JP2014169176A - 乗客コンベア - Google Patents
乗客コンベア Download PDFInfo
- Publication number
- JP2014169176A JP2014169176A JP2013043033A JP2013043033A JP2014169176A JP 2014169176 A JP2014169176 A JP 2014169176A JP 2013043033 A JP2013043033 A JP 2013043033A JP 2013043033 A JP2013043033 A JP 2013043033A JP 2014169176 A JP2014169176 A JP 2014169176A
- Authority
- JP
- Japan
- Prior art keywords
- passenger
- conveyor
- passenger conveyor
- detection sensor
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Abstract
【課題】
乗客コンベアを利用しない乗客の誤検出防止を図り、乗客の乗客コンベアへの乗り込み時における安全性向上を図る。
【解決手段】
乗り口エリアと降り口エリアとの間を移動する無端状に連結された複数のステップを備えた移動部と、ステップの両側に設けられた欄干と、この欄干上をステップと同期して移動する手摺と、乗客コンベアの運転を制御する乗客コンベアの制御装置を備えた乗客コンベアにおいて、乗客コンベア乗降口エリアのターミナル部の手摺近傍に乗客検出センサを設けることにより、乗客検出センサの乗客検出位置により乗客コンベアの加速度を変化させて所定の運転速度に加速する乗客コンベアであり、又、乗客検出センサの乗客検出漏れを防止するため、乗降口のスカート部にも乗客検出用センサを設けた。
【選択図】 図3
乗客コンベアを利用しない乗客の誤検出防止を図り、乗客の乗客コンベアへの乗り込み時における安全性向上を図る。
【解決手段】
乗り口エリアと降り口エリアとの間を移動する無端状に連結された複数のステップを備えた移動部と、ステップの両側に設けられた欄干と、この欄干上をステップと同期して移動する手摺と、乗客コンベアの運転を制御する乗客コンベアの制御装置を備えた乗客コンベアにおいて、乗客コンベア乗降口エリアのターミナル部の手摺近傍に乗客検出センサを設けることにより、乗客検出センサの乗客検出位置により乗客コンベアの加速度を変化させて所定の運転速度に加速する乗客コンベアであり、又、乗客検出センサの乗客検出漏れを防止するため、乗降口のスカート部にも乗客検出用センサを設けた。
【選択図】 図3
Description
本発明は、エスカレーターや動く歩道等の乗客コンベアに関し、特に乗客コンベアの乗り口エリアに、乗客を検出するセンサを備えた乗客コンベアに関する。
エスカレーターや動く歩道等の乗客コンベアは、乗降口間を移動する無端状に連結されたステップ(踏み板、又はエスカレーターでは踏み段とも呼ばれる)からなる移動部と、ステップの両側に設けられた欄干と、この欄干上をステップと同期して移動する手摺(ハンドレールとも呼ばれる)とによって構成され、乗り口から降り口までの間の移動部で乗客を搬送する。
従来、乗り込もうとする乗客の有無に応じて自動的に運転を制御する乗客コンベアがあり、乗り口から離れた位置に乗客の通過を検出する乗客検出装置を設け、当該検出装置の検出信号で乗客コンベアの運転を開始し、乗客コンベアに乗り込んだ乗客が降り口から出た後、一定時間の間に他の乗客が乗客検出装置で検出されなければ、乗客コンベアの運転を停止させるか低速待機運転にする自動運転制御方式の乗客コンベアが設置されていることがある。
下記の特許文献1で開示された発明は、自動運転制御方式の乗客コンベアの乗客の乗り込みの際における乗客コンベアの起動時の加速度制御に関するものであり、乗り口から距離Lだけ離れた乗客検出装置で乗客を検出し、乗客が乗り込むまでに乗客コンベアの速度を定格速度に近いレベルまで立ち上げ、乗客が乗り込む頃には定格速度に近いことから加速度を小さくする制御が可能な乗客コンベアに関するものである。これにより、上記特許文献1で開示された発明は、乗り込み時の転倒等を防止することができ、乗客に違和感を生じさせずに安全に運転できる乗客コンベアを得ようとするものである。
また、下記の特許文献2においては、乗客コンベアの手摺表面にタッチセンサを設け、乗客が手摺表面にタッチすることで、手摺表面に設けられた表示装置に広告等の表示をすることを特徴とする発明が開示されている。
上記特許文献1で開示された発明では、乗客検出装置が乗り口から距離Lだけ離れた位置に設置され、乗客検出装置による乗客の検出時から、乗客が乗客コンベアに乗るまでの時間で、乗客コンベアの起動時の加速度を制御している。このため、乗客コンベアの乗り口から離れた乗客検出装置付近に、立ち止まったり、その場所から引き返す様な人、特に付近にいる子供を検出するため、乗客の誤検出が発生し、乗客コンベアの不必要な起動や加速が発生することがある。また、乗客コンベアの転倒事故は、乗客コンベアの乗り口での乗り込み時に、乗客、特に高齢者がステップの移動速度に対応できずにバランスを崩すことによる転倒事故が多く、この点での配慮がさらに必要である。
又、上記特許文献2で開示された発明は、移動手摺の表面のセンサが検出した位置に対して、移動手摺に位置する所定領域に画像を表示する乗車コンベアの表示装置に関するものであり、乗客の誤検出や乗客の転倒事故防止の観点での安全性の配慮に関するものではない。
そこで、本発明の目的は、乗客の誤検出低減と乗り込み時における高齢者等への安全性向上の配慮を目的としている。
本発明を複数の観点から把握することができるが、代表的な本発明の乗客コンベアは、以下の通りである。また、その他の観点から捉えた本発明の乗客コンベアは、以下に述べる発明を実施する形態の説明等でさらに明らかになる。
すなわち、代表的な本発明は、乗り口エリアと降り口エリアとの間を移動する無端状に連結された複数のステップを備えた移動部と、当該移動部の両側に設けられ下部にスカート部を有する欄干と、この欄干上をステップと同期して移動する手摺と、乗客コンベアの運転を制御する乗客コンベアの制御装置とを備えた乗客コンベアにおいて、
前記乗り口エリアの前記手摺の近傍に設けられた第1の乗客検出センサと、前記乗り口エリアのスカート部又は欄干に設けられた第2の乗客検出センサとを備え、
前記乗客コンベアの制御装置は、
前記乗り口エリアの前記手摺の近傍に設けられた前記第1の乗客検出センサが、前記手摺りに接触又は接近した乗客の手を検出した場合、乗客コンベアを加速又は起動して加速し、所定の速度に到達させる加速制御を行うことを特徴とする乗客コンベアである。
前記乗り口エリアの前記手摺の近傍に設けられた第1の乗客検出センサと、前記乗り口エリアのスカート部又は欄干に設けられた第2の乗客検出センサとを備え、
前記乗客コンベアの制御装置は、
前記乗り口エリアの前記手摺の近傍に設けられた前記第1の乗客検出センサが、前記手摺りに接触又は接近した乗客の手を検出した場合、乗客コンベアを加速又は起動して加速し、所定の速度に到達させる加速制御を行うことを特徴とする乗客コンベアである。
以上の様に、本発明の乗客コンベアでは、乗客コンベアの手摺近傍に乗客検出センサを設けることにより、乗客コンベアを利用しない乗客の誤検出の低減をできる効果がある。
又、本発明の乗客コンベアでは、乗客コンベアの手摺近傍に乗客検出センサを設けることにより、手摺部近傍に設けられたセンサの検出位置に応じて、乗客コンベアの起動時の加速度を制御することができ、安全に配慮した乗客コンベアの起動時の加速をすることで、高齢者や子供連れの乗客等へ配慮した乗客コンベアの運転制御をすることが可能である。
以下、図面を用いて、本発明の実施の形態について説明する。以下の説明は本発明の実施の形態を示すものであり、本発明がこれらの実施の形態に限定されるものではなく、本明細書に開示される技術的思想の範囲内において当業者による様々な変更および修正が可能である。また、実施の形態を説明するための全図において、同一の機能を有するものは、同一の符号を付け、その繰り返しの説明は省略することがある。
以下の本発明の実施の形態では、乗客コンベアとして上昇運転をしているエスカレーターの場合を例にとり説明するが、下降運転においても同様であり、又、動く歩道等においても同様である。
又、乗客コンベアの乗り口エリアにおける乗り口水平部の手摺近傍に設けられた乗客検出センサにより、乗客コンベアに乗り込む乗客を検出した際に、乗客コンベアを起動させて加速し所定速度に到達させる、又は低速運転から加速して所定速度に到達させる運転制御を行う制御装置を備えた乗客コンベアを例にして本発明の実施の形態の具体例を説明する。ここで、乗り口エリアとは、乗客コンベアの乗り口床板と乗客コンベアの移動部の端部を含むエリアである。例えば、エスカレーターの場合、乗り口床板とエスカレーターの水平移動部のエリアである。また、例えば、動く歩道の場合は、乗り口床板と動く歩道の水平移動部の端部を含むエリアである。
(実施例1)
本実施例の乗客コンベアは、無端状に連結して形成され、乗降床の間を循環移動するステップと、ステップの進行方向に沿って立設される欄干と、ステップに同期して移動するように欄干に設けられる手摺を備える乗客コンベアにおいて、乗客コンベア乗降口の手摺近傍に複数の乗客検出センサを設ける。そのセンサは乗客コンベア手摺近傍で乗客の手を検出できる構成とした。さらには、乗降口のスカート部に乗り込み確認用のセンサを設けた。
本実施例の乗客コンベアは、無端状に連結して形成され、乗降床の間を循環移動するステップと、ステップの進行方向に沿って立設される欄干と、ステップに同期して移動するように欄干に設けられる手摺を備える乗客コンベアにおいて、乗客コンベア乗降口の手摺近傍に複数の乗客検出センサを設ける。そのセンサは乗客コンベア手摺近傍で乗客の手を検出できる構成とした。さらには、乗降口のスカート部に乗り込み確認用のセンサを設けた。
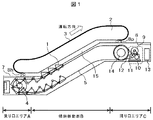
図1は、本実施例1での乗客コンベアであるエスカレーターの構造の一例を示す概略側面図である。図1に示した乗客コンベアであるエスカレーターでは、乗り口床板7とエスカレーターの乗り口の水平移動部とからなる乗り口エリアAと、降り口床板6とエスカレーターの降り口の水平移動部とからなる降り口エリアCと、降り口エリアAと乗り口エリアCとの間の傾斜移動部Bがある。本実施例では、乗り口エリアAの手摺近傍で乗客の検出が行われるものとして、以下に説明する。
図1において、乗客コンベアであるエスカレーターには、無端状に連結された複数のステップ1が設けられるとともに、これらのステップ1の左右両側(ステップ1の幅方向両側)に移動する手摺3を支持する欄干2を立設させる。欄干2は、欄干パネルと、欄干パネルの下部を覆うように設けられたスカート部15を有している。欄干2の内側(ステップ1側)のスカート部15は、ステップ1の側方に垂直に配置されたスカートガードと、欄干パネルの下部とスカートガードとの間に設けられ一部が傾斜した内側デッキとを有している。
また、図1において、ステップ1と手摺3との同期移動により、上昇運転時には乗り口床板7から降り口床板6へ乗客を搬送する。下降運転時は乗り口床板6から降り口床板7へ乗客を搬送する。また、ステップ1を無端状に連結するチェーン5は、スプロケット4、14に巻き掛けられている。さらに、降り口床板6の下部にはモータ9および減速機10を有してなる駆動装置11が設けられ、制御装置13によって制御される。駆動装置11は、駆動チェーン12を介してスプロケット14を駆動し、チェーン5およびステップ1を駆動するようになっている。
なお、乗客コンベアである動く歩道の場合は、傾斜移動部Bでなく、水平移動部となる点が異なるだけで、上記の乗客コンベアに関する説明は同じである。
図2は、乗客コンベア、例えばエスカレーターの乗り口エリアのターミナル部の右側の手摺31の下側に複数のセンサを埋め込んで設けた例を示す側面図であり、図3は、手摺の下側に複数のセンサを設けた図2の例のターミナル部の上面図である。
図2及び図3に示す様に、乗客コンベアであるエスカレーターの乗り口エリアの水平移動部のターミナル部で右側の手摺31の下側に複数の乗客検出センサ8a、8b、8cを設け、左側の手摺32の下側に複数の乗客検出センサ8d、8e、8f(図2では略)を設ける。乗客検出センサはある一定の検出領域を持ったセンサを取り付ける。乗客検出センサは、欄干の内側(ステップ側)または外側に外付けされても、図2の様に欄干内部に埋め込まれていてもよい。
乗客検出センサは、乗客が手摺31、32を手で掴んだり、手摺31、32に手を載せたり手を近付けたりかざしたりして、乗客の手が手摺に接触や接近したときに、乗客検出ができるものにする。すなわち、乗客検出センサとしては、上方内側(ステップ側)に向かって検出領域を有する反射式センサ(光センサや超音波センサ等)、一定の広さの検出領域での検出が可能なエリアセンサ、又は乗客の手の接近によって反応する非接触センサ等であることが望ましい。図2においては、反射式センサ8a、8b、8cを乗客検出センサとして用い、それぞれの検出領域を20、21、22で模式的に示したものである。なお、反射式センサ等の検出領域が狭いセンサを用いる場合においては、複数の乗客検出センサを所定の間隔で設置する。
又、エリアセンサと呼ばれる一定の広い検出領域を持った乗客検出センサを用いる場合は、左右の欄干に1個ずつ配置することでも足りる場合もあり、1個ずつ配置としても良い。
図4は、手摺31の下部にエリアセンサ41を、斜め上方の内側(ステップ側)に向かって検出領域を作る様に設けた例を示す側面図である。左側手摺32の下部にも同様に、内側(ステップ側)に向かって検出領域を作る様に、エリアセンサを取り付ける。走査型のエリアセンサをセンサ41を用いると、一定の広い検出領域42で、乗客が手摺を手で掴んだり、手摺に手を載せたり近づけたりかざしたりしたとき、乗客が手摺のどの位置で手摺に接触又は接近したかを検知することができる。
図4は、手摺31の下部にエリアセンサ41を、斜め上方の内側(ステップ側)に向かって検出領域を作る様に設けた例を示す側面図である。左側手摺32の下部にも同様に、内側(ステップ側)に向かって検出領域を作る様に、エリアセンサを取り付ける。走査型のエリアセンサをセンサ41を用いると、一定の広い検出領域42で、乗客が手摺を手で掴んだり、手摺に手を載せたり近づけたりかざしたりしたとき、乗客が手摺のどの位置で手摺に接触又は接近したかを検知することができる。
又、手摺を掴まない乗客もいる可能性もあることから、スカート部15又は欄干2に光電センサの受光器8gと投光器8hとからなる光透過型の光電センサを設け、通過する乗客を検出する。図2と図4では、スカート部15に光電センサを設けている。
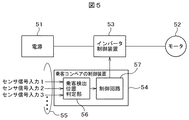
図5は、本発明の乗客コンベアの制御装置とインバータ制御装置のブロック構成図である。図5において、51は電源装置、52は乗客コンベアの駆動装置のモータ、53はモータ52を制御するインバータ制御装置、54は乗客コンベアの制御装置、55は乗客検出センサ8a〜8fからのセンサ信号の入力、56は乗客検出センサ信号が入力される乗客検出位置判定部、57はインバータ制御装置等を制御する制御回路である。
水平移動部の手摺近傍に設けられた複数の乗客検出センサのそれぞれの出力信号55は、制御装置54の乗客検出位置判定部56に入力され、乗客の検出位置が判定される。その乗客検出位置の判定結果は制御回路57に入力され、乗客検出センサの乗客検出位置から乗客コンベアのステップまでの距離が推定される。制御回路57は、乗客検出センサの検出位置から乗客コンベアのステップまでの距離に合わせた加速度により、乗客コンベアを起動して加速又は低速待機運転から加速を行う様に、インバータ制御装置53に指令を出し、インバータ制御装置53は、モータ52を駆動して乗客コンベアの移動速度を制御する。
図6は、本実施例1での乗客コンベアの制御装置の制御の流れを説明するフロー図である。
ステップ61では、乗客の乗り込みが一定時間ないため、乗客コンベアは自動運転待機中で停止しているか、又は低速待機運転中の状態である。
ステップ61では、乗客の乗り込みが一定時間ないため、乗客コンベアは自動運転待機中で停止しているか、又は低速待機運転中の状態である。
ステップ62では、乗客が乗客コンベアの乗り口に来て、手摺近傍の乗客検出センサ8a〜8fの検出領域に手を出し、乗客検出センサが感知して乗客検出が行われたかが判断される。乗客検出センサ8a〜8fが感知して乗客検出が行われた場合(YESのライン)、乗客コンベアの制御装置54の乗客検出位置判定部56に乗客検出センサ8a〜8fからのセンサ信号が入力されて、制御回路57は乗客コンベアを定格速度運転まで加速するためにインバータ制御装置53に指令を出す。
この時、乗り口の乗客が手摺近傍の乗客センサ8a〜8fのセンサ検出領域に手を出さずに乗客コンベアに乗ろうとした場合は(NOのライン)、ステップ63で、乗客の通過が乗り口エリアのスカート部に設けられた光電センサ(受光器8gと投光器8h)によって検出されたかが判断される。なお、乗客通過がなければ(NOのライン)、ステップ61に戻る。乗客の通過がスカート部に設けられた光電センサ(受光器8gと投光器8h)によって検出された場合(YESのライン)、乗客コンベアの制御装置54の乗客検出位置判定部56には光電センサ(受光器8g)からのセンサ信号が入力されて、制御回路57は乗客コンベアを定格速度運転まで加速するためにインバータ制御装置53に指令を出す。
ステップ64で、乗客コンベアの制御回路57によるインバータ制御装置53の制御により、モータ52が駆動されて乗客コンベアを定格速度運転にするために乗客コンベアの加速が行われ、ステップ65で、乗客コンベアは定格速度運転を行う。
ステップ66で、乗客コンベアの制御回路57で、光電センサ(受光器8gと投光器8h)が乗客を検出しない時間が、一定時間経過したかが判断される。この時の一定時間とは、光電センサが最後に乗客を検出した後、乗客が乗客コンベアの移動で降り口に到着するまでの時間であり、乗客コンベアの長さと速度によって決まる時間であるが、降り口エリアCの降り口床板6を乗客が標準的に通過する時間を加えた時間とすると余裕が取れる。なお、図1に示す様に、降り口エリアのスカート部に設けられた光電センサ(投光器8pと受光器8q(図示せず))を設けて、光電センサ(投光器8pと受光器8q(図示せず))で乗客の通過を検出し、余裕時間を加えた一定時間の経過後にステップ67に進んでも良い。
ステップ67で、乗客コンベアの制御回路57はインバータ制御装置53を制御して、乗客コンベアを自動運転待機で停止させるか、又は低速待機運転を行わせる。
図7は、乗客検出センサ8a〜8fが乗客を検出し、乗客コンベアの制御装置54の制御によりインバータ装置53がモータを52を駆動し、乗客コンベアを加速して定格速度に到達する際の乗客コンベアの加速制御のタイムチャートである。図7において、横軸は時間、縦軸は乗客コンベアの速度を示す。図7のタイムチャートにおいて、乗客の検出時Dで、図3の乗客検出センサ8a〜8fのいずれかで乗客が手摺を掴んだことを検出したとする。乗客検出センサ8a〜8fのうちの乗客を検出した乗客検出センサの位置から移動ステップの始まる位置まで歩行する乗客の平均的な歩行時間の間で、乗客コンベアは定格速度まで加速し、その後一定速度を保つため、乗客の乗り込み時間T1、T2、又はT3の時間経過で乗客コンベアは加速(10a、10b、10c)されて定格速度に到達し、運転制御される。
なお、検出位置が移動ステップに最も近い乗客検出センサ8a、8d又は光電センサ8g,8hが最初に乗客検出した場合においては、定格速度まで加速させず、予め設定された定格速度よりも遅い速度まで安全に加速させるのみとさせることも可能である。
以上に説明した本実施例の乗客コンベアの運転制御の流れにより、乗客コンベアを運転制御すれば、乗客コンベアの手摺の近傍に乗客検出センサが設けられているので、乗客コンベアを利用する乗客の検出が行われ、乗客コンベアを利用しない乗客の誤検出の低減が可能な効果がある。
又、本発明の乗客コンベアでは、乗客コンベアの手摺の近傍に乗客検出センサが設けられていることを、乗り込み前の乗客に音声、電光サイン又は文字等で案内することにより、乗客の手の手摺への接触又近接を促し、乗客が手摺を掴むように誘導することができ、安全性の確保が可能となる。
(実施例2)
図8は、本発明の実施例2での乗客コンベアの複数の乗客検出センサを手摺の上側に配置して設けたターミナル部の側面図である。
図8は、本発明の実施例2での乗客コンベアの複数の乗客検出センサを手摺の上側に配置して設けたターミナル部の側面図である。
図8に示す様に、乗客コンベアの乗り口エリアAの水平移動部であるターミナル部で、欄干の外側に取り付け支持具83、84、85により支持して、左側の手摺32の上側に複数のセンサ8l、8m、8nを、乗客が手摺を掴むときにじゃまにならない位置に設ける。又、右側の手摺31(図示せず)の上側にも複数のセンサ8i、8j、8k(図示せず)を、欄干の外側から支持して設ける。実施例1と同様に、乗客検出センサ8i〜8nは、乗客が手摺を掴んだり、手摺りに手を置いたり近付けたりかざしたりしたときに、乗客検出ができる様に、上方の内側(ステップ側)に向かって検出領域を有する反射式センサや一定の広さの検出領域で検出可能なエリアセンサが望ましい。図8において、80、81、82は、それぞれ反射式センサである乗客検出センサ8l、8m、8nの検出領域である。
一定の広さの検出領域を持ったエリアセンサを用いる場合は、左右の欄干に1個ずつ配置することでも足りる場合もあり、1個ずつ配置としても良い。又、手摺部を掴まない乗客もいる可能性もあることから、スカート部に光電センサの受光器8gと投光器8h(図8では略)とからなる乗客検出センサを設ける。
図9は、手摺31、32の上部の高い位置にエリアセンサ91、92を設けた例を示す上面図である。走査型のエリアセンサをセンサ91、92として用いると、一定の広い検出領域93、94で、乗客が手摺を手で掴んだり、手摺に手を載せたり近づけたりかざしたりしたとき、乗客が手摺のどの位置で手摺に接触又は接近したかを検知することができる。
図9は、手摺31、32の上部の高い位置にエリアセンサ91、92を設けた例を示す上面図である。走査型のエリアセンサをセンサ91、92として用いると、一定の広い検出領域93、94で、乗客が手摺を手で掴んだり、手摺に手を載せたり近づけたりかざしたりしたとき、乗客が手摺のどの位置で手摺に接触又は接近したかを検知することができる。
又、手摺を掴まない乗客もいる可能性もあることから、スカート部(又は欄干の下部)に光電センサの受光器8gと投光器8hとからなる光透過型の光電センサを設け、通過する乗客を検出する。
(実施例3)
実施例1、2では、乗客が乗客コンベアのステップに到着するまでに、ステップの移動速度を定格速度まで到達させる加速を行うようにしたが、本実施例では、乗客が乗り込むときの乗客コンベアの速度を定格速度より遅い速度とし、この定格速度より遅い速度に到達する加速をすることが可能となる乗客コンベアの制御を説明する。
実施例1、2では、乗客が乗客コンベアのステップに到着するまでに、ステップの移動速度を定格速度まで到達させる加速を行うようにしたが、本実施例では、乗客が乗り込むときの乗客コンベアの速度を定格速度より遅い速度とし、この定格速度より遅い速度に到達する加速をすることが可能となる乗客コンベアの制御を説明する。
乗り口エリアに設置したセンサにより乗客の歩行速度を検知して、高齢者や小さな子供連れの乗客等を検出し、定格速度より速度を落として乗客コンベアを運転するなどにより、転倒防止を図る乗客コンベアがある。
本実施例の乗客コンベアは、乗客の歩行速度を検知して、高齢者や小さな子供連れ乗客等の歩行速度の遅い乗客を検出して、乗客の乗り込みまでは定格速度の半分程度の速度まで加速し、乗り込み後に定格速度又はそれ以下の速度まで到達するようにするなど、乗り込み時や降りるときの転倒防止を図る乗客コンベアである。
図10は、乗客コンベアに乗客が乗り込むときの乗客コンベアの速度を、定格速度の半分程度の速度にする例を示す乗客コンベアの加速制御のタイムチャートである。図10において、横軸は時間、縦軸は乗客コンベアの速度を示す。図10のタイムチャートにおいて、乗客の検出時Dで図3の乗客検出センサ8cで乗客が手摺を掴んだことを検出したとする。乗客検出センサ8cの位置からステップの始まる位置まで歩行する高齢者等の乗客の平均的な歩行時間T4の間で、乗客コンベアは図10の「乗り込み速度」まで加速し、その後一定速度を保つため、高齢者等の乗客は乗客コンベアが加速されていない状態で、安全に乗客コンベアに乗り込むことができる。設定された乗客の乗り込み時間T5の経過後再び乗客コンベアは加速されて時間T6で定格速度、又は定格速度より低速度の運転速度に到達し、運転制御される。
以上の乗客コンベアの運転制御により、高齢者や小さな子供連れ乗客等の乗客を検出して、乗客の乗り込み時の転倒防止を図ることができ、安全性の高い乗客コンベアを提供できる。
1 ステップ
2 欄干
3、31、32 手摺
4 スプロケット
5 チェーン
6 降り口床板
7 乗り口床板
8a〜8f、8l〜8n 乗客検出センサ
8g 光電センサの受光部
8h 光電センサの投光部
15 スカート部
20、21、22、80、81、82 反射式センサの検出領域
41、91 エリアセンサ
42、92 エリアセンサの広い検出領域
53 インバータ制御装置
13、54 乗客コンベアの制御装置
55 乗客検出センサ信号の入力
56 乗客検出位置判定部
57 乗客コンベアの制御装置の制御回路
2 欄干
3、31、32 手摺
4 スプロケット
5 チェーン
6 降り口床板
7 乗り口床板
8a〜8f、8l〜8n 乗客検出センサ
8g 光電センサの受光部
8h 光電センサの投光部
15 スカート部
20、21、22、80、81、82 反射式センサの検出領域
41、91 エリアセンサ
42、92 エリアセンサの広い検出領域
53 インバータ制御装置
13、54 乗客コンベアの制御装置
55 乗客検出センサ信号の入力
56 乗客検出位置判定部
57 乗客コンベアの制御装置の制御回路
Claims (12)
- 乗り口エリアと降り口エリアとの間を移動する無端状に連結された複数のステップを備えた移動部と、当該移動部の両側に設けられ下部にスカート部を有する欄干と、この欄干上をステップと同期して移動する手摺と、乗客コンベアの運転を制御する乗客コンベアの制御装置とを備えた乗客コンベアにおいて、
前記乗り口エリアの前記手摺の近傍に設けられた第1の乗客検出センサと、前記乗り口エリアのスカート部又は欄干に設けられた第2の乗客検出センサとを備え、
前記乗客コンベアの制御装置は、
前記乗り口エリアの前記手摺の近傍に設けられた前記第1の乗客検出センサが、前記手摺りに接触又は接近した乗客の手を検出した場合、乗客コンベアを加速又は起動して加速し、所定の速度に到達させる加速制御を行うことを特徴とする乗客コンベア。 - 請求項1において、前記制御装置は、前記第1の乗客検出センサが乗客を検出した乗客検出位置に応じた加速度で、乗客コンベアを加速又は起動して加速し、前記加速制御を行うことを特徴とする乗客コンベア。
- 請求項2において、前記制御装置は、前記第1の乗客検出センサが乗客を検出していない場合で、前記第2の乗客検出センサが乗客を検出した場合、所定の加速度で乗客コンベアを加速又は起動して加速し、所定の速度に到達させる加速制御を行うことを特徴とする乗客コンベア。
- 請求項1から3のいずれかにおいて、前記乗客コンベアの制御装置は、前記第1の乗客検出センサからのセンサ信号が入力される乗客検出位置判定部と、当該乗客検出位置判定部からの判定結果である乗客検出位置が入力される乗客コンベアの制御回路とを有し、当該乗客コンベアの制御回路は、前記乗客検出位置に応じて前記加速制御を行うことを特徴とする乗客コンベア。
- 請求項4において、前記第2の乗客検出センサからのセンサ信号は前記乗客検出位置判定部に入力され、当該乗客検出位置判定部による前記第2の乗客検出センサからのセンサ信号の検出判定結果により、前記乗客コンベアの制御回路は、前記加速制御を行うことを特徴とする乗客コンベア。
- 請求項1から5のいずれかにおいて、前記移動部の複数のステップを駆動するモータを制御するインバータ制御装置が設けられ、前記乗客コンベアの制御回路は、当該インバータ制御装置を制御して、前記加速制御を行うことを特徴とする乗客コンベア。
- 請求項1から6のいずれかにおいて、前記第1の乗客検出センサおよび前記第2の乗客検出センサが乗客を検出していない状態が所定時間継続した場合、前記乗客コンベアの制御装置は、当該乗客コンベアを利用中の乗客がいないと判定し、乗客コンベアの運転を停止させて待機状態とする制御を行うことを特徴とする乗客コンベア。
- 請求項1から6のいずれかにおいて、前記第1の乗客検出センサおよび前記第2の乗客検出センサが乗客を検出していない状態が所定時間継続した場合、前記乗客コンベアの制御装置は、当該乗客コンベアを利用中の乗客がいないと判定し、乗客コンベアの運転速度を遅くして低速運転待機状態とする制御を行うことを特徴とする乗客コンベア。
- 請求項1から8のいずれかにおいて、乗り口エリアに乗客の歩行速度を検知するセンサが設けられ、当該乗客の歩行速度を検知するセンサが歩行速度の遅い乗客を検知した場合、前記乗客コンベアの制御装置は、前記加速制御を、乗込み速度までの加速と乗込み速度での定速運転と所定時間後の再加速からなる加速制御とすることを特徴とする乗客コンベア。
- 請求項1から9のいずれかにおいて、前記第1の乗客検出センサは所定の間隔で設置された複数のセンサからなることを特徴とする乗客コンベア。
- 請求項10において、前記第1の乗客検出センサの所定の間隔で設置された複数のセンサの内、前記移動部のステップに最も近い位置のセンサが乗客を最初に検出した場合、前記乗客コンベアの制御装置は、前記加速制御により到達する前記所定速度を、乗客コンベアの定格速度未満に制御することを特徴とする乗客コンベア。
- 請求項1から9のいずれかにおいて、前記第1の乗客検出センサは一定の広さの検出領域を有するエリアセンサであることを特徴とする乗客コンベア。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013043033A JP2014169176A (ja) | 2013-03-05 | 2013-03-05 | 乗客コンベア |
| CN201410046253.2A CN104030144A (zh) | 2013-03-05 | 2014-02-10 | 乘客传送设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013043033A JP2014169176A (ja) | 2013-03-05 | 2013-03-05 | 乗客コンベア |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014169176A true JP2014169176A (ja) | 2014-09-18 |
Family
ID=51461179
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013043033A Pending JP2014169176A (ja) | 2013-03-05 | 2013-03-05 | 乗客コンベア |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2014169176A (ja) |
| CN (1) | CN104030144A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106241586A (zh) * | 2016-09-28 | 2016-12-21 | 北京小米移动软件有限公司 | 扶梯使用安全的预警方法、智能设备和系统 |
| JP2018020872A (ja) * | 2016-08-02 | 2018-02-08 | フジテック株式会社 | 乗客コンベア |
| JP2020111414A (ja) * | 2019-01-09 | 2020-07-27 | フジテック株式会社 | 乗客コンベア |
| JP2021138500A (ja) * | 2020-03-05 | 2021-09-16 | フジテック株式会社 | マンコンベヤ |
| WO2022238324A1 (de) * | 2021-05-14 | 2022-11-17 | Tk Elevator Innovation And Operations Gmbh | Handlaufsystem für eine personenbeförderungsvorrichtung aufweisend mindestens einer elektro-felderzeugungsvorrichtung und mindestens einer elektro-felderfassungsvorrichtung und verfahren zum steuern dieses handlaufsystems |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108100842A (zh) * | 2016-11-25 | 2018-06-01 | 东芝电梯株式会社 | 乘客输送机 |
| JP2021070551A (ja) * | 2019-10-30 | 2021-05-06 | 株式会社日立製作所 | 乗客コンベア |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1097898B1 (en) * | 1999-05-17 | 2005-10-05 | Mitsubishi Denki Kabushiki Kaisha | Controller of passenger conveyor and passenger sensor |
| JP2004099266A (ja) * | 2002-09-11 | 2004-04-02 | Hitachi Ltd | 乗客コンベア |
| JP4754928B2 (ja) * | 2005-10-13 | 2011-08-24 | 株式会社日立製作所 | 可変速型乗客コンベア及びその運転方法 |
| JP2012012188A (ja) * | 2010-07-02 | 2012-01-19 | Mitsubishi Electric Corp | 乗客コンベアの自動運転制御装置 |
-
2013
- 2013-03-05 JP JP2013043033A patent/JP2014169176A/ja active Pending
-
2014
- 2014-02-10 CN CN201410046253.2A patent/CN104030144A/zh active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018020872A (ja) * | 2016-08-02 | 2018-02-08 | フジテック株式会社 | 乗客コンベア |
| CN106241586A (zh) * | 2016-09-28 | 2016-12-21 | 北京小米移动软件有限公司 | 扶梯使用安全的预警方法、智能设备和系统 |
| JP2020111414A (ja) * | 2019-01-09 | 2020-07-27 | フジテック株式会社 | 乗客コンベア |
| JP2021138500A (ja) * | 2020-03-05 | 2021-09-16 | フジテック株式会社 | マンコンベヤ |
| JP7001976B2 (ja) | 2020-03-05 | 2022-01-20 | フジテック株式会社 | マンコンベヤ |
| WO2022238324A1 (de) * | 2021-05-14 | 2022-11-17 | Tk Elevator Innovation And Operations Gmbh | Handlaufsystem für eine personenbeförderungsvorrichtung aufweisend mindestens einer elektro-felderzeugungsvorrichtung und mindestens einer elektro-felderfassungsvorrichtung und verfahren zum steuern dieses handlaufsystems |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104030144A (zh) | 2014-09-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014169176A (ja) | 乗客コンベア | |
| JP4353763B2 (ja) | 自動運転方式マンコンベア | |
| JP2009137738A (ja) | 乗客コンベアの安全装置および安全制御方法 | |
| JP6262287B2 (ja) | 乗客コンベア | |
| JP2013067442A (ja) | 乗客コンベア及び乗客コンベアの運転表示装置 | |
| JP6066774B2 (ja) | 乗客コンベア | |
| TW200536771A (en) | Passenger conveyor | |
| JP2012148832A (ja) | エスカレーターの制御装置 | |
| JP4771703B2 (ja) | 乗客コンベア | |
| JP2007022683A (ja) | 乗客コンベア | |
| KR100510420B1 (ko) | 승객 컨베이어 장치 | |
| JP2004099266A (ja) | 乗客コンベア | |
| JP5623492B2 (ja) | 乗客コンベア | |
| JP6321126B1 (ja) | 乗客コンベア | |
| JP2012236654A (ja) | 乗客コンベアの制御装置 | |
| JP5676792B1 (ja) | 乗客コンベア | |
| JP2012236660A (ja) | 乗客コンベアの安全装置 | |
| KR102308850B1 (ko) | 에스컬레이터 및 무빙워크의 안전운행 제어장치 | |
| JP7435655B2 (ja) | 乗客コンベアの自動発停止運転方法 | |
| JP7218273B2 (ja) | 乗客コンベア | |
| JP2003104680A (ja) | 乗客コンベア装置 | |
| JP7327552B1 (ja) | 乗客コンベア | |
| JP2000007257A (ja) | 可変速式乗客コンベア | |
| KR101954279B1 (ko) | 속도 가변형 핸드레일을 갖는 에스컬레이터 또는 무빙 워크 및 그것의 제어 방법 | |
| JP2004051293A (ja) | 乗客コンベアの運転装置 |