JP2005297814A - 車両用走行制御装置 - Google Patents
車両用走行制御装置 Download PDFInfo
- Publication number
- JP2005297814A JP2005297814A JP2004118119A JP2004118119A JP2005297814A JP 2005297814 A JP2005297814 A JP 2005297814A JP 2004118119 A JP2004118119 A JP 2004118119A JP 2004118119 A JP2004118119 A JP 2004118119A JP 2005297814 A JP2005297814 A JP 2005297814A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- deceleration
- speed
- shift
- gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Transmission Device (AREA)
Abstract
【解決手段】車両の変速機10を相対的に低速用の変速段又は変速比に変速制御することで、前記車両の前方の先行車との距離を適正に制御する車両用走行制御装置であって、前記先行車の減速度を検出又は推定する先行車減速度検出/推定部と、前記先行車の減速度に基づいて、前記変速制御の際の前記変速機の前記変速段又は変速比を選択する変速段/変速比選択部とを備えている。例えば車間距離や相対車速のような先行車との関係が所定の目標に到達した時点又は以降に、変速制御後の変速段又変速比によるエンジンブレーキ力のみで先行車に対する追従走行が実現されるためには、先行車の減速度に基づいて、変速制御の際の変速段又変速比が決められることが好ましい。
【選択図】 図1
Description
図1から図13を参照して、第1実施形態について説明する。本実施形態は、自動変速機の変速段又は変速比を制御して減速制御を行う車両用走行制御装置に関する。
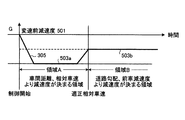
走行道路が平坦路である場合には、車間距離又は相対車速が適正な値になった後に、前方車両が定常運転又は加速すると、自車は、アクセルをONにして前方車両に対する追従走行を行うと予想される。アクセルがONにされると、車間距離情報に基づく減速制御の実施が停止され、通常一般の変速マップに従う変速に復帰するため、第2変速後減速度503bの選択に際して、特別な配慮は不要である。一方、前方車両が減速すると、その前方車両の車速に合わせるべく、自車は、アクセルをOFFのままブレーキをONにすると思われる。そのため、前方車両が減速した場合には、第2変速後減速度503bの設定に関して特に配慮する必要がある。
走行道路が降坂路である場合には、車間距離又は相対車速が適正な値になった後に、前方車両が定常運転すると、自車は、アクセルをOFFにして前方車両に対する追従走行を行うと予想される。また、前方車両が加速すると、自車は、アクセルをOFF又はアクセルをONにして前方車両に対する追従走行を行うと予想される。また、前方車両が減速すると、その前方車両の車速に合わせるべく、自車は、アクセルをOFFのままブレーキをONにすると思われる。以上のことから、前方車両が定常運転、加速又は減速した場合には、第2変速後減速度503bの設定に関して特に配慮する必要がある。
走行道路が登坂路である場合には、車間距離又は相対車速が適正な値になった後に、前方車両が定常運転又は加速すると、自車は、アクセルをONにして前方車両に対する追従走行を行うと予想される。アクセルがONにされると、車間距離情報に基づく減速制御の実施が停止され、通常一般の変速マップに従う変速に復帰するため、変速後減速度503の選択に際して、特別な配慮は不要である。一方、前方車両が減速すると、その前方車両の車速に合わせるべく、自車は、アクセルをOFFのままブレーキをONにすると思われる。そのため、前方車両が減速した場合には、第2変速後減速度503bの設定に関して特に配慮する必要がある。
まず、図1のステップS1に示すように、制御回路130では、車間距離計測部100から入力した車間距離を示す信号に基づいて、自車と前方の車両との車間距離が所定値以下であるか否かを判定する。ステップS1の結果、車間距離が所定値以下であると判定されれば、ステップS2に進む。一方、車間距離が所定値以下であると判定されなければ、本制御フローは終了する。
ステップS2では、制御回路130により、スロットル開度センサ114からの信号に基づいて、アクセルがOFFの状態か否かが判定される。ステップS2では、運転者による減速意図が確認される。ステップS2の結果、アクセルがOFFの状態であると判定されれば、ステップS3に進む。ステップS3から車両の追従制御が開始される。一方、アクセルがOFFの状態であると判定されなければ、本制御フローは終了する。
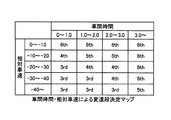
ステップS3では、制御回路130により、車間時間及び相対車速に基づいて、変速制御によるダウンシフト先としての変速段が決定される。ステップS3において、変速段は、予めROM133に記憶された、車間時間・相対車速による変速段決定マップ(図3)を参照して求められる。図3に示すように、変速段は、自車と前方車両との相対車速[km/h]と車間時間[sec]に基づいて求められる。
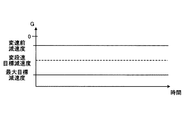
変速段目標減速度は、自動変速機10の変速制御により得ようとするエンジンブレーキ力(減速加速度)に対応したものである。変速段目標減速度は、後述する最大目標減速度以下の値として設定される。変速段目標減速度の求め方としては、以下の3つの方法が考えられる。
変速段目標減速度は、図4の目標減速度マップにより求めた最大目標減速度に、0よりも大きく1以下の係数を乗算した値として設定する。
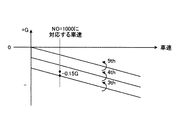
予めROM133に、変速段目標減速度マップ(図5)が登録されている。図5の変速段目標減速度マップが参照されて、変速段目標減速度が求められる。図5に示すように、変速段目標減速度は、図4の目標減速度と同様に、自車と前方車両との相対車速[km/h]と車間時間[sec]に基づいて求められる。例えば、上記例の場合と同様に、相対車速が−40[km/h]であって、車間時間が1.0[sec]である場合には、−0.15Gが変速段目標減速度として求められる。図4及び図5から明らかなように、相対車速が大きく急激に接近する場合、車間時間が短い場合、あるいは車間距離が短い場合は、早期に車間距離を適正な状態にする必要があるため、減速度をより大きくする必要がある。また、このことから、上記の状況ではより低速段が選択されることになる。
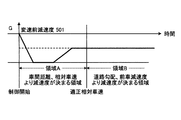
まず、本制御開始前の自動変速機10の現状のギヤ段のアクセルOFF時のエンジンブレーキ力(減速G)を求める(以下、変速前減速度501と称する)。予めROM133に各ギヤ段減速度マップ(図6)が登録されている。図6の各ギヤ段減速度マップが参照されて、変速前減速度501が求められる。図6に示すように、変速前減速度501は、ギヤ段と自動変速機10の出力軸120cの回転数NOに基づいて求められる。例えば、現状ギヤ段が5速で出力回転数が1000[rpm]であるときには、変速前減速度501は−0.04Gである。なお、図10の例では、現状ギヤ段は、5速として示されている。
変速段目標減速度=(最大目標減速度−変速前減速度501)×係数+変速前減速度501
上記式において、係数は0より大きく1以下の値である。
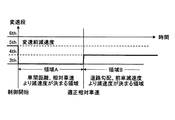
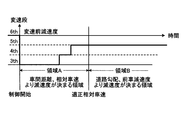
ステップS4では、制御回路130により、変速制御が開始される。即ち、ステップS3で決定された選択すべきギヤ段(ステップS3の上記例では、3速)に変速制御される。それに伴い、エンジンブレーキ力が増加する。ステップS4の次に、ステップS5が実行される。図10の例では、制御開始前のギヤ段が5速であり、制御が開始されると、上記ステップS3において車間時間、相対車速に基づいて決定された、3速の変速段に変速制御される。
ステップS5では、制御回路130により、相対車速が予め設定された所定値より小さいか否かが判定される。ステップS5の判定の結果、相対車速が所定値よりも小さければ、ステップS6に進み、そうでなければ、相対車速が所定値より小さくなるまでステップS5が繰り返し行われる。ステップS5において、相対車速が所定値よりも小さいと判定されると、図10において、相対車速が適正値であると判定された後の領域Bに入る。
ステップS6では、制御回路130の道路勾配計測・推定部118により、自車が走行する道路の勾配が求められる。ROM133には、上述したように、図6に示すような各ギヤ段でのアクセル全閉時の減速度が記述された各ギヤ段減速度マップが格納されている。図6に示すように、そのマップには、平坦路における各ギヤ段の車速毎の減速度が記述されている。道路勾配計測・推定部118は、予めROM133にマップとして記憶された平坦路での加速度と、実際に加速度センサ90により検出した加速度とを比較して、実加速度がマップの加速度よりも大きい場合には降坂路であり、実加速度がマップの加速度よりも小さい場合には登坂路である。この場合、実加速度とマップの加速度の偏差0.01G≒道路勾配1%に対応する。
ステップS7では、制御回路130により、前方車両の加速度が求められる。前方車両と自車との車間距離を2回微分することにより相対加速度が求められ、その相対加速度と自車の加速度との差をとることで、前方車両の加速度が求められる。本例では、例えば前方車両の減速度は、−0.082Gであるとする。ステップS7の次には、ステップS8が行われる。
ステップS8では、制御回路130により、上記ステップS6及びステップS7の演算結果に基づいて、自車が走行している道路が降坂路であるか否か、又は前方車両が減速状態にあるか否かが判定される。その判定の結果、自車が走行している道路が降坂路又は前方車両が減速状態である場合には、ステップS9に進み、そうでない場合にはステップS12に進む。
ステップS9では、制御回路130により、上記ステップS6の演算結果に基づいて、各変速段の道路勾配を考慮した減速度が算出される。ステップS9では、ステップS6にて求められた道路勾配分だけ図6のマップに記述された各減速度の値を補正する。その補正に際して、上記ステップS6において求められた道路勾配1%=0.01Gで近似することができ、登坂路では正の値、降坂路では負の値として加算される。
ステップS10では、制御回路130により、相対車速が適正になった後の変速制御によるダウンシフト先として、最適な変速段が選択される。その選択された変速段による減速度が第2変速後減速度503bである(図9)。ここで、選択される最適な変速段とは、“上記ステップS9で求められた道路勾配が考慮された変速段の減速度が、上記ステップS7にて求められた前方車両の減速度以上の変速段である”という条件を満たす変速段のうち、一番低速段である。
ステップS11では、制御回路130により、変速制御が行われる。即ち、ステップS10で決定された選択すべきギヤ段(ステップS10の上記例では、4速)に変速制御される。それに伴い、エンジンブレーキ力が減少する。本実施形態によれば、相対車速が適正値になった後も、道路勾配、前車減速度より決定される変速段に変速制御されるため、従来技術のように、降坂路などにおいて制御ハンチングが発生することが最小限に抑制される。ステップS11の次に、ステップS12が実行される。
ステップS12では、制御回路130により、アクセルがONにされ、そのアクセルのONに応答してスタートした復帰タイマーカウント値が所定値以上であるか否かが判定される。カウント値が所定値以上でなければ、ステップS12に戻る。カウント値が所定値以上になれば、ステップS13に進む。
ステップS13では、制御回路130による、変速制御(ダウンシフト制御)が終了し、予めROM133に格納された通常の変速マップ(変速線)に従いアクセル開度と車速に基づき決定される変速段に復帰する。ステップS13が実施されると、本制御フローは終了する。
車間距離情報に基づいて、ダウンシフトにより減速制御を行う場合、目標の車間距離や車速になるような目標変速段を設定する。この目標変速段への変速制御により、相対車速が適正値になる。
次に、図14を参照して、第2実施形態について説明する。
第2実施形態では、上記第1実施形態との相違点についてのみ説明する。
図14に示すように、車間距離が所定値以下である場合(ステップSA1−Y)に、制御回路130により、運転者によってフットブレーキがONにされたか否かが判定される。ブレーキがONにされた場合には、ステップSA3に進み、そうでない場合には、本制御フローはリターンされる。
制御回路130により、運転者によってフットブレーキがOFFにされたか否かが判定される。ステップSA3の判定の結果、フットブレーキがOFFにされたと判定されない場合には、そのように判定されるまでステップSA3が繰り返し行われる。
ステップSA7では、図1のステップS2と同様に、運転者による減速意図が確認される。
ステップSA11では、制御回路130により、ステップSA10で決定された変速段への変速制御が実行される。相対車速が適正値になった後(ステップSA4−Y)に、自動変速機10が道路勾配、前車減速度に基づいて決定された変速段に変速制御される点(ステップSA8〜ステップSA11)は、上記第1実施形態と共通である。
次に、図15を参照して、第3実施形態について説明する。
第3実施形態において、上記実施形態と共通する部分についての説明は省略する。
40 エンジン
90 加速度センサ
100 車間距離計測部
114 スロットル開度センサ
115 路面μ検出・推定部
116 エンジン回転数センサ
118 道路勾配計測・推定部
122 車速センサ
123 シフトポジションセンサ
130 制御回路
131 CPU
133 ROM
305 目標減速度
501 変速前減速度
503a 第1変速後減速度
503b 第2変速後減速度
Claims (6)
- 車両の変速機を相対的に低速用の変速段又は変速比に変速制御することで、前記車両の前方の先行車との距離を適正に制御する車両用走行制御装置であって、
前記先行車の減速度を検出又は推定する先行車減速度検出/推定部と、
前記先行車の減速度に基づいて、前記変速制御の際の前記変速機の前記変速段又は変速比を選択する変速段/変速比選択部と
を備えたことを特徴とする車両用走行制御装置。 - 請求項1記載の車両用走行制御装置において、
前記先行車が減速状態ではないときには、前記変速段/変速比選択部は、前記先行車の減速度に基づく前記変速段又は変速比の選択を行わない
ことを特徴とする車両用走行制御装置。 - 請求項1または2に記載の車両用走行制御装置において、
更に、
前記車両が走行する道路の勾配を検出又は推定する道路勾配計測/推定部を備え、
前記変速段/変速比選択部は、前記先行車の減速度及び前記勾配に基づいて、前記変速制御の際の前記変速機の前記変速段又は変速比を選択する
ことを特徴とする車両用走行制御装置。 - 請求項3記載の車両用走行制御装置において、
前記道路が降坂路ではないときには、前記変速段/変速比選択部は、前記先行車の減速度及び前記勾配に基づく前記変速段又は変速比の選択を行わない
ことを特徴とする車両用走行制御装置。 - 請求項1から4のいずれか1項に記載の車両用走行制御装置において、
前記変速段/変速比選択部は、更に、前記先行車の減速度に基づく前記変速段又は変速比の選択を行う前に、前記距離に基づいて、前記変速制御の際の前記変速機の前記変速段又は変速比を選択する
ことを特徴とする車両用走行制御装置。 - 請求項5記載の車両用走行制御装置において、
前記変速段/変速比選択部は、前記先行車と前記車両の相対車速に基づいて、前記距離に基づく前記変速段又は変速比の選択から、前記先行車の減速度に基づく前記変速段又は変速比の選択に切り替える
ことを特徴とする車両用走行制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004118119A JP4214943B2 (ja) | 2004-04-13 | 2004-04-13 | 車両用走行制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004118119A JP4214943B2 (ja) | 2004-04-13 | 2004-04-13 | 車両用走行制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005297814A true JP2005297814A (ja) | 2005-10-27 |
| JP4214943B2 JP4214943B2 (ja) | 2009-01-28 |
Family
ID=35329879
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004118119A Expired - Fee Related JP4214943B2 (ja) | 2004-04-13 | 2004-04-13 | 車両用走行制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4214943B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016101783A1 (de) | 2015-02-27 | 2016-09-01 | Fujitsu Ten Limited | Fahrzeugsteuergerät, Fahrzeugsteuersystem und Fahrzeugsteuerverfahren |
| US9669808B2 (en) | 2011-01-21 | 2017-06-06 | Toyota Jidosha Kabushiki Kaisha | Vehicle engine brake control apparatus |
| JP2018179031A (ja) * | 2017-04-04 | 2018-11-15 | 株式会社デンソー | 制御装置 |
| KR20200141641A (ko) * | 2019-06-11 | 2020-12-21 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| KR20210146687A (ko) * | 2020-05-27 | 2021-12-06 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| US20220250620A1 (en) * | 2021-02-08 | 2022-08-11 | Ford Global Technologies, Llc | Adaptive cruise control with user-defined lateral acceleration threshold |
| JP2023092622A (ja) * | 2021-12-22 | 2023-07-04 | トヨタ自動車株式会社 | 車載制御装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0717298A (ja) * | 1993-07-06 | 1995-01-20 | Mazda Motor Corp | 自動車の走行制御装置 |
| JP2001287568A (ja) * | 2000-04-07 | 2001-10-16 | Denso Corp | 車間制御方法及び装置、車間警報方法及び装置、記録媒体 |
| JP2003054395A (ja) * | 2001-08-20 | 2003-02-26 | Honda Motor Co Ltd | 車両の減速制御装置 |
| JP2003211999A (ja) * | 2001-11-15 | 2003-07-30 | Denso Corp | 車両の走行制御装置 |
-
2004
- 2004-04-13 JP JP2004118119A patent/JP4214943B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0717298A (ja) * | 1993-07-06 | 1995-01-20 | Mazda Motor Corp | 自動車の走行制御装置 |
| JP2001287568A (ja) * | 2000-04-07 | 2001-10-16 | Denso Corp | 車間制御方法及び装置、車間警報方法及び装置、記録媒体 |
| JP2003054395A (ja) * | 2001-08-20 | 2003-02-26 | Honda Motor Co Ltd | 車両の減速制御装置 |
| JP2003211999A (ja) * | 2001-11-15 | 2003-07-30 | Denso Corp | 車両の走行制御装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9669808B2 (en) | 2011-01-21 | 2017-06-06 | Toyota Jidosha Kabushiki Kaisha | Vehicle engine brake control apparatus |
| DE102016101783A1 (de) | 2015-02-27 | 2016-09-01 | Fujitsu Ten Limited | Fahrzeugsteuergerät, Fahrzeugsteuersystem und Fahrzeugsteuerverfahren |
| JP2018179031A (ja) * | 2017-04-04 | 2018-11-15 | 株式会社デンソー | 制御装置 |
| KR20200141641A (ko) * | 2019-06-11 | 2020-12-21 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| KR102645059B1 (ko) | 2019-06-11 | 2024-03-08 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| KR20210146687A (ko) * | 2020-05-27 | 2021-12-06 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| KR102791263B1 (ko) | 2020-05-27 | 2025-04-08 | 현대자동차주식회사 | 차량의 변속 제어 장치 및 방법 |
| US20220250620A1 (en) * | 2021-02-08 | 2022-08-11 | Ford Global Technologies, Llc | Adaptive cruise control with user-defined lateral acceleration threshold |
| US11524679B2 (en) * | 2021-02-08 | 2022-12-13 | Ford Global Technologies, Llc | Adaptive cruise control with user-defined lateral acceleration threshold |
| US11820371B2 (en) | 2021-02-08 | 2023-11-21 | Ford Global Technologies, Llc | Adaptive cruise control with user-defined lateral acceleration threshold |
| JP2023092622A (ja) * | 2021-12-22 | 2023-07-04 | トヨタ自動車株式会社 | 車載制御装置 |
| JP7711584B2 (ja) | 2021-12-22 | 2025-07-23 | トヨタ自動車株式会社 | 車載制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4214943B2 (ja) | 2009-01-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005226670A (ja) | 車両の減速制御装置 | |
| JP2005164010A (ja) | 車両の減速制御装置 | |
| JP2005297611A (ja) | 車両の減速制御装置 | |
| KR19980087004A (ko) | 자동차의 자동 변속기 제어 장치 및 제어 방법 | |
| JP2008101742A (ja) | 車両の制御装置、制御方法、その制御方法をコンピュータで実現するプログラムおよびそのプログラムを記録した記録媒体 | |
| JP2008215443A (ja) | 変速制御装置 | |
| JP4434101B2 (ja) | 車両用駆動力制御装置 | |
| JP2006038078A (ja) | 車両の減速制御装置 | |
| JP4214943B2 (ja) | 車両用走行制御装置 | |
| JP2006071084A (ja) | 車両用駆動力制御装置 | |
| JP2007139090A (ja) | 車両用走行制御装置 | |
| JP2006015952A (ja) | 車両の減速制御装置 | |
| JP2006224882A (ja) | 車両の減速制御装置 | |
| JP2006137392A (ja) | 車両の減速制御装置 | |
| JP4517710B2 (ja) | 変速機の制御装置 | |
| JP2006002916A (ja) | 車両用走行制御装置 | |
| JP2006001323A (ja) | 車両の減速制御装置 | |
| JP2006213133A (ja) | 車両の減速制御装置 | |
| KR100850663B1 (ko) | 차량용 구동력 제어 장치와 제어 방법 | |
| JP2005308096A (ja) | 変速機の制御装置 | |
| JP4978254B2 (ja) | 車両用駆動力制御装置 | |
| JP2007146998A (ja) | 変速機の制御装置 | |
| JP2006151127A (ja) | 車両の減速制御装置 | |
| JP2006017227A (ja) | 車両用走行制御装置 | |
| JPH07305765A (ja) | 車両用自動変速機の変速制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060823 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080617 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080804 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081014 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081027 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4214943 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111114 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111114 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121114 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121114 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131114 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |