JP2016199155A - 車両 - Google Patents
車両 Download PDFInfo
- Publication number
- JP2016199155A JP2016199155A JP2015080723A JP2015080723A JP2016199155A JP 2016199155 A JP2016199155 A JP 2016199155A JP 2015080723 A JP2015080723 A JP 2015080723A JP 2015080723 A JP2015080723 A JP 2015080723A JP 2016199155 A JP2016199155 A JP 2016199155A
- Authority
- JP
- Japan
- Prior art keywords
- engine
- torque
- motor
- creep
- motor generator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005540 biological transmission Effects 0.000 claims description 14
- 230000007423 decrease Effects 0.000 claims description 6
- 230000035939 shock Effects 0.000 abstract description 11
- 238000000034 method Methods 0.000 description 10
- 239000003921 oil Substances 0.000 description 5
- 238000010248 power generation Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 239000010720 hydraulic oil Substances 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 238000002485 combustion reaction Methods 0.000 description 2
- 230000000052 comparative effect Effects 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/20—Control strategies involving selection of hybrid configuration, e.g. selection between series or parallel configuration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/13—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/40—Controlling the engagement or disengagement of prime movers, e.g. for transition between prime movers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18063—Creeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
- B60K2006/4825—Electric machine connected or connectable to gearbox input shaft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/38—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches
- B60K6/387—Actuated clutches, i.e. clutches engaged or disengaged by electric, hydraulic or mechanical actuating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0666—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/18—Propelling the vehicle
- B60Y2300/182—Selecting between different operative modes, e.g. comfort and performance modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/43—Control of engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/60—Control of electric machines, e.g. problems related to electric motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/42—Clutches or brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/60—Electric Machines, e.g. motors or generators
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/906—Motor or generator
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/912—Drive line clutch
- Y10S903/914—Actuated, e.g. engaged or disengaged by electrical, hydraulic or mechanical means
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/93—Conjoint control of different elements
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
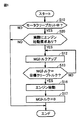
【解決手段】駆動輪に接続されるエンジンおよびモータジェネレータを備えた車両において、ECUは、クリープトルクをモータジェネレータによって発生するモータクリープモード中に所定条件が成立した場合、モータジェネレータのトルクを低下させるモータクリープカットを行なう。ECUは、モータクリープカット中にエンジン始動要求がある場合、モータジェネレータのトルクを目標クリープトルクまで予め定められた増加速度で増加させ、MGトルクが目標クリープトルクに達した後にエンジン10を始動させる。予め定められた増加速度は、エンジン始動時におけるエンジントルクの増加速度よりも遅い速度に設定される。
【選択図】図3
Description
図1は、本実施の形態による車両1の全体構成図である。車両1は、エンジン10と、モータジェネレータ(以下「MG」ともいう)20と、電力制御回路(以下「PCU(Power Control Unit)」という)21と、バッテリ22と、トルクコンバータ30と、自動変速機40と、油圧回路45と、駆動輪50と、エンジン切り離し用クラッチK0(以下、単に「クラッチK0」ともいう)と、MG切り離し用クラッチK2(以下、単に「クラッチK2」ともいう)と、ECU(Electronic Control Unit)100とを備える。
上述のように、モータクリープモード中にクリープカット条件が成立した場合、モータクリープカットが行なわれ、MGトルクが0となる。そのため、モータクリープカット中は、基本的には、バッテリ22の蓄電量(以下「SOC」という)がMG20によって消費されることはない。
(1) 上述の実施の形態では、モータクリープカット中にエンジン始動要求があると予測される場合にMGトルクアップを開始したが、実際にエンジン始動要求がなされた場合にMGトルクアップを開始するようにしてもよい。
Claims (4)
- 駆動輪へ動力伝達可能に配置されたエンジンと、
前記駆動輪へ動力伝達可能に配置されたモータジェネレータと、
クリープトルクを前記モータジェネレータによって発生するモータクリープモード中に所定条件が成立した場合、前記モータジェネレータのトルクを低下させるモータクリープカットを行なう制御装置とを備え、
前記制御装置は、前記モータクリープカット中にエンジン始動要求がある場合、前記モータジェネレータのトルクを目標クリープトルクに向けて予め定められた増加速度で増加させ、前記モータジェネレータのトルクが前記目標クリープトルクに達した後に前記エンジンを始動させ、前記エンジンを始動させた後は前記エンジンのトルクと前記モータジェネレータのトルクとの合計が前記目標クリープトルクとなるように前記エンジンおよび前記モータジェネレータを制御し、
前記予め定められた増加速度は、前記エンジンの始動時の前記エンジンのトルクの増加速度よりも遅い速度に設定される、車両。 - 前記モータジェネレータは、前記エンジンの動力を用いて発電可能であり、
前記車両は、前記モータジェネレータとの間で電力を授受可能なバッテリをさらに備え、
前記制御装置は、前記バッテリの蓄電量が所定値未満に低下した場合に、前記エンジン始動要求があると判定する、請求項1に記載の車両。 - 前記車両は、
前記エンジンと前記駆動輪との間に設けられた自動変速機と、
前記エンジンと前記自動変速機との間に設けられた回転軸と、
前記回転軸と前記エンジンとの間に設けられた第1クラッチと、
前記回転軸と前記モータとの間に設けられた第2クラッチとをさらに備え、
前記モータジェネレータは、前記エンジンから前記第1クラッチ、前記回転軸および前記第2クラッチを介して伝達される動力を用いて発電可能である、請求項1または2に記載の車両。 - 前記制御装置は、前記モータクリープカット中に前記エンジンを始動させた後は、前記モータジェネレータのトルクを0に低下させる、請求項1〜3のいずれかに記載の車両。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015080723A JP6187528B2 (ja) | 2015-04-10 | 2015-04-10 | 車両 |
| US15/092,368 US9637113B2 (en) | 2015-04-10 | 2016-04-06 | Vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015080723A JP6187528B2 (ja) | 2015-04-10 | 2015-04-10 | 車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016199155A true JP2016199155A (ja) | 2016-12-01 |
| JP6187528B2 JP6187528B2 (ja) | 2017-08-30 |
Family
ID=57111747
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015080723A Active JP6187528B2 (ja) | 2015-04-10 | 2015-04-10 | 車両 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9637113B2 (ja) |
| JP (1) | JP6187528B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020131788A (ja) * | 2019-02-14 | 2020-08-31 | トヨタ自動車株式会社 | 車載制御装置 |
| JP7509670B2 (ja) | 2020-12-04 | 2024-07-02 | トヨタ自動車株式会社 | 車両の制御装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2590962B (en) * | 2020-01-09 | 2022-06-15 | Jaguar Land Rover Ltd | Hybrid vehicle speed and torque control |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0614445U (ja) * | 1992-07-30 | 1994-02-25 | 富士重工業株式会社 | ハイブリッド車 |
| JPH11299006A (ja) * | 1998-04-13 | 1999-10-29 | Aisin Aw Co Ltd | ハイブリッド車両のクリープ走行制御装置 |
| JP2000274273A (ja) * | 1999-03-19 | 2000-10-03 | Nissan Motor Co Ltd | 車両のエンジン自動停止再始動装置 |
| US20010013701A1 (en) * | 2000-02-15 | 2001-08-16 | Taiichi Onoyama | Automatic stop/restart device of vehicle engine |
| JP2003235107A (ja) * | 2002-02-04 | 2003-08-22 | Nissan Motor Co Ltd | 車両の制御装置 |
| JP2003237383A (ja) * | 2002-02-13 | 2003-08-27 | Nissan Diesel Motor Co Ltd | 車両のハイブリッドシステム |
| JP2009273325A (ja) * | 2008-05-09 | 2009-11-19 | Toyota Motor Corp | ハイブリッド車およびその制御方法 |
| JP2011105039A (ja) * | 2009-11-12 | 2011-06-02 | Mitsubishi Fuso Truck & Bus Corp | ハイブリッド式車両の駆動制御装置 |
| US20130012355A1 (en) * | 2011-07-05 | 2013-01-10 | Ford Global Technologies, Llc | Controlling Vehicle Creep |
| JP2013091466A (ja) * | 2011-10-27 | 2013-05-16 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3815096B2 (ja) * | 1998-12-28 | 2006-08-30 | 日産自動車株式会社 | アイドルストップシステムのブレーキ操作検出方法 |
| JP3589202B2 (ja) * | 2001-07-13 | 2004-11-17 | 日産自動車株式会社 | 4輪駆動車両の駆動力制御装置 |
| JP3589208B2 (ja) * | 2001-08-13 | 2004-11-17 | 日産自動車株式会社 | ハイブリッド車両の駆動装置 |
| JP3536838B2 (ja) * | 2002-01-11 | 2004-06-14 | 日産自動車株式会社 | 車両の駆動力制御装置 |
| US7000998B2 (en) * | 2002-01-18 | 2006-02-21 | Hitachi, Ltd. | Brake control apparatus and method |
| US7035727B2 (en) * | 2002-05-29 | 2006-04-25 | Visteon Global Technologies, Inc. | Apparatus and method of controlling vehicle creep control under braking |
| JP3610970B2 (ja) * | 2002-08-30 | 2005-01-19 | 日産自動車株式会社 | 四輪駆動車両の駆動力制御装置 |
| EP1813492B1 (en) * | 2006-01-26 | 2012-11-21 | Fuji Jukogyo Kabushiki Kaisha | Vehicle control system |
| DE102008061790A1 (de) * | 2008-12-11 | 2010-07-08 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum automatischen Abschalten und Starten einer Brennkraftmaschine |
| JP5402901B2 (ja) * | 2010-09-30 | 2014-01-29 | 株式会社デンソー | エンジン制御装置 |
| KR101434123B1 (ko) * | 2010-10-21 | 2014-08-25 | 닛산 지도우샤 가부시키가이샤 | 하이브리드 차량의 제어 장치 |
| WO2012098658A1 (ja) * | 2011-01-20 | 2012-07-26 | トヨタ自動車株式会社 | ハイブリッド車両およびその制御方法 |
| JP5178879B2 (ja) * | 2011-05-19 | 2013-04-10 | 三菱電機株式会社 | 車両用駆動制御装置 |
| WO2013061437A1 (ja) * | 2011-10-27 | 2013-05-02 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
-
2015
- 2015-04-10 JP JP2015080723A patent/JP6187528B2/ja active Active
-
2016
- 2016-04-06 US US15/092,368 patent/US9637113B2/en active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0614445U (ja) * | 1992-07-30 | 1994-02-25 | 富士重工業株式会社 | ハイブリッド車 |
| JPH11299006A (ja) * | 1998-04-13 | 1999-10-29 | Aisin Aw Co Ltd | ハイブリッド車両のクリープ走行制御装置 |
| JP2000274273A (ja) * | 1999-03-19 | 2000-10-03 | Nissan Motor Co Ltd | 車両のエンジン自動停止再始動装置 |
| US6275759B1 (en) * | 1999-03-19 | 2001-08-14 | Nissan Motor Co., Ltd. | Automatic engine stop and restart system for vehicle |
| US20010013701A1 (en) * | 2000-02-15 | 2001-08-16 | Taiichi Onoyama | Automatic stop/restart device of vehicle engine |
| JP2001227373A (ja) * | 2000-02-15 | 2001-08-24 | Nissan Motor Co Ltd | 車両のエンジン自動停止再始動装置 |
| JP2003235107A (ja) * | 2002-02-04 | 2003-08-22 | Nissan Motor Co Ltd | 車両の制御装置 |
| JP2003237383A (ja) * | 2002-02-13 | 2003-08-27 | Nissan Diesel Motor Co Ltd | 車両のハイブリッドシステム |
| JP2009273325A (ja) * | 2008-05-09 | 2009-11-19 | Toyota Motor Corp | ハイブリッド車およびその制御方法 |
| JP2011105039A (ja) * | 2009-11-12 | 2011-06-02 | Mitsubishi Fuso Truck & Bus Corp | ハイブリッド式車両の駆動制御装置 |
| US20130012355A1 (en) * | 2011-07-05 | 2013-01-10 | Ford Global Technologies, Llc | Controlling Vehicle Creep |
| JP2013091466A (ja) * | 2011-10-27 | 2013-05-16 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020131788A (ja) * | 2019-02-14 | 2020-08-31 | トヨタ自動車株式会社 | 車載制御装置 |
| US11325577B2 (en) | 2019-02-14 | 2022-05-10 | Toyota Jidosha Kabushiki Kaisha | On-board controller and method for controlling vehicle |
| JP7200729B2 (ja) | 2019-02-14 | 2023-01-10 | トヨタ自動車株式会社 | 車載制御装置 |
| JP7509670B2 (ja) | 2020-12-04 | 2024-07-02 | トヨタ自動車株式会社 | 車両の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160297425A1 (en) | 2016-10-13 |
| US9637113B2 (en) | 2017-05-02 |
| JP6187528B2 (ja) | 2017-08-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1452376A2 (en) | Hybrid-powered vehicle | |
| KR20070049987A (ko) | 하이브리드 차량의 엔진 재시동 제어 장치 | |
| JP2007223421A (ja) | ハイブリッド電気自動車の制御装置 | |
| JP6341238B2 (ja) | 自動車 | |
| EP2695784A1 (en) | Hybrid vehicle and method for controlling the same | |
| JPWO2014091588A1 (ja) | ハイブリッド車両の制御装置 | |
| JP2011213310A (ja) | 車両制御システム | |
| US11584359B2 (en) | Control device of hybrid vehicle and control method | |
| KR20180112950A (ko) | 차량의 구동 장치를 제어하는 방법 및 장치 | |
| JP6187528B2 (ja) | 車両 | |
| US20190323474A1 (en) | Starter system and method of control | |
| JP4472935B2 (ja) | 車両の制御装置 | |
| JP2000287304A (ja) | 内燃機関の駆動装置 | |
| WO2015166818A1 (ja) | エンジンの始動制御装置 | |
| JP2021109609A (ja) | ハイブリッド車両 | |
| CN110997438B (zh) | 车辆的控制装置及控制方法 | |
| JP7513881B2 (ja) | 自動変速制御装置 | |
| KR101713727B1 (ko) | 하이브리드 차량 및 하이브리드 차량의 제어 방법 | |
| JP7484616B2 (ja) | 自動変速制御装置 | |
| JP7559465B2 (ja) | 自動変速制御装置 | |
| JP7513882B2 (ja) | 自動変速制御装置 | |
| KR20190046078A (ko) | 하이브리드 차량의 엔진 시동을 위한 제어 방법 | |
| US11702064B2 (en) | Hybrid vehicle | |
| JP4427945B2 (ja) | 車両の制御装置および制御方法 | |
| JP5998921B2 (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170606 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170717 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6187528 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |