JP2010143398A - 駆動システム - Google Patents
駆動システム Download PDFInfo
- Publication number
- JP2010143398A JP2010143398A JP2008322637A JP2008322637A JP2010143398A JP 2010143398 A JP2010143398 A JP 2010143398A JP 2008322637 A JP2008322637 A JP 2008322637A JP 2008322637 A JP2008322637 A JP 2008322637A JP 2010143398 A JP2010143398 A JP 2010143398A
- Authority
- JP
- Japan
- Prior art keywords
- engine
- torque
- motor
- transmission
- generator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Structure Of Transmissions (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Abstract
【解決手段】この駆動システム1は、モータ・ジェネレータ3が制振トルクを発生してダンパ機構5におけるトルク変動を減衰させる構成を有する。このとき、エンジン2の回転数Neと、モータ・ジェネレータ3の回転数に基づいて算出されたトランスミッション4の入力軸41の回転数Ntと、エンジン2の回転数Neおよびアクセル開度に基づいて算出された閾値aとが|Ne−Nt|>aの関係を有するときに、モータ・ジェネレータ3が制振トルクを発生する。
【選択図】 図1
Description
この駆動システム1は、例えば、車両10のハイブリッドシステムに適用される(図1参照)。駆動システム1は、動力源としてのエンジン2および複数のモータ・ジェネレータ3、3と、伝達系としてのトランスミッション4およびダンパ機構5と、制御系6とを有する。エンジン2は、例えば、ガソリンエンジンやディーゼルエンジンなどのレシプロタイプの内燃機関である。モータ・ジェネレータ3は、例えば、永久磁石型同期電動機などの発電機能を有する電動機である。モータ・ジェネレータ3は、トランスミッション4の入力軸(インプットシャフト)41側に連結される。なお、この実施例では、複数のモータ・ジェネレータ3が車両10の前輪および後輪に対してそれぞれ割り当てられている。
一般に、車両走行時には、エンジンの出力トルクが周期的に変動する。このため、このトルク変動に起因して、エンジン回転数(エンジン2の出力軸21の回転数)Neとトランスミッション4のインプット回転数(入力軸41の回転数)と間に差が生じる。かかる回転数差は、車両の振動発生の原因になる。
以上説明したように、この駆動システム1では、エンジン2の出力軸21とトランスミッション4の入力軸41との回転数差|Ne−Nt|が所定の閾値aよりも大きいときに、モータ・ジェネレータ3が制振トルクを発生して制振制御が行われる(図2参照)。かかる構成では、例えば、路面入力などに起因する過大トルク(エンジン2の周期的なトルク変動よりも大きなトルク)が作用したときに、この過大トルクに対して適切な制振制御が行われる。これにより、トランスミッション4への過負荷が効果的に抑制されるので、トルク振動が効果的に抑制される利点がある。また、このとき、エンジン2の回転数Neとアクセル開度との相関性を考慮して算出された閾値aが用いられるので、必要な場面でのみ制振制御が行われる。これにより、制振制御の実行によるモータ・ジェネレータ3の損失が低減されるので、燃費が向上する利点がある。例えば、車両走行時にて常にモータ・ジェネレータを駆動して逆位相の制振トルクを発生させるとすると、モータ・ジェネレータの負荷が増加して損失が発生する問題がある。したがって、トランスミッションの破損につながるような大きなトルク負荷が生じたときのみ、モータ・ジェネレータを駆動して制振トルクを発生させることにより、効率的な運転が可能となる。
また、この駆動システム1では、|Ne−Nt|>aかつ加速運転時にて、エンジン2の出力トルクが引き下げられることが好ましい。外部から過大トルクが入力されると、トランスミッション4には、この過大トルクとエンジントルクとの双方が作用する。したがって、|Ne−Nt|>aかつ加速運転時にてエンジンが出力トルクを引き下げることにより、トランスミッションに作用する負荷トルクが軽減される。これにより、車両の振動が効果的に抑制される利点がある。なお、過大トルクが発生するような運転条件下(|Ne−Nt|>a)では、波状路や石畳路などの特殊環境での走行状態であることが多い。したがって、かかる運転条件下にてエンジンの出力トルクを引き下げたとしても、ドライバーの違和感は少ない。なお、加速運転時か否かの判定は、アクセル開度センサの出力値などに基づいてECU61により行われる。
2 エンジン
21 出力軸
3 モータ・ジェネレータ
4 トランスミッション
41 入力軸
42 出力軸
5 ダンパ機構
6 制御系
7 ディファレンシャル
8 クラッチ機構
10 車両
11 車輪
Claims (5)
- エンジンおよびモータ・ジェネレータと、前記エンジンおよび前記モータ・ジェネレータに連結されるトランスミッションと、前記エンジンの出力軸および前記トランスミッションの入力軸の間に配置されて軸間のトルク変動を減衰するダンパ機構とを備えると共に、前記モータ・ジェネレータが制振トルクを発生して前記ダンパ機構におけるトルク変動を減衰させる駆動システムであって、
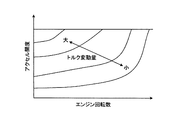
前記エンジンの回転数Neと、前記モータ・ジェネレータの回転数に基づいて算出された前記トランスミッションの入力軸の回転数Ntと、前記エンジンの回転数Neおよびアクセル開度に基づいて算出された閾値aとが|Ne−Nt|>aの関係を有するときに、前記モータ・ジェネレータが前記制振トルクを発生することを特徴とする駆動システム。 - 前記閾値aは、エンジン回転数Neが大きく且つアクセル開度が小さい領域にて小さく設定され、エンジン回転数Neが小さく且つアクセル開度が大きい領域にて大きく設定される請求項1に記載の駆動システム。
- |Ne−Nt|>aかつ加速運転時にて、前記エンジンの出力トルクが引き下げられる請求項2に記載の駆動システム。
- 前記エンジンの出力トルクの引き下げ量が回転数差|Ne−Nt|およびアクセル開度に比例して設定される請求項3に記載の駆動システム。
- 前記エンジンの出力トルクの引き下げ時にて、前記エンジンの回転数Neが増加されると共に前記トランスミッションの変速比が前記エンジンの実駆動力を一定とする設定に変更される請求項3または4に記載の駆動システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008322637A JP5309959B2 (ja) | 2008-12-18 | 2008-12-18 | 駆動システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008322637A JP5309959B2 (ja) | 2008-12-18 | 2008-12-18 | 駆動システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010143398A true JP2010143398A (ja) | 2010-07-01 |
| JP5309959B2 JP5309959B2 (ja) | 2013-10-09 |
Family
ID=42564276
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008322637A Expired - Fee Related JP5309959B2 (ja) | 2008-12-18 | 2008-12-18 | 駆動システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5309959B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012097709A (ja) * | 2010-11-05 | 2012-05-24 | Toyota Motor Corp | 車両の制御装置 |
| JP2013035314A (ja) * | 2011-08-03 | 2013-02-21 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| US8868277B2 (en) | 2010-11-04 | 2014-10-21 | Toyota Jidosha Kabushiki Kaisha | Vehicular hybrid drive system |
| WO2021164812A1 (de) * | 2020-02-20 | 2021-08-26 | Schaeffler Technologies AG & Co. KG | Verfahren zur steuerung eines hybridantriebsstrangs |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6236934U (ja) * | 1985-08-23 | 1987-03-04 | ||
| JPH1189008A (ja) * | 1997-09-12 | 1999-03-30 | Honda Motor Co Ltd | エンジンの振動抑制装置 |
| JP2000032607A (ja) * | 1998-07-09 | 2000-01-28 | Toyota Motor Corp | ハイブリッド車両における駆動系の制振装置 |
| JP2001136605A (ja) * | 1999-11-01 | 2001-05-18 | Toyota Motor Corp | 駆動装置の制振装置 |
| JP2002262408A (ja) * | 2001-02-28 | 2002-09-13 | Jatco Ltd | パラレルハイブリッド車両 |
| JP2007261415A (ja) * | 2006-03-28 | 2007-10-11 | Mitsubishi Fuso Truck & Bus Corp | ハイブリッド自動車の制御装置 |
| JP2008195207A (ja) * | 2007-02-13 | 2008-08-28 | Toyota Motor Corp | ハイブリッド車両の駆動装置 |
-
2008
- 2008-12-18 JP JP2008322637A patent/JP5309959B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6236934U (ja) * | 1985-08-23 | 1987-03-04 | ||
| JPH1189008A (ja) * | 1997-09-12 | 1999-03-30 | Honda Motor Co Ltd | エンジンの振動抑制装置 |
| JP2000032607A (ja) * | 1998-07-09 | 2000-01-28 | Toyota Motor Corp | ハイブリッド車両における駆動系の制振装置 |
| JP2001136605A (ja) * | 1999-11-01 | 2001-05-18 | Toyota Motor Corp | 駆動装置の制振装置 |
| JP2002262408A (ja) * | 2001-02-28 | 2002-09-13 | Jatco Ltd | パラレルハイブリッド車両 |
| JP2007261415A (ja) * | 2006-03-28 | 2007-10-11 | Mitsubishi Fuso Truck & Bus Corp | ハイブリッド自動車の制御装置 |
| JP2008195207A (ja) * | 2007-02-13 | 2008-08-28 | Toyota Motor Corp | ハイブリッド車両の駆動装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8868277B2 (en) | 2010-11-04 | 2014-10-21 | Toyota Jidosha Kabushiki Kaisha | Vehicular hybrid drive system |
| JP2012097709A (ja) * | 2010-11-05 | 2012-05-24 | Toyota Motor Corp | 車両の制御装置 |
| JP2013035314A (ja) * | 2011-08-03 | 2013-02-21 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| WO2021164812A1 (de) * | 2020-02-20 | 2021-08-26 | Schaeffler Technologies AG & Co. KG | Verfahren zur steuerung eines hybridantriebsstrangs |
| CN114901532A (zh) * | 2020-02-20 | 2022-08-12 | 舍弗勒技术股份两合公司 | 用于控制混合动力传动系的方法 |
| US11958472B2 (en) | 2020-02-20 | 2024-04-16 | Schaeffler Technologies AG & Co. KG | Method for controlling a hybrid drive train |
| CN114901532B (zh) * | 2020-02-20 | 2026-01-02 | 舍弗勒技术股份两合公司 | 用于控制混合动力传动系的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5309959B2 (ja) | 2013-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4805624B2 (ja) | ハイブリッド自動車のパワートレインにおける主動力源の振動を減衰する方法 | |
| KR101628545B1 (ko) | 하이브리드 차량의 회생제동 제어방법 | |
| JP2011098709A (ja) | ハイブリッド車両のアンチジャーク制御装置及び方法 | |
| CN105189169A (zh) | 车辆用驱动装置 | |
| JP7540659B2 (ja) | 車両制御装置 | |
| JP2008024287A (ja) | ハイブリッド電気自動車の制御装置 | |
| WO2011155024A1 (ja) | 車両用制御装置および車両用制御方法 | |
| US20230400094A1 (en) | Control device and control method of electric vehicle | |
| JP7006532B2 (ja) | トルク制御装置 | |
| WO2010143030A1 (en) | Control apparatus and control method for vehicle | |
| JP5309959B2 (ja) | 駆動システム | |
| JP2010274875A (ja) | ハイブリッド車両の振動制御装置 | |
| JP4569266B2 (ja) | 車両のモータトラクション制御装置 | |
| JP4710299B2 (ja) | 車両のモータトラクション制御装置 | |
| CN112368172B (zh) | 控制装置 | |
| WO2015019399A1 (ja) | 車両の制振制御装置 | |
| JP5867109B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2007315220A (ja) | 車両用動力装置およびその制御装置 | |
| JP3374752B2 (ja) | ハイブリッド車両における駆動系の制振装置 | |
| JP6870622B2 (ja) | 電動車両の制御装置 | |
| JP5850609B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4816243B2 (ja) | 車両用動力装置およびその制御装置 | |
| JP2007112248A (ja) | 駆動系の制振制御装置 | |
| JP4604687B2 (ja) | 車両の制御装置 | |
| CN114103660A (zh) | 一种电动车低速扭矩波动的控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110629 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121009 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121204 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130507 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130514 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130604 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130617 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5309959 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |