JP2010024646A - 開閉部材制御装置 - Google Patents
開閉部材制御装置 Download PDFInfo
- Publication number
- JP2010024646A JP2010024646A JP2008184551A JP2008184551A JP2010024646A JP 2010024646 A JP2010024646 A JP 2010024646A JP 2008184551 A JP2008184551 A JP 2008184551A JP 2008184551 A JP2008184551 A JP 2008184551A JP 2010024646 A JP2010024646 A JP 2010024646A
- Authority
- JP
- Japan
- Prior art keywords
- opening
- closing member
- motor
- mask value
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Power-Operated Mechanisms For Wings (AREA)
- Window Of Vehicle (AREA)
Abstract
【解決手段】挟み込み判定の際に、モータMの起動直後にモータ回転速度が不安定になる領域で挟み込み判定を解除するマスク値Bを設定することができる挟み込み判定機能を有する開閉部材制御装置1において、マスク値Bは、ウィンドウ16を開閉動作するワイヤ25の経年変化による伸び量に応じて、ウィンドウ16の開閉動作に伴い自動的に補正される。
【選択図】図2
Description
このようなモータ回転数の変動による挟み込みの誤判定を防止するために、モータの起動後のマスク時間は長めに設定されているが、これにより、挟み込み判定のタイミングが遅延し、挟み込み力が大きくなる虞があった。
このように、マスク値は、開閉部材の前回の動作方向に応じて、所定の値に固定されたマスク値、又は、マスク値補正手段において補正されたマスク値のいずれかから選択されることで、開閉部材の動作パターンに応じて適切なマスク値を設定することができる開閉部材制御装置が得られる。
上記構成によって、開閉部材の開閉駆動毎にマスク値の補正が自動的に行われるため、マスク値は常時適正な値に保たれる。また、マスク値の補正のための特別な操作を必要としないことから使い勝手の良い開閉部材制御装置が得られる。
上記構成により、開閉部材が上限位置から下限位置まで移動する間のモータ作動量を、予め設定された基準値と比較して補正値を算出することで、開閉部材の可動範囲全体でのモータ作動量で比較することができるため、算出される補正値の誤差を少なくすることができる。また、モータ作動量の測定範囲を、開閉部材の上限位置から下限位置までとすることで、前回の開閉部材の動作パターンは常に閉動作となるためにモータ作動量の測定範囲での伝達部材の変化状態が一定となり、算出される補正値に誤差が生じる要因が少ない。
すなわち、正確にマスク値が補正されるため、高精度な挟み込み判定ができる開閉部材制御装置が得られる。
上記構成により、予め保存しておいた上端位置のモータ作動量から計測された下端位置のモータ作動量を減算することで、開閉部材が上限位置から下限位置までフルストローク移動する間のモータ作動量と等値のモータ作動量を得ることができる。また、開閉部材が開状態の可動端部位置に達したときの伝達部材の状態は一定であるため、精度よく補正値を算出することができる。すなわち、正確にマスク値が補正されるため、高精度な挟み込み判定ができる開閉部材制御装置が得られる。
このように、請求項4又は5で測定されたモータ作動量と比較される基準値を、その開閉部材制御装置で経年変化が生じる以前、つまり初期に測定されたそれぞれのモータ作動量とすることで、経年変化による差異を補正値として算出することができる。このため、伝達部材の寸法変化、特に経年変化による伸びに応じてマスク値を補正することができ、挟み込みの誤判定を長期間に渡って防止することができる開閉部材制御装置が得られる。
請求項2に係る開閉部材制御装置によれば、開閉部材の動作パターンに応じて適切なマスク値を設定することができる開閉部材制御装置が得られる。
請求項3に係る開閉部材制御装置によれば、マスク値の補正が、開閉部材の動作の度に自動的に行われる使い勝手の良い開閉部材制御装置が得られる。
請求項4と5に係る開閉部材制御装置によれば、高精度な挟み込み判定ができる開閉部材制御装置が得られる。
請求項6に係る開閉部材制御装置によれば、伝達部材の経年変化による伸びに応じてマスク値を補正することができ、長期間に渡って高精度な挟み込みの判定を行うことができる開閉部材制御装置が得られる。
以下の実施形態の説明において、伝達部材はワイヤ25に、開閉部材はウィンドウ16に、駆動状況検出手段はパルスセンサ3に、電源供給手段はバッテリ10に、補正値は変化量ΔDに、それぞれ相当する。
駆動手段2は、パルスセンサ3を備えるモータMを有している。モータMは、開閉部材を開閉動作させるための駆動源となるものであり、例えば、ブラシ付き直流モータやブラシレスモータ等により構成されている。
パルスセンサ3は、モータMの回転速度および回転方向を検出するためのものであり、モータMの一定の回転角度毎にパルス信号を出力することができるように構成されている。例えば、ホール素子、ロータリーエンコーダ、レゾルバ等により構成されている。パルスセンサ3から出力されたパルス信号は、後述するコントローラ8に入力される。
マイクロコンピュータ9は、開閉制御を行う演算部と、前回の作動方向や後述する初期マスク値Aなどを記憶する記憶部と、を有して構成されており、パルスセンサ3やスイッチ11、若しくは、温度センサ6、バッテリ10などから入力された信号に基づいて所定の処理を行い、駆動回路5を介してモータMを制御するものである。
ウィンドウ16の開閉部材制御装置1は、ドア15の窓枠に開閉可能に装着されたウィンドウ16と、ドア15側に取り付けられたモータMの出力軸に連結されたプーリ22と2つのローラ23,24と、リング状に形成されたワイヤ25と、を有して構成されている。
モータMは、ウィンドウ16を開閉動作させるための駆動源となるものであり、制御手段7によって駆動制御可能に構成されている。
ウィンドウ16は、その下端側にワイヤ25を係止できる固定部材16aが形成されている。
また、上下方向に配設された2つのローラ23,24の間の位置でワイヤ25が固定部材16aに係止されることで、ワイヤ25の動作に連動してウィンドウ16が開閉方向に動作する。
すなわち、モータMの駆動に連動してウィンドウ16が開閉動作可能に構成されている。
モータ回転速度が不安定になる原因としては、(ア)モータMの回転子のゴムダンパのねじれ、(イ)歯車間のバックラッシュなどの噛み合わせの遊び、(ウ)ウィンドウ16の動作パターンの違いによるワイヤ25のたるみ状態の変化、(エ)温度変化によるグリスの物性変化、(オ)経年変化によるワイヤ25の寸法変化、などが知られている。
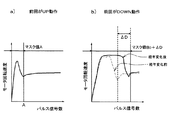
図3(a)はウィンドウ16の開動作時のワイヤ25の状態、図3(b)は閉動作時のワイヤの状態を示している。図3(a)に示すように、ウィンドウ16の開動作においては、ローラ23,24の間に位置する固定部材16aを下方に移動させるため、ワイヤ25の下方に引っ張り応力が負荷される。このため、ワイヤ25のたるみはプーリ22とローラ23の間に生じる。
すなわち、ウィンドウ16の開動作の後に閉動作を行う動作パターンの場合には、ウィンドウ16の閉動作の後に閉動作を行う動作パターンよりも、モータ回転速度が不安定になる範囲が増えることになる。
上述した(ア)〜(オ)に示したモータ回転速度が不安定になる原因を考慮してマスク処理を行う範囲(マスク値)が設定される。
適正なマスク値は、ウィンドウ16の動作パターンの違いによって変化する。そのため、ウィンドウ16の動作パターンが異なる場合の起動直後のモータの不安定な動作範囲を考慮して、ウィンドウ16の動作パターンに応じたマスク値が設定される。
図4(a)は、ウィンドウ16を閉動作(ウィンドウ16はUP)の後に閉動作(ウィンドウ16はUP)を行う動作パターンでのモータ起動直後のモータ回転角度と回転速度の関係図である。
本実施形態では、このモータ回転速度が不安定になる領域で挟み込み判定を解除するマスクを設定している。具体的には、モータ回転速度が不安定になるパルス信号数(モータ回転角度)を繰り返し測定して、そのうちの最大パルス信号数を選択し、これに数パルスを加算した値をマスク値Aとして設定する。
図4(a)と比べて、起動直後にモータ回転速度が一時的に大きな値を示す不安定な動作範囲が広くなっている。開動作の後に閉動作を行ったことから、生じたワイヤ25のたるみによってモータMに負荷が掛からない領域が増加したことが原因である。
このモータ回転速度が不安定になるパルス信号数(モータ回転角度)を繰り返し測定して、そのうちの最大パルス信号数を選択し、これに数パルスを加算した値を初期マスク値B0として設定する。
以下に、ワイヤ25の経年変化による伸びに応じたマスク値B0の補正方法を説明する。
図5(a)は、閉動作の後に閉動作を行う動作パターンでのモータ起動直後のモータ回転角度と回転速度の関係図である。
前回の動作が閉動作であるためローラ23側にはワイヤ25のたるみが生じておらず、経年変化していない初期のワイヤ25を用いた場合と同様の曲線を示している(図4(a)参照)。このため、挟み込み判定のためのマスクとして、初期のワイヤ25を使用して測定したマスク値Aをそのまま用いることができる。
図5(a)と比べて、起動直後にモータ回転速度が一時的に大きな値を示す不安定な動作領域が広くなっていると共に、図4(b)との比較においても、不安定な動作領域が広くなっている。経年変化によりワイヤ25が伸びたため、ローラ23側に生じたワイヤ25のたるみ量が増加したことが原因である。このワイヤ25が伸びた状態での適正なマスク値をマスク値Bとする。
モータ回転速度の不安定な動作領域が増加した領域を変化量ΔDとする。
上述したマスク値A及びマスク値B0は、いずれも固定値であるが、更新マスク値Bは、経年変化により徐々に変動する値であるため適宜更新する必要がある。しかも、開閉部材制御装置1が自動車に取り付けられた後に変化するため、マスク値Bを直接測定することは困難である。そこで、本実施形態において、マスク値Bは、マスク値B0に変化量ΔDを加えることで算出される。
変化量ΔDは、ウィンドウ16を全開状態から全閉状態まで動作させる際にモータMから出力されるパルス信号数を、初期状態と経年変化状態のそれぞれについて測定して比較することで算出される。
なお、変化量ΔDは、ウィンドウ16を全開状態から全閉状態まで動作させる際のパルス信号数から算出されているが、ウィンドウ16の全閉状態から全開状態までのパルス信号数から算出してもよい。
まず、マスク値設定手段として、図6に示したフローチャートに従って、ウィンドウ16の閉操作時の処理の流れを説明する。
閉スイッチが操作されて閉操作信号が入力されると(ステップS1)、前回の動作が閉動作であるか否かが判定される(ステップS2)。前回の動作が閉動作(ステップS2:Yes)であれば、マスクとしてマスク値Aを設定する(ステップS3)。一方、前回の動作が開動作(ステップS2:No)であれば、マスクとしてマスク値Bを設定する(ステップS4)。マスクの設定後にウィンドウ16の閉動作を行う(ステップS5)。
上端位置(全閉状態)のウィンドウ16が開操作されると、ウィンドウ16が下端位置(全開状態)まで移動されたか否かの判定が行われる(ステップS10)。ウィンドウ16が下端位置まで移動された場合(ステップS10:Yes)には、測定された回転角度D1とマイクロコンピュータ9の記憶部に保存されている初期回転角度D0との差から変化量ΔDを算出する(ステップS11)。そして、算出された変化量ΔDをマスク値B0に加算して得られた値をマスク値Bとする(ステップS12)。
なお、本実施形態においては、基準値としての初期回転角度D0を、経年変化前の初期状態でのモータMの作動量としているが、ワイヤ25の交換後など整備時の回転角度を初期回転角度D0とできることはもちろんである。
また、ウィンドウ16の下端位置でのモータ回転数のみから、回転角度D1を算出する構成としてもよい。この場合、基準値として予め保存しておいた上端位置のモータ回転数から下端位置のモータ回転数を減算することで回転角度D1を算出することができるため、マスク値Bの補正を高い頻度で行うことができる。また、ウィンドウ16が開状態の下端位置に達したときのワイヤ25の状態は一定であるため、精度よく変化量ΔDを算出することができる。
さらに、ウィンドウ16の動作に応じて自動的にマスク値Bが更新されることから、更新のための特別な操作を必要とせず、通常の使用条件において適宜マスク値Bの更新をすることができる。
Claims (6)
- モータにより伝達部材を介して開閉部材を開閉駆動する駆動手段と、
前記駆動手段の駆動状況を検出する駆動状況検出手段と、
前記駆動手段に電源を供給する電源供給手段と、
前記駆動手段の駆動を制御する制御手段と、
前記駆動状況検出手段により検出された前記モータの回転変化度合いを挟み込み判定のための閾値と比較して前記開閉部材の閉動作中における異物の挟み込みを検出する挟み込み判定手段と、を備える開閉部材制御装置において、
挟み込みの検出を解除するマスク値を前記開閉部材の動作パターンに応じて選択するマスク値設定手段と、
前記開閉部材の所定の動作における前記モータの作動量に基づいて算出された補正値に応じて前記マスク値を補正するマスク値補正手段と、を有することを特徴とする開閉部材制御装置。 - 前記マスク値設定手段においては、前記開閉部材の前回の動作方向に応じて、所定の値に固定されたマスク値、又は、前記マスク値補正手段において補正されたマスク値のいずれかから選択されることを特徴とする請求項1に記載の開閉部材制御装置。
- 前記マスク値補正手段による前記マスク値の補正は、前記開閉部材の開閉駆動毎に行われることを特徴とする請求項1又は2に記載の開閉部材制御装置。
- 前記補正値は、開閉部材が開状態の可動端部位置から閉状態の可動端部位置まで動作する間の前記駆動手段の作動量と基準値とを比較して算出されることを特徴とする請求項1乃至3のいずれか1項に記載の開閉部材制御装置。
- 前記補正値は、開閉部材が開状態の可動端部位置に達したときの前記駆動手段の作動量と基準値とを比較して算出されることを特徴とする請求項1乃至3のいずれか1項に記載の開閉部材制御装置。
- 前記基準値は、開閉部材が開状態の可動端部位置から閉状態の可動端部位置まで動作する間の前記モータの作動量、若しくは、開閉部材が閉状態の可動端部位置に達したときの前記モータの作動量のいずれかの初期値であることを特徴とする請求項4又は5のいずれか1項に記載の開閉部材制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184551A JP5378721B2 (ja) | 2008-07-16 | 2008-07-16 | 開閉部材制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184551A JP5378721B2 (ja) | 2008-07-16 | 2008-07-16 | 開閉部材制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010024646A true JP2010024646A (ja) | 2010-02-04 |
| JP5378721B2 JP5378721B2 (ja) | 2013-12-25 |
Family
ID=41730727
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008184551A Active JP5378721B2 (ja) | 2008-07-16 | 2008-07-16 | 開閉部材制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5378721B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102635287A (zh) * | 2011-02-10 | 2012-08-15 | 阿斯莫株式会社 | 可打开可关闭构件控制装置及具有该装置的车辆 |
| JP2016148151A (ja) * | 2015-02-10 | 2016-08-18 | アスモ株式会社 | 車両窓開閉装置 |
| WO2018012515A1 (ja) * | 2016-07-12 | 2018-01-18 | アスモ 株式会社 | 開閉部材駆動装置 |
| JP2020076264A (ja) * | 2018-11-08 | 2020-05-21 | 株式会社デンソー | 開閉体制御装置及びモータ |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08158738A (ja) * | 1994-12-01 | 1996-06-18 | Nippondenso Co Ltd | ウィンドウ開閉制御装置 |
| JPH08331877A (ja) * | 1995-06-02 | 1996-12-13 | Matsushita Electric Ind Co Ltd | 車両用窓電動開閉機構の安全装置 |
| JP2001098842A (ja) * | 1999-09-29 | 2001-04-10 | Mitsuba Corp | 自動車用開閉体制御装置 |
| JP2005083052A (ja) * | 2003-09-08 | 2005-03-31 | Asmo Co Ltd | 開閉部材制御装置 |
| JP2006132263A (ja) * | 2004-11-09 | 2006-05-25 | Alps Electric Co Ltd | 挟み込み検知機能付きパワーウインド装置 |
| JP2006132362A (ja) * | 2004-11-04 | 2006-05-25 | Nissan Motor Co Ltd | 燃料フィルタの取り付け構造 |
-
2008
- 2008-07-16 JP JP2008184551A patent/JP5378721B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08158738A (ja) * | 1994-12-01 | 1996-06-18 | Nippondenso Co Ltd | ウィンドウ開閉制御装置 |
| JPH08331877A (ja) * | 1995-06-02 | 1996-12-13 | Matsushita Electric Ind Co Ltd | 車両用窓電動開閉機構の安全装置 |
| JP2001098842A (ja) * | 1999-09-29 | 2001-04-10 | Mitsuba Corp | 自動車用開閉体制御装置 |
| JP2005083052A (ja) * | 2003-09-08 | 2005-03-31 | Asmo Co Ltd | 開閉部材制御装置 |
| JP2006132362A (ja) * | 2004-11-04 | 2006-05-25 | Nissan Motor Co Ltd | 燃料フィルタの取り付け構造 |
| JP2006132263A (ja) * | 2004-11-09 | 2006-05-25 | Alps Electric Co Ltd | 挟み込み検知機能付きパワーウインド装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102635287A (zh) * | 2011-02-10 | 2012-08-15 | 阿斯莫株式会社 | 可打开可关闭构件控制装置及具有该装置的车辆 |
| DE102012100944A1 (de) | 2011-02-10 | 2012-08-16 | Asmo Co., Ltd. | Steuervorrichtung für Schließ- und Öffnungselemente, sowie Fahrzeug, das diese aufweist |
| JP2012167433A (ja) * | 2011-02-10 | 2012-09-06 | Asmo Co Ltd | 開閉部材制御装置及び車両 |
| US8655555B2 (en) | 2011-02-10 | 2014-02-18 | Asmo Co., Ltd. | Openable and closable member control apparatus and vehicle having the same |
| CN102635287B (zh) * | 2011-02-10 | 2016-05-25 | 阿斯莫株式会社 | 可打开可关闭构件控制装置及具有该装置的车辆 |
| JP2016148151A (ja) * | 2015-02-10 | 2016-08-18 | アスモ株式会社 | 車両窓開閉装置 |
| WO2018012515A1 (ja) * | 2016-07-12 | 2018-01-18 | アスモ 株式会社 | 開閉部材駆動装置 |
| US10815714B2 (en) | 2016-07-12 | 2020-10-27 | Denso Corporation | Opening/closing member driving device |
| JP2020076264A (ja) * | 2018-11-08 | 2020-05-21 | 株式会社デンソー | 開閉体制御装置及びモータ |
| US11142940B2 (en) | 2018-11-08 | 2021-10-12 | Denso Corporation | Open-close body controller and motor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5378721B2 (ja) | 2013-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5592285B2 (ja) | 開閉部材制御装置及び車両 | |
| US7411364B2 (en) | Window opening and closing controller | |
| US7690152B2 (en) | Opening and closing member control system | |
| JP6390466B2 (ja) | 開閉部材制御装置及び開閉部材制御方法 | |
| US7812554B2 (en) | Control device for opening/closing member | |
| US6166508A (en) | Process for controlling the displacement of the window pane of a motor vehicle door | |
| US8620531B2 (en) | Method and device for correction temperature-dependent changes in the mechanical properties of a mobile closing part of a vehicle | |
| JP5378721B2 (ja) | 開閉部材制御装置 | |
| US20060220604A1 (en) | Opening and closing member control system | |
| US20070153434A1 (en) | Motor controller and motor temperature estimation method for the same | |
| EP3115538A1 (en) | Drive apparatus | |
| US6633148B1 (en) | Drive device and method for moving a vehicle part | |
| US7982589B2 (en) | Window glass control apparatus | |
| JP4981431B2 (ja) | 車両用開閉体の制御装置 | |
| JP2013217068A (ja) | 開閉部材制御装置 | |
| JPH08158738A (ja) | ウィンドウ開閉制御装置 | |
| JP2008150830A (ja) | 車両用開閉体の制御装置 | |
| JP6930168B2 (ja) | 開閉体駆動装置 | |
| JP4781222B2 (ja) | 開閉体制御装置 | |
| JPH10262385A (ja) | ウインドウ開閉制御装置 | |
| JP4167621B2 (ja) | 挟み込み検出方法および車両用可動体駆動装置 | |
| JP2004232280A (ja) | 開閉体の挟み込み検知装置 | |
| JP7365927B2 (ja) | 車両用開閉体制御装置 | |
| JP4579757B2 (ja) | 開閉部材制御装置 | |
| JP2018105026A (ja) | 電動スライドドアの挟み込み検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110317 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120824 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121030 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130402 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130531 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130924 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130926 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5378721 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |