JP2010038682A - 回転角度検出装置 - Google Patents
回転角度検出装置 Download PDFInfo
- Publication number
- JP2010038682A JP2010038682A JP2008200780A JP2008200780A JP2010038682A JP 2010038682 A JP2010038682 A JP 2010038682A JP 2008200780 A JP2008200780 A JP 2008200780A JP 2008200780 A JP2008200780 A JP 2008200780A JP 2010038682 A JP2010038682 A JP 2010038682A
- Authority
- JP
- Japan
- Prior art keywords
- detection
- rotation angle
- detecting
- rotation
- rotating body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 121
- 239000011347 resin Substances 0.000 description 4
- 229920005989 resin Polymers 0.000 description 4
- 230000007423 decrease Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
Images


Landscapes
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
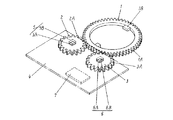
【解決手段】制御手段10が第一の検出体2と第二の検出体3の回転角度から、回転体1の回転角度を各々算出すると共に、これらを比較することによって、各平歯車部に破損や消耗、あるいは各検出手段に誤差が生じた場合等には、第一の検出体2と第二の検出体3の回転角度から各々算出した回転体1の回転角度の差異によって、これらの不具合を検出することができるため、簡易な構成で、回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
【選択図】図1
Description
図1は本発明の一実施の形態による回転角度検出装置の斜視図であり、同図において、1は絶縁樹脂または金属製の回転体で、側面外周には平歯車部1Aが形成されると共に、中央部には挿通するステアリング(図示せず)の軸と係合する係合部1Bが設けられている。
1A、2A、3A 平歯車部
1B 係合部
2 第一の検出体
3 第二の検出体
4 配線基板
5 第一の検出手段
5A、6A 磁石
5B、6B 磁気検出素子
6 第二の検出手段
10 制御手段
11 報知手段
Claims (2)
- ステアリングに連動して回転する回転体と、この回転体に連動して回転する第一及び第二の検出体と、この第一及び第二の検出体の回転を検出する第一及び第二の検出手段と、この第一及び第二の検出手段からの検出信号により上記回転体の回転角度を検出する制御手段からなり、上記制御手段が上記第一及び第二の検出体の回転角度から、上記回転体の回転角度を各々算出すると共に、これらを比較する回転角度検出装置。
- 報知手段を設けると共に、制御手段が検出した回転角度に応じて、この報知手段を作動する請求項1記載の回転角度検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008200780A JP5597914B2 (ja) | 2008-08-04 | 2008-08-04 | 回転角度検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008200780A JP5597914B2 (ja) | 2008-08-04 | 2008-08-04 | 回転角度検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010038682A true JP2010038682A (ja) | 2010-02-18 |
| JP5597914B2 JP5597914B2 (ja) | 2014-10-01 |
Family
ID=42011394
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008200780A Active JP5597914B2 (ja) | 2008-08-04 | 2008-08-04 | 回転角度検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5597914B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012073231A (ja) * | 2010-09-03 | 2012-04-12 | Panasonic Corp | 回転角度検出装置 |
| WO2017045930A1 (de) * | 2015-09-17 | 2017-03-23 | Bourns, Inc. | Lenkwinkelsensor mit funktioneller sicherheit |
Citations (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58103307U (ja) * | 1982-01-07 | 1983-07-14 | 株式会社明電舎 | 位置検出装置 |
| JPH11500828A (ja) * | 1995-02-28 | 1999-01-19 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 回転体における角度測定方法及び装置 |
| JP2001505667A (ja) * | 1997-09-11 | 2001-04-24 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 回転本体の角度の測定方法および装置 |
| JP2002213944A (ja) * | 2001-01-18 | 2002-07-31 | Niles Parts Co Ltd | 回転角測定装置 |
| JP2002531858A (ja) * | 1998-12-04 | 2002-09-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 回転体の角度位置を測定するための方法及び装置 |
| JP2002340619A (ja) * | 2001-05-16 | 2002-11-27 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
| JP2004077249A (ja) * | 2002-08-14 | 2004-03-11 | Okuma Corp | 補正機能付き位置検出器 |
| JP2004239670A (ja) * | 2003-02-04 | 2004-08-26 | Tokai Rika Co Ltd | 回転角度検出装置 |
| JP2005003625A (ja) * | 2003-06-16 | 2005-01-06 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
| JP2005017146A (ja) * | 2003-06-27 | 2005-01-20 | Tokai Rika Co Ltd | 回転角度検出装置 |
| JP2006003625A (ja) * | 2004-06-17 | 2006-01-05 | Ricoh Co Ltd | 画像形成装置 |
| JP2006194654A (ja) * | 2005-01-12 | 2006-07-27 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
| JP2006292529A (ja) * | 2005-04-11 | 2006-10-26 | Hitachi Cable Ltd | 回転角度測定装置 |
| WO2007094196A1 (ja) * | 2006-02-16 | 2007-08-23 | Matsushita Electric Industrial Co., Ltd. | トルク検出装置および回転角度検出装置 |
| JP2007256140A (ja) * | 2006-03-24 | 2007-10-04 | Matsushita Electric Ind Co Ltd | 回転角度・回転トルク検出装置 |
| JP2007278924A (ja) * | 2006-04-10 | 2007-10-25 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
| JP2008051668A (ja) * | 2006-08-25 | 2008-03-06 | Niles Co Ltd | 回転角度検出装置 |
| WO2008050843A1 (fr) * | 2006-10-25 | 2008-05-02 | The Furukawa Electric Co., Ltd. | Dispositif de détection d'angle de rotation |
| JP2009501918A (ja) * | 2005-07-18 | 2009-01-22 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 耐故障性を倍増させる位相信号の評価方法 |
| JP2009510918A (ja) * | 2005-09-29 | 2009-03-12 | インターデイジタル テクノロジー コーポレーション | Mimoビーム形成に基づくシングルキャリア周波数分割多元接続システム |
-
2008
- 2008-08-04 JP JP2008200780A patent/JP5597914B2/ja active Active
Patent Citations (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58103307U (ja) * | 1982-01-07 | 1983-07-14 | 株式会社明電舎 | 位置検出装置 |
| JPH11500828A (ja) * | 1995-02-28 | 1999-01-19 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 回転体における角度測定方法及び装置 |
| JP2001505667A (ja) * | 1997-09-11 | 2001-04-24 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 回転本体の角度の測定方法および装置 |
| JP2002531858A (ja) * | 1998-12-04 | 2002-09-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 回転体の角度位置を測定するための方法及び装置 |
| JP2002213944A (ja) * | 2001-01-18 | 2002-07-31 | Niles Parts Co Ltd | 回転角測定装置 |
| JP2002340619A (ja) * | 2001-05-16 | 2002-11-27 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
| JP2004077249A (ja) * | 2002-08-14 | 2004-03-11 | Okuma Corp | 補正機能付き位置検出器 |
| JP2004239670A (ja) * | 2003-02-04 | 2004-08-26 | Tokai Rika Co Ltd | 回転角度検出装置 |
| JP2005003625A (ja) * | 2003-06-16 | 2005-01-06 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
| JP2005017146A (ja) * | 2003-06-27 | 2005-01-20 | Tokai Rika Co Ltd | 回転角度検出装置 |
| JP2006003625A (ja) * | 2004-06-17 | 2006-01-05 | Ricoh Co Ltd | 画像形成装置 |
| JP2006194654A (ja) * | 2005-01-12 | 2006-07-27 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
| JP2006292529A (ja) * | 2005-04-11 | 2006-10-26 | Hitachi Cable Ltd | 回転角度測定装置 |
| JP2009501918A (ja) * | 2005-07-18 | 2009-01-22 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 耐故障性を倍増させる位相信号の評価方法 |
| JP2009510918A (ja) * | 2005-09-29 | 2009-03-12 | インターデイジタル テクノロジー コーポレーション | Mimoビーム形成に基づくシングルキャリア周波数分割多元接続システム |
| WO2007094196A1 (ja) * | 2006-02-16 | 2007-08-23 | Matsushita Electric Industrial Co., Ltd. | トルク検出装置および回転角度検出装置 |
| JP2007256140A (ja) * | 2006-03-24 | 2007-10-04 | Matsushita Electric Ind Co Ltd | 回転角度・回転トルク検出装置 |
| JP2007278924A (ja) * | 2006-04-10 | 2007-10-25 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
| JP2008051668A (ja) * | 2006-08-25 | 2008-03-06 | Niles Co Ltd | 回転角度検出装置 |
| WO2008050843A1 (fr) * | 2006-10-25 | 2008-05-02 | The Furukawa Electric Co., Ltd. | Dispositif de détection d'angle de rotation |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012073231A (ja) * | 2010-09-03 | 2012-04-12 | Panasonic Corp | 回転角度検出装置 |
| WO2017045930A1 (de) * | 2015-09-17 | 2017-03-23 | Bourns, Inc. | Lenkwinkelsensor mit funktioneller sicherheit |
| CN108027249A (zh) * | 2015-09-17 | 2018-05-11 | 柏恩氏股份有限公司 | 具有功能安全性的转向角度传感器 |
| KR20180067546A (ko) * | 2015-09-17 | 2018-06-20 | 보우린스, 인크. | 기능적 안전성을 구비한 스티어링 각센서 |
| US20180259367A1 (en) * | 2015-09-17 | 2018-09-13 | Bourns, Inc. | Steering Angle Sensor with Functional Security |
| JP2018527582A (ja) * | 2015-09-17 | 2018-09-20 | ボーンズ、インコーポレイテッド | 機能的安全性を有するステアリング角度センサ |
| US11009372B2 (en) * | 2015-09-17 | 2021-05-18 | Bourns, Inc. | Steering angle sensor with functional security |
| CN108027249B (zh) * | 2015-09-17 | 2021-07-16 | 柏恩氏股份有限公司 | 具有功能安全性的转向角度传感器 |
| KR102658164B1 (ko) * | 2015-09-17 | 2024-04-16 | 보우린스, 인크. | 기능적 안전성을 구비한 스티어링 각센서 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5597914B2 (ja) | 2014-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4415859B2 (ja) | 回転角度検出装置 | |
| JP3899821B2 (ja) | 回転角度検出装置 | |
| JP4567575B2 (ja) | 回転角度検出装置 | |
| JP2008026039A (ja) | 回転角度検出装置 | |
| JP2004184264A (ja) | 回転角度検出装置 | |
| JP4992516B2 (ja) | 回転角度検出装置 | |
| JP2007139741A (ja) | 回転角度検出装置 | |
| JP4432809B2 (ja) | 回転角度検出装置 | |
| JP2005003625A (ja) | 回転角度検出装置 | |
| JP5589458B2 (ja) | 回転角度・トルク検出装置 | |
| JP2012002519A (ja) | 回転角度・トルク検出装置 | |
| JP4607211B2 (ja) | 回転角検出装置 | |
| JP5597914B2 (ja) | 回転角度検出装置 | |
| JP2007322358A (ja) | 舵角センサ | |
| JP2005257364A (ja) | 回転角度・トルク検出装置 | |
| JP4622641B2 (ja) | 回転角度検出装置 | |
| JP2007256140A (ja) | 回転角度・回転トルク検出装置 | |
| JP2010112848A (ja) | 回転角度検出装置 | |
| JP2004245642A (ja) | ステアリング装置における回転角検出装置及びトルク検出装置 | |
| JP2008082826A (ja) | 回転角度・回転トルク検出装置 | |
| JP2010181310A (ja) | 回転角度・トルク検出装置 | |
| JP2008070130A (ja) | 回転角度検出装置 | |
| JP2010096518A (ja) | 回転角度検出装置 | |
| JP2011099727A (ja) | 回転角度検出装置及びこれを用いた回転角度・トルク検出装置 | |
| JP2009192456A (ja) | 回転角度検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110513 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20110614 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121127 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20121213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131101 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20140107 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20140417 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140715 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140728 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5597914 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |