JP2007237342A - 水平多関節ロボット - Google Patents
水平多関節ロボット Download PDFInfo
- Publication number
- JP2007237342A JP2007237342A JP2006063936A JP2006063936A JP2007237342A JP 2007237342 A JP2007237342 A JP 2007237342A JP 2006063936 A JP2006063936 A JP 2006063936A JP 2006063936 A JP2006063936 A JP 2006063936A JP 2007237342 A JP2007237342 A JP 2007237342A
- Authority
- JP
- Japan
- Prior art keywords
- wrist
- arm
- cable
- winding
- articulated robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Manipulator (AREA)
Abstract
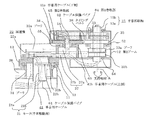
【解決手段】 本発明の水平多関節ロボットは、本体に関節を介して設けた第1アーム11と、第1アームに関節を介して設けた第2アーム12と、第2アームの先端部に設けられた上側と下側の二つの手首からなる手首部18と、二つの手首を駆動する手首回転軸15と、第2アームに設けられ手首部を駆動するモータ21と、第2アームに設けられ手首部のうち下側の手首に挿通されるエア配管あるいは電気配線等のケーブルを巻き取る巻取部とを有するもので、ケーブルの巻取部は、手首回転軸に設けた第1巻取部64と、第1巻取部の水平位置に回転可能に設けられたプーリを有しかつタイミングベルト38で連結された第2巻取部65とを有し、第1巻取部の回転に連動して第2巻取部を回動する。
【選択図】 図1
Description
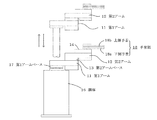
このロボットは、胴体16と第1アームベース17との間の第1関節部、第1アームと第2アームとの間の第2関節部、第2アーム12と手首部18との間の回転、および上下動の合計5自由度で構成されている。上側のケーブルの巻取部は、ケーシング14内に設けてある。
図4は、従来のケーブルの巻取部が用いられている水平多関節ロボットの部分側断面図である。図において、15は手首回転軸、41は手首用ケーブルである。手首回転軸15は外側軸15aと、中心軸15bの中空状の二重構造になっている。手首用ケーブル41は、圧縮エアや負圧を供給するためのエアチューブ、電気配線あるいはセンサ用の光ファイバケーブル等各種の可撓性をする線材が含まれる。そして、図2の下側手首18aと上側手首18bに対応して、下側の手首用ケーブル41aと上側の手首用ケーブル41bが挿通されている。
下側の手首用ケーブル41aは、手首回転軸15の中心線Aを中心として、手首回転方向に弾性的に巻き回した状態でケーシング14に収容されている。そして、ケーシング14内で一端を第2アーム12に固定されて、手首の回動により巻き回される。
また、このようなケーブルの処理方法と類似した他の例も提案されている(例えば、特許文献1参照)。
そこで、本発明は水平多関節ロボットの手首部において配管や電気配線等のケーブルの折れ曲がりによる断線、配管の詰まり等のトラブルを生じないスムーズなケーブル巻取りができる水平多関節ロボットを提供することを目的とする。
請求項1記載の発明は、本体に関節を介して設けた第1アームと、前記第1アームに関節を介して設けた第2アームと、前記第2アームの先端部に設けられた上側と下側の二つの手首からなる手首部と、前記二つの手首を駆動する手首回転軸と、前記第2アームに設けられ前記手首部を駆動する手首駆動のモータと、前記第2アームに設けられ前記手首部のうち上側の手首に挿通されるエア配管あるいは電気配線等のケーブルを巻き取る巻取部とを有する水平多関節ロボットにおいて、前記ケーブルの巻取部は、前記手首回転軸に設けた第1巻取部と、前記第1巻取部の水平位置に回転可能に設けられたプーリを有しかつタイミングベルトで連結された第2巻取部とを有し、前記第1巻取部の回転に連動して前記第2巻取部を回動するものである。
請求項2記載の発明は、前記第2巻取部は、前記第2アームに軸受を有する支持部材を設けたものである。
請求項3記載の発明は、前記第2巻取部のプーリの軸は、ケーブルを挿通しかつ保護するパイプになっているものである。
請求項2、3の発明によれば、アームの関節部における断線あるいは折れ曲がりを確実に防止した状態でケーブルをアーム内部に収容できるので、手首のスムーズな回動を確実にすることができる多関節ロボットを得ることができる。
第2アームベース13に設けられた第2アーム12の回転中心にある開口部は、手首用ケーブル41の挿通路であり、下側の手首用ケーブル41aと上側の手首用ケーブル41bは、それぞれこの開口部に取付けられたケーブル保護パイプ61に挿通され、第2アーム12内で下側の手首用ケーブル41aと上側の手首用ケーブル41bに分岐して配線処理される。
下側の手首用ケーブル41aは、ケーシング14内に設けられたケーブル巻取り機構用のプーリ34の回転中心の開口部に取付けられたケーブル保護用パイプ62に挿通される。プーリ34は、第2アーム12の底面に取付けられた支持部材63に嵌合された軸受55により軸承されている。このプーリ34の上面にプーリ34と同軸上に円環状の第2巻取部65が取付けられ、保護パイプ62に挿通された手首用の上側の手首用ケーブル41bは、この第2巻取部65の内側で固定され、周壁1箇所に設けられた切り欠き窓から、部材外周を巻き回される。第2アーム12の先端の外側軸には、ケーブル巻取り機構用のプーリ35が取付けられ、このプーリ35の上面にプーリ35と同軸上に円環状の第1巻取部64が取付けられている。第2巻取部65から巻き回された手首用ケーブル41aは第2巻取部65の外周を巻き回され、第1巻取部64の周壁1箇所に設けられた切り欠き窓により第1巻取部64の円環内部に入り固定され、外側軸15aの上面に設けられた下側の手首用ケーブル41a用の開口部に挿通される。プーリ34とプーリ35との間にはタイミングベルト38が巻き掛けされており、外側軸15aの回動に連動して巻き取り機構が回動するため、手首用ケーブル41aは第2巻取部65と第1巻取部64により確実に巻き回される。
以上述べたように、本発明によればケーブルは弛むことなく、常に巻き回部に巻きつけられるので、手首の回動に伴ってケーブルに局部的な折れ曲がりや捩じれが生ずることはない。また、アームの関節部における断線あるいは折れ曲がりを確実に防止した状態でケーブルをアーム内部に収容できるので、手首のスムーズな回動を確実にすることができる水平多関節ロボットを得ることができる。
12 第2アーム
13 第2アームベース
14 ケーシング
15 手首回転軸
15a 外側軸
15b 中心軸
16 胴体
17 第1アームベース
18 手首部
18a 下側手首
18b 上側手首
21 モータ(手首駆動用)
21a モータ(下側)
21b モータ(上側)
22 減速機
22a 減速機(下側)
22b 減速機(上側)
31、32a、32b、33a、33b、34、35 プーリ
36、37、38 タイミングベルト
41 手首用ケーブル
41a 手首用ケーブル(下側)
41b 手首用ケーブル(上側)
51、52、53、54、55 軸受
61、62 ケーブル保護パイプ
63 支持部材
64 第1巻取部
65 第2巻取部
A 中心線
Claims (3)
- 本体に関節を介して設けた第1アームと、前記第1アームに関節を介して設けた第2アームと、前記第2アームの先端部に設けられた上側と下側の二つの手首からなる手首部と、前記二つの手首を駆動する手首回転軸と、前記第2アームに設けられ前記手首部を駆動する手首駆動用のモータと、前記第2アームに設けられ前記手首部のうち上側の手首に挿通されるエア配管あるいは電気配線等のケーブルを巻き取る巻取部とを有する水平多関節ロボットにおいて、
前記ケーブルの巻取部は、前記手首回転軸に設けた第1巻取部と、前記第1巻取部の水平位置に回転可能に設けられたプーリを有しかつタイミングベルトで連結された第2巻取部とを有し、前記第1巻取部の回転に連動して前記第2巻取部を回動することを特徴とする水平多関節ロボット。 - 前記第2巻取部は、前記第2アームに軸受を有する支持部材を設けたことを特徴とする請求項1記載の水平多関節ロボット。
- 前記第2巻取部のプーリの軸は、ケーブルを挿通しかつ保護するパイプになっていることを特徴とする請求項1記載の水平多関節ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006063936A JP2007237342A (ja) | 2006-03-09 | 2006-03-09 | 水平多関節ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006063936A JP2007237342A (ja) | 2006-03-09 | 2006-03-09 | 水平多関節ロボット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007237342A true JP2007237342A (ja) | 2007-09-20 |
Family
ID=38583367
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006063936A Pending JP2007237342A (ja) | 2006-03-09 | 2006-03-09 | 水平多関節ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007237342A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010073568A1 (ja) * | 2008-12-24 | 2010-07-01 | セイコーエプソン株式会社 | 水平多関節型ロボット |
| JP2010247250A (ja) * | 2009-04-13 | 2010-11-04 | Yaskawa Electric Corp | 多関節ロボット |
| CN102962849A (zh) * | 2011-08-31 | 2013-03-13 | 株式会社安川电机 | 机器人的臂结构和机器人 |
| CN103331750A (zh) * | 2013-06-26 | 2013-10-02 | 中国科学院合肥物质科学研究院 | 一种大行程多节回转式机械臂的行走驱动装置 |
| US8668428B2 (en) | 2010-04-21 | 2014-03-11 | Kabushiki Kaisha Yaskawa Denki | Horizontal articulated robot and substrate transfer system provided with the same |
| EP2756932A2 (en) | 2013-01-17 | 2014-07-23 | Kabushiki Kaisha Yaskawa Denki | Robot |
| JP2014233772A (ja) * | 2013-05-31 | 2014-12-15 | シンフォニアテクノロジー株式会社 | 多関節ロボット |
| US11077549B2 (en) | 2017-11-06 | 2021-08-03 | Seiko Epson Corporation | Robot and robot system |
| CN116985176A (zh) * | 2023-05-29 | 2023-11-03 | 深圳康诺思腾科技有限公司 | 旋转关节及机械臂机构 |
| US12023804B2 (en) | 2021-11-26 | 2024-07-02 | Seiko Epson Corporation | Robot arm and robot system |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62213992A (ja) * | 1986-03-15 | 1987-09-19 | フアナツク株式会社 | 産業用ロボツトのケ−ブル処理装置 |
| JPH04305956A (ja) * | 1991-04-02 | 1992-10-28 | Tokyo Electron Ltd | 搬送アーム |
| JPH0857792A (ja) * | 1994-08-18 | 1996-03-05 | Meikikou:Kk | 水平多関節ロボットにおけるケーブルの処理方法 |
| JP2005246532A (ja) * | 2004-03-03 | 2005-09-15 | Yaskawa Electric Corp | ロボットのケーブル処理機構 |
-
2006
- 2006-03-09 JP JP2006063936A patent/JP2007237342A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62213992A (ja) * | 1986-03-15 | 1987-09-19 | フアナツク株式会社 | 産業用ロボツトのケ−ブル処理装置 |
| JPH04305956A (ja) * | 1991-04-02 | 1992-10-28 | Tokyo Electron Ltd | 搬送アーム |
| JPH0857792A (ja) * | 1994-08-18 | 1996-03-05 | Meikikou:Kk | 水平多関節ロボットにおけるケーブルの処理方法 |
| JP2005246532A (ja) * | 2004-03-03 | 2005-09-15 | Yaskawa Electric Corp | ロボットのケーブル処理機構 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010073568A1 (ja) * | 2008-12-24 | 2010-07-01 | セイコーエプソン株式会社 | 水平多関節型ロボット |
| JP2010149214A (ja) * | 2008-12-24 | 2010-07-08 | Seiko Epson Corp | 水平多関節型ロボット |
| JP2010247250A (ja) * | 2009-04-13 | 2010-11-04 | Yaskawa Electric Corp | 多関節ロボット |
| US8668428B2 (en) | 2010-04-21 | 2014-03-11 | Kabushiki Kaisha Yaskawa Denki | Horizontal articulated robot and substrate transfer system provided with the same |
| CN102962849A (zh) * | 2011-08-31 | 2013-03-13 | 株式会社安川电机 | 机器人的臂结构和机器人 |
| EP2756932A2 (en) | 2013-01-17 | 2014-07-23 | Kabushiki Kaisha Yaskawa Denki | Robot |
| JP2014233772A (ja) * | 2013-05-31 | 2014-12-15 | シンフォニアテクノロジー株式会社 | 多関節ロボット |
| CN103331750A (zh) * | 2013-06-26 | 2013-10-02 | 中国科学院合肥物质科学研究院 | 一种大行程多节回转式机械臂的行走驱动装置 |
| US11077549B2 (en) | 2017-11-06 | 2021-08-03 | Seiko Epson Corporation | Robot and robot system |
| US12023804B2 (en) | 2021-11-26 | 2024-07-02 | Seiko Epson Corporation | Robot arm and robot system |
| CN116985176A (zh) * | 2023-05-29 | 2023-11-03 | 深圳康诺思腾科技有限公司 | 旋转关节及机械臂机构 |
| CN116985176B (zh) * | 2023-05-29 | 2025-10-14 | 深圳康诺思腾科技有限公司 | 旋转关节及机械臂机构 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4258842B2 (ja) | ロボットのケーブル処理機構およびロボット | |
| US8881617B2 (en) | Robot arm with cable protection structure | |
| JP5159994B1 (ja) | ロボット関節構造 | |
| US8590415B2 (en) | Robotic arm assembly | |
| US7597025B2 (en) | Articulated robot | |
| US20110314949A1 (en) | Robot | |
| JP4315720B2 (ja) | ロボット等の関節部のケーブルガイド | |
| JPH10175188A (ja) | ロボットの構造 | |
| JP2005144610A (ja) | センサケーブル配線処理構造 | |
| JP2007237342A (ja) | 水平多関節ロボット | |
| CN104440937B (zh) | 工业机器人 | |
| WO2017169576A1 (ja) | ロボット | |
| JP2007229874A (ja) | 産業用ロボット | |
| CN100482426C (zh) | 工业机器人 | |
| JP3929383B2 (ja) | 産業用ロボットのカメラ及び力センサケーブル処理構造 | |
| JPH09141592A (ja) | 産業用垂直多関節型ロボット | |
| JP2004090135A (ja) | ロボットの関節部構造 | |
| JP4270041B2 (ja) | ロボットの手首装置とこれを備えたロボット | |
| JP2006007355A5 (ja) | ||
| CN201881385U (zh) | 连接装置、紧固设备和工业机器人 | |
| JP5381265B2 (ja) | 多関節ロボット | |
| JPH10175189A (ja) | 垂直多関節型ロボットの手首構造 | |
| JP4861760B2 (ja) | 旋回部の配線又は配管機構 | |
| JP2005066718A (ja) | 多関節ロボット | |
| JP2575499Y2 (ja) | 関節型ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081209 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20101025 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101028 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101117 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110516 |