JP2012240166A - ビジョンセンサ及び吸引装置を備えた吸着搬送装置 - Google Patents
ビジョンセンサ及び吸引装置を備えた吸着搬送装置 Download PDFInfo
- Publication number
- JP2012240166A JP2012240166A JP2011113770A JP2011113770A JP2012240166A JP 2012240166 A JP2012240166 A JP 2012240166A JP 2011113770 A JP2011113770 A JP 2011113770A JP 2011113770 A JP2011113770 A JP 2011113770A JP 2012240166 A JP2012240166 A JP 2012240166A
- Authority
- JP
- Japan
- Prior art keywords
- suction
- suction nozzle
- nozzle
- workpiece
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0616—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40053—Pick 3-D object from pile of objects
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Multimedia (AREA)
- Manipulator (AREA)
Abstract
【課題】ロボットに設けられた取出し手段が取出し対象のワークに対して正確に位置決めされていなくとも、ワークを効率よく1つずつ取出して搬送可能な吸着搬送装置の提供。
【解決手段】吸着搬送装置10は、ロボット12と、容器14内にばら積みされた複数のワーク16を検出可能なビジョンセンサ18とを有する。ロボット12には、複数のワーク16から該ワークを1つずつ吸引して取り出すように構成された吸着ノズル20が搭載される。ノズル20は、ロボットアーム22に取付けられることによってその位置及び姿勢が変更可能であるとともに、送風用部材24を介して吸引装置26に流体的に連結されている。吸引装置26は、ノズル20を通して空気を吸引し、取出し対象ワークをノズル20の方向に引きつける吸引力をノズル20に生じさせ、これによりノズル20は取出し対象ワークを吸着保持する。
【選択図】図1
【解決手段】吸着搬送装置10は、ロボット12と、容器14内にばら積みされた複数のワーク16を検出可能なビジョンセンサ18とを有する。ロボット12には、複数のワーク16から該ワークを1つずつ吸引して取り出すように構成された吸着ノズル20が搭載される。ノズル20は、ロボットアーム22に取付けられることによってその位置及び姿勢が変更可能であるとともに、送風用部材24を介して吸引装置26に流体的に連結されている。吸引装置26は、ノズル20を通して空気を吸引し、取出し対象ワークをノズル20の方向に引きつける吸引力をノズル20に生じさせ、これによりノズル20は取出し対象ワークを吸着保持する。
【選択図】図1
Description
本発明は、ビジョンセンサ及び吸引装置を備えたロボットによって、ばら積みされたワークの取出しを行う吸着搬送装置に関する。
箱内やパレット上にランダムに配置された、いわゆるばら積みされた複数のワークを、ロボットを用いて1つずつ取出す装置は周知である。例えば特許文献1には、電磁石、吸着パッド又はチャック機構を先端に有したロボットを用いて、コンテナ内の部品を把持して取り出すように構成された物品取出し装置が開示されている。
特許文献1に記載の発明では、ロボットハンドが取出し対象ワークの近傍にある他のワークに干渉したり、カメラによる位置検出誤差に起因してロボットハンドが取出し対象ワークに対して適切な位置・姿勢となるように移動できなかったりする等の不具合が生じ、ワークを効率よく取出すことが困難な場合があった。またロボットハンドとして磁力式のものを用いた場合は、複数個のワークを同時に吸引保持してしまい、ワークを1つずつ取出すことが難しい場合があった。
そこで本発明は、ロボットに設けられた取出し手段が取出し対象のワークに対して正確に位置決めされていなくとも、ワークを効率よく1つずつ取出して搬送可能な吸着搬送装置を提供することを目的とする。
上記目的を達成するために、請求項1に記載の発明は、ばら積みされた複数のワークのうちの1つを対象物として、ロボットに搭載した吸着ノズルにより吸着して取出して搬送する吸着搬送装置であって、前記ばら積みされた複数のワークの2次元画像を撮像するカメラ、及び該カメラが撮像した画像を処理する画像処理部からなり、前記撮像した2次元画像に基づいて取出すべき対象物を選択し、該対象物の2次元位置、及び該2次元位置から前記対象物と前記カメラとを結ぶ3次元空間上のカメラの視線を求めるビジョンセンサと、前記吸着ノズルに流体的に連結されるとともに、該吸着ノズルを通して空気を吸引し、前記対象物を該吸着ノズルの方向に引きつける吸引力を該ノズルに生じさせる吸引装置と、前記対象物に前記吸着ノズルが接触したことを検知する突当検知部と、を備え、前記ロボットにより、前記吸着ノズルを前記求めたカメラの視線に沿って前記対象物に接近させる接近動作を行い、該接近動作中に、前記突当検知部により前記対象物に前記吸着ノズルが当接したことが検知されたとき、前記接近動作を停止させ、前記吸引装置による吸引力により、前記吸着ノズルに対する前記対象物の姿勢が、前記当接時の当接時姿勢から、前記吸着ノズルに吸着保持されているときの吸着保持姿勢に修正される、吸着搬送装置を提供する。
請求項2に記載の発明は、請求項1に記載の吸着搬送装置において、前記突当検知部は、前記ロボットのサーボのフィードバック情報を監視し、前記ノズルと前記対象物が接触したことに基づく該フィードバック情報の変化を検知することによって、前記対象物に前記吸着ノズルが接触したことを検知する装置である、吸着搬送装置を提供する。
請求項3に記載の発明は、請求項1に記載の吸着搬送装置において、前記突当検知部は、前記吸着ノズルと前記ロボットの可動部との間に設けられた伸縮自在なフローティング機構であり、該フローティング機構は、前記吸着ノズルが前記対象物に接触したときに圧縮されるように構成される、吸着搬送装置を提供する。
請求項4に記載の発明は、請求項1〜3のいずれか1項に記載の吸着搬送装置において、前記対象物が前記吸着ノズルに嵌まり込む量を制限するための制限部材が前記吸着ノズルに設けられる、吸着搬送装置を提供する。
請求項5に記載の発明は、請求項1〜4のいずれか1項に記載の吸着搬送装置において、前記対象物が前記吸着ノズルにより保持されていることを検知する吸着検知部を有する、吸着搬送装置を提供する。
請求項6に記載の発明は、請求項5に記載の吸着搬送装置において、前記吸着検知部は、前記吸着ノズルから前記吸引装置までの間の空気圧、空気流量及び空気流速の少なくとも1つを検出する吸着検知センサである、吸着搬送装置を提供する。
請求項7に記載の発明は、請求項1〜6のいずれか1項に記載の吸着搬送装置において、1回の取出し操作における前記対象物の取出し数を1つに限定すべく、前記吸着ノズルの開口部を該対象物の吸着部位よりも小さくした、吸着搬送装置を提供する。
本発明によれば、吸着ノズルの先端がワークに接触するだけでワークの取出しができるようになるため、ワークに対するノズルの位置・姿勢を正確に制御する必要がなく、ワークの状態や密着度合いによる取出しの困難さが是正され、ばら積み状態のワークの取出し効率が飛躍的に向上する。また、ビジョンセンサの検出精度の影響も小さくなる。さらに、ノズル形状をワークに適合させることにより、容易にワークの複数個取出しを防止でき、いわゆるワークの1個取りが可能になる。
突当検知部としては、サーボのフィードバックや、フローティング機構等の比較的簡易な手段を利用することができる。またフィードバックを利用する場合、ノズル近傍に部材や装置を設ける必要がなく、吸着搬送装置をよりコンパクトにできる。
吸着ノズルに制限部材を設けることにより、吸着ノズル内にワークが不都合に嵌まり込んでしまうことを確実に防止できる。
吸着検知部を設けることにより、取出し対象物が吸着ノズルに吸着保持されていることを確実に検知できる。また吸着検知部としては、ノズル内の圧力、風量又は線速を測定するセンサが好適に利用できる。
吸着ノズルの開口部を対象物の吸着部位よりも小さくすることにより、1回の取出し操作における対象物の取出し数を確実に1つに限定することができる。
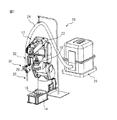
図1は、本発明に係る吸着搬送装置10の概略構成を示す外観図である。吸着搬送装置10は、ロボット12と、容器14内等の所定の場所にばら積みされた複数の(図示例では同種の)ワーク16を検出可能なビジョンセンサ18とを有する。ロボット12には、複数のワーク16から該ワークを1つずつ吸引して取り出すように構成された吸着ノズル20が搭載され、より具体的には吸着ノズル20は、各軸回りに可動に構成された(例えば6軸の)ロボットアーム22の先端に設けられる。吸着ノズル20は、ロボットアーム22に取付けられることによってその位置及び姿勢が変更可能であるとともに、配管、チューブ、ダクト等の送風用部材24を介して吸引装置26に流体的に連結されている。吸引装置26は、吸着ノズル20を通して空気を吸引し、後述する取出し対象ワークを吸着ノズル20の方向に引きつける吸引力を吸着ノズル20に生じさせ、これにより吸着ノズル20は取出し対象ワークを吸着保持することができる。吸引装置26としては、ワークの重量や吸着ノズルの寸法等に基づいて、該吸着ノズルで該ワークを吸着保持するのに必要な風量(線速)が得られるような仕様のものが選定される。
ビジョンセンサ18は、ロボット12の可動部(図示例ではロボットアーム22の先端)に取り付けられ、容器14内にばら積みされた複数のワーク16の少なくとも1つ、好ましくは全体の2次元画像を撮像できるように構成されたカメラ28と、カメラ28が撮像した2次元画像を処理する画像処理部(図示せず)とを有する。画像処理部は、カメラ28が撮像した2次元画像に基づいて、1つのワークを取出すべき対象物として選択し、該対象物の2次元位置、及び該2次元位置から該対象物とカメラ28とを結ぶ3次元空間上のカメラ28の視線を求める。但しカメラ28は、ワーク16を撮像できるのであればどの部位に設けられてもよく、例えばロボット12の固定部や、ロボット12以外の箇所に設けられてもよい。またワーク16は、図示例では箱型の容器14内にばら積みすなわちランダムに収容されているが、本発明はこのような形態に限られず、例えばパレット上にランダムに配置されていてもよい。
ロボット12は、取出し対象ワーク16が吸着ノズル20により保持されていることを検知する吸着検知部を具備する。図示例では、該吸着検知部は、吸着ノズル20内又はノズル20から吸引装置26までの間の圧力、風量及び線速の少なくとも1つを検出するように構成された吸着検知センサ30である。吸着ノズル20がワーク16を吸着保持しているときは、吸着ノズル20の開口端の少なくとも一部が該ワークによって遮られるので、ワークを吸着保持していないときに比べ吸着ノズル20内の圧力、風量及び線速が低下する。吸着検知センサ30によって、圧力、風量又は線速の変化を検出することにより、ノズル20がワーク16を吸着保持しているか否かを検知できる。
また吸着搬送装置10は、吸着ノズル20がワーク16に当接したことを検知する突当検知部(図示例では吸着ノズル20に設けられた突当検知センサ32)を有する。図示された突当検知センサ32は、吸着ノズル20とロボットアーム22の先端との間に設けられた伸縮自在のフローティング機構であり、該フローティング機構は、吸着ノズル20が物体に当接したときに圧縮されるようになっている。該圧縮を検知することにより、吸着ノズル20がワーク16等の何らかの物体に当接したことを検知できる。
突当検知部としては、上記フローティング機構の代わりに、ロボット12の各軸を駆動するサーボのフィードバックを解析する制御装置等の装置を利用することもできる。吸着ノズル20がワーク等に接触すれば、サーボの電流値やモータのトルクが上昇する等、フィードバック情報に変化が生じるので、サーボのフィードバック情報を監視してその変化を解析することにより、吸着ノズル20が何らかの物体に当接したことを検知することができる。
なお本実施形態におけるワーク16は、後述する図5により明確に示すように、ノズル20の内径より大きい外径部分を備えた第1の円柱状部分34と、第1の円柱状部分34の外径より小径であって第1の円柱状部分34に同軸に連結された第2の円柱状部分36とからなり、本実施形態では、ノズル20との当接部分として、第1の円柱状部分34の側面がノズル20に吸着された状態でワーク16が搬送されるべきものとする。このように、吸着ノズル20の開口部を取出し対象ワーク16の吸着部位よりも小さくすることにより、1回の操作におけるワークの取出し数を確実に1つに限定することができる。
但し本発明におけるワークの搬送形態はこれに限られるものではなく、例えば図示例のワーク16において第2の円柱状部分の側面を吸着保持してもよいし、第1又は第2の円柱状部分の端面を吸着保持してもよい。またワークがディスク状である場合にはその表面又は裏面の一部を吸着保持する等が考えられ、このようにワークの吸着形態はワーク搬送先すなわち次工程の内容等に応じて適宜設定することができる。
次に、上記吸着搬送装置10によるワーク16の搬送手順について、図2のフローチャート及び図3−図6を参照しつつ説明する。先ず図3に示すように、ロボット12を操作して、容器14内のワーク16を撮像できる位置にカメラ28を移動させ(ステップS1)、カメラ28を用いて該ワーク16の2次元画像を撮像する(ステップS2)。次にカメラ28により得られた2次元画像について画像処理を行い、取出し対象とすべき1つのワーク16を検出・選択する(ステップS3)。第1のビジョンセンサ18による取出し対象の検出・選択については周知技術が適用可能なので詳細な説明は省略するが、例えば容器14内の複数のワーク16を撮像して得られた画像を処理し、各ワークの位置及び姿勢(向き)を求め、吸着ノズル20がワークを吸引するために必要な吸着ノズル20の位置及び姿勢の変化量が最も少なく(又は変化に要する時間が最も短く)なるようなワークを選択すること、さらにワークが互いに重なっているときは上側のワークを取出し対象として優先すること、等の条件に基づく処理が具体的な検出方法として考えられる。
取出し対象とすべきワークが検出されたら(ステップS3)、図4に示すように、ロボット12の動作を制御して、吸着ノズル20をアプローチ開始位置へ移動させる(ステップS4)。ここでアプローチ開始位置とは、取出し対象のワーク16から所定距離離れ、かつ吸着ノズル20が容器14内に向けて(例えば矢印で示すような)カメラ28の視線方向移動することにより、吸着ノズル20の先端(吸引口)が最初に該取出し対象ワーク16(より詳細にはワーク16の第1の円柱部分34の側面)に当接し得る位置を意味する。またカメラ28の該視線とは、カメラ28が撮像したワーク16の2次元画像に基づいて取出すべき対象物を選択し、該対象物の2次元位置、及び該2次元位置から取出し対象ワークとカメラ28とを結ぶ3次元空間上のカメラの視線を意味する。
次に、吸着ノズル20の先端から空気を吸引して所定の吸引力が得られるように、図1に示した吸引装置26を起動し(ステップS5)、その状態でノズル20を取出し対象ワーク16に向けて接近(移動)させる(ステップS6)。なお吸引装置26の起動は、後述するノズル20と取出し対象ワーク16との接触の直前又は直後に行ってもよい。
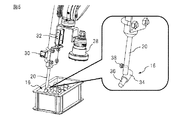
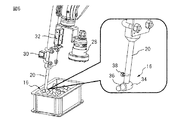
ステップS6で説明した吸着ノズル20の移動は、上述の突当検知器32が、移動中の吸着ノズル20が取出し対象ワーク16に当接したことを検知するまで続けられる(ステップS7)。ここで、図5に示すように、吸着ノズル20の先端がワーク16(図示例では第1の円柱部分34の側面)に当接した直後の状態(当接時姿勢)では、該ワーク16は吸着ノズル20に対して適切な姿勢となっていないが、上述のように吸着ノズル20に連結された吸引装置26は作動中なので、吸着ノズル20に生じる吸引力によって、図6に示すように、取出し対象ワーク16の姿勢(3次元的な傾き)が修正され、該ワーク16は吸着ノズル20に適切に吸着保持された状態(吸着保持姿勢)となる。換言すれば本願発明では、吸着ノズル20が取出し対象ワーク16に当接すれば、該吸着ノズルの吸引力によって取出し対象ワークの姿勢が、当接時姿勢から吸着保持姿勢に自動的に修正される。従って本願発明では、取出し対象ワークに吸着ノズル20をアプローチさせる際の吸着ノズルの位置・姿勢を厳密に規定する必要はない。
ここで図5及び図6に示すように、吸着ノズル20は、取出し対象ワーク16が吸着ノズル20内に嵌まり込む量を制限するための制限部材38を有してもよい。図示例の制限部材38は、吸着ノズル20の先端から、ワーク16の許容嵌まり込み量に相当する距離だけ離れた位置に取り付けられたネジ又はピン状の部材であり、吸着ノズル20の内部に延在し、吸着ノズル20内でのワーク16の移動距離を許容値内に制限できるようになっている。なおネジやピン状部材の代わりに、吸着ノズル20内にメッシュを設けてもよい。
吸着ノズル20が取出し対象ワーク16に当接したことが検知されたら、吸着ノズル20の移動を一旦停止させ、次に吸着ノズル20を、取出し対象ワーク16を取出すように退避移動(通常は上昇)させる(ステップS8)。ここで、上述の吸着検知センサ30を用いて吸着ノズル20内の圧力、風量及び線速の少なくとも1つを測定し、測定値に基づいて吸着ノズル20がワークを保持しているか否かを判定する(ステップS9)。すなわち、吸着ノズル20内の圧力が所定の負圧以下になっているか、風量が所定の値以下になっているか、線速が所定の値以下になっていれば、それは図6に示すように取出し対象ワーク16が吸着ノズル20に好適に吸着保持されていることを意味するので、ロボット12を操作して吸着保持しているワークを所定の搬送先に搬送する(ステップS10)。
一方、吸着検知センサ30により測定された吸着ノズル20内の圧力が所定の負圧まで減圧されていないときは、吸着ノズル20によるワークの吸着保持が失敗している(吸着ノズル20がワークを保持していない)ことを意味するので、一旦吸引装置26を停止させ(ステップS11)、ステップS1に戻って処理をやり直す。
ある取出し対象ワークの取出し・搬送が完了したら、図2のフローチャートに従って新たな取出し対象ワークの検出・取出し(吸着)及び搬送を行う。但し、前回のワーク取出し操作によって他のワークの位置・姿勢が大きく変化してない場合等は、ステップS1及びS2を省略することもできる。
上述のように本願発明では、空気の吸引により生じる吸引力を利用した吸着ノズルの使用により、吸引時の該吸着ノズルの位置・姿勢に関して自由度を向上させることができるが、該吸着ノズルに吸着保持されているワークの該ノズルに対する姿勢が、取出されるワーク毎に一定にならないことが考えられる。そこで図7に示すように、カメラ28とは異なる、固定配置された第2のカメラ40を使用し、吸着ノズル20に保持されているワーク16の姿勢を検出することも可能である。これにより、吸着ノズルに保持されているワーク16の姿勢の検出結果を予め測定しておいた基本姿勢と比較する等の処理をすることにより、次工程での該ワークの姿勢を、ワーク間で常に一定にすることができる。
また吸着ノズル20に保持されたワーク16の姿勢の検出結果によっては、該ワークを保持し直す必要となる場合もある。そのような場合は、図8に示すように、吸着ノズル20によって取出したワーク16を一旦仮置き台42に置き、ビジョンセンサのカメラ28によって仮置き台42上のワーク16を検出して、該検出結果を利用して吸着ノズル20によってワーク16の吸着保持をやり直すことができる。
10 吸着搬送装置
12 ロボット
14 容器
16 ワーク
18 ビジョンセンサ
20 吸着ノズル
26 吸引装置
28 カメラ
30 真空圧センサ
32 フローティング機構
38 制限部材
40 第2のカメラ
42 仮置き台
12 ロボット
14 容器
16 ワーク
18 ビジョンセンサ
20 吸着ノズル
26 吸引装置
28 カメラ
30 真空圧センサ
32 フローティング機構
38 制限部材
40 第2のカメラ
42 仮置き台
Claims (7)
- ばら積みされた複数のワークのうちの1つを対象物として、ロボットに搭載した吸着ノズルにより吸着して取出して搬送する吸着搬送装置であって、
前記ばら積みされた複数のワークの2次元画像を撮像するカメラ、及び該カメラが撮像した画像を処理する画像処理部からなり、前記撮像した2次元画像に基づいて取出すべき対象物を選択し、該対象物の2次元位置、及び該2次元位置から前記対象物と前記カメラとを結ぶ3次元空間上のカメラの視線を求めるビジョンセンサと、
前記吸着ノズルに流体的に連結されるとともに、該吸着ノズルを通して空気を吸引し、前記対象物を該吸着ノズルの方向に引きつける吸引力を該ノズルに生じさせる吸引装置と、
前記対象物に前記吸着ノズルが接触したことを検知する突当検知部と、を備え、
前記ロボットにより、前記吸着ノズルを前記求めたカメラの視線に沿って前記対象物に接近させる接近動作を行い、該接近動作中に、前記突当検知部により前記対象物に前記吸着ノズルが当接したことが検知されたとき、前記接近動作を停止させ、前記吸引装置による吸引力により、前記吸着ノズルに対する前記対象物の姿勢が、前記当接時の当接時姿勢から、前記吸着ノズルに吸着保持されているときの吸着保持姿勢に修正される、吸着搬送装置。 - 前記突当検知部は、前記ロボットのサーボのフィードバック情報を監視し、前記ノズルと前記対象物が接触したことに基づく該フィードバック情報の変化を検知することによって、前記対象物に前記吸着ノズルが接触したことを検知する装置である、請求項1に記載の吸着搬送装置。
- 前記突当検知部は、前記吸着ノズルと前記ロボットの可動部との間に設けられた伸縮自在なフローティング機構であり、該フローティング機構は、前記吸着ノズルが前記対象物に接触したときに圧縮されるように構成される、請求項1に記載の吸着搬送装置。
- 前記対象物が前記吸着ノズルに嵌まり込む量を制限するための制限部材が前記吸着ノズルに設けられる、請求項1〜3のいずれか1項に記載の吸着搬送装置。
- 前記対象物が前記吸着ノズルにより保持されていることを検知する吸着検知部を有する、請求項1〜4のいずれか1項に記載の吸着搬送装置。
- 前記吸着検知部は、前記吸着ノズルから前記吸引装置までの間の空気圧、空気流量及び空気流速の少なくとも1つを検出する吸着検知センサである、請求項5に記載の吸着搬送装置。
- 1回の取出し操作における前記対象物の取出し数を1つに限定すべく、前記吸着ノズルの開口部を該対象物の吸着部位よりも小さくした、請求項1〜6のいずれか1項に記載の吸着搬送装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011113770A JP2012240166A (ja) | 2011-05-20 | 2011-05-20 | ビジョンセンサ及び吸引装置を備えた吸着搬送装置 |
| US13/419,462 US20120296469A1 (en) | 2011-05-20 | 2012-03-14 | Sucking-conveying device having vision sensor and suction unit |
| DE102012104196A DE102012104196A1 (de) | 2011-05-20 | 2012-05-14 | Ansaugvorrichtung mit Sehfühler und Saugeinheit |
| CN201210157494.5A CN102806555A (zh) | 2011-05-20 | 2012-05-18 | 具备视觉传感器及吸引装置的吸附搬运装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011113770A JP2012240166A (ja) | 2011-05-20 | 2011-05-20 | ビジョンセンサ及び吸引装置を備えた吸着搬送装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012240166A true JP2012240166A (ja) | 2012-12-10 |
Family
ID=47088272
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011113770A Pending JP2012240166A (ja) | 2011-05-20 | 2011-05-20 | ビジョンセンサ及び吸引装置を備えた吸着搬送装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20120296469A1 (ja) |
| JP (1) | JP2012240166A (ja) |
| CN (1) | CN102806555A (ja) |
| DE (1) | DE102012104196A1 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2781315A1 (en) | 2013-03-18 | 2014-09-24 | Kabushiki Kaisha Yaskawa Denki | Robot picking system, control device and method of manufacturing a workpiece |
| DE102014109262A1 (de) | 2013-07-04 | 2015-01-08 | Fanuc Corporation | Umsetzvorrichtung zum Ansaugen und Umsetzen eines Objekts |
| JP2015047660A (ja) * | 2013-08-30 | 2015-03-16 | ファナック株式会社 | 磁石搬送位置決め装置 |
| JP2015085435A (ja) * | 2013-10-30 | 2015-05-07 | Thk株式会社 | 作業装置 |
| CN105201809A (zh) * | 2014-06-20 | 2015-12-30 | 中联重科股份有限公司 | 混凝土泵车及检测其泵送效率的检测装置、系统、方法 |
| WO2018139243A1 (ja) * | 2017-01-27 | 2018-08-02 | 日本電産サンキョー株式会社 | パネル搬送ロボット |
| JP2019198950A (ja) * | 2018-05-18 | 2019-11-21 | ファナック株式会社 | バラ積みされたワークを取り出すロボットシステムおよびロボットシステムの制御方法 |
| WO2020080478A1 (ja) * | 2018-10-19 | 2020-04-23 | Thk株式会社 | アクチュエータシステム |
| KR102187190B1 (ko) * | 2019-06-26 | 2020-12-04 | 주식회사 온코퀘스트파마슈티컬 | 자동차 내장재 성형장치 |
| CN115339858A (zh) * | 2022-08-08 | 2022-11-15 | 安徽鑫民玻璃股份有限公司 | 一种用于玻璃杯生产的翻转装置 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2141488B1 (en) * | 2008-07-01 | 2012-08-08 | Commissariat à l'Énergie Atomique et aux Énergies Alternatives | Device and method for holding and releasing a metallic sample holder, and use of this device |
| US9272421B2 (en) * | 2013-01-07 | 2016-03-01 | Milos Misha Subotincic | Visually controlled end effector |
| SG11201407527PA (en) * | 2013-01-30 | 2014-12-30 | Akribis Systems Pte Ltd | A planar positioning system and method of using the same |
| US9233470B1 (en) * | 2013-03-15 | 2016-01-12 | Industrial Perception, Inc. | Determining a virtual representation of an environment by projecting texture patterns |
| FR3007672B1 (fr) * | 2013-06-27 | 2017-03-31 | Commissariat Energie Atomique | Procede d'instrumentation d'un contenant destine a etre mis en mouvement en particulier pour malaxer un ensembre de materiaux |
| CN106413995B (zh) * | 2014-02-27 | 2019-12-20 | Abb瑞士股份有限公司 | 紧凑型机器人设备 |
| EP3896577B1 (en) * | 2014-08-07 | 2024-03-06 | Enorcom Corporation | Intelligent security connection mechanism |
| JP6088563B2 (ja) * | 2015-02-10 | 2017-03-01 | ファナック株式会社 | 位置及び姿勢の変換演算機能を備えたワーク取出しロボットシステム、及びワーク取出し方法 |
| JP6208701B2 (ja) * | 2015-02-16 | 2017-10-04 | ファナック株式会社 | クーラントノズルの位置を調整するためのロボットシステム、およびロボット制御方法 |
| US10518406B2 (en) * | 2015-09-17 | 2019-12-31 | Abb Schweiz Ag | Component feeder and a system for picking components comprising the component feeder |
| DE102015218195A1 (de) * | 2015-09-22 | 2017-03-23 | Robert Bosch Gmbh | Vorrichtung zur Aktivierung zumindest eines Greifers |
| CN105252251B (zh) * | 2015-11-02 | 2018-01-09 | 西北工业大学 | 一种实现飞行器隔热片自动抓取和精准贴合的装置及方法 |
| JP2017189856A (ja) * | 2016-04-15 | 2017-10-19 | オムロン株式会社 | アクチュエータ制御システム、アクチュエータ制御方法、情報処理プログラム、および記録媒体 |
| CN110125968A (zh) * | 2019-06-20 | 2019-08-16 | 南京灵雀智能制造有限公司 | 一种板材分拣机械手及分拣方法 |
| CN114905236A (zh) * | 2021-02-08 | 2022-08-16 | 广东博智林机器人有限公司 | 管道安装方法、装置及管道安装机器人 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1119895A (ja) * | 1997-06-30 | 1999-01-26 | Ando Electric Co Ltd | 吸着ハンドの昇降機構および制御方法 |
| JP2001205584A (ja) * | 2000-01-26 | 2001-07-31 | Matsushita Electric Works Ltd | ロボットハンド |
| JP2010012567A (ja) * | 2008-07-04 | 2010-01-21 | Fanuc Ltd | 物品取り出し装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11251792A (ja) * | 1998-03-03 | 1999-09-17 | Matsushita Electric Ind Co Ltd | 電子部品装着機 |
| JP4387745B2 (ja) * | 2003-09-30 | 2009-12-24 | 株式会社日立ハイテクインスツルメンツ | 電子部品装着装置 |
| GB0328887D0 (en) * | 2003-12-12 | 2004-01-14 | Glaxo Group Ltd | Object holding tool and object supporting unit |
| JP4450788B2 (ja) * | 2005-11-30 | 2010-04-14 | 株式会社日立ハイテクインスツルメンツ | 電子部品装着装置 |
| JP4809799B2 (ja) * | 2007-03-30 | 2011-11-09 | ヤマハ発動機株式会社 | 実装機、その実装方法および実装機における基板撮像手段の移動方法 |
-
2011
- 2011-05-20 JP JP2011113770A patent/JP2012240166A/ja active Pending
-
2012
- 2012-03-14 US US13/419,462 patent/US20120296469A1/en not_active Abandoned
- 2012-05-14 DE DE102012104196A patent/DE102012104196A1/de not_active Withdrawn
- 2012-05-18 CN CN201210157494.5A patent/CN102806555A/zh active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1119895A (ja) * | 1997-06-30 | 1999-01-26 | Ando Electric Co Ltd | 吸着ハンドの昇降機構および制御方法 |
| JP2001205584A (ja) * | 2000-01-26 | 2001-07-31 | Matsushita Electric Works Ltd | ロボットハンド |
| JP2010012567A (ja) * | 2008-07-04 | 2010-01-21 | Fanuc Ltd | 物品取り出し装置 |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2781315A1 (en) | 2013-03-18 | 2014-09-24 | Kabushiki Kaisha Yaskawa Denki | Robot picking system, control device and method of manufacturing a workpiece |
| US9132548B2 (en) | 2013-03-18 | 2015-09-15 | Kabushiki Kaisha Yaskawa Denki | Robot picking system, control device and method of manufacturing a workpiece |
| DE102014109262A1 (de) | 2013-07-04 | 2015-01-08 | Fanuc Corporation | Umsetzvorrichtung zum Ansaugen und Umsetzen eines Objekts |
| US9381651B2 (en) | 2013-07-04 | 2016-07-05 | Fanuc Corporation | Transfer device sucking and transferring object |
| DE102014109262B4 (de) * | 2013-07-04 | 2017-02-09 | Fanuc Corporation | Umsetzvorrichtung zum Ansaugen und Umsetzen eines Objekts |
| JP2015047660A (ja) * | 2013-08-30 | 2015-03-16 | ファナック株式会社 | 磁石搬送位置決め装置 |
| US9150358B2 (en) | 2013-08-30 | 2015-10-06 | Fanuc Corporation | Magnet conveyance positioning device |
| JP2015085435A (ja) * | 2013-10-30 | 2015-05-07 | Thk株式会社 | 作業装置 |
| CN105201809A (zh) * | 2014-06-20 | 2015-12-30 | 中联重科股份有限公司 | 混凝土泵车及检测其泵送效率的检测装置、系统、方法 |
| CN105201809B (zh) * | 2014-06-20 | 2017-06-09 | 中联重科股份有限公司 | 混凝土泵车及检测其泵送效率的检测装置、系统、方法 |
| WO2018139243A1 (ja) * | 2017-01-27 | 2018-08-02 | 日本電産サンキョー株式会社 | パネル搬送ロボット |
| JP2018118357A (ja) * | 2017-01-27 | 2018-08-02 | 日本電産サンキョー株式会社 | パネル搬送ロボット |
| JP2019198950A (ja) * | 2018-05-18 | 2019-11-21 | ファナック株式会社 | バラ積みされたワークを取り出すロボットシステムおよびロボットシステムの制御方法 |
| US11027433B2 (en) | 2018-05-18 | 2021-06-08 | Fanuc Corporation | Robot system and control method of robot system for taking out workpieces loaded in bulk |
| WO2020080478A1 (ja) * | 2018-10-19 | 2020-04-23 | Thk株式会社 | アクチュエータシステム |
| CN112867588A (zh) * | 2018-10-19 | 2021-05-28 | Thk株式会社 | 致动器系统 |
| JPWO2020080478A1 (ja) * | 2018-10-19 | 2021-09-09 | Thk株式会社 | アクチュエータシステム |
| JP7223023B2 (ja) | 2018-10-19 | 2023-02-15 | Thk株式会社 | アクチュエータシステム |
| US11911891B2 (en) | 2018-10-19 | 2024-02-27 | Thk Co., Ltd. | Actuator system |
| CN112867588B (zh) * | 2018-10-19 | 2024-03-26 | Thk株式会社 | 致动器系统 |
| KR102187190B1 (ko) * | 2019-06-26 | 2020-12-04 | 주식회사 온코퀘스트파마슈티컬 | 자동차 내장재 성형장치 |
| CN115339858A (zh) * | 2022-08-08 | 2022-11-15 | 安徽鑫民玻璃股份有限公司 | 一种用于玻璃杯生产的翻转装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20120296469A1 (en) | 2012-11-22 |
| DE102012104196A1 (de) | 2012-11-22 |
| CN102806555A (zh) | 2012-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012240166A (ja) | ビジョンセンサ及び吸引装置を備えた吸着搬送装置 | |
| JP6305213B2 (ja) | 取出装置および方法 | |
| US9665946B2 (en) | Article conveyor system | |
| JP5085749B2 (ja) | 棒状部材の搬送装置 | |
| EP3173194B1 (en) | Manipulator system, image capturing system, transfer method of object, and carrier medium | |
| JP2010069542A (ja) | バラ積みピッキング装置におけるワークピッキング方法 | |
| JP4565023B2 (ja) | 物品取り出し装置 | |
| JP6545936B2 (ja) | 部品搬送システム及び姿勢調整器具 | |
| EP2899148A1 (en) | Parallel link robot, hand for parallel link robot, and parallel link robot system | |
| US20140079524A1 (en) | Robot system and workpiece transfer method | |
| JP2013078825A (ja) | ロボット装置、ロボットシステムおよび被加工物の製造方法 | |
| JP2019198950A (ja) | バラ積みされたワークを取り出すロボットシステムおよびロボットシステムの制御方法 | |
| JP2011143496A (ja) | トレイ移載装置及び方法 | |
| JP2018203527A (ja) | 荷役装置、及び、荷役装置の動作方法 | |
| JP2023115274A (ja) | 取出装置 | |
| JP2018052682A (ja) | 移載装置 | |
| JP2020044588A (ja) | 物品移動装置およびロボットアームのエンドエフェクタ | |
| JP6600026B2 (ja) | 取出装置および方法 | |
| JP2011156610A (ja) | ロボットハンド及び搬送ロボット | |
| JP2015196235A (ja) | ワーク搬送システム | |
| JP2019016294A (ja) | 情報処理装置、情報処理方法、情報処理プログラム、及びシステム | |
| CN204868885U (zh) | 用于操控工件的机器人系统 | |
| JP2016023045A (ja) | ワーク搬送方法及びワーク搬送システム | |
| JP2014172047A (ja) | ワーク搬送方法及びワーク搬送システム | |
| JP2013173196A (ja) | ロボットのハンドリングアームの位置補正方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121030 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121221 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130122 |