JP2014046801A - ステアバイワイヤの操舵反力制御装置 - Google Patents
ステアバイワイヤの操舵反力制御装置 Download PDFInfo
- Publication number
- JP2014046801A JP2014046801A JP2012191062A JP2012191062A JP2014046801A JP 2014046801 A JP2014046801 A JP 2014046801A JP 2012191062 A JP2012191062 A JP 2012191062A JP 2012191062 A JP2012191062 A JP 2012191062A JP 2014046801 A JP2014046801 A JP 2014046801A
- Authority
- JP
- Japan
- Prior art keywords
- reaction force
- steering
- steering reaction
- value
- steer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/008—Control of feed-back to the steering input member, e.g. simulating road feel in steer-by-wire applications
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Abstract
【解決手段】 このステアバイワイヤの操舵反力制御装置は、ステアリング制御手段16に、車両運動モデル20から転舵反力または車両挙動を表すパラメータの推定値を演算する転舵反力等推定手段17と、転舵反力等推定手段17で演算された前記推定値と、転舵反力センサ8から検出した検出値とを比較し、定められた条件に従って、前記推定値および前記検出値のいずれか一方を選択する比較手段18とを設ける。さらに比較手段18で選択された前記推定値または前記検出値を操舵反力の生成に用いる操舵反力生成手段19を設ける。
【選択図】 図2
Description
またステアリングホイールを含む操舵部と、タイヤの向きを変える転舵機構部との機械的な連結があるEPS等の操舵装置において、ステアリングホイールの回動操作による操舵トルクに付与するアシストトルクを算出する際、車両運動モデルを用いて操舵感を変化させているものもある(特許文献3)。
特許文献2では、車両の挙動状態を示す取得値をそのまま用いているため、高周波成分の影響により、状況によっては操舵感が悪化するものと思われる。
前記ステアリング制御手段16に、
車両運動モデル20から転舵反力の推定値を演算する転舵反力等推定手段17と、
この転舵反力等推定手段17で演算された転舵反力の推定値と、前記転舵機構7に作用する転舵反力を検出するセンサ8から検出した検出値とを比較し、定められた条件に従って、前記推定値および前記検出値のいずれか一方を選択する比較手段18と、
この比較手段18で選択された前記推定値または前記検出値を操舵反力の生成に用いる操舵反力生成手段19とを設けたことを特徴とする。
前記タイロッド間シャフト6またはタイロッド5に、前記転舵反力センサ8を設けたものであっても良い。この構成によると、このステアバイワイヤ式操舵装置を、タイロッド間シャフトと機械的に連結されているEPSのフィーリングに近づけることが可能となる。
図1は、この実施形態に係る操舵反力制御装置を備えたステアバイワイヤ式操舵装置の概略構成とその制御系の概念構成を示す説明図である。同図1に示すように、ステアバイワイヤ式操舵装置は、ステアリングホイール1と、操舵機構2と、左右の操舵輪3,3にナックルアーム4およびタイロッド5を介して連結された転舵用のタイロッド間シャフト6と、転舵機構7と、転舵反力センサ8と、車速センサ9や加速度センサ10等の他のセンサ類11と、操舵反力制御装置としてのECU(電気制御ユニット)12とを備える。このECU12は後述のステアリング制御手段を含み、マイクロコンピュータおよびその制御プログラムを含む電子回路等により構成される。
転舵機構7は、タイロッド間シャフト6を駆動する転舵モータ15を含む。この転舵モータ15は、その回転をタイロッド間シャフト6に軸方向移動として伝える。転舵反力センサ8は、転舵機構7に作用する転舵反力を検出するセンサであって、例えば、ロードセルや荷重センサ等が適用されて例えばタイロッド5に設けられる。この場合、転舵モータ15を回転させると、タイロッド5が軸方向に移動することで、転舵反力センサ8は、タイロッド5に付与される軸方向の力を前記荷重支持部の変位として検出し電気信号に変換する。なおこの例では、タイロッド4,4にそれぞれ転舵反力センサ8,8を設けているが、一方のタイロッド4のみに転舵反力センサ8を設けても良い。またタイロッド間シャフト6に転舵反力センサ8を設けることも可能である。
・Y軸方向、Z軸周り(ヨー)、およびX軸周り(ロール)の運動を記述する3自由度モデルとする。
・左右輪に作用する横力の違いを考慮するため、4輪モデルとする。
・タイヤ横力はY軸の向きと一致する。
・車両はX軸方向(直進)に一定速Vで運動する。
mV(β+ψ)=FfL+FfR+FrL+FrR ・・・・(1)
ここで、mは車両質量、Fは各タイヤに作用する横力を表す。βは車体の横すべり角、ψはヨー角速度を表す。横力Fの下付き添え字について、一文字目は前後(front or rear)を、二文字目は左右(Left or Right)を意味する。例えば、FfLは左前輪に作用する横力を指している。
IZψ+IXZφ=If(FfL+FfR)−Ir(FrL+FrR) ・・・・(2)
となる。IZはヨー慣性モーメント、IXZはヨー・ロール慣性乗積、IfとIrは車両重心から前後車軸までの距離を表す。φはロール角を表す。
IXφ+Cφφ+(Kφ−mghc)φ+IXZψ
=hf(FfL+FfR)+(FrL+FrR) ・・・・(3)
となる。IXはロール慣性モーメント、Cφはロール減衰係数、Kφはロール剛性を表す。車両重心点におけるロールモーメントアーム長さhcは、前後車軸におけるロールモーメントアーム長さhf,hrを用いて
hc=(hfIr+hrIf)/(If+Ir) ・・・・(4)
と表される。以上の連成した3つの運動方程式を解いて、車体の横すべり角β、ヨー角速度ψ、ロール角φ、および横力Fを求めることで車両の運動状態を把握でき、横力とニューマティックトレール、ナックルアーム長のジオメトリより、転舵反力値が算出される。
ステップS2において車速が定められた値Vs未満のとき(ステップS2:NO)、またはステップS5において転舵反力の推定値Fyaと実転舵反力Fybとの差分が閾値Fysより大きいとき(ステップS5:NO)、ステップS7に移行する。
操舵反力生成手段19は、操舵角に比例したばね成分(ばね項)、操舵角速度に比例した粘性成分(粘性項)、操舵角加速度に比例した慣性成分(慣性項)、および摩擦成分(摩擦項)を前記操舵反力の生成に用いるものとしたため、ステアリングホイール操作時の違和感、振動等を防ぐことができ、また従来のEPS等の操舵装置と同様の手応えを得ることが可能となる。
以下の説明において、構成の一部のみを説明している場合、構成の他の部分は、先行して説明している形態と同様とする。実施の各形態で具体的に説明している部分の組合せばかりではなく、特に組合せに支障が生じなければ、実施の形態同士を部分的に組合せることも可能である。
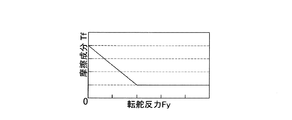
図5の例に示すように、転舵反力Fyと摩擦成分Tfとの関係について、転舵反力が大きい程、摩擦成分つまり摩擦項を小さくし、転舵反力がある閾値以上で摩擦成分を一定値となるように定めても良い。この場合、転舵反力が小さい場合に、転舵反力に応じて必要な摩擦成分を付与することができる。
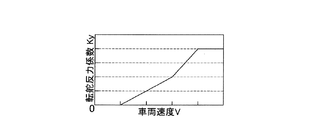
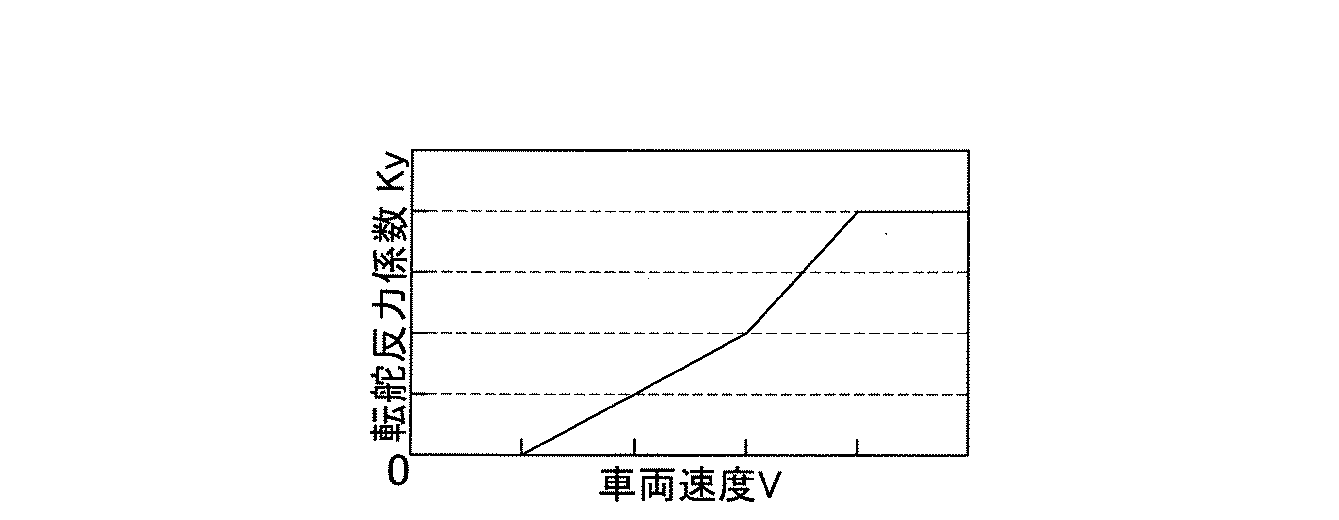
図6の例に示すように、車両速度Vに応じて転舵反力係数Kyを可変させ、車両速度が一定速度以上で転舵反力係数が一定値となるように定めても良い。この場合、例えば、高速域ではより安定した操舵反力を得ることができ、中低速域では小さい力でも操作し易い操舵反力を得ることができる。
図7の場合、車両挙動を表すパラメータとして、ヨーレイト、ロールレイト、ヨー角、ロール角、および横加速度のいずれかを推定して前記推定値として用いたため、今までのステアバイワイヤ式の操舵装置では出せなかった車両挙動を、転舵反力に反映させて出力することが可能となり、操作者の好みや車両の種類等に応じた操舵装置を実現することができる。
6…タイロッド間シャフト
7…転舵機構
10…加速度センサ
13…操舵反力モータ
14…操舵角センサ
15…転舵モータ
16…ステアリング制御手段
17…転舵反力等推定手段
18…比較手段
19…操舵反力生成手段
20…車両運動モデル
Claims (6)
- 転舵用のタイロッド間シャフトと機械的に連結されていないステアリングホイールに対し、操舵角を検出する操舵角センサと、操舵反力を与える操舵反力モータと、前記操舵角センサの検出した操舵角を基に、車両に装備された他のセンサ類からの運転状態検出信号と合わせて転舵角の指令信号を生成し、タイロッド間シャフトを駆動する転舵機構の転舵モータを制御するステアリング制御手段とを有するステアバイワイヤ式操舵装置における、操舵反力制御装置であって、
前記ステアリング制御手段に、
車両運動モデルから、転舵反力または車両挙動を表すパラメータの推定値を演算する転舵反力等推定手段と、
この転舵反力等推定手段で演算された前記推定値と、前記転舵機構に作用する転舵反力を検出するセンサから検出した検出値とを比較し、定められた条件に従って、前記推定値および前記検出値のいずれか一方を選択する比較手段と、
この比較手段で選択された前記推定値または前記検出値を操舵反力の生成に用いる操舵反力生成手段と、
を設けたことを特徴とするステアバイワイヤの操舵反力制御装置。 - 請求項1において、前記比較手段は、前記定められた条件として、車両速度が定められた値以上のときに前記推定値と前記検出値の差分が閾値以下であれば、前記車両運動モデルからの前記推定値を選択し、これら車両速度および差分の条件を充足しないときは、前記検出値を選択するステアバイワイヤの操舵反力制御装置。
- 請求項1または請求項2において、前記タイロッド間シャフトまたはタイロッドに、前記転舵反力センサを設けたステアバイワイヤの操舵反力制御装置。
- 請求項1において、前記転舵反力等推定手段は、前記車両運動モデルから、車両挙動を表すパラメータとして、ヨーレイト、ロールレイト、ヨー角、ロール角、および横加速度のいずれかを推定して前記生成値として用いるステアバイワイヤの操舵反力制御装置。
- 請求項1ないし請求項4のいずれか1項において、前記操舵反力生成手段は、操舵角に比例したばね成分、操舵角速度に比例した粘性成分、操舵角加速度に比例した慣性成分、および摩擦成分のいずれかを前記操舵反力の生成に用いるステアバイワイヤの操舵反力制御装置。
- 請求項1ないし請求項5のいずれか1項において、前記操舵反力生成手段は、車両速度に応じて、前記操舵反力を変化させるステアバイワイヤの操舵反力制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012191062A JP5925640B2 (ja) | 2012-08-31 | 2012-08-31 | ステアバイワイヤの操舵反力制御装置 |
| US14/424,834 US9771102B2 (en) | 2012-08-31 | 2013-08-26 | Steer-by-wire steering reaction force control device |
| EP13833687.0A EP2891591B1 (en) | 2012-08-31 | 2013-08-26 | Steer-by-wire steering reaction force control device |
| PCT/JP2013/072692 WO2014034597A1 (ja) | 2012-08-31 | 2013-08-26 | ステアバイワイヤの操舵反力制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012191062A JP5925640B2 (ja) | 2012-08-31 | 2012-08-31 | ステアバイワイヤの操舵反力制御装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016045191A Division JP6199426B2 (ja) | 2016-03-09 | 2016-03-09 | ステアバイワイヤの操舵反力制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014046801A true JP2014046801A (ja) | 2014-03-17 |
| JP5925640B2 JP5925640B2 (ja) | 2016-05-25 |
Family
ID=50183409
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012191062A Expired - Fee Related JP5925640B2 (ja) | 2012-08-31 | 2012-08-31 | ステアバイワイヤの操舵反力制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9771102B2 (ja) |
| EP (1) | EP2891591B1 (ja) |
| JP (1) | JP5925640B2 (ja) |
| WO (1) | WO2014034597A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200140627A (ko) * | 2019-06-07 | 2020-12-16 | 주식회사 만도 | 조향 제어 장치, 조향 제어 방법 및 이를 포함하는 조향 보조 시스템 |
| KR20200141728A (ko) * | 2019-06-11 | 2020-12-21 | 현대모비스 주식회사 | 차량의 전자식 조향장치 및 그 제어방법 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5990606B2 (ja) * | 2015-02-10 | 2016-09-14 | 本田技研工業株式会社 | 操舵装置及び操舵支援方法 |
| US9731761B1 (en) * | 2016-06-07 | 2017-08-15 | Ford Global Technologies, Llc | Steering-wheel control |
| JP6279121B1 (ja) * | 2017-03-24 | 2018-02-14 | 株式会社ショーワ | 制御装置、および、ステアリング装置 |
| US11254361B2 (en) | 2019-03-25 | 2022-02-22 | Volvo Car Corporation | Steer-by-wire systems and methods providing tire force buildup compensation |
| KR102173996B1 (ko) * | 2019-05-16 | 2020-11-04 | 주식회사 만도 | 조향 제어 장치와 그 방법, 및 조향 제어 시스템 |
| CN110606121B (zh) * | 2019-08-28 | 2021-02-19 | 中国第一汽车股份有限公司 | 一种线控转向路感模拟控制方法 |
| US11541862B2 (en) | 2020-08-27 | 2023-01-03 | Deere & Company | Operator selectable steering mode with variable torque feedback and system thereof |
| US11685427B2 (en) | 2021-04-12 | 2023-06-27 | Toyota Material Handling, Inc. | Electric actuator steering system for forklifts |
| US12522277B2 (en) | 2021-07-20 | 2026-01-13 | Toyota Material Handling, Inc. | Forklift steer-by-wire control system |
| US12263896B2 (en) | 2021-12-16 | 2025-04-01 | Deere & Company | Multi-selectable application mode steering system and method thereof |
| US12344251B2 (en) | 2021-12-16 | 2025-07-01 | Deere & Company | Multi-selectable application mode steering system and method thereof |
| CA3209767A1 (en) | 2022-09-28 | 2024-03-28 | Toyota Material Handling, Inc. | Synchronized steering control systems for forklifts |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10258750A (ja) * | 1997-03-19 | 1998-09-29 | Toyota Motor Corp | 操舵制御装置 |
| JP2000108914A (ja) * | 1998-10-02 | 2000-04-18 | Toyota Motor Corp | 操舵制御装置 |
| JP2001301638A (ja) * | 2000-04-24 | 2001-10-31 | Nissan Motor Co Ltd | 車両の操舵装置 |
| JP2004161198A (ja) * | 2002-11-15 | 2004-06-10 | Toyoda Mach Works Ltd | ステアリング制御装置 |
| JP2007237938A (ja) * | 2006-03-09 | 2007-09-20 | Nissan Motor Co Ltd | 車両用操舵制御装置 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6032757A (en) * | 1997-01-22 | 2000-03-07 | Toyota Jidosha Kabushiki Kaisha | Steering control apparatus |
| JP3517863B2 (ja) * | 1997-02-07 | 2004-04-12 | トヨタ自動車株式会社 | 操舵制御装置 |
| JP3580658B2 (ja) | 1997-03-18 | 2004-10-27 | トヨタ自動車株式会社 | 操舵制御装置 |
| DE10021814B4 (de) * | 2000-05-04 | 2006-09-07 | Daimlerchrysler Ag | Lenksystem für ein Kraftfahrzeug |
| US6655490B2 (en) * | 2000-08-11 | 2003-12-02 | Visteon Global Technologies, Inc. | Steer-by-wire system with steering feedback |
| US6481526B1 (en) * | 2000-11-13 | 2002-11-19 | Delphi Technologies, Inc. | Steer-by-wire handwheel actuator incorporating mechanism for variable end-of-travel |
| JP2002160642A (ja) * | 2000-11-28 | 2002-06-04 | Honda Motor Co Ltd | 車両の運転操作装置 |
| US6484839B2 (en) * | 2000-12-01 | 2002-11-26 | Delphi Technologies, Inc. | Steer-by-wire rotary actuator |
| US6554095B2 (en) * | 2001-04-06 | 2003-04-29 | Visteon Global Technologies, Inc. | Torque-based steering system for steer by wire vehicles |
| NL1018627C2 (nl) * | 2001-07-25 | 2003-01-28 | Skf Ab | Stuureenheid voor besturing via draad. |
| EP1429940A4 (en) * | 2001-09-14 | 2007-06-06 | Delphi Tech Inc | COMPENSATION USING POSITION DATA TO PROVIDE INCREASED TOUCH RESTITUTION AND STABILITY IN A STEERING SYSTEM |
| US8397883B2 (en) * | 2001-10-25 | 2013-03-19 | Lord Corporation | Brake with field responsive material |
| JP4107471B2 (ja) * | 2001-11-19 | 2008-06-25 | 三菱電機株式会社 | 車両用操舵装置 |
| US20030150366A1 (en) * | 2002-02-13 | 2003-08-14 | Kaufmann Timothy W. | Watercraft steer-by-wire system |
| US7100733B2 (en) * | 2002-07-22 | 2006-09-05 | Visteon Global Technologies, Inc. | Method to initialize steering wheel in a steer-by-wire system |
| JP3964771B2 (ja) * | 2002-10-11 | 2007-08-22 | 株式会社豊田中央研究所 | 路面状態推定装置、及び該装置を備えた車両の運動制御装置 |
| JP3836422B2 (ja) * | 2002-11-27 | 2006-10-25 | ナブテスコ株式会社 | 翼駆動装置 |
| JP2004314891A (ja) * | 2003-04-18 | 2004-11-11 | Toyoda Mach Works Ltd | 車両用操舵装置 |
| JP4432362B2 (ja) | 2003-05-16 | 2010-03-17 | トヨタ自動車株式会社 | 車両用電動パワーステアリング装置 |
| US6899196B2 (en) * | 2003-10-16 | 2005-05-31 | Visteon Global Technologies, Inc. | Driver interface system for steer-by-wire system |
| EP1616746B1 (en) * | 2004-07-15 | 2010-02-24 | Hitachi, Ltd. | Vehicle control system |
| JP4379261B2 (ja) * | 2004-08-30 | 2009-12-09 | 日産自動車株式会社 | 車両用操舵装置 |
| US7664584B2 (en) * | 2005-03-01 | 2010-02-16 | Nissan Motor Co., Ltd. | Steering control system |
| JP4915268B2 (ja) * | 2006-12-22 | 2012-04-11 | 株式会社エクォス・リサーチ | 車両用制御装置 |
| JP4851485B2 (ja) * | 2007-04-27 | 2012-01-11 | 本田技研工業株式会社 | 車両用制御装置およびシートベルト装置の制御方法 |
| JP5573530B2 (ja) * | 2010-09-15 | 2014-08-20 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6138655B2 (ja) * | 2013-10-10 | 2017-05-31 | 日立オートモティブシステムズ株式会社 | 車両の運動制御装置 |
| JP5915680B2 (ja) * | 2014-03-20 | 2016-05-11 | トヨタ自動車株式会社 | 操舵制御装置 |
-
2012
- 2012-08-31 JP JP2012191062A patent/JP5925640B2/ja not_active Expired - Fee Related
-
2013
- 2013-08-26 EP EP13833687.0A patent/EP2891591B1/en not_active Not-in-force
- 2013-08-26 US US14/424,834 patent/US9771102B2/en active Active
- 2013-08-26 WO PCT/JP2013/072692 patent/WO2014034597A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10258750A (ja) * | 1997-03-19 | 1998-09-29 | Toyota Motor Corp | 操舵制御装置 |
| JP2000108914A (ja) * | 1998-10-02 | 2000-04-18 | Toyota Motor Corp | 操舵制御装置 |
| JP2001301638A (ja) * | 2000-04-24 | 2001-10-31 | Nissan Motor Co Ltd | 車両の操舵装置 |
| JP2004161198A (ja) * | 2002-11-15 | 2004-06-10 | Toyoda Mach Works Ltd | ステアリング制御装置 |
| JP2007237938A (ja) * | 2006-03-09 | 2007-09-20 | Nissan Motor Co Ltd | 車両用操舵制御装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200140627A (ko) * | 2019-06-07 | 2020-12-16 | 주식회사 만도 | 조향 제어 장치, 조향 제어 방법 및 이를 포함하는 조향 보조 시스템 |
| KR102666079B1 (ko) | 2019-06-07 | 2024-05-16 | 에이치엘만도 주식회사 | 조향 제어 장치, 조향 제어 방법 및 이를 포함하는 조향 보조 시스템 |
| KR20200141728A (ko) * | 2019-06-11 | 2020-12-21 | 현대모비스 주식회사 | 차량의 전자식 조향장치 및 그 제어방법 |
| KR102646187B1 (ko) * | 2019-06-11 | 2024-03-11 | 현대모비스 주식회사 | 차량의 전자식 조향장치 및 그 제어방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5925640B2 (ja) | 2016-05-25 |
| EP2891591A1 (en) | 2015-07-08 |
| EP2891591B1 (en) | 2017-12-27 |
| US9771102B2 (en) | 2017-09-26 |
| US20150232122A1 (en) | 2015-08-20 |
| WO2014034597A1 (ja) | 2014-03-06 |
| EP2891591A4 (en) | 2016-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5925640B2 (ja) | ステアバイワイヤの操舵反力制御装置 | |
| JP5445532B2 (ja) | 車両制御装置、車両制御プログラム、および車両制御方法 | |
| KR101601494B1 (ko) | 안정화기 장치의 작동 방법 | |
| CN104276000B (zh) | 用于控制侧倾稳定系统的力矩的方法和控制装置 | |
| JP6810779B1 (ja) | 状態量算出装置、制御装置および車両 | |
| JP5326869B2 (ja) | 積載重量検出装置および積載重量検出方法 | |
| CN113242827B (zh) | 用于确定线控转向系统的转向感的方法 | |
| US12291263B2 (en) | Vehicle control device and characteristic estimation method | |
| JP4340118B2 (ja) | 車両用操舵装置 | |
| JP6199426B2 (ja) | ステアバイワイヤの操舵反力制御装置 | |
| CN104960571A (zh) | 转向装置和用于评估齿条力的方法 | |
| JP5911482B2 (ja) | 操舵角を電気機械的に調整するための方法および電気機械式ステアリングを備えた自動車 | |
| JP4568996B2 (ja) | 操舵装置と操舵装置の抗力算出装置 | |
| JP5751241B2 (ja) | 車両操舵装置及びプログラム | |
| JP2011110952A (ja) | 車両運動制御装置 | |
| KR101694764B1 (ko) | 조향 제어 장치 및 조향 제어 방법 | |
| JP2003081119A (ja) | 自動車の電動パワーステアリング装置 | |
| JP2006096230A (ja) | 車両運動制御装置および車両運動制御方法 | |
| JP5267799B2 (ja) | 車両の操舵制御装置 | |
| JP6900877B2 (ja) | ステアバイワイヤシステム | |
| JP5326562B2 (ja) | 旋回挙動検出装置、旋回挙動検出方法、及びヨーレート推定方法 | |
| JP5906802B2 (ja) | 舵角検出装置、舵角検出方法、及びプログラム | |
| JP2009051445A (ja) | 車両挙動状態推定装置 | |
| JP5910265B2 (ja) | 車両制御装置 | |
| JP2008247248A (ja) | 車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160309 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160405 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160420 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5925640 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |