JP2010069717A - インクジェット記録装置 - Google Patents
インクジェット記録装置 Download PDFInfo
- Publication number
- JP2010069717A JP2010069717A JP2008239508A JP2008239508A JP2010069717A JP 2010069717 A JP2010069717 A JP 2010069717A JP 2008239508 A JP2008239508 A JP 2008239508A JP 2008239508 A JP2008239508 A JP 2008239508A JP 2010069717 A JP2010069717 A JP 2010069717A
- Authority
- JP
- Japan
- Prior art keywords
- blade
- cleaner
- ink
- recording head
- blade support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000006096 absorbing agent Substances 0.000 claims description 188
- 230000007246 mechanism Effects 0.000 claims description 86
- 238000004140 cleaning Methods 0.000 claims description 56
- 239000011148 porous material Substances 0.000 claims description 32
- 238000003825 pressing Methods 0.000 claims description 8
- 238000007599 discharging Methods 0.000 claims 2
- 238000011144 upstream manufacturing Methods 0.000 claims 1
- 230000015572 biosynthetic process Effects 0.000 abstract description 2
- 230000002093 peripheral effect Effects 0.000 abstract 1
- 238000010186 staining Methods 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 85
- 230000004048 modification Effects 0.000 description 30
- 238000012986 modification Methods 0.000 description 30
- 238000000034 method Methods 0.000 description 21
- 230000008569 process Effects 0.000 description 21
- 238000010521 absorption reaction Methods 0.000 description 9
- 230000009471 action Effects 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 230000008859 change Effects 0.000 description 4
- 239000000428 dust Substances 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 238000010926 purge Methods 0.000 description 4
- 239000000470 constituent Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000001965 increasing effect Effects 0.000 description 3
- 229920006395 saturated elastomer Polymers 0.000 description 3
- 229920001971 elastomer Polymers 0.000 description 2
- 239000005038 ethylene vinyl acetate Substances 0.000 description 2
- 229920001200 poly(ethylene-vinyl acetate) Polymers 0.000 description 2
- 229920002943 EPDM rubber Polymers 0.000 description 1
- 244000043261 Hevea brasiliensis Species 0.000 description 1
- 229920000459 Nitrile rubber Polymers 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 229920005549 butyl rubber Polymers 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- HQQADJVZYDDRJT-UHFFFAOYSA-N ethene;prop-1-ene Chemical group C=C.CC=C HQQADJVZYDDRJT-UHFFFAOYSA-N 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- ZHPNWZCWUUJAJC-UHFFFAOYSA-N fluorosilicon Chemical compound [Si]F ZHPNWZCWUUJAJC-UHFFFAOYSA-N 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000008531 maintenance mechanism Effects 0.000 description 1
- 229920003052 natural elastomer Polymers 0.000 description 1
- 229920001194 natural rubber Polymers 0.000 description 1
- 229920001084 poly(chloroprene) Polymers 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229920002379 silicone rubber Polymers 0.000 description 1
- 238000005549 size reduction Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000007723 transport mechanism Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images
































Abstract
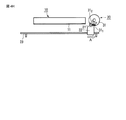
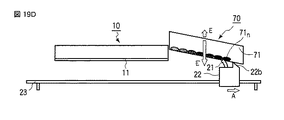
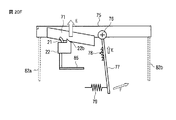
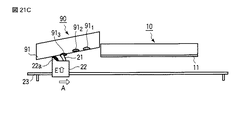
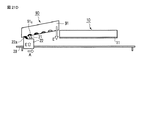
【解決手段】インクジェット記録装置1に於いて、記録ヘッド10のノズルプレート11に付着したインクはブレード部21で払拭される。ブレード部21はブレード支持体22に支持され、記録ヘッド10の長手方向に沿った所定の範囲内に於いて、ブレード支持体駆動用モータの駆動により移動される。ブレード部21に付着したインクは、ブレード部21と当接可能に設置されたクリーナ30と当接することで、前記ブレード部21から吸い取られる。そして、制御部がブレード支持体駆動用モータを制御して、前記クリーナ30に於ける前記ブレード部21の当接する部位が、ブレード部21とクリーナ30が当接する毎に変更される。
【選択図】 図1
Description
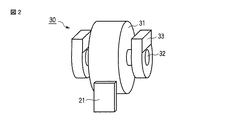
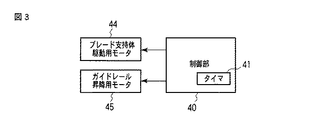
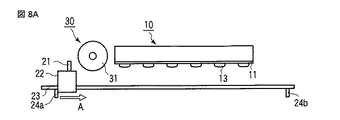
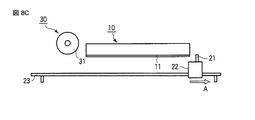
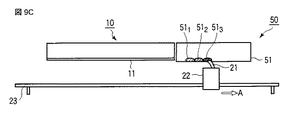
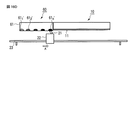
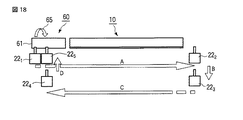
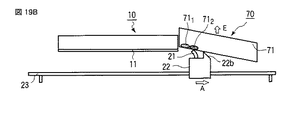
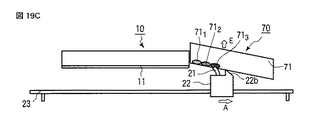
図1は本発明の第1の実施形態に係るインクジェット記録装置1に於ける記録ヘッド10及びワイピング機構20、クリーナ30の概略構成を側面から観た模式図、図2は図1のクリーナ30の斜視図、図3は本インクジェット記録装置に於いてワイパブレードのクリーニングに関する制御系のみ示したブロック構成図である。
ポリウレタン
ポリエチレン
クロロプレンゴム
天然ゴム
エチレン・プロピレン(EPDM)ゴム
ニトリルゴム
ブチルゴム
フッ素系
シリコンゴム
EVAゴム(エチレン酢酸ビ二ル共重合体)
また、気孔径は、500μm以下、好ましくは50μm程度である。
次に、本発明の第1の実施形態に於ける変形例について説明する。
次に、本発明の第2の実施形態について説明する。
次に、本発明の第2の実施形態の変形例について説明する。
次に、本発明の第3の実施形態について説明する。
次に、本発明の第3の実施形態の変形例について説明する。
次に、本発明の第4の実施形態について説明する。
次に、本発明の第5の実施形態について説明する。
Claims (14)
- 記録ヘッドのノズルプレートに設けられたノズルから、記録媒体に向けてインクを吐出して画像を記録するインクジェット記録装置に於いて、
前記記録ヘッドのノズルプレートに付着したインクを払拭するブレードと、
前記記録ヘッドの長手方向に沿った所定の範囲内に於いて、前記プレードを移動させる第1駆動手段と、
前記ブレードと当接可能に設置され、前記ブレードと当接することで該ブレードに付着したインクを吸い取るクリーナと、
前記第1駆動手段を制御し、前記クリーナに於ける前記ブレードの当接する部位を、前記ブレードが前記クリーナに当接する毎に変更するクリーニング位置変更手段と、
を具備することを特徴とするインクジェット記録装置。 - 前記クリーナは、前記ブレードの移動方向に対して直交する軸まわりに回動可能に軸支され、
前記クリーニング位置変更手段は、前記ブレードを移動させて前記クリーナに対して押圧し、その押圧力でもって前記クリーナを回動させることを特徴とする請求項1に記載のインクジェット記録装置。 - 前記クリーナは、前記ブレードが前記記録ヘッドのノズルプレートを払拭する方向に於いて、前記記録ヘッドよりも下流側に設置されることを特徴とする請求項2に記載のインクジェット記録装置。
- 前記クリーニング位置変更手段は、前記第1駆動手段を制御し、前記クリーナに対する前記ブレードの当接及び停止位置をクリーニング毎にずらすことを特徴とする請求項1に記載のインクジェット記録装置。
- 前記クリーナは、前記ブレードが前記記録ヘッドのノズルプレートを払拭する方向に於いて、前記記録ヘッドよりも下流側に設置されることを特徴とする請求項4に記載のインクジェット記録装置。
- 前記クリーニング位置変更手段は、前記クリーナに対する前記ブレードの停止位置をクリーニング毎に前記記録ヘッドから遠ざけることを特徴とする請求項5に記載のインクジェット記録装置。
- 前記クリーナに当接可能で、前記クリーナに当接することで該クリーナ内に吸収されたインクを絞り出し、該クリーナ外に放出するインク放出部材を更に有し、
前記第1駆動手段は、前記インク放出部材を前記ブレードと共に移動させることを特徴とする請求項5に記載のインクジェット記録装置。 - 前記クリーナは、前記ブレードとの当接面を、前記記録ヘッドに近い側を高く、遠い側を低くなるように傾斜させると共に、前記ノズルプレートに対して垂直方向に沿って段階的に移動可能となるラッチ機構を具備し、
前記クリーニング位置変更手段は、前記第1駆動手段を制御し、前記ブレードを前記クリーナに押し当てることで、前記クリーナを押し上げ、ラッチさせることを特徴とする請求項6に記載のインクジェット記録装置。 - 前記クリーナは、前記ブレードが前記記録ヘッドのノズルプレートを払拭する方向に於いて、前記記録ヘッドよりも上流側に設置されることを特徴とする請求項4に記載のインクジェット記録装置。
- 前記記録ヘッドのノズルプレートに対して垂直方向に沿った所定の範囲内に於いて、前記ブレードを移動させる第2駆動手段を更に具備し、
前記クリーニング位置変更手段は、前記第2駆動手段を制御し、前記ブレードを前記クリーナに当接させることで、前記ブレードの停止位置を規定することを特徴とする請求項9に記載のインクジェット記録装置。 - 前記クリーニング位置変更手段は、前記第1駆動手段を制御し、前記クリーナに対する前記ブレードの停止位置をクリーニング毎に前記記録ヘッドから遠ざけることを特徴とする請求項10に記載のインクジェット記録装置。
- 前記クリーニング位置変更手段は、前記第1駆動手段を制御し、前記クリーナに対する前記ブレードの停止位置をクリーニング毎に前記記録ヘッド側に近づけることを特徴とする請求項10に記載のインクジェット記録装置。
- 前記クリーナは、前記ブレードとの当接面を、前記記録ヘッドに近い側を高く、遠い側を低くなるように傾斜させると共に、前記ノズルプレートに対して垂直方向に沿って段階的に移動可能となるラッチ機構を具備し、
前記クリーニング位置変更手段は、前記第2駆動手段による押し上げ力を利用して、前記クリーナを押し上げ、ラッチさせることを特徴とする請求項11に記載のインクジェット記録装置。 - 前記ブレード及びインク吸収体は、それぞれ多孔質材料によって構成され、
前記インク吸収体の多孔質材料の平均気孔径は、前記ブレードのそれよりも小さいことを特徴とする請求項1に記載のインクジェット記録装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008239508A JP5238423B2 (ja) | 2008-09-18 | 2008-09-18 | インクジェット記録装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008239508A JP5238423B2 (ja) | 2008-09-18 | 2008-09-18 | インクジェット記録装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010069717A true JP2010069717A (ja) | 2010-04-02 |
| JP5238423B2 JP5238423B2 (ja) | 2013-07-17 |
Family
ID=42201961
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008239508A Active JP5238423B2 (ja) | 2008-09-18 | 2008-09-18 | インクジェット記録装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5238423B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013154591A (ja) * | 2012-01-31 | 2013-08-15 | Ricoh Co Ltd | 画像形成装置 |
| CN103707645A (zh) * | 2013-12-11 | 2014-04-09 | 浙江工业大学 | 邮资机的喷墨打印头清刮装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04247958A (ja) * | 1991-01-19 | 1992-09-03 | Canon Inc | インクジェット記録装置および該装置に用いられる記録ヘッドのクリーニング方法 |
| JPH06218940A (ja) * | 1993-01-25 | 1994-08-09 | Fuji Xerox Co Ltd | インクジェット記録装置 |
| JPH09220811A (ja) * | 1996-02-20 | 1997-08-26 | Brother Ind Ltd | インクジェット記録装置のワイパー装置 |
| JPH09277568A (ja) * | 1996-04-19 | 1997-10-28 | Brother Ind Ltd | インクジェット記録装置のインク回収装置 |
| JP2003165232A (ja) * | 2001-12-03 | 2003-06-10 | Konica Corp | インクジェット記録装置 |
| JP2006137202A (ja) * | 2003-09-10 | 2006-06-01 | Fuji Photo Film Co Ltd | インクジェット記録装置及びインク吐出面清掃方法並びに清掃装置 |
| JP2008155623A (ja) * | 2006-11-27 | 2008-07-10 | Ricoh Co Ltd | 液体吐出装置及び画像形成装置 |
-
2008
- 2008-09-18 JP JP2008239508A patent/JP5238423B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04247958A (ja) * | 1991-01-19 | 1992-09-03 | Canon Inc | インクジェット記録装置および該装置に用いられる記録ヘッドのクリーニング方法 |
| JPH06218940A (ja) * | 1993-01-25 | 1994-08-09 | Fuji Xerox Co Ltd | インクジェット記録装置 |
