JP2012241585A - 作業機械のエンジン制御装置およびそのエンジン制御方法 - Google Patents
作業機械のエンジン制御装置およびそのエンジン制御方法 Download PDFInfo
- Publication number
- JP2012241585A JP2012241585A JP2011111387A JP2011111387A JP2012241585A JP 2012241585 A JP2012241585 A JP 2012241585A JP 2011111387 A JP2011111387 A JP 2011111387A JP 2011111387 A JP2011111387 A JP 2011111387A JP 2012241585 A JP2012241585 A JP 2012241585A
- Authority
- JP
- Japan
- Prior art keywords
- engine
- speed
- output
- matching
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 7
- 238000001514 detection method Methods 0.000 claims description 20
- 238000006073 displacement reaction Methods 0.000 claims description 9
- 230000003247 decreasing effect Effects 0.000 claims description 5
- 239000000446 fuel Substances 0.000 abstract description 59
- 238000010521 absorption reaction Methods 0.000 description 37
- 238000010586 diagram Methods 0.000 description 37
- 238000010248 power generation Methods 0.000 description 31
- 238000006243 chemical reaction Methods 0.000 description 17
- 239000010720 hydraulic oil Substances 0.000 description 14
- 239000003990 capacitor Substances 0.000 description 11
- 238000002347 injection Methods 0.000 description 7
- 239000007924 injection Substances 0.000 description 7
- 238000009412 basement excavation Methods 0.000 description 6
- 230000007704 transition Effects 0.000 description 5
- 230000009467 reduction Effects 0.000 description 4
- 238000007562 laser obscuration time method Methods 0.000 description 3
- 239000004576 sand Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 239000002828 fuel tank Substances 0.000 description 2
- 230000004043 responsiveness Effects 0.000 description 2
- 239000011435 rock Substances 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 210000005252 bulbus oculi Anatomy 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 229910052987 metal hydride Inorganic materials 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- -1 nickel metal hydride Chemical class 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 230000008929 regeneration Effects 0.000 description 1
- 238000011069 regeneration method Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images


























Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/04—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D31/00—Use of speed-sensing governors to control combustion engines, not otherwise provided for
- F02D31/001—Electric control of rotation speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D31/00—Use of speed-sensing governors to control combustion engines, not otherwise provided for
- F02D31/001—Electric control of rotation speed
- F02D31/007—Electric control of rotation speed controlling fuel supply
- F02D31/008—Electric control of rotation speed controlling fuel supply for idle speed control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/0205—Circuit arrangements for generating control signals using an auxiliary engine speed control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/04—Introducing corrections for particular operating conditions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/04—Introducing corrections for particular operating conditions
- F02D41/08—Introducing corrections for particular operating conditions for idling
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Operation Control Of Excavators (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
【解決手段】作業機械の運転状態を検出する検出手段と、前記運転状態をもとに、作業機械の負荷が抜けた場合に最大限上げられるエンジンの回転数である無負荷最大回転数np2を演算する無負荷最大回転数演算手段と、前記運転状態をもとに、作業機械に負荷が加わった場合に上げられるエンジンの回転数である目標マッチング回転数np1を前記無負荷最大回転数とは別に演算する目標マッチング回転数演算手段と、前記運転状態をもとに、最大限出力することができるエンジン目標出力ELを演算するエンジン目標出力演算手段と、エンジン目標出力ELの制限下で、無負荷最大回転数np2と目標マッチング回転数np1との間でエンジン回転数を制御するエンジン制御手段と、を備える。
【選択図】図4
Description
[全体構成]
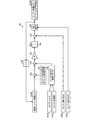
まず、図1および図2は、作業機械としての一例である油圧ショベル1の全体構成を示している。この油圧ショベル1は、車両本体2と作業機3とを備えている。車両本体2は、下部走行体4と上部旋回体5とを有する。下部走行体4は、一対の走行装置4aを有する。各走行装置4aは、履帯4bを有する。各走行装置4aは、右走行モータと左走行モータ(走行モータ21)とによって履帯4bを駆動することによって油圧ショベル1を走行あるいは旋回させる。
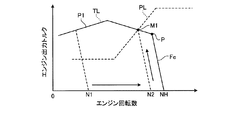
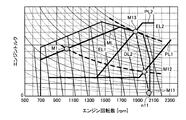
まず、図3に示すトルク線図を参照してエンジン制御の概要について説明する。エンジンコントローラ30は、レバー操作量、作業モードおよび燃料調整ダイヤル(スロットルダイヤル)28の設定値、上部旋回体5の旋回速度(旋回回転数)などの情報(運転状態を示す信号)を取得し、エンジン出力指令値を求める。このエンジン出力指令値は、トルク線図上の等馬力曲線(エンジン出力指令値曲線)ELとなり、エンジンの出力を制限する曲線である。
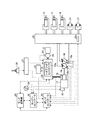
図5は、エンジンコントローラ30あるいはポンプコントローラ33による全体制御フローを示している。エンジンコントローラ30あるいはポンプコントローラ33は、最終的にエンジン制御指令としてのエンジン回転数指令値とエンジン出力指令値を演算し、ポンプ制御指令としてポンプ吸収トルク指令値を演算する。
ファン馬力=ファン定格馬力×(エンジン回転数/ファン定格時エンジン回転数)^3
を用いて簡易的に演算することで求められる。
エンジン実出力(kW)=2π÷60×エンジン回転数×エンジントルク÷1000
を用いて演算しエンジン実出力を求める。
エンジン回転数指令値D270=目標マッチング回転数np1を無負荷回転数に変換した回転数np1a+下限回転数オフセット値Δnm
を用いて求める値に近づけるようにする。このようにして求められたエンジン回転数指令値D270によってドループ線を制御することができ、ポンプ容量に余裕がある場合(平均ポンプ容量がある設定値より小の場合)には、図4に示すように、エンジン回転数を下げる(エンジン回転数をnm1(無負荷最小回転数)にする)ことが可能になり、燃料消費を抑えて燃費向上が可能になる。設定値q_com1は、あらかじめ設定した値であって、ポンプコントローラ33のメモリに記憶されている。なお、設定値q_com1は、エンジン回転数増加側とエンジン回転数減少側とに分けて2つの異なる設定値を設け、エンジン回転数が変化しない範囲を設けるようにしてもよい。
ポンプ目標マッチングトルク
=(60×1000×(エンジン目標出力−ファン馬力))
/(2π×目標マッチング回転数)
が演算される。求められたポンプ目標マッチングトルクは、ポンプ吸収トルク演算ブロック283に出力される。
ポンプ吸収トルク=ポンプ目標マッチングトルク
−Kp×(目標マッチング回転数−エンジン回転数)
が演算され、演算結果であるポンプ吸収トルク値D280が出力される。ここで、Kpは、制御ゲインである。
エンジン回転数指令値=目標マッチング回転数np1を無負荷回転数に変換した回転数np1a+下限回転数オフセット値Δnm
の演算によって求められる値となり、目標マッチング回転数に対してエンジンのドループ線は、最低でも下限回転数オフセット値Δnmが加味された高い回転数のところで設定される。このため、本実施の形態1によれば、油圧ポンプ18の実際の吸収トルク(ポンプ実吸収トルク)がポンプ吸収トルク指令に対して多少ばらついた場合でも、ドループ線にはかからない範囲でマッチングすることになり、エンジン17のマッチング回転数が多少変動してもエンジン出力をエンジン出力指令値曲線EL上で制限しエンジン目標出力を一定に制御しているため、実際の吸収トルク(ポンプ実吸収トルク)がポンプ吸収トルク指令に対してばらつきを生じてもエンジン出力の変動を小さくすることが可能となる。この結果、燃費のばらつきも小さく抑えることができ、油圧ショベル1の燃費に対する仕様を満たすことができる。燃費に対する仕様とは、例えば、従来の油圧ショベルに比べて、燃費を10%低減可能といった仕様である。
実施の形態1では、上部旋回体2が油圧モータ(旋回油圧モータ31)で旋回し、作業機3が全て油圧シリンダ14,15,16で駆動するような構造を有した油圧ショベル1に対して本発明を適用した例であったが、本実施の形態2は、上部旋回体5を電動旋回モータで旋回させる構造を有した油圧ショベル1に対して本発明を適用した例である。以下、油圧ショベル1は、ハイブリッド油圧ショベル1として説明する。以下、特に断りがないかぎり、本実施の形態2と実施の形態1は共通する構成をとる。
旋回馬力(kW)=2π÷60×旋回モータ回転数×旋回モータトルク÷1000×係数(設定値)
を演算することで求めることができる。なお、旋回馬力および発電機出力のポンプ出力リミット値への加算は、図22に示すように減算となっている。ハイブリッド油圧ショベル1は、エンジン17という駆動源とは異なる電気という駆動源で電動駆動する旋回モータ24を用いるので、旋回馬力を求めてポンプ出力リミット値から旋回分を減算することが必要である。発電機出力は、発電機19が発電するときは、値の正負の符号を負と定義しており、最小値選択部333で、ゼロ値332との比較が行われ、ポンプ出力リミット値に対して、負の値を減算するから実質的に加算となる。発電機19がエンジン17の出力アシストを行う場合は、発電機出力は、値の正負は正となる。発電機19が発電する時は、発電機出力は、負の値であるため、ゼロ値332との最小値選択を行った後に、ポンプ出力リミットから負の発電機出力を減算し、実質的にポンプ出力リミットに発電機出力を加算することとなる。すなわち、発電機出力D303が負の値となったときのみに加算が行われる。発電機19によるエンジン17のアシストは、エンジン回転数を、ある所定の回転数から高い回転数に上昇させる必要があるときに作業機3の応答性を高めるために行われるが、このときのエンジン出力としてエンジン17のアシスト分の出力を抜いてしまうと、作業機3の応答性の改善に繋がらないため、エンジン17をアシストしたからといってエンジン最大出力を減じることは行わない。つまり、正の発電機出力が最小値選択部333に入力されても、ゼロ値332との最小値選択により、最小値選択部333からはゼロが出力され。ポンプ出力リミットから減算が行われることなく、エンジン最大出力D230が求められる。
最小発電出力(kW)=2π÷60×エンジン回転数×最小発電トルク(値が負の設定値)÷1000
を演算し最小発電出力を求めて、要求される発電機出力が求められた最小発電出力よりも小さい場合、最小発電出力に対して足りない出力分をエンジン目標出力に加算部365によって加算し、この加算したエンジン目標出力を用いて、エンジン目標出力・目標マッチング回転数変換テーブル260によって目標マッチング回転数の候補値として演算し、発電オン/オフに伴う回転数変動を防止する。なお、発電機出力D303の後段の最小値選択部(MIN選択)361は、要求される発電機出力がない場合(エンジン17の出力アシストを行う場合など)にゼロ出力を行うためにゼロ値360との比較を行う。したがって、エンジン目標出力D240に何も加算しないようになる。また、最大値選択部(MAX選択)364は、要求される発電機出力が最小発電出力以上である場合に最小発電出力に不足はないことから、エンジン目標出力D240に加算は不要となる。よって、最大値選択部364に負の値が入力され、ゼロ値363との比較で最大値であるゼロが選択されて、最大値選択部364はゼロ出力する。
2 車両本体
3 作業機
4 下部走行体
5 上部旋回体
11 ブーム
12 アーム
13 バケット
14 ブームシリンダ
15 アームシリンダ
16 バケットシリンダ
17 エンジン
18 油圧ポンプ
18a 斜板角センサ
19 発電機
20 コントロールバルブ
20a ポンプ圧検出部
21 走行モータ
22 キャパシタ
23 インバータ
23a ハイブリッドコントローラ
24 旋回モータ
25 回転センサ
26 操作レバー
27 レバー操作量検出部
28 燃料調整ダイヤル
29 モード切替部
30 エンジンコントローラ
31 旋回油圧モータ
32 コモンレール制御部
33 ポンプコントローラ
Claims (7)
- 作業機械の運転状態を検出する検出手段と、
前記運転状態をもとに、作業機械の負荷が抜けた場合に最大限上げられるエンジンの回転数である無負荷最大回転数を演算する無負荷最大回転数演算手段と、
前記運転状態をもとに、負荷が加わった場合に上げられるエンジンの回転数である目標マッチング回転数を前記無負荷最大回転数とは別に演算する目標マッチング回転数演算手段と、
前記運転状態をもとに、最大限出力することができるエンジン目標出力を演算するエンジン目標出力演算手段と、
前記エンジン目標出力の制限下で、前記無負荷最大回転数と前記目標マッチング回転数との間でエンジン回転数を制御するエンジン制御手段と、
を備えたことを特徴とする作業機械のエンジン制御装置。 - 予めエンジン回転数の変動幅を設定する変動幅設定手段と、
前記無負荷最大回転数から前記変動幅分の回転数下げたエンジンの回転数を最小回転数制限値とし、前記運転状態をもとに、負荷が加わった場合に最低限上げなければならないエンジンの回転数であるマッチング最小回転数を演算するマッチング最小回転数演算手段と、
を備え、
前記エンジン制御手段は、前記エンジン目標出力の制限下で、前記無負荷最大回転数と前記マッチング最小回転数との間でエンジン回転数を制御することを特徴とする請求項1に記載の作業機械のエンジン制御装置。 - 前記エンジン制御手段は、前記目標マッチング回転数に下限回転数オフセット値を加えたエンジン回転数をエンジン回転数指令値として出力することを特徴とする請求項1または2に記載の作業機械のエンジン制御装置。
- 可変容量型油圧ポンプと、
前記可変容量型油圧ポンプのポンプ容量を検出する容量検出手段と、
を備え、
前記エンジン制御手段は、前記ポンプ容量が閾値以上である場合、エンジン回転数を上げ、ポンプ容量が閾値未満の場合、エンジン回転数を下げたエンジン回転数指令値を出力することを特徴とする請求項1〜3のいずれか一つに記載の作業機械のエンジン制御装置。 - 前記マッチング最小回転数演算手段は、前記作業機械の旋回体の回転数を検出する回転数検出手段による検出値がゼロに近い場合にはマッチング最小回転数を上げ、前記回転数検出手段による検出値が大きくなるに従ってマッチング最小回転数を下げた値を最小回転数制限値とし、前記運転状態をもとに、作業機械に負荷が加わった場合に最低限上げなければならないエンジンの回転数であるマッチング最小回転数を演算することを特徴とする請求項2に記載の作業機械のエンジン制御装置。
- 作業機械の運転状態を検出する検出ステップと、
前記運転状態をもとに、作業機械の負荷が抜けた場合に最大限上げられるエンジンの回転数である無負荷最大回転数を演算する無負荷最大回転数演算ステップと、
前記運転状態をもとに、作業機械に負荷が加わった場合に上げられるエンジンの回転数である目標マッチング回転数を前記無負荷最大回転数とは別に演算する目標マッチング回転数演算ステップと、
前記運転状態をもとに、最大限出力することができるエンジン目標出力を演算するエンジン目標出力演算ステップと、
前記エンジン目標出力の制限下で、前記無負荷最大回転数と前記目標マッチング回転数との間でエンジン回転数を制御するエンジン制御ステップと、
を含むことを特徴とする作業機械のエンジン制御方法。 - 予めエンジン回転数の変動幅を設定する変動幅設定ステップと、
前記無負荷最大回転数から前記変動幅分の回転数下げたエンジンの回転数を最小回転数制限値とし、前記運転状態をもとに、作業機械に負荷が加わった場合に最低限上げなければならないエンジンの回転数であるマッチング最小回転数を演算するマッチング最小回転数演算ステップと、
を含み、
前記エンジン制御ステップは、前記エンジン目標出力の制限下で、前記無負荷最大回転数と前記マッチング最小回転数との間でエンジン回転数を制御することを特徴とする請求項6に記載の作業機械のエンジン制御方法。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011111387A JP5222975B2 (ja) | 2011-05-18 | 2011-05-18 | 作業機械のエンジン制御装置およびそのエンジン制御方法 |
| PCT/JP2012/060380 WO2012157387A1 (ja) | 2011-05-18 | 2012-04-17 | 作業機械のエンジン制御装置およびそのエンジン制御方法 |
| CN201280002546.XA CN103080511B (zh) | 2011-05-18 | 2012-04-17 | 作业机械的发动机控制装置及其发动机控制方法 |
| KR1020137004313A KR101385788B1 (ko) | 2011-05-18 | 2012-04-17 | 작업 기계의 엔진 제어 장치 및 그 엔진 제어 방법 |
| DE112012000060.9T DE112012000060B4 (de) | 2011-05-18 | 2012-04-17 | Brennkraftmaschinensteuerungsvorrichtung einer Arbeitsmaschine und Brennkraftmaschinensteuerungsverfahren für die Maschine |
| US13/816,494 US20140200795A1 (en) | 2011-05-18 | 2012-04-17 | Engine control device of working machine, and engine control method for the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011111387A JP5222975B2 (ja) | 2011-05-18 | 2011-05-18 | 作業機械のエンジン制御装置およびそのエンジン制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012241585A true JP2012241585A (ja) | 2012-12-10 |
| JP5222975B2 JP5222975B2 (ja) | 2013-06-26 |
Family
ID=47176727
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011111387A Active JP5222975B2 (ja) | 2011-05-18 | 2011-05-18 | 作業機械のエンジン制御装置およびそのエンジン制御方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20140200795A1 (ja) |
| JP (1) | JP5222975B2 (ja) |
| KR (1) | KR101385788B1 (ja) |
| CN (1) | CN103080511B (ja) |
| DE (1) | DE112012000060B4 (ja) |
| WO (1) | WO2012157387A1 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140083149A (ko) * | 2012-12-24 | 2014-07-04 | 두산인프라코어 주식회사 | 굴삭기의 엔진 회전수 제어시스템 |
| JP2016016688A (ja) * | 2014-07-04 | 2016-02-01 | 日立建機株式会社 | ハイブリッド式作業車両 |
| US9273615B2 (en) | 2013-07-23 | 2016-03-01 | Komatsu Ltd. | Control device of internal combustion engine, work machine and control method of internal combustion engine |
| CN105723033A (zh) * | 2016-01-20 | 2016-06-29 | 株式会社小松制作所 | 作业机械的动力机械控制装置、作业机械以及作业机械的动力机械控制方法 |
| WO2016108292A1 (ja) * | 2016-01-20 | 2016-07-07 | 株式会社小松製作所 | ハイブリッド作業機械の機関制御装置、ハイブリッド作業機械及びハイブリッド作業機械の機関制御方法 |
| WO2016114406A1 (ja) * | 2016-01-20 | 2016-07-21 | 株式会社小松製作所 | ハイブリッド作業機械の制御装置、ハイブリッド作業機械、及びハイブリッド作業機械の制御方法 |
| DE112013000220B4 (de) * | 2013-05-31 | 2016-08-18 | Komatsu Ltd. | Kraftmaschinensteuergerät für eine Arbeitsmaschine und Kraftmaschinensteuerverfahren dafür |
| KR20170039611A (ko) | 2015-09-30 | 2017-04-11 | 가부시키가이샤 고마쓰 세이사쿠쇼 | 하이브리드 작업 기계의 기관 제어 장치, 하이브리드 작업 기계 및 하이브리드 작업 기계의 기관 제어 방법 |
| US10554845B2 (en) | 2016-01-20 | 2020-02-04 | Komatsu Ltd. | Work vehicle and method of controlling engine output |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5529949B2 (ja) * | 2012-11-20 | 2014-06-25 | 株式会社小松製作所 | 作業機械及び作業管理システム |
| US9469970B2 (en) * | 2013-02-18 | 2016-10-18 | Komatsu Ltd. | Hydraulic excavator |
| KR102192740B1 (ko) * | 2014-04-24 | 2020-12-17 | 두산인프라코어 주식회사 | 건설기계의 엔진 및 유압펌프 통합 제어 장치 및 방법 |
| JP6606103B2 (ja) * | 2015-01-06 | 2019-11-13 | 住友重機械工業株式会社 | 建設機械 |
| CN105298659B (zh) * | 2015-09-29 | 2018-02-23 | 北汽福田汽车股份有限公司 | 工程机械及其发动机控制器、控制系统和方法 |
| KR20210103782A (ko) | 2020-02-14 | 2021-08-24 | 두산인프라코어 주식회사 | 건설기계의 제어 방법 및 제어 시스템 |
| BR112023025011A2 (pt) * | 2021-06-03 | 2024-02-20 | Caterpillar Inc | Sistema e método para controlar as operações do motor |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58135341A (ja) * | 1982-02-05 | 1983-08-11 | Hitachi Constr Mach Co Ltd | 内燃機関を備えた油圧系統の制御装置 |
| JPH112144A (ja) * | 1997-06-12 | 1999-01-06 | Hitachi Constr Mach Co Ltd | 建設機械のエンジン制御装置 |
| JP2004150304A (ja) * | 2002-10-29 | 2004-05-27 | Komatsu Ltd | エンジンの制御装置 |
| JP2007231848A (ja) * | 2006-03-01 | 2007-09-13 | Shin Caterpillar Mitsubishi Ltd | エンジン制御方法およびエンジン制御装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1982001396A1 (en) * | 1980-10-09 | 1982-04-29 | Izumi Eiki | Method and apparatus for controlling a hydraulic power system |
| US5286171A (en) * | 1991-11-13 | 1994-02-15 | Shin Caterpillar Mitsubishi Ltd. | Method for controlling engine for driving hydraulic pump to operate hydraulic actuator for construction equipment |
| KR100257852B1 (ko) * | 1995-10-31 | 2000-06-01 | 토니헬샴 | 유압식 건설기계의 엔진회전수 제어방법 |
| US6092504A (en) * | 1998-08-04 | 2000-07-25 | Caterpillar Inc. | Device for controlling engine speed using dual governors |
| EP1172248A3 (en) * | 2000-07-12 | 2006-10-04 | Deere & Company | Work vehicle with operator selected load control |
| JP3849456B2 (ja) * | 2001-04-27 | 2006-11-22 | アイシン・エィ・ダブリュ株式会社 | 自動変速機の変速制御装置 |
| SE521188C2 (sv) * | 2002-02-11 | 2003-10-07 | Kalmar Ind Sverige Ab | Hydraulsystem för ett fordon, fordon innefattande ett sådant hydraulsystem samt en tilläggsenhet för ett sådant fordon |
| DE112004000622T5 (de) * | 2003-10-31 | 2006-03-09 | Komatsu Ltd. | Motorausgangsleistungs-Steuereinheit |
| US7607296B2 (en) * | 2003-12-09 | 2009-10-27 | Komatsu Ltd. | Device and method of controlling hydraulic drive of construction machinery |
| JP4410640B2 (ja) * | 2004-09-06 | 2010-02-03 | 株式会社小松製作所 | 作業車両のエンジンの負荷制御装置 |
| JP4188902B2 (ja) * | 2004-11-22 | 2008-12-03 | 日立建機株式会社 | 油圧建設機械の制御装置 |
| JP4766594B2 (ja) * | 2005-09-07 | 2011-09-07 | ヤンマー株式会社 | 作業車両 |
| US7959538B2 (en) * | 2005-10-14 | 2011-06-14 | Komatsu Ltd. | Device and method for controlling engine and hydraulic pump of working vehicle |
| JP4407619B2 (ja) | 2005-10-28 | 2010-02-03 | 株式会社小松製作所 | エンジンおよび油圧ポンプの制御装置 |
| DE112006002935B4 (de) * | 2005-10-28 | 2013-09-05 | Komatsu Ltd. | Steuervorrichtung einer Maschine, Steuervorrichtung einer Maschine und einer Hydraulikpumpe, und Steuervorrichtung einer Maschine, einer Hydraulikpumpe und eines Generatormotors |
| KR101033630B1 (ko) * | 2007-01-18 | 2011-05-11 | 가부시키가이샤 고마쓰 세이사쿠쇼 | 엔진 제어 장치 및 그 제어 방법 |
| CN101636543B (zh) * | 2007-03-28 | 2012-03-07 | 株式会社小松制作所 | 混合动力建筑机械的控制方法及混合动力建筑机械 |
| CN101636542B (zh) * | 2007-03-29 | 2011-12-07 | 株式会社小松制作所 | 建筑机械及建筑机械的控制方法 |
| JP2009052519A (ja) | 2007-08-29 | 2009-03-12 | Caterpillar Japan Ltd | 作業機械におけるエンジン制御装置 |
| JP5064160B2 (ja) * | 2007-09-19 | 2012-10-31 | 株式会社小松製作所 | エンジンの制御装置 |
| JP5156312B2 (ja) * | 2007-09-19 | 2013-03-06 | 株式会社小松製作所 | エンジンの制御装置 |
| JP5091953B2 (ja) * | 2007-10-22 | 2012-12-05 | 株式会社小松製作所 | 作業車両のエンジン出力制御装置および方法 |
| WO2009104636A1 (ja) * | 2008-02-18 | 2009-08-27 | 株式会社小松製作所 | エンジンの制御装置及びその制御方法 |
| WO2011096382A1 (ja) * | 2010-02-03 | 2011-08-11 | 株式会社小松製作所 | エンジンの制御装置 |
| JP5124033B2 (ja) * | 2011-05-18 | 2013-01-23 | 株式会社小松製作所 | 作業機械のエンジン制御装置およびそのエンジン制御方法 |
| JP5092061B1 (ja) * | 2012-03-30 | 2012-12-05 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
-
2011
- 2011-05-18 JP JP2011111387A patent/JP5222975B2/ja active Active
-
2012
- 2012-04-17 KR KR1020137004313A patent/KR101385788B1/ko active Active
- 2012-04-17 CN CN201280002546.XA patent/CN103080511B/zh active Active
- 2012-04-17 DE DE112012000060.9T patent/DE112012000060B4/de active Active
- 2012-04-17 WO PCT/JP2012/060380 patent/WO2012157387A1/ja active Application Filing
- 2012-04-17 US US13/816,494 patent/US20140200795A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58135341A (ja) * | 1982-02-05 | 1983-08-11 | Hitachi Constr Mach Co Ltd | 内燃機関を備えた油圧系統の制御装置 |
| JPH112144A (ja) * | 1997-06-12 | 1999-01-06 | Hitachi Constr Mach Co Ltd | 建設機械のエンジン制御装置 |
| JP2004150304A (ja) * | 2002-10-29 | 2004-05-27 | Komatsu Ltd | エンジンの制御装置 |
| JP2007231848A (ja) * | 2006-03-01 | 2007-09-13 | Shin Caterpillar Mitsubishi Ltd | エンジン制御方法およびエンジン制御装置 |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101962971B1 (ko) | 2012-12-24 | 2019-03-27 | 두산인프라코어 주식회사 | 굴삭기의 엔진 회전수 제어시스템 |
| KR20140083149A (ko) * | 2012-12-24 | 2014-07-04 | 두산인프라코어 주식회사 | 굴삭기의 엔진 회전수 제어시스템 |
| DE112013000220B4 (de) * | 2013-05-31 | 2016-08-18 | Komatsu Ltd. | Kraftmaschinensteuergerät für eine Arbeitsmaschine und Kraftmaschinensteuerverfahren dafür |
| US9494169B2 (en) | 2013-05-31 | 2016-11-15 | Komatsu Ltd. | Engine control apparatus for work machine and engine control method thereof |
| US9273615B2 (en) | 2013-07-23 | 2016-03-01 | Komatsu Ltd. | Control device of internal combustion engine, work machine and control method of internal combustion engine |
| JPWO2015011784A1 (ja) * | 2013-07-23 | 2017-03-02 | 株式会社小松製作所 | 内燃機関の制御装置、作業機械及び内燃機関の制御方法 |
| JP2016016688A (ja) * | 2014-07-04 | 2016-02-01 | 日立建機株式会社 | ハイブリッド式作業車両 |
| KR20170039611A (ko) | 2015-09-30 | 2017-04-11 | 가부시키가이샤 고마쓰 세이사쿠쇼 | 하이브리드 작업 기계의 기관 제어 장치, 하이브리드 작업 기계 및 하이브리드 작업 기계의 기관 제어 방법 |
| JP5957628B1 (ja) * | 2016-01-20 | 2016-07-27 | 株式会社小松製作所 | 作業機械の機関制御装置、作業機械及び作業機械の機関制御方法 |
| WO2016114406A1 (ja) * | 2016-01-20 | 2016-07-21 | 株式会社小松製作所 | ハイブリッド作業機械の制御装置、ハイブリッド作業機械、及びハイブリッド作業機械の制御方法 |
| WO2016108292A1 (ja) * | 2016-01-20 | 2016-07-07 | 株式会社小松製作所 | ハイブリッド作業機械の機関制御装置、ハイブリッド作業機械及びハイブリッド作業機械の機関制御方法 |
| JP6093905B2 (ja) * | 2016-01-20 | 2017-03-08 | 株式会社小松製作所 | ハイブリッド作業機械の機関制御装置、ハイブリッド作業機械及びハイブリッド作業機械の機関制御方法 |
| WO2016108293A1 (ja) * | 2016-01-20 | 2016-07-07 | 株式会社小松製作所 | 作業機械の機関制御装置、作業機械及び作業機械の機関制御方法 |
| JPWO2016114406A1 (ja) * | 2016-01-20 | 2017-04-27 | 株式会社小松製作所 | ハイブリッド作業機械の制御装置、ハイブリッド作業機械、及びハイブリッド作業機械の制御方法 |
| US10144409B2 (en) | 2016-01-20 | 2018-12-04 | Komatsu Ltd. | Engine control device of work machine, work machine, and engine control method of work machine |
| CN105723033A (zh) * | 2016-01-20 | 2016-06-29 | 株式会社小松制作所 | 作业机械的动力机械控制装置、作业机械以及作业机械的动力机械控制方法 |
| US10554845B2 (en) | 2016-01-20 | 2020-02-04 | Komatsu Ltd. | Work vehicle and method of controlling engine output |
| DE112016000010B4 (de) * | 2016-01-20 | 2021-02-25 | Komatsu Ltd. | Motor-Steuervorrichtung von Arbeitsmaschine, Arbeitsmaschine und Motorsteuerverfahren von Arbeitsmaschine |
| DE112016000049B4 (de) | 2016-01-20 | 2022-03-10 | Komatsu Ltd. | Arbeitsfahrzeug und Verfahren zum Steuern von Ausgangsleistung eines Motors |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112012000060T5 (de) | 2013-04-18 |
| CN103080511B (zh) | 2015-09-30 |
| KR20130041236A (ko) | 2013-04-24 |
| KR101385788B1 (ko) | 2014-04-16 |
| US20140200795A1 (en) | 2014-07-17 |
| CN103080511A (zh) | 2013-05-01 |
| JP5222975B2 (ja) | 2013-06-26 |
| WO2012157387A1 (ja) | 2012-11-22 |
| DE112012000060B4 (de) | 2017-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5222975B2 (ja) | 作業機械のエンジン制御装置およびそのエンジン制御方法 | |
| JP5244214B2 (ja) | 作業機械のエンジン制御装置およびそのエンジン制御方法 | |
| JP5124033B2 (ja) | 作業機械のエンジン制御装置およびそのエンジン制御方法 | |
| JP5727630B1 (ja) | 作業機械のエンジン制御装置およびそのエンジン制御方法 | |
| JP5824071B2 (ja) | 内燃機関の制御装置、作業機械及び内燃機関の制御方法 | |
| JP5303061B1 (ja) | エンジン制御装置及び建設機械 | |
| JP5193333B2 (ja) | 電動モータの制御装置およびその制御方法 | |
| JP5332051B2 (ja) | エンジン、油圧ポンプおよび発電電動機の制御装置 | |
| CN106121839B (zh) | 作业机械的发动机控制装置及其发动机控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120913 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20120918 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20121002 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130311 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160315 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5222975 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |