JP2012196095A - 回転電機システム - Google Patents
回転電機システム Download PDFInfo
- Publication number
- JP2012196095A JP2012196095A JP2011059860A JP2011059860A JP2012196095A JP 2012196095 A JP2012196095 A JP 2012196095A JP 2011059860 A JP2011059860 A JP 2011059860A JP 2011059860 A JP2011059860 A JP 2011059860A JP 2012196095 A JP2012196095 A JP 2012196095A
- Authority
- JP
- Japan
- Prior art keywords
- stator
- rotor
- current
- winding
- magnetomotive force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K19/00—Synchronous motors or generators
- H02K19/02—Synchronous motors
- H02K19/10—Synchronous motors for multi-phase current
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K19/00—Synchronous motors or generators
- H02K19/16—Synchronous generators
- H02K19/26—Synchronous generators characterised by the arrangement of exciting windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2205/00—Indexing scheme relating to controlling arrangements characterised by the control loops
- H02P2205/05—Torque loop, i.e. comparison of the motor torque with a torque reference
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2209/00—Indexing scheme relating to controlling arrangements characterised by the waveform of the supplied voltage or current
- H02P2209/13—Different type of waveforms depending on the mode of operation
Abstract
【解決手段】回転電機10は、複数相のステータ巻線を有し、この複数相のステータ巻線へ供給されるそれぞれ位相の異なるステータ電流に応じたステータ起磁力を発生するステータと、前記ステータにより発生されたステータ起磁力に応じて発生するロータ電流を流す複数のロータ巻線であってロータ電流の方向が一方向または反対方向に規制された複数のロータ巻線を含み、各ロータ巻線はロータ電流の方向に応じて極性が異なるロータ起磁力を発生して回転するロータと、を有する。そして、制御部38は、目標トルクに応じてステータ巻線への供給電流を制御するとともに、パルス重畳部86において、ステータ電流にパルスを重畳することで、ステータおよびロータにおける銅損が最小になるように、前記ステータ電流と、前記ロータ電流の比を調整する。
【選択図】図4
Description
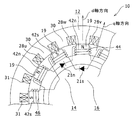
図2に、回転電機10の構成が示されている。このように、回転電機10は、互いに径方向に対向配置されたステータ12と内側に同心配置されたロータ14とを備える。
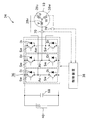
図4は制御装置38のうち、インバータ制御部の構成を示す図である。制御装置38は、電流指令算出部(図示せず)と、パルス生成部84、パルス重畳部86と、減算部74,75と、PI演算部76,77と、3相/2相変換部78と、2相/3相変換部80と、図示しないPWM信号生成部及びゲート回路とを含む。また、回転電機10には、回転角度検出部82が設けられ、ロータ位置(角度)θが検出される。
ここで、回転電機10の出力トルクについて考えると、この出力トルクは、
(出力トルク)=(誘導電流によるトルク)+(リラクタンストルク)
である。これを式で表すと、次のようになる。
(出力トルク)=pn[(Mrqsinβ/√6NrNs)ATr・ATs
+{((Lq−Ld)sin2β)/3Ns 2}ATs 2]
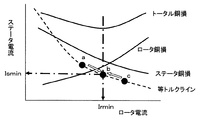
(トータル銅損)=(ロータ銅損)+(ステータ銅損)
であり、これを式で表すと次のようになる。
(トータル銅損)=pnρ{(Lr/2Sr)ATr 2+(2Ls/3Ss)ATs 2
Claims (2)
- 複数相のステータ巻線を有し、この複数相のステータ巻線へ供給されるそれぞれ位相の異なるステータ電流に応じたステータ起磁力を発生するステータと、
前記ステータにより発生されたステータ起磁力に応じて発生するロータ電流によって磁極が形成されるようにロータ巻線が巻かれたロータと、
前記ロータ電流の流れる方向を一方向に規制することによって前記磁極の極性を規制する規制部と、
前記ステータ電流を制御する制御部と、
を有し、
前記制御部は、目標トルクに応じてステータ巻線への供給電流を制御するとともに、前記ステータ電流にパルスを重畳することで、ステータおよびロータにおける銅損が最小になるように、前記ステータ電流と、前記ロータ電流の比を調整することを特徴とする回転電機システム。 - 請求項1に記載の回転電機システムであって、
前記制御部は、前記ステータ電流とロータ電流の比を所定値に制御することを特徴とする回転電機システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011059860A JP2012196095A (ja) | 2011-03-17 | 2011-03-17 | 回転電機システム |
| US13/422,184 US8742710B2 (en) | 2011-03-17 | 2012-03-16 | Rotary electric machine system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011059860A JP2012196095A (ja) | 2011-03-17 | 2011-03-17 | 回転電機システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012196095A true JP2012196095A (ja) | 2012-10-11 |
Family
ID=46827930
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011059860A Pending JP2012196095A (ja) | 2011-03-17 | 2011-03-17 | 回転電機システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8742710B2 (ja) |
| JP (1) | JP2012196095A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018217737A1 (de) | 2017-10-20 | 2019-04-25 | Suzuki Motor Corporation | Rotierende elektrische Maschine |
| JP7367373B2 (ja) | 2019-07-31 | 2023-10-24 | マツダ株式会社 | モータ制御システム |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2672624B1 (en) * | 2012-06-05 | 2014-10-29 | Siemens Aktiengesellschaft | Current controller and generator system |
| JP5626306B2 (ja) * | 2012-10-09 | 2014-11-19 | トヨタ自動車株式会社 | 回転電機制御システム |
| US9209733B2 (en) * | 2012-11-21 | 2015-12-08 | National Cheng Kung University | Control method for controlling a current vector controlled synchronous reluctance motor |
| JP6176217B2 (ja) * | 2014-10-02 | 2017-08-09 | トヨタ自動車株式会社 | 磁石レス回転電機 |
| CN109687802B (zh) * | 2018-12-21 | 2020-12-29 | 河海大学 | 一种快速计算永磁同步电机中永磁体高频涡流损耗的方法 |
| DE102019125590A1 (de) * | 2019-09-24 | 2021-03-25 | Wirtgen Gmbh | Überwachungsvorrichtung für einen Gleitschalungsfertiger zur Überwachung der Verdichtung von Beton und Verfahren zur Überwachung der Verdichtung von Beton während des Betriebs eines Gleitschalungsfertigers |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008109759A (ja) * | 2006-10-24 | 2008-05-08 | Mitsubishi Electric Corp | 回転電機の制御装置 |
| JP2008545363A (ja) * | 2005-07-06 | 2008-12-11 | エルコン リミテッド | 電動機 |
| JP2009268191A (ja) * | 2008-04-23 | 2009-11-12 | Toshiba Corp | モータ制御装置,モータ駆動システム,洗濯機,空調機,永久磁石モータの着磁量変更方法 |
| JP2010110079A (ja) * | 2008-10-29 | 2010-05-13 | Denso Corp | 界磁巻線型同期機の制御装置及び制御システム |
| JP2011041433A (ja) * | 2009-08-18 | 2011-02-24 | Toyota Central R&D Labs Inc | 回転電機駆動システム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5120586B2 (ja) | 2005-06-28 | 2013-01-16 | 株式会社デンソー | 界磁巻線型同期機 |
| JP5302527B2 (ja) * | 2007-10-29 | 2013-10-02 | 株式会社豊田中央研究所 | 回転電機及びその駆動制御装置 |
| JP5097081B2 (ja) | 2008-10-20 | 2012-12-12 | 株式会社日本自動車部品総合研究所 | 界磁巻線型同期機 |
| JP2010221856A (ja) * | 2009-03-24 | 2010-10-07 | Hitachi Automotive Systems Ltd | 操舵制御装置 |
| JP5781785B2 (ja) | 2011-02-15 | 2015-09-24 | トヨタ自動車株式会社 | 回転電機駆動システム |
-
2011
- 2011-03-17 JP JP2011059860A patent/JP2012196095A/ja active Pending
-
2012
- 2012-03-16 US US13/422,184 patent/US8742710B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008545363A (ja) * | 2005-07-06 | 2008-12-11 | エルコン リミテッド | 電動機 |
| JP2008109759A (ja) * | 2006-10-24 | 2008-05-08 | Mitsubishi Electric Corp | 回転電機の制御装置 |
| JP2009268191A (ja) * | 2008-04-23 | 2009-11-12 | Toshiba Corp | モータ制御装置,モータ駆動システム,洗濯機,空調機,永久磁石モータの着磁量変更方法 |
| JP2010110079A (ja) * | 2008-10-29 | 2010-05-13 | Denso Corp | 界磁巻線型同期機の制御装置及び制御システム |
| JP2011041433A (ja) * | 2009-08-18 | 2011-02-24 | Toyota Central R&D Labs Inc | 回転電機駆動システム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018217737A1 (de) | 2017-10-20 | 2019-04-25 | Suzuki Motor Corporation | Rotierende elektrische Maschine |
| FR3072835A1 (fr) | 2017-10-20 | 2019-04-26 | Suzuki Motor Corporation | Machine electrique rotative |
| JP7367373B2 (ja) | 2019-07-31 | 2023-10-24 | マツダ株式会社 | モータ制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US8742710B2 (en) | 2014-06-03 |
| US20120235621A1 (en) | 2012-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5718668B2 (ja) | 回転電機駆動システム | |
| JP5781785B2 (ja) | 回転電機駆動システム | |
| JP5827026B2 (ja) | 回転電機及び回転電機駆動システム | |
| JP2012196095A (ja) | 回転電機システム | |
| JP5409680B2 (ja) | 回転電機システム | |
| JP5363913B2 (ja) | 回転電機駆動システム | |
| US20120256510A1 (en) | Rotary electric machine | |
| JP4032516B2 (ja) | 自動車用電動駆動装置 | |
| JP5803559B2 (ja) | 回転電機制御装置 | |
| JP6711326B2 (ja) | 回転電機の駆動システム | |
| JP2007274779A (ja) | 電動駆動制御装置及び電動駆動制御方法 | |
| JP5626306B2 (ja) | 回転電機制御システム | |
| JP5760895B2 (ja) | 回転電機制御システム | |
| JP6075161B2 (ja) | スイッチトリラクタンスモータの制御装置 | |
| JP2009254101A (ja) | 充電制御装置およびそれを備えた車両 | |
| JP2009296835A (ja) | モータ制御装置 | |
| JP5194608B2 (ja) | 回転電機制御装置 | |
| JP5623346B2 (ja) | 回転電機駆動システム | |
| JP2021090238A (ja) | 制御装置 | |
| JP6928149B1 (ja) | 交流回転電機の制御装置 | |
| JP2014064340A (ja) | 励磁式回転電機の制御装置 | |
| JP6405960B2 (ja) | スイッチトリラクタンスモータの制御装置 | |
| JP2014166074A (ja) | 磁石レス巻線界磁モータの駆動回路 | |
| JP2013132101A (ja) | 回転電機の駆動制御装置およびこれを備えた回転電機の駆動装置 | |
| JP2009296834A (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130305 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131015 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140304 |