JP2010038727A - ナビゲーション装置、方法及びプログラム - Google Patents
ナビゲーション装置、方法及びプログラム Download PDFInfo
- Publication number
- JP2010038727A JP2010038727A JP2008201936A JP2008201936A JP2010038727A JP 2010038727 A JP2010038727 A JP 2010038727A JP 2008201936 A JP2008201936 A JP 2008201936A JP 2008201936 A JP2008201936 A JP 2008201936A JP 2010038727 A JP2010038727 A JP 2010038727A
- Authority
- JP
- Japan
- Prior art keywords
- boundary line
- moving body
- information
- outer product
- start point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 19
- 239000013598 vector Substances 0.000 claims abstract description 90
- 238000001514 detection method Methods 0.000 claims abstract description 73
- 238000004891 communication Methods 0.000 claims abstract description 9
- 230000008859 change Effects 0.000 claims description 7
- 238000010586 diagram Methods 0.000 description 10
- 238000007792 addition Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 240000001973 Ficus microcarpa Species 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images









Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
【解決手段】地図データを記憶する地図情報記憶部1と、境界線を記憶する境界線記憶部2を備える。GPSや車速センサなどのデータを取得する位置情報取得部4の情報に基づいて、移動体位置検出部4が移動体の現在位置を検出する。移動体の位置情報Mと、境界線上に設けた始点Pと終点Qから境界線ベクトルAと移動体位置ベクトルBを得る。これらベクトルA,Bの外積を外積演算部5で計算する。境界線通過検出部6は、2つのベクトルA,Bの外積の符号の変化により、移動体が境界線を越えたかどうかを検出する。境界線通過の検出結果は、報知制御部7が制御する通信機器9により移動体外部に、報知部10により移動体Mに報知する。報知情報記憶部8に記憶した、通過した境界線に関する報知情報も、報知する。
【選択図】図1
Description
本実施形態のナビゲーション装置の構成を、図1のブロック図に示す。本実施形態のナビゲーション装置は移動体に搭載されるものであり、本実施形態では移動体として、路線バスを選定する。このナビゲーション装置は、ナビゲーションに必要な地図データを記憶する地図情報記憶部1と、この地図情報記憶部1内に設けられ、境界線を記憶する境界線記憶部2とを備える。この境界線記憶部2は、必ずしも地図情報記憶部1内に設ける必要はないが、境界線は、ナビゲーション用の地図データに含まれる施設の位置情報などと同様に、境界線ベクトルの始点と終点の座標によって定義される(始点と終点を結ぶ直線とその延長上にある直線を境界線と呼ぶ)ものであるから、地図情報記憶部1内に設けることが簡便である。
次に、本実施形態の動作を、図3のフローチャート及び図4以下の説明図によって、具体的に説明する。
以上のような構成並びに作用を有する本実施形態の効果は次の通りである。
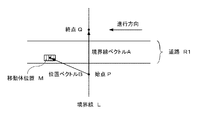
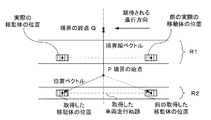
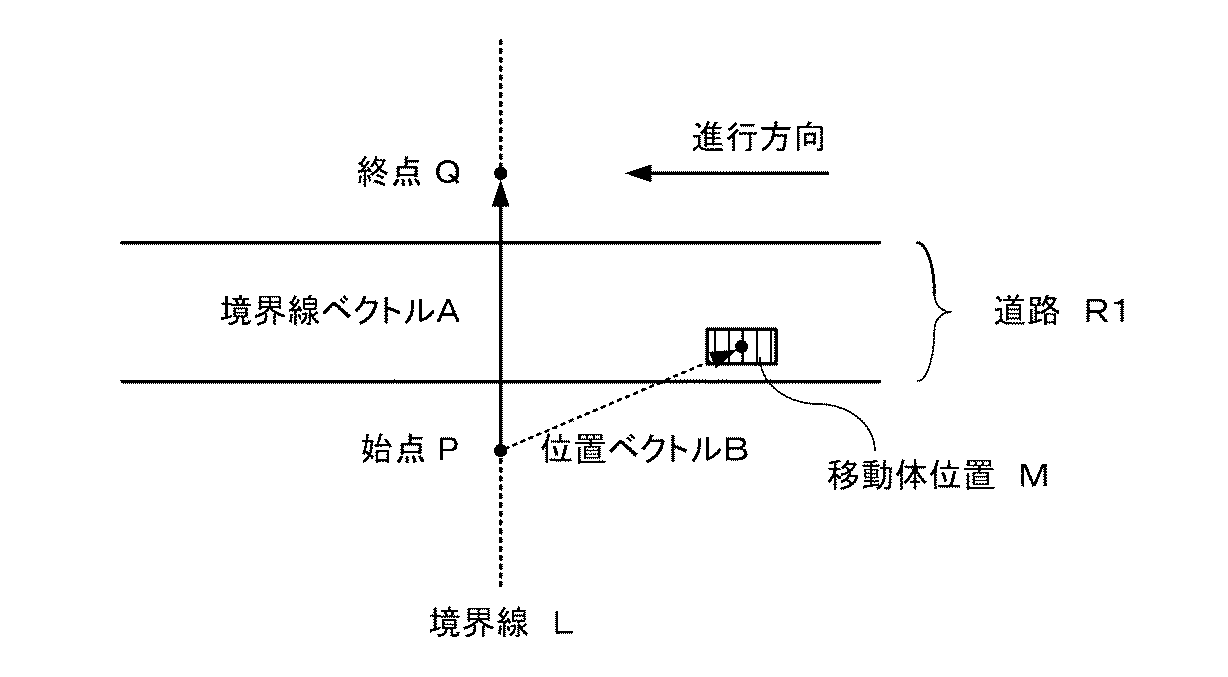
図4は、本実施形態における移動体と境界線の関係を示す模式図である。図4に示すように、移動体Mが通過する道路Rに対する期待される進行方向の左側に境界線Lの始点Pを設置し、右側に境界線Lの終点Qを設置するよう規定する。この始点Pと終点Qはある程度離れた位置に存在するが、外積の計算上この2点を通る全てが境界線Lとみなされるため、2点間の線分上以外の部分を通過した場合でも、同様に通過検出を行うことができる。これにより、GPSの情報が取れない場合や、マップマッチングの精度が悪く、実際の位置とは異なる位置に移動体位置があると計算される場合でも、境界線の通過を検出し、検出ミスを防ぐことができる。
図8及び図9は、移動体がロータリーR3などでUターンすることにより、同じルートを往復する場合について、それぞれのルートと境界線ベクトルの関係を示した図である。図8は、往路のルートと往路用の境界線ベクトルA1と復路用の境界線ベクトルA2の関係を示した図である。境界線ベクトルA1は往路の走行軌跡に対して、左側に存在する座標を始点座標P、右側に存在する座標を終点座標Qとする。また、境界線ベクトルA2は、復路の走行軌跡に対して左側に存在する座標を始点座標P、右側に存在する座標を終点座標Qとすると、境界線ベクトルA1とA2の向きが逆になる。
本実施形態によれば、境界線のどちら側にいるかを外積によって求めることにより、検出エリアが円や多角形に比べて少ない計算量で通過検出が可能である。検出エリアが円の場合、移動体位置座標を(Ax、Ay)、境界線の始点を(Bx、By)、境界線の終点を(Cx、Cy)、検出エリアの中心座標を(Dx、Dy)、検出エリアの半径をR、緯度経度1秒あたりの距離をそれぞれ、Mx、My[m]とする。各座標は全て秒単位で表されるとする。従来の2点間の距離を用いた場合、(2)のような式で表される。
本発明は前記の実施形態に限定されるものではなく、路線バスの案内以外にも、セールスや商品配送のルートなどの、移動体が順番に複数の場所や施設を巡回するような場合のように、複数の境界線が移動体の進行方向に沿って設けられている場合に有効である。また、移動体としては、バスなどの車両以外に、携帯電話に組み込んだナビゲーション装置のように、移動する人間を対象とすることもできる。更に、境界線が1つの場合も包含するものであり、例えば、チェーン規制のような交通規制を行う場合に、交通情報と共に境界線の情報を移動体に配信して、配信された境界線を通過判定用の境界線として選択することも可能である。
2…境界線記憶部
3…位置情報取得部
4…移動体位置検出部
5…外積演算部
6…境界線通過検出部
7…報知制御部
8…報知情報記憶部
9…通信機器
10…報知装置
11…センタのサーバ
12…情報掲示板
13…移動端末
14…境界線選択部
Claims (10)
- 移動体位置を検出する移動体位置検出手段と、
移動体の進行方向と交差する境界線上に設けられた始点と終点を記憶する記憶手段と、
境界線上にある始点と終点とを結ぶ境界線ベクトルと、始点から移動体位置を結ぶ移動体位置ベクトルとの外積を計算する外積計算手段と、
前記外積計算手段によって、計算して得た外積の符号の変化に基づいて、前記移動体が前記境界線を横切ったか否かを検出する境界線通過検出手段を有することを特徴とするナビゲーション装置。 - 前記記憶手段は、移動体の進行方向に対して左側に存在する座標を始点座標、右側に存在する座標を終点座標として、前記境界線を、前記始点座標と前記終点座標とを結ぶ直線として記憶することを特徴とする請求項1に記載のナビゲーション装置。
- 前記境界線通過検出手段は、前記外積符号が、「負から0」もしくは「負から正」に変化したことによって、前記移動体が境界線を通過したことを検出することを特徴とする請求項1または請求項2に記載のナビゲーション装置。
- 前記境界線は、前記移動体が順番に通過していく、施設またはその手前ごとに存在することを特徴とする請求項1〜3のいずれか1項に記載のナビゲーション装置。
- 前記境界線通過検出手段によって前記移動体が前記境界線を通過したことを検出した場合に、移動体外部に設けられた情報端末に対して、無線通信を介して、前記境界線を通過した旨の情報を報知する報知手段を有することを特徴とする請求項1〜4のいずれか1項に記載のナビゲーション装置。
- 前記境界線に関連する報知情報を記憶する報知情報記憶部を備え、
前記境界線通過検出手段によって前記移動体が前記境界線を通過したことを検出した場合に、通過した境界線に関連する前記報知情報記憶部に記憶されている情報を、音声及び/または映像で、移動体及び/または前記情報端末に報知する報知手段を有することを特徴とする請求項1〜5のいずれか1項に記載のナビゲーション装置。 - 前記移動体が路線バスであり、
前記情報端末は、情報センタまたはバスの停留所に設置された情報掲示板であることを特徴とする請求項6に記載のナビゲーション装置。 - 前記情報掲示板は、バスの進行経路をドットの集合によって表現し、現在のバスの走行位置に対応した前記ドットを点灯することによって、前記バスの走行位置を報知するものであり、
前記境界線は、この情報掲示板に表示されたバスの位置を示す前記ドットに対応した位置に存在することを特徴とする請求項7に記載のナビゲーション装置。 - 移動体の進行方向と交差する境界線上に設けられた始点と終点を記憶する記憶手段を用いて、移動体位置を検出する移動体位置検出ステップと、
境界線上にある始点と終点とを結ぶ境界線ベクトルと、始点から移動体位置を結ぶ移動体位置ベクトルとの外積を計算する外積計算ステップと、
前記外積計算ステップによって、計算して得た外積の符号の変化に基づいて、前記移動体が前記境界線を横切ったか否かを検出する境界線通過検出ステップを有することを特徴とするナビゲーション方法。 - 移動体の進行方向と交差する境界線上に設けられた始点と終点を記憶する記憶手段を用いて、移動体位置を検出する移動体位置検出ステップと、
境界線上にある始点と終点とを結ぶ境界線ベクトルと、始点から移動体位置を結ぶ移動体位置ベクトルとの外積を計算する外積計算ステップと、
前記外積計算ステップによって、計算して得た外積の符号の変化に基づいて、前記移動体が前記境界線を横切ったか否かを検出する境界線通過検出ステップを、
ナビゲーション装置上で実行させることを特徴とするナビゲーション装置用プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008201936A JP5212978B2 (ja) | 2008-08-05 | 2008-08-05 | ナビゲーション装置、方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008201936A JP5212978B2 (ja) | 2008-08-05 | 2008-08-05 | ナビゲーション装置、方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010038727A true JP2010038727A (ja) | 2010-02-18 |
| JP5212978B2 JP5212978B2 (ja) | 2013-06-19 |
Family
ID=42011435
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008201936A Expired - Fee Related JP5212978B2 (ja) | 2008-08-05 | 2008-08-05 | ナビゲーション装置、方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5212978B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012038228A (ja) * | 2010-08-11 | 2012-02-23 | Nissan Motor Co Ltd | 逆走検知装置、逆走検知方法 |
| WO2013098958A1 (ja) * | 2011-12-27 | 2013-07-04 | 三菱電機株式会社 | ナビゲーション装置、ナビゲーション方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61233316A (ja) * | 1985-04-08 | 1986-10-17 | Tokyo Keiki Co Ltd | 航行警報装置 |
| JPH09264750A (ja) * | 1996-03-27 | 1997-10-07 | Aisin Aw Co Ltd | ナビゲーション装置 |
| JP2000161980A (ja) * | 1998-11-26 | 2000-06-16 | Sony Corp | 領域検索装置、測位装置および領域検索方法 |
| JP2001060299A (ja) * | 1999-08-23 | 2001-03-06 | Hitachi Denshi Ltd | バスロケーション通知システム |
| JP2003207346A (ja) * | 2002-01-11 | 2003-07-25 | Alpine Electronics Inc | 車載用ナビゲーション装置及び該装置における画像表示方法 |
-
2008
- 2008-08-05 JP JP2008201936A patent/JP5212978B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61233316A (ja) * | 1985-04-08 | 1986-10-17 | Tokyo Keiki Co Ltd | 航行警報装置 |
| JPH09264750A (ja) * | 1996-03-27 | 1997-10-07 | Aisin Aw Co Ltd | ナビゲーション装置 |
| JP2000161980A (ja) * | 1998-11-26 | 2000-06-16 | Sony Corp | 領域検索装置、測位装置および領域検索方法 |
| JP2001060299A (ja) * | 1999-08-23 | 2001-03-06 | Hitachi Denshi Ltd | バスロケーション通知システム |
| JP2003207346A (ja) * | 2002-01-11 | 2003-07-25 | Alpine Electronics Inc | 車載用ナビゲーション装置及び該装置における画像表示方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012038228A (ja) * | 2010-08-11 | 2012-02-23 | Nissan Motor Co Ltd | 逆走検知装置、逆走検知方法 |
| WO2013098958A1 (ja) * | 2011-12-27 | 2013-07-04 | 三菱電機株式会社 | ナビゲーション装置、ナビゲーション方法 |
| JP5518271B2 (ja) * | 2011-12-27 | 2014-06-11 | 三菱電機株式会社 | ナビゲーション装置、ナビゲーション方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5212978B2 (ja) | 2013-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113483772B (zh) | 基于返程行程延迟向用户提供交通警告 | |
| US7783416B2 (en) | Navigation server | |
| JP5362470B2 (ja) | 経路探索装置 | |
| JP2012225683A (ja) | カーナビゲーション装置 | |
| CN105973248A (zh) | 导航系统 | |
| JP5382356B2 (ja) | 運転アシストシステム | |
| CN101561291A (zh) | 车辆导航设备 | |
| US20200056903A1 (en) | Driving support system and computer program | |
| JP2011169620A (ja) | 動態管理システムおよび動態管理方法 | |
| US20150160032A1 (en) | Vehicular navigation system | |
| JP2004070795A (ja) | 情報提供装置、情報提供制御プログラム | |
| KR20150050837A (ko) | 운전자 성향에 따라 도착예정시간을 산출하는 시스템 및 그 운용방법 | |
| US10317241B2 (en) | Systems and methods for recognizing and measuring hard-to-reach destinations | |
| US10417665B2 (en) | Server, navigation device, and distribution exclusion area setting method in advertising information distribution system | |
| JP4609426B2 (ja) | 運転支援装置 | |
| JP5565561B2 (ja) | 運転アシストシステム | |
| JP5212978B2 (ja) | ナビゲーション装置、方法及びプログラム | |
| JP2008292323A (ja) | 経路案内システム | |
| JP5871946B2 (ja) | センター側システム、車両側システム及びプローブ情報システム | |
| JP2010276396A (ja) | ナビゲーション装置、およびそのルート表示方法 | |
| JP2009229199A (ja) | 到着予定時間算出装置、及び到着予定時間算出方法等 | |
| JP2003166841A (ja) | ナビゲーション装置および到着予想時刻提供方法 | |
| JP2006337114A (ja) | ナビゲーションシステム、マッチング方法、経路探索サーバおよびナビゲーション端末装置 | |
| KR100717843B1 (ko) | 대중교통정보를 이용한 개인항법장치 및 그 방법 | |
| JP5611103B2 (ja) | ナビゲーション装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110803 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120815 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120821 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121018 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121204 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5212978 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160308 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |