JP2012118071A - 光学系の光学面の間隔を測定する方法及び装置 - Google Patents
光学系の光学面の間隔を測定する方法及び装置 Download PDFInfo
- Publication number
- JP2012118071A JP2012118071A JP2011259391A JP2011259391A JP2012118071A JP 2012118071 A JP2012118071 A JP 2012118071A JP 2011259391 A JP2011259391 A JP 2011259391A JP 2011259391 A JP2011259391 A JP 2011259391A JP 2012118071 A JP2012118071 A JP 2012118071A
- Authority
- JP
- Japan
- Prior art keywords
- optical
- optical system
- reference axis
- axis
- lens
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/0209—Low-coherence interferometers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/26—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes
- G01B11/27—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes for testing the alignment of axes
- G01B11/272—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes for testing the alignment of axes using photoelectric detection means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02015—Interferometers characterised by the beam path configuration
- G01B9/02025—Interference between three or more discrete surfaces
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M11/00—Testing of optical apparatus; Testing structures by optical methods not otherwise provided for
- G01M11/02—Testing optical properties
- G01M11/0221—Testing optical properties by determining the optical axis or position of lenses
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Instruments For Measurement Of Length By Optical Means (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
【解決手段】多レンズ光学系(38)の光学面(S1、S2、S3)の間隔を測定する方法の場合に、光学系のセンタリング状態は、光学系(38)の少なくとも2つの光学面(S1、S2、S3)を考慮することにより記録される。光学系(38)は、センタリング状態を考慮して、光学系(38)の光軸(40)が参照軸(34)とできる限り揃うように調節される。次のステップでは、光学面(S1、S2、S3)の間隔が、短コヒーレンス干渉計(24)を用いて決定される。この目的のために光学系(38)に向けられる測定光線(50)は、参照軸(34)に沿っている。試験片(38)の事前の調節により、光学系の少なくとも2つの光学面を考慮して、高精度の測定が得られる。
【選択図】図5
Description
b)ステップa)で記録されたセンタリング状態を考慮して、手動又は外力補助(extraneous-force-assisted)による光学系の調節を行うステップ、
c)光学系に、参照軸に沿って伝わる測定光線を通過させるステップ、
d)光学面から反射された測定光線の一部を参照光線と干渉計で重畳させるステップ、
e)反射された一部と参照光線との間の干渉現象を記録及び評価することにより、参照軸に沿った光学面の間隔を決定するステップ。
図1は、子午的断面図で、10により全体が示される光学系を示す。光学系は、7枚のレンズL1〜L7を有する。2枚のレンズL3及びL4は、隙間なく1つに接合されており、アクロマート(achromat)として用いられるダブレット(doublet)を形成する。レンズL1〜L7は、いかなる場合も不図示のレンズマウントに収容される、円筒状に研磨されたレンズ縁12を有する。

図5に子午的断面図で示され、20により全体が示される測定装置は、例えば問題のCCDセンサ又は位置敏感(position-sensitive)ダイオード(PSD)である、位置決定光学センサ22と、干渉計24とを有する。測定装置20は、コンピュータ26の形式の計算ユニットと、輪状回転テーブル30により支持される試験片レセプタクル(test-specimen receptacle)28とをさらに有する。回転テーブル30は、その上に配置された試験片レセプタクル28と共に、矢印36により示されるように、モータ32を用いて参照軸34の周りを回転可能である。回転テーブル30は、モータ32と共に、測定装置20の回転機構を構成する。
以下では、本発明の測定方法が、図7〜9を参照してより詳細に説明される。
最初に、試験片38に向けられる、干渉計24の測定光線50は、回転テーブル30の回転軸により定義される参照軸34に沿って正確に伝わると仮定する。そのような調節は、測定装置を初めて作動させる前に、一度だけ行われる。
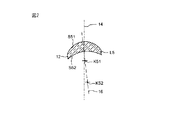
実際の間隔測定の前に行われなければならない試験片38の調節を説明するために、測定装置20の必須要素を拡大して示す図7が参照される。
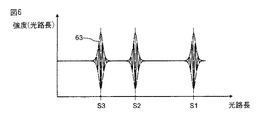
上述の調節の後に、試験片38は、光軸40が参照軸34と揃うように、参照軸34に対して正しい方向に置かれている。レンズL3及びL4は、参照軸34に対してわずかに偏心(tilted)しているだけである。表面S1、S2、及びS3の間隔が、干渉計24を用いて、図5を参照して上述した方法で測定されれば、測定光線50は、表面S1、S2、及びS3をほぼ垂直に通過する。結果として、一方で、表面S1、S2、及びS3から反射される測定光線は、最大強度を有し、この理由により、参照光線52と重畳して光検出器62で明確に識別可能な干渉信号を生成することが保証される。他方で、参照軸34に対する試験片38の光軸40の方向付けにより、光学面S1、S2、及びS3の間隔は、実際に試験片38の光軸に沿って測定されることが保証される。
以下では、図10が参照される。図10は、本発明の方法の必須ステップが列挙されるフローチャートを示す。第1ステップST1では、試験片38又はごく一般に単レンズ若しくは多レンズ光学系の光学面のうち少なくとも2つ、優先的にすべてを考慮して、そのセンタリング状態が記録される。第2ステップST2では、試験片38が、その光軸40が参照軸38とできる限り正確に揃うように、優先的に調節される。第3ステップST3では、試験片38が、測定光線50を通過させられる。第4ステップST4では、試験片38から反射された測定光が、参照光と干渉計24で重畳させられる。第5ステップST5では、表面間隔が、光検出器62で干渉現象を評価することにより決定される。
Claims (8)
- 単レンズ又は多レンズ光学系(38)の光学面(S1、S2、S3)の間隔を測定する方法であって、
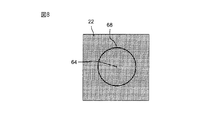
a)前記光学系(38)内のすべての光学面が考慮されるように、参照軸(34)に沿って伝わる試験光線(50)を前記光学系(38)に向け、前記試験光線が前記光学系(38)を完全に通過した後に、前記試験光線が位置決定光学センサ(22)に当たる位置(66)を記録することにより、前記光学系(38)のセンタリング状態を記録するステップと、
b)ステップa)で記録された前記センタリング状態を考慮して、前記光学系(38)を調節するステップと、
c)前記光学系(38)に、前記参照軸(34)に沿って伝わる測定光線(50)を通過させるステップと、
d)前記光学面(S1、S2、S3)から反射された前記測定光線の一部(60)を参照光線(52)と干渉計(24)で重畳させるステップと、
e)前記反射された一部(60)と前記参照光線(52)との間の干渉現象を記録及び評価することにより、前記参照軸(34)に沿った前記光学面(S1、S2、S3)の前記間隔を決定するステップと、を有する方法。 - 前記光学系(38)は、ステップb)の間に前記参照軸(34)の周りを回転する、請求項1に記載の方法。
- 前記回転の間に前記光学センサ(22)により記録される前記位置(66)の変化から、前記光学系(38)の光軸(40)の、前記参照軸(34)からのずれが推測され、ステップb)での前記調節は、前記光学系(38)の前記光軸(40)が前記参照軸(34)に対して同軸上になるまで継続される、請求項2に記載の方法。
- 前記参照軸(34)の周りの前記回転の間に前記光学センサ(22)により記録される前記位置(66)は、前記参照軸(34)の周りの円軌道(68)を描き、ステップb)での前記調節は、前記円軌道(68’)が最小半径を有するまで継続される、請求項3に記載の方法。
- 前記試験光線及び前記測定光線(50)は、同じ光源(44)により生成される、請求項1乃至4のいずれか一項に記載の方法。
- 多レンズ光学系(38)の光学面(S1、S2、S3)の間隔を測定する装置であって、
a)参照軸(34)に沿って前記表面(S1、S2、S3)の間隔を測定するように構成された干渉計(24)と、
b)前記光学系(38)のすべての光学面(S1、S2、S3)を考慮することにより、前記光学系(38)のセンタリング状態を記録するように構成されたセンタリング状態記録デバイス(44、22;72)と、を有し、
前記センタリング状態記録デバイスは、
前記参照軸(34)に沿って伝わる試験光線(50)を前記光学系(38)の一面に向けるように構成された試験光源(44)と、
前記試験光線(50)が前記光学系(38)を完全に通過した後に前記光学センサ(22)に当たる位置を記録するように構成された位置決定光学センサ(22)と、を有する、装置。 - 前記試験光源(44)は、前記間隔を測定するために前記光学系(38)に向けられる測定光を生成するために前記干渉計(24)内に配置された光源である、請求項6に記載の装置。
- 前記光学系(38)を前記参照軸(34)の周りで回転させるように構成された回転機構(30、32)を有する、請求項6又は7に記載の装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102010053423.4 | 2010-11-29 | ||
| DE102010053423A DE102010053423A1 (de) | 2010-11-29 | 2010-11-29 | Verfahren und Vorrichtung zur Messung von Abständen zwischen optischen Flächen eines optischen Systems |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012118071A true JP2012118071A (ja) | 2012-06-21 |
Family
ID=45047537
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011259391A Pending JP2012118071A (ja) | 2010-11-29 | 2011-11-28 | 光学系の光学面の間隔を測定する方法及び装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8760666B2 (ja) |
| EP (1) | EP2458321B1 (ja) |
| JP (1) | JP2012118071A (ja) |
| DE (1) | DE102010053423A1 (ja) |
| PL (1) | PL2458321T3 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010053422B3 (de) * | 2010-11-29 | 2012-03-29 | Trioptics Gmbh | Messung der Positionen von Krümmungsmittelpunkten optischer Flächen eines mehrlinsigen optischen Systems |
| US8944001B2 (en) | 2013-02-18 | 2015-02-03 | Nordson Corporation | Automated position locator for a height sensor in a dispensing system |
| DE102014208636B4 (de) * | 2014-05-08 | 2018-06-28 | Asphericon Gmbh | Verfahren und Vorrichtung zur Messung einer Dezentrierung und Verkippung von Flächen eines optischen Elements |
| CN105108186A (zh) * | 2015-06-25 | 2015-12-02 | 中国科学院西安光学精密机械研究所 | 透镜基于定心加工的误差分离方法 |
| DE102016014834B3 (de) * | 2016-12-14 | 2018-04-19 | Innolite Gmbh | Verfahren zur ultrapräzisen Zentrierbearbeitung einer transmittiven oder reflektiven Optik, insbesondere einer Linse mit einer asphärischen oder frei geformten vorderen Linsenfläche |
| CN109425312B (zh) * | 2017-09-01 | 2021-12-03 | 宁波舜宇车载光学技术有限公司 | 偏心测试装置及方法 |
| CN108734766B (zh) * | 2018-05-17 | 2022-04-08 | 业成科技(成都)有限公司 | 曲面装置的曲率半径的评估方法 |
| FR3093560B1 (fr) | 2019-03-05 | 2021-10-29 | Fogale Nanotech | Procédé et dispositif de mesure d’interfaces d’un élément optique |
| CN110057552B (zh) * | 2019-04-23 | 2020-11-06 | 芋头科技(杭州)有限公司 | 虚像距离测量方法、装置、设备以及控制器和介质 |
| CN110737103B (zh) * | 2019-10-31 | 2022-03-08 | 中国科学院长春光学精密机械与物理研究所 | 一种大口径离轴折反式多通道光学系统装调方法 |
| CN111220095B (zh) * | 2019-12-06 | 2021-08-03 | 凌云光技术股份有限公司 | 一种用于高精度检测发散光束光轴垂直度的方法及装置 |
| DE102020107298A1 (de) | 2020-03-17 | 2021-09-23 | Berliner Glas GmbH | Verfahren und Justiervorrichtung zur Ausrichtung optischer Linsen |
| CN112526697B (zh) * | 2020-12-10 | 2022-07-22 | 业成科技(成都)有限公司 | 镜片对位方法 |
| US11860380B1 (en) * | 2023-08-15 | 2024-01-02 | Mloptic Corp. | Lens assembly alignment tool |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06194122A (ja) * | 1992-12-24 | 1994-07-15 | Shimadzu Corp | 偏心測定装置 |
| JP2005147703A (ja) * | 2003-11-11 | 2005-06-09 | Olympus Corp | 面間隔測定装置および面間隔測定方法 |
| JP2007046971A (ja) * | 2005-08-09 | 2007-02-22 | Olympus Corp | レンズ偏心測定装置及びレンズ偏心測定方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2803027B1 (fr) | 1999-12-23 | 2003-03-21 | Nanotec Solution | Procede de mesure optique pour la mesure sans contact d'epaisseur de materiaux translucides, et dispositif associe |
| FR2803021B1 (fr) | 1999-12-27 | 2002-05-24 | Soudure Autogene Francaise | Chalumeau oxy-combustible |
| JP2002213926A (ja) * | 2001-01-22 | 2002-07-31 | Nikon Corp | 間隔測定装置、間隔測定方法、及び光学系の製造方法、並びに干渉計 |
| US7046351B2 (en) * | 2002-05-20 | 2006-05-16 | Pentax Corporation | Method and apparatus for measuring eccentricity of optical lens, and method and apparatus for centering and edging optical lens |
| JP2004069594A (ja) * | 2002-08-08 | 2004-03-04 | Olympus Corp | 偏心量測定機及び偏心量測定方法 |
| DE102004029735C5 (de) | 2004-06-21 | 2011-09-15 | Trioptics Gmbh | Verfahren zur Messung optischer Oberflächen innerhalb einer mehrlinsigen Anordnung |
| US7133225B1 (en) | 2004-10-18 | 2006-11-07 | Carl Zeiss Smt Ag | Method of manufacturing an optical system |
| DE102005013571A1 (de) | 2005-03-23 | 2006-06-14 | Carl Zeiss Smt Ag | Verfahren zum Herstellen eines optischen Elements |
| JP2008542801A (ja) | 2005-05-24 | 2008-11-27 | カール・ツァイス・エスエムティー・アーゲー | 光学系の製造方法 |
| JP4880513B2 (ja) * | 2007-03-29 | 2012-02-22 | 富士フイルム株式会社 | 非球面レンズの面ずれ測定方法および装置 |
| CN101334334B (zh) * | 2007-06-25 | 2010-06-02 | 佛山普立华科技有限公司 | 镜片偏心检测系统 |
| CN101373167B (zh) * | 2007-08-24 | 2010-04-07 | 鸿富锦精密工业(深圳)有限公司 | 镜片偏心检测系统及方法 |
-
2010
- 2010-11-29 DE DE102010053423A patent/DE102010053423A1/de not_active Withdrawn
-
2011
- 2011-11-19 EP EP11009186.5A patent/EP2458321B1/de active Active
- 2011-11-19 PL PL11009186T patent/PL2458321T3/pl unknown
- 2011-11-22 US US13/302,675 patent/US8760666B2/en active Active
- 2011-11-28 JP JP2011259391A patent/JP2012118071A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06194122A (ja) * | 1992-12-24 | 1994-07-15 | Shimadzu Corp | 偏心測定装置 |
| JP2005147703A (ja) * | 2003-11-11 | 2005-06-09 | Olympus Corp | 面間隔測定装置および面間隔測定方法 |
| JP2007046971A (ja) * | 2005-08-09 | 2007-02-22 | Olympus Corp | レンズ偏心測定装置及びレンズ偏心測定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102010053423A1 (de) | 2012-05-31 |
| PL2458321T3 (pl) | 2014-08-29 |
| US20120133951A1 (en) | 2012-05-31 |
| EP2458321B1 (de) | 2014-01-08 |
| EP2458321A1 (de) | 2012-05-30 |
| US8760666B2 (en) | 2014-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012118071A (ja) | 光学系の光学面の間隔を測定する方法及び装置 | |
| JP5902448B2 (ja) | 多レンズ光学系の光学面の曲率中心の位置の測定 | |
| EP2369319B1 (en) | Aspheric object measuring method and apparatus | |
| JP2005509875A (ja) | 非球面表面および波面の走査干渉計 | |
| JP2004530898A (ja) | 非球面表面および波面に対する干渉計スキャニング | |
| CN109406105B (zh) | 虚像检测方法及检测系统 | |
| CN112325802A (zh) | 基于共路差分和自校零的二维小角度激光测量方法与装置 | |
| WO2012132930A1 (ja) | レンズ測定装置 | |
| JP2010025876A (ja) | 微小距離測定方法および微小距離測定装置 | |
| JPH1089935A (ja) | 非球面干渉計測装置 | |
| JP2960905B2 (ja) | 洩れ内部全反射に基づいて磁気ヘッドの透明媒体に対する浮動高さ及び方位を測定する装置 | |
| TWI595252B (zh) | 測距裝置及其測距方法 | |
| JP3230983B2 (ja) | 光波干渉装置の被検体位置調整方法 | |
| JP2002206915A (ja) | 面形状測定装置の横座標較正方法および面形状測定装置 | |
| JP2002048673A (ja) | 光学素子又は光学系の物理量測定方法 | |
| JP2865337B2 (ja) | 光学測定装置 | |
| JP3702733B2 (ja) | 光学検査装置のアライメント方法およびその機構 | |
| CN109341587A (zh) | 拼接测量装置和方法 | |
| JP2000230883A (ja) | 偏芯測定装置及びその調整方法 | |
| CN108663124B (zh) | 波前传感器的检测装置和方法 | |
| JPH1194700A (ja) | レンズの測定装置及び測定方法 | |
| CN220304798U (zh) | 一种五棱镜直角误差检测辅助装置 | |
| CN201532193U (zh) | 一种检测反射镜入射角的装置 | |
| JP3164444B2 (ja) | 干渉測定方法 | |
| JP2814255B2 (ja) | 屈折率分布の測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140925 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150804 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20151102 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151127 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160426 |