JP2013166399A - 車両の制御装置 - Google Patents
車両の制御装置 Download PDFInfo
- Publication number
- JP2013166399A JP2013166399A JP2012029142A JP2012029142A JP2013166399A JP 2013166399 A JP2013166399 A JP 2013166399A JP 2012029142 A JP2012029142 A JP 2012029142A JP 2012029142 A JP2012029142 A JP 2012029142A JP 2013166399 A JP2013166399 A JP 2013166399A
- Authority
- JP
- Japan
- Prior art keywords
- clutch
- vehicle
- shift
- operation member
- transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Regulating Braking Force (AREA)
Abstract
【課題】車両の運転者が坂道発進用ブレーキ液圧制御を必要としているときにのみ、坂道発進用ブレーキ液圧制御が開始・実行され得る車両の制御装置を提供すること。
【解決手段】「車両が停止状態にあり、且つ、ブレーキペダルが制動操作されていて、且つ、シフトレバーが走行用変速段(1速〜5速、R)のうちの何れか1つに対応するシフト位置にあると判定されている場合」において、クラッチペダルの位置が、踏み戻し方向(クラッチトルクの増加方向)に移動しながら、クラッチストロークaに対応する位置を通過した後に、「検出領域(クラッチストロークa〜b)」内に所定時間Tに亘って維持されたと判定された場合、坂道発進用ブレーキ液圧制御が開始・実行される。
【選択図】図5
【解決手段】「車両が停止状態にあり、且つ、ブレーキペダルが制動操作されていて、且つ、シフトレバーが走行用変速段(1速〜5速、R)のうちの何れか1つに対応するシフト位置にあると判定されている場合」において、クラッチペダルの位置が、踏み戻し方向(クラッチトルクの増加方向)に移動しながら、クラッチストロークaに対応する位置を通過した後に、「検出領域(クラッチストロークa〜b)」内に所定時間Tに亘って維持されたと判定された場合、坂道発進用ブレーキ液圧制御が開始・実行される。
【選択図】図5
Description
本発明は、車両の制御装置に関する。
従来より、車両の運転者により操作されるシフト操作部材のシフト位置に応じて変速段が選択されるトルクコンバータを備えない手動変速機と、クラッチとを備えた車両の制御装置が知られている。
この手動変速機は、車両の動力源の出力軸から動力が入力される入力軸と、車両の駆動輪へ動力を出力する出力軸と、変速機の入力軸と変速機の出力軸との間で動力伝達系統が確立され且つ減速比(出力軸の回転速度に対する入力軸の回転速度の割合)が異なる複数の走行用変速段と、変速機の入力軸と変速機の出力軸との間で動力伝達系統が確立されないニュートラル段とを備える。シフト操作部材を複数の走行用変速段のうちの何れか1つに対応するシフト位置に移動することにより、対応する走行用変速段が選択・実現される。また、シフト操作部材をニュートラル段に対応するシフト位置に移動することにより、ニュートラル段が選択・実現される。
上記クラッチは、動力源の出力軸と変速機の入力軸との間に介装される。車両の運転者により操作されるクラッチ操作部材の位置の調整によって、クラッチトルク(動力源の出力軸と変速機の入力軸との間においてクラッチが伝達可能な最大トルク)が調整され得る。
車両の坂道発進に際し、操作性向上、及び安全性向上の観点に基づき、以下の車両の制御装置が開発されてきている。この制御装置は、上記手動変速機と、上記クラッチと、坂道発進用ブレーキ液圧制御を開始・実施する制御手段とを備えている。この坂道発進用ブレーキ液圧制御は、運転者による制動操作部材の操作に依存せずに車両の車輪に制動力を与えるブレーキ液圧を発生するものである。
下記特許文献1には、上記車両の制御装置の一例が記載されている。上記坂道発進用ブレーキ液圧制御を開始・実施する制御手段は、車両が傾斜路上に存在するか否かを検出する坂道検出手段からの検出情報に基づき、坂道発進用ブレーキ液圧制御が必要であると判定したときに、坂道発進用ブレーキ液圧制御を開始・実行する。これにより、車両の坂道発進に際し、運転者による制動操作部材の操作に依存せずに車両の車輪に制動力が与えられる。従って、車両を降坂させることなく、坂道発進に係る操作が運転者により実施され得る。
ところで、上述した「坂道発進用ブレーキ液圧制御が必要である」との判定においては、誤判定が生じる場合がある。これは、上記判定が、運転者の要求とは別に、坂道検出手段からの検出情報に基づくことに起因する。この誤判定のため、例えば、傾斜路が非常に緩やかである場合等、車両の運転者が坂道発進用ブレーキ液圧制御を必要としないときであっても、この制御が開始・実行されてしまう場合があるという問題があった。
以上のことを鑑み、本発明の目的は、車両の運転者が坂道発進用ブレーキ液圧制御を必要としているときにのみ、坂道発進用ブレーキ液圧制御が開始・実行され得る車両の制御装置を提供することにある。
本発明に係る車両の制御装置は、手動変速機(M/T)と、クラッチ(C/T)と、第1判定手段(P5、ECU)と、第2判定手段(P2、ECU)と、第3判定手段(P4、ECU)と、制御手段(BRK、ECU)とを備える。
前記手動変速機(M/T)は、車両の運転者により操作されるシフト操作部材(SL)のシフト位置に応じて変速段が選択されるトルクコンバータを備えない変速機である。前記手動変速機(M/T)は、前記車両の動力源(E/G)の出力軸(Ae)から動力が入力される入力軸(Ai)と、前記車両の駆動輪へ動力を出力する出力軸(Ao)と、前記変速機の入力軸(Ai)と前記変速機の出力軸(Ao)との間で動力伝達系統が確立され且つ前記出力軸(Ao)の回転速度に対する前記入力軸(Ai)の回転速度の割合である減速比が異なる複数の走行用変速段(1速〜5速、R)と、前記変速機の入力軸(Ai)と前記変速機の出力軸(Ao)との間で動力伝達系統が確立されないニュートラル段(N)とを備える。前記手動変速機(M/T)は、前記シフト操作部材を前記複数の走行用変速段のうちの何れか1つに対応するシフト位置に移動することにより対応する前記走行用変速段が選択・実現され、前記シフト操作部材を前記ニュートラル段に対応するシフト位置に移動することにより前記ニュートラル段が選択・実現されるように構成される。
前記クラッチ(C/T)は、前記動力源の出力軸(Ae)と前記変速機の入力軸(Ai)との間に介装される。前記クラッチ(C/T)は、前記車両の運転者により操作されるクラッチ操作部材(CP)の位置の調整によって前記動力源の出力軸(Ae)と前記変速機の入力軸(Ai)との間においてクラッチ(C/T)が伝達可能な最大トルクであるクラッチトルクを調整可能に構成される。
「クラッチ操作部材(CP)」は、例えば、運転者の足による踏み込み、又は踏み戻しで位置が調整されるクラッチペダルであり、これに限定されない。クラッチ操作部材(CP)として上記クラッチペダルが用いられる場合、クラッチトルクは、上記クラッチペダルの踏み戻し方向への移動量が大きいほどより大きくなるよう調整され得る。
前記第1判定手段(P5、ECU)は、前記車両が停止状態にあるか否かを判定する。前記第2判定手段(P2、ECU)は、前記車両の運転者により操作される制動操作部材(BP)が操作されているか否かを判定する。前記第3判定手段(P4、ECU)は、前記シフト操作部材(SL)が前記複数の走行用変速段のうちの何れか1つに対応するシフト位置にあるか否かを判定する。
前記制御手段(BRK、ECU)は、「前記車両が停止状態にあり、且つ、前記制動操作部材(BP)が操作されていて、且つ、前記シフト操作部材(SL)が前記複数の走行用変速段のうちの何れか1つに対応するシフト位置にあると判定されている場合」において、前記クラッチ操作部材(CP)の位置が前記クラッチトルクの増加方向に移動しながら第1位置(a)を通過したことに基づいて、前記運転者による制動操作部材(BP)の操作に依存せずに前記車両の車輪に制動力を与えるブレーキ液圧を発生する坂道発進用ブレーキ液圧制御を開始・実行する。
また、前記制御手段は、前記クラッチ操作部材(CP)の位置が前記第1位置(a)を通過した後、前記クラッチ操作部材(CP)の位置が、前記第1位置と、前記第1位置に対して前記クラッチトルクの増加方向にある第2位置(b)との間に所定時間(T)に亘って維持されたことに基づいて、前記坂道発進用ブレーキ液圧制御を開始・実行するように構成され得る。
クラッチ操作部材(CP)の「クラッチトルクの増加方向」への移動は、例えば、クラッチ操作部材として、上記クラッチペダルが利用される場合、上記クラッチペダルの踏み戻し方向への移動であってもよい。「第1位置(a)」は、例えば、このクラッチペダルの踏み戻し方向への移動に際し、クラッチペダルが通過する所定の位置であってもよい。「第2位置(b)」は、このクラッチペダルの踏み戻し方向への移動に際し、クラッチペダルが「第1位置(a)」を通過した後に通過する所定の位置であって、踏み戻し方向への移動量が「第1位置(a)」に対応するものよりも大きい位置であってもよい。
前記第1位置(a)は、前記クラッチトルクがゼロになる領域内に設定され得る。また、前記第2位置(b)は、前記クラッチトルクがゼロから増加開始する位置(p)に対して前記クラッチトルクの増加方向の位置に設定され得る。
前記制御手段は、前記坂道発進用ブレーキ液圧制御の実行中において、前記車両の運転者により操作される加速操作部材(AP)が操作されたことに基づいて、前記坂道発進用ブレーキ液圧制御を終了するように構成され得る。
上記構成によれば、坂道発進用ブレーキ液圧制御が、運転者の操作に基づき開始・実行される。従って、車両の運転者が坂道発進用ブレーキ液圧制御を必要としているときにのみ、坂道発進用ブレーキ液圧制御が開始・実行され得る。また、坂道発進用ブレーキ液圧制御を開始・実行するにあたり、坂道検出手段(例えば、角度センサ、加速度センサ等)が不要となり得る。
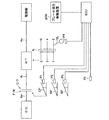
以下、本発明の実施形態に係る車両の制御装置(以下、「本装置」と呼ぶこともある。)について図面を参照しながら説明する。図1は、本装置を搭載した車両の概略構成を示している。
この車両は、エンジンE/Gと、手動変速機M/Tと、クラッチC/Tとを備えている。エンジンE/Gは、周知の内燃機関の1つであり、例えば、ガソリンを燃料として使用するガソリンエンジン、軽油を燃料として使用するディーゼルエンジンである。エンジンE/Gの出力軸Aeは、フライホイールF/W、及び、クラッチC/Tを介して、手動変速機M/Tの入力軸Aiと接続されている。
手動変速機M/Tは、運転者により操作されるシフトレバーSLのシフト位置に応じて変速段が選択されるトルクコンバータを備えない変速機(所謂、マニュアルトランスミッション)である。手動変速機M/Tは、エンジンE/Gの出力軸Aeから動力が入力される入力軸Aiと、車両の駆動輪へ動力を出力する出力軸Aoとを備える。
手動変速機M/Tは、シフトレバーSLのシフトパターンから理解できるように、複数の走行用変速段(1速〜5速、R)と、ニュートラル段(N)とを備える。走行用変速段としては、前進用の5つの変速段(1速〜5速)、及び後進用の1つの変速段(R)が設けられている。「1速〜5速」および「R」では、入力軸Aiと出力軸Aoとの間で動力伝達系統が確立され、且つ、減速比(出力軸Aoの回転速度に対する入力軸Aiの回転速度の割合)が異なる。手動変速機M/Tは、シフトレバーSLを「1速〜5速」および「R」のうちの何れか1つに対応するシフト位置に移動することにより、対応する走行用変速段が選択・実現されるようになっている。「N」では、入力軸Aiと出力軸Aoとの間で動力伝達系統が確立されない。手動変速機M/Tは、シフトレバーSLを「N」に対応するシフト位置に移動することによりニュートラル段が選択・実現されるようになっている。
クラッチC/Tは、エンジンE/Gの出力軸Aeと手動変速機M/Tの入力軸Aiとの間に介装されている。クラッチC/Tは、手動変速機M/Tの入力軸Aiに一体回転するように設けられた周知の構成の1つを有する摩擦クラッチディスクである。より具体的には、エンジンE/Gの出力軸Aeに一体回転するように設けられたフライホイールF/Wに対して、クラッチC/T(より正確には、クラッチディスク)が互いに向き合うように同軸的に配置されている。
フライホイールF/Wに対するクラッチC/T(より正確には、クラッチディスク)の軸方向の位置が調整可能となっている。クラッチC/Tの軸方向位置が調整されることにより、クラッチトルク(エンジンE/Gの出力軸Aeと手動変速機M/Tの入力軸Aiとの間においてクラッチC/Tが伝達可能な最大トルク)が調整可能となっている。クラッチC/Tの軸方向位置は、車両の運転者により操作されるクラッチペダルCPの操作量に応じて調整される。即ち、上記クラッチトルクは、上記クラッチペダルCPの操作量(位置の調整)に応じて調整される。クラッチトルクとクラッチペダルCPの操作量との関係については、後述する。
また、本装置は、ブレーキ液圧制御装置BRKを備えている。ブレーキ液圧制御装置BRKは、車両の車輪に制動力を与えるブレーキ液圧を発生・消滅させるように設けられた周知の構成の1つを有するアクチュエータである。ブレーキ液圧制御装置BRKは、車両の運転者によるブレーキペダルBPの操作に依存せずに、このブレーキ液圧の発生・消滅が可能となっている。
また、本装置は、クラッチペダルCPの操作量(後述するクラッチストローク)を検出するクラッチ操作量センサP1と、ブレーキペダルBPの操作の有無を検出するブレーキセンサP2と、アクセルペダルAPの操作量(アクセル開度)を検出するアクセル開度センサP3と、シフトレバーSLの位置を検出するシフト位置センサP4と、車両の車速を検出する車速センサP5とを備えている。
更に、本装置は、電子制御ユニットECUを備えている。電子制御ユニットECUは、上述のセンサP1〜P5に基づいて、上述のブレーキ液圧制御装置BRKを制御する。電子制御ユニットECUは、図示しないタイマを備えている。
(クラッチトルクとクラッチペダルCPの操作量との関係)
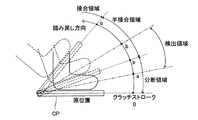
以下、図2、及び図3を参照しながら、クラッチC/Tにおける、クラッチトルクとクラッチペダルCPの操作量との関係について説明する。図2は、クラッチペダルCPが操作される際のクラッチペダルCPの位置移動について説明するための図である。クラッチペダルCPは、車両の運転者の足により踏み込まれることで、踏み込み方向へ移動可能となっている。また、クラッチペダルCPは、踏み込み方向に対抗し付勢力が発生するようになっており、クラッチペダルCPを踏み戻したときには、その付勢力により足と一体的に踏み戻し方向(踏み込み方向とは逆の方向)へ移動可能となっている。
以下、図2、及び図3を参照しながら、クラッチC/Tにおける、クラッチトルクとクラッチペダルCPの操作量との関係について説明する。図2は、クラッチペダルCPが操作される際のクラッチペダルCPの位置移動について説明するための図である。クラッチペダルCPは、車両の運転者の足により踏み込まれることで、踏み込み方向へ移動可能となっている。また、クラッチペダルCPは、踏み込み方向に対抗し付勢力が発生するようになっており、クラッチペダルCPを踏み戻したときには、その付勢力により足と一体的に踏み戻し方向(踏み込み方向とは逆の方向)へ移動可能となっている。
クラッチC/Tの軸方向位置は、クラッチペダルCPの踏み込み方向への操作量が大きいほど、フライホイールF/Wから離間する方向への移動量がより大きくなるよう、例えば、バイ・ワイヤ方式により調整される。クラッチC/T(クラッチディスク)は、クラッチペダルCPの踏み込み方向への操作量が最大であるとき、フライホイールF/Wから最も離れたところに位置するようになっている。
以下、踏み込み方向への操作量が最大であるときの、クラッチペダルCPの位置を「原位置」と呼ぶ。また、クラッチペダルCPの「原位置」からの踏み戻し方向への移動量(操作量)をクラッチストロークと呼ぶ。即ち、クラッチペダルCPが「原位置」にあるとき、クラッチストロークが「0」となる。従って、クラッチストロークが「0」から増大していくと(クラッチペダルCPが「原位置」から踏み戻し方向へ位置移動するよう操作されると)、離間していたクラッチC/T(クラッチディスク)が、フライホイールF/Wに近づいていくようになっている。
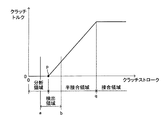
図3は、クラッチトルクとクラッチストロークとの関係を示す図である。クラッチストロークが「0〜p(>0)」の領域では、クラッチトルクが「0」に維持され、エンジンE/Gの出力軸Aeと手動変速機M/Tの入力軸Aiとの間で動力が伝達されない。この領域を「分断領域」と呼ぶ。
クラッチストロークが「p」よりも大きい領域では、クラッチトルクが「0」よりも大きく、エンジンE/Gの出力軸Aeと手動変速機M/Tの入力軸Aiとの間で動力が伝達される。この領域において、クラッチストロークが「p〜q(>p)」の領域では、クラッチトルクはクラッチストロークが大きいほど大きくなる。この領域を「半接合領域」と呼ぶ。クラッチストロークが「q」よりも大きい領域では、クラッチトルクはゼロより大きい所定値(最大値)に維持される。この領域を「接合領域」と呼ぶ。即ち、クラッチストローク「p」に対応するアクセルペダルCPの位置は、クラッチトルクがゼロから増加開始する位置に相当する。
上記「分断領域」における所定のクラッチストローク「a」から、上記「半接合領域」における所定のクラッチストローク「b」までに亘る領域を、「検出領域」と呼ぶ。即ち、クラッチストロークの大きさの関係としては、0<a<p<b<qとなる。この「検出領域」におけるクラッチストロークの両端値(a,b)は、上記「分断領域」および上記「半接合領域」の両領域に亘ってそれぞれ設定される。クラッチストローク「a」,「b」に対応するアクセルペダルCPの位置は、第1,2位置にそれぞれ相当する。この「検出領域」は、後述の坂道発進モードの検出に使用される。
(坂道発進モードの検出)
ところで、車両の坂道発進に際し、操作性向上、及び安全性向上の観点に基づき、坂道発進用ブレーキ液圧制御が実行・開始されるのが好ましい。この制御は、車両の運転者が必要にしているときにのみ実行・開始されることが、特に好適である。このため、本装置では、運転者の操作に基づき「坂道発進モード」が検出される。
ところで、車両の坂道発進に際し、操作性向上、及び安全性向上の観点に基づき、坂道発進用ブレーキ液圧制御が実行・開始されるのが好ましい。この制御は、車両の運転者が必要にしているときにのみ実行・開始されることが、特に好適である。このため、本装置では、運転者の操作に基づき「坂道発進モード」が検出される。
以下、本装置により実行される坂道発進モードを検出する処理の一例について、上述の図2、図4に示すフローチャート、及び図5に示すタイムチャートを参照しながら説明する。
図4に示す例では、坂道発進モード検出処理は、イグニッションON、且つ、坂道発進モードがOFF時にて、所定のタイミング毎に繰り返し実行される。ステップ405では、車両停止か否かが判定される。この判定は、車速センサP5の検出値に基づいて実行される。車両停止(車速が「0」)と検出された場合、ステップ405にて「Yes」と判定されて、ステップ410にて、ブレーキONであるか否かが判定される。この判定は、ブレーキセンサP2の検出値に基づいて実行される。ブレーキペダルBPが制動操作されていると検出された場合、ステップ410にて「Yes」と判定されて、ステップ415にて、手動変速機M/Tの変速段が、走行用変速段(1速〜5速、R)であるか否かが判定される。この判定は、シフト位置センサP4の検出値に基づいて実行される。
手動変速機M/Tの変速段が走行用変速段に選択されていると検出された場合、ステップ415にて「Yes」と判定されて、ステップ420にて、クラッチ戻し操作有か否かが判定される。具体的には、クラッチストロークが、増加しながら「a」を通過した後、上記「検出領域」内に所定時間T維持されたか否かが判定される。この判定は、クラッチ操作量センサP1の検出値と、タイマの測定時間とに基づく。クラッチ戻し操作有と検出された場合、ステップ420にて「Yes」と判定されて、ステップ425にて、上記検出された走行用変速段がリバース(R)であるか否かが判定される。走行用変速段がリバース(R)の場合、「Yes」と判定されてステップ430にて後進用坂道発進制御モードがONとされる。走行用変速段が1速〜5速の場合、「No」と判定されてステップ435にて前進用坂道発進制御モードがONとされる。一方、ステップ405〜420の何れかにおいて「No」と判定された場合には、坂道発進モードはOFFに維持される。
図5に示す例は、傾斜路にて停止している車両が前発進していく場合の作動例である。時刻t1以前では、運転者により、ブレーキペダルBPが制動操作(ブレーキペダルON)されており、シフトレバーSLが「1速」位置に選択されており、クラッチペダルCPが位置が「原位置」となるよう踏み込まれており(クラッチストローク「0」)、車両が停止しているものとする(アクセルペダルAPは操作されていない)。
時刻t1にて、クラッチペダルCPの踏み戻しが開始される。即ち、クラッチペダルCPは原位置から踏み戻し方向へ移動開始し、クラッチストロークが「0」から増加していく(図2を参照)。時刻t2にて、増加するクラッチストロークが「a」を通過する。このとき、クラッチストロークが上記「検出領域」へ到達したことになり、一方で、タイマによる時間計測が開始される。その後、クラッチストロークは、上記「半接合領域」内の「p」よりも若干大きく「b」よりも小さい値に到達し、同値に維持される。即ち、クラッチストロークは、上記「検出領域」内に維持されることになる。
時刻t2から、クラッチストロークが上記「検出領域」内に維持された状態で、時間Tだけ経過する時刻を時刻t3とする。このときまでは、図4のステップ405〜415にて「Yes」と判定されてステップ420に進み、ステップ420にて「No」と判定される。従って、時刻t3以前には、坂道発進モードはOFFに維持されて、坂道発進用ブレーキ液圧制御は実行されない。即ち、ブレーキ液圧制御装置BRKからの制御用ブレーキ液圧が、ゼロに維持される。
時刻t3にて、図4のステップ405〜420にて「Yes」と判定されてステップ425に進み、ステップ425にて「No」と判定された後、前進用坂道発進用モードがONとされる。これにより、坂道発進用ブレーキ液圧制御が開始される。即ち、ブレーキ液圧制御装置BRKからの制御用ブレーキ液圧の発生が開始されて、制御用ブレーキ液圧がゼロから所定値(>0)に向かって増加していく。前進坂道発進用モードがONの期間には、坂道発進用ブレーキ液圧制御の実行が維持される。このため、制御用ブレーキ液圧が、上記所定値に維持される。
時刻t4にて、ブレーキペダルBPの制動操作が解除(ブレーキペダルOFF)される。制御用ブレーキ液圧が上記所定値に維持されているため、運転者により制動操作が解除されているにもかかわらず、車両制動が継続する。即ち、車両が降坂することなく、車両停止状態(車速が「0」である状態)が維持される。
その後、時刻t5にて、アクセルペダルAPの加速操作が開始される。この加速操作が開始された(アクセル開度が「0」から増加した)と判定された場合、坂道発進モードはOFFとされる。この判定は、アクセル開度センサP3の検出値に基づく。時刻t5にて、坂道発進用ブレーキ液圧制御が終了するよう、ブレーキ液圧制御装置BRKからの制御用ブレーキ液圧の消滅が開始されて、制御用ブレーキ液圧がゼロに向かって減少していく。これにより、時刻t5以降、車両が前進していく(車速が「0」から増加していく)。そして、クラッチペダルCPは、より踏み戻し方向へ操作されて、クラッチストロークが増大していく。アクセルペダルAPは、より踏み込み方向へ操作されて、アクセル開度が増大していく。これらに伴い、前進車両の車速の増大が継続する。従って、時刻t5以降、図4のステップ405にて「No」と判定されて、坂道発進モードはOFFに維持される。
(作用・効果)
以上、本装置によれば、坂道発進用ブレーキ液圧制御が、運転者の操作に基づき開始・実行される。具体的には、「車両が停止状態にあり、且つ、ブレーキペダルBPが制動操作されていて、且つ、シフトレバーSLが走行用変速段(1速〜5速、R)のうちの何れか1つに対応するシフト位置にあると判定されている場合」において、クラッチペダルCPの位置が、踏み戻し方向(クラッチトルクの増加方向)に移動しながら、クラッチストロークaに対応する位置を通過した後に、上記「検出領域(クラッチストロークa〜b)」内に所定時間Tに亘って維持されたと判定された場合、坂道発進用ブレーキ液圧制御が開始・実行される。
以上、本装置によれば、坂道発進用ブレーキ液圧制御が、運転者の操作に基づき開始・実行される。具体的には、「車両が停止状態にあり、且つ、ブレーキペダルBPが制動操作されていて、且つ、シフトレバーSLが走行用変速段(1速〜5速、R)のうちの何れか1つに対応するシフト位置にあると判定されている場合」において、クラッチペダルCPの位置が、踏み戻し方向(クラッチトルクの増加方向)に移動しながら、クラッチストロークaに対応する位置を通過した後に、上記「検出領域(クラッチストロークa〜b)」内に所定時間Tに亘って維持されたと判定された場合、坂道発進用ブレーキ液圧制御が開始・実行される。
従って、車両の運転者が坂道発進用ブレーキ液圧制御を必要としているときにのみ、坂道発進用ブレーキ制御が開始・実行され得る。また、坂道発進用ブレーキ液圧制御を開始・実行するにあたり、坂道検出手段(例えば、角度センサ、加速度センサ等)が不要となり得る。
本発明は上記実施形態に限定されることはなく、本発明の範囲内において種々の変形例を採用することができる。例えば、上記実施形態では、上記「検出領域」におけるクラッチストロークの両端値(a,b)が、上記「分断領域」および上記「半接合領域」の両領域に亘ってそれぞれ設定されていたが、これに代えて、例えば、この両端値が、上記「分断領域」のみにそれぞれ設定されてもよいし、上記「半接合領域」のみにそれぞれ設定されてもよい。
M/T…手動変速機、E/G…エンジン、C/T…クラッチ、Ae…エンジンの出力軸、Ai…手動変速機の入力軸、Ao…手動変速機の出力軸、CP…クラッチペダル、BP…ブレーキペダル、SL…シフトレバー、P1…クラッチ操作量センサ、P2…ブレーキセンサ、P4…シフト位置センサ、P5…車速センサ、BRK…ブレーキ液圧制御装置、ECU…電子制御ユニット
Claims (5)
- 車両の運転者により操作されるシフト操作部材(SL)のシフト位置に応じて変速段が選択されるトルクコンバータを備えない手動変速機(M/T)であって、前記車両の動力源(E/G)の出力軸(Ae)から動力が入力される入力軸(Ai)と、前記車両の駆動輪へ動力を出力する出力軸(Ao)と、前記変速機の入力軸(Ai)と前記変速機の出力軸(Ao)との間で動力伝達系統が確立され且つ前記出力軸(Ao)の回転速度に対する前記入力軸(Ai)の回転速度の割合である減速比が異なる複数の走行用変速段(1速〜5速、R)と、前記変速機の入力軸(Ai)と前記変速機の出力軸(Ao)との間で動力伝達系統が確立されないニュートラル段(N)と、を備え、前記シフト操作部材を前記複数の走行用変速段のうちの何れか1つに対応するシフト位置に移動することにより対応する前記走行用変速段が選択・実現され、前記シフト操作部材を前記ニュートラル段に対応するシフト位置に移動することにより前記ニュートラル段が選択・実現されるように構成された手動変速機(M/T)と、
前記動力源の出力軸(Ae)と前記変速機の入力軸(Ai)との間に介装されたクラッチ(C/T)であって、前記車両の運転者により操作されるクラッチ操作部材(CP)の位置の調整によって前記動力源の出力軸(Ae)と前記変速機の入力軸(Ai)との間においてクラッチ(C/T)が伝達可能な最大トルクであるクラッチトルクを調整可能なクラッチ(C/T)と、
前記車両が停止状態にあるか否かを判定する第1判定手段(P5、ECU)と、
前記車両の運転者により操作される制動操作部材(BP)が操作されているか否かを判定する第2判定手段(P2、ECU)と、
前記シフト操作部材(SL)が前記複数の走行用変速段のうちの何れか1つに対応するシフト位置にあるか否かを判定する第3判定手段(P4、ECU)と、
前記車両が停止状態にあり、且つ、前記制動操作部材(BP)が操作されていて、且つ、前記シフト操作部材(SL)が前記複数の走行用変速段のうちの何れか1つに対応するシフト位置にあると判定されている場合において、前記クラッチ操作部材(CP)の位置が前記クラッチトルクの増加方向に移動しながら第1位置(a)を通過したことに基づいて、前記運転者による制動操作部材(BP)の操作に依存せずに前記車両の車輪に制動力を与えるブレーキ液圧を発生する坂道発進用ブレーキ液圧制御を開始・実行する制御手段(BRK、ECU)と、
を備えた、車両の制御装置。 - 請求項1に記載の車両の制御装置において、
前記制御手段は、
前記クラッチ操作部材(CP)の位置が前記第1位置(a)を通過した後、前記クラッチ操作部材(CP)の位置が、前記第1位置と、前記第1位置に対して前記クラッチトルクの増加方向にある第2位置(b)との間に所定時間(T)に亘って維持されたことに基づいて、前記坂道発進用ブレーキ液圧制御を開始・実行するように構成された、車両の制御装置。 - 請求項1又は請求項2に記載の車両の制御装置において、
前記第1位置(a)は、前記クラッチトルクがゼロになる領域内に設定された、車両の制御装置。 - 請求項2又は請求項3に記載の車両の制御装置において、
前記第2位置(b)は、前記クラッチトルクがゼロから増加開始する位置(p)に対して前記クラッチトルクの増加方向の位置に設定された、車両の制御装置。 - 請求項1乃至請求項4の何れか一項に記載の車両の制御装置において、
前記制御手段は、
前記坂道発進用ブレーキ液圧制御の実行中において、前記車両の運転者により操作される加速操作部材(AP)が操作されたことに基づいて、前記坂道発進用ブレーキ液圧制御を終了するように構成された、車両の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012029142A JP2013166399A (ja) | 2012-02-14 | 2012-02-14 | 車両の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012029142A JP2013166399A (ja) | 2012-02-14 | 2012-02-14 | 車両の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013166399A true JP2013166399A (ja) | 2013-08-29 |
Family
ID=49177208
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012029142A Pending JP2013166399A (ja) | 2012-02-14 | 2012-02-14 | 車両の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013166399A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021116705A (ja) * | 2020-01-22 | 2021-08-10 | ダイハツ工業株式会社 | 車両の制御装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10250541A (ja) * | 1997-03-17 | 1998-09-22 | Toyota Autom Loom Works Ltd | ブレーキ液圧制御装置 |
| JP2005048893A (ja) * | 2003-07-30 | 2005-02-24 | Nissan Diesel Motor Co Ltd | クラッチ制御装置 |
| JP2008239034A (ja) * | 2007-03-28 | 2008-10-09 | Hino Motors Ltd | 車両用発進補助装置 |
-
2012
- 2012-02-14 JP JP2012029142A patent/JP2013166399A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10250541A (ja) * | 1997-03-17 | 1998-09-22 | Toyota Autom Loom Works Ltd | ブレーキ液圧制御装置 |
| JP2005048893A (ja) * | 2003-07-30 | 2005-02-24 | Nissan Diesel Motor Co Ltd | クラッチ制御装置 |
| JP2008239034A (ja) * | 2007-03-28 | 2008-10-09 | Hino Motors Ltd | 車両用発進補助装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021116705A (ja) * | 2020-01-22 | 2021-08-10 | ダイハツ工業株式会社 | 車両の制御装置 |
| JP7603375B2 (ja) | 2020-01-22 | 2024-12-20 | ダイハツ工業株式会社 | データ記録装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5096552B2 (ja) | 車両の動力伝達制御装置 | |
| JP5918946B2 (ja) | 車両の動力伝達制御装置 | |
| JP5788082B2 (ja) | 車両の発進制御装置及び発進制御方法 | |
| WO2011104852A1 (ja) | 車両制御システムおよび車両制御方法 | |
| JP5655635B2 (ja) | クリープ車速制御装置 | |
| JP6493455B2 (ja) | 車両の制御装置 | |
| JP2013024281A (ja) | 車両の動力伝達制御装置 | |
| JP5715848B2 (ja) | 車両の動力伝達制御装置 | |
| JP2013155631A (ja) | 運転支援装置 | |
| JP5185994B2 (ja) | 車両の動力伝達制御装置 | |
| JP4329695B2 (ja) | 制動装置の制御装置 | |
| JP7184456B2 (ja) | 運転補助装置付き車両の走行制御装置 | |
| JP5256913B2 (ja) | アクセルペダル踏力制御装置 | |
| JP5856778B2 (ja) | 動力伝達装置の制御装置 | |
| JP2013166399A (ja) | 車両の制御装置 | |
| JP2013053727A (ja) | 車両の動力伝達制御装置 | |
| JP2008213648A (ja) | オートマティック車両用制御装置 | |
| US9031751B2 (en) | Device for controlling automatic transmission | |
| JP5462103B2 (ja) | 惰行制御装置 | |
| JP6434262B2 (ja) | 車両制御装置、及びその制御方法 | |
| JP6919457B2 (ja) | 車両制御装置 | |
| JP4066936B2 (ja) | 車両用エンジン出力制御装置 | |
| JP2017048876A (ja) | 車両のニュートラル制御装置 | |
| JP6287874B2 (ja) | 車両制御装置 | |
| KR101478988B1 (ko) | 클러치 제어 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160202 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160727 |