JP2016194467A - 物理量センサーの検査方法及び物理量センサーの製造方法 - Google Patents
物理量センサーの検査方法及び物理量センサーの製造方法 Download PDFInfo
- Publication number
- JP2016194467A JP2016194467A JP2015074861A JP2015074861A JP2016194467A JP 2016194467 A JP2016194467 A JP 2016194467A JP 2015074861 A JP2015074861 A JP 2015074861A JP 2015074861 A JP2015074861 A JP 2015074861A JP 2016194467 A JP2016194467 A JP 2016194467A
- Authority
- JP
- Japan
- Prior art keywords
- level
- signal
- physical quantity
- drive
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
- G01C19/5726—Signal processing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5776—Signal processing not specific to any of the devices covered by groups G01C19/5607 - G01C19/5719
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C25/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass
- G01C25/005—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass initial alignment, calibration or starting-up of inertial devices
Abstract
Description
<物理量センサーの概略構成>
まず、物理量センサーの好適例としての角速度センサー1の概略構成について説明する。角速度センサー1は、与えられた回転の角速度を検出するセンサーである。
図1は、角速度センサー1の概略図である。角速度センサー1は、角速度検出素子10、駆動回路20、及び検出回路30などによって構成されている。
第1連結腕131及び第2連結腕132は、基部101から、第1検出腕121及び第2検出腕122が延出している方向と交差する方向に沿って、互いに逆向きに延出している。
駆動部11は、第1駆動腕111、第2駆動腕112、第3駆動腕113、及び第4駆動腕114を備えている。第1駆動腕111及び第2駆動腕112は、第1検出腕121及び第2検出腕122が延出している方向に沿って、第1連結腕131から互いに逆向きに延出している。第3駆動腕113及び第4駆動腕114は、第1検出腕121及び第2検出腕122が延出している方向に沿って、第2連結腕132から互いに逆向きに延出している。
図2は、駆動回路20が備えるAGC回路21の回路図である。AGC回路21は、ハイパスフィルター211、全波整流回路212、比較調整回路213、切替回路214、外部電圧入力電極215、基準電圧入力電極216、及び駆動信号生成回路217などによって構成されている。
ハイパスフィルター211は、電流電圧変換回路23の出力信号に含まれるオフセット電圧を低減するとともに、駆動回路20及び角速度検出素子10が発振ループを形成するための位相調整の機能を果たす。ハイパスフィルター211の出力信号は、駆動信号生成回路217に入力される。
全波整流回路212は、電流電圧変換回路23から入力された交流電圧信号を全波整流する。全波整流回路212の出力信号は、比較調整回路213に入力される。
比較調整回路213は、全波整流回路212からの信号と、切替回路214からの信号と、の差を積分する。これにより、電流電圧変換回路23からの入力信号と、外部電圧Vex又は基準電圧VREFと、の比較に基づいた信号を駆動信号生成回路217に入力する。
図3は、角速度センサー1が備える検出回路30の回路図である。
検出回路30は、第1検出電極S1、第2検出電極S2、第1チャージアンプ301、第2チャージアンプ302、差動増幅回路303、交流増幅回路304、第1同期検波回路311、第1ローパスフィルター312、第1−1直流増幅回路313、第1スイッチトキャパシターフィルター314、第1−2直流増幅回路315、レシオメトリックアンプ316、第2同期検波回路321、第2ローパスフィルター322、第2−1直流増幅回路323、第2スイッチトキャパシターフィルター324、第2−2直流増幅回路325、閾値回路326、角速度信号出力端子Vout、漏れ信号出力端子Vmon、及び故障診断信号出力端子DIAGなどによって構成されている。
図4は、検出回路30における漏れ信号成分の波形を表す波形図である。図4には、図3に示すA〜Iの各点における漏れ信号の変化を示しており、横軸は時間を、縦軸は電圧を示す。図4では角速度信号成分は省略しており、漏れ信号成分のみを図示している。
C点(交流増幅回路304の出力)には、A点の出力信号とB点の出力信号とが差動増幅回路303によって差動増幅されたのち、交流増幅回路304によって増幅された信号が出力されている。
D点(第1同期検波回路311の検波入力)には、第1同期検波回路311が同期検波を行うための第1検波信号が入力される。第1検波信号の位相は、駆動信号の位相及びC点における漏れ信号成分の位相と略90°ずれている。
F点(レシオメトリックアンプ316の出力)には、E点の出力信号を第1ローパスフィルター312によって積分し、第1−1直流増幅回路313、第1スイッチトキャパシターフィルター314、第1−2直流増幅回路315、及びレシオメトリックアンプ316を介した信号が出力されている。E点の出力信号を積分すると、漏れ信号は相殺されるため、F点における出力信号に漏れ信号成分は寄与しない。すなわち、角速度信号出力端子Voutからの出力信号には、漏れ信号成分は含まれない。
H点(第2同期検波回路321の出力)には、C点の漏れ信号成分と、G点の第2検波信号と、を乗算した信号が出力されている。このため、H点の出力信号は図示の通り、C点の漏れ信号成分が全波整流された形となっている。
I点(第2−2直流増幅回路325の出力)には、H点の出力信号を第2ローパスフィルター322によって積分し、第2−1直流増幅回路323、第2スイッチトキャパシターフィルター324、及び第2−2直流増幅回路325を介した信号が出力される。従って、漏れ信号出力端子Vmonからは、漏れ振動の大きさに対応した漏れ信号出力Vmが出力される。
次に、本実施形態に係る物理量センサーとしての角速度センサー1の検査方法について説明する。
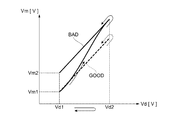
角速度センサー1の検査は、駆動信号の電圧レベルVdを可変にして、試験駆動信号として角速度検出素子10の駆動部11に印加し、電圧レベルVdを変化させながら、漏れ信号出力端子Vmonから出力される漏れ信号出力Vmを試験検出信号として測定することによって行われる。電圧レベルVdの変化に対する漏れ信号出力Vmの変化により、角速度検出素子10が良品であるか、不良品であるかの良否判定がなされる。
角速度センサー1の通常使用時には、AGC回路21は、基準電圧回路22から基準電圧入力電極216を介して入力される基準電圧VREFに基づいて駆動信号を生成している。
検査を行うに当たり、まず、切替回路制御信号によって、AGC回路21が備える切替回路214の接続を切り替える。これにより、基準電圧入力電極216からの信号でなく、外部電圧入力電極215からの信号が比較調整回路213に印加される状態とする。
一方、不良品は良品とは異なる挙動を示す。図5に示した例では、電圧レベルVdが上昇しても、異物によって駆動部11の振動振幅の増加が妨げられるため、漏れ信号出力Vmには大きな変化が見られない。
従って、電圧レベルVdに対する漏れ信号出力の変化率を算出し、その値が許容範囲に収まっているものを良品と判断し、許容範囲から外れているものを不良品と判断することにより、良品と不良品とを区別することができる。例えば、基準となる変化率を定めておき、変化率が基準の95%〜105%の範囲内に収まっているものを良品と判断し、それ以外を不良品と判断すればよい。
また、外部電圧Vexは、連続的に変化させてもよく、第1レベルVd1に対応する電圧値と第2レベルVd2に対応する電圧値との間を離散的に変化させてもよい。なお、外部電圧Vexの値としては、例えば1Vから2Vまで上昇させる構成を用いることができる。
また、上述の検査方法では電圧レベルVdを上昇させる構成として説明したが、電圧レベルVdを単調に変化させる構成であればよく、例えば第2レベルVd2から第1レベルVd1まで下降させたときの漏れ信号出力Vmの変化率に基づいて良否判定を行う構成であってもよい。
すなわち、駆動信号の電圧レベルVdの変化に対する漏れ信号出力Vmの変化によって良否判定を行うことで、バーンイン試験を行う場合などに比べて短時間で検査を行うことができる。また、駆動部11に印加する駆動信号の変化に対する検出部12からの出力信号の変化を調べるので、駆動部11及び検出部12のいずれに問題がある場合でも不良品と判断できる。従って、駆動部11及び検出部12の両方を同時に検査することができ、効率的な検査を行うことができる。
また、バーンイン試験を行う場合には、長時間に渡って高温度下に置く必要があったため、物理量検出素子以外の部品にダメージが残ってしまう可能性があった。これに対し、本実施形態に係る物理量センサーの検査方法によれば、他の部品にダメージを与えることなく物理量検出素子の良否判定を行うことができる。
次に、実施形態2に係る物理量センサーの検査方法について説明する。
なお、物理量センサーの好適例としての角速度センサー1の構成は実施形態1と同様である。また、電圧レベルVdの変化に対する漏れ信号出力Vmの変化により、角速度検出素子10が良品であるか、不良品であるかの良否判定がなされる点も実施形態1と同様である。
まず、実施形態1と同様に、切替回路制御信号によって切替回路214の接続を切り替える。これにより、外部電圧入力電極215からの信号が比較調整回路213に印加される状態とする。そして、外部の電圧源から外部端子VRに、可変の外部電圧Vexを印加する。
続いて、外部電圧Vexを下降させ、駆動信号の電圧レベルVdを第2レベルVd2から第1レベルVd1まで下降させる。同時に、漏れ信号出力Vmを測定し、電圧レベルVdの下降に対する漏れ信号出力Vmの変化を記録する。
一方、角速度検出素子10にクラック等の欠陥が存在する場合、良品とは異なる挙動を示す。すなわち、電圧レベルVdを第1レベルVd1から第2レベルVd2まで上昇させる過程において、角速度検出素子10の欠陥が拡大し、駆動部11の駆動振動の非対称性が増大する。このため、欠陥が拡大したときに、漏れ信号出力Vmがそれまでの変化率より大きい割合で変化する。その後、電圧レベルVdを第2レベルVd2から下降させても拡大した欠陥は元に戻らないため、漏れ信号出力Vmの変化にはヒステリシスが生じる。このため、電圧レベルVdを第1レベルVd1から上昇させ始めたときの漏れ信号出力Vm1と、電圧レベルVdを第2レベルVd2まで上昇させた後、第1レベルVd1まで下降させ終えたときの漏れ信号出力Vm2と、が異なる値となる。
すなわち、漏れ信号出力Vmの変化を調べることで、角速度検出素子10にクラック等の欠陥を有して潜在的に不良品となる可能性があるものを除去することができる。
また、上記の説明では電圧レベルVdを上昇させてから下降させる構成としたが、例えば電圧レベルVdを第2レベルVd2から第1レベルVd1まで下降させた後に第2レベルVd2まで上昇させ、下降を開始したときの漏れ信号出力Vmと、上昇を終了したときの漏れ信号出力Vmと、を比較するような構成であってもよい。
図7は、変形例1に係る物理量センサーの検査方法によって検査される、角速度センサー1aの概略図である。なお、角速度センサー1と同一の構成部位については、同一の番号を使用し、重複する説明は省略する。
角速度センサー1aは、駆動回路20aを備えている。駆動回路20aは、AGC回路21、基準電圧回路22a、及び電流電圧変換回路23などによって構成されている。
すなわち、基準電圧回路からn種類の基準電圧を入力することで駆動信号の電圧レベルVdを可変にすることができるので、外部の電圧源を必要とせず、簡易な構成で検査を行うことができる。
図8は、変形例2に係る物理量センサーの検査方法によって検査される、角速度センサー1bの概略図である。なお、角速度センサー1と同一の構成部位については、同一の番号を使用し、重複する説明は省略する。
角速度センサー1bは、検出回路30bを備えている。検出回路30bは、第1検出電極S1、第2検出電極S2、第1チャージアンプ301、第2チャージアンプ302、差動増幅回路303、交流増幅回路304、第1同期検波回路311、第1ローパスフィルター312、第1−1直流増幅回路313、第1スイッチトキャパシターフィルター314、第1−2直流増幅回路315、レシオメトリックアンプ316、角速度信号出力端子Vout、及び漏れ信号出力端子Vmonbなどによって構成されている。
すなわち、検出回路30bに漏れ信号成分を検出する回路構成を設けず、ロックインアンプ4によって漏れ信号成分を検出するため、角速度センサー1bの構成を簡易にすることができ、製造コストを抑えることができる。
<物理量センサーの製造方法>
図9は、物理量センサーの製造工程を表す工程図である。
ステップS10は、物理量検出素子やICチップを収容するためのパッケージを用意する工程である。パッケージは略直方体形状であり、セラミック材料で形成された本体部及び蓋部などによって構成されている。本体部には物理量検出素子やICチップを収容するための凹部が設けられており、蓋部は本体部を封止するためのロウ材などを備えている。
ステップS20は、ICチップを用意する工程である。ICチップはシリコン等の半導体基板から形成されており、駆動回路20(20a)及び検出回路30(30b)などを備えている。
ステップS30はICチップを実装する工程である。ICチップは、パッケージの本体部に載置され、好適例ではワイヤボンディングによって本体部に設けられた電極と電気的に接続される。
ステップS50は、物理量検出素子を実装する工程である。物理量検出素子は、ICチップの上方に配置されたタブテープの上に配置され、タブテープによって支持されるとともにICチップと電気的に接続される。
ステップS60は調整工程であり、物理量検出素子にレーザーを照射して振動部の重さを調整し、共振周波数や漏れ信号出力の調整が行われる。
ステップS70は封止工程であり、パッケージの本体部が蓋部によって封止される。
ステップS80は検査工程であり、実施形態1,2及び変形例1,2で説明した検査によって物理量検出素子の良否判定が行われる。
すなわち、ステップS80において、駆動信号の電圧レベルVdの変化に対する漏れ信号出力Vmの変化に基づいた検査を行うので、バーンイン試験を行う場合より短時間で検査工程を終わらせることができる。従って、効率が良い製造方法を提供することができる。
上記実施形態及び変形例では物理量センサーとして角速度センサー1(1a,1b)を例にとって説明したが、本発明に係る物理量センサーは検出部の振動に基づいて物理量を検出するセンサーであればよい。例えば、振動子を用いた加速度センサーや圧力センサーであってもよい。
また、上記実施形態及び変形例では、角速度検出素子10は水晶を材料として形成されているとしたが、例えばシリコンの単結晶によって形成されていてもよい。
Claims (12)
- 物理量に応じて検出振動を行う検出部を有する物理量検出素子に、電圧レベルを変化させながら試験駆動信号を印加し、
前記試験駆動信号に応じた前記検出部からの出力信号を試験検出信号として検出し、
前記電圧レベルの変化に対する前記試験検出信号の変化に基づいて良否判定を行う、物理量センサーの検査方法。 - 前記物理量検出素子が、前記試験駆動信号が印加されて駆動振動を行う駆動部をさらに有しており、
前記試験検出信号は、前記駆動部の前記駆動振動に基づいて前記検出部から出力される漏れ信号であることを特徴とする請求項1に記載の物理量センサーの検査方法。 - 前記電圧レベルを、第1レベルから、前記第1レベルより大きい第2レベルに上昇させたときの、前記電圧レベルに対する前記試験検出信号の電圧の変化率に基づいて良否判定を行うことを特徴とする請求項1又は2に記載の物理量センサーの検査方法。
- 前記電圧レベルを、第1レベルから、前記第1レベルより大きい第2レベルに上昇させ、
前記電圧レベルを、前記第2レベルから、前記第1レベルに下降させ、
前記電圧レベルが前記第1レベルから上昇するときの前記試験検出信号の電圧と、前記電圧レベルが前記第1レベルまで下降したときの前記試験検出信号の電圧と、の差に基づいて良否判定を行うことを特徴とする請求項1又は2に記載の物理量センサーの検査方法。 - 前記物理量センサーが、前記駆動部に前記駆動振動を行わせる駆動回路をさらに備えており、
前記駆動回路は、外部から入力される可変の外部電圧に基づいて前記試験駆動信号を生成することを特徴とする請求項2乃至4のいずれか一項に記載の物理量センサーの検査方法。 - 前記物理量センサーが、前記駆動部に前記駆動振動を行わせる駆動回路をさらに備えており、
前記駆動回路は、第1基準電圧から第n基準電圧(nは2以上の整数)の異なるn種類の基準電圧を生成可能な基準電圧回路を備え、
前記試験駆動信号の前記電圧レベルは、前記基準電圧に基づくことを特徴とする請求項2乃至4のいずれか一項に記載の物理量センサーの検査方法。 - 物理量に応じて検出振動を行う検出部を有する物理量検出素子に、電圧レベルを変化させながら試験駆動信号を印加し、
前記試験駆動信号に応じた前記検出部からの出力信号を試験検出信号として検出し、
前記電圧レベルの変化に対する前記試験検出信号の変化に基づいて良否判定を行う検査工程を含んでいる、物理量センサーの製造方法。 - 前記物理量検出素子が、前記試験駆動信号が印加されて駆動振動を行う駆動部をさらに有しており、
前記試験検出信号は、前記駆動部の前記駆動振動に基づいて前記検出部から出力される漏れ信号であることを特徴とする請求項7に記載の物理量センサーの製造方法。 - 前記電圧レベルを、第1レベルから、前記第1レベルより大きい第2レベルに上昇させたときの、前記電圧レベルに対する前記試験検出信号の電圧の変化率に基づいて良否判定を行うことを特徴とする請求項7又は8に記載の物理量センサーの製造方法。
- 前記電圧レベルを、第1レベルから、前記第1レベルより大きい第2レベルに上昇させ、
前記電圧レベルを、前記第2レベルから、前記第1レベルに下降させ、
前記電圧レベルが前記第1レベルから上昇するときの前記試験検出信号の電圧と、前記電圧レベルが前記第1レベルまで下降したときの前記試験検出信号の電圧と、の差に基づいて良否判定を行うことを特徴とする請求項7又は8に記載の物理量センサーの製造方法。 - 前記物理量センサーが、前記駆動部に前記駆動振動を行わせる駆動回路をさらに備えており、
前記駆動回路は、外部から入力される可変の外部電圧に基づいて前記試験駆動信号を生成することを特徴とする請求項8乃至10のいずれか一項に記載の物理量センサーの製造方法。 - 前記物理量センサーが、前記駆動部に前記駆動振動を行わせる駆動回路をさらに備えており、
前記駆動回路は、第1基準電圧から第n基準電圧(nは2以上の整数)の異なるn種類の基準電圧を生成可能な基準電圧回路を備え、
前記試験駆動信号の前記電圧レベルは、前記基準電圧に基づくことを特徴とする請求項8乃至10のいずれか一項に記載の物理量センサーの製造方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015074861A JP2016194467A (ja) | 2015-04-01 | 2015-04-01 | 物理量センサーの検査方法及び物理量センサーの製造方法 |
| US15/075,656 US10041796B2 (en) | 2015-04-01 | 2016-03-21 | Method for inspecting physical quantity sensor and method for manufacturing physical quantity sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015074861A JP2016194467A (ja) | 2015-04-01 | 2015-04-01 | 物理量センサーの検査方法及び物理量センサーの製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016194467A true JP2016194467A (ja) | 2016-11-17 |
| JP2016194467A5 JP2016194467A5 (ja) | 2018-04-19 |
Family
ID=57017446
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015074861A Withdrawn JP2016194467A (ja) | 2015-04-01 | 2015-04-01 | 物理量センサーの検査方法及び物理量センサーの製造方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10041796B2 (ja) |
| JP (1) | JP2016194467A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10101158B2 (en) | 2015-04-24 | 2018-10-16 | Seiko Epson Corporation | Circuit for physical quantity sensor, physical quantity sensor, and method for manufacturing physical quantity sensor |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6586735B2 (ja) * | 2015-02-20 | 2019-10-09 | セイコーエプソン株式会社 | 回路装置、物理量検出装置、電子機器及び移動体 |
| JP6492739B2 (ja) | 2015-02-20 | 2019-04-03 | セイコーエプソン株式会社 | 回路装置、物理量検出装置、電子機器及び移動体 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09236436A (ja) * | 1996-03-01 | 1997-09-09 | Nissan Motor Co Ltd | 角速度センサの自己診断方法 |
| JP2002526761A (ja) * | 1998-10-01 | 2002-08-20 | エーアーデーエス・ドイチュラント・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 共振構造を有するセンサ、特に加速度センサ又は回転速度センサ、並びに自己試験をするための装置及び方法 |
| US20050091006A1 (en) * | 2003-10-22 | 2005-04-28 | Rober Stephen J. | Electronic sensor with signal conditioning |
| JP2005233706A (ja) * | 2004-02-18 | 2005-09-02 | Matsushita Electric Ind Co Ltd | 角速度センサ |
| US20100219839A1 (en) * | 2008-12-30 | 2010-09-02 | Colin Findlay Steele | Apparatus and method for testing a capacitive transducer and/or associated electronic circuitry |
| JP2010286368A (ja) * | 2009-06-12 | 2010-12-24 | Epson Toyocom Corp | 物理量検出装置並びに物理量検出装置の制御方法、異常診断システム及び異常診断方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004027435A1 (en) * | 2002-09-18 | 2004-04-01 | Carnegie Mellon University | Built-in self test of mems |
| EP1959233A1 (en) * | 2007-02-13 | 2008-08-20 | STMicroelectronics S.r.l. | Microelectromechanical gyroscope with self-test function and control method of a microelectromechanical gyroscope |
| US9714842B2 (en) * | 2011-09-16 | 2017-07-25 | Invensense, Inc. | Gyroscope self test by applying rotation on coriolis sense mass |
| US9069006B2 (en) * | 2012-04-05 | 2015-06-30 | Fairchild Semiconductor Corporation | Self test of MEMS gyroscope with ASICs integrated capacitors |
| US20140074418A1 (en) * | 2012-09-13 | 2014-03-13 | Freescale Semiconductor, Inc. | Method and system for calibrating an inertial sensor |
| JP6222423B2 (ja) | 2013-03-28 | 2017-11-01 | セイコーエプソン株式会社 | 物理量センサー、電子機器及び移動体 |
| DE102014225844A1 (de) * | 2014-12-15 | 2016-06-16 | Robert Bosch Gmbh | Verfahren zum Testen der Funktionalität eines Drehratensensors |
-
2015
- 2015-04-01 JP JP2015074861A patent/JP2016194467A/ja not_active Withdrawn
-
2016
- 2016-03-21 US US15/075,656 patent/US10041796B2/en not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09236436A (ja) * | 1996-03-01 | 1997-09-09 | Nissan Motor Co Ltd | 角速度センサの自己診断方法 |
| JP2002526761A (ja) * | 1998-10-01 | 2002-08-20 | エーアーデーエス・ドイチュラント・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 共振構造を有するセンサ、特に加速度センサ又は回転速度センサ、並びに自己試験をするための装置及び方法 |
| US20050091006A1 (en) * | 2003-10-22 | 2005-04-28 | Rober Stephen J. | Electronic sensor with signal conditioning |
| JP2006515423A (ja) * | 2003-10-22 | 2006-05-25 | モトローラ・インコーポレイテッド | 信号処理を有する電子センサ |
| JP2005233706A (ja) * | 2004-02-18 | 2005-09-02 | Matsushita Electric Ind Co Ltd | 角速度センサ |
| US20100219839A1 (en) * | 2008-12-30 | 2010-09-02 | Colin Findlay Steele | Apparatus and method for testing a capacitive transducer and/or associated electronic circuitry |
| JP2010286368A (ja) * | 2009-06-12 | 2010-12-24 | Epson Toyocom Corp | 物理量検出装置並びに物理量検出装置の制御方法、異常診断システム及び異常診断方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10101158B2 (en) | 2015-04-24 | 2018-10-16 | Seiko Epson Corporation | Circuit for physical quantity sensor, physical quantity sensor, and method for manufacturing physical quantity sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| US10041796B2 (en) | 2018-08-07 |
| US20160290828A1 (en) | 2016-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8375790B2 (en) | Physical quantity detection apparatus, method of controlling physical quantity detection apparatus, abnormality diagnosis system, and abnormality diagnosis method | |
| JP4752952B2 (ja) | 力学量センサ、及び該力学量センサの製造方法 | |
| JP5075930B2 (ja) | 電荷変化型センサの出力回路 | |
| JP2011095104A (ja) | 静電容量式センサ | |
| JP6524679B2 (ja) | 水晶振動子の検査方法 | |
| JP6680093B2 (ja) | 水晶発振器及び水晶振動子の特性測定方法 | |
| US10041796B2 (en) | Method for inspecting physical quantity sensor and method for manufacturing physical quantity sensor | |
| JP4645725B2 (ja) | 振動型角速度センサの角速度検出方法 | |
| JP2010232974A (ja) | 圧電発振器 | |
| EP1821127A1 (en) | Deformable mirror | |
| JP6528523B2 (ja) | 物理量センサー用回路、物理量センサー、及び物理量センサーの製造方法 | |
| JP2010286371A (ja) | 物理量検出装置、物理量検出装置の異常診断システム及び物理量検出装置の異常診断方法 | |
| JP5360676B2 (ja) | 角速度検出装置の製造方法 | |
| JP5803602B2 (ja) | 振動子検査方法、および振動子検査装置 | |
| JP5700090B2 (ja) | 角速度検出装置の製造方法 | |
| JP6451367B2 (ja) | 水晶振動子 | |
| US20230304796A1 (en) | Physical Quantity Detection Circuit And Physical Quantity Detection Device | |
| JP2006126095A (ja) | センサの異状検出装置及びセンサの異状検出方法並びに加速度測定装置と加速度測定方法 | |
| JP2010286369A (ja) | 物理量検出装置、物理量検出装置の異常診断システム及び物理量検出装置の異常診断方法 | |
| JP5696293B2 (ja) | 慣性センサ | |
| JP2005003588A (ja) | 角速度センサ用振動子の特性検査方法 | |
| JP2000074674A (ja) | 角速度センサの振動子特性検査方法 | |
| JP5765544B2 (ja) | 物理量検出装置、物理量検出装置の異常診断システム及び物理量検出装置の異常診断方法 | |
| TWI490486B (zh) | 用於感測元件之自我測試系統及其方法 | |
| JP2010060358A (ja) | 角速度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180306 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180306 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180904 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190219 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20190422 |