JP2012505016A - 心臓支援デバイス、システム、および方法 - Google Patents
心臓支援デバイス、システム、および方法 Download PDFInfo
- Publication number
- JP2012505016A JP2012505016A JP2011530988A JP2011530988A JP2012505016A JP 2012505016 A JP2012505016 A JP 2012505016A JP 2011530988 A JP2011530988 A JP 2011530988A JP 2011530988 A JP2011530988 A JP 2011530988A JP 2012505016 A JP2012505016 A JP 2012505016A
- Authority
- JP
- Japan
- Prior art keywords
- energy
- heart
- implantable
- patient
- implantable device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






























































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/10—Location thereof with respect to the patient's body
- A61M60/122—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body
- A61M60/165—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable in, on, or around the heart
- A61M60/191—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable in, on, or around the heart mechanically acting upon the outside of the patient's native heart, e.g. compressive structures placed around the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/20—Type thereof
- A61M60/289—Devices for mechanical circulatory actuation assisting the residual heart function by means mechanically acting upon the patient's native heart or blood vessel structure, e.g. direct cardiac compression [DCC] devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/40—Details relating to driving
- A61M60/465—Details relating to driving for devices for mechanical circulatory actuation
- A61M60/47—Details relating to driving for devices for mechanical circulatory actuation the force acting on the actuation means being mechanical, e.g. mechanically driven members clamping a blood vessel
- A61M60/473—Details relating to driving for devices for mechanical circulatory actuation the force acting on the actuation means being mechanical, e.g. mechanically driven members clamping a blood vessel generated by an electromotor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/40—Details relating to driving
- A61M60/465—Details relating to driving for devices for mechanical circulatory actuation
- A61M60/489—Details relating to driving for devices for mechanical circulatory actuation the force acting on the actuation means being magnetic
- A61M60/495—Electromagnetic force
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/80—Constructional details other than related to driving
- A61M60/855—Constructional details other than related to driving of implantable pumps or pumping devices
- A61M60/861—Connections or anchorings for connecting or anchoring pumps or pumping devices to parts of the patient's body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/80—Constructional details other than related to driving
- A61M60/855—Constructional details other than related to driving of implantable pumps or pumping devices
- A61M60/865—Devices for guiding or inserting pumps or pumping devices into the patient's body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/80—Constructional details other than related to driving
- A61M60/855—Constructional details other than related to driving of implantable pumps or pumping devices
- A61M60/871—Energy supply devices; Converters therefor
- A61M60/873—Energy supply devices; Converters therefor specially adapted for wireless or transcutaneous energy transfer [TET], e.g. inductive charging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/80—Constructional details other than related to driving
- A61M60/855—Constructional details other than related to driving of implantable pumps or pumping devices
- A61M60/871—Energy supply devices; Converters therefor
- A61M60/882—Devices powered by the patient, e.g. skeletal muscle powered devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/32—General characteristics of the apparatus with radio-opaque indicia
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3303—Using a biosensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/82—Internal energy supply devices
- A61M2205/8237—Charging means
- A61M2205/8243—Charging means by induction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/10—Location thereof with respect to the patient's body
- A61M60/122—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body
- A61M60/126—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable via, into, inside, in line, branching on, or around a blood vessel
- A61M60/148—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable via, into, inside, in line, branching on, or around a blood vessel in line with a blood vessel using resection or like techniques, e.g. permanent endovascular heart assist devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/10—Location thereof with respect to the patient's body
- A61M60/122—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body
- A61M60/165—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable in, on, or around the heart
- A61M60/178—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body implantable in, on, or around the heart drawing blood from a ventricle and returning the blood to the arterial system via a cannula external to the ventricle, e.g. left or right ventricular assist devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/10—Location thereof with respect to the patient's body
- A61M60/122—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body
- A61M60/196—Implantable pumps or pumping devices, i.e. the blood being pumped inside the patient's body replacing the entire heart, e.g. total artificial hearts [TAH]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/20—Type thereof
- A61M60/205—Non-positive displacement blood pumps
- A61M60/216—Non-positive displacement blood pumps including a rotating member acting on the blood, e.g. impeller
- A61M60/226—Non-positive displacement blood pumps including a rotating member acting on the blood, e.g. impeller the blood flow through the rotating member having mainly radial components
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/20—Type thereof
- A61M60/247—Positive displacement blood pumps
- A61M60/253—Positive displacement blood pumps including a displacement member directly acting on the blood
- A61M60/258—Piston pumps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/20—Type thereof
- A61M60/247—Positive displacement blood pumps
- A61M60/253—Positive displacement blood pumps including a displacement member directly acting on the blood
- A61M60/268—Positive displacement blood pumps including a displacement member directly acting on the blood the displacement member being flexible, e.g. membranes, diaphragms or bladders
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/40—Details relating to driving
- A61M60/403—Details relating to driving for non-positive displacement blood pumps
- A61M60/422—Details relating to driving for non-positive displacement blood pumps the force acting on the blood contacting member being electromagnetic, e.g. using canned motor pumps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/40—Details relating to driving
- A61M60/424—Details relating to driving for positive displacement blood pumps
- A61M60/457—Details relating to driving for positive displacement blood pumps the force acting on the blood contacting member being magnetic
- A61M60/462—Electromagnetic force
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/50—Details relating to control
- A61M60/508—Electronic control means, e.g. for feedback regulation
- A61M60/515—Regulation using real-time patient data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/50—Details relating to control
- A61M60/508—Electronic control means, e.g. for feedback regulation
- A61M60/515—Regulation using real-time patient data
- A61M60/523—Regulation using real-time patient data using blood flow data, e.g. from blood flow transducers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/50—Details relating to control
- A61M60/508—Electronic control means, e.g. for feedback regulation
- A61M60/515—Regulation using real-time patient data
- A61M60/531—Regulation using real-time patient data using blood pressure data, e.g. from blood pressure sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M60/00—Blood pumps; Devices for mechanical circulatory actuation; Balloon pumps for circulatory assistance
- A61M60/80—Constructional details other than related to driving
- A61M60/855—Constructional details other than related to driving of implantable pumps or pumping devices
- A61M60/871—Energy supply devices; Converters therefor
- A61M60/876—Implantable batteries
Abstract
Description
体内制御ユニットと、
心臓の生理学的な電気パルスまたは筋肉収縮を感知するセンサとを備え、
前記制御ユニットが、感知された情報に従って前記心臓補助デバイスを制御することが好ましい。
− 針または管状の計器を患者の身体の胸部内に挿入するステップと、
− 針または管状の計器を使用して胸部に気体を充填し、それによって胸腔を膨張させるステップと、
− 少なくとも2つの腹腔鏡トロカールを患者の体内に配置するステップと、
− 腹腔鏡トロカールの1つを通して胸部内にカメラを挿入するステップと、
− 前記少なくとも2つの腹腔鏡トロカールの1つを通して少なくとも1つの切開器具を挿入し、患者の心臓の所期の配置領域を切開するステップと、
− 胸部内の配置領域内に心臓補助デバイスを1つまたは複数の部分として配置するステップとを含み、このステップが、
− 血流に影響を及ぼす心臓接触器官を配置するステップと、
− 心臓接触器官によって使用される動力学的運動を生じさせる駆動ユニットを配置するステップと、
− 固定デバイスを人骨に安定した位置で取り付けて、前記駆動ユニットおよび動力学的運動が必要な抗力を得られるようにするステップと、
− 安定した骨の位置に対して心臓の呼吸運動を補償する呼吸運動補償器を配置するステップと、
− 心臓補助デバイスに動力供給する埋込まれたエネルギー受信器または体内エネルギー源を配置して接続し、それによって、
心臓を少なくとも部分的に圧迫する方法ステップ、および心臓補助デバイスを少なくとも部分的に弛緩させる方法ステップの少なくとも1つを実行して、心臓のポンプ機構をその外側から支持するステップとを含む。
− 患者の皮膚を切るステップと、
− 胸腔を開くステップと、
− 心臓に対して内側に心臓補助デバイスを配置する配置領域を切開するステップと、
− 胸部内の配置領域内に心臓補助デバイスを1つまたは複数の部分として配置するステップとを含み、このステップが、
− 血流に影響を及ぼす心臓接触器官を配置するステップと、
− 心臓接触器官によって使用される動力学的運動を生じさせる駆動ユニットを配置するステップと、
− 固定デバイスを人骨に安定した位置で取り付けて、前記駆動ユニットおよび動力学的運動が必要な抗力を得られるようにするステップと、
− 安定した骨の位置に対して心臓の呼吸運動を補償する呼吸運動補償器を配置するステップと、
− 心臓補助デバイスに動力供給する埋込まれたエネルギー受信器または体内エネルギー源を配置して接続し、それによって、
心臓を少なくとも部分的に圧迫する方法ステップ、および心臓補助デバイスを少なくとも部分的に弛緩させる方法ステップの少なくとも1つを実行して、心臓のポンプ機構をその外側から支持するステップとを含む。
− 針または管状の計器を患者の身体の腹部内に挿入するステップと、
− 針または管状の計器を使用して腹部に気体を充填し、それによって腹腔を膨張させるステップと、
− 少なくとも2つの腹腔鏡トロカールを患者の腹部内に配置するステップと、
− 腹腔鏡トロカールの1つを通して腹部内にカメラを挿入するステップと、
− 前記少なくとも2つの腹腔鏡トロカールの1つを通して少なくとも1つの切開器具を挿入するステップと、
− 隔膜筋内を切開して開口を生じさせるステップと、
− 前記開口を通して患者の心臓の所期の配置領域を切開するステップと、
− 胸部内の配置領域内に心臓補助デバイスを1つまたは複数の部分として配置するステップとを含み、このステップが、
− 血流に影響を及ぼす心臓接触器官を配置するステップと、
− 心臓接触器官によって使用される動力学的運動を生じさせる駆動ユニットを配置するステップと、
− 固定デバイスを人骨に安定した位置で取り付けて、前記駆動ユニットおよび動力学的運動が必要な抗力を得られるようにするステップと、
− 安定した骨の位置に対して心臓の呼吸運動を補償する呼吸運動補償器を配置するステップと、
− 心臓補助デバイスに動力供給する埋込まれたエネルギー受信器または体内エネルギー源を配置して接続し、それによって、
心臓を少なくとも部分的に圧迫する方法ステップ、および心臓補助デバイスを少なくとも部分的に弛緩させる方法ステップの少なくとも1つを実行して、心臓のポンプ機構をその外側から支持するステップとを含む。
− 患者の皮膚を切るステップと、
− 腹腔を開くステップと、
− 隔膜筋内を切開して開口を生じさせるステップと、
− 前記開口を通して心臓補助デバイスを配置する配置領域を切開するステップと、
− 胸部内の配置領域内に心臓補助デバイスを1つまたは複数の部分として配置するステップとを含み、このステップが、
− 血流に影響を及ぼす心臓接触器官を配置するステップと、
− 心臓接触器官によって使用される動力学的運動を生じさせる駆動ユニットを配置するステップと、
− 固定デバイスを人骨に安定した位置で取り付けて、前記駆動ユニットおよび動力学的運動が必要な抗力を得られるようにするステップと、
− 安定した骨の位置に対して心臓の呼吸運動を補償する呼吸運動補償器を配置するステップと、
− 心臓補助デバイスに動力供給する埋込まれたエネルギー受信器または体内エネルギー源を配置して接続し、それによって、
心臓を少なくとも部分的に圧迫する方法ステップ、および心臓補助デバイスを少なくとも部分的に弛緩させる方法ステップの少なくとも1つを実行して、心臓のポンプ機構をその外側から支持するステップとを含む。
− 前記駆動ユニットから前記心臓補助デバイスへ運動力を供給し、前記心臓接触器官の運動を引き起こすステップをさらに含むことができる。
− 駆動ユニットを、前記駆動ユニットに動力供給する埋込み可能なエネルギー受信器または体内エネルギー源と接続するステップをさらに含むことができる。
− 前記固定子および回転子を腹部または胸部内に配置するステップであって、前記回転子が前記心臓補助デバイスに接続する、ステップと、
− 前記固定子へエネルギーを供給して前記回転子を回転させ、それによって前記心臓補助デバイスへ運動エネルギーを輸送するステップとをさらに含む。
− 心臓補助デバイスまたは駆動ユニットに接続された電線を、心臓の右心房内へ、さらに静脈血管システム内をさかのぼって切開して配置するステップと、
− 鎖骨下静脈、頚静脈、または上腕静脈内など、皮下領域内または皮下領域のより近くで血管システムから出るステップと、
− 皮下領域内もしくはその付近に、または胸部もしくは腹部内に体内エネルギー源を配置するステップと、
− 患者の皮膚を貫通しないで、体外エネルギー源からエネルギーを非侵襲的に供給し、体内エネルギー源に動力供給して心臓補助デバイスまたは駆動ユニットに間接的または直接的に動力供給するステップとをさらに含む。
− 心臓の右心房または右心室内に電極を配置するステップと、
− 心臓の右心房を介して電極へ、さらに静脈血管システム内をさかのぼって電線を配置するステップと、
− 鎖骨下静脈、頚静脈、または上腕静脈内など、皮下領域内または皮下領域のより近くで血管システムから出るステップと、
− 皮下領域内もしくはその付近に、または胸部もしくは腹部内に体内制御ユニットを配置するステップとをさらに含むことができ、この方法が、
− 心臓収縮を制御する前記電極からのエネルギー・パルスを伝送するステップ、および
− 心臓補助デバイスまたは駆動ユニットを連係して働かせるステップの少なくとも1つをさらに含む。
− 心臓の右心房または右心室内に電極を配置するステップと、
− 心臓の右心房を介して電極へ、さらに静脈血管システム内をさかのぼって電線を配置するステップと、
− 鎖骨下静脈、頚静脈、または上腕静脈内など、皮下領域内または皮下領域のより近くで血管システムから出るステップと、
− 皮下領域内もしくはその付近に、または胸部もしくは腹部内に体内制御ユニットを配置するステップとをさらに含み、この方法が、
− 心臓の電気パルスまたは筋肉収縮に関連するセンサ入力を受け取るステップ、および
− 前記センサ入力に基づいて心臓補助デバイスまたは駆動ユニットを連係して働かせるステップの少なくとも1つをさらに含む。
図81では、記号Y1、Y2、Y3などは回路内の試験点を表す。図中のこれらの構成要素およびそれぞれの値はこの特定の実装形態で機能する値であり、これはもちろん、無数の可能な設計の解決策の1つにすぎない。
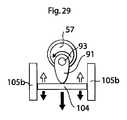
91 駆動部材; 57 動作デバイス; 244 接続アーム;
241 固定部材; 240 人体構成骨。
Claims (123)
- 心臓の筋肉に外力をかけることによってヒト患者の心臓のポンプ機能を改善する埋込み可能なデバイスであって、
心臓収縮に続いて周期的に心臓の筋肉に力を作用させて心臓の筋肉に力をかける少なくとも1つの心臓接触器官を備え、
埋込み可能なデバイスは、前記接触器官によって心臓に作用する力の位置を変更できるように適合され、患者に埋込まれた後においては力の作用する領域を心臓の第1の領域から心臓の第2の領域へと変更することが可能となる、
ことを特徴とする埋込み可能なデバイス。 - 心臓接触器官は、少なくとも1つの液圧クッションまたは少なくとも1つの空気圧クッションを備える、請求項1に記載の埋込み可能なデバイス。
- プレートを含み、そのプレート上に少なくとも1つの液圧のまたは空気圧のクッションが配置され、そのプレートは、液圧のまたは空気圧のクッションの位置を変更できるように適合され、それにより、埋込み可能なデバイスがヒト患者内に埋込まれた後においては、ヒト患者の心臓に作用する力の位置を変更し得る、請求項2に記載の埋込み可能なデバイス。
- プレートを含み、そのプレート上に少なくとも1つの液圧のまたは空気圧のクッションが配置され、そのプレートは、プレートに対するクッションの位置を変更して液圧のまたは空気圧のクッションの位置を変更できるように適合され、それにより、埋込み可能なデバイスがヒト患者内に埋込まれた後においては、ヒト患者の心臓に作用する力の位置を変更し得る、請求項2に記載の埋込み可能なデバイス。
- 少なくとも第1および第2のクッションを含み、第1のクッションは第1の容積の第1のチャンバを含み、第2のクッションは第2の容積の第2のチャンバを含み、第1および第2の容積は、埋込み可能なデバイスがヒト患者内に埋込まれた後においては、ヒト患者の心臓に作用する力に影響を及ぼすように個々に変化できるように適合されている、請求項2、3、または4に記載の埋込み可能なデバイス。
- 心臓に作用する力の位置は、所定数の心拍の後で変更される、請求項1〜4の何れか1項に記載の埋込み可能なデバイス。
- 心臓に作用する力の位置は、所定時間後に変更される、請求項1〜4の何れか1項に記載の埋込み可能なデバイス。
- 心臓に作用する力の位置は、センサからの信号受信の後に変更される、請求項1〜4の何れか1項に記載の埋込み可能なデバイス。
- 少なくとも第1および第2のピストンを備え、第1のピストンは第2のピストンと関連して動き得るようにされ、埋込み可能なデバイスがヒト患者内に埋込まれた後においては、前記ヒト患者の前記心臓に作用する前記力に影響を及ぼすよう変化できるように適合されている、請求項1に記載の埋込み可能なデバイス。
- 少なくとも1つの動作する結合部を含み、その結合部の動作によって、心臓接触器官から心臓に作用する力の位置が、変更される、請求項1に記載の埋込み可能なデバイス。
- 少なくとも第1および第2の動作する結合部を含み、それらの第1および第2の結合部の動作によって、心臓接触器官から心臓に作用する力の位置が、変更される、請求項1に記載の埋込み可能なデバイス。
- 少なくとも第1、第2および第3の動作する結合部を含み、それらの第1、第2および第3の結合部の動作によって、心臓接触器官から心臓に作用する力の位置が、変更される、請求項1に記載の埋込み可能なデバイス。
- 前記結合部は、動作する並進ジョイントまたは枢動ジョイントである、請求項10、11、または12に記載の埋込み可能なデバイス。
- 心臓の組織壁の少なくとも一部分を、心臓接触器官によって圧迫するように適合され、心臓の前記組織壁の少なくとも一部分を刺激して前記組織壁をさらに圧迫するようにさらに適合されている、請求項1〜13の何れか1項に記載の埋込み可能なデバイス。
- 心臓の組織壁の刺激は、電気的刺激を使用して実行することができる、請求項14に記載の埋込み可能なデバイス。
- 少なくとも1つ心臓接触器官は、機械的に作動させられる心臓接触器官である、請求項1に記載の埋込み可能なデバイス。
- 前記プレートは、動く動作デバイスを含む、請求項3または4に記載の埋込み可能なデバイス。
- 前記動作デバイスは、電気的に付勢されている、請求項17に記載の埋込み可能なデバイス。
- 前記動作デバイスは、液圧で付勢されている、請求項17に記載の埋込み可能なデバイス。
- 前記動作デバイスは、空気圧で付勢されている、請求項17に記載の埋込み可能なデバイス。
- 少なくとも1つの液圧または空気圧のクッションは、容積を持つチャンバを含み、その容積は、埋込み可能なデバイスがヒト患者内に埋込まれた後においては、ヒト患者の心臓に作用する力に及ぼす影響を変化させる、請求項2に記載の埋込み可能なデバイス。
- 前記容積は、液圧システムに流体接続されている、請求項21に記載の埋込み可能なデバイス。
- 液圧システムに流体接続されているチャンバの容積を変化させる注入ポートが含まれている、請求項22に記載の埋込み可能なデバイス。
- 容積をそれぞれ有する複数のクッションを備え、それら複数の容積は、埋込み可能なデバイスがヒト患者内に埋込まれた後においては、ヒト患者の心臓に作用する力に影響を及ぼすように個々に変化できるように適合されている、請求項2に記載の埋込み可能なデバイス。
- 複数の容積に流体接続された液圧システムを備える、請求項24に記載の埋込み可能なデバイス。
- 液圧システムは、チャンバの容積を個々に変化させる複数の注入ポートを備える、請求項25に記載の埋込み可能なデバイス。
- 液圧システムは、注入ポート・ユニットを備え、その注入ポート・ユニットにはチャンバの容積を個々に変化させる複数の注入ポートが含まれている、請求項26に記載の埋込み可能なデバイス。
- 液圧システムを備える、請求項2に記載の埋込み可能なデバイス。
- 少なくとも1つのクッションの容積は、液圧システムを用いて液圧流体をクッションへまたはクッションから移動させることによって変化させられる、請求項28に記載の埋込み可能なデバイス。
- 空気圧システムを備える、請求項2に記載の埋込み可能なデバイス。
- 少なくとも1つのクッションの容積は、空気圧システムを用いてガス流体をクッションへまたはクッションから移動させることによって変化させられる、請求項30に記載の埋込み可能なデバイス。
- 少なくとも1つの心臓接触器官は、心臓の筋肉に接触し得る少なくとも1つのピストンを含む、請求項1に記載の埋込み可能なデバイス。
- 少なくとも1つのピストンには、それを動かすための少なくとも1つの液圧駆動ユニットが備えられる、請求項32に記載の埋込み可能なデバイス。
- 少なくとも1つのピストンには、それを動かすための少なくとも1つの機械的駆動ユニットが備えられる、請求項32に記載の埋込み可能なデバイス。
- 少なくとも1つのピストンには、それを動かすための少なくとも1つの空気圧駆動ユニットが備えられる、請求項32に記載の埋込み可能なデバイス。
- 少なくとも1つのピストンは、少なくとも部分的にスリーブ内に置かれている、請求項32、33,34,まはた、35に記載の埋込み可能なデバイス。
- 前記少なくとも1つのピストンはプレートに配置され、そのプレートは、埋込み可能なデバイスがヒト患者内に埋込まれた後においては、ヒト患者の心臓に作用する力の位置を変更し得る、請求項32、33、34、または35に記載の埋込み可能なデバイス。
- 前記プレートは、作動デバイスを用いて動かされる、請求項37に記載の埋込み可能なデバイス。
- 前記プレートは心拍ごとに動かされ、心筋の収縮に続いて、少なくとも1つの動く前記ピストンに短い行程が可能とされて心筋の運動に影響を及ぼす、請求項38に記載の埋込み可能なデバイス。
- 前記作動デバイスは、電気的、液圧的または空気圧的に動作するデバイスである、請求項38に記載の埋込み可能なデバイス。
- 3つ以上のピストンを含み、すべてのピストンが個々に動いて心筋に作用する力に影響を及ぼすよう適合され、前記力の位置が変更される、請求項1に記載の埋込み可能なデバイス。
- 心臓に作用する力の位置の変更を、非侵襲的に患者の外側から、行えるよう適合されている、請求項41に記載の埋込み可能なデバイス。
- 流体のレベルの較正用の注入ポートを備える、請求項1に記載の埋込み可能なデバイス。
- 並進ジョイントは電気的に動作するジョイントである、請求項12に記載の埋込み可能なデバイス。
- 電気的に動作する並進ジョイントは、電気的に動作するリニアモータを用いるものである、請求項44に記載の埋込み可能なデバイス。
- 枢動ジョイントは電気的に動作するジョイントである、請求項12に記載の埋込み可能なデバイス。
- 電気的に動作する枢動ジョイントは、電気的に動作するモータを用いるものである、請求項46に記載の埋込み可能なデバイス。
- 前記結合部は、液圧的または空気圧的に動作する、請求項12に記載の埋込み可能なデバイス。
- 身体の骨を含む領域への埋込み可能なデバイスの固定を助ける固定要素をさらに含む、請求項1に記載の埋込み可能なデバイス。
- 身体の骨を含む前記領域は、胸骨、少なくとも1本の肋骨、および、少なくとも1つの脊椎骨から選択される、請求項49に記載の埋込み可能なデバイス。
- セラミック材料、チタン、ステンレス鋼、シリコーンを主成分とする材料、フッ素重合体から選択される材料から成る、請求項1に記載の埋込み可能なデバイス。
- 心臓接触器官が左室に外力を作用させる、請求項1に記載の埋込み可能なデバイス。
- 心臓接触器官が左心室の2つの異なる側面に外力を作用させる、請求項1に記載の埋込み可能なデバイス。
- 心臓接触器官が右心室に外力を作用させる、請求項1に記載の埋込み可能なデバイス。
- 心臓接触器官が右心室の2つの異なる側面の外力を作用させる、請求項1に記載の埋込み可能デバイス。
- 心筋に外力を作用させることによって患者の心臓のポンプ機能を高める方法であって、
心臓接触器官を、患者に埋込まれた後において、力を作用させる心臓の領域を非侵襲的に変えるように動かし、
埋込み可能デバイスを、それの心臓接触器官からヒト患者の心臓に力が作用するように、用いる、
ポンプ機能を高める方法。 - 心筋に外力を作用させることによって患者の心臓のポンプ機能を高めるため、埋込み可能なデバイスの外科的な配置を、腹腔鏡による胸部へのアプローチを介して実行する方法であって、前記埋込み可能なデバイスには少なくとも1つの心臓接触器官が含まれ、その心臓接触器官は、当該埋込み可能なデバイスが患者に埋込まれた後においては、力を作用させる心臓の領域を変えられるように適合されており、
− 患者の胸部への針または管のような器具を挿入し、
− その針または管のような器具を用いて、胸腔を拡大してガスで満たし、
− 少なくとも2つの腹腔鏡トラカールを患者の身体内に配置し、
− 腹腔鏡トラカールの1つを介して胸腔へカメラを挿入し、
− 腹腔鏡トラカールの別の1つを介して切開器具を挿入し、患者の心臓おける意図した配置領域を切開し、
− 患者の心臓に心臓接触器官を配置し、
− 動作デバイスを、患者の胸骨,肋骨または脊椎骨に結合させて配置し、その動作デバイスは、心臓接触器官を作動させて心臓に外側から力が周期的に作用さられ得るようになし、
− 心臓のポンプ機能を高めるため前記埋込み可能デバイスを駆動するエネルギー源に接続し、
− 心臓接触器官の位置の調整をする、
ことを特徴とする方法。 - 調整が非侵襲的に身体の外側から実行される、請求項57に記載の方法。
- 心筋に外力を作用させることによって患者の心臓のポンプ機能を高めるため、埋込み可能なデバイスの外科的な配置を、腹腔鏡による胸部へのアプローチを介して実行する方法であって、前記埋込み可能なデバイスには少なくとも1つの心臓接触器官が含まれ、その心臓接触器官は、当該埋込み可能なデバイスが患者に埋込まれた後においては、力を作用させる心臓の領域を変えられるように適合されており、
− 皮膚を切り、胸部を切開し、
− 患者の心臓おける意図した配置領域を切開し、
− 患者の心臓に心臓接触器官を配置し、
− 胸骨または肋骨または脊椎に結合させて動作デバイスを、心臓接触器官を作動させて心臓に外側から力が周期的に作用させられ得るように配置し、
− 心臓のポンプ機能を高めるため前記埋込み可能デバイスを駆動するエネルギー源に接続し、
− 心臓接触器官の位置の調整をする、
ことを特徴とする方法。 - 調整が非侵襲的に身体の外側から実行される、請求項59に記載の方法。
- 請求項1に記載の埋込み可能デバイスを備えて成る、システム。
- 手動で、非侵襲的にデバイスを制御する、埋込み可能な少なくとも一つのスイッチを備えて成る、請求項61に記載のシステム。
- デバイスが手動で流体リザーバを押圧することによって非侵襲的に調整されるのに適している、液圧接続されている、埋込み可能な流体リザーバを有する液圧デバイスを含む、請求項61に記載のシステム。
- 非侵襲的に装置を制御するため、電波式遠隔操作から成る請求項61に記載のシステム。
- 電波式遠隔操作は、少なくとも一つの外部信号送信機および/またはレシーバから成り、外部信号送信機によって送られる信号を受信するかまたは外部信号受信器に信号を送るための患者において埋込み可能な内部信号受信器および/または送信器から成る、請求項64に記載のシステム。
- 電波式遠隔操作が装置を制御するため、少なくとも一つの無線制御信号を送信する、請求項64に記載のシステム。
- 無線制御信号は、周波数の振幅または位相変調信号またはそれらの組み合わせから成る、請求項66に記載のシステム。
- 電波式遠隔操作が制御信号を担持するための電磁石の搬送波信号を送る、請求項66に記載のシステム。
- 無線エネルギーを有するデバイスの非侵襲的にエネルギーを与えている埋込み可能なエネルギーを消費している構成要素のための無線エネルギー伝動装置から成っている、請求項64に記載のシステム。
- 無線エネルギーが音波信号、超音波信号、電磁波信号、赤外線の光情報、可視光情報、紫外線光情報、レーザー光情報、マイクロ波信号、電波信号、X線放射信号およびγ線のような波信号から成る、請求項69に記載のシステム。
- 無線エネルギーが、電界、磁場、複合起電物体および磁場のうちの一つから成る請求項69に記載のシステム。
- 制御信号が、電界、磁場、複合起電物体および磁場のうちの一つから成る請求項66に記載のシステム。
- 信号がアナログ信号または類似体およびデジタル信号の組合せから成る、請求項66または70に記載のシステム。
- 装置の埋込み可能なエネルギーを消費しているコンポーネントを駆動するための埋込み可能な内部エネルギー源から成っている請求項61に記載のシステム。
- 内部エネルギー源が無線モードで移される外部のエネルギー源を含んでいる、請求項74に記載のシステム。
- 内部エネルギー源に託すためのエネルギー伝達およびその外側に内部からフィードバック情報に患者のボディを送信するためのフィードバック・デバイスに相関し、フィードバックの情報がセンサによって検出され、測定器で測定される関数パラメタに関する、関数パラメタを検出しているかまたは測定しているセンサまたは測定器から成る請求項75に記載のシステム。
- 外側、患者の物理パラメータのうちの少なくとも一つに関しているフィードバック情報およびデバイスに関連した関数パラメタに内部からフィードバックし、患者のボディを送信するためのフィードバック・デバイスから成っている、請求項74に記載のシステム。
- センサによって検出される患者の物理パラメータのうちの少なくとも一つに関している情報に応答してデバイスを制御するためのセンサおよび/または測定器および埋込み可能な内部制御装置から更に成っているかまたはセンサによって検出されるかまたは測定器で測定されるデバイスに関連した測定器および関数パラメタで測定される請求項74に記載のシステム。
- 物理パラメータが圧力または運動性運動である、請求項78に記載のシステム。
- 外部データ伝達者 内部伝達者が外部データ伝達者にデバイスまたは患者に関連したデータを供給し/または外部データ伝達者が内部データ伝達者にデータを供給し、通信している外部データ・コミュニケータおよび埋込み可能な内部データ伝達者から成っている請求項74に記載のシステム。
- モーターまたは装置を作動するためのポンプから成る請求項74に記載のシステム。
- 装置を作動するための油圧早巻き装置から成っている請求項74に記載のシステム。
- 装置を作動するための早巻き装置から成っていて、早巻き装置がその代わりに装置を作動するために必要とされる力を減少させるように設計されたサーボから成る決定された動きのための時間を増加させている請求項74に記載のシステム。
- 無線エネルギーがデバイスの動作のための運動のエネルギーを作成するために直接早巻き装置に電力を供給するためにその無線状態において使われる、エネルギー-伝動装置によって送信されている請求項69に記載のシステム。
- エネルギーに表版からエネルギー伝達装置によって伝動される無線エネルギーを変換するためのエネルギーを変換させている装置から成っている請求項69に記載のシステム。
- 第2の形エネルギーにエネルギー伝達装置によって伝動されるエネルギーを変換する、エネルギー変換デバイスが直接第2の形エネルギーを有する装置の埋込み可能なエネルギーを消費しているコンポーネントを駆動するの請求項85に記載のシステム。
- 第2の形エネルギーが直流、拍動性の直流および交流のうちの少なくとも1つから成る、請求項85に記載のシステム。
- 第2の形エネルギーが蓄電池に充電するために少なくとも部分的にも使われる、請求項85に記載のシステム。
- 第2の形に、以下の内少なくとも一つの磁気エネルギー、運動のエネルギー、音響エネルギー、化学エネルギー、放射エネルギー、電磁エネルギー、写真エネルギー、核エネルギー熱エネルギー、非磁性エネルギー、非運動のエネルギー、非化学エネルギー、非音のエネルギー、非核エネルギーおよび非熱エネルギーから成る、請求項85に記載のシステム。
- 少なくとも一つの電圧レベル・ガードおよび/または少なくとも一つの定電流ガードを含む埋込み可能な電気部品から成る請求項74に記載のシステム。
- 固有エネルギー・レシーバによって受け取られるエネルギーおよび判定デバイスで測定されるエネルギー収支に基づく、制御装置が外部エネルギー-伝動装置から無線エネルギーの伝達を制御するデバイスの構成要素を消費している埋込み可能なエネルギーのために使用するエネルギーとの間にエネルギー収支を決定するのに適している判定デバイスから成り、エネルギー伝動装置から無線エネルギーの伝達を制御するための制御装置およびそれに対して送信された無線エネルギー、直接デバイスの消費する構成要素を埋込み可能なエネルギーに接続している固有エネルギー・レシーバまたは間接的に調達受信エネルギを受信するための埋込み可能な固有エネルギー・レシーバから成っている請求項69に記載のシステム。
- 判定装置がエネルギー収支の変化を検出するのに適していて、制御装置によるシステムは、検出エネルギー収支変化に基づいて無線エネルギーの伝達を制御する、請求項91に記載のシステム。
- 判定デバイスが固有エネルギー・レシーバによって受け取られるエネルギーおよびデバイスの構成要素を消費している埋込み可能なエネルギーのために使用するエネルギーの違いを検出するのに適していて、制御装置によるシステムは、検出エネルギー差に基づいて無線エネルギーの伝達を制御する、請求項91に記載のシステム。
- エネルギー伝動装置が人体に外部的に配置されるコイルから成り、電気回路は送信された無線エネルギーの電源を変化させるために電気パルスの連続したトレーリングおよび前縁との間に連続してリードすることおよび後縁間の第1の時間的間隔および/または第2の時間的間隔を変化させるために適応した、エネルギー・レシーバが様々な電源を有し、送信された無線エネルギーを受信する、内部的に、無線エネルギー、リードを有する電気パルスおよび後縁を送信するために電気パルスを有する外部コイルを駆動するために接続される人体および電気回路に置かれるために埋込み可能なエネルギー・レシーバから成る、請求項69に記載のシステム。
- 電気回路が第1のまたは第2の時間的間隔を変化させることを除いて不変のままであるために、電気パルスを分配するのに適している、請求項94に記載のシステム。
- 電気回路は時定数を有して、第1の時定数だけの範囲の第1および第2の時間的間隔を変化させるのに適していて、第1のまたは第2の時間的間隔の長さが多様なときに、コイルの上の送信パワーは多様である、請求項94に記載のシステム。
- 無線エネルギーを受信するための埋込み可能な固有エネルギー・レシーバを備え、
内部第1のコイルを備えるエネルギー・レシーバおよび第1のコイルに接続している第1の電子回路であって、
無線エネルギーを伝導するための外部エネルギー送信器、外部第2のコイルを備えているエネルギー送信器および第2のコイルに接続している第2の電子回路、エネルギー送信器の外部第2のコイルは、エネルギー・レシーバの第1のコイルによって受け取られる無線エネルギーを伝動する、さらにオン/オフに内部第1のコイルの接続を第1の電子回路に移すための電源スイッチから更に成っているシステムであって、第1のコイルの荷電に関連したフィードバック情報が外部第2のコイルの積荷のインピーダンス変化の形で外部エネルギー送信器によって受け取られるように、電源スイッチがオン/オフに内部第1のコイルの接続を第1の電子回路に移す請求項77に記載のシステム。 - 無線エネルギーを受信するための埋込み可能な固有エネルギー・レシーバを備え、
内部第1のコイルを備えているエネルギー・レシーバおよび第1のコイルに接続している第1の電子回路、そして、無線エネルギーを伝導するための外部エネルギー送信器、
外部第2のコイルを備えているエネルギー送信器および第2のコイルに接続している第2の電子回路、エネルギー送信器の外部第2のコイルは、エネルギー・レシーバの第1のコイルによって受け取られる無線エネルギーを伝動する、フィードバック・デバイスから成っている請求項77に記載のシステム - エネルギー送信器が得られた共役因子に応答して送信されたエネルギーを制御する、請求項98に記載のシステム。
- 外部第2のコイルは第2のコイルの最適設置を確立するために内部第1のコイルに関して移動するのに適していて、共役因子は最大にされる、請求項98に記載のシステム。
- 外部第2のコイルがフィードバック情報を判定デバイスにおいて成し遂げるために転送されたエネルギーの量を調整するのに適している、請求項100に記載のシステム。
- チャンバに流体を注入するための針によって透過されるのに適している自己気密膜から成る、複数のチャンバから成る単一の、埋込み可能な注入ポート装置。
- チャンバの量、チャンバのうちの少なくとも2つを定めている各々の前記チャンバ構成壁セクションが共用壁セクションの2つの側にあって共用壁セクションを有する、請求項102に記載の埋込み可能な注入ポート装置。
- 共用壁セクションは、自己気密膜であることを特徴とする請求項103に記載の埋込み可能な注入ポート装置。
- 複数のチャンバのうちの2つが第一および第二のチャンバである、第一チャンバによる埋込み可能な注入ポート装置は最低2つの壁セクションで自己気密膜であることから成り少なくとも2つの壁セクションのうちの1つは前記共用壁セクションであって、針が前記第一チャンバの第1の穿通性の前記2つの自己気密メンブレンウォール区画によって前記第2の室に入ることができるように、前記第1および第2のチャンバは整列配置される、請求項104に記載の埋込み可能な注入ポート装置。
- 複数のチャンバのうちの3つが第一および1秒および第三小室であって、前記第1および第2のチャンバは、自己気密膜であって少なくとも2つの壁セクションを有し、前記第一、を備えている、請求項105に記載の針が前記第一チャンバの第1の穿通性の前記2つの自己気密メンブレンウォール区画および前記第2の室の穿通性の前記2つの自己気密メンブレンウォール区画によって前記第三小室に入ることができるように、第2および第三小室は整列配置される、請求項105に記載の埋込み可能な注入ポート装置。
- 3つのチャンバであることを特徴とする、請求項102に記載の埋込み可能な注入ポート装置。
- 4つのチャンバであることを特徴とする、請求項102記載の埋込み可能な注入ポート装置。
- チャンバは、少なくとも5つのチャンバであることを特徴とする請求項102に記載の埋込み可能な注入ポート装置。
- 前記注入ポート装置が複数の導管を各々の前記複数のチャンバを有する流体接続に含む、請求項102から108のいずれかに記載の埋込み可能注入ポート装置。
- 導管を備える成るドレナージ装置であって、その導管は第1および第2の部分を含み、少なくとも第1の部分の一部が心膜内部の流体を受けるのに適し、第2の部分は、その一部から、心膜の外側に置かれて心膜から流体を排出するのに適している、心膜ドレナージ。
- 第2の部分が前記患者の心膜から前記患者の腹部まで流体を移動するための前記患者の腹部に置かれるのに適している、請求項111に記載の心膜ドレナージ装置。
- 前記排水デバイスは埋込み可能な容器から成っていて、導管の第2の部分は容器を有する流体接続に適している、請求項111に記載の心膜ドレナージ装置。
- 心臓周囲の排水デバイスが請求項111に一致して。少なくとも、一部の前記第一区分は、複数のホールから成って、移植されるときに心嚢の内部から流体を受け取るのに適している、請求項111に記載の心嚢ドレナージ装置。
- 心筋に外力を作用させることによって患者の心臓のポンプ機能を高めるため、埋込み可能なデバイスの外科的な配置を、腹部を介して実行する方法であって、前記埋込み可能なデバイスには少なくとも1つの心臓接触器官が含まれ、その心臓接触器官は、当該埋込み可能なデバイスが患者に埋込まれた後においては、力を作用させる心臓の領域を変えられるように適合されており、
− 患者の腹部への針または管のような器具を挿入し、
− その針または管のような器具を用いて、腹腔を拡大して腹部をガスで満たし、
− 少なくとも2つの腹腔鏡トラカールを患者の身体内に配置し、
− 腹腔鏡トラカールの1つを介して腹部へカメラを挿入し、
− 腹腔鏡トラカールの別の1つを介して切開器具を挿入し、
− 隔膜に開口部をつくること、
− 患者の心臓おける意図した配置領域を切開し、
− 患者の心臓に心臓接触器官を配置し、
− 動作デバイスを、患者の胸骨,肋骨または脊椎骨に結合させて配置し、その動作デバイスは、心臓接触器官を作動させて心臓に外側から力が周期的に作用させられ得るようになし、
− 心臓のポンプ機能を高めるため前記埋込み可能デバイスを駆動するエネルギー源に接続し、
− 心臓接触器官の位置の調整をする、
ことを特徴とする方法。 - 調整が非侵襲的に身体の外側から実行される、請求項115に記載の方法。
- 心筋に外力を作用させることによって患者の心臓のポンプ機能を高めるため、埋込み可能なデバイスの外科的な配置を、腹部を介して実行する方法であって、前記埋込み可能なデバイスには少なくとも1つの心臓接触器官が含まれ、その心臓接触器官は、当該埋込み可能なデバイスが患者に埋込まれた後においては、力を作用させる心臓の領域を変えられるように適合されており、
− 皮膚を切り、腹部を切開し、
− 隔膜に開口部を作り、
− 前記開口部を通して、患者の心臓に意図された配置領域を作り、
− 患者の心臓に心臓接触器官を配置し、
− 胸骨または肋骨または脊椎に結合させて動作デバイスを、心臓接触器官を作動させて心臓に外側から力が周期的に作用させられ得るように配置し、
− 心臓のポンプ機能を高めるため前記埋込み可能デバイスを駆動するエネルギー源に接続し、
− 心臓接触器官の位置の調整をする、
ことを特徴とする方法。 - 調整が非侵襲的に身体の外側から実行される、請求項117に記載の方法。
- 胸の隔膜の前記開口部が心膜が胸の隔膜に接続している胸の隔膜の部分において実行される、請求項115−118のいずれかに記載の方法。
- 作動させ得るジョイントは人体の外側でから作動させ得る、請求項10ー13のいずれかに記載の埋込み可能デバイス。
- 作動させ得るジョイントが電波式遠隔操作を使用している人体の外側でから手術可能である、請求項120に記載の埋込み可能デバイス。
- 請求項120 手術可能なジョイントが観血的に、接点に着くために患者の皮膚を貫通するのに適していて、ツールを使用している人体の外側でから手術可能である、請求項120に記載の埋込み可能デバイス。
- 埋込み可能な注入ポート装置および液圧弁を含み、液圧系統は、複数の体積に接続している前記弁につながっって、複数の体積は一度に注入ポートと1つの体積を接続している弁の位置を変えることによって作動油を使用して個別に調整されるのに適していて注入ポートは流体を注入するための針によって透過されるのに適している自己気密膜から成る、そして、前記弁は個別に注入ポートと体積のいずれかを接続するのに適している、請求項22−29のいずれか1項に記載の医療装置。
Applications Claiming Priority (33)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE0802136 | 2008-10-10 | ||
| SE0802142-0 | 2008-10-10 | ||
| SE0802144 | 2008-10-10 | ||
| SE0802135 | 2008-10-10 | ||
| SE0802139-6 | 2008-10-10 | ||
| SE0802142 | 2008-10-10 | ||
| SE0802139 | 2008-10-10 | ||
| SE0802140-4 | 2008-10-10 | ||
| SE0802141 | 2008-10-10 | ||
| SE0802144-6 | 2008-10-10 | ||
| SE0802140 | 2008-10-10 | ||
| SE0802135-4 | 2008-10-10 | ||
| SE0802143-8 | 2008-10-10 | ||
| SE0802136-2 | 2008-10-10 | ||
| SE0802143 | 2008-10-10 | ||
| SE0802141-2 | 2008-10-10 | ||
| US20238209P | 2009-02-24 | 2009-02-24 | |
| US20238309P | 2009-02-24 | 2009-02-24 | |
| US20238009P | 2009-02-24 | 2009-02-24 | |
| US61/202,380 | 2009-02-24 | ||
| US61/202,383 | 2009-02-24 | ||
| US61/202,382 | 2009-02-24 | ||
| US20240509P | 2009-02-25 | 2009-02-25 | |
| US20240609P | 2009-02-25 | 2009-02-25 | |
| US20239309P | 2009-02-25 | 2009-02-25 | |
| US20240709P | 2009-02-25 | 2009-02-25 | |
| US20240409P | 2009-02-25 | 2009-02-25 | |
| US61/202,406 | 2009-02-25 | ||
| US61/202,393 | 2009-02-25 | ||
| US61/202,405 | 2009-02-25 | ||
| US61/202,404 | 2009-02-25 | ||
| US61/202,407 | 2009-02-25 | ||
| PCT/SE2009/000459 WO2010042022A1 (en) | 2008-10-10 | 2009-10-12 | Heart help device, system, and method |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013216383A Division JP5894134B2 (ja) | 2008-10-10 | 2013-10-17 | 心臓支援デバイスおよびシステム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012505016A true JP2012505016A (ja) | 2012-03-01 |
| JP2012505016A5 JP2012505016A5 (ja) | 2012-11-29 |
| JP5395183B2 JP5395183B2 (ja) | 2014-01-22 |
Family
ID=42100788
Family Applications (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011530988A Active JP5395183B2 (ja) | 2008-10-10 | 2009-10-12 | 心臓支援デバイス、システム、および方法 |
| JP2013216383A Active JP5894134B2 (ja) | 2008-10-10 | 2013-10-17 | 心臓支援デバイスおよびシステム |
| JP2016033883A Active JP6082142B2 (ja) | 2008-10-10 | 2016-02-25 | 心臓支援デバイスおよびシステム |
| JP2017007457A Active JP6298184B2 (ja) | 2008-10-10 | 2017-01-19 | 心臓支援デバイスおよびシステム |
| JP2018029588A Active JP6674491B2 (ja) | 2008-10-10 | 2018-02-22 | 心臓支援デバイスおよびシステム |
| JP2023137075A Pending JP2023153386A (ja) | 2008-10-10 | 2023-08-25 | 埋込み可能な注入ポート・ユニットおよび液圧システム |
Family Applications After (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013216383A Active JP5894134B2 (ja) | 2008-10-10 | 2013-10-17 | 心臓支援デバイスおよびシステム |
| JP2016033883A Active JP6082142B2 (ja) | 2008-10-10 | 2016-02-25 | 心臓支援デバイスおよびシステム |
| JP2017007457A Active JP6298184B2 (ja) | 2008-10-10 | 2017-01-19 | 心臓支援デバイスおよびシステム |
| JP2018029588A Active JP6674491B2 (ja) | 2008-10-10 | 2018-02-22 | 心臓支援デバイスおよびシステム |
| JP2023137075A Pending JP2023153386A (ja) | 2008-10-10 | 2023-08-25 | 埋込み可能な注入ポート・ユニットおよび液圧システム |
Country Status (8)
| Country | Link |
|---|---|
| US (4) | US20110196484A1 (ja) |
| EP (3) | EP4282462A3 (ja) |
| JP (6) | JP5395183B2 (ja) |
| CN (2) | CN102245225B (ja) |
| AU (6) | AU2009302945C1 (ja) |
| CA (3) | CA2776450C (ja) |
| ES (1) | ES2950024T3 (ja) |
| WO (4) | WO2010042014A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016509917A (ja) * | 2013-03-15 | 2016-04-04 | ミルックス・ホールディング・エスエイ | 電気モータ及び歯車系を備える操作可能なインプラント |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6471635B1 (en) | 2000-02-10 | 2002-10-29 | Obtech Medical Ag | Anal incontinence disease treatment with controlled wireless energy supply |
| US6482145B1 (en) | 2000-02-14 | 2002-11-19 | Obtech Medical Ag | Hydraulic anal incontinence treatment |
| US6464628B1 (en) | 1999-08-12 | 2002-10-15 | Obtech Medical Ag | Mechanical anal incontinence |
| DE60128971T2 (de) | 2000-02-10 | 2008-02-07 | Potencia Medical Ag | Mechanische Vorrichtung zur Impotenzbehandlung |
| MX339106B (es) | 2000-02-11 | 2016-05-12 | Potentica Ag | Aparato para tratamiento de impotencia con medio de transformacion de energia. |
| WO2001047441A2 (en) | 2000-02-14 | 2001-07-05 | Potencia Medical Ag | Penile prosthesis |
| ATE324087T1 (de) | 2000-02-14 | 2006-05-15 | Potencia Medical Ag | Männliche impotentzprothesevorrichtung mit drahtloser energieversorgung |
| CA2999337C (en) | 2008-01-28 | 2023-03-07 | Implantica Patent Ltd. | An implantable drainage device |
| CA2749782C (en) | 2008-01-29 | 2021-06-15 | Milux Holding S.A. | Apparatus for treating obesity |
| WO2010042046A1 (en) | 2008-10-10 | 2010-04-15 | Milux Holding S.A. | Apparatus, system and operation method for the treatment of female sexual dysfunction |
| HUE056076T2 (hu) | 2008-10-10 | 2022-01-28 | Medicaltree Patent Ltd | Szívsegítõ készülék és rendszer |
| US8475355B2 (en) * | 2008-10-10 | 2013-07-02 | Milux Holding S.A. | Heart help device, system, and method |
| CA2776450C (en) | 2008-10-10 | 2018-08-21 | Peter Forsell | Heart help device, system, and method |
| AU2009302955B2 (en) | 2008-10-10 | 2017-01-05 | Implantica Patent Ltd. | Fastening means for implantable medical control assembly |
| EP2349104B1 (en) * | 2008-10-10 | 2015-12-23 | Kirk Promotion LTD. | Stimulation of penis erection |
| CA2776475A1 (en) * | 2008-10-10 | 2010-04-15 | Peter Forsell | An improved artificial valve |
| CA3218513A1 (en) | 2008-10-10 | 2010-04-15 | Medicaltree Patent Ltd. | Heart help device, system, and method |
| EP3851076A1 (en) | 2008-10-10 | 2021-07-21 | MedicalTree Patent Ltd. | An improved artificial valve |
| US10668196B2 (en) * | 2008-10-10 | 2020-06-02 | Peter Forsell | Heart assisting device |
| WO2010042008A1 (en) * | 2008-10-10 | 2010-04-15 | Milux Holding Sa | Heart help pump, system, and method |
| US8874215B2 (en) | 2008-10-10 | 2014-10-28 | Peter Forsell | System, an apparatus, and a method for treating a sexual dysfunctional female patient |
| US10952836B2 (en) | 2009-07-17 | 2021-03-23 | Peter Forsell | Vaginal operation method for the treatment of urinary incontinence in women |
| US9949812B2 (en) | 2009-07-17 | 2018-04-24 | Peter Forsell | Vaginal operation method for the treatment of anal incontinence in women |
| WO2013102465A1 (en) * | 2012-01-05 | 2013-07-11 | Ibrahim Mostafa Mohamed Ibrahim | Artificial heart pump |
| US8886311B2 (en) * | 2012-01-27 | 2014-11-11 | Medtronic, Inc. | Techniques for mitigating motion artifacts from implantable physiological sensors |
| CN103854544B (zh) * | 2012-11-30 | 2016-04-13 | 中国科学院沈阳自动化研究所 | 液压或气压人工肌肉驱动的心脏腔室模拟器 |
| US9603984B2 (en) | 2014-09-03 | 2017-03-28 | Tci Llc | Triple helix driveline cable and methods of assembly and use |
| EP3020373A1 (en) * | 2014-11-17 | 2016-05-18 | Painer Zotz | A device and system for augmenting a heart |
| JP6541971B2 (ja) * | 2014-12-26 | 2019-07-10 | 合同会社ジャパン・メディカル・クリエーティブ | 心臓支援補助装置 |
| CN108289729B (zh) * | 2015-07-15 | 2021-01-12 | 得克萨斯A&M大学体系 | 自膨胀心脏辅助装置 |
| US10383715B2 (en) * | 2015-09-18 | 2019-08-20 | Mhn Biotech Llc | Transdermally powered electric pump in reservoir inflator for inflatable medical implants |
| DE102016115940A1 (de) * | 2016-08-26 | 2018-03-01 | Universitätsklinikum Erlangen | Blutkreislauf-Unterstützungsvorrichtung |
| US10589013B2 (en) * | 2016-08-26 | 2020-03-17 | Tci Llc | Prosthetic rib with integrated percutaneous connector for ventricular assist devices |
| WO2018132713A1 (en) | 2017-01-12 | 2018-07-19 | Tc1 Llc | Driveline bone anchors and methods of use |
| EP4233989A3 (en) | 2017-06-07 | 2023-10-11 | Shifamed Holdings, LLC | Intravascular fluid movement devices, systems, and methods of use |
| JP7319266B2 (ja) | 2017-11-13 | 2023-08-01 | シファメド・ホールディングス・エルエルシー | 血管内流体移動デバイス、システム、および使用方法 |
| CN112004563A (zh) | 2018-02-01 | 2020-11-27 | 施菲姆德控股有限责任公司 | 血管内血泵以及使用和制造方法 |
| US11660444B2 (en) | 2018-07-31 | 2023-05-30 | Manicka Institute Llc | Resilient body component contact for a subcutaneous device |
| US10471251B1 (en) | 2018-07-31 | 2019-11-12 | Manicka Institute Llc | Subcutaneous device for monitoring and/or providing therapies |
| US11179571B2 (en) | 2018-07-31 | 2021-11-23 | Manicka Institute Llc | Subcutaneous device for monitoring and/or providing therapies |
| JP2021532956A (ja) * | 2018-07-31 | 2021-12-02 | カルヤン テクノロジーズ, インコーポレーテッドCalyan Technologies, Inc. | 皮下デバイス |
| US10716511B2 (en) | 2018-07-31 | 2020-07-21 | Manicka Institute Llc | Subcutaneous device for monitoring and/or providing therapies |
| US10646721B2 (en) * | 2018-07-31 | 2020-05-12 | Manicka Institute Llc | Injectable subcutaneous device |
| US10576291B2 (en) | 2018-07-31 | 2020-03-03 | Manicka Institute Llc | Subcutaneous device |
| US11433233B2 (en) | 2020-11-25 | 2022-09-06 | Calyan Technologies, Inc. | Electrode contact for a subcutaneous device |
| US11717674B2 (en) | 2018-07-31 | 2023-08-08 | Manicka Institute Llc | Subcutaneous device for use with remote device |
| EP3845255B1 (en) | 2018-08-30 | 2023-03-15 | Cyberdyne Inc. | Cardiac pumping assistance device |
| CN113727660A (zh) * | 2019-02-26 | 2021-11-30 | 佩克阿西斯特公司 | 用于经皮气动心脏辅助的设备、系统和方法 |
| JP2022540616A (ja) | 2019-07-12 | 2022-09-16 | シファメド・ホールディングス・エルエルシー | 血管内血液ポンプならびに製造および使用の方法 |
| WO2021016372A1 (en) | 2019-07-22 | 2021-01-28 | Shifamed Holdings, Llc | Intravascular blood pumps with struts and methods of use and manufacture |
| EP4034192A4 (en) | 2019-09-25 | 2023-11-29 | Shifamed Holdings, LLC | INTRAVASCULAR BLOOD PUMP SYSTEMS AND METHODS OF USE AND CONTROL THEREOF |
| US10987060B1 (en) | 2020-09-14 | 2021-04-27 | Calyan Technologies, Inc. | Clip design for a subcutaneous device |
| CN113975623B (zh) * | 2021-09-27 | 2023-10-31 | 江苏大学 | 一种新型负压无接触式心脏泵 |
| CN114306922B (zh) * | 2021-12-25 | 2023-08-25 | 上海炫脉医疗科技有限公司 | 一种磁控式心脏辅助系统 |
| CN114367032B (zh) * | 2022-01-06 | 2023-07-21 | 中国科学院力学研究所 | 一种柔性隔膜、电磁驱动囊式人工心脏及控制方法 |
| WO2023250102A1 (en) * | 2022-06-23 | 2023-12-28 | New York University | Semi-radiolucent patient-specific 3d-printed lattice titanium plate |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0614961B2 (ja) * | 1987-02-27 | 1994-03-02 | ヴァスコー インコーポレイテッド | 生体適合性心室補助および不整脈制御装置 |
| JPH09500549A (ja) * | 1993-05-27 | 1997-01-21 | フラウンホッファー−ゲゼルシャフト ツァ フェルダールング デァ アンゲヴァンテン フォアシュンク エー.ファオ. | 心臓の機能を補助するための装置 |
| JP2002527158A (ja) * | 1998-10-15 | 2002-08-27 | カーディオ・テクノロジーズ・インコーポレーテッド | 心臓支援装置と併用するための受動除細動電極 |
Family Cites Families (487)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2060913A (en) | 1934-07-07 | 1936-11-17 | Western Electric Co | Electrical conductor |
| US2795641A (en) | 1953-12-03 | 1957-06-11 | Rowell Ross Fredrick | Cord supporting coil |
| GB885674A (en) * | 1959-07-20 | 1961-12-28 | Interscience Res Corp | Improvements in or relating to mechanical hearts |
| US3209081A (en) | 1961-10-02 | 1965-09-28 | Behrman A Ducote | Subcutaneously implanted electronic device |
| GB1194358A (en) | 1967-11-22 | 1970-06-10 | Dana Christopher Mears | Fluid Flow Control Valve. |
| US3662758A (en) | 1969-06-30 | 1972-05-16 | Mentor Corp | Stimulator apparatus for muscular organs with external transmitter and implantable receiver |
| US3598287A (en) | 1969-08-01 | 1971-08-10 | Heiko T De Man | Liquid dispenser with level control |
| US3705575A (en) | 1969-09-26 | 1972-12-12 | Lynn Euryl Edwards | Incontinence device for female use |
| US3731681A (en) | 1970-05-18 | 1973-05-08 | Univ Minnesota | Implantable indusion pump |
| US3731679A (en) | 1970-10-19 | 1973-05-08 | Sherwood Medical Ind Inc | Infusion system |
| US3750194A (en) | 1971-03-16 | 1973-08-07 | Fairchild Industries | Apparatus and method for reversibly closing a natural or implanted body passage |
| US3692027A (en) | 1971-04-23 | 1972-09-19 | Everett H Ellinwood Jr | Implanted medication dispensing device and method |
| FR2138333B1 (ja) | 1971-05-24 | 1974-03-08 | Rhone Poulenc Sa | |
| US3817237A (en) | 1972-08-24 | 1974-06-18 | Medtronic Inc | Regulatory apparatus |
| US3863622A (en) | 1973-01-09 | 1975-02-04 | Robert Enno Buuck | Incontinence system and methods of implanting and using same |
| US3875928A (en) | 1973-08-16 | 1975-04-08 | Angelchik Jean P | Method for maintaining the reduction of a sliding esophageal hiatal hernia |
| US3906674A (en) | 1973-12-13 | 1975-09-23 | Lowell D Stone | Valve cleaner |
| US3923060A (en) | 1974-04-23 | 1975-12-02 | Jr Everett H Ellinwood | Apparatus and method for implanted self-powered medication dispensing having timing and evaluator means |
| US4003379A (en) | 1974-04-23 | 1977-01-18 | Ellinwood Jr Everett H | Apparatus and method for implanted self-powered medication dispensing |
| US3954102A (en) | 1974-07-19 | 1976-05-04 | American Medical Systems, Inc. | Penile erection system and methods of implanting and using same |
| US4026305A (en) | 1975-06-26 | 1977-05-31 | Research Corporation | Low current telemetry system for cardiac pacers |
| FR2347030A1 (fr) | 1975-08-04 | 1977-11-04 | Guiset Jacques | Vessie prothetique |
| US4009711A (en) | 1976-03-17 | 1977-03-01 | Uson Aurelio C | Penile prosthesis for the management of erectile impotence |
| US4243306A (en) | 1978-05-30 | 1981-01-06 | Bononi Walter H | Pad device |
| US4246893A (en) | 1978-07-05 | 1981-01-27 | Daniel Berson | Inflatable gastric device for treating obesity |
| US4221219A (en) | 1978-07-31 | 1980-09-09 | Metal Bellows Corporation | Implantable infusion apparatus and method |
| SE412748B (sv) | 1978-09-15 | 1980-03-17 | Engwall Sten | Skotvinsch |
| US4201202A (en) | 1978-09-25 | 1980-05-06 | Medical Engineering Corp. | Penile implant |
| US4235222A (en) | 1978-10-19 | 1980-11-25 | Istrate Ionescu | Heat-responsive alignment system and solar collection device |
| US4265241A (en) | 1979-02-28 | 1981-05-05 | Andros Incorporated | Implantable infusion device |
| US4304225A (en) * | 1979-04-30 | 1981-12-08 | Lloyd And Associates | Control system for body organs |
| SU906526A1 (ru) | 1979-07-13 | 1982-02-23 | Куйбышевский Медицинский Институт Им. Д.И.Ульянова | Способ наложени анастомоза при пластике пищевода желудком |
| US4271827A (en) | 1979-09-13 | 1981-06-09 | Angelchik Jean P | Method for prevention of gastro esophageal reflux |
| CA1156003A (en) | 1979-10-30 | 1983-11-01 | Juan Voltas Baro | Apparatus for the continence of digestive stomas and anal incontinence |
| US4274407A (en) | 1979-11-13 | 1981-06-23 | Med Pump, Inc. | Fluid injection system |
| US4426893A (en) | 1980-04-28 | 1984-01-24 | Lear Siegler, Inc. | High production serrator |
| US4318396A (en) | 1980-05-15 | 1982-03-09 | Medical Engineering Corporation | Penile prosthesis |
| US4419985A (en) | 1980-08-28 | 1983-12-13 | Medical Engineering Corporation | Apparatus for reversibly closing a body passage |
| US4342308A (en) | 1980-10-02 | 1982-08-03 | Medical Engineering Corporation | Penile erectile system |
| US4400169A (en) | 1980-10-27 | 1983-08-23 | University Of Utah Research Foundation | Subcutaneous peritoneal injection catheter |
| JPS5780573A (en) | 1980-11-07 | 1982-05-20 | Mitsubishi Electric Corp | Tester for relay |
| JPS58500593A (ja) | 1981-03-18 | 1983-04-21 | ブラム,ギユンタ−,ヴアルタ−,オツト− | 磁気的に懸垂されかつ回転される羽根車ポンプ装置 |
| US4412530A (en) | 1981-09-21 | 1983-11-01 | American Medical Systems, Inc. | Dual-mode valve pressure regulating system |
| US4369771A (en) | 1981-09-24 | 1983-01-25 | Medical Engineering Corporation | Penile erectile system |
| US4424807A (en) | 1981-10-20 | 1984-01-10 | Evans Sr Alvin S | Penile implant |
| US4456175A (en) | 1981-12-03 | 1984-06-26 | Dnepropetrovsky Khimiko-Tekhnologichesky Institut Imeni F. E. Dzerzhinskogo | Nozzle assembly for liquid spraying in coke oven ascension pipe |
| IT1155105B (it) * | 1982-03-03 | 1987-01-21 | Roberto Parravicini | Dispositivo di impianto per il sostentamento dell attivita del miocardio |
| US4509947A (en) | 1982-08-02 | 1985-04-09 | Medtronic, Inc. | Self-cleaning drug delivery catheter and storage bladder |
| US4628928A (en) | 1982-08-09 | 1986-12-16 | Medtronic, Inc. | Robotic implantable medical device and/or component restoration system |
| EP0102548B1 (en) | 1982-08-09 | 1988-11-02 | Medtronic, Inc. | Apparatus including an at least partially implantable device and method for maintaining such a device viable |
| US4771772A (en) | 1982-08-09 | 1988-09-20 | Medtronic, Inc. | Robotic implantable medical device and/or component restoration system |
| US4652265A (en) * | 1982-09-23 | 1987-03-24 | Mcdougall David A | Implantable blood pump and integral apparatus for the operation thereof |
| US4599081A (en) | 1982-09-30 | 1986-07-08 | Cohen Fred M | Artificial heart valve |
| US4542753A (en) | 1982-12-22 | 1985-09-24 | Biosonics, Inc. | Apparatus and method for stimulating penile erectile tissue |
| IL67773A (en) | 1983-01-28 | 1985-02-28 | Antebi E | Tie for tying live tissue and an instrument for performing said tying operation |
| US4602625A (en) | 1983-03-04 | 1986-07-29 | Medical Engineering Corporation | Penile erectile system |
| US4505710A (en) | 1983-05-13 | 1985-03-19 | Collins Earl R | Implantable fluid dispensing system |
| US4491461A (en) | 1983-05-17 | 1985-01-01 | Hoekstra Irenus A | Method of desulfurization of flue gases |
| DE3378563D1 (en) | 1983-08-22 | 1989-01-05 | Univ Utah Res Found | Peritoneal injection catheter apparatus |
| US4584994A (en) | 1983-09-30 | 1986-04-29 | Charles Bamberger | Electromagnetic implant |
| US4550720A (en) | 1983-11-15 | 1985-11-05 | Medical Engineering Corporation | Capacitance device for medical implant |
| FR2555056B1 (fr) | 1983-11-18 | 1986-02-28 | Aerospatiale | Prothese cardiaque totale comportant deux pompes decouplees associees en une unite fonctionnellement indissociable, et valves electrocommandees pour une telle prothese |
| US4563175A (en) | 1983-12-19 | 1986-01-07 | Lafond Margaret | Multiple syringe pump |
| US4559939A (en) | 1984-02-13 | 1985-12-24 | Lockheed Corporation | Compatible smoke and oxygen masks for use on aircraft |
| WO1985004112A1 (en) | 1984-03-21 | 1985-09-26 | Mclaughlin, William, Francis | Method and apparatus for filtration |
| US4556050A (en) | 1984-05-02 | 1985-12-03 | Hodgson Darel E | Artificial sphincter including a shape memory member |
| US4559930A (en) | 1984-05-07 | 1985-12-24 | Cobiski John F | Thoracic bench |
| US4583523A (en) * | 1984-07-02 | 1986-04-22 | Lloyd & Associates | Implantable heart assist device and method of implanting same |
| AU592772B2 (en) | 1984-09-05 | 1990-01-25 | Vaso Products Australia Pty. Limited | Control of blood flow |
| US4568851A (en) | 1984-09-11 | 1986-02-04 | Raychem Corporation | Piezoelectric coaxial cable having a helical inner conductor |
| US4664100A (en) | 1984-11-19 | 1987-05-12 | Rudloff David A C | Penile implant |
| US4756949A (en) | 1984-11-29 | 1988-07-12 | Kimberly-Clark Corporation | Method for producing pad structures with viscoelastic cores and article so made |
| US4602621A (en) | 1984-12-18 | 1986-07-29 | Hakky Said I | Manually actuated, self contained penile implant |
| US4828990A (en) | 1984-12-27 | 1989-05-09 | Naoki Higashi | Method for purifying an interferon |
| EP0471421B1 (en) | 1984-12-28 | 1996-05-22 | Kabushiki Kaisha Toshiba | Stabilizing power source apparatus |
| US4610658A (en) * | 1985-02-21 | 1986-09-09 | Henry Buchwald | Automated peritoneovenous shunt |
| EP0200286A3 (en) | 1985-02-28 | 1987-01-14 | Quotidian No. 100 Pty. Limited | Control of blood flow |
| US4679560A (en) | 1985-04-02 | 1987-07-14 | Board Of Trustees Of The Leland Stanford Junior University | Wide band inductive transdermal power and data link |
| US4592339A (en) | 1985-06-12 | 1986-06-03 | Mentor Corporation | Gastric banding device |
| US4696288A (en) | 1985-08-14 | 1987-09-29 | Kuzmak Lubomyr I | Calibrating apparatus and method of using same for gastric banding surgery |
| US4723538A (en) | 1986-10-16 | 1988-02-09 | Stewart Edward T | Penile constrictor ring |
| US4711231A (en) | 1986-11-03 | 1987-12-08 | Aaron N. Finegold | Implantable prosthesis system |
| US4771780A (en) | 1987-01-15 | 1988-09-20 | Siemens-Pacesetter, Inc. | Rate-responsive pacemaker having digital motion sensor |
| US5098369A (en) * | 1987-02-27 | 1992-03-24 | Vascor, Inc. | Biocompatible ventricular assist and arrhythmia control device including cardiac compression pad and compression assembly |
| FR2621248B1 (fr) | 1987-03-31 | 1989-08-18 | Sroussi Donald | Dispositif implantable dans l'organisme pour l'injection repetee de doses precises de substances medicamenteuses liquides |
| US4829990A (en) | 1987-06-25 | 1989-05-16 | Thueroff Joachim | Implantable hydraulic penile erector |
| NL8701644A (nl) | 1987-07-13 | 1989-02-01 | Cordis Europ | Inrichting voor dosering in het lichaam van een vloeibaar materiaal. |
| US4846794A (en) | 1987-08-13 | 1989-07-11 | The Cleveland Clinic Foundation | Coiled tubing for intravenous and intra-arterial applications |
| US4942668A (en) | 1988-05-11 | 1990-07-24 | Zircon International, Inc. | Digital inclinometer |
| US4979955A (en) | 1988-06-06 | 1990-12-25 | Smith Robert M | Power assisted prosthetic heart valve |
| US5152743A (en) | 1988-08-05 | 1992-10-06 | Healthdyne, Inc. | Apparatus and method for selective separation of blood cholesterol |
| US5151082A (en) | 1988-08-05 | 1992-09-29 | Heathdyne, Inc. | Apparatus and method for kidney dialysis using plasma in lieu of blood |
| US5224926A (en) | 1988-08-05 | 1993-07-06 | Healthdyne, Inc. | Transvivo plasma extraction catheter device |
| US4950224A (en) | 1988-08-05 | 1990-08-21 | Healthdyne, Inc. | Apparatus and method for in vivo plasma separation |
| DE68922497T2 (de) | 1988-08-24 | 1995-09-14 | Marvin J Slepian | Endoluminale dichtung mit bisdegradierbaren polymeren. |
| US4902279A (en) | 1988-10-05 | 1990-02-20 | Autoject Systems Inc. | Liquid medicament safety injector |
| US5123428A (en) | 1988-10-11 | 1992-06-23 | Schwarz Gerald R | Laparoscopically implanting bladder control apparatus |
| US5012822A (en) | 1988-10-11 | 1991-05-07 | Schwarz Gerald R | Method for controlling urinary incontinence |
| US4982731A (en) | 1988-10-26 | 1991-01-08 | The Regents Of The University Of California | Implantable system and method for augmenting penile erection |
| US5062416A (en) | 1988-12-01 | 1991-11-05 | Stucks Albert A | Penile erection system |
| WO1991000094A1 (en) | 1989-06-28 | 1991-01-10 | Finn Tranberg | A new papaverine injection system |
| DE58903472D1 (de) | 1989-08-09 | 1993-03-18 | Siemens Ag | Implantierbarer injektionskoerper. |
| US4941461A (en) | 1989-09-05 | 1990-07-17 | Fischell Robert | Electrically actuated inflatable penile erection device |
| US5042084A (en) | 1989-09-07 | 1991-08-20 | Cochlear Pty. Limited | Three wire system for Cochlear implant processor |
| US5876425A (en) | 1989-09-22 | 1999-03-02 | Advanced Bionics Corporation | Power control loop for implantable tissue stimulator |
| US5048511A (en) | 1989-10-06 | 1991-09-17 | Advanced Surgical Intervention, Inc. | Method and apparatus for treating impotence |
| US4958630A (en) | 1989-10-06 | 1990-09-25 | Advanced Surgical Intervention, Inc. | Method and apparatus for treating impotence |
| US5057075A (en) | 1989-12-13 | 1991-10-15 | Moncrief Jack W | Method for implanting a catheter |
| US4983177A (en) | 1990-01-03 | 1991-01-08 | Wolf Gerald L | Method and apparatus for reversibly occluding a biological tube |
| US5112202A (en) | 1990-01-31 | 1992-05-12 | Ntn Corporation | Turbo pump with magnetically supported impeller |
| US5074868A (en) | 1990-08-03 | 1991-12-24 | Inamed Development Company | Reversible stoma-adjustable gastric band |
| US5006106A (en) | 1990-10-09 | 1991-04-09 | Angelchik Jean P | Apparatus and method for laparoscopic implantation of anti-reflux prosthesis |
| US5316543A (en) | 1990-11-27 | 1994-05-31 | Cook Incorporated | Medical apparatus and methods for treating sliding hiatal hernias |
| US5226429A (en) | 1991-06-20 | 1993-07-13 | Inamed Development Co. | Laparoscopic gastric band and method |
| US5358474A (en) | 1991-07-02 | 1994-10-25 | Intermed, Inc. | Subcutaneous drug delivery device |
| US5250020A (en) | 1991-09-12 | 1993-10-05 | Mentor Corporation | Unitary inflatable penile prosthesis |
| US5443504A (en) * | 1991-09-30 | 1995-08-22 | Hill; John D. | Basic skeletal muscle energy conversion system |
| US5160338A (en) | 1991-11-13 | 1992-11-03 | Inamed Development Co. | Device for removing implantable articles |
| US5304206A (en) | 1991-11-18 | 1994-04-19 | Cyberonics, Inc. | Activation techniques for implantable medical device |
| FR2688693A1 (fr) | 1992-03-19 | 1993-09-24 | Ferriere Xavier | Sphincter artificiel, notamment urinaire. |
| FR2692777A1 (fr) | 1992-06-26 | 1993-12-31 | Alfieri Patrick | Dispositif de commande d'un organe artificiel implanté dans le corps humain. |
| AU4686993A (en) | 1992-07-30 | 1994-03-03 | Temple University - Of The Commonwealth System Of Higher Education | Direct manual cardiac compression device and method of use thereof |
| US5397354A (en) | 1992-08-19 | 1995-03-14 | Wilk; Peter J. | Method and device for removing a toxic substance from blood |
| US5297536A (en) | 1992-08-25 | 1994-03-29 | Wilk Peter J | Method for use in intra-abdominal surgery |
| US20020095164A1 (en) | 1997-06-26 | 2002-07-18 | Andreas Bernard H. | Device and method for suturing tissue |
| US5447526A (en) | 1992-12-24 | 1995-09-05 | Karsdon; Jeffrey | Transcutaneous electric muscle/nerve controller/feedback unit |
| US5449368A (en) | 1993-02-18 | 1995-09-12 | Kuzmak; Lubomyr I. | Laparoscopic adjustable gastric banding device and method for implantation and removal thereof |
| ES2125310T3 (es) | 1993-02-18 | 1999-03-01 | Lubomyr Ihor Kuzmak | Banda gastrica ajustable para laparoscopia. |
| US5272664A (en) | 1993-04-21 | 1993-12-21 | Silicon Graphics, Inc. | High memory capacity DRAM SIMM |
| EP0774984A1 (fr) * | 1993-05-14 | 1997-05-28 | GULDNER, Norbert | Procede d'entrainement d'un muscle squelettique pour un c ur biomecanique et c ur biomecanique utilisant un tel muscle |
| US5437605A (en) | 1993-05-27 | 1995-08-01 | Helmy; Ali M. | Remote controllable penile prosthetic system |
| US5601604A (en) | 1993-05-27 | 1997-02-11 | Inamed Development Co. | Universal gastric band |
| US5505733A (en) | 1993-10-22 | 1996-04-09 | Justin; Daniel F. | Intramedullary skeletal distractor and method |
| US5997501A (en) | 1993-11-18 | 1999-12-07 | Elan Corporation, Plc | Intradermal drug delivery device |
| US5518504A (en) | 1993-12-28 | 1996-05-21 | American Medical Systems, Inc. | Implantable sphincter system utilizing lifting means |
| US5415660A (en) | 1994-01-07 | 1995-05-16 | Regents Of The University Of Minnesota | Implantable limb lengthening nail driven by a shape memory alloy |
| US5501703A (en) | 1994-01-24 | 1996-03-26 | Medtronic, Inc. | Multichannel apparatus for epidural spinal cord stimulator |
| US5504700A (en) | 1994-02-22 | 1996-04-02 | Sun Microsystems, Inc. | Method and apparatus for high density sixteen and thirty-two megabyte single in-line memory module |
| US5454840A (en) | 1994-04-05 | 1995-10-03 | Krakovsky; Alexander A. | Potency package |
| US5453079A (en) | 1994-06-15 | 1995-09-26 | Schwaninger; Claude L. | Blood flow valve for treatment of male sexual impotence |
| ES2132682T3 (es) | 1994-07-11 | 1999-08-16 | Dacomed Corp | Aparato para ocluir vasos. |
| US5509888A (en) | 1994-07-26 | 1996-04-23 | Conceptek Corporation | Controller valve device and method |
| US5569187A (en) | 1994-08-16 | 1996-10-29 | Texas Instruments Incorporated | Method and apparatus for wireless chemical supplying |
| US5540731A (en) | 1994-09-21 | 1996-07-30 | Medtronic, Inc. | Method and apparatus for pressure detecting and treating obstructive airway disorders |
| US5571116A (en) | 1994-10-02 | 1996-11-05 | United States Surgical Corporation | Non-invasive treatment of gastroesophageal reflux disease |
| DE4435602C2 (de) | 1994-10-05 | 1998-07-16 | Gunter Preis | Verfahren und Vorrichtung zur Versorgung implantierter Meß-, Steuer- und Regelsysteme mit Energie und zum bidirektionalen Datentransfer |
| DE69530355D1 (de) | 1994-11-28 | 2003-05-22 | Ohio State University Columbus | Vorrichtung zur medizinischen Intervention |
| US5591217A (en) | 1995-01-04 | 1997-01-07 | Plexus, Inc. | Implantable stimulator with replenishable, high value capacitive power source and method therefor |
| DE19511998A1 (de) | 1995-03-31 | 1996-10-02 | Eska Medical Gmbh & Co | Implantierbare Vorrichtung zum wahlweisen Öffnen und Verschließen von rohrförmigen Körperorganen, insbesondere der Harnröhre |
| JPH08336069A (ja) | 1995-04-13 | 1996-12-17 | Eastman Kodak Co | 電子スチルカメラ |
| US5665065A (en) | 1995-05-26 | 1997-09-09 | Minimed Inc. | Medication infusion device with blood glucose data input |
| US5518499A (en) | 1995-06-06 | 1996-05-21 | Aghr; Arif H. | Intracavernous vasoactive pharmacological pump |
| US5702431A (en) | 1995-06-07 | 1997-12-30 | Sulzer Intermedics Inc. | Enhanced transcutaneous recharging system for battery powered implantable medical device |
| US5775331A (en) | 1995-06-07 | 1998-07-07 | Uromed Corporation | Apparatus and method for locating a nerve |
| US6176240B1 (en) | 1995-06-07 | 2001-01-23 | Conceptus, Inc. | Contraceptive transcervical fallopian tube occlusion devices and their delivery |
| KR100373772B1 (ko) | 1995-07-31 | 2003-09-13 | 심영택 | 발기부전증치료장치 |
| IE77523B1 (en) | 1995-09-11 | 1997-12-17 | Elan Med Tech | Medicament delivery device |
| US6102922A (en) | 1995-09-22 | 2000-08-15 | Kirk Promotions Limited | Surgical method and device for reducing the food intake of patient |
| US5771903A (en) | 1995-09-22 | 1998-06-30 | Kirk Promotions Limited | Surgical method for reducing the food intake of a patient |
| US5578069A (en) | 1995-12-06 | 1996-11-26 | Vnetritex, Inc. | Electrode deployment mechanism and method using artificial muscle |
| US5858001A (en) | 1995-12-11 | 1999-01-12 | Elan Medical Technologies Limited | Cartridge-based drug delivery device |
| AU2260397A (en) | 1996-01-31 | 1997-08-22 | Trustees Of The University Of Pennsylvania, The | Remote control drug delivery device |
| CA2226170A1 (en) | 1996-05-05 | 1997-11-13 | Influence Medical Technologies Ltd. | Implantable pump and prosthetic devices |
| US6689085B1 (en) * | 1996-07-11 | 2004-02-10 | Eunoe, Inc. | Method and apparatus for treating adult-onset dementia of the Alzheimer's type |
| US6835207B2 (en) | 1996-07-22 | 2004-12-28 | Fred Zacouto | Skeletal implant |
| ATE287245T1 (de) | 1996-08-09 | 2005-02-15 | Edwards Lifesciences Corp | Mechanische herzklappe mit magnet |
| US5814099A (en) | 1996-08-12 | 1998-09-29 | Bicer; Demetrio | Central opening curved bileaflet heart valve prosthesis |
| US5902336A (en) | 1996-10-15 | 1999-05-11 | Mirimedical, Inc. | Implantable device and method for removing fluids from the blood of a patient method for implanting such a device and method for treating a patient experiencing renal failure |
| DK0846474T3 (da) | 1996-10-30 | 2003-09-22 | Nihon Kohden Corp | Stimulationsapparat til forhindring af urininkontinens |
| US5845646A (en) | 1996-11-05 | 1998-12-08 | Lemelson; Jerome | System and method for treating select tissue in a living being |
| US5749909A (en) | 1996-11-07 | 1998-05-12 | Sulzer Intermedics Inc. | Transcutaneous energy coupling using piezoelectric device |
| FR2756485A1 (fr) | 1996-11-29 | 1998-06-05 | Cusset Claude | Sphincter urinaire prothetique a commande externe |
| US5735809A (en) | 1996-12-05 | 1998-04-07 | Matria Healthcare, Inc. | Fiber assembly for in vivo plasma separation |
| US5735887A (en) | 1996-12-10 | 1998-04-07 | Exonix Corporation | Closed-loop, RF-coupled implanted medical device |
| JP3455040B2 (ja) | 1996-12-16 | 2003-10-06 | 株式会社日立製作所 | ソースクロック同期式メモリシステムおよびメモリユニット |
| IL120000A0 (en) * | 1997-01-13 | 1997-04-15 | Platzker Jacob | Apparatus for cardiac treatment |
| US5827286A (en) | 1997-02-14 | 1998-10-27 | Incavo; Stephen J. | Incrementally adjustable tibial osteotomy fixation device and method |
| US6185452B1 (en) | 1997-02-26 | 2001-02-06 | Joseph H. Schulman | Battery-powered patient implantable device |
| US6022333A (en) | 1997-05-01 | 2000-02-08 | S.L.I.M. Tech, Ltd. | Method and system for removing materials from lymphatic and other fluids |
| US5938669A (en) | 1997-05-07 | 1999-08-17 | Klasamed S.A. | Adjustable gastric banding device for contracting a patient's stomach |
| US6213979B1 (en) | 1997-05-29 | 2001-04-10 | Venetec International, Inc. | Medical line anchoring system |
| ATE291889T1 (de) | 1997-06-05 | 2005-04-15 | Adiana Inc | Vorrichtung zum verschliessen der eileiter |
| US6003736A (en) | 1997-06-09 | 1999-12-21 | Novo Nordisk A/S | Device for controlled dispensing of a dose of a liquid contained in a cartridge |
| US6332466B1 (en) | 1997-07-08 | 2001-12-25 | Inbae Yoon | Ovarian capsules and methods of surgical contraception by ovarian encapsulation |
| KR20010021797A (ko) | 1997-07-16 | 2001-03-15 | 다비쉬 니심 | 민무늬근 조절기 |
| AU8684098A (en) | 1997-07-31 | 1999-02-22 | Sapphire Communications, Inc. | Means and method for a synchronous network communications system |
| US6135945A (en) | 1997-08-04 | 2000-10-24 | Sultan; Hashem | Anti-incontinence device |
| US5971967A (en) | 1997-08-19 | 1999-10-26 | Abbeymoor Medical, Inc. | Urethral device with anchoring system |
| US5980478A (en) | 1997-10-10 | 1999-11-09 | Transvivo, Inc. | Apparatus and method for the treatment of acute and chronic renal disease by continuous passive plasma ultrafiltration |
| US6409674B1 (en) | 1998-09-24 | 2002-06-25 | Data Sciences International, Inc. | Implantable sensor with wireless communication |
| FR2769491B1 (fr) | 1997-10-15 | 2000-01-07 | Patrick Sangouard | Sphincter artificiel reglable a commande magnetique |
| US5938584A (en) | 1997-11-14 | 1999-08-17 | Cybernetic Medical Systems Corporation | Cavernous nerve stimulation device |
| US20040236877A1 (en) | 1997-12-17 | 2004-11-25 | Lee A. Burton | Switch/network adapter port incorporating shared memory resources selectively accessible by a direct execution logic element and one or more dense logic devices in a fully buffered dual in-line memory module format (FB-DIMM) |
| US6309370B1 (en) | 1998-02-05 | 2001-10-30 | Biosense, Inc. | Intracardiac drug delivery |
| US5995874A (en) | 1998-02-09 | 1999-11-30 | Dew Engineering And Development Limited | Transcutaneous energy transfer device |
| US7468060B2 (en) | 1998-02-19 | 2008-12-23 | Respiratory Diagnostic, Inc. | Systems and methods for treating obesity and other gastrointestinal conditions |
| ES2149091B1 (es) | 1998-03-10 | 2001-05-16 | Gil Vernet Vila Jose Maria | Dispositivo para la fijacion y soporte ajustables en altura de organos anatomicos internos. |
| US6638303B1 (en) | 1998-03-13 | 2003-10-28 | Carbomedics, Inc. | Heart valve prosthesis |
| US6319191B1 (en) | 1998-03-26 | 2001-11-20 | Precision Medical Devices, Inc. | Implantable body fluid flow control device |
| US6095968A (en) | 1998-04-10 | 2000-08-01 | Cardio Technologies, Inc. | Reinforcement device |
| US6099460A (en) | 1998-04-28 | 2000-08-08 | Denker; Stephen | Electromagnetic heart assist technique and apparatus |
| US5910149A (en) | 1998-04-29 | 1999-06-08 | Kuzmak; Lubomyr I. | Non-slipping gastric band |
| US6936060B2 (en) | 1998-05-13 | 2005-08-30 | Arteria Medical Sciences, Inc. | Apparatus and methods for removing emboli during a surgical procedure |
| US6074341A (en) | 1998-06-09 | 2000-06-13 | Timm Medical Technologies, Inc. | Vessel occlusive apparatus and method |
| US6547821B1 (en) * | 1998-07-16 | 2003-04-15 | Cardiothoracic Systems, Inc. | Surgical procedures and devices for increasing cardiac output of the heart |
| US6113574A (en) | 1998-07-27 | 2000-09-05 | Spinello; Ronald P. | Anesthetic injection apparatus and methods |
| US7935409B2 (en) | 1998-08-06 | 2011-05-03 | Kimberly-Clark Worldwide, Inc. | Tissue sheets having improved properties |
| US6102887A (en) | 1998-08-11 | 2000-08-15 | Biocardia, Inc. | Catheter drug delivery system and method for use |
| US6460543B1 (en) | 1998-08-13 | 2002-10-08 | Obtech Medical Ag | Non-injection port food intake restriction device |
| US6067991A (en) | 1998-08-13 | 2000-05-30 | Forsell; Peter | Mechanical food intake restriction device |
| US6210347B1 (en) | 1998-08-13 | 2001-04-03 | Peter Forsell | Remote control food intake restriction device |
| WO2000012152A1 (es) | 1998-08-28 | 2000-03-09 | Juan Hernandez Herrero | Aparato coadyuvante en la dinamica sistolica y diastolica fisiologica de las cavidades cardiacas |
| FR2783153B1 (fr) | 1998-09-14 | 2000-12-01 | Jerome Dargent | Dispositif de constriction gastrique |
| US6638208B1 (en) | 1998-09-15 | 2003-10-28 | Infinite Biomedical Technologies, Llc | Intraurethral continent prothesis |
| US6077215A (en) | 1998-10-08 | 2000-06-20 | Implex Gmbh Spezialhorgerate | Method for coupling an electromechanical transducer of an implantable hearing aid or tinnitus masker to a middle ear ossicle |
| US6275737B1 (en) | 1998-10-14 | 2001-08-14 | Advanced Bionics Corporation | Transcutaneous transmission pouch |
| WO2000025842A1 (en) * | 1998-11-04 | 2000-05-11 | Cardio Technologies, Inc. | Ventricular assist device with pre-formed inflation bladder |
| JP2000148656A (ja) | 1998-11-09 | 2000-05-30 | Mitsubishi Electric Corp | メモリシステム |
| US6134470A (en) | 1998-11-09 | 2000-10-17 | Medtronic, Inc. | Method and apparatus for treating a tachyarrhythmic patient |
| US6964643B2 (en) | 1998-11-18 | 2005-11-15 | Nugyn, Inc. | Devices and methods for treatment of incontinence |
| US6097984A (en) | 1998-11-25 | 2000-08-01 | Medtronic, Inc. | System and method of stimulation for treating gastro-esophageal reflux disease |
| AU760879B2 (en) | 1998-11-25 | 2003-05-22 | United States Surgical Corporation | Biopsy system |
| US6486207B2 (en) | 1998-12-10 | 2002-11-26 | Nexmed (Holdings), Inc. | Compositions and methods for amelioration of human female sexual dysfunction |
| US6309384B1 (en) | 1999-02-01 | 2001-10-30 | Adiana, Inc. | Method and apparatus for tubal occlusion |
| ES2150881B1 (es) | 1999-02-11 | 2002-02-16 | Univ Madrid Complutense | Valvula de accionamiento magnetico externo para un esfinter urinario artificial intrauretral. |
| US6338144B2 (en) | 1999-02-19 | 2002-01-08 | Sun Microsystems, Inc. | Computer system providing low skew clock signals to a synchronous memory unit |
| US6162238A (en) | 1999-02-24 | 2000-12-19 | Aaron V. Kaplan | Apparatus and methods for control of body lumens |
| US6464655B1 (en) * | 1999-03-17 | 2002-10-15 | Environmental Robots, Inc. | Electrically-controllable multi-fingered resilient heart compression devices |
| US6123724A (en) * | 1999-04-14 | 2000-09-26 | Denker; Stephen | Heart assist method and apparatus employing magnetic repulsion force |
| AU4684500A (en) | 1999-04-30 | 2000-11-17 | Uromedica, Inc. | Method and apparatus for adjustable sling for treatment of urinary stress incontinence |
| US6709382B1 (en) | 1999-05-04 | 2004-03-23 | Simon Marcus Horner | Cardiac assist method and apparatus |
| AUPQ090499A0 (en) | 1999-06-10 | 1999-07-01 | Peters, William S | Heart assist device and system |
| AUPQ100699A0 (en) * | 1999-06-17 | 1999-07-08 | Northern Sydney Area Health Service | An assist device for the failing heart |
| US6835200B2 (en) | 1999-06-22 | 2004-12-28 | Ndo Surgical. Inc. | Method and devices for tissue reconfiguration |
| US8574243B2 (en) | 1999-06-25 | 2013-11-05 | Usgi Medical, Inc. | Apparatus and methods for forming and securing gastrointestinal tissue folds |
| US6197055B1 (en) | 1999-07-06 | 2001-03-06 | Herbert L. Matthews | Single chamber mechanical heart |
| US6839393B1 (en) | 1999-07-14 | 2005-01-04 | Rambus Inc. | Apparatus and method for controlling a master/slave system via master device synchronization |
| US6516227B1 (en) | 1999-07-27 | 2003-02-04 | Advanced Bionics Corporation | Rechargeable spinal cord stimulator system |
| AUPQ202699A0 (en) | 1999-08-04 | 1999-08-26 | University Of Melbourne, The | Prosthetic device for incontinence |
| FR2797181B1 (fr) | 1999-08-05 | 2002-05-03 | Richard Cancel | Dispositif telecommande de bande gastrique pour former une ouverture restreinte de stoma dans l'estomac |
| US7674222B2 (en) * | 1999-08-09 | 2010-03-09 | Cardiokinetix, Inc. | Cardiac device and methods of use thereof |
| US20040102804A1 (en) * | 1999-08-10 | 2004-05-27 | Chin Albert K. | Apparatus and methods for endoscopic surgical procedures |
| US6454701B1 (en) | 1999-08-12 | 2002-09-24 | Obtech Medical Ag | Heartburn and reflux disease treatment apparatus with energy transfer device |
| US6482145B1 (en) | 2000-02-14 | 2002-11-19 | Obtech Medical Ag | Hydraulic anal incontinence treatment |
| US6464628B1 (en) | 1999-08-12 | 2002-10-15 | Obtech Medical Ag | Mechanical anal incontinence |
| US6454699B1 (en) | 2000-02-11 | 2002-09-24 | Obtech Medical Ag | Food intake restriction with controlled wireless energy supply |
| US6453907B1 (en) | 1999-08-12 | 2002-09-24 | Obtech Medical Ag | Food intake restriction with energy transfer device |
| CA2379441C (en) | 1999-08-12 | 2009-11-24 | Potencia Medical Ag | Stoma opening forming apparatus |
| US6503189B1 (en) | 1999-08-12 | 2003-01-07 | Obtech Medical Ag | Controlled anal incontinence disease treatment |
| US6454698B1 (en) | 1999-08-12 | 2002-09-24 | Obtech Medical Ag | Anal incontinence treatment with energy transfer device |
| US6471635B1 (en) | 2000-02-10 | 2002-10-29 | Obtech Medical Ag | Anal incontinence disease treatment with controlled wireless energy supply |
| US9814559B1 (en) * | 1999-08-12 | 2017-11-14 | Peter Forsell | Medical implant apparatus with wireless energy transmission |
| US6321282B1 (en) | 1999-10-19 | 2001-11-20 | Rambus Inc. | Apparatus and method for topography dependent signaling |
| US6116193A (en) | 1999-11-05 | 2000-09-12 | Goeckner; Troy C. | Sow breeding saddle |
| FR2802798B1 (fr) | 1999-12-22 | 2002-02-01 | Promedon S A | Sangle a coussinet pour le traitement de l'incontinence urinaire |
| WO2001045590A2 (en) | 1999-12-23 | 2001-06-28 | Percusurge, Inc. | Strut design for an occlusion device |
| US6502161B1 (en) | 2000-01-05 | 2002-12-31 | Rambus Inc. | Memory system including a point-to-point linked memory subsystem |
| US6764472B1 (en) | 2000-01-11 | 2004-07-20 | Bard Access Systems, Inc. | Implantable refillable infusion device |
| US6447443B1 (en) * | 2001-01-13 | 2002-09-10 | Medtronic, Inc. | Method for organ positioning and stabilization |
| US6564105B2 (en) | 2000-01-21 | 2003-05-13 | Medtronic Minimed, Inc. | Method and apparatus for communicating between an ambulatory medical device and a control device via telemetry using randomized data |
| US6600953B2 (en) | 2000-12-11 | 2003-07-29 | Impulse Dynamics N.V. | Acute and chronic electrical signal therapy for obesity |
| AU2001236522A1 (en) | 2000-01-25 | 2001-08-07 | Harridan Medical | Device for preventing fecal incontinence |
| US20030050591A1 (en) | 2000-02-08 | 2003-03-13 | Patrick Mchale Anthony | Loading system and method for using the same |
| US6454700B1 (en) | 2000-02-09 | 2002-09-24 | Obtech Medical Ag | Heartburn and reflux disease treatment apparatus with wireless energy supply |
| EP1598030B1 (en) | 2000-02-10 | 2008-06-25 | Potencia Medical AG | Controlled urinary incontinence treatment |
| BR0108182B1 (pt) | 2000-02-10 | 2010-06-29 | aparelho para o tratamento de incontinência urinária com suprimento de energia sem fio. | |
| ATE490790T1 (de) | 2000-02-10 | 2010-12-15 | Abdomica Ag | Behandlungsapparat für anal-inkontinenz mit drahtloser energieversorgung |
| US6463935B1 (en) | 2000-02-10 | 2002-10-15 | Obtech Medical Ag | Controlled heartburn and reflux disease treatment |
| CN101803965B (zh) | 2000-02-10 | 2014-02-26 | 厄罗洛吉卡股份公司 | 控制小便失禁的治疗 |
| DE60128971T2 (de) | 2000-02-10 | 2008-02-07 | Potencia Medical Ag | Mechanische Vorrichtung zur Impotenzbehandlung |
| US6470892B1 (en) | 2000-02-10 | 2002-10-29 | Obtech Medical Ag | Mechanical heartburn and reflux treatment |
| EP1568338A3 (en) | 2000-02-10 | 2006-11-02 | Potencia Medical AG | Mechanical impotence treatment apparatus |
| MX339106B (es) | 2000-02-11 | 2016-05-12 | Potentica Ag | Aparato para tratamiento de impotencia con medio de transformacion de energia. |
| US6450946B1 (en) | 2000-02-11 | 2002-09-17 | Obtech Medical Ag | Food intake restriction with wireless energy transfer |
| EP1253887B1 (en) | 2000-02-11 | 2007-12-05 | Potencia Medical AG | Controlled impotence treatment |
| US6709385B2 (en) | 2000-02-11 | 2004-03-23 | Obtech Medical Ag | Urinary incontinence treatment apparatus |
| EP1792583A1 (en) * | 2000-02-11 | 2007-06-06 | Potencia Medical AG | Urinary incontinence treatment apparatus |
| EP1259201A2 (en) | 2000-02-11 | 2002-11-27 | Obtech Medical AG | Food intake restriction apparatus with controlled wireless energy supply |
| WO2001047441A2 (en) | 2000-02-14 | 2001-07-05 | Potencia Medical Ag | Penile prosthesis |
| US6953429B2 (en) | 2000-02-14 | 2005-10-11 | Obtech Medical Ag | Hydraulic urinary incontinence treatment apparatus |
| EP1255511B1 (en) | 2000-02-14 | 2006-01-11 | Potencia Medical AG | Male sexual impotence treatment apparatus |
| ATE324087T1 (de) | 2000-02-14 | 2006-05-15 | Potencia Medical Ag | Männliche impotentzprothesevorrichtung mit drahtloser energieversorgung |
| US6475136B1 (en) | 2000-02-14 | 2002-11-05 | Obtech Medical Ag | Hydraulic heartburn and reflux treatment |
| CA2397933C (en) | 2000-02-14 | 2009-06-02 | Potencia Medical Ag | Controlled penile prosthesis |
| US20030100929A1 (en) | 2000-02-14 | 2003-05-29 | Peter Forsell | Controlled penile prosthesis |
| US6471688B1 (en) | 2000-02-15 | 2002-10-29 | Microsolutions, Inc. | Osmotic pump drug delivery systems and methods |
| US6400988B1 (en) | 2000-02-18 | 2002-06-04 | Pacesetter, Inc. | Implantable cardiac device having precision RRT indication |
| JP2001245969A (ja) * | 2000-03-03 | 2001-09-11 | Nipro Corp | 人工心臓および人工心臓駆動手段 |
| ATE295122T1 (de) | 2000-03-16 | 2005-05-15 | Medigus Ltd | Vorrichtung zur fundoplication |
| IL138632A (en) | 2000-09-21 | 2008-06-05 | Minelu Zonnenschein | A multi-eyed endoscope |
| US6215727B1 (en) | 2000-04-04 | 2001-04-10 | Intel Corporation | Method and apparatus for utilizing parallel memory in a serial memory system |
| US6650943B1 (en) | 2000-04-07 | 2003-11-18 | Advanced Bionics Corporation | Fully implantable neurostimulator for cavernous nerve stimulation as a therapy for erectile dysfunction and other sexual dysfunction |
| US6456883B1 (en) * | 2000-04-26 | 2002-09-24 | Medtronic, Inc. | Apparatus and method for allowing immediate retrieval for information and identification from an implantable medical device having a depleted power source |
| US6773428B2 (en) | 2000-05-12 | 2004-08-10 | Stephen M. Zappala | Implantable delivery system and method for the pharmacologic management of erectile dysfunction |
| JP3757757B2 (ja) | 2000-05-18 | 2006-03-22 | 株式会社日立製作所 | リード優先メモリシステム |
| US7530964B2 (en) | 2000-06-30 | 2009-05-12 | Elan Pharma International Limited | Needle device and method thereof |
| US6589229B1 (en) | 2000-07-31 | 2003-07-08 | Becton, Dickinson And Company | Wearable, self-contained drug infusion device |
| US6746461B2 (en) | 2000-08-15 | 2004-06-08 | William R. Fry | Low-profile, shape-memory surgical occluder |
| US6862479B1 (en) | 2000-08-30 | 2005-03-01 | Advanced Bionics Corporation | Spinal cord stimulation as a therapy for sexual dysfunction |
| US6592515B2 (en) | 2000-09-07 | 2003-07-15 | Ams Research Corporation | Implantable article and method |
| US20020040208A1 (en) | 2000-10-04 | 2002-04-04 | Flaherty J. Christopher | Data collection assembly for patient infusion system |
| US6591137B1 (en) | 2000-11-09 | 2003-07-08 | Neuropace, Inc. | Implantable neuromuscular stimulator for the treatment of gastrointestinal disorders |
| DE60132507T2 (de) | 2000-11-09 | 2008-12-24 | Insulet Corp., Beverly | Gerät zur transkutanen Abgabe von Medikamenten |
| US6602182B1 (en) * | 2000-11-28 | 2003-08-05 | Abiomed, Inc. | Cardiac assistance systems having multiple fluid plenums |
| TW458771B (en) | 2000-12-13 | 2001-10-11 | Jiang R Chung | Structure of blood-propelling cavity of artificial left ventricle |
| US6659973B2 (en) | 2001-01-04 | 2003-12-09 | Transvivo, Inc. | Apparatus and method for in-vivo plasmapheresis using periodic backflush |
| US6612977B2 (en) | 2001-01-23 | 2003-09-02 | American Medical Systems Inc. | Sling delivery system and method of use |
| WO2002082968A2 (en) | 2001-04-18 | 2002-10-24 | Impulse Dynamics Nv | Analysis of eating habits |
| US6516282B2 (en) | 2001-04-19 | 2003-02-04 | Ge Medical Systems Global Technology Company | Predictive thermal control used with a vacuum enclosed coil assembly of a magnetic resonance imaging device |
| US20050240229A1 (en) | 2001-04-26 | 2005-10-27 | Whitehurst Tood K | Methods and systems for stimulation as a therapy for erectile dysfunction |
| US20050182389A1 (en) * | 2001-04-30 | 2005-08-18 | Medtronic, Inc | Implantable medical device and patch system and method of use |
| US6535764B2 (en) | 2001-05-01 | 2003-03-18 | Intrapace, Inc. | Gastric treatment and diagnosis device and method |
| US7756582B2 (en) | 2001-05-01 | 2010-07-13 | Intrapace, Inc. | Gastric stimulation anchor and method |
| US7020531B1 (en) | 2001-05-01 | 2006-03-28 | Intrapace, Inc. | Gastric device and suction assisted method for implanting a device on a stomach wall |
| US6623507B2 (en) | 2001-05-07 | 2003-09-23 | Fathy M.A. Saleh | Vascular filtration device |
| DE10123769C1 (de) | 2001-05-16 | 2002-12-12 | Infineon Technologies Ag | Verfahren zur Anpassung unterschiedlicher Signallaufzeiten zwischen einer Steuerung und wenigstens zweier Verarbeitungseinheiten sowie Rechnersystem |
| US6626821B1 (en) * | 2001-05-22 | 2003-09-30 | Abiomed, Inc. | Flow-balanced cardiac wrap |
| US6678561B2 (en) | 2001-05-23 | 2004-01-13 | Surgical Development Ag | Heartburn and reflux disease treatment apparatus |
| US6551235B2 (en) | 2001-06-28 | 2003-04-22 | Potencia Medical Ag | Implantable pump |
| SE0102312D0 (sv) | 2001-06-28 | 2001-06-28 | Obtech Medical Ag | Urinary dysfunction treatment apparatus |
| SE0102313D0 (sv) | 2001-06-28 | 2001-06-28 | Obtech Medical Ag | Intestine dysfunction treatment apparatus |
| US6796963B2 (en) | 2001-07-10 | 2004-09-28 | Myocardial Therapeutics, Inc. | Flexible tissue injection catheters with controlled depth penetration |
| KR100407467B1 (ko) | 2001-07-12 | 2003-11-28 | 최수봉 | 리모컨 방식의 인슐린 자동주사기 |
| US6901295B2 (en) | 2001-07-14 | 2005-05-31 | Virender K. Sharma | Method and apparatus for electrical stimulation of the lower esophageal sphincter |
| US6627206B2 (en) | 2001-07-25 | 2003-09-30 | Greg A. Lloyd | Method and apparatus for treating obesity and for delivering time-released medicaments |
| JP4883852B2 (ja) | 2001-07-30 | 2012-02-22 | 日東電工株式会社 | 加熱剥離型粘着シートからのチップ切断片の加熱剥離方法 |
| US6928338B1 (en) | 2001-08-10 | 2005-08-09 | Medtronic, Inc. | Decision information system for drug delivery devices |
| US20030208247A1 (en) | 2001-09-28 | 2003-11-06 | Michele Spinelli | Implantable stimulation lead with tissue in-growth anchor |
| FR2830455B1 (fr) | 2001-10-09 | 2004-06-25 | Saphir Medical | Catheter a outil d'extremite perforant ou piquant retractable |
| WO2003033054A1 (en) | 2001-10-17 | 2003-04-24 | Transvivo, Inc. | Plasmapheresis filter device and apparatus for therapeutic apheresis |
| US7429258B2 (en) | 2001-10-26 | 2008-09-30 | Massachusetts Institute Of Technology | Microneedle transport device |
| CA2476473C (en) | 2002-02-21 | 2013-02-19 | Design Mentor, Inc. | Fluid pump |
| US7311690B2 (en) * | 2002-02-25 | 2007-12-25 | Novashunt Ag | Implantable fluid management system for the removal of excess fluid |
| US7003684B2 (en) | 2002-03-27 | 2006-02-21 | Via Technologies, Inc. | Memory control chip, control method and control circuit |
| US7043295B2 (en) | 2002-04-26 | 2006-05-09 | Medtronic, Inc. | Methods and apparatus for delivering a drug influencing appetite for treatment of eating disorders |
| US6960233B1 (en) | 2002-12-10 | 2005-11-01 | Torax Medical, Inc. | Methods and apparatus for improving the function of biological passages |
| JP3866618B2 (ja) | 2002-06-13 | 2007-01-10 | エルピーダメモリ株式会社 | メモリシステム及びその制御方法 |
| US7998190B2 (en) | 2002-06-17 | 2011-08-16 | California Institute Of Technology | Intravascular miniature stent pump |
| US20040024285A1 (en) | 2002-06-21 | 2004-02-05 | Helmut Muckter | Blood pump with impeller |
| US20050238506A1 (en) | 2002-06-21 | 2005-10-27 | The Charles Stark Draper Laboratory, Inc. | Electromagnetically-actuated microfluidic flow regulators and related applications |
| WO2004002364A2 (en) * | 2002-06-27 | 2004-01-08 | Levine Robert A | Ventricular remodeling for artioventricular valve regurgitation |
| US20040015041A1 (en) | 2002-07-18 | 2004-01-22 | The University Of Cincinnati | Protective sheath apparatus and method for use with a heart wall actuation system for the natural heart |
| US7250037B2 (en) | 2002-07-22 | 2007-07-31 | Becton, Dickinson And Company | Patch-like infusion device |
| US20040034275A1 (en) | 2002-07-29 | 2004-02-19 | Peter Forsell | Multi-material incontinence treatment constriction device |
| ATE496651T1 (de) | 2002-08-02 | 2011-02-15 | Prosthesica Ag | Gerät zur verteilung von flüssigkeit im körper eines patienten |
| US6772011B2 (en) | 2002-08-20 | 2004-08-03 | Thoratec Corporation | Transmission of information from an implanted medical device |
| US7214233B2 (en) | 2002-08-30 | 2007-05-08 | Satiety, Inc. | Methods and devices for maintaining a space occupying device in a relatively fixed location within a stomach |
| EP1403519A1 (en) | 2002-09-27 | 2004-03-31 | Novo Nordisk A/S | Membrane pump with stretchable pump membrane |
| US20040064110A1 (en) | 2002-10-01 | 2004-04-01 | Peter Forsell | Injection port |
| US7103418B2 (en) | 2002-10-02 | 2006-09-05 | Medtronic, Inc. | Active fluid delivery catheter |
| US20040087886A1 (en) * | 2002-10-30 | 2004-05-06 | Scimed Life Systems, Inc. | Linearly expandable ureteral stent |
| US20040098545A1 (en) | 2002-11-15 | 2004-05-20 | Pline Steven L. | Transferring data in selectable transfer modes |
| US7141071B2 (en) | 2002-12-23 | 2006-11-28 | Python Medical, Inc. | Implantable digestive tract organ |
| US7037343B2 (en) | 2002-12-23 | 2006-05-02 | Python, Inc. | Stomach prosthesis |
| US20060142637A1 (en) | 2003-01-06 | 2006-06-29 | Atamjit Gill | Surgical instrument for the treatment of female urinary incontinence and methods of use |
| US6826663B2 (en) | 2003-01-13 | 2004-11-30 | Rambus Inc. | Coded write masking |
| ATE378024T1 (de) | 2003-01-31 | 2007-11-15 | Potencia Medical Ag | Vorrichtung zur impotenzbehandlung mit anschlussvorrichtung |
| ATE356595T1 (de) | 2003-01-31 | 2007-04-15 | Potencia Medical Ag | Elektrisch bedienbare vorrichtung zur impotenzbehandlung |
| ATE356598T1 (de) | 2003-01-31 | 2007-04-15 | Potencia Medical Ag | Elektrisch bedienbare vorrichtung zur inkontinenzbehandlung |
| WO2004066880A1 (en) | 2003-01-31 | 2004-08-12 | Potencia Medical Ag | Careful impotence treatment apparatus |
| EP1587465B1 (en) | 2003-01-31 | 2007-11-14 | Potencia Medical AG | Incontinence treatment apparatus with connection device |
| US7371208B2 (en) | 2003-01-31 | 2008-05-13 | Potencia Medical Ag | Careful incontinence treatment apparatus |
| US7844338B2 (en) | 2003-02-03 | 2010-11-30 | Enteromedics Inc. | High frequency obesity treatment |
| GB0303432D0 (en) | 2003-02-14 | 2003-03-19 | Council Cent Lab Res Councils | Self-cleaning tube |
| US7118525B2 (en) | 2003-04-23 | 2006-10-10 | Coleman Edward J | Implantable cardiac assist device |
| CA2428741A1 (en) | 2003-05-13 | 2004-11-13 | Cardianove Inc. | Dual inlet mixed-flow blood pump |
| DE112004000821B4 (de) | 2003-05-13 | 2016-12-01 | Advanced Micro Devices, Inc. | System mit einem Hauptrechner, der mit mehreren Speichermodulen über eine serielle Speicherverbindung verbunden ist |
| US7217236B2 (en) | 2003-05-30 | 2007-05-15 | Innovamedica S.A. De C.V. | Universal pneumatic ventricular assist device |
| US7165153B2 (en) | 2003-06-04 | 2007-01-16 | Intel Corporation | Memory channel with unidirectional links |
| US7338517B2 (en) | 2003-06-04 | 2008-03-04 | University Of South Carolina | Tissue scaffold having aligned fibrils and artificial tissue comprising the same |
| TW590007U (en) | 2003-06-06 | 2004-06-01 | Univ Tamkang | Tri-leaflet mechanical heart valve |
| JP4076478B2 (ja) * | 2003-06-12 | 2008-04-16 | テルモ株式会社 | 人工心臓ポンプシステム |
| US7201757B2 (en) | 2003-06-20 | 2007-04-10 | Enteromedics Inc. | Gastro-esophageal reflux disease (GERD) treatment method and apparatus |
| US7494459B2 (en) * | 2003-06-26 | 2009-02-24 | Biophan Technologies, Inc. | Sensor-equipped and algorithm-controlled direct mechanical ventricular assist device |
| EP1646332B1 (en) | 2003-07-18 | 2015-06-17 | Edwards Lifesciences AG | Remotely activated mitral annuloplasty system |
| US8140168B2 (en) | 2003-10-02 | 2012-03-20 | Medtronic, Inc. | External power source for an implantable medical device having an adjustable carrier frequency and system and method related therefore |
| WO2005034718A2 (en) * | 2003-10-15 | 2005-04-21 | Eli Bar | Amplification-based cardiac assist device |
| CA2557583A1 (en) | 2004-01-20 | 2005-08-11 | Massachusetts General Hospital | Permanent thrombus filtering stent |
| US20050161377A1 (en) | 2004-01-23 | 2005-07-28 | Fuji Photo Film Co., Ltd. | Extraction system |
| CN1937976B (zh) | 2004-02-02 | 2011-12-07 | 孕体有限公司 | 一种用于避孕的增强组织向内生长的装置 |
| US8052669B2 (en) | 2004-02-25 | 2011-11-08 | Femasys Inc. | Methods and devices for delivery of compositions to conduits |
| US20060129028A1 (en) | 2004-03-31 | 2006-06-15 | Krakousky Alexander A | Potency package |
| US7993397B2 (en) | 2004-04-05 | 2011-08-09 | Edwards Lifesciences Ag | Remotely adjustable coronary sinus implant |
| US7717843B2 (en) | 2004-04-26 | 2010-05-18 | Barosense, Inc. | Restrictive and/or obstructive implant for inducing weight loss |
| US20050245957A1 (en) | 2004-04-30 | 2005-11-03 | Medtronic, Inc. | Biasing stretch receptors in stomach wall to treat obesity |
| US8066780B2 (en) | 2004-05-03 | 2011-11-29 | Fulfillium, Inc. | Methods for gastric volume control |
| US7556645B2 (en) | 2004-05-05 | 2009-07-07 | Direct Flow Medical, Inc. | Translumenally implantable heart valve with formed in place support |
| US6949067B1 (en) | 2004-05-11 | 2005-09-27 | Dann Jeffrey A | Device and method for enhancing female sexual stimulation |
| US7222224B2 (en) | 2004-05-21 | 2007-05-22 | Rambus Inc. | System and method for improving performance in computer memory systems supporting multiple memory access latencies |
| US7112186B2 (en) | 2004-05-26 | 2006-09-26 | Shah Tilak M | Gastro-occlusive device |
| US20050266042A1 (en) | 2004-05-27 | 2005-12-01 | Medtronic Vascular, Inc. | Methods and apparatus for treatment of aneurysmal tissue |
| US7516029B2 (en) | 2004-06-09 | 2009-04-07 | Rambus, Inc. | Communication channel calibration using feedback |
| KR100643605B1 (ko) | 2004-08-16 | 2006-11-10 | 삼성전자주식회사 | 적응형 프리 엠퍼시스 장치, 데이터 통신용 송신기,데이터 통신용 송수신 장치 및 적응형 프리 엠퍼시스 방법 |
| KR100599986B1 (ko) * | 2004-10-23 | 2006-07-13 | 고려대학교 산학협력단 | 혈액 펌프 구동기 및 이를 구비하는 혈액 펌프 시스템 |
| CA2583902A1 (en) | 2004-10-28 | 2006-05-11 | Pall Corporation | Valve |
| US20060161217A1 (en) | 2004-12-21 | 2006-07-20 | Jaax Kristen N | Methods and systems for treating obesity |
| US20060149129A1 (en) | 2005-01-05 | 2006-07-06 | Watts H D | Catheter with multiple visual elements |
| US7601162B2 (en) | 2005-01-14 | 2009-10-13 | Ethicon Endo-Surgery, Inc. | Actuator for an implantable band |
| US7963989B2 (en) | 2005-01-24 | 2011-06-21 | Technology Advancement Group, Inc. | Implantable prosthetic device for connection to a fluid flow pathway of a patient |
| EP1841368B1 (en) | 2005-01-25 | 2015-06-10 | Covidien LP | Structures for permanent occlusion of a hollow anatomical structure |
| US7669601B2 (en) | 2005-02-15 | 2010-03-02 | Tal Michael G | Intrauterine fallopian tube occlusion device and method for use |
| US7955344B2 (en) | 2005-04-01 | 2011-06-07 | Nexgen Medical Systems, Inc. | Thrombus removal system and process |
| US7801602B2 (en) | 2005-04-08 | 2010-09-21 | Boston Scientific Neuromodulation Corporation | Controlling stimulation parameters of implanted tissue stimulators |
| CA2507142A1 (en) | 2005-04-25 | 2006-10-25 | Mohammad Nadeem Qadir | Apparatus, devices and methods for contraception, conception and pregnancy |
| US7984717B2 (en) | 2005-04-29 | 2011-07-26 | Medtronic, Inc. | Devices for augmentation of lumen walls |
| KR100588599B1 (ko) | 2005-05-03 | 2006-06-14 | 삼성전자주식회사 | 메모리 모듈 및 메모리 시스템 |
| US7641649B2 (en) | 2005-05-06 | 2010-01-05 | Medtronic Minimed, Inc. | Reservoir support and method for infusion device |
| ATE529076T1 (de) | 2005-05-11 | 2011-11-15 | Univ Texas | Vorrichtung zur behandlung von fettleibigkeit |
| WO2006126653A1 (ja) | 2005-05-27 | 2006-11-30 | Olympus Corporation | 被検体内導入装置 |
| DE102005027809A1 (de) | 2005-06-15 | 2006-12-28 | Q Medial International Ag | Verschließeinrichtung für Hohlorgane |
| US7988614B2 (en) * | 2005-07-19 | 2011-08-02 | Zvi Ben Shalom | Organ assist system and method |
| CA2618371A1 (en) | 2005-08-11 | 2007-02-15 | Adrian Paz | Implantable device for obesity prevention |
| US20070038232A1 (en) | 2005-08-12 | 2007-02-15 | Kraemer Stefan J M | Apparatus and method for securing the stomach to the diaphragm for use, for example, in treating hiatal hernias and gastroesophageal reflux disease |
| US7699769B2 (en) | 2005-09-01 | 2010-04-20 | Boston Scientific Scimed, Inc. | Adjustable surgical sling |
| WO2007041795A1 (en) | 2005-10-14 | 2007-04-19 | Continence Control Systems International Pty Ltd | A method and apparatus for treating fecal incontinence |
| US8118750B2 (en) | 2005-10-21 | 2012-02-21 | Medtronic, Inc. | Flow sensors for penile tumescence |
| AU2006310807B2 (en) | 2005-11-02 | 2012-08-02 | Medicaltree Patent Ltd | Implantable infusion device with advanceable and retractable needle |
| US7558124B2 (en) | 2005-11-16 | 2009-07-07 | Montage Technology Group, Ltd | Memory interface to bridge memory buses |
| US7577039B2 (en) | 2005-11-16 | 2009-08-18 | Montage Technology Group, Ltd. | Memory interface to bridge memory buses |
| US7368950B2 (en) | 2005-11-16 | 2008-05-06 | Montage Technology Group Limited | High speed transceiver with low power consumption |
| US7720547B2 (en) | 2006-01-04 | 2010-05-18 | Kenergy, Inc. | Extracorporeal power supply with a wireless feedback system for an implanted medical device |
| WO2007089500A2 (en) * | 2006-01-30 | 2007-08-09 | Pong-Jeu Lu | Dual-pulsation bi-ventricular assist device |
| US20070193632A1 (en) | 2006-02-21 | 2007-08-23 | Jianchao Shu | Artificial heart valve and rotary pressure porting mechanisms |
| US8195296B2 (en) | 2006-03-03 | 2012-06-05 | Ams Research Corporation | Apparatus for treating stress and urge incontinence |
| WO2007109759A2 (en) | 2006-03-22 | 2007-09-27 | C. R. Bard, Inc. | Female urinary incontinence treatment device and method |
| US8070768B2 (en) | 2006-04-19 | 2011-12-06 | Vibrynt, Inc. | Devices and methods for treatment of obesity |
| WO2007124128A2 (en) | 2006-04-20 | 2007-11-01 | Liquidia Technologies, Inc. | Biological vessel flow control devices and methods |
| US20070265675A1 (en) | 2006-05-09 | 2007-11-15 | Ams Research Corporation | Testing Efficacy of Therapeutic Mechanical or Electrical Nerve or Muscle Stimulation |
| US8160709B2 (en) | 2006-05-18 | 2012-04-17 | Endostim, Inc. | Use of electrical stimulation of the lower esophageal sphincter to modulate lower esophageal sphincter pressure |
| US7991476B2 (en) | 2006-05-22 | 2011-08-02 | Empire Bio-Medical Devices, Inc. | Method and device for enhanced blood flow |
| CA2687114C (en) * | 2006-05-31 | 2014-01-14 | Richard Wampler | Heart assist device |
| US7841977B2 (en) * | 2006-06-22 | 2010-11-30 | Matthias Vaska | Devices and methods for absorbing, transferring and delivering heart energy |
| WO2007149555A2 (en) | 2006-06-22 | 2007-12-27 | Ams Research Corporation | Adjustable tension incontinence sling assemblies |
| US7828715B2 (en) | 2006-06-29 | 2010-11-09 | Ams Research Corporation | Method of treating anal incontinence |
| US8075471B2 (en) | 2006-07-12 | 2011-12-13 | Allegheny-Singer Research Institute | Apical torsion device for cardiac assist |
| US7455663B2 (en) | 2006-08-23 | 2008-11-25 | Medtronic Minimed, Inc. | Infusion medium delivery system, device and method with needle inserter and needle inserter device and method |
| US7738961B2 (en) | 2006-10-09 | 2010-06-15 | Endostim, Inc. | Method and apparatus for treatment of the gastrointestinal tract |
| US7749235B2 (en) | 2006-10-20 | 2010-07-06 | Ethicon Endo-Surgery, Inc. | Stomach invagination method and apparatus |
| US20080103544A1 (en) | 2006-10-28 | 2008-05-01 | Weiner Richard L | Method of treating female sexual dysfunction |
| FR2908979A1 (fr) | 2006-11-28 | 2008-05-30 | Saidi Abdelkader | Dispositif implantable pour perfusion intra-caverneuse dans le traitement de la dysfonction eriectile. |
| US7846160B2 (en) | 2006-12-21 | 2010-12-07 | Cytyc Corporation | Method and apparatus for sterilization |
| WO2008108100A1 (ja) * | 2007-03-05 | 2008-09-12 | Jms Co., Ltd. | 補助人工心臓装置 |
| US8469908B2 (en) | 2007-04-06 | 2013-06-25 | Wilson T. Asfora | Analgesic implant device and system |
| US9259233B2 (en) | 2007-04-06 | 2016-02-16 | Hologic, Inc. | Method and device for distending a gynecological cavity |
| JP2010524635A (ja) | 2007-04-28 | 2010-07-22 | ザ ボード オブ トラスティーズ オブ ザ リーランド スタンフォード ジュニア ユニバーシティ | 動的および調整可能な支持機器 |
| WO2008135988A2 (en) | 2007-05-03 | 2008-11-13 | Leviticus-Cardio Ltd. | Permanent ventricular assist device for treating heart failure |
| GB0713864D0 (en) | 2007-07-17 | 2007-08-29 | Sheppard & Charnley Ltd | Electric motor/generator assembly |
| US8696543B2 (en) | 2007-10-11 | 2014-04-15 | Kirk Promotion Ltd. | Method for controlling flow of intestinal contents in a patient's intestines |
| US20090248033A1 (en) | 2007-10-11 | 2009-10-01 | Milux Holding S.A. | Method for the treatment of gallstones |
| US10195325B2 (en) | 2007-10-11 | 2019-02-05 | Peter Forsell | Method for controlling flow of sperms in a uterine tube |
| US8795153B2 (en) | 2007-10-11 | 2014-08-05 | Peter Forsell | Method for treating female sexual dysfunction |
| US9555241B2 (en) | 2007-10-11 | 2017-01-31 | Peter Forsell | Method of obtaining male contraception |
| US9949871B2 (en) | 2007-10-11 | 2018-04-24 | Peter Forsell | Method for controlling flow of eggs in a uterine tube |
| EP3868335A1 (en) | 2007-10-11 | 2021-08-25 | Implantica Patent Ltd. | Apparatus for controlling flow in a bodily organ |
| US10307597B2 (en) | 2007-10-11 | 2019-06-04 | Peter Forsell | Method for controlling flow of urine in a patient's urethra, ureter, renal pelvis or bladder |
| US8992409B2 (en) | 2007-10-11 | 2015-03-31 | Peter Forsell | Method for controlling flow in a bodily organ |
| US20090177028A1 (en) * | 2008-01-04 | 2009-07-09 | Anthony John White | Non-blood contact cardiac compression device, for augmentation of cardiac function by timed cyclic tensioning of elastic cords in an epicardial location |
| WO2009096854A1 (en) | 2008-01-28 | 2009-08-06 | Milux Holding Sa | An implantable fluid movement device |
| CA2999337C (en) | 2008-01-28 | 2023-03-07 | Implantica Patent Ltd. | An implantable drainage device |
| CA2749782C (en) | 2008-01-29 | 2021-06-15 | Milux Holding S.A. | Apparatus for treating obesity |
| US7844342B2 (en) | 2008-02-07 | 2010-11-30 | Ethicon Endo-Surgery, Inc. | Powering implantable restriction systems using light |
| FI123247B (fi) | 2008-03-19 | 2013-01-15 | Aalto Korkeakoulusaeaetioe | Kehon sisäinen luudistraktiolaite |
| US7987853B2 (en) | 2008-04-25 | 2011-08-02 | Conceptus, Inc. | Devices and methods for occluding a fallopian tube |
| JP2010025600A (ja) * | 2008-07-15 | 2010-02-04 | Sanyo Electric Co Ltd | ビーム照射装置 |
| CA2776473C (en) | 2008-10-10 | 2022-01-04 | Peter Forsell | Implantable device for internal urinary control |
| US8475355B2 (en) | 2008-10-10 | 2013-07-02 | Milux Holding S.A. | Heart help device, system, and method |
| EP2349076B1 (en) | 2008-10-10 | 2018-06-13 | Kirk Promotion LTD. | A system, an apparatus for treating a sexual dysfunctional female patient |
| CA2776475A1 (en) | 2008-10-10 | 2010-04-15 | Peter Forsell | An improved artificial valve |
| US8874215B2 (en) | 2008-10-10 | 2014-10-28 | Peter Forsell | System, an apparatus, and a method for treating a sexual dysfunctional female patient |
| WO2010042060A1 (en) | 2008-10-10 | 2010-04-15 | Milux Holding S.A. | An improved artificial valve |
| WO2010042008A1 (en) | 2008-10-10 | 2010-04-15 | Milux Holding Sa | Heart help pump, system, and method |
| HUE056076T2 (hu) | 2008-10-10 | 2022-01-28 | Medicaltree Patent Ltd | Szívsegítõ készülék és rendszer |
| CA2776450C (en) | 2008-10-10 | 2018-08-21 | Peter Forsell | Heart help device, system, and method |
| DK2349106T3 (en) | 2008-10-10 | 2017-04-24 | Kirk Promotion Ltd | System for the treatment of sexual dysfunction in men. |
| WO2010042046A1 (en) | 2008-10-10 | 2010-04-15 | Milux Holding S.A. | Apparatus, system and operation method for the treatment of female sexual dysfunction |
| EP3851076A1 (en) | 2008-10-10 | 2021-07-21 | MedicalTree Patent Ltd. | An improved artificial valve |
| EP2349083B1 (en) | 2008-10-10 | 2020-06-17 | Implantica Patent Ltd. | Artificial stomach |
| US10668196B2 (en) | 2008-10-10 | 2020-06-02 | Peter Forsell | Heart assisting device |
| JP2012505021A (ja) | 2008-10-10 | 2012-03-01 | ミルックス・ホールディング・エスエイ | 男性用の一時的避妊装置 |
| EP4091579A1 (en) | 2008-10-10 | 2022-11-23 | Implantica Patent Ltd. | Variable sling for urinary incontinence |
| AU2009302955B2 (en) | 2008-10-10 | 2017-01-05 | Implantica Patent Ltd. | Fastening means for implantable medical control assembly |
| AU2009310439B2 (en) | 2008-10-31 | 2016-05-26 | Implantica Patent Ltd. | Device and method for bone adjustment with anchoring function |
| CN102365065B (zh) | 2009-01-29 | 2014-10-22 | 米卢克斯控股股份有限公司 | 肥胖症的治疗 |
| WO2010118178A2 (en) | 2009-04-07 | 2010-10-14 | Garfield Robert E | Uterine electrical stimulation system and method |
| US9949812B2 (en) | 2009-07-17 | 2018-04-24 | Peter Forsell | Vaginal operation method for the treatment of anal incontinence in women |
| US10952836B2 (en) | 2009-07-17 | 2021-03-23 | Peter Forsell | Vaginal operation method for the treatment of urinary incontinence in women |
| ITMC20120006A1 (it) | 2012-01-26 | 2013-07-27 | Si Gi Impianti Elettrici Di Silenz I Gianluca E S | Sistema di luci ad effetti sincronizzati. |
-
2009
- 2009-10-12 CA CA2776450A patent/CA2776450C/en active Active
- 2009-10-12 EP EP23176987.8A patent/EP4282462A3/en active Pending
- 2009-10-12 US US13/123,402 patent/US20110196484A1/en active Pending
- 2009-10-12 US US13/123,436 patent/US10583234B2/en active Active
- 2009-10-12 JP JP2011530988A patent/JP5395183B2/ja active Active
- 2009-10-12 US US13/123,394 patent/US8509894B2/en active Active
- 2009-10-12 WO PCT/SE2009/000451 patent/WO2010042014A1/en active Application Filing
- 2009-10-12 EP EP09819472.3A patent/EP2349385B1/en active Active
- 2009-10-12 CA CA3004121A patent/CA3004121C/en active Active
- 2009-10-12 WO PCT/SE2009/000459 patent/WO2010042022A1/en active Application Filing
- 2009-10-12 AU AU2009302945A patent/AU2009302945C1/en active Active
- 2009-10-12 CN CN200980149795.XA patent/CN102245225B/zh active Active
- 2009-10-12 ES ES09819476T patent/ES2950024T3/es active Active
- 2009-10-12 CA CA3004075A patent/CA3004075C/en active Active
- 2009-10-12 EP EP09819476.4A patent/EP2349386B1/en active Active
- 2009-10-12 CN CN201510494805.0A patent/CN105079898B/zh active Active
- 2009-10-12 WO PCT/SE2009/000455 patent/WO2010042018A1/en active Application Filing
- 2009-10-12 WO PCT/SE2009/000441 patent/WO2010042006A1/en active Application Filing
-
2013
- 2013-10-17 JP JP2013216383A patent/JP5894134B2/ja active Active
-
2016
- 2016-01-29 AU AU2016200523A patent/AU2016200523B2/en active Active
- 2016-02-25 JP JP2016033883A patent/JP6082142B2/ja active Active
-
2017
- 2017-01-19 JP JP2017007457A patent/JP6298184B2/ja active Active
-
2018
- 2018-01-02 AU AU2018200036A patent/AU2018200036B2/en active Active
- 2018-02-22 JP JP2018029588A patent/JP6674491B2/ja active Active
-
2019
- 2019-09-20 AU AU2019232924A patent/AU2019232924B2/en active Active
-
2020
- 2020-03-09 US US16/812,404 patent/US11331468B2/en active Active
-
2021
- 2021-03-10 AU AU2021201538A patent/AU2021201538B2/en active Active
-
2023
- 2023-02-03 AU AU2023200561A patent/AU2023200561A1/en active Pending
- 2023-08-25 JP JP2023137075A patent/JP2023153386A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0614961B2 (ja) * | 1987-02-27 | 1994-03-02 | ヴァスコー インコーポレイテッド | 生体適合性心室補助および不整脈制御装置 |
| JPH09500549A (ja) * | 1993-05-27 | 1997-01-21 | フラウンホッファー−ゲゼルシャフト ツァ フェルダールング デァ アンゲヴァンテン フォアシュンク エー.ファオ. | 心臓の機能を補助するための装置 |
| JP2002527158A (ja) * | 1998-10-15 | 2002-08-27 | カーディオ・テクノロジーズ・インコーポレーテッド | 心臓支援装置と併用するための受動除細動電極 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016509917A (ja) * | 2013-03-15 | 2016-04-04 | ミルックス・ホールディング・エスエイ | 電気モータ及び歯車系を備える操作可能なインプラント |
| JP2018202241A (ja) * | 2013-03-15 | 2018-12-27 | インプランティカ・パテント・リミテッド | 電気モータ及び歯車系を備える操作可能なインプラント |
| JP2020116464A (ja) * | 2013-03-15 | 2020-08-06 | インプランティカ・パテント・リミテッド | 電気モータ及び歯車系を備える操作可能なインプラント |
| JP2022009641A (ja) * | 2013-03-15 | 2022-01-14 | インプランティカ・パテント・リミテッド | 電気モータ及び歯車系を備える操作可能なインプラント |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6298184B2 (ja) | 心臓支援デバイスおよびシステム | |
| US20210196942A1 (en) | Heart help device system and method | |
| US8475355B2 (en) | Heart help device, system, and method | |
| US10668196B2 (en) | Heart assisting device | |
| AU2019246900A1 (en) | Heart help device, system, and method | |
| US20230310814A1 (en) | Heart help device, system, and method | |
| JP2020089762A (ja) | 心臓支援デバイスおよびシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121012 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121012 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130913 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131017 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5395183 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |