JP2012201116A - ハイブリッド車の走行駆動装置 - Google Patents
ハイブリッド車の走行駆動装置 Download PDFInfo
- Publication number
- JP2012201116A JP2012201116A JP2011064290A JP2011064290A JP2012201116A JP 2012201116 A JP2012201116 A JP 2012201116A JP 2011064290 A JP2011064290 A JP 2011064290A JP 2011064290 A JP2011064290 A JP 2011064290A JP 2012201116 A JP2012201116 A JP 2012201116A
- Authority
- JP
- Japan
- Prior art keywords
- engine
- transmission
- gear
- power
- input shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/02—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion
- F16H3/08—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts
- F16H3/087—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears
- F16H3/093—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears with two or more countershafts
- F16H2003/0931—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears with two or more countershafts each countershaft having an output gear meshing with a single common gear on the output shaft
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/003—Transmissions for multiple ratios characterised by the number of forward speeds
- F16H2200/0052—Transmissions for multiple ratios characterised by the number of forward speeds the gear ratios comprising six forward speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/02—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion
- F16H3/08—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts
- F16H3/087—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears
- F16H3/089—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears all of the meshing gears being supported by a pair of parallel shafts, one being the input shaft and the other the output shaft, there being no countershaft involved
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Abstract
【解決手段】エンジン10、電動モータ39及び変速機部1を備えたハイブリッド車の走行駆動装置であって、変速機部1は、前記エンジン10に隣接して配置され、一端部にエンジン10から動力が伝達されるとともに他端部がエンジン10から離間する方向に延びる動力伝達軸3、第1の入力軸4及び第2の入力軸5と、複数の変速段の変速ギヤ31〜37とを有し、変速ギヤ31〜37は2つのグループに分けられ当該グループ毎にまとめて第1の入力軸4及び第2の入力軸5に並べるように配置され、電動モータ39は、エンジン10に近いグループの変速段のうちの最も近い2速ギヤ32の2速用遊転ギヤ32bに動力を伝達可能にするとともに、その動力伝達部よりエンジン10から離間する方向に本体部が延びるように配置する。
【選択図】図1
Description
しかしながら、極力シンプルかつコンパクトな構成でモータと変速機とを接続しようとすると、モータを変速機のいずれの変速段に接続するかによって、変速機に対するモータの位置が定まってしまい、モータを接続する変速段、及びその変速段の変速機内での位置によってはモータの一部が走行駆動装置の中で突出するような構造となって、走行駆動装置全体の寸法が増加し、車両への搭載が困難となる虞がある。
また、請求項3の発明は、請求項1または2において、エンジンと変速機との間にクラッチと、エンジンから離間する方向に延びてクラッチを介してエンジンから動力を伝達する動力伝達軸とが備えられ、入力軸は、複数のグループに分けられた変速段のうちの第1のグループの変速段の変速ギヤが設けられた第1の入力軸と、複数のグループに分けられた変速段のうちの第2のグループの変速段の変速ギヤが設けられた第2の入力軸と、により構成されるとともに、変速機は、第1の入力軸及び第2の入力軸のいずれか一方を動力伝達軸に選択的に接続する切換手段を備えたことを特徴とする。
また、請求項5の発明は、請求項3または4において、第2の入力軸は中空状に形成されるとともに、動力伝達軸は第2の入力軸に挿入されるように配置されることを特徴とする。
また、本発明の請求項3のハイブリッド車の走行駆動装置によれば、切換手段を切換えることで、第1のグループ及び第2のグループのいずれか一方の変速段の変速ギヤを介してエンジンから出力軸に動力が伝達可能となるので、エンジンは2つのグループのいずれの変速段でも出力軸に動力が伝達して走行可能となる。また、モータは第2のグループの変速段で出力軸に動力が伝達され走行可能となる。
そして、エンジンと変速機との間にクラッチが設けられているので、モータがクラッチに干渉せずに十分な大きさを確保しつつ、クラッチを含めエンジン、モータ、変速機を備えた走行駆動装置をコンパクト化することができる。
本発明は、走行駆動源としてエンジン10及び電動モータ39を備えたハイブリッド車に適用される。
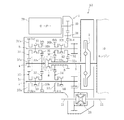
図1は、本発明の第1の実施形態に係るハイブリッド車の走行駆動装置50の構成図である。
変速機部1は、1個のクラッチ2と、1本の動力伝達軸3と、2本の入力軸(第1の入力軸4、第2の入力軸5)と、2本の副軸6、7と、切換機構8(切換手段)と、を備えている。
第1の副軸6及び第2の副軸7は、動力伝達軸3、第1の入力軸4及び第2の入力軸5と軸線が平行になるように夫々離間して配置されているとともに、デフ20及びドライブシャフト21を介して、図示しない走行駆動輪に動力を伝達可能に構成されている。
また、第1の副軸6には、1速用遊転ギヤ31b、2速用遊転ギヤ32b、5速用遊転ギヤ35b及び6速用遊転ギヤ36bが、第1の副軸6に対して相対回転可能に枢支されている。第2の副軸7には、3速用遊転ギヤ33b、4速用遊転ギヤ34b及びリバース用遊転ギヤ37bが、第2の副軸7に対して相対回転可能に枢支されている。リバース用遊転ギヤ37bは、1速用遊転ギヤ31bに噛合するように配置されている。
変速機部1には、シンクロスリーブ41、42、43、44が備えられており、シンクロスリーブ41〜44は、図示しないシフトフォークによって第1の副軸6または第2の副軸7の軸線に沿ってスライド移動させられる。このうち第1のシンクロスリーブ41及び第2のシンクロスリーブ42は、第1の副軸6の軸線に沿ってスライド移動可能に設置されている。第3のシンクロスリーブ43及び第4のシンクロスリーブ44は、第2の副軸7の軸線に沿ってスライド移動可能に設置されている。
次に、図2〜5を用いて、ハイブリッド車の各運転状況における変速機部1での作動及び動力の伝達状態を説明する。図2〜5は各運転状況での動力の伝達状態を示す説明図であり、図2は電動モータ39によるエンジン始動時及び停車中の発電時、図3は電動モータ39のみによる走行時、図4は、エンジン10のみによる走行時、図5はエンジン10による走行中での電動モータ39による駆動アシスト時及び動力回生時を示す。なお、図2〜5において、変速機部1内での動力の伝達路を太線にて示している。
また、本実施形態では、切換機構8を用いることで、クラッチ2を2個から1個に減らしても、上記のようにダブルクラッチ式変速装置と同様にプレシフトが可能となるので、ダブルクラッチ式変速装置と比較して、比較的大型な部品であるクラッチ2の個数が減少する分、走行駆動装置50全体の小型化を図ることができる。
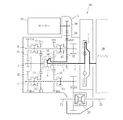
図6は、本発明の第2の実施形態に係る走行駆動装置60の構成図である。
本発明の第2の実施形態の走行駆動装置60の変速機部51では、上記第1の実施形態の変速機部1に対して、切換機構8が偶数段の変速ギヤ32、34、36の外側でクラッチ2との間に配置される点が異なる。この位置は、第1の副軸6及び第2の副軸7の出力側の端部のギヤの間である。したがって、変速機部51の軸方向の寸法を抑制し、変速機部51、延いては走行駆動装置60を更に小型化することができる。
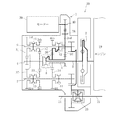
また、以上の実施形態ではエンジン横置きのハイブリッド車に本発明を適用しているが、エンジン縦置きのハイブリッド車にも適用可能である。
図7に示すように、走行駆動装置70の変速機部71は、エンジン10の縦置きに伴って、動力伝達軸3及び各入力軸4、5が車両前後方向に延びるように配置されている。
本実施形態では、変速機部71の各遊転ギヤ31b〜37bを枢支する副軸72が1本となっており、この副軸72の後端部にデフ20が接続されている点が第1の実施形態と異なる。また、第1の入力軸4には1速用固定ギヤ31a、3速用固定ギヤ33a、5速用固定ギヤ35a及びリバース用固定ギヤ37aが固定され、第2の入力軸5には2速用固定ギヤ32a、4速用固定ギヤ34a及び6速用固定ギヤ36aが固定されており、各変速段の固定ギヤ31a〜36aと対応する遊転ギヤ31b〜36bとで各変速ギヤ31〜36を構成している。リバースギヤ37は、リバース用固定ギヤ37aとリバース用中間ギヤ37cとリバース用遊転ギヤ37bとで構成されている。
2 クラッチ
3 動力伝達軸
4 第1の入力軸
5 第2の入力軸
8 切換機構
10 エンジン
21 ドライブシャフト
39 電動モータ
50、60、70 走行駆動装置
Claims (5)
- 駆動源としてエンジン及びモータを備え、前記エンジン及び前記モータから変速機を介して走行駆動輪に動力を出力するハイブリッド車の走行駆動装置であって、
前記変速機は、前記エンジンに隣接して配置され、エンジンから離間する方向に延びる入力軸と、複数の変速段の変速ギヤとを有し、前記変速ギヤは複数のグループに分けられ当該グループ毎にまとめて前記入力軸に並べるように配置され、
前記モータは、前記複数のグループのうちの前記エンジンに近い位置に配置されたグループの変速ギヤに動力を伝達可能であるとともに、動力伝達部から前記エンジンから離間する方向に本体部が延びるように構成されたことを特徴とするハイブリッド車の走行駆動装置。 - 前記モータは、最も前記エンジンに近い位置に配置された前記変速ギヤに動力を伝達可能に構成されたことを特徴とする請求項1に記載のハイブリッド車の走行駆動装置。
- 前記エンジンと前記変速機との間にクラッチと、
エンジンから離間する方向に延びて前記クラッチを介して前記エンジンから動力を伝達する動力伝達軸と、が備えられ、
前記入力軸は、複数のグループに分けられた前記変速段のうちの第1のグループの変速段の変速ギヤが設けられた第1の入力軸と、複数のグループに分けられた変速段のうちの第2のグループの変速段の変速ギヤが設けられた第2の入力軸と、により構成されるとともに、
前記変速機は、第1の入力軸及び第2の入力軸のいずれか一方を動力伝達軸に選択的に接続する切換手段を備えたことを特徴とする請求項1または2に記載のハイブリッド車の走行駆動装置。 - 前記第1のグループ及び前記第2のグループは、何れか一方が奇数の変速段であり、他方が偶数の変速段であることを特徴とする請求項3に記載のハイブリッド車の走行駆動装置。
- 前記第2の入力軸は中空状に形成されるとともに、前記動力伝達軸は前記第2の入力軸に挿入されるように配置されることを特徴とする請求項3または4に記載のハイブリッド車の走行駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011064290A JP2012201116A (ja) | 2011-03-23 | 2011-03-23 | ハイブリッド車の走行駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011064290A JP2012201116A (ja) | 2011-03-23 | 2011-03-23 | ハイブリッド車の走行駆動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012201116A true JP2012201116A (ja) | 2012-10-22 |
Family
ID=47182558
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011064290A Pending JP2012201116A (ja) | 2011-03-23 | 2011-03-23 | ハイブリッド車の走行駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012201116A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014097688A (ja) * | 2012-11-13 | 2014-05-29 | Aisin Ai Co Ltd | ハイブリッド車の動力伝達装置 |
| JP2014097689A (ja) * | 2012-11-13 | 2014-05-29 | Aisin Ai Co Ltd | ハイブリッド車の動力伝達装置 |
| JP2014136496A (ja) * | 2013-01-17 | 2014-07-28 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| JP2014136497A (ja) * | 2013-01-17 | 2014-07-28 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| ITUA20162222A1 (it) * | 2016-04-01 | 2017-10-01 | Dana Graziano Srl | Sistema di trasmissione del moto per veicolo a propulsione ibrida. |
| CN110435409A (zh) * | 2018-05-03 | 2019-11-12 | 舍弗勒技术股份两合公司 | 混合动力变速器和混合动力车辆 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09156388A (ja) * | 1995-12-06 | 1997-06-17 | Toyota Motor Corp | ハイブリッド駆動装置 |
| JP2002114063A (ja) * | 2000-07-28 | 2002-04-16 | Aisin Seiki Co Ltd | ハイブリッド車両用動力伝達装置 |
| JP2002526326A (ja) * | 1998-10-02 | 2002-08-20 | ルーク ラメレン ウント クツプルングスバウ ベタイリグングス コマンディートゲゼルシャフト | 少なくとも2つの軸、及び、電気機械又は自動的なディスククラッチを有する伝動装置 |
| JP2008516827A (ja) * | 2004-10-16 | 2008-05-22 | ダイムラー・アクチェンゲゼルシャフト | トランスミッションセット及びハイブリッド用ツインクラッチトランスミッション |
-
2011
- 2011-03-23 JP JP2011064290A patent/JP2012201116A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09156388A (ja) * | 1995-12-06 | 1997-06-17 | Toyota Motor Corp | ハイブリッド駆動装置 |
| JP2002526326A (ja) * | 1998-10-02 | 2002-08-20 | ルーク ラメレン ウント クツプルングスバウ ベタイリグングス コマンディートゲゼルシャフト | 少なくとも2つの軸、及び、電気機械又は自動的なディスククラッチを有する伝動装置 |
| JP2002114063A (ja) * | 2000-07-28 | 2002-04-16 | Aisin Seiki Co Ltd | ハイブリッド車両用動力伝達装置 |
| JP2008516827A (ja) * | 2004-10-16 | 2008-05-22 | ダイムラー・アクチェンゲゼルシャフト | トランスミッションセット及びハイブリッド用ツインクラッチトランスミッション |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014097688A (ja) * | 2012-11-13 | 2014-05-29 | Aisin Ai Co Ltd | ハイブリッド車の動力伝達装置 |
| JP2014097689A (ja) * | 2012-11-13 | 2014-05-29 | Aisin Ai Co Ltd | ハイブリッド車の動力伝達装置 |
| JP2014136496A (ja) * | 2013-01-17 | 2014-07-28 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| JP2014136497A (ja) * | 2013-01-17 | 2014-07-28 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| ITUA20162222A1 (it) * | 2016-04-01 | 2017-10-01 | Dana Graziano Srl | Sistema di trasmissione del moto per veicolo a propulsione ibrida. |
| WO2017168377A1 (en) * | 2016-04-01 | 2017-10-05 | Oerlikon Graziano S.P.A. | Transmission system for a hybrid propulsion vehicle |
| CN110435409A (zh) * | 2018-05-03 | 2019-11-12 | 舍弗勒技术股份两合公司 | 混合动力变速器和混合动力车辆 |
| CN110435409B (zh) * | 2018-05-03 | 2023-11-24 | 舍弗勒技术股份两合公司 | 混合动力变速器和混合动力车辆 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6234779B2 (ja) | ダブルクラッチ変速機 | |
| JP2012201117A (ja) | ハイブリッド車の変速装置 | |
| JP5924476B2 (ja) | ハイブリッド車用変速装置 | |
| JP4942212B2 (ja) | ハイブリッド動力装置 | |
| JP5312481B2 (ja) | ハイブリット車両の動力伝達装置 | |
| JP5659553B2 (ja) | ハイブリッド駆動装置 | |
| JP5783374B2 (ja) | 車両用変速装置 | |
| JP6080239B2 (ja) | ハイブリッド車両 | |
| WO2010055905A1 (ja) | トランスミッション | |
| JP6685157B2 (ja) | ハイブリッド車両の変速装置 | |
| JP2016070481A (ja) | 車両用変速装置 | |
| JP2013169831A (ja) | ハイブリット車両 | |
| JP2008069832A (ja) | 自動車用駆動装置 | |
| JP2007332991A (ja) | 歯車変速装置 | |
| JP2010162924A (ja) | ハイブリット車両の動力伝達装置 | |
| WO2013008545A1 (ja) | 変速装置 | |
| KR101637740B1 (ko) | 하이브리드 차량용 파워트레인 | |
| JP2009156305A (ja) | 複数クラッチ式変速機 | |
| JP2009248730A (ja) | ハイブリッド動力装置 | |
| JP2015140127A (ja) | ハイブリッド車両用変速機 | |
| JP2012201116A (ja) | ハイブリッド車の走行駆動装置 | |
| KR20150012150A (ko) | 차량용 변속장치 | |
| JP4775242B2 (ja) | 車両用駆動装置 | |
| JP2008309332A (ja) | ツインクラッチ式変速機 | |
| JP2015209156A (ja) | 変速装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130322 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131217 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140212 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20140212 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20140212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140903 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150107 |