JP2005293032A - 車輌運転状況監視システム及びこのシステム用の車輌運転状況監視プログラム。 - Google Patents
車輌運転状況監視システム及びこのシステム用の車輌運転状況監視プログラム。 Download PDFInfo
- Publication number
- JP2005293032A JP2005293032A JP2004104874A JP2004104874A JP2005293032A JP 2005293032 A JP2005293032 A JP 2005293032A JP 2004104874 A JP2004104874 A JP 2004104874A JP 2004104874 A JP2004104874 A JP 2004104874A JP 2005293032 A JP2005293032 A JP 2005293032A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- driving
- data
- operation state
- abnormality
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012544 monitoring process Methods 0.000 title claims abstract description 29
- 230000005856 abnormality Effects 0.000 claims abstract description 33
- 206010039203 Road traffic accident Diseases 0.000 abstract description 4
- 238000010295 mobile communication Methods 0.000 abstract description 4
- 230000005540 biological transmission Effects 0.000 abstract description 2
- 230000001105 regulatory effect Effects 0.000 abstract 1
- 238000004891 communication Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 7
- 230000002123 temporal effect Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 206010041349 Somnolence Diseases 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000012806 monitoring device Methods 0.000 description 1
Images




Landscapes
- Traffic Control Systems (AREA)
Abstract
【課題】移動体通信を利用することにより車輌の運転中にリアルタイムでデータを送信してセンタシステム(サーバ)で解析を行い、危険運転が判明した場合に直ちに注意通知を発信することや警察に通報することにより、速度違反、居眠り運転や飲酒運転による交通事故を未然に防ぐ確率を高める車輌運転状況監視システムを提供することを課題とする。
【解決手段】ネットワークを通じて車輌側から所定時間毎に送信される車輌位置データ、運転状況データ及び時刻データを受信する運転状況データ受信手段と、前記運転状況データを解析し、運転状況における異常の有無を判定する運転状況解析手段と、前記運転状況解析手段によって運転状況の異常が判定されると、その異常内容をクライアント端末に送信する異常内容送信手段とを備える。
【選択図】図1
【解決手段】ネットワークを通じて車輌側から所定時間毎に送信される車輌位置データ、運転状況データ及び時刻データを受信する運転状況データ受信手段と、前記運転状況データを解析し、運転状況における異常の有無を判定する運転状況解析手段と、前記運転状況解析手段によって運転状況の異常が判定されると、その異常内容をクライアント端末に送信する異常内容送信手段とを備える。
【選択図】図1
Description
本発明は、移動体通信を利用して、車輌の運転状況を遠隔監視する車輌運転状況監視システムに関する。
図8は、従来の道路情報管理システムの構成を概略的に示す図である。
従来の道路情報管理システムとしては、例えば特許文献1記載のように、既存の多数の業務用車輌MS1〜MSnにそれぞれ撮像カメラを備えた移動監視装置を搭載し、撮像カメラにより撮像した道路映像をGPSを利用して検出した位置情報とともに移動通信網MNWを介して道路情報管理センタSCへ無線伝送する。そして、道路情報管理センタSCにおいて、上記撮像情報を解析して渋滞や交通規制、天候などの道路の状況を認識し、その認識結果を表す道路情報を位置情報を基に地図上にマッピングした上で記憶部に記憶する。そして、業務用車輌MS1〜MSnは勿論のこと、一般的な移動局ユーザPS1〜PSmや固定局ユーザHS1〜HSiから配信要求が到来した場合に、この要求に応じた道路情報を記憶装置から選択的に読み出して要求元へ配信するものがあった。
また、道路情報を車輌に配信するだけでなく、上述のようなGPSを利用した道路情報管理システムを用いて、車載センサで検出した車輌の運転状況をGPSデータと組み合わせて記録し、運転状況の管理を行う車輌運転状況監視システムもあった。
従来の道路情報管理システムとしては、例えば特許文献1記載のように、既存の多数の業務用車輌MS1〜MSnにそれぞれ撮像カメラを備えた移動監視装置を搭載し、撮像カメラにより撮像した道路映像をGPSを利用して検出した位置情報とともに移動通信網MNWを介して道路情報管理センタSCへ無線伝送する。そして、道路情報管理センタSCにおいて、上記撮像情報を解析して渋滞や交通規制、天候などの道路の状況を認識し、その認識結果を表す道路情報を位置情報を基に地図上にマッピングした上で記憶部に記憶する。そして、業務用車輌MS1〜MSnは勿論のこと、一般的な移動局ユーザPS1〜PSmや固定局ユーザHS1〜HSiから配信要求が到来した場合に、この要求に応じた道路情報を記憶装置から選択的に読み出して要求元へ配信するものがあった。
また、道路情報を車輌に配信するだけでなく、上述のようなGPSを利用した道路情報管理システムを用いて、車載センサで検出した車輌の運転状況をGPSデータと組み合わせて記録し、運転状況の管理を行う車輌運転状況監視システムもあった。
しかしながら、従来の道路情報管理システムは上述のように構成されていたため、次のような課題があった。
車載機で車輌センサのデータを集積しIC(Integrated Circuit)カードに保存、運転終了後に事務所のPC(Personal Computer)でICカードのデータを読み込み、PCの解析プログラム等でデータを解析するものであった。この技術では運転状況は解析できるが運転手が運転を終了した後であり、危険運転がわかっても運転後に注意することしかできなかった。
車載機で車輌センサのデータを集積しIC(Integrated Circuit)カードに保存、運転終了後に事務所のPC(Personal Computer)でICカードのデータを読み込み、PCの解析プログラム等でデータを解析するものであった。この技術では運転状況は解析できるが運転手が運転を終了した後であり、危険運転がわかっても運転後に注意することしかできなかった。
本発明は、上述のような課題を解決するためになされたものであり、移動体通信を利用することにより車輌の運転中にリアルタイムでデータを送信してセンタシステム(サーバ)で解析を行い、危険運転が判明した場合に直ちに注意通知を発信することや警察に通報することにより、速度違反、居眠り運転や飲酒運転による交通事故を未然に防ぐ確率を高める車輌運転状況監視システムを提供することを目的とする。
本発明の車輌運転状況監視システムは、ネットワークを通じて車輌側から所定時間毎に送信される車輌位置データ、運転状況データ及び時刻データを受信する運転状況データ受信手段と、前記運転状況データを解析し、運転状況における異常の有無を判定する運転状況解析手段と、前記運転状況解析手段によって運転状況の異常が判定されると、その異常内容をクライアント端末に送信する異常内容送信手段とを備える。
また、前記運転状況解析手段は、運転状況における異常として、速度超過、蛇行運転、急発進、急停止、または、居眠り運転のいずれかの有無を判定する。
本発明の車輌運転状況監視プログラムは、コンピュータを、ネットワークを通じて車輌側から所定時間毎に送信される車輌位置データ、運転状況データ及び時刻データを受信する運転状況データ受信手段、前記運転状況データを解析し、運転状況における異常の有無を判定する運転状況解析手段、及び、前記運転状況解析手段によって運転状況の異常が判定されると、その異常内容をクライアント端末に送信する異常内容送信手段として機能させるためのプログラムである。
本発明の車輌運転状況監視システムによれば、車輌の運転中にリアルタイムでデータを送信して車両運転状況監視サーバで解析を行い、危険運転が判明した場合に直ちに注意通知を発信することや警察に通報することにより、速度違反、居眠り運転や飲酒運転による交通事故を未然に防ぐ確率を高めることができる。
図1は、本発明の車輌運転状況監視システムの構成を概略的に示す構成図である。
図1に示すように、車載される車輌側システム10は、GPSアンテナ1、車輌センサ2、タイマ3、車載演算装置4、及び通信端末5を備える。
また、車輌側システム10は、ネットワーク11を通じて車輌運転状況監視サーバ12に接続されている。なお、クライアント端末13もネットワーク11を通じて車両運転状況監視サーバ12に接続される。
図1に示すように、車載される車輌側システム10は、GPSアンテナ1、車輌センサ2、タイマ3、車載演算装置4、及び通信端末5を備える。
また、車輌側システム10は、ネットワーク11を通じて車輌運転状況監視サーバ12に接続されている。なお、クライアント端末13もネットワーク11を通じて車両運転状況監視サーバ12に接続される。
車輌側システム10は、運転状況の監視対象となる各車輌に搭載されているシステムである。車輌運転状況監視サーバ12は、各車輌の運転状況を集中的に監視するサーバである。クライアント端末13は、車輌の使用者または所有者等の個人または法人等が有する端末である。
GPSアンテナ1は、いわゆるカーナビゲーションシステムに用いる単独測位用のアンテナである。
車輌センサ2は、車速センサ2A、アクセル開度センサ2B、ブレーキセンサ2C、操舵量センサ2D及び居眠り警告センサ2Eを備える。
車輌センサ2は、車速センサ2A、アクセル開度センサ2B、ブレーキセンサ2C、操舵量センサ2D及び居眠り警告センサ2Eを備える。
タイマ3は、車輌の運転状況を所定時間毎に車輌運転状況監視サーバ12に送付するための時間をカウントするタイマである。このタイマ3は、内部に設定された時刻情報に基づき、所定の経過時間をカウントするか、または、GPSデータに含まれる時間情報に基づいて所定の経過時間をカウントするように構成されている。
車載演算装置4は、GPSデータ受信部4A、センサデータ受信部4B、車載通信部4C及びメモリ4Dを備える。
GPSデータ受信部4Aは、GPSアンテナ1を介してGPSデータ(車輌位置データ)を受信し、メモリ4Dに時刻情報と共に一時記憶させる機能を有する。
GPSデータ受信部4Aは、GPSアンテナ1を介してGPSデータ(車輌位置データ)を受信し、メモリ4Dに時刻情報と共に一時記憶させる機能を有する。
センサデータ受信部4Bは、車輌に搭載された車速センサ2A、アクセル開度センサ2B、ブレーキセンサ2C、操舵量センサ2D及び居眠り警告センサ2Eから送信される車輌の運転状況データをメモリ4Dに時刻情報と共に一時記憶させる機能を有する。
車載通信部4Cは、タイマ3に設定された所定時間毎にメモリ4Dから車輌位置データ及び運転状況データを通信端末5を通じて車輌運転状況監視サーバ12に送信する機能を有する。
なお、通信端末5は、例えば携帯電話やPHS(Personal Handy-phone System)等で構成され、ネットワーク11を介して車輌位置データ及び運転状況データを運転状況監視サーバ12に送信するための回線を確保する。
車輌運転状況監視サーバ12は、データ受信手段12A、運転状況解析手段12B、車輌位置解析手段12C、異常内容送信手段12D及びデータベース12Eを備える。
データ受信手段12Aは、ネットワーク11を通じて車輌側から所定時間毎に送信される車輌位置データ、運転状況データ及び時刻データを受信すると、これら運転状況データ及び時刻データを車輌のID(Identification)と共にデータベース12Eに登録する機能を有する。
データ受信手段12Aは、ネットワーク11を通じて車輌側から所定時間毎に送信される車輌位置データ、運転状況データ及び時刻データを受信すると、これら運転状況データ及び時刻データを車輌のID(Identification)と共にデータベース12Eに登録する機能を有する。
運転状況解析手段12Bは、所定時間毎にデータベース12Eから運転状況データを読み込んで運転状況データを時系列的に解析し、運転状況における異常の有無を判定する機能を有する。この異常判定に際しては、後述する車輌位置解析手段12Cの解析結果(時系列的な車輌位置データ)を用いる。また、判定結果をデータベース12Eに登録するように設定することができる。
なお、データベース12Eへの運転状況データの登録時に運転状況解析手段12Bが運転状況データをデータベース12Eから読み込んで解析を行うように設定しても良い。
なお、データベース12Eへの運転状況データの登録時に運転状況解析手段12Bが運転状況データをデータベース12Eから読み込んで解析を行うように設定しても良い。
車輌位置解析手段12Cは、所定時間毎に車輌位置データをデータベース12Eから読み込んで車輌の位置を時系列的に解析する。ここで、解析結果をデータベース12Eに登録するように設定することができる。
なお、データベース12Eへの運転状況データの登録時に車輌位置解析手段12Cが車輌位置データをデータベース12Eから読み込んで解析を行うように設定しても良い。
なお、データベース12Eへの運転状況データの登録時に車輌位置解析手段12Cが車輌位置データをデータベース12Eから読み込んで解析を行うように設定しても良い。
異常内容送信手段12Dは、運転状況解析手段12Bによって運転状況の異常が判定されると、その異常内容をクライアント端末13に送信する機能を有する。
データベース12Eには、上述した運転状況データ及び車輌位置データの他に、GPSデータと組合せ可能な道路情報データが登録されている。この道路情報データには、道路地図と各道路における制限速度や交通標識等が含まれる。
データベース12Eには、上述した運転状況データ及び車輌位置データの他に、GPSデータと組合せ可能な道路情報データが登録されている。この道路情報データには、道路地図と各道路における制限速度や交通標識等が含まれる。
次に、運転状況解析手段12Bにおいて、運転状況における異常の有無を判定する方法について説明する。
運転状況解析手段12Bでは、車速センサ2A、アクセル開度センサ2B、ブレーキセンサ2C、操舵量センサ2D及び居眠り警告センサ2Eから送信された運転状況データである車速、アクセル開度、ブレーキペダルの踏み込み量、ハンドルの操舵量、及び居眠り警告センサの発報の有無(フラグの有無)により、各車輌における運転状況(速度超過、急発進、急ブレーキ、蛇行運転及び居眠り運転の有無)を判定する。
運転状況解析手段12Bでは、車速センサ2A、アクセル開度センサ2B、ブレーキセンサ2C、操舵量センサ2D及び居眠り警告センサ2Eから送信された運転状況データである車速、アクセル開度、ブレーキペダルの踏み込み量、ハンドルの操舵量、及び居眠り警告センサの発報の有無(フラグの有無)により、各車輌における運転状況(速度超過、急発進、急ブレーキ、蛇行運転及び居眠り運転の有無)を判定する。
速度超過の判定は、例えば、車輌位置データに基づいて各時刻において車輌が走行していた道路の法定速度と、各時刻における車輌の速度とを比較し、所定時間以上にわたって所定速度以上法定速度を超過した場合に速度超過であると判定する。
急発進の判定は、例えば、車速が所定値以下の状態から、アクセル開度の時間的変化量が所定値以上であるときに急発進であると判定する。
急ブレーキは、例えば、ブレーキペダルの踏み込み量の時間的変化量が所定値以上であるときに急ブレーキであると判定する。
急ブレーキは、例えば、ブレーキペダルの踏み込み量の時間的変化量が所定値以上であるときに急ブレーキであると判定する。
蛇行運転は、下記のようにして判定する。
まず、時間と車輌位置データより2地点間で車が走行する基準線を求める。2地点間の所定時間間隔はパラメータで設定する。
次に、2地点間における操舵量を参照し、操舵角によって決定する車輌の進行方向と基準線の方向との角度差が所定角度以上であり、かつ、この状態が所定時間内に所定回数以上繰り返し行われている場合に蛇行運転が行われたと判定する。
ここで、上述した「所定時間間隔」、「所定角度」、「所定時間」、「所定回数」はパラメータで任意に設定できる。
まず、時間と車輌位置データより2地点間で車が走行する基準線を求める。2地点間の所定時間間隔はパラメータで設定する。
次に、2地点間における操舵量を参照し、操舵角によって決定する車輌の進行方向と基準線の方向との角度差が所定角度以上であり、かつ、この状態が所定時間内に所定回数以上繰り返し行われている場合に蛇行運転が行われたと判定する。
ここで、上述した「所定時間間隔」、「所定角度」、「所定時間」、「所定回数」はパラメータで任意に設定できる。
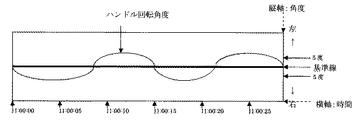
図2は、蛇行運転をした車両におけるハンドルの操舵量の時間的変化の一例を示す図である。
ここで、上述した各パラメータは「5秒ごと」、「5度」、「30秒」、「3回」と設定されている場合に、図2に示す例では、30秒の間に、操舵角によって決定する車輌の進行方向と基準線の方向との角度差が5度以上になった場合が3回あるので蛇行運転であると判定する。
ここで、上述した各パラメータは「5秒ごと」、「5度」、「30秒」、「3回」と設定されている場合に、図2に示す例では、30秒の間に、操舵角によって決定する車輌の進行方向と基準線の方向との角度差が5度以上になった場合が3回あるので蛇行運転であると判定する。
居眠り運転は、下記のようにして判定する。
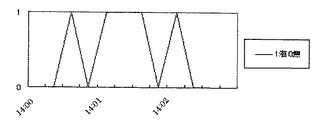
図3は、居眠り運転警告センサの検出結果を示す図である。
車載されている居眠り運転警告センサ2Eの居眠り警告有無のデータに基づき、警告があったか否かを判定し、警告が1回でもあった場合は居眠り運転であると判定する。
警告有無データは、時刻と2数値(フラグ)で持ち、一定時間内に1回でも“1”があれば居眠り運転であると判定する。
図3は、居眠り運転警告センサの検出結果を示す図である。
車載されている居眠り運転警告センサ2Eの居眠り警告有無のデータに基づき、警告があったか否かを判定し、警告が1回でもあった場合は居眠り運転であると判定する。
警告有無データは、時刻と2数値(フラグ)で持ち、一定時間内に1回でも“1”があれば居眠り運転であると判定する。
図4は、本発明の車輌運転状況監視システムにおける車輌運転状況監視サーバ内における処理手順を示すフローチャートである。
まず、ステップS1でデータベース12Eから運転状況データを読み込む。具体的には、車速、アクセル開度、ブレーキペダルの踏み込み量、ハンドルの操舵量、及び居眠り警告センサ2Eの発報の有無を読み込む。
なお、このとき運転状況解析手段12Bは、所定時間毎にデータベース12Eから運転状況データを読み込んで運転状況データを読み込むと共に、車輌位置解析手段12Cの解析結果(時系列的な車輌位置データ)をデータベース12Eから読み込む。
まず、ステップS1でデータベース12Eから運転状況データを読み込む。具体的には、車速、アクセル開度、ブレーキペダルの踏み込み量、ハンドルの操舵量、及び居眠り警告センサ2Eの発報の有無を読み込む。
なお、このとき運転状況解析手段12Bは、所定時間毎にデータベース12Eから運転状況データを読み込んで運転状況データを読み込むと共に、車輌位置解析手段12Cの解析結果(時系列的な車輌位置データ)をデータベース12Eから読み込む。
次に、速度超過(ステップS2〜S4)、急発進(ステップS5〜S7)、急ブレーキ(ステップS8〜S10)、蛇行運転(ステップS11〜S13)及び居眠り運転(ステップS14〜S16)を並列的に判定する。
速度超過の判定を行う初めのステップS2では、車速データを取得したかを判定する。取得した場合は、フローはステップS3に進行し、速度超過があったか否かを判定する。
具体的には、車輌位置データに基づいて各時刻において車輌が走行していた道路の法定速度と、各時刻における車輌の速度とを比較し、所定時間以上にわたって所定速度以上法定速度を超過していたか否かを判定する。
速度超過があったと判定した場合は、フローはステップS4に進行し、異常内容送信手段12Dによって速度超過の警告が車輌のIDと共にクライアント端末13に送信される。
クライアント端末13のモニタには、図5に示すように速度超過を示すウィンドウが表示される。
なお、ステップS2及びS3において、それぞれ「No」と判定した場合は、フローはリターンする。
具体的には、車輌位置データに基づいて各時刻において車輌が走行していた道路の法定速度と、各時刻における車輌の速度とを比較し、所定時間以上にわたって所定速度以上法定速度を超過していたか否かを判定する。
速度超過があったと判定した場合は、フローはステップS4に進行し、異常内容送信手段12Dによって速度超過の警告が車輌のIDと共にクライアント端末13に送信される。
クライアント端末13のモニタには、図5に示すように速度超過を示すウィンドウが表示される。
なお、ステップS2及びS3において、それぞれ「No」と判定した場合は、フローはリターンする。
急発進の判定を行う初めのステップS5では、アクセル開度データを取得したかを判定する。取得した場合は、フローはステップS6に進行し、車速が所定値以下の時刻におけるアクセル開度の時間的変化が所定値以上であったときがあるかを判定する。
あると判定した場合は、ステップS7において異常内容送信手段12Dによって急発進の警告が車輌のIDと共にクライアント端末13に送信される。
なお、ステップS5及びS6において、それぞれ「No」と判定した場合は、フローはリターンする。
あると判定した場合は、ステップS7において異常内容送信手段12Dによって急発進の警告が車輌のIDと共にクライアント端末13に送信される。
なお、ステップS5及びS6において、それぞれ「No」と判定した場合は、フローはリターンする。
急ブレーキの判定を行う初めのステップS8では、ブレーキペダルの踏み込み量データを取得したかを判定する。取得した場合は、フローはステップS9に進行し、ブレーキペダルの踏み込み量の時間的変化が所定値以上であったときがあるかを判定する。
ブレーキペダルの踏み込み量の時間的変化が所定値以上であったときがあると判定した場合は、ステップS10において異常内容送信手段12Dによって急ブレーキの警告が車輌のIDと共にクライアント端末13に送信される。
なお、ステップS8及びS9において、それぞれ「No」と判定した場合は、フローはリターンする。
ブレーキペダルの踏み込み量の時間的変化が所定値以上であったときがあると判定した場合は、ステップS10において異常内容送信手段12Dによって急ブレーキの警告が車輌のIDと共にクライアント端末13に送信される。
なお、ステップS8及びS9において、それぞれ「No」と判定した場合は、フローはリターンする。
蛇行運転の判定を行う初めのステップS11では、操舵量データを取得したかを判定する。取得した場合は、フローはステップS12に進行し、2地点間における操舵量を参照し、操舵角によって決定する車輌の進行方向と基準線の方向との角度差が所定角度以上であり、かつ、この状態が所定時間内に所定回数以上繰り返し行われた場合があったかを判定する。
所定角度以上であり、かつ、この状態が所定時間内に所定回数以上繰り返し行われた場合があると判定した場合は、ステップS13において異常内容送信手段12Dによって蛇行運転の警告が車輌のIDと共にクライアント端末13に送信される。
なお、ステップS11及びS12において、それぞれ「No」と判定した場合は、フローはリターンする。
所定角度以上であり、かつ、この状態が所定時間内に所定回数以上繰り返し行われた場合があると判定した場合は、ステップS13において異常内容送信手段12Dによって蛇行運転の警告が車輌のIDと共にクライアント端末13に送信される。
なお、ステップS11及びS12において、それぞれ「No」と判定した場合は、フローはリターンする。
居眠り運転の判定を行う初めのステップS14では、居眠り運転信号を取得したかを判定する。取得した場合はフローはステップS15に進行し、居眠り運転警告センサの居眠り警告有無のデータに基づき、警告があったか否かを判定し、警告が1度でもあったかを判定する。警告有無データは、時刻と2数値(フラグ)で持ち、一定時間内に1回でも“1”があれば居眠り運転であると判定する。
居眠り運転を示すフラグがあった場合は、フローはステップS16に進行し、異常内容送信手段12Dによって居眠り運転の警告が車輌のIDと共にクライアント端末13に送信される。
なお、ステップS14及びS15において、それぞれ「No」と判定した場合は、フローはリターンする。
居眠り運転を示すフラグがあった場合は、フローはステップS16に進行し、異常内容送信手段12Dによって居眠り運転の警告が車輌のIDと共にクライアント端末13に送信される。
なお、ステップS14及びS15において、それぞれ「No」と判定した場合は、フローはリターンする。
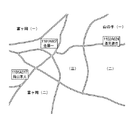
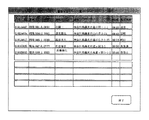
なお、速度超過、急発進、急ブレーキ、蛇行運転及び居眠り運転の判定結果を図6に示すように、地図上に示した形でクライアント端末13のモニタに表示させてもよく、また、図7に示すように表形式にしてクライアント端末13のモニタに表示させてもよい。さらに、このような地図上に示したデータや表形式のデータを車両運転状況監視サーバ12のデータベース12Eに登録し、一定期間毎にクライアントに報告するようにしてもよい。
以上、本発明の車輌運転状況監視システムによれば、車輌の運転中にリアルタイムでデータを送信して車両運転状況監視サーバで解析を行い、危険運転が判明した場合に直ちに注意通知を発信することや警察に通報することにより、速度違反、居眠り運転や飲酒運転による交通事故を未然に防ぐ確率を高めることができる。
また、特に、速度超過、急発進、急ブレーキ、蛇行運転及び居眠り運転の有無を判定してクライアント端末13に送付するので、車輌の管理者側で車輌の運転状況をリアルタイムに把握することができる。
また、特に、速度超過、急発進、急ブレーキ、蛇行運転及び居眠り運転の有無を判定してクライアント端末13に送付するので、車輌の管理者側で車輌の運転状況をリアルタイムに把握することができる。
1 GPSアンテナ、2 車輌センサ、2A 車速センサ、2B アクセル開度センサ、2C ブレーキセンサ、2D 操舵量センサ、2E 居眠り警告センサ、3 タイマ、4 車載演算装置、4A データ受信部、4B センサデータ受信部、4C 車載通信部、4D メモリ、5 通信端末、10 車輌側システム、11 ネットワーク、12 車輌運転状況監視サーバ、12A データ受信手段、12D 異常内容送信手段、12B 運転状況解析手段、12C 車輌位置解析手段、12E データベース、13 クライアント端末。
Claims (3)
- ネットワークを通じて車輌側から所定時間毎に送信される車輌位置データ、運転状況データ及び時刻データを受信する運転状況データ受信手段と、
前記運転状況データを解析し、運転状況における異常の有無を判定する運転状況解析手段と、
前記運転状況解析手段によって運転状況の異常が判定されると、その異常内容をクライアント端末に送信する異常内容送信手段と
を備える車輌運転状況監視システム。 - 前記運転状況解析手段は、運転状況における異常として、速度超過、蛇行運転、急発進、急停止、または、居眠り運転のいずれかの有無を判定することを特徴とする請求項1記載の車輌運転状況監視システム。
- コンピュータを、
ネットワークを通じて車輌側から所定時間毎に送信される車輌位置データ、運転状況データ及び時刻データを受信する運転状況データ受信手段、
前記運転状況データを解析し、運転状況における異常の有無を判定する運転状況解析手段、及び、
前記運転状況解析手段によって運転状況の異常が判定されると、その異常内容をクライアント端末に送信する異常内容送信手段
として機能させるための車輌運転状況監視プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004104874A JP2005293032A (ja) | 2004-03-31 | 2004-03-31 | 車輌運転状況監視システム及びこのシステム用の車輌運転状況監視プログラム。 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004104874A JP2005293032A (ja) | 2004-03-31 | 2004-03-31 | 車輌運転状況監視システム及びこのシステム用の車輌運転状況監視プログラム。 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005293032A true JP2005293032A (ja) | 2005-10-20 |
Family
ID=35325922
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004104874A Pending JP2005293032A (ja) | 2004-03-31 | 2004-03-31 | 車輌運転状況監視システム及びこのシステム用の車輌運転状況監視プログラム。 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005293032A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008059059A (ja) * | 2006-08-29 | 2008-03-13 | Hino Motors Ltd | 携帯電話端末およびプログラム |
| WO2009093726A1 (ja) * | 2008-01-22 | 2009-07-30 | Advanced Telecommunications Research Institute International | 危険運転予防意識判定システムおよび危険運転予防意識判定方法 |
| JP2010002993A (ja) * | 2008-06-18 | 2010-01-07 | Parama Tec:Kk | 運転監視システム |
| JP2018116362A (ja) * | 2017-01-16 | 2018-07-26 | 株式会社A.R.M.S. | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019105929A (ja) * | 2017-12-11 | 2019-06-27 | 矢崎エナジーシステム株式会社 | 管理システム |
| JP2021111346A (ja) * | 2019-12-30 | 2021-08-02 | 株式会社Subaru | 移動情報提供システム、サーバ装置、および車両 |
| US11341852B2 (en) | 2018-02-26 | 2022-05-24 | Nec Corporation | Dangerous act resolution system, apparatus, method, and program |
| CN115100861A (zh) * | 2022-06-22 | 2022-09-23 | 公安部交通管理科学研究所 | 一种酒驾车辆识别方法 |
| US12027039B2 (en) | 2019-12-30 | 2024-07-02 | Subaru Corporation | Mobility information provision system, server, and vehicle |
| US12046140B2 (en) | 2019-12-30 | 2024-07-23 | Subaru Corporation | Mobility information provision system, server, and vehicle |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1116083A (ja) * | 1997-06-23 | 1999-01-22 | Yazaki Corp | 運行管理システム |
| JP2002042288A (ja) * | 2000-07-26 | 2002-02-08 | Yazaki Corp | 運行状態記録装置及びそれを利用した運行管理システム |
| JP2002225586A (ja) * | 2001-02-05 | 2002-08-14 | Nissan Motor Co Ltd | 車両の安全運転度記録装置 |
| JP2004021331A (ja) * | 2002-06-12 | 2004-01-22 | Yazaki Corp | 車両関連情報提供システム及びその方法 |
| JP2004075023A (ja) * | 2002-08-22 | 2004-03-11 | Alpine Electronics Inc | 車両情報記録装置およびシステム |
-
2004
- 2004-03-31 JP JP2004104874A patent/JP2005293032A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1116083A (ja) * | 1997-06-23 | 1999-01-22 | Yazaki Corp | 運行管理システム |
| JP2002042288A (ja) * | 2000-07-26 | 2002-02-08 | Yazaki Corp | 運行状態記録装置及びそれを利用した運行管理システム |
| JP2002225586A (ja) * | 2001-02-05 | 2002-08-14 | Nissan Motor Co Ltd | 車両の安全運転度記録装置 |
| JP2004021331A (ja) * | 2002-06-12 | 2004-01-22 | Yazaki Corp | 車両関連情報提供システム及びその方法 |
| JP2004075023A (ja) * | 2002-08-22 | 2004-03-11 | Alpine Electronics Inc | 車両情報記録装置およびシステム |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008059059A (ja) * | 2006-08-29 | 2008-03-13 | Hino Motors Ltd | 携帯電話端末およびプログラム |
| WO2009093726A1 (ja) * | 2008-01-22 | 2009-07-30 | Advanced Telecommunications Research Institute International | 危険運転予防意識判定システムおよび危険運転予防意識判定方法 |
| JP2009199583A (ja) * | 2008-01-22 | 2009-09-03 | Advanced Telecommunication Research Institute International | 危険運転予防意識判定システムおよび危険運転予防意識判定方法 |
| CN101952868A (zh) * | 2008-01-22 | 2011-01-19 | 株式会社国际电气通信基础技术研究所 | 危险驾驶预防意识判定系统及危险驾驶预防意识判定方法 |
| JP2010002993A (ja) * | 2008-06-18 | 2010-01-07 | Parama Tec:Kk | 運転監視システム |
| JP2018116362A (ja) * | 2017-01-16 | 2018-07-26 | 株式会社A.R.M.S. | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019105929A (ja) * | 2017-12-11 | 2019-06-27 | 矢崎エナジーシステム株式会社 | 管理システム |
| JP7107674B2 (ja) | 2017-12-11 | 2022-07-27 | 矢崎エナジーシステム株式会社 | 管理システム |
| US11341852B2 (en) | 2018-02-26 | 2022-05-24 | Nec Corporation | Dangerous act resolution system, apparatus, method, and program |
| JP2021111346A (ja) * | 2019-12-30 | 2021-08-02 | 株式会社Subaru | 移動情報提供システム、サーバ装置、および車両 |
| US12027039B2 (en) | 2019-12-30 | 2024-07-02 | Subaru Corporation | Mobility information provision system, server, and vehicle |
| US12046140B2 (en) | 2019-12-30 | 2024-07-23 | Subaru Corporation | Mobility information provision system, server, and vehicle |
| JP7545283B2 (ja) | 2019-12-30 | 2024-09-04 | 株式会社Subaru | 移動情報提供システム、サーバ装置、および車両 |
| CN115100861A (zh) * | 2022-06-22 | 2022-09-23 | 公安部交通管理科学研究所 | 一种酒驾车辆识别方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5659939B2 (ja) | 車両検出システム、車載機およびセンター | |
| CN111210620B (zh) | 一种驾驶员画像的生成方法、装置、设备及存储介质 | |
| TWI547913B (zh) | 即時駕駛輔助系統及方法 | |
| JP2020135675A (ja) | 危険運転リスク情報出力システム、及び、危険運転リスク情報出力プログラム | |
| WO2021002368A1 (ja) | 安全性能評価装置、安全性能評価方法、情報処理装置、及び情報処理方法 | |
| GB2522728A (en) | Monitoring device | |
| JP2015022499A (ja) | 運転特徴判定システム | |
| CN112947137A (zh) | 氢能源汽车控制方法、氢能源汽车及物联网系统 | |
| JP2023067970A (ja) | 情報処理装置 | |
| CN111209797A (zh) | 一种驾驶行为监控的方法、装置、设备和存储介质 | |
| JP2014075035A (ja) | 運転支援システム、及び、当該システムに用いられる車載機 | |
| JP2020135674A (ja) | 交通リスク情報出力システム、及び、交通リスク情報出力プログラム | |
| JP2017167795A (ja) | 迷惑運転検出装置及び迷惑運転検出方法 | |
| JP2008165604A (ja) | 自動車事故予防のための警告システム | |
| JP2005293032A (ja) | 車輌運転状況監視システム及びこのシステム用の車輌運転状況監視プログラム。 | |
| CN113352989B (zh) | 智能行车安全辅助方法、产品、设备和介质 | |
| CN111862386A (zh) | 一种车辆的事故记录方法、装置、介质及服务器 | |
| JP2014137682A (ja) | 移動体端末の位置情報を用いた交通情報提供システム | |
| WO2015188450A1 (zh) | 预警处理方法和装置 | |
| CN106767859A (zh) | 一种车辆导航方法 | |
| JP2015022124A (ja) | 運転特徴判定システム | |
| US10733885B2 (en) | Multi-vehicle prediction system | |
| WO2015060805A1 (en) | A system for processing data obtained from black boxes | |
| US12406571B2 (en) | Methods and systems for detecting bad driving in other vehicles and reporting about the same | |
| US12428015B2 (en) | Information notification device, information notification method and non-transitory recording medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060905 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061031 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20061219 |