| JPH09220811A (ja) * | 1996-02-20 | 1997-08-26 | Brother Ind Ltd | インクジェット記録装置のワイパー装置 |
| JPH09277568A (ja) * | 1996-04-19 | 1997-10-28 | Brother Ind Ltd | インクジェット記録装置のインク回収装置 |
| JP2003165232A (ja) * | 2001-12-03 | 2003-06-10 | Konica Corp | インクジェット記録装置 |
| JP2006137202A (ja) * | 2003-09-10 | 2006-06-01 | Fuji Photo Film Co Ltd | インクジェット記録装置及びインク吐出面清掃方法並びに清掃装置 |
| JP2008155623A (ja) * | 2006-11-27 | 2008-07-10 | Ricoh Co Ltd | 液体吐出装置及び画像形成装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013154591A (ja) * | 2012-01-31 | 2013-08-15 | Ricoh Co Ltd | 画像形成装置 |
| CN103707645A (zh) * | 2013-12-11 | 2014-04-09 | 浙江工业大学 | 邮资机的喷墨打印头清刮装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5238423B2 (ja) | 2013-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6916080B2 (en) | Cleaning device for cleaning printhead of ink-jet printer | |
| JP4975667B2 (ja) | インクジェット記録装置 | |
| EP1782956B1 (en) | Ink-jet recording apparatus | |
| US6390595B1 (en) | Ink jet recording device having a recovery function for restoring a printing function of an ink head during a standby mode thereof | |
| JP2007050592A (ja) | 液体吐出ヘッドのクリーニング装置 | |
| US6886907B1 (en) | Cleaning device for cleaning printhead of ink-jet printer | |
| JP4888061B2 (ja) | インクジェット記録装置 | |
| JP2020192789A (ja) | インクジェット記録装置 | |
| JP2007130809A (ja) | インクジェット記録装置 | |
| JP5238423B2 (ja) | インクジェット記録装置 | |
| JP6299330B2 (ja) | 液体吐出装置 | |
| US6679579B1 (en) | Wiping mechanism | |
| JP4806955B2 (ja) | インクジェットプリンタ | |
| JP2016210051A (ja) | インクヘッドのクリーニング機構 | |
| JP2007130806A (ja) | インクジェット記録装置 | |
| JPH0542677A (ja) | インクジエツト印刷装置におけるヘツドクリーニング装置 | |
| JP2005212165A (ja) | インクジェット記録装置 | |
| JPH04357044A (ja) | インクジェット記録装置 | |
| JPH05238015A (ja) | インクジェット記録装置 | |
| JP2020104363A (ja) | 液体吐出ヘッドのワイピングユニットおよびインクジェットプリンタ | |
| JPH0924617A (ja) | インクジェット記録装置 | |
| JP2008093945A (ja) | 液体吐出装置および液体吐出装置の清掃方法 | |
| JP4586807B2 (ja) | インクジェット式記録装置 | |
| JPH1178034A (ja) | インク吸い取り機構付きインクジェットプリンター | |
| JP6432263B2 (ja) | 液体吐出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20110225 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20110616 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110805 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20111201 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120905 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120911 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121102 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130207 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130401 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5238423 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160405 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |