JP5648564B2 - 回転式アクチュエータ - Google Patents
回転式アクチュエータ Download PDFInfo
- Publication number
- JP5648564B2 JP5648564B2 JP2011084571A JP2011084571A JP5648564B2 JP 5648564 B2 JP5648564 B2 JP 5648564B2 JP 2011084571 A JP2011084571 A JP 2011084571A JP 2011084571 A JP2011084571 A JP 2011084571A JP 5648564 B2 JP5648564 B2 JP 5648564B2
- Authority
- JP
- Japan
- Prior art keywords
- gear
- housing
- drive shaft
- drive
- ring gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Gear-Shifting Mechanisms (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Description
また、ドライブギヤとドリブンギヤとの間の減速比を適宜設定することにより出力軸からの出力トルクを大きくすることができる。
また、請求項1に記載の発明では、中ハウジングは、樹脂製の中ハウジング本体と、その中ハウジング本体に埋め込まれている金属製の環状部材とからなる。環状部材は、リングギヤの径方向の変位を規制するリングギヤ保持内壁を有する。そのため、リングギヤの保持力を十分に確保しつつ中ハウジングの軽量化を図ることができる。
本発明をシフトバイワイヤシステムに適用した第1実施形態について図1に基づいて説明する。
シフトバイワイヤシステム7は、運転者により操作される例えばセレクトレバー等のレンジ選択部材の操作位置に応じてアクチュエータ1を作動させて車両用自動変速機のシフトレンジを切り換える。シフトバイワイヤシステム7は、レンジ選択部材とアクチュエータ1とがワイヤ(電線)を経由して電気的に接続されるバイワイヤシステムであり、電子制御ユニット71(Electric Control Unit;以下「ECU」という)、アクチュエータ1、コントロールロッド72、ディテント機構73、およびパーキングロック機構74を備えている。
ディテントプレート730は、コントロールロッド72から径外方向に突設された板状部材であり、突き出した先端面に複数の係合溝731を有している。またディテントプレート730は、コントロールロッド72の軸方向に平行な方向へ突設された係合突起732を形成している。この係合突起732は、マニュアルバルブ70の弁部材701に対して弁部材701の軸方向の係合可能である。
パークロッド740の基端部はディテントプレート730に連結されている。そしてパークロッド740の先端部は、ディテントプレート730が回動するにしたがってパーキングギヤ743の軸方向に略平行な方向へ往復移動する。カム部材741はパークロッド740の先端部に設けられ、その先端部と共に往復移動する。パーキングロックポール742にはパーキングギヤ743に接近および離間可能な噛合突起部742aが設けられている。この噛合突起部742aは、カム部材741がパーキングロックポール742の先端部と台座744との間に挿入されるとパーキングギヤ743側へ移動してそのパーキングギヤ743に噛み合い、パーキングギヤ743が固定された有段変速機の出力部材を回転不能に固定する。また噛合突起部742aは、カム部材741がパーキングロックポール742の先端部と台座744との間から抜け出すとパーキングギヤ743から離間してそのパーキングギヤ743との噛み合いを解除し、有段変速機の出力部材を回転可能とする。
図2に模式的に示すように、アクチュエータ1は、モータ2、サイクロイド減速部3、平行軸歯車減速部4、および出力軸5を外郭部材6内に備えている。第1実施形態の外郭部材6は、平行軸歯車減速部4および出力軸5を主に収容する前ハウジング60と、サイクロイド減速部3を主に収容する中ハウジング61と、モータ2を主に収容する後ハウジング62との3つのハウジングから構成されている。なお本実施形態では、サイクロイド減速部3および平行軸歯車減速部4が減速機を構成している。
ロータ20は、駆動軸200およびロータコア201から構成されている。駆動軸200は、後ハウジング62側の一端部200aが第1転がり軸受80により回転可能に支持され、また前ハウジング60側の他端部200bが第2転がり軸受81により回転可能に支持されている。第1転がり軸受80は後ハウジング62に嵌合されている。また第2転がり軸受81は後述のドライブギヤ40の内側に嵌合されている。そして駆動軸220の一端部200aと他端部200bとの間には、一端部200a側から順に大径部200cおよび偏心部200dが設けられている。「偏心軸」としての偏心部200dは、一端部200a、大径部200c、および他端部200bの第1軸中心線φ1に対し偏心し且つ平行な第2軸中心線φ2上に設けられている。そして一端部200a、大径部200c、偏心部200d、および他端部200bは、隣接する部材同士が互いに連結されている。
ロータコア201は、大径部200cの外壁に固定されている。そしてロータコア201は、周方向の45度毎に径外方向へ向けて突出する複数の突極(図示せず)を形成する。
平行軸歯車減速部4は、ドライブギヤ40、およびドライブギヤ40に噛み合うドリブンギヤ41から構成されている。
前ハウジング60は、ドライブギヤ40およびドリブンギヤ41の外側に設けられ、サイクロイド減速部3側に向けて開口する有底短筒状の樹脂製のハウジングである。前ハウジング60は、第1すべり軸受83が嵌合する有底嵌合孔600、および第2すべり軸受84が嵌合すると共にコントロールロッド72が挿入される貫通孔601を有している。また前ハウジング60は、第1すべり軸受83を介してドリブンギヤ41を回転可能に支持すると共に、第2転がり軸受81、ドリブンギヤ41、および第1すべり軸受83をそれぞれ介して駆動軸200の他端部200bを回転可能に支持している。また前ハウジング60は、第2すべり軸受84を介して出力軸5およびドリブンギヤ41を回転可能に支持している。
前ハウジング60の底部には、第3軸中心線φ3に平行な方向へ突出する円筒状突出部602が設けられている。この円筒状突出部602は、図示しないミッションケースの開口部内に挿入される。円筒状突出部602とミッションケースの開口部との間に形成される隙間は、円筒状突出部602の外周部に嵌めつけられたOリング86により液密に封止される。
後ハウジング本体620には、有底短筒部材621の他にもモータ2およびエンコーダ75からの配線部材622がインサートモールドされている。後ハウジング本体620には径外方向へ突設するコネクタ623が設けられており、配線部材622は後ハウジング本体620の底部を通ってコネクタ623内まで延びている。ECU71からの配線を収容する図示しないコネクタとコネクタ623とが接続されることにより、モータ2およびエンコーダ75がECU71に電気的に接続されるようになっている。
中ハウジング61の一部を切り欠いて断面で示す図4のように、環状プレート611は、回止め突起300に係合してリングギヤ30の回動を規制する複数の係合溝部611aと、回止め突起300を除くリングギヤ30の外壁すべての径外方向に設けられ、そのリングギヤ30が嵌合する複数の嵌合壁部611bとを有している。そして環状プレート611は、リングギヤ30の径外方向でリングギヤ30全周に亘りそのリングギヤ30の径方向の変位を規制するリングギヤ保持内壁612を有している。このリングギヤ保持内壁612は、係合溝部611aおよび嵌合壁部611bの内壁からなる。リングギヤ30は、リングギヤ保持内壁612に圧入されており、回止め突起300を除く外壁のすべてが環状プレート611に保持されている。
なお、出力軸5と同軸上に設けられ中ハウジング本体610に嵌合されたオイルシール92は、その内側に挿入されるコントロールロッド72の先端部との間の隙間を液密に封止する。
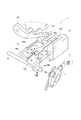
第1工程では、図7に矢印Aで示すように後ハウジング62にステータ21が組み付けられる。第2工程では、中ハウジング61にリングギヤ30が組み付けられる。第3工程では、図7に矢印Bで示すようにロータ20、プラネタリギヤ31、およびドライブギヤ40のサブアッシーが前ハウジング60に組み付けられ、続いて図7に矢印Cで示すようにドリブンギヤ41が前ハウジング60に組み付けられる。なお、第1工程〜第3工程の順序は入れ替えても差し支えない。
また、ドライブギヤ40とドリブンギヤ41との間の減速比を適宜設定することにより出力軸5からの出力トルクを大きくすることができる。
第2実施形態のアクチュエータの模式的な縦断面を図8に示す。第2実施形態では、外郭部材は、平行軸歯車減速部4および出力軸5を主に収容する前ハウジング60、サイクロイド減速部3およびモータ2を主に収容する一体ハウジング63の2つのハウジングから構成されている。
一体ハウジング63は、第1実施形態の中ハウジング61および後ハウジング62が一体となった形状を有している。この一体ハウジング63は、駆動軸200の端部を回転可能に支持し、ステータ21の外壁を保持する。また一体ハウジング63は、リングギヤの全外周に亘り連続して形成され、リングギヤと当接することでそのリングギヤの径方向の変位を規制するリングギヤ保持内壁630を有している。リングギヤは、リングギヤ保持内壁630に圧入される。
上述の第1および第2実施形態のアクチュエータは、シフトバイワイヤシステム7に備えられ、マニュアルバルブ70を駆動して変速機のシフトレンジを切り換えるシフトバイワイヤ用アクチュエータであった。これに対し本発明の他の実施形態では、例えば車両の他のバルブ装置等の駆動部として用いてもよいし、例えば産業ロボットや工作機械などの他の装置の駆動部として用いてもよい。
また、係合溝部、嵌合壁部、およびリングギヤ保持内壁は、必ずしも環状プレートが形成する必要はなく、例えば中ハウジング本体が形成してもよい。
2 ・・・モータ
200 ・・・駆動軸
200a・・・一端部(駆動軸の一端)
200b・・・他端部(駆動軸の他端)
200d・・・偏心部(偏心軸)
201 ・・・ロータコア
21 ・・・ステータ
30 ・・・リングギヤ
31 ・・・プラネタリギヤ
310 ・・・トルク伝達用突起(回転伝達手段)
40 ・・・ドライブギヤ
402 ・・・トルク伝達用穴(回転伝達手段)
403 ・・・第1外歯(ドライブギヤの外歯)
41 ・・・ドリブンギヤ
412 ・・・第2外歯(ドリブンギヤの外歯)
5 ・・・出力軸
60 ・・・前ハウジング
61 ・・・中ハウジング
62 ・・・後ハウジング
φ1 ・・・第1軸中心線(駆動軸の軸中心線)
φ2 ・・・第2軸中心線(偏心軸の軸中心線)
Claims (4)
- 回転可能な駆動軸、この駆動軸に固定されるロータコア 及び、前記ロータコアの径外方向に設けられるステータを有するモータと、
前記ステータを固定支持するとともに前記駆動軸の一端を回転可能に支持する後ハウジングと、
前記駆動軸に対し軸中心線が偏心するとともに両端が当該駆動軸に平行に連結される偏心軸と、
前記偏心軸の径外方向に前記駆動軸と同軸上に内歯を有するリングギヤと、
前記内歯に噛み合う外歯を有するとともに、前記偏心軸に対し回転可能にかつ前記駆動軸の軸中心線周りに公転可能に支持されるプラネタリギヤと、
前記プラネタリギヤの軸方向反ロータコア側で前記駆動軸と同軸上に回転可能に支持されるドライブギヤと、
前記プラネタリギヤの自転成分を前記ドライブギヤに伝達する回転伝達手段と、
前記ドライブギヤの外歯に噛み合う外歯を有するドリブンギヤと、
前記ドリブンギヤに連結され、前記駆動軸に平行に設けられる出力軸と、
前記ドライブギヤ、前記ドリブンギヤ、前記出力軸、および前記駆動軸の他端を回転可能に支持する前ハウジングと、
前記前ハウジングと前記後ハウジングとの間に設けられ、前記リングギヤの径外方向で前記リングギヤ全周に亘り前記リングギヤの径方向の変位を規制する中ハウジングと、を備え、
前記後ハウジングと前記前ハウジングと前記中ハウジングとは別部材で構成され、
前記中ハウジングは、樹脂製の中ハウジング本体と、前記中ハウジング本体に埋め込まれ、前記リングギヤの径方向の変位を規制するリングギヤ保持内壁を有する金属製の環状部材とからなることを特徴とする回転式アクチュエータ。 - 前記回転伝達手段は、前記プラネタリギヤと前記ドライブギヤとの一方に設けられる係合部と、前記プラネタリギヤと前記ドライブギヤとの他方に設けられ前記係合部と係合関係にある被係合部とから構成されることを特徴とする請求項1に記載の回転式アクチュエータ。
- 前記係合部は、前記プラネタリギヤに前記偏心軸の軸中心線と同心円上に設けられる複数のトルク伝達用突起であり、
前記被係合部は、前記ドライブギヤに前記駆動軸の軸中心線と同心円上に設けられる複数のトルク伝達用穴であることを特徴とする請求項2に記載の回転式アクチュエータ。 - 前記中ハウジングと前記後ハウジングとの間に設けられる環状シール部材をさらに備え、
前記環状部材は、前記環状シール部材に対し径方向で重なるように設けられていることを特徴とする請求項1〜3のいずれか一項に記載の回転式アクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011084571A JP5648564B2 (ja) | 2011-04-06 | 2011-04-06 | 回転式アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011084571A JP5648564B2 (ja) | 2011-04-06 | 2011-04-06 | 回転式アクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012222902A JP2012222902A (ja) | 2012-11-12 |
| JP5648564B2 true JP5648564B2 (ja) | 2015-01-07 |
Family
ID=47273862
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011084571A Active JP5648564B2 (ja) | 2011-04-06 | 2011-04-06 | 回転式アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5648564B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10371257B2 (en) | 2015-11-30 | 2019-08-06 | Denso Corporation | Rotational drive apparatus and shift-by-wire system having the same |
| US10502305B2 (en) | 2016-12-20 | 2019-12-10 | Denso Corporation | Rotary actuator |
| US10563760B2 (en) | 2016-10-25 | 2020-02-18 | Denso Corporation | Rotary actuator, rotation driving device, and shift-by-wire system using same |
| KR20210132519A (ko) | 2020-04-27 | 2021-11-04 | 캄텍주식회사 | 차량용 전자식 변속기 제어용 액츄에이터 |
| US11460105B2 (en) | 2020-06-16 | 2022-10-04 | Aisin Corporation | Shift device |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6580375B2 (ja) | 2015-05-29 | 2019-09-25 | 日本電産トーソク株式会社 | 車両用シフトレンジ切り替え装置 |
| JP6506147B2 (ja) * | 2015-09-18 | 2019-04-24 | トヨタ自動車株式会社 | 回転式アクチュエータ |
| JP6485365B2 (ja) * | 2016-01-12 | 2019-03-20 | 株式会社デンソー | 回転式アクチュエータ |
| JP7155767B2 (ja) * | 2018-09-05 | 2022-10-19 | 日本電産トーソク株式会社 | 電動アクチュエータ |
| JP7205405B2 (ja) * | 2019-07-02 | 2023-01-17 | 株式会社デンソー | 回転式アクチュエータ |
| DE102019132499A1 (de) * | 2019-11-29 | 2021-06-02 | Valeo Siemens Eautomotive Germany Gmbh | Getriebeeinrichtung für ein elektrisch antreibbares Fahrzeug, Antriebseinrichtung für ein elektrisch antreibbares Fahrzeug und Fahrzeug |
| CN113944737B (zh) * | 2020-07-17 | 2023-08-01 | 深圳市肯綮科技有限公司 | 一种扁平动力装置及助力装置 |
| JP2025152957A (ja) * | 2024-03-29 | 2025-10-10 | 株式会社アドヴィックス | モータ装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4218561B2 (ja) * | 2004-03-22 | 2009-02-04 | 株式会社デンソー | リング保持装置およびその製造方法 |
| JP4883339B2 (ja) * | 2005-03-25 | 2012-02-22 | アイシン精機株式会社 | ギヤハウジング |
-
2011
- 2011-04-06 JP JP2011084571A patent/JP5648564B2/ja active Active
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10371257B2 (en) | 2015-11-30 | 2019-08-06 | Denso Corporation | Rotational drive apparatus and shift-by-wire system having the same |
| US10563760B2 (en) | 2016-10-25 | 2020-02-18 | Denso Corporation | Rotary actuator, rotation driving device, and shift-by-wire system using same |
| US10502305B2 (en) | 2016-12-20 | 2019-12-10 | Denso Corporation | Rotary actuator |
| KR20210132519A (ko) | 2020-04-27 | 2021-11-04 | 캄텍주식회사 | 차량용 전자식 변속기 제어용 액츄에이터 |
| US11460105B2 (en) | 2020-06-16 | 2022-10-04 | Aisin Corporation | Shift device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012222902A (ja) | 2012-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5648564B2 (ja) | 回転式アクチュエータ | |
| JP5488931B2 (ja) | 回転式アクチュエータ | |
| JP5943955B2 (ja) | レンジ切り替え装置 | |
| JP5984898B2 (ja) | レンジ切り替え装置 | |
| JP4560743B2 (ja) | 回転式アクチュエータ | |
| US9236780B2 (en) | Rotary actuator with lined bearing holder | |
| JP7172823B2 (ja) | 回転式アクチュエータ | |
| JP5692606B2 (ja) | 回転式アクチュエータ | |
| JP6327137B2 (ja) | 回転式アクチュエータ | |
| US20120255385A1 (en) | Gear device and rotary actuator having the same | |
| JP2010159828A (ja) | 回転式アクチュエータおよびその製造方法 | |
| US11441676B2 (en) | Rotary actuator | |
| JP2011112114A (ja) | 噛み合いクラッチ装置 | |
| JP5381882B2 (ja) | 回転式アクチュエータ | |
| US11079012B2 (en) | Rotary actuator | |
| US11519500B2 (en) | Rotary actuator | |
| JP6673142B2 (ja) | 回転駆動装置、および、それを用いたシフトバイワイヤシステム | |
| WO2016017417A1 (ja) | シフトレンジ切替装置 | |
| JP7172824B2 (ja) | 回転式アクチュエータ | |
| JP6116735B1 (ja) | レンジ切替装置 | |
| JP2009165332A (ja) | アクチュエータ | |
| JP2009228805A (ja) | アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130415 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140318 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140515 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141014 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141027 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5648564 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |