JP2007230001A - オペレータ操作に応じたガイダンスを提示する画像処理システム - Google Patents
オペレータ操作に応じたガイダンスを提示する画像処理システム Download PDFInfo
- Publication number
- JP2007230001A JP2007230001A JP2006052151A JP2006052151A JP2007230001A JP 2007230001 A JP2007230001 A JP 2007230001A JP 2006052151 A JP2006052151 A JP 2006052151A JP 2006052151 A JP2006052151 A JP 2006052151A JP 2007230001 A JP2007230001 A JP 2007230001A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- absence
- guidance
- needle
- jam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012545 processing Methods 0.000 title claims abstract description 65
- 230000008859 change Effects 0.000 claims abstract description 29
- 230000002159 abnormal effect Effects 0.000 claims abstract description 20
- 238000003672 processing method Methods 0.000 claims abstract description 5
- 238000001514 detection method Methods 0.000 claims description 80
- 230000033001 locomotion Effects 0.000 abstract description 6
- 238000000034 method Methods 0.000 description 28
- 230000008569 process Effects 0.000 description 28
- 230000005856 abnormality Effects 0.000 description 20
- 238000012805 post-processing Methods 0.000 description 20
- 238000010586 diagram Methods 0.000 description 17
- 238000012790 confirmation Methods 0.000 description 6
- 230000009471 action Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 238000012546 transfer Methods 0.000 description 2
- 230000007175 bidirectional communication Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000009291 secondary effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
Images













Landscapes
- Paper Feeding For Electrophotography (AREA)
- Control Or Security For Electrophotography (AREA)
- Controlling Sheets Or Webs (AREA)
- Digital Computer Display Output (AREA)
- Accessory Devices And Overall Control Thereof (AREA)
Abstract
【解決手段】動作に関する異常事態の発生を検知する第1のセンサと、その画像処理システムのメカニカルな変化を検知する第2のセンサと、オペレータへ提示する提示手段と、これに各センサからの信号に基づいて異常事態の発生の通知を含むあらかじめ設定された複数のガイダンスから選択したガイダンスを出力する情報出力手段とを備え、当該手段は、第1のセンサからの信号に基づいて異常状態が発生したことを決定し、この発生の通知を含むこの処理方法に関する第1のガイダンスを提示し、この後に、第1のセンサあるいは第2のセンサからの信号が変化したことを検知した場合、その変化に関連付けられたオペレータ操作に一部基づいて、変化したセンサとその変化状態に応じてあらかじめ設定されているガイダンスを提示する。
【選択図】図4
Description
画像処理装置としては、いわゆる複写機、プリンタ、ファクシミリ、MFP等が考えられるが、本発明を、プリンタを例にとって説明する。
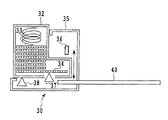
第2の実施形態は、第1の実施形態の構成に対して、ステープラ30に針カートリッジ有無センサ38が追加されている場合である。図5は、針なしセンサ37および針カートリッジ有無センサ38がステープラ30内に実装されていることを示す図である。針カートリッジ有無センサ38は、針カートリッジはステープラ30に装着されているか、外されているかを検知する。
この再確認において、カートリッジ内に針がないことを検出すると、再度、カートリッジを交換するように、たとえば「針カートリッジ内には針がありません。針カートリッジを取り外して下さい」のガイダンス表示をする(S209)。
第3の実施形態は、第1の実施形態の構成に対して、さらにステープル30に針ジャム・センサ39が追加されている場合である。図7は、針なしセンサ37および針ジャム・センサ39がステープラ30内に実装されていることを示す図である。針ジャム・センサ39は、いわゆる狭義のセンサではなく、ハンマ36の動作状況を狭義のセンサからの信号を利用して監視して針ジャムを表す信号を出力する広義のセンサである。これは、ハンマ36が正常に動作している限り、何も出力せず、正常に動作しないことを検知することにより針ジャムの発生を検知して出力する。
実施形態4は、第3の実施形態の構成に対して、さらに針カートリッジ有無センサ38が追加されている場合である。図9は、針なしセンサ37、針カートリッジ有無センサ38および針ジャム・センサ39がステープラ30に実装されていることを示す図である。
図10実施形態4、なわち、後処理装置21内のステープラ30に関して発生するエラーとして、針の有無、針カートリッジの有無、および針ジャムの検知を想定した場合の、エラー処理ためのガイダンスの表示のフローチャートである。なお、第1の実施形態の図4および第3の実施形態の図8と同様部分は、同じ番号で示し、説明を省略する。
交換されたカートリッジ内に針があることが確認した場合、S308を実行する。
第5の実施形態においては、第4の実施形態の構成に対して、搬送異常とユーザーのジャム処理状況のどちらも検知できるようにしたジャム検知フラグ47が追加されている。
第6の実施形態は、第5の実施形態の構成に対して、オペレータによるドアの開閉状態を検知するためのドア・センサ49(状態変化検知手段)が追加されている場合である。図16に示すように、ドアの開閉をドア・センサ49にて検知しユーザーのオペレーションを検知する。図17は、第6の実施形態、すなわち、後処理装置21に関して発生するエラーとして、図示したジャム検知フラグ47による搬送異常を想定した場合の、エラー処理のためのガイダンスの表示のフローチャートである。第5の実施形態の構成に対して、このエラーに関連したドアの開閉を検知するドア・センサの状態を検知する処理となっている。第1の実施形態の図4および第5の実施形態の図15と同様部分は、同じ番号で示し、説明を省略する。
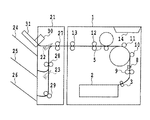
2 カセット
3、9、10、11、12、13、27 ローラ
4 感光体ドラム
5 定着器
8 レジストレーション・センサ
14 オペレーション・パネル(表示装置)
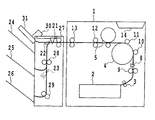
21 後処理装置(ソータ)
24、25、26 トレイ
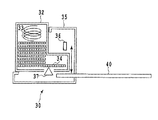
30 ステープラ
31 ジョガー
32 針カートリッジ
34 ステープル針
35 ステープラ本体
36 ハンマ
37 針なしセンサ
38 針カートリッジ有無センサ
39 針ジャム・センサ
40 シート
45 ジャム処理ドア
47 ジャム検知フラグ
48 検知フォト・センサ
49 ドア・センサ
Claims (7)
- 画像処理装置システムであって、
動作に関する異常事態の発生を検知する第1のセンサと、
前記異常事態の処理をオペレータが実行する際にその画像処理システムのメカニカルな変化を検知する第2のセンサと、
オペレータへ情報を提示する提示手段と、
前記提示手段に、前記各センサからの信号に基づいてあらかじめ設定されているガイダンスを出力する情報出力手段と
を備え、
前記情報出力手段は、
前記第1のセンサからの信号に基づいて異常状態が発生したことを決定し、前記異常状態の発生の通知を含む第1のガイダンスを出力し、
前記提示手段によって前記第1のガイダンスを提示した後に、前記第1のセンサあるいは前記第2のセンサからの信号が変化したことを検知した場合、変化したセンサとその変化状態に応じてあらかじめ設定されているガイダンスを提示することを特徴とする画像処理システム。 - 前記提示手段は、表示装置であり、
前記情報出力手段は、
前記第1のガイダンスの提示後、前記第1のセンサあるいは前記第2のセンサからの信号が変化したことを検知した場合、その変化した結果が各センサからの信号が正常な状態になったことを示した場合には、前記表示装置への出力を停止する
ことを特徴とする請求項1に記載の画像処理システム。 - 前記第1のセンサは、ステープラの針有無を検知する針なしセンサを含み、
前記第2のセンサは、針カートリッジの有無を検知する針カートリッジ有無センサを含む
ことを特徴とする請求項1に記載の画像処理システム。 - 前記第1のセンサは、ステープラの針有無を検知する針なしセンサを含み、
前記第2のセンサは、針カートリッジの有無を検知する針カートリッジ有無センサを含み、
前記情報出力手段は、
前記針カートリッジ有無センサからの信号が無を表していることを検知した場合、針なしの発生の通知を含むこの処理方法に関するオペレータへの前記第1のガイダンスを出力し、
前記針カートリッジ有無センサからの信号が、無から有になったことを検知した場合に、前記針なしセンサの信号に応じて異なるガイダンスを出力する
ことを特徴とする請求項1に記載の画像処理システム。 - 前記第1のセンサは、ステープラの針の有無を検知する針なしセンサと、針JAMを検知するセンサを含み、
前記第2のセンサは、針カートリッジの有無を検知する針カートリッジ有無センサを含む
ことを特徴とする請求項1のいずれかに記載の画像処理システム。 - 前記第1のセンサは、ステープラの針の有無を検知する針なしセンサと、針JAMを検知する針ジャム・センサを含み、
前記第2のセンサは、針カートリッジの有無を検知するセンサを含み、
前記情報出力手段は、
前記針カートリッジ有無センサからの信号が無を表していること、あるいは針ジャム・センサからの信号が針ジャムを表していることを検知した場合、針なし、あるいは針ジャムの発生の通知を含む前記第1のガイダンスを出力し、
前記針カートリッジ有無センサからの信号が、無から有になったことを検知した場合に、前記針なしセンサの信号に応じて異なるガイダンスを出力する
ことを特徴とする請求項1に記載の画像処理システム。 - 前記第1のセンサは、シートのジャムを検知するためにシート搬送路上のシートの有無を検知するシート有無検知センサを含み、当該シート有無検知センサは、オペレータがジャム処理のためにドアを開けた状態でもジャムとなったシートの有無を出力可能であり、
前記情報出力手段は、
前記シート有無検知センサからの信号によりジャムの発生を検知した場合、当該ジャムの発生の通知を含む第1のガイダンスを出力し、
前記シート有無検知センサからの信号が、シートの有から無になったことを検知した場合に、ジャムしたシートが取り除かれたと判定して、その際の各センサからの信号に基づいて決定されるガイダンスを出力する
ことを特徴とする請求項1に記載の画像処理システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006052151A JP2007230001A (ja) | 2006-02-28 | 2006-02-28 | オペレータ操作に応じたガイダンスを提示する画像処理システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006052151A JP2007230001A (ja) | 2006-02-28 | 2006-02-28 | オペレータ操作に応じたガイダンスを提示する画像処理システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007230001A true JP2007230001A (ja) | 2007-09-13 |
| JP2007230001A5 JP2007230001A5 (ja) | 2009-04-16 |
Family
ID=38551080
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006052151A Pending JP2007230001A (ja) | 2006-02-28 | 2006-02-28 | オペレータ操作に応じたガイダンスを提示する画像処理システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007230001A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100231390A1 (en) * | 2009-03-13 | 2010-09-16 | Canon Kabushiki Kaisha | Image processing apparatus |
| JP2011123415A (ja) * | 2009-12-14 | 2011-06-23 | Ricoh Co Ltd | 用紙処理装置、画像形成システム、用紙搬送異常検出方法、及び用紙搬送異常検出制御プログラム |
| US8960672B2 (en) | 2012-12-27 | 2015-02-24 | Ricoh Company | Sheet feeder control method, sheet feeder, and image forming apparatus |
| US20190317701A1 (en) * | 2018-04-16 | 2019-10-17 | Konica Minolta Inc. | Image forming apparatus, method of controlling image forming apparatus, and program |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6116309A (ja) * | 1984-07-03 | 1986-01-24 | Ricoh Co Ltd | 装置操作のガイダンス装置 |
-
2006
- 2006-02-28 JP JP2006052151A patent/JP2007230001A/ja active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6116309A (ja) * | 1984-07-03 | 1986-01-24 | Ricoh Co Ltd | 装置操作のガイダンス装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100231390A1 (en) * | 2009-03-13 | 2010-09-16 | Canon Kabushiki Kaisha | Image processing apparatus |
| US9235178B2 (en) * | 2009-03-13 | 2016-01-12 | Canon Kabushiki Kaisha | Image processing apparatus |
| JP2011123415A (ja) * | 2009-12-14 | 2011-06-23 | Ricoh Co Ltd | 用紙処理装置、画像形成システム、用紙搬送異常検出方法、及び用紙搬送異常検出制御プログラム |
| US8960672B2 (en) | 2012-12-27 | 2015-02-24 | Ricoh Company | Sheet feeder control method, sheet feeder, and image forming apparatus |
| US9695002B2 (en) | 2012-12-27 | 2017-07-04 | Ricoh Company, Ltd. | Sheet feeder control method, sheet feeder, and image forming apparatus |
| US20190317701A1 (en) * | 2018-04-16 | 2019-10-17 | Konica Minolta Inc. | Image forming apparatus, method of controlling image forming apparatus, and program |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10126695B2 (en) | Image forming apparatus that is improved in jam processing efficiency | |
| JP4561956B2 (ja) | 画像形成システム | |
| US9511973B2 (en) | Sheet stacking apparatus having tray that is lifted and lowered and image forming apparatus | |
| US20140079411A1 (en) | Image forming system | |
| JP2007230001A (ja) | オペレータ操作に応じたガイダンスを提示する画像処理システム | |
| JP4546059B2 (ja) | 画像形成装置 | |
| JP4891056B2 (ja) | 情報表示装置及び画像形成装置 | |
| JP2018118832A (ja) | 画像形成システム、ジョブ実行方法、およびジョブ実行プログラム | |
| US6449440B1 (en) | Image forming system having job recovery depending on number of sheets in ejection tray | |
| JP2009044476A (ja) | 画像形成システムおよび画像形成装置 | |
| JP2008262103A (ja) | 印刷装置の制御装置、印刷システム、および印刷装置の制御プログラム | |
| JP4770339B2 (ja) | 印刷物蓄積装置 | |
| JP2006306547A (ja) | シート搬送不良解除機構およびシート積載装置 | |
| JP2008167170A (ja) | 画像形成装置 | |
| JP2019052046A (ja) | 画像形成装置 | |
| JP4938487B2 (ja) | 画像形成システム | |
| JP5353440B2 (ja) | 後処理装置、及び画像形成システム | |
| JP2009190803A (ja) | 画像形成装置の用紙搬送装置、用紙搬送方法および用紙搬送プログラム | |
| US9868603B2 (en) | Sheet processing apparatus and image forming system | |
| JP5080131B2 (ja) | 画像形成装置、画像形成装置の制御方法、画像形成装置の制御プログラム及び記録媒体 | |
| JP7225934B2 (ja) | 画像形成装置 | |
| JP5212564B2 (ja) | 画像形成装置、画像形成装置の制御方法、画像形成装置の制御プログラム及び記録媒体 | |
| US11448993B2 (en) | Image forming system, sheet processing device, and control method of sheet processing device | |
| US10752462B2 (en) | Sheet processing device and image forming apparatus | |
| JP2011020277A (ja) | 画像形成装置及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090226 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090226 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20101106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110114 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110916 |