JP2009041982A - 多点プローブの零点誤差関連値記録装置 - Google Patents
多点プローブの零点誤差関連値記録装置 Download PDFInfo
- Publication number
- JP2009041982A JP2009041982A JP2007205341A JP2007205341A JP2009041982A JP 2009041982 A JP2009041982 A JP 2009041982A JP 2007205341 A JP2007205341 A JP 2007205341A JP 2007205341 A JP2007205341 A JP 2007205341A JP 2009041982 A JP2009041982 A JP 2009041982A
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- value
- zero
- error
- sensors
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000523 sample Substances 0.000 title claims abstract description 126
- 238000006073 displacement reaction Methods 0.000 claims abstract description 64
- 238000005259 measurement Methods 0.000 claims description 155
- 238000005070 sampling Methods 0.000 description 18
- 238000000034 method Methods 0.000 description 11
- 230000014509 gene expression Effects 0.000 description 8
- 238000001514 detection method Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- NAWXUBYGYWOOIX-SFHVURJKSA-N (2s)-2-[[4-[2-(2,4-diaminoquinazolin-6-yl)ethyl]benzoyl]amino]-4-methylidenepentanedioic acid Chemical compound C1=CC2=NC(N)=NC(N)=C2C=C1CCC1=CC=C(C(=O)N[C@@H](CC(=C)C(O)=O)C(O)=O)C=C1 NAWXUBYGYWOOIX-SFHVURJKSA-N 0.000 description 1
- 238000012935 Averaging Methods 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000002706 hydrostatic effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images


Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
【解決手段】
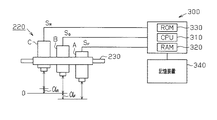
零点誤差関連値記録装置は試料を回転させるスピンドルと、複数の変位センサA,B,Cを含む真直形状測定用のセンサユニット220を試料の測定面に相対するように支持するセンサキャリッジ230を備える。試料が所定回転角度回転する毎に変位センサA,B,Cから、試料の測定面における同心円に沿う形状値f(rF,θ),f(r0,θ),f(rR,θ)及び零点誤差を含む測定値をCPU310が読取り、読取りした形状値及び零点誤差を含む測定値を記憶装置340に記憶する。
【選択図】図1
Description
しかし、一旦、零点誤差を解消したり、或いは、反転法等を使用して零点誤差を補償しても、時間が経過した場合、変位センサの取付け位置がドリフトなどによって、3つの変位センサ間の零点誤差が変動していることがある。
請求項4の発明は、請求項2又は請求項3において、前記多点プローブ支持手段が、前記回転手段の径方向に移動可能に設けられ、前記測定値には、多点プローブ支持手段が前記径方向において複数の位置に移動されて、それぞれの位置において、前記測定対象物を前記回転手段にて少なくとも1回転以上回転させた際に得られた値の平均値を含むことを特徴とする。
請求項5の発明は、請求項3又は請求項4において、前記多点プローブ支持手段が支持する複数のセンサが前記多点プローブ支持手段の移動方向に離れて設置した3つの変位センサであることを特徴とする。
請求項6の発明は、請求項3又は請求項4において、前記多点プローブ支持手段が支持する複数のセンサが前記多点プローブ支持手段の移動方向に離れて設置した2つの2次元角度センサであることを特徴とする。
請求項4の発明によれば、半径の異なる複数の位置で多点プローブが測定面を測定する行い、その測定値の平均が取られると、測定値に含まれる偶然誤差が少なくなるため、その結果、零点誤差の変動量の算出において、該変動量に含まれる偶然誤差を少なくすることができる。
請求項6の発明によれば、多点プローブが2つの2次元角度センサにおける零点誤差の変動量を容易に求めることができる。
以下、本発明の多点プローブの零点誤差関連値記録装置(以下、単に零点誤差関連値記録装置という)を具体化した第1実施形態を図1及び図2を参照して説明する。
本実施形態では、前記変位センサA,B,Cは、非接触式のセンサであって、静電容量型センサからなる。なお、変位センサは、非接触式の静電容量型センサに限定されるものではなく、接触式でもよく、或いは、非接触式の場合、静電容量型センサに代えて、例えば、光学センサとしてもよい。
さて、試料200における測定面202の半径rF,r0,rRの円周上の形状をf(rF,θ),f(r0,θ),f(rR,θ)、各変位センサA,B,Cの出力(すなわち、測定値)をSF,S0,SRとする。又、ez(θ),Φy(θ)をそれぞれ試料200のz軸方向の運動誤差、スピンドル210の回転軸のy軸周りの傾きによって生ずる運動誤差とすると、変位センサA,B,Cの出力(すなわち、測定値)はSF,S0,SRは、式(1)〜式(3)で表わすことができる。ここで、式(1)中のαFは、変位センサBを基準とした、変位センサAの零点誤差である。又、式(3)中のαRは、変位センサBを基準とした、変位センサCの零点誤差である。又、式(1)〜式(3)中のf(rF,θ),f(r0,θ),f(rR,θ)は測定対象物の測定面における同心円に沿う形状値に相当する。

例えば、変位センサBのx軸上の位置は前記リニアエンコーダで検出され、変位センサA,Cの位置は、変位センサBの検出された位置とd1,d2に基づいてCPU310により算出される。
1回目の記録では、試料200を1回転させ、各変位センサA,B,Cからの変位出力に添字「1」を付して、変位センサA,B,Cの出力(すなわち、測定値)を表わすと、SF,S0,SRは、式(4)〜式(6)で表わすことができる。
この1回目の測定値は第2測定値に相当する。
1回目の測定後においては、温度ドリフト等によって変位センサA,B,Cの零点誤差が変動する。そこで、1回目の測定及び記録がされた後、新たにワークの表面形状を測定する場合、2回目の測定においては、コンピュータシステム300のCPU310は、試料200が1回転中に入力された変位センサA,B,Cから得られた各測定値の平均値等を「1回目の測定及び記録」と同様に算出する。そして、CPU310はその算出結果等を記憶装置340に記憶する。この2回目の測定値は第1測定値に相当する。
(1) 零点誤差関連値記録装置は、測定面202を有する試料200(測定対象物)と、試料200を回転させるスピンドル210(回転手段)と、複数の変位センサA,B,Cを含む真直形状測定用のセンサユニット220(多点プローブ)を試料200の測定面202に相対するように支持するセンサキャリッジ230(多点プローブ支持手段)を備える。又、零点誤差関連値記録装置は、試料200が1回転する間において、試料200が所定回転角度回転する毎に変位センサA,B,Cから、試料200の測定面202における同心円に沿う形状値f(rF,θ),f(r0,θ),f(rR,θ)及び零点誤差を含む測定値を読取るCPU310(読取り手段)を備えるようにした。そして、零点誤差関連値記録装置は、読取りした形状値及び零点誤差を含む測定値を読出し可能に記憶する記憶装置340(記憶手段)を備えるようにした。
(3) 本実施形態の零点誤差関連値記録装置は、第1測定値、及び第2測定値には、試料200をスピンドル210(回転手段)にて1回転回転させた際に得られた値の平均値を含むようにした。この結果、本実施形態の零点誤差関連値記録装置は、同一の試料200を測定して得られた第1測定値と第2測定値がそれぞれ平均値であるため、測定面202の形状値を不変となる。これは、測定面202は、円周方向の測定開始位置(すなわち、測定開始点)がずれても、その測定開始点から1周分したときに得られた測定値の平均値である測定面の形状値が不変となることを利用している。この結果、零点誤差の変動量の算出の際に形状値の影響を受けることがない。
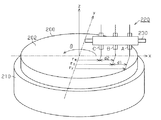
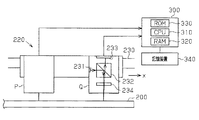
次に、第2実施形態の零点誤差関連値記録装置を図3〜7を参照して説明する。なお、第1実施形態と同一又は相当する構成については同一符号を付す。第2実施形態は多点プローブであるセンサユニット220に2つの角度センサP,Qを備えていることが第1実施形態と異なっている。
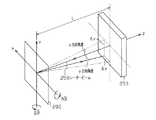
2次元角度センサは基本的に試料200や図示しないワークの面の2次元傾斜を検出するためのものである。入射ビームを細くすることにより、表面の2次元局部スロープの検出に用いることができる。2次元傾斜を検出するには、図6に示す光てこと呼ばれる方法が一番簡便な方法として知られている。
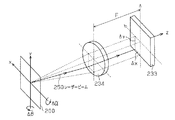
このため、図7に示すように試料200とPSD233の間にコリメートレンズ(すなわち、対物レンズ234)を入れ、オートコリメーションの原理によって角度検出を行う。図7に示すように、対物レンズ234を試料200とPSD233の間に置くと、試料面傾斜とPSD233上の光点座標との関係は対物レンズ234の焦点距離Fのみに依存することになり、傾斜検出精度は向上できる。この場合の傾斜角は次式のように表される。
図4に示すように試料200は、スピンドル210上に搭載されて回転可能にされている。センサユニット220は、図5に示すようにセンサキャリッジ230によりx方向に移動可能であり、試料200がスピンドル210により回転しているときに、試料200の表面を走査する。センサユニット220中には2つの角度センサP,Qという)がx方向に沿うように間隔dを介して設置されている。
図5は、センサユニット220で測定する試料面のデータのサンプリング点を示す図である。図5に示すように、x方向の走査は、試料200の回転中心から始まっており、各サンプリング点(すなわち、サンプリング位置)はxi(i=1,2,…,M)とする。2つの角度センサP,Qの間隔dとサンプリング間隔sは径方向において同じとする。サンプリング点xiにおいて、試料200上の二つの同心円がセンサユニット220内の2つの角度センサP,Qによって走査される。円周上のサンプリング位置をθj(j=1,2,…,N)とする。センサユニット220のx方向出力(y軸回りの局部スロープに対応)μPy(xi,θj),μQy(xi,θj)はそれぞれ次のように表される。なお、サンプリング位置(xi,θj)は、図示しないリニアエンコーダやロータリエンコーダ等の位置センサで検出可能である。
さて、上記のように構成された零点誤差関連値記録装置の作用を説明する。
(1回目の測定及び記録)
まず、センサユニット220の角度センサP,Qがサンプリング点xi,xi+1にそれぞれ位置するときにおいて、スピンドル210により試料200を回転中心(すなわち、z軸)の周りで1回転させる。この1回転中において、露点記録装置は所定回転角度経過する毎に、角度センサP,Qの測定値を入力し、記憶手段としての記憶装置340に格納する。なお、所定回転角度は、例えば1度であってよく、0.5度でもよく、限定されるものではない。
1回転された後、コンピュータシステム300のCPU310は、1回転している際に入力された角度センサP、Qから得られた各測定値の平均値を算出する。
1回目の測定後においては、温度ドリフト等によって角度センサP,Qの零点誤差が変動する。そこで、1回目の測定及び記録がされた後、新たにワークの表面形状を測定する場合、2回目の測定においては、コンピュータシステム300のCPU310は、試料200が1回転中に入力された角度センサP,Qから得られた各測定値の平均値等を「1回目の測定及び記録」と同様に算出する。そして、CPU310はその算出結果等を記憶装置340に記憶する。この2回目の測定値は第1測定値に相当する。
以上のようにして、温度ドリフト等によって角度センサP,Qの零点誤差の変動があった場合、上記の零点誤差関連値記録装置によって、零点誤差の変動量が求められ、精度の高い零点補償を行うことができる。
(1) 本実施形態の零点誤差関連値記録装置は、センサキャリッジ230(多点プローブ支持手段)が支持する複数の角度センサP,Qがセンサキャリッジ230の移動方向に離れて設置されている。この結果、センサユニット220(多点プローブ)が2つの角度センサP,Qにおける零点誤差の変動量を容易に求めることができ、この変動量に基づいて、容易に複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる。
○ 第1実施形態では、試料200を1回転したときの、各変位センサA,B,Cの出力の平均値を算出したが、2回転、或いは3回転以上を回転させてその各変位センサの出力の平均値を算出するようにしてもよい。なお、本明細書において、1回転以上とは整数回転させることを意味している。
○ 第2実施形態においては、2次元角度センサを使用したが、2次元である必要はない。2つのセンサを結ぶ線を図4のX軸としたとき、Y軸周りの角度を測定できるものであればよい。又、角度センサの方式、構造も第2実施形態で説明した2次元角度センサに限定されるものではなく、他の構造に変更してもよい。
210…スピンドル(回転手段)、
220…センサユニット(多点プローブ)、
230…センサキャリッジ(多点プローブ支持手段)、
300…コンピュータシステム、
310…CPU(読取り手段、算出手段)、
340…記憶装置(記憶手段)、
A,B,C…変位センサ、
P,Q…角度センサ。
Claims (6)
- 測定面を有する測定対象物と、
前記測定対象物を回転させる回転手段と、
複数のセンサを含む真直形状測定用の多点プローブを前記測定対象物の測定面に相対するように支持する多点プローブ支持手段と、
少なくとも前記測定対象物が1回転する間において、前記測定対象物が所定回転角度回転する毎に前記複数のセンサから、前記測定対象物の測定面における同心円に沿う形状値及びプローブの零点誤差に基づく誤差を含む測定値を読取る読取り手段と、
前記読取り手段が読取りした測定値を読出し可能に記憶する記憶手段とを備えたことを特徴とする多点プローブの零点誤差関連値記録装置。 - 前記測定値は、前記測定対象物を前記回転手段にて少なくとも1回転以上回転させた際に得られた値の平均値であることを特徴とする請求項1に記載の多点プローブの零点誤差関連値記録装置。
- 前記記憶手段には、同一の前記測定対象物に関して測定されて記憶された新しい測定値(以下、第1測定値という)と、第1測定値の取得時期よりも取得時期が古い測定値(以下、第2測定値という)とが記憶され、
さらに、第1測定値と第2測定値に基づいて、零点誤差の変動量を算出する算出手段を備えたことを特徴とする請求項2に記載の多点プローブの零点誤差関連値記録装置。 - 前記多点プローブ支持手段が、前記回転手段の径方向に移動可能に設けられ、
前記測定値には、多点プローブ支持手段が前記径方向において複数の位置に移動されて、それぞれの位置において、前記測定対象物を前記回転手段にて少なくとも1回転以上回転させた際に得られた値を含むことを特徴とする請求項2又は請求項3に記載の多点プローブの零点誤差関連値記録装置。 - 前記多点プローブ支持手段が支持する複数のセンサが前記多点プローブ支持手段の移動方向に離れて設置した3つの変位センサであることを特徴とする請求項3又は請求項4に記載の多点プローブの零点誤差関連値記録装置。
- 前記多点プローブ支持手段が支持する複数のセンサが前記多点プローブ支持手段の移動方向に離れて設置した2つの2次元角度センサであることを特徴とする請求項3又は請求項4に記載の多点プローブの零点誤差関連値記録装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007205341A JP4980817B2 (ja) | 2007-08-07 | 2007-08-07 | 多点プローブの零点誤差関連値記録装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007205341A JP4980817B2 (ja) | 2007-08-07 | 2007-08-07 | 多点プローブの零点誤差関連値記録装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009041982A true JP2009041982A (ja) | 2009-02-26 |
| JP4980817B2 JP4980817B2 (ja) | 2012-07-18 |
Family
ID=40442883
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007205341A Active JP4980817B2 (ja) | 2007-08-07 | 2007-08-07 | 多点プローブの零点誤差関連値記録装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4980817B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014137274A (ja) * | 2013-01-16 | 2014-07-28 | Sumitomo Heavy Ind Ltd | 幾何学量取得装置及び幾何学量取得方法 |
| CN113601514A (zh) * | 2021-09-29 | 2021-11-05 | 季华实验室 | 机器人手眼标定精度验证系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001041733A (ja) * | 1999-07-30 | 2001-02-16 | Univ Chuo | 表面形状計測装置 |
| JP2003161615A (ja) * | 2001-11-26 | 2003-06-06 | Tohoku Techno Arch Co Ltd | 表面形状測定装置 |
| JP2006337112A (ja) * | 2005-05-31 | 2006-12-14 | Nagase Integrex Co Ltd | 逐次3点法における零点誤差補正方法及び零点誤差補正装置 |
| JP2008524576A (ja) * | 2004-12-16 | 2008-07-10 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 直定規の直線度測定のための順次式マルチプローブ法 |
| JP2009008483A (ja) * | 2007-06-27 | 2009-01-15 | Satoshi Kiyono | 被測定面の測定方法 |
-
2007
- 2007-08-07 JP JP2007205341A patent/JP4980817B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001041733A (ja) * | 1999-07-30 | 2001-02-16 | Univ Chuo | 表面形状計測装置 |
| JP2003161615A (ja) * | 2001-11-26 | 2003-06-06 | Tohoku Techno Arch Co Ltd | 表面形状測定装置 |
| JP2008524576A (ja) * | 2004-12-16 | 2008-07-10 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 直定規の直線度測定のための順次式マルチプローブ法 |
| JP2006337112A (ja) * | 2005-05-31 | 2006-12-14 | Nagase Integrex Co Ltd | 逐次3点法における零点誤差補正方法及び零点誤差補正装置 |
| JP2009008483A (ja) * | 2007-06-27 | 2009-01-15 | Satoshi Kiyono | 被測定面の測定方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014137274A (ja) * | 2013-01-16 | 2014-07-28 | Sumitomo Heavy Ind Ltd | 幾何学量取得装置及び幾何学量取得方法 |
| CN113601514A (zh) * | 2021-09-29 | 2021-11-05 | 季华实验室 | 机器人手眼标定精度验证系统 |
| CN113601514B (zh) * | 2021-09-29 | 2022-01-18 | 季华实验室 | 机器人手眼标定精度验证系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4980817B2 (ja) | 2012-07-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6149337B1 (ja) | 表面形状測定装置 | |
| US8321167B2 (en) | Surveying instrument and surveying compensation method | |
| JPH1183438A (ja) | 光学式測定装置の位置校正方法 | |
| US7385214B2 (en) | System and method for correcting systematic error of, and calibrating for, tilt angle of surface topology sensor head having plurality of distance sensors | |
| JP6657552B2 (ja) | 平面度測定方法 | |
| JP4980818B2 (ja) | 多点プローブの零点誤差の変動検出方法 | |
| JP2009068957A (ja) | 真直度測定装置、厚み変動測定装置及び直交度測定装置 | |
| JP4890188B2 (ja) | 運動誤差測定基準体及び運動誤差測定装置 | |
| JP5158791B2 (ja) | 測定装置 | |
| JP2008008879A (ja) | 測定装置、測定基準及び精密工作機械 | |
| JP4980817B2 (ja) | 多点プローブの零点誤差関連値記録装置 | |
| US9151593B2 (en) | System and method for positioning a processing tool in relation to a workpiece | |
| JP5290038B2 (ja) | 測定装置及び測定方法 | |
| JP2006234427A (ja) | 平面度測定方法と装置 | |
| JP5246952B2 (ja) | 測定方法 | |
| JP5032741B2 (ja) | 3次元形状測定方法及び3次元形状測定装置 | |
| JP2009145152A (ja) | 測定装置 | |
| JP3245003B2 (ja) | 距離計測装置及びその方法 | |
| JP2011145151A (ja) | 回折格子の形状誤差評価方法 | |
| JP6181935B2 (ja) | 座標測定機 | |
| JP2010085341A (ja) | 球面形状測定装置および球面形状測定方法 | |
| JP2001165629A (ja) | 形状測定装置及び形状測定方法 | |
| CN107238353B (zh) | 一种基于曲面基准件的旋转角测量方法 | |
| JP6137544B2 (ja) | 真円度測定装置 | |
| JP2579726B2 (ja) | 接触式プローブ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100517 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120316 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120403 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120419 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150427 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4980817 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |