JP2014528036A - 高密度保管設備 - Google Patents
高密度保管設備 Download PDFInfo
- Publication number
- JP2014528036A JP2014528036A JP2014531889A JP2014531889A JP2014528036A JP 2014528036 A JP2014528036 A JP 2014528036A JP 2014531889 A JP2014531889 A JP 2014531889A JP 2014531889 A JP2014531889 A JP 2014531889A JP 2014528036 A JP2014528036 A JP 2014528036A
- Authority
- JP
- Japan
- Prior art keywords
- transport
- width
- rack
- racks
- floor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/10—Storage devices mechanical with relatively movable racks to facilitate insertion or removal of articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0478—Storage devices mechanical for matrix-arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63C—LAUNCHING, HAULING-OUT, OR DRY-DOCKING OF VESSELS; LIFE-SAVING IN WATER; EQUIPMENT FOR DWELLING OR WORKING UNDER WATER; MEANS FOR SALVAGING OR SEARCHING FOR UNDERWATER OBJECTS
- B63C15/00—Storing of vessels on land otherwise than by dry-docking
Abstract
高密度保管設備は、複数の列の独立して可動な搬送ラックを含み、各列は、複数の独立して可動な搬送ラックを有する。各搬送ラックは、高さ、長さおよび幅を有し、複数の階層を画定し、各階層は少なくとも1つの保管スロットを画定し、スロットは、実質的に搬送ラックの長さを延在し、対象を前記搬送ラックの前記幅端部の中に挿入し前記搬送ラックの前記幅端部から取り除くために、実質的に開いており、アクセス可能である。搬送ラックは、床領域内に配置され、床領域の幅に一致した方向に床に沿って独立して可動である。【選択図】図3
Description
関連出願
本出願は、2009年5月12日に出願された米国特許出願第12/464,745号、ならびに2011年8月2日に出願された米国特許仮出第61/514,057号および2008年5月12日に出願された米国特許仮出願第61/127346号の一部継続出願である、2011年9月23日に出願された米国特許出願第13/241,326号の優先権を主張し、その全体が参照によって本明細書に組み込まれる。
本出願は、2009年5月12日に出願された米国特許出願第12/464,745号、ならびに2011年8月2日に出願された米国特許仮出第61/514,057号および2008年5月12日に出願された米国特許仮出願第61/127346号の一部継続出願である、2011年9月23日に出願された米国特許出願第13/241,326号の優先権を主張し、その全体が参照によって本明細書に組み込まれる。
本出願は、高密度保管設備に関し、より詳細には、複合輸送コンテナ、船舶および他の大型品を保管するための高密度保管設備に関する。
建築材料、材料処理車両、および技法の進歩にもかかわらず、複合輸送コンテナ、船舶、車、家具などの大型の対象のための保管設備が依然として必要とされている。このような設備は、保管した対象を即座に入手し、効率的にアクセスし、ならびに保管スペースの最適利用のための機構を提供するべきである。
例えば、従来の船舶保管設備は、壁に沿って整列したラックを備える大型の建物および未占有の大きい床面積を含む。これは、隅C1、C2、C3およびC4を備える建物Bに対して、図1に示されたような大量の未使用空間をもたらす。2つのアクセス通路A1およびA2は、建物Bの一端部に画定されて、フォークリフト・トラックが船舶などの大型品を3つの固定された静止保管ラックR1、R2およびRsに出し入れができる。
建物の隅C1〜C4、設備Fの長さLに沿って延在する静止ラックS1を有する設備Fに対する、本発明者による米国特許第5,140,787号に基づいて、より有効なシステムが図2に示されている。複数のアクセスドアA1、A2、A3およびA4は、長さLに沿って提供されている。4つの可動の細長い長方形のラックR1、R2、R3およびR4のうちの1つまたは複数を長さLに沿って回転させることができて、選択されたラックの列をアクセスドアA1〜A4の1つを通って入るフォークリフト・トラックに露出する。しかし、フォークリフト・トラックを回転させ、かつ操作する空間を提供するために、依然として何フィートもの面積を空けておかなければならず、複数のアクセスドアを細長い建物のサイズに沿って提供しなければならない。
複合輸送コンテナを保管および回収するためのコンテナ埠頭は、同様の問題を示す。従来の設備は、広い面積の港湾地を消費する。従来の設備は、多くの通路を使用し、複合輸送コンテナ間に広い空間を提供することがあるので、またこのようなコンテナは、概して無原則に配置され広く離間されるので、多くの埠頭の操作者は、コンテナの保管、回収および送達の制御に苦労する。その結果、置換したコンテナの再配置操作および探索操作に時間および費用が掛かることが多い。
したがって、物品が保管され得る設備内の空間に、即座に有効なアクセスを提供する高密度保管設備の存在が必要とされている。
本発明の目的は、所与の面積の保管容量を増加させる、高いモジュラーで適合可能な保管システムを提供することである。
本発明は、複数の列の独立して可動な搬送ラックを含む高密度保管設備を特徴とし、それぞれの列は、複数の独立して可動な搬送ラックを有する。各搬送ラックは、ある高さ、長さおよび幅を有し、複数の階層を画定し、各階層は少なくとも1つの保管スロットを画定し、スロットは、実質的に搬送ラックの長さに延在し、対象を搬送ラックの幅端部の中に挿入する、また搬送ラックの幅端部から取り除くために、実質的に開いておりアクセス可能である。搬送ラックは床領域内に配置され、床に沿って床領域の幅に一致した方向に独立して可動である。好ましくは、搬送ラックは、搬送ラックの縦方向の側面が床領域の縦方向の側面に実質的に平行に配置されて、床領域内の列に配置される。
一部の実施形態では、搬送部は、少なくとも1つの独立して制御可能なモータが、床領域の幅の少なくとも一部に渡って各搬送ラックを駆動可能に動かすような、ラックを動かすための機構を含む。搬送ラックはさらに、ドアからラックの幅端部にアクセスを提供するために、閉囲された保管領域の幅に沿って連結され、かつ分離されてもよい。搬送ラックは、搬送ラックの長さ方向の側面に沿って接合され、かつ分離されてもよく、保管領域に沿った幅方向に可動である列を形成する。搬送ラックを回転させるための軌道は、保管領域の幅に沿って延在してもよい。一実施形態によれば、搬送部は、保管領域の一部に渡ってラックを移動させるためのモータ機構を含む。一部の用途に対して、保管領域の幅に沿って嵌合するように、同数の列の搬送ラックを含むことが有益であることがある。
搬送ラックの数は、保管領域の幅に沿った列内での搬送ラックの選択的移動時に、任意のドアから搬送ラックの幅端部にアクセスを提供するのに充分なサイズ(例えば、未占有の床領域の一部を残しておくなど)を選択してもよい。一実施形態によれば、少なくとも1つのドアは、保管領域の幅に沿って搬送ラックの列内で1つまたは複数の搬送ラックの選択的移動時に、未占有の床領域にアクセスを提供するように、建物の壁に沿って選択的に配置される。未占有の床領域は、スロットに挿入するために未占有の床領域内に対象の操作を収納するようなサイズに選択されてもよい。未占有の床領域はさらに、床領域の幅に沿って搬送ラックの列内で1つまたは複数の搬送ラックの移動時に、ドアにアクセスできるようなサイズに選択されてもよい。一列のラックは、一連の離間された水平支持部によって相互接合された、一連の離間した垂直支持部を含んでもよい。水平支持部は、垂直支持部の高さに沿って適位置に調節可能であってもよい。
設備は、少なくとも1つの壁に沿って配置された一列の静止ラックを含み、静止ラックは一定の長さ、幅および高さを有し、保管スロットに完全に分割されてもよい。スロットはラックの長さに延在しもよく、対象を挿入および取り除くために、開いており幅端部からアクセス可能であってもよい。ラックの幅端部は保管領域に面していてもよい。
添付図面は以下の通りである。
本発明は、複数の列の独立して可動な搬送ラックを含む高密度保管設備によって達成し得、それぞれの列は複数の独立して可動な搬送ラックを有する。各搬送ラックは、ある高さ、長さおよび幅を有し、複数の階層を画定し、各階層は少なくとも1つの保管スロットを画定し、スロットは、実質的に搬送ラックの長さに延在し、対象を搬送ラックの幅端部の中に挿入する、また搬送ラックの幅端部から取り除くために、実質的に開いておりアクセス可能である。搬送ラックは床領域内に配置され、決定された列内の選択された保管スロットにアクセスを提供するために、床に沿って床領域の幅に一致した方向に所望通りに独立して選択的に可動である。好ましくは、搬送ラックは、搬送ラックの長さ方向の側面が床領域の長さ方向の側面に実質的に平行に配置されて、床領域内の列に配置される。以下の記載は、本発明の例示的実施形態を説明するものであり、本明細書に具体的に記載されていない他の実施形態が本発明に網羅されることが理解されよう。
図3〜8は、例示的保管設備10全体の間取図を示す。一実施形態では、30、40、50、60の点を結んだ線によって画定された床領域110が提供されている。床領域は、例えば、長方形または正方形の多角形の形状であってもよい。床領域は、図3に「W」で表した幅、および図3に「L」で表した長さを含む。図3において幅Wに関連した両矢印によって示された方向は、本明細書では「幅方向」と呼ばれ、図3において長さLに関連した両矢印によって示された方向は、本明細書では「長さ方向」と呼ばれる。
図3および4に示されたように、例示的実施形態は、275フィートx425フィートの床領域を有し、これにより多くの適切に配置された搬送ラックにアクセス可能になる。床領域は、適用に依存して、示された床領域より大きくても小さくてもよいことが当業者には理解されよう。必要に応じて、より多いまたはより少ない搬送ラックを利用してもよい。搬送ラックおよび固定ラックはそれぞれ、少なくとも図3に固定ラック205の長さ「Y」246および幅「X」245で示された、長さおよび幅を有する。長さおよび幅は固定ラック205に関して記載したが、以下に論じるような各搬送ラックは、長さ「Y」246および幅「X」245を有する。各固定ラックは、固定ラック205に関して画定された、同軸に沿った長さおよび幅を有する。同様に、各搬送ラックは、同じ列および隣接した列における他の搬送ラックに関して画定された、同軸に沿った長さおよび幅を有する。固定ラックおよび搬送ラックの長さ方向は、床領域の長さ方向に対応してもよく、ラックの幅方向は、床領域の幅方向に対応してもよい。
搬送ラックは可動ラックであり、可動ラックは搬送部の枠に組み込まれた移動のための手段を含んでもよく、または可動搬送構造上に装着されてもよい。複数の可動搬送ラック70〜84、85〜99、100〜114、115〜129、130〜144、145〜159、160〜174、175〜189、および190〜204は、床領域110内の列において示されたように配置され、それぞれの列は多くの個々のラックを含む。適用に依存して、必要に応じて多いまたは少ない搬送ラックを選択してもよい。図4に示された例示的実施形態では、各列は15個の搬送ラックを含む。この実施形態では、領域110の選択された幅は、最大に空間を利用するために搬送ラックで満たされている。他の実施形態では、空間利用以外の隅は、ラックの異なる構成または異なる数を必要としてもよい。
例示的実施形態では、搬送ラック70〜84、84〜99、100〜114、115〜129、130〜144、145〜159、160〜174、175〜189、および190〜204の各列は、領域110に沿った幅方向に可動である。列は、図9の車輪11などの回転可能なローラーまたは車輪上に装着されてもよく、ローラーまたは車輪は、次いで図3の領域110の選択された幅に延在する軌道12などのガイド、スロットまたはレール内に装着される。別法として、列は、磁気浮上システム、ラックの列の移動を可能にする空気浮上、または軌道のない車輪システムなどの搬送ラックの移動を促進するあらゆる他のシステムを使用して装着されてもよい。車輪のシステムは、1つまたは複数の階層を含むことができる。例示的実施形態では、図9の車輪11は、搬送ラック302、304のそれぞれの幅方向の両側の底面に装着され、一連の離間した平行な軌道12は、置換方向に一致するために領域110の幅に沿って提供される。連続した偶数の参照番号302および304が図9において利用されているが、連続した奇数および偶数が図3〜8において利用されているのは、本発明の限定ではない。一部の実施形態では、各列における各搬送ラックは、列における他の搬送ラックと無関係に可動である。例えば、一部の実施形態では、搬送ラック70は、搬送ラック71〜84と無関係に動く。一部の実施形態では、2つ以上のラックが連結され、または一体形成されて一斉に動く。例えば、一部の実施形態では、搬送ラック70および71は一斉に動く。
図3〜8に示された実施形態では、各列内のすべての搬送ラックは同じ長さおよび幅を有しているが、搬送ラックの個々の列の長さおよび幅は異なってもよい。その場合。車輪および補助軌道12の幅方向の配置は、個々の搬送ラックのそれぞれの長さと一致するべきである。軌道は、領域110の幅、すなわち、点(30、60)と点(40、50)を結んだ線の間に延在してもよい。別法として、軌道は、特定の適用に依存して異なる距離に延在してもよい。一部の実施形態では、個々の搬送ラックの図10Bの幅245は、列毎に、または1列内で異なってもよい。一部の実施形態では、搬送ラックの長さ246は、列毎に、または1列内で異なってもよい。
各搬送ラックは、図9のスロット14に完全に分割されてもよい。船舶保管などの適用では、スロットの全高さは、設備によって決定されてもよいことが当業者には理解されよう。しかし、搬送ラックのサイズは、適用に依存して異なってもよい。
一実施形態では、搬送部およびラックは、一連の平行な水平支持部19により完全に接合された、一連の垂直方向支持部18を含む単一構造である。従来の機構に、垂直支持部18に沿って水平支持部を上下に調節させることを提供してもよい。例えば、機構は、水平支持部を、例えばインチ単位で調節してもよく、または水平支持部を適用に依存してより大きい単位もしくはより小さい単位で調節してもよい。一実施形態では、連続する水平支持部の間の垂直距離はスロットの高さを画定し、連続する垂直支持部18の間の水平距離はスロットの幅を画定する。
一実施形態によれば、図3〜8の一連のドア240は、設備の1つの幅方向壁に沿って配置される。未占有の変更可能な作業載荷領域20を提供してもよく、そのサイズは要因の数に基づいて選択されてもよい。このような要因は、ドア240が外壁に沿って配置される場合を含んでもよい。
列70〜84、85〜99、100〜114、115〜129、130〜144、145〜159、160〜174、175〜189、および190〜204における搬送ラックが、床領域110に沿って適切に移動する際に、使用者が各列の幅端部245にアクセスできるように、充分な床領域20を未占有のままにしてもよい。図3〜8に示したように、未占有の床領域20は、設備の使用者が搬送ラックの幅端部245にアクセスできるように、ドア240の置換に対して充分に大きくてもよい。これは、使用者がドア240を通って列内におけるラックの幅端部245にアクセスできるように、1つまたは複数の搬送ラックを充分に移動させることによって達成することができる。スロット内に保管されるべき対象は、搬送ラックの幅端部245を介して挿入されてもよい。一部の実施形態では、スロット内に保管されるべき対象は、搬送ラックの長さ方向の開口246を介して挿入されてもよい。
図3〜8に示したように、ドアのない幅方向壁に沿ったラック205〜220の静止列が提供されてもよい。これにより、設備内でより大きい保管が利用可能になることがある。またラック205〜220の幅端部245は、領域10の幅に沿った搬送ラックの列70〜84、85〜99、100〜114、115〜129、130〜144、145〜159、160〜174、175〜189、および190〜204における搬送ラックの適切な移動により、少なくとも1つのドア240を通ってアクセス可能であってもよい。
未占有の床領域20のサイズは、対象を搬送ラック内に保管でき、搬送ラックの幅端部245の中で操作できるために充分に大きいように選択されてもよい。例えば、未占有の床領域20の長さおよび幅は、船舶(複数可)を搬送ラックの幅端部245に挿入し、搬送ラックの幅端部245から取り除くために、フォークリフト自体が搬送ラックの長さに平行に位置合わせできるのに充分な長さおよび充分な幅であるように選択されてもよい。同様に、未占有の床領域20のサイズは、対象を搬送ラック内に保管でき、搬送ラックの長さ方向の開口246の中で操作できるために充分に大きいように選択されてもよい。例えば、未占有の床領域20の長さおよび幅は、複合輸送コンテナを搬送ラックの長さ方向の開口246に挿入し、搬送ラックの長さ方向の開口246から取り除くために、フォークリフト自体が搬送ラックの長さに垂直に位置合わせできるのに充分な長さおよび充分な幅であるように選択されてもよい。
図4は、床領域110の左端における未占有の床面積20を示す。この構成は、例えば、ラック220の幅端部245へのアクセスを促進してもよい。しかし、図5および6を参照すると、使用者は、対象をラックから取り除くために、搬送ラック104の幅端部245にアクセスすることを望んでもよい。本発明の一実施形態によれば、適切な搬送ラックを、図5および6に示したように床領域110に対して幅方向にシフトさせてもよい。図6では、適切な搬送ラックは、未占有の床面積20が搬送ラック104の幅端部245に通路を提供して、例えば、フォークリフトにより搬送ラック104にアクセスできるようにシフトされている。図7では、搬送ラックはさらに、未占有の床面積20を介して通路を搬送ラック136の幅端部245に提供するためにシフトされている。同様に図8では、適切な搬送ラックは、未占有の床面積20を介してドアから搬送ラック167の幅端部にアクセスできるようにシフトされている。
一実施形態では、可動搬送ラック70〜84、85〜99、100〜114、115〜129、130〜144、145〜159、160〜174、175〜189、および190〜204の長さおよび幅は、設備110内に提供された異なる可動の列間で異なってもよい。設備110に、適切なドア240を通って搬送ラックの幅端部245のすべてにアクセスできるために、少なくとも充分なサイズの未占有の床領域20を提供してもよい。これは、例えば、点30、40、50、および60の間の線によって画定された床領域内の搬送ラックの連続した列が、適切な幅方向に移動すると達成され得る。設備10に、ラック205〜220の静止列を提供してもよい。またこれらの静止ラックは様々な幅を有してもよく、または同じ幅であってもよく、ドアのない壁に沿って配置されてもよい。可動搬送ラック70〜84、85〜99、100〜114、115〜129、130〜144、145〜159、160〜174、175〜189、および190〜204は、それらのラックの長さ方向の寸法が、領域110の長さ方向の寸法に実質的に平行であるように位置合わせされてもよい。
一部の実施形態では、搬送ラックの長さ端部にアクセスすることが必要とされる、または望まれることがある。例えば、複合輸送コンテナを、例えばフォークリフトにより長さ端部からシフトしなければならないラック内に保管することがある。したがって、ラックは、ドアから長さ端部にアクセスできるように配向されてもよい。
より詳細には、図9は、本発明による、1対の例示的に連結された搬送ラック302および304の概略正面図を示す。ラックは、垂直支持部18および水平支持部19によりスロット14に分割されている。搬送ラックの列は、選択され画定された床面積(例えば、点30、60および40、50)の幅に渡って延在してもよく、または特定の適用に適切なあらゆる幅に渡って延在してもよい。可動に連結されたラックを、回転可能で旋回可能な車輪11上に装着してもよく、次いで回転可能で旋回可能な車輪11を床面上に提供された補助軌道12内に装着してもよい。一実施形態では、各通路Aは、少なくとも1つの駆動モータMを有して、搬送ラックを移動させるために冗長なシステムを提供する。
ラックを、別法として搬送部上に装着してもよい。例えば、図10Bは、本発明の例示的実施形態により、マグレブシステムと共に使用するのに適した電磁搬送部上に装着された例示的ラックを示す。図10Cは、本発明の例示的実施形態により、マグレブシステムと共に使用するのに適した、車輪付き搬送部上に装着された例示的ラックを示す
搬送ラックを、長さ方向側面、幅方向側面、または両方に沿って結合してもよい。搬送ラックを、電磁結合システム、電動結合システム、またはフックシステムなどの機械的な結合システムなどにより、あらゆる適切な結合方法を使用して結合してもよい。例えば、図10Aは、2つの搬送部の長さ246を組み合わせるなどの、本発明の例示的実施形態と共に使用するのに適した電磁結合システムを示す。
一実施形態では、図3〜8の固定ラック205〜220の列を、それらの幅端部245が領域110の幅方向側面に面し、それに実質的に平行であるように、位置合わせしてもよい。静止ラックは、より小さい対象を積載、除荷および保管し易いために、可動ラックより小さい長さ方向もしくは幅方向であっても、またはその両方であってもよい。別法として、静止ラックは、適用に依存して、可動搬送ラックと同じサイズでも、またはより大きくてもよい。
一実施形態では、モータ手段は、可動搬送ラックを領域110の長さに沿って搬送ラックの列内で駆動させてもよい。モータ手段に対する遠隔制御手段は、使用者に領域110の外側のアクセスを提供してもよい。これらの遠隔制御手段は、アクセスドア240が配置されている壁の外表面上などの外側に存在してもよい。したがって、使用者は、搬送ラックを外側領域20、110から遠隔で駆動可能に動かすことができる。別法として、遠隔制御手段は、適用に応じて内側に配置されてもよい。またモータ手段を局所的に制御してもよい。
図11は、狭幅Wを画定する壁402と404との間に位置した、本発明による保管設備400を示す。この例に対して、幅Wは35フィートであり、長さLは140フィートである。フォークリフト・トラックのためのアクセスは、1つまたは複数のアクセスドアを構築できる端部406に提供される。列408は、4つの長さ20フィート、幅8フィートの保管スロットを第1の階層内に有し、これは1つの構造内に4つの可動搬送ラックによって提供され、別の構造内に4つのスロットを有する単一の静止ラックである。可動フォークトラックの通路410は、図11に示された搬送部位置に対して11フィートの幅を有し、可動搬送ラックを必要に応じて列412、414、416、418および420内で操作して選択された保管スロットにアクセスするために、保管設備400内に必要とされる空間を表す。列412〜420はそれぞれ、壁402と404との間の幅Wに実質的に沿って移動する、3つの独立して可動な搬送ラックから形成される。示された構造において、列412〜420はそれぞれ、8フィートの幅を有する1つの搬送部、7フィートの幅を有する第2の中央の搬送部、および8.5フィートの幅を有する第3の搬送部を有する。列412および414内の搬送ラックは、20フィートの長さを有するが、列416〜420内の搬送ラックは、20フィートの長さを有する。可動搬送ラックは、異なるタイプの船舶などの、異なるサイズおよび長さの15の物品を第1の階層上に収納するために、合計15の保管スロットを第1の階層上に提供する。第2の階層をそれぞれの搬送ラックおよび静止ラックに加えることにより、保管スロットを38の物品に倍増させる。階層当たり1つの保管スロットと仮定すると、5つの階層は、少なくとも95の物品を処理するはずであり、階層当たりの他の保管スロット構成を以下に説明する。
図12の保管設備500は、背景技術に上述したように図2の設備Fと類似しており、また本発明者による米国特許第5,140,787号に基づく。この構成では、設備500は、200フィートの全長Lおよび135フィートの全幅Wを有する。単一の静止ラック502は、15個の静止ラックSS1〜SS15を第1の階層内に画定する長さLに沿って延在する。設備500は、6つの可動の長方形のラック504、506、508、510、512および514をさらに含み、それぞれは、多くの可動スロットMS1〜MS8、MS9〜MS20、MS21〜MS30、MS31〜MS42、MS43〜MS52、およびMS53〜MS62のそれぞれを画定し、スロットの幅端部は設備500の幅端部に面し、矢印520および521によって示された可動方向に面する。換言すると、船舶の長方形のラックの列のそれぞれは、ラックの列内の船舶の位置に対して「前部から後部まで」すなわち「船首から船尾まで」移動される。設備Fは77隻までの船舶を処理でき、階層レベル1上で長さは12フィートから39フィートまでの範囲である。同様の保管スロットを備える4つのレベルの階層を有することにより、この構成の設備500に対して最高容量308隻の船舶または同様の物品を提供するはずである。
設備500は、寸法が95フィート(矢印524)x60フィート(矢印526)、合計5,700平方フィートの空間を有する、開いたフォークトラックの通路空間522を必要として、6つの長方形のラックの列504〜514の長さ方向および幅方向(矢印520および521)内の移動を収める。アクセスドアは、長さ側面528に沿って提供されなければならない。
比較すると、本発明による独立して可動な搬送ラックを組み込み、その幅端部が側面528に面するように90度回転させる場合は、追加に20隻の船舶を、95フィートの矢印524と60フィートの矢印526で囲まれた領域に対して、図13に示されたように階層毎に追加することができる。4つのレベルの階層を組み込むことにより、追加に80隻の船舶の容量を増加するはずである一方で、依然として必要に応じて、図12のラック502内の静止保管スロットにアクセスできる。可動搬送ラックの列540、542、544、および546はそれぞれ、可動搬送ラックMC1〜MC5、MC6〜MC10、MC11〜MC15、およびMC16〜MC20のそれぞれを有する。この構造において、搬送ラックMC1〜MC10はそれぞれ20フィートの長さを有し、搬送ラックMC11〜MC15はそれぞれ22フィートの長さを有し、搬送ラックMC16〜MC20はそれぞれ24フィートの長さを有する。各列内の搬送ラックの幅は、8.5フィート、8フィート、8.5フィート、8フィート、および8.5フィートであり、フォークトラックの通路548がわずか18フィートの幅を有する。本発明による可動搬送ラック上の船舶は、本明細書に教示されたように、改造後に設備500全体を「船幅毎に」すなわち側面毎に選択的に移動するはずである。別法として、設備が、図13に示された寸法によって囲まれた独立した未占有空間を有する場合は、2つの追加の保管スロットを列540に階層ごとに追加することができる。
図14および15の本発明による保管設備600は、静止ラック602ならびに可動搬送ラックの7列604、606、608、610,612、614および616を有し、それらの幅端部は狭端部620に面する。1つの構造において、設備600は全幅135フィート(矢印622)および全長200フィート(矢印624)、合計27,000平方フィートを有する。列604〜616の可動搬送ラックには、矢印626によって示された長さ170フィート〜173フィート、合計約3,060〜3,114平方フィートの空間に対して、幅18フィートの空いているフォークトラックの通路18が必要である。列612において搬送ラック内の場所Xの物品を回収するためには、図15に示したように列614および616における搬送ラックを右に空間628に移動させる。次に図14の空間628は、図15の2つの領域630および632に分割され、それぞれは18フィートの幅を有する。
設備600の第1の階層レベルは、通常、長さ20フィート〜39フィートの範囲の102隻の船舶を処理でき、4つの階層レベルは、このような船舶を最高408隻まで収納するはずである。幅135フィート、長さ200フィートを有する従来の保管設備を改造して、本発明による可動搬送ラックを備えた開口端部620を備えることにより、全体の保管容量を劇的に増加できる。可動搬送ラックは、米国特許第5,140,787号に開示された長方形のラックの列より著しく小さく、ラックの列全体が移動されないので、装置全体より構築および作動に費用がかからない。
本発明による可動搬送ラックは、階層当たり1つまたは2つのスロットを有することが多いが、これは本発明を限定するものではない。図16Aおよび16Bの可動搬送ラック702および704はそれぞれ、6つの階層T1〜T6を有し、スロットS1およびS2については高さを8フィートに低減し、スロットS3およびS4については7フィートに低減し、スロットS5〜S10については6フィートに低減し、またスロットS11以降については無蓋である。搬送ラック702は、全幅15フィートを有し、奇数のスロットは幅7フィートを有し、偶数のスロットは、非対称の保管のために幅8フィートを有する。搬送ラック704のスロットS1〜S10はそれぞれ、対称の幅8フィートを有するが、スロットS11〜S13は、約5フィートの幅、すなわち、水上オートバイ、カヤック、または他のより狭い船を処理するような幅を有する。
図16Cおよび16Dの可動搬送ラック706および708は、5つの階層T1〜T5を有し、それぞれは全幅18フィートを有する。ラック706のスロットS1〜S8はそれぞれ、幅9フィートを有するが、スロットS9〜S11はそれぞれ、幅6フィートを有する。ラック706および708の両方のラックに対するスロットS1およびS2の高さは10フィートであり、スロットS3〜S6の高さは8フィートである。ラック708の階層T4は、高さ7フィートを有し、それぞれが幅約4.5フィートの4つのスロットS7〜S10を有する。ラック706の無蓋の階層T5は、3つのスロットS9〜S11を有するが、ラック708の階層T5は、1つまたは複数のパレットPを担い、パレットPに水上オートバイなどの多数のより小さい物品を固定する。
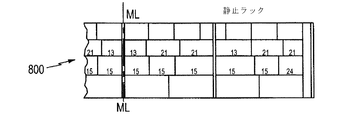
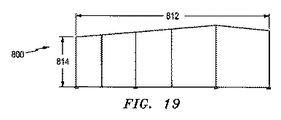
本発明による高密度保管設備800は、図17A−1および17A−2に平面図が示されており、図19に端面立面図が示されている。保管スロットは、設備800の背面長さに沿った静止ラックの列802に対して、図18A−1および18A−2に側面立面図が示されている。マッチ線ML−MLは、図面A−1およびA−2の関係を示す。設備800は、全長350フィート(矢印810)および全幅150フィート(矢印812)を有する。ルーフピーク(図19)は、高さ50フィートを有し、正面高さは41フィート(矢印814)、背面高さは46フィートである。アクセスドアは、設備800の正面に対して長さ820に沿って離間されている。静止保管スロット構造は、すべてが長さまたは深さ40フィートを有し、合計120個の静止保管スロットに対して以下の幅および高さを示すために、図18A−1に文字を提示されている。

可動搬送ラックAが図20A−1および20A−2に端面図で示されており、合計171個の可動Aスロットは、34フィートの長さ、また以下の幅および高さを有する。
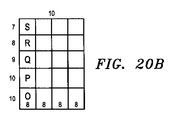
可動搬送ラックBが図20Bに端面図で示されており、合計200個の可動Bスロットは、26フィートの長さ、また以下の幅および高さを有する。
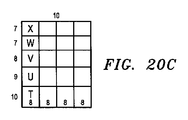
可動搬送ラックCが図20Cに端面図で示されており、合計200個の可動Cスロットは、24フィートの長さ、また以下の幅および高さを有する。
可動搬送ラックDが図20D−1および20D−2に端面図で示されており、合計260個の可動Dスロットは、20フィートの長さ、また以下の幅および高さを有する。
したがって、52,500平方フィートの設置面積では、約961隻の標準サイズの船舶を設備800内に保管でき、必要に応じて容易にアクセスできる。
図21は、例示的実施形態による複合輸送コンテナ1112と共に使用するのに適した車輪付き搬送部1110上に装着された、例示的搬送ラック1100を示す。搬送ラック1100は、4つのスロット1114〜1118を含む。各スロットには、長さ方向開口246からアクセスできる。この実施形態では、搬送ラック1100〜1104は、床領域110の長さ「L」に対して長さ方向に移動する。この実施形態では、軌道12は、床領域110の長さ「L」に平行な長さ方向に延在する。搬送ラック1100のスロットの1つの中に複合輸送コンテナを設置するのは、長さ方向開口246から行われる。同様に、搬送ラック1100のスロットの1つから複合輸送コンテナを取り除くのは、長さ方向開口246から行われる。
図22は、例示的実施形態による複合輸送コンテナ1112と共に使用するのに適した車輪付き搬送部1110上に装着された、複数の搬送ラック1100の例示的俯瞰図を示す。例示的に示された搬送ラック1100は、領域20を画定する長さ方向「L」に移動し、領域20は、次いで搬送ラック1100の選択された1つへのアクセスおよび退出を提供する。搬送ラック1100は、個々に動いてもよい。一部の実施形態では、2つ以上の搬送ラック1100を一斉に動かすために連結されているが、搬送ラック1100を個別に動かすように分離することができる。
他の実施形態に関して上に論じたように、図11および12に示された搬送ラックは、幅方向寸法245に沿って電磁的に連結および分離されてもよく、または機械的に幅方向寸法245に沿って連結および分離されてもよい。
1列の搬送ラック内の個々の搬送ラックは、個別に駆動可能であってもよく、遠隔モータ制御に、それぞれの列内の搬送ラックが別の列内の搬送ラックと関係なく個別に駆動する手段を提供してもよい。使用者が、任意の特定の可動の列または静止ラックにアクセスしたいときに、使用者は個々の搬送ラックおよび列を領域110内の適切な位置に移動させるためにそれらを個別に駆動することができ、それによって所望のラックへのアクセスを得ることができる。一実施形態では、使用者はこれらのアクセスを遠隔制御によって得ることができる。
本発明による設備を船舶保管に使用する実施形態では、領域20は、積載/除荷、船舶または他の対象の点検、清掃、および修理などの多くの目的を果たしてもよい。一部の実施形態では、保管設備は、完全にまたは一部が閉囲されてもよい。設備は、屋根を含んでも含まなくてもよい。
本発明の特定の特徴を図面に示したものもあれば、示していないものもあるが、これは便宜上に過ぎず、それぞれの特徴は、本発明による任意のまたはすべてのその他の特徴と組み合わされてもよい。本発明の基本的な新規の特徴をその1つまたは複数の好ましい実施形態に適用するように示し、説明し、指摘したが、示された装置およびそれらの作動の形および詳細に様々な省略、置換、および変更が、本発明の精神および範囲から逸脱することなく当業者によってなされてもよいことが理解されよう。また、1つの説明された実施形態から別の実施形態への要素の置換も、充分に意図され予期される。図面は、必ずしも一定の縮尺で描かれていないが、実際には概念に過ぎないことも理解されたい。
Claims (13)
- ある長さおよび幅を有する床領域と、
可動搬送ラックの複数の列であって、それぞれの列は複数の前記搬送ラックを有し、それぞれの搬送ラックは、ある高さ、長さおよび幅を有し、複数の階層を画定し、各階層は少なくとも1つの保管スロットを画定し、前記スロットは、実質的に前記搬送ラックの前記長さに延在し、対象を前記搬送ラックの前記幅端部の中に挿入し前記搬送ラックの前記幅端部から取り除くために、実質的に開いてアクセス可能であり、前記搬送ラックは、前記床領域内に配置され、前記床領域の前記幅に一致した方向に前記床に沿って独立して可動であり、前記搬送ラックの前記長さ方向側面を備えた前記床領域内の前記列内に配置された前記搬送ラックは、前記床領域の前記長さ方向側面に実質的に平行に配置される、可動搬送ラックの複数の列とを備える、高密度保管設備。 - 前記床領域の幅方向側面に実質的に平行に配置された壁をさらに備え、前記壁は、前記搬送ラックのすべての前記幅端部にアクセスを提供するために、前記壁の前記長さに沿って選択的に配置された少なくとも1つのドアを含み、前記搬送ラックは、前記ドア手段から前記ラックの前記幅端部にアクセスを提供するために、前記閉囲された床領域の前記幅に沿って可動である、請求項1に記載の設備。
- 前記搬送ラックは、前記搬送ラックの前記幅端部にアクセスを提供するために、前記床の前記幅に沿って解除可能に連結される、請求項1または2に記載の設備。
- 搬送ラックの少なくとも2つの列は、前記床領域内に配置され、前記床領域内の前記長さに沿って嵌合するように、同数の列の搬送ラックが前記床領域内に配置され、前記床の前記幅に沿った搬送ラックの前記列内の前記搬送ラックの選択的移動時に、前記搬送ラックの前記幅端部にアクセスを提供するために、少なくとも充分なサイズである未占有の前記床領域の一部を残す、請求項1〜3のいずれか1項に記載の設備。
- 前記未占有の床領域は、前記スロットに挿入するために、前記未占有の床領域内に前記対象の操作を収納するようなサイズであるようにさらに選択される、請求項4に記載の設備。
- 前記未占有の床領域は、前記床領域の前記幅に沿って搬送ラックの前記列内で1つまたは複数の前記搬送ラックの移動時に、アクセスできるようなサイズであるようにさらに選択される、請求項4または5に記載の設備。
- 少なくとも1つのドアは、前記床領域の前記幅に沿って搬送ラックの前記列内で1つまたは複数の前記搬送ラックの選択的移動時に、前記未占有の床領域にアクセスを提供するように、前記設備の幅方向の壁に沿って選択的に配置される、請求項1〜6のいずれか1項に記載の設備。
- 前記搬送ラックを前記床領域の前記幅の少なくとも一部に渡って駆動可能に移動させるために、少なくとも1つの独立した制御可能なモータをさらに備える、請求項1〜7のいずれか1項に記載の設備。
- 1列を備える前記搬送ラックは、前記床領域に沿って幅方向に可動であり、選択的に離断または分離される、列を形成する前記搬送ラックの長さ方向側面に沿って電磁的に接合される、請求項1〜8のいずれか1項に記載の設備。
- 前記床領域の前記幅方向側面に沿って配置された1列の静止ラックをさらに備え、前記静止ラックは、一定の長さ、幅および高さを有し、保管スロットに完全に分割され、前記スロットは、前記ラックの前記長さに延在し、対象を前記静止ラックの1つの幅端部の中に挿入し、前記静止ラックの前記幅端部から取り除くために、開いており前記1つの幅端部からアクセス可能であり、前記ラックの前記幅端部は前記床領域に面している、請求項1〜9のいずれか1項に記載の設備。
- 前記搬送ラックは、前記床領域内で幅方向に移動するために軌道上に装着され、前記軌道は、前記床領域の前記幅方向側面に実質的に平行な方向に前記床領域の前記幅に延在する、請求項1〜10のいずれか1項に記載の設備。
- 前記床領域は閉囲されている、請求項1〜11のいずれか1項に記載の設備。
- 前記搬送ラックの少なくとも一部は、一連の離間した水平支持部によって相互接合された一連の離間した垂直支持部を含む、請求項1〜12のいずれか1項に記載の設備。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/241,326 US9511830B2 (en) | 2008-05-12 | 2011-09-23 | High density storage facility |
| US13/241,326 | 2011-09-23 | ||
| PCT/US2012/055669 WO2013043515A1 (en) | 2011-09-23 | 2012-09-15 | High density storage facility |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014528036A true JP2014528036A (ja) | 2014-10-23 |
| JP2014528036A5 JP2014528036A5 (ja) | 2015-02-26 |
Family
ID=47914778
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014531889A Pending JP2014528036A (ja) | 2011-09-23 | 2012-09-15 | 高密度保管設備 |
Country Status (10)
| Country | Link |
|---|---|
| EP (1) | EP2758324A4 (ja) |
| JP (1) | JP2014528036A (ja) |
| KR (1) | KR20140077893A (ja) |
| CN (1) | CN103857605A (ja) |
| BR (1) | BR112014006814A2 (ja) |
| CA (1) | CA2849247A1 (ja) |
| IL (1) | IL231623A0 (ja) |
| MX (1) | MX2014003472A (ja) |
| SG (1) | SG11201400782SA (ja) |
| WO (1) | WO2013043515A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014202014A (ja) * | 2013-04-08 | 2014-10-27 | 日本発條株式会社 | 立体駐車装置用格納庫及び前記立体駐車装置用格納庫を有する立体駐車装置 |
| JP2021071022A (ja) * | 2019-11-01 | 2021-05-06 | 本田技研工業株式会社 | 車両搬送制御装置、車両搬送制御方法および車両搬送システム |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9511830B2 (en) | 2008-05-12 | 2016-12-06 | Mary A. Corcoran | High density storage facility |
| US8793012B2 (en) | 2012-12-07 | 2014-07-29 | John F Corcoran | Container scanning system and method |
| CN111833918B (zh) * | 2019-04-23 | 2021-05-28 | 苏州互盟信息存储技术有限公司 | 一种标准机架式光盘库 |
| CN111833914B (zh) * | 2019-04-23 | 2021-07-02 | 苏州互盟信息存储技术有限公司 | 一种用于光盘库中的光盘驱动器 |
| CN111532647B (zh) * | 2020-05-29 | 2021-05-18 | 长江师范学院 | 一种自动出药系统 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB327836A (en) * | 1929-03-08 | 1930-04-17 | William Ivor Bell | An improved system of storing motor road vehicles and means for carrying same into practice |
| GB576627A (en) * | 1943-06-26 | 1946-04-12 | Thomas Edward Foulkes | Improvements relating to storage systems and apparatus |
| CH495484A (de) * | 1969-10-24 | 1970-08-31 | Stienen & Troehler Ingenieurbu | Einrichtung zum Lagern von Gegenständen, insbesondere zum Parkieren von Automobilen |
| JPS50158467A (ja) * | 1974-06-13 | 1975-12-22 | ||
| JPS61263504A (ja) * | 1985-05-15 | 1986-11-21 | Kenji Go | パズル運動を組合せた循環式立体格納庫 |
| US5140787A (en) * | 1989-07-10 | 1992-08-25 | John Corcoran | High density storage facility |
| RU1792892C (ru) * | 1991-01-31 | 1993-02-07 | Специальное Конструкторское Бюро "Транспрогресс" | Склад дл хранени тарных грузов |
| CN2314012Y (zh) * | 1997-02-17 | 1999-04-14 | 翟金南 | 可装、拆、移动的组合式货柜商场结构 |
| RU51602U1 (ru) * | 2005-07-21 | 2006-02-27 | Закрытое Акционерное Общество "Инженерно-Коммерческий Центр "Раритет" (Зао "Раритет") | Система мобильного оборудования |
| US20090308000A1 (en) * | 2008-05-12 | 2009-12-17 | Corcoran John F | High density storage facility |
-
2012
- 2012-09-15 MX MX2014003472A patent/MX2014003472A/es not_active Application Discontinuation
- 2012-09-15 CN CN201280046515.4A patent/CN103857605A/zh active Pending
- 2012-09-15 JP JP2014531889A patent/JP2014528036A/ja active Pending
- 2012-09-15 CA CA2849247A patent/CA2849247A1/en not_active Abandoned
- 2012-09-15 KR KR1020147008237A patent/KR20140077893A/ko not_active Application Discontinuation
- 2012-09-15 EP EP12833585.8A patent/EP2758324A4/en not_active Withdrawn
- 2012-09-15 SG SG11201400782SA patent/SG11201400782SA/en unknown
- 2012-09-15 WO PCT/US2012/055669 patent/WO2013043515A1/en active Application Filing
- 2012-09-15 BR BR112014006814A patent/BR112014006814A2/pt not_active Application Discontinuation
-
2014
- 2014-03-20 IL IL231623A patent/IL231623A0/en unknown
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014202014A (ja) * | 2013-04-08 | 2014-10-27 | 日本発條株式会社 | 立体駐車装置用格納庫及び前記立体駐車装置用格納庫を有する立体駐車装置 |
| JP2021071022A (ja) * | 2019-11-01 | 2021-05-06 | 本田技研工業株式会社 | 車両搬送制御装置、車両搬送制御方法および車両搬送システム |
| JP7185612B2 (ja) | 2019-11-01 | 2022-12-07 | 本田技研工業株式会社 | 車両搬送制御装置、車両搬送制御方法および車両搬送システム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103857605A (zh) | 2014-06-11 |
| SG11201400782SA (en) | 2014-04-28 |
| CA2849247A1 (en) | 2013-03-28 |
| BR112014006814A2 (pt) | 2017-04-04 |
| KR20140077893A (ko) | 2014-06-24 |
| WO2013043515A1 (en) | 2013-03-28 |
| IL231623A0 (en) | 2014-05-28 |
| EP2758324A4 (en) | 2015-06-03 |
| MX2014003472A (es) | 2014-08-26 |
| EP2758324A1 (en) | 2014-07-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014528036A (ja) | 高密度保管設備 | |
| US10981723B2 (en) | Robotic inventory handling | |
| TWI777945B (zh) | 用於在高架倉庫中貯存和獲取或者重排貯存品的運輸和轉移系統 | |
| US20090308000A1 (en) | High density storage facility | |
| WO2019238661A1 (en) | Container accessing station with lifting device | |
| KR102538516B1 (ko) | 물품을 피킹하는 시스템 및 방법 | |
| KR20170024046A (ko) | 로봇형 물품 취급 시스템, 장치 및 방법 | |
| CN105980289A (zh) | 将高架仓中的货柜入仓、出仓或转仓的方法与装置 | |
| CN104444007A (zh) | 一种密集式立体仓库货物的存取方法及装置 | |
| EP3807180B1 (en) | Container accessing station with lifting device | |
| US9511830B2 (en) | High density storage facility | |
| EP4017814A1 (en) | A delivery system, an automated storage and retrieval system and a method of transporting a container | |
| KR20220160056A (ko) | 다수의 로우를 갖는 자동화 보관 타워 | |
| JP2023519895A (ja) | カルーセルを伴う自動化された保管塔 | |
| US20240025642A1 (en) | Transporting Device and Storage System | |
| US20080226437A1 (en) | System, method and apparatus for space-efficient object storage | |
| GB2118157A (en) | Improvements relating to warehouses | |
| CS213318B2 (en) | Storing rack | |
| KR20240015114A (ko) | 보관 및 회수 시스템 | |
| DE102021116485A1 (de) | System und Verfahren zum Kommissionieren von Flatpack-Artikeln | |
| JPH07277428A (ja) | 長尺材の供給保管装置 | |
| JPH092617A (ja) | 倉 庫 | |
| JPS62121114A (ja) | 回転棚に対する入出庫方法及びその装置 | |
| JPH10114404A (ja) | 物品保管装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150108 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150915 |