562,245 US20180083507A1 (en) | 2015-04-13 | 2016-04-12 | Motor with speed reducer, and rear wiper motor |
| EP16780043.2A EP3285373B1 (en) | 2015-04-13 | 2016-04-12 | Motor with speed reducer, and rear wiper motor |
| US17/167,360 US20210159758A1 (en) | 2015-04-13 | 2021-02-04 | Motor with speed reducer, and rear wiper motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015081792A JP6514014B2 (ja) | 2015-04-13 | 2015-04-13 | 減速機付モータおよびリヤワイパモータ |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019075068A Division JP6670964B2 (ja) | 2019-04-10 | 2019-04-10 | 減速機付モータおよびリヤワイパモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016201942A true JP2016201942A (ja) | 2016-12-01 |
| JP6514014B2 JP6514014B2 (ja) | 2019-05-15 |
Family
ID=57423063
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015081792A Expired - Fee Related JP6514014B2 (ja) | 2015-04-13 | 2015-04-13 | 減速機付モータおよびリヤワイパモータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6514014B2 (ja) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6391390U (ja) * | 1986-12-01 | 1988-06-13 | ||
| JPH0216576U (ja) * | 1988-07-19 | 1990-02-02 | ||
| JPH0480258U (ja) * | 1990-11-21 | 1992-07-13 | ||
| JP2001132593A (ja) * | 1999-11-10 | 2001-05-15 | Denso Corp | 補機駆動兼用スタータ |
| JP2008206373A (ja) * | 2007-02-22 | 2008-09-04 | Mitsuba Corp | 減速機構付き電動モータ |
| US20090050420A1 (en) * | 2006-02-20 | 2009-02-26 | Gregor Poertzgen | Reduced-Noise Electric Brake Actuator |
| JP2010187460A (ja) * | 2009-02-12 | 2010-08-26 | Nippon Densan Corp | サーボユニット |
| JP2014128182A (ja) * | 2012-12-27 | 2014-07-07 | Denso Corp | 回転駆動装置 |
-
2015
- 2015-04-13 JP JP2015081792A patent/JP6514014B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6391390U (ja) * | 1986-12-01 | 1988-06-13 | ||
| JPH0216576U (ja) * | 1988-07-19 | 1990-02-02 | ||
| JPH0480258U (ja) * | 1990-11-21 | 1992-07-13 | ||
| JP2001132593A (ja) * | 1999-11-10 | 2001-05-15 | Denso Corp | 補機駆動兼用スタータ |
| US20090050420A1 (en) * | 2006-02-20 | 2009-02-26 | Gregor Poertzgen | Reduced-Noise Electric Brake Actuator |
| JP2008206373A (ja) * | 2007-02-22 | 2008-09-04 | Mitsuba Corp | 減速機構付き電動モータ |
| JP2010187460A (ja) * | 2009-02-12 | 2010-08-26 | Nippon Densan Corp | サーボユニット |
| JP2014128182A (ja) * | 2012-12-27 | 2014-07-07 | Denso Corp | 回転駆動装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6514014B2 (ja) | 2019-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016167252A1 (ja) | 減速機付モータおよびリヤワイパモータ | |
| JP5648564B2 (ja) | 回転式アクチュエータ | |
| US20170089118A1 (en) | Driving mechanism | |
| KR20080045176A (ko) | 소형의 축방향 플럭스 모터 드라이브 | |
| WO2019077886A1 (ja) | 減速機構及び減速機付モータ | |
| JP5488931B2 (ja) | 回転式アクチュエータ | |
| CN116325447A (zh) | 具备无刷直流马达的驱动马达及利用其的旋转促动器 | |
| JP2010263689A (ja) | 電動モータ、および減速機付モータ | |
| KR101985878B1 (ko) | 이중기어를 갖는 전자식 주차 브레이크 액츄에이터 | |
| WO2016076250A1 (ja) | 減速機構付モータ | |
| JP2015023659A (ja) | 減速機付モータおよび駆動装置 | |
| JP2006304558A (ja) | モータ組込みハイポサイクロイド減速機 | |
| JP6670964B2 (ja) | 減速機付モータおよびリヤワイパモータ | |
| US11916439B2 (en) | Rotor, motor, and wiper motor having a structure for fixing a magnet to a rotor core | |
| JP6514014B2 (ja) | 減速機付モータおよびリヤワイパモータ | |
| TWI337163B (ja) | ||
| JP6510867B2 (ja) | 減速機付モータおよびリヤワイパモータ | |
| JP2010091009A (ja) | 減速機構付モータ | |
| JP7199183B2 (ja) | 減速機構、及び減速機付モータ | |
| JP2016033387A (ja) | シフトレンジ切替装置 | |
| JP2018064310A (ja) | ロータ組立体 | |
| JP2011036004A (ja) | 減速機付モータ | |
| JP2020128817A (ja) | 伝動装置、駆動ユニット及び可動ユニット | |
| KR102157024B1 (ko) | Bldc 모터를 이용한 구동모듈 | |
| KR102367482B1 (ko) | 차량용 전자식 변속기 제어용 액츄에이터 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171027 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181004 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181026 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190312 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190411 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6514014 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |