JP2005292803A - 自動ピアノ及び鍵を自動的に操作するためのプログラム - Google Patents
自動ピアノ及び鍵を自動的に操作するためのプログラム Download PDFInfo
- Publication number
- JP2005292803A JP2005292803A JP2005055662A JP2005055662A JP2005292803A JP 2005292803 A JP2005292803 A JP 2005292803A JP 2005055662 A JP2005055662 A JP 2005055662A JP 2005055662 A JP2005055662 A JP 2005055662A JP 2005292803 A JP2005292803 A JP 2005292803A
- Authority
- JP
- Japan
- Prior art keywords
- key
- trajectory
- acceleration
- trajectory data
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000001133 acceleration Effects 0.000 claims abstract description 158
- 230000033001 locomotion Effects 0.000 claims abstract description 37
- 230000002123 temporal effect Effects 0.000 claims abstract description 4
- 230000007704 transition Effects 0.000 claims abstract description 4
- 238000000034 method Methods 0.000 claims description 26
- 238000012545 processing Methods 0.000 claims description 26
- 230000008859 change Effects 0.000 claims description 22
- 230000003247 decreasing effect Effects 0.000 claims 1
- 238000001514 detection method Methods 0.000 description 26
- 230000008569 process Effects 0.000 description 14
- 238000004364 calculation method Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 8
- 238000010606 normalization Methods 0.000 description 6
- 238000006073 displacement reaction Methods 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 230000000994 depressogenic effect Effects 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000005284 excitation Effects 0.000 description 3
- 238000002474 experimental method Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000004069 differentiation Effects 0.000 description 2
- 230000003189 isokinetic effect Effects 0.000 description 2
- 230000003252 repetitive effect Effects 0.000 description 2
- 241001122315 Polites Species 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000005347 demagnetization Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000004615 ingredient Substances 0.000 description 1
- 238000007562 laser obscuration time method Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000033764 rhythmic process Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 235000005282 vitamin D3 Nutrition 0.000 description 1
- 239000011647 vitamin D3 Substances 0.000 description 1
Images



Landscapes
- Electrophonic Musical Instruments (AREA)
Abstract
【課題】自動演奏ピアノにおいて、連打をよりスムーズに行えるようにすると共に、豊かな演奏ニュアンスや音色の再現ができるようにする。
【解決手段】演奏情報に基づき、自動的に操作されるべき特定の鍵の動きを規定するために、該特定の鍵の動きの位置、速度及び加速度成分の時間的変遷を表す1次的軌道データを生成する。この1次的軌道データにおける加速度成分に基づき前記特定の鍵の動きに関する躍動成分を算出し、この躍動成分によって前記1次的軌道データを修正した2次的軌道データを生成する。生成した2次的軌道データに基づき、前記特定の鍵を駆動するための駆動装置をサーボ制御する。
【選択図】図3
Description
図1は、この実施例に係る自動ピアノの概要構成図であり、機械的な発音機構の要部と共に、電気的制御系に関る機能ブロックの要部を抽出して示している。図1に示すように、自動ピアノは、機械的な発音機構として、複数(例えば88個)の鍵1と、該鍵1の運動をハンマに伝達するためのアクション機構2と、対応する鍵1の運動に連動して打弦運動するハンマ3と、該ハンマ2によって打撃される弦4と、弦4の振動を止めるためのダンパ5とを含む。鍵1の後端下面側には、当該鍵1を駆動するための鍵駆動装置として、電磁ソレノイド6が具備されている。鍵1は、バランスピンPに貫通された位置を凡その支点として、上下揺動可能に支持されており、非押鍵時(外力を加えない状態)では図1において実線で示すレスト位置にある。ソレノイド6が駆動(励磁)されると、ソレノイド6のプランジャが鍵1の後端を突き上げ、鍵1はバランスピンPを支点に揺動し、鍵1の前端が下がることで、鍵1が押鍵操作される。ソレノイド6の消磁に応じてプランジャが下がれば、鍵1はレスト位置に戻る(離鍵操作)。鍵1は、演奏操作(押鍵及び離鍵)に応じて、基本的にはレスト位置からエンド位置(図において2点鎖線で示す位置)の間で上下にストロークする。このとき、該演奏操作に連動して、アクション機構2が作動して、ダンパ5が弦4から離れ、弦4の振動の抑止が解除されると共に、ハンマ3が回動して弦4を打弦する。
また、当該自動ピアノにおいては、ハンマ3の動作を検出するためのハンマセンサ27が設けられてよい。該ハンマセンサ27も前記キーセンサ25と概ね同様に構成されてよい。この例では、ハンマセンサ27の出力は、後述する記録制御部28に供給され、演奏録音時の演奏情報の生成処理に際して利用される。
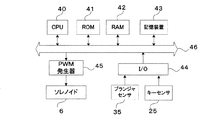
CPU40は、当該自動ピアノの全体的な動作を制御するとともに、演奏情報の再生処理や、鍵操作に応じた演奏情報の記録(演奏録音)処理等の各種信号処理を実行する。CPU40が実行する各種処理の制御プログラムは、例えばROM41内に記憶されていてよい。該各種処理の実行中に発生した各種データや各種パラメータは、RAM42(あるいはROM41)等の適宜のメモリ内に記憶される。
また、後述する演奏情報再生時にCPU40において生成されるソレノイド駆動信号は、PWM発生器45を介してPWM形式の電流信号(以下PWM信号と略称)に変換され、ソレノイド6に出力される。なお、当該自動ピアノには、この他にも操作者(ユーザ)が動作モードの選択等を行うための設定操作子群や、適宜の外部機器に接続する通信インターフェース等が具備されてよい。
先に引用した特許文献1には、従来から知られる軌道作成の原理の一例が示されている。これは、再生すべき演奏情報に基づき軌道データを生成するための基本的なパラメータとして、鍵軌道上の所定位置(リファレンスポイント)において鍵がとるべき速度の情報(リファレンス速度)、及び、鍵1が該リファレンスポイントを通過すべき時刻(リファレンス時刻)を算出すると共に、該リファレンスポイントを通過する任意の種類の軌道データを生成するものである。ここで、リファレンスポイントは実験等によりあらかじめ設定しうる鍵の所定のストローク位置である。また、リファレンス速度とリファレンス時刻は、再生すべき演奏情報に基づき算出することが可能である。このリファレンス速度とリファレンス時刻を算出するための演算処理の詳細は前記特許文献1に示されており、本実施例においても該特許文献1の記載と同様な処理を採用して差し支えない。
X=vP*t+xR・式(1)
なお、本明細書中では、数式中の「*」は乗算を表すものとする。
上記式(1)により、再生すべき演奏情報(押鍵イベント)を直線軌道に従って再現する際の押鍵開始時刻(押鍵レスト出発時刻tPR)と押鍵終了時刻(押鍵エンド到着時刻tPE)を求めることができる。そして、この軌道データに従って、押鍵レスト出発時刻tPRから一定速度vPで鍵を押鍵駆動するように制御することができる。
XN=vN*tN+xE・式(2)
上記式(2)により、再生すべき演奏情報(離鍵イベント)を直線軌道に従って再現する際の離鍵開始時刻(離鍵エンド出発時刻tNE)と離鍵終了時刻(離鍵レスト到着時刻tNR)を求めることができる。そして、この軌道データに従って、離鍵エンド出発時刻tNEから一定速度vNで鍵が離鍵されるように制御することができる。
図3(a)に示す連打軌道は、具体的には、鍵の離鍵時の軌道については、エンド位置xEからトランジット位置xTの間では離鍵等速軌道によって表現され、該トランジット位置xTから離鍵動作終了時点までの間で、鍵速度が漸減変化する特性を示す曲線軌道(以下、これを離鍵スローダウン軌道と称する)によって表現される。また、押鍵時の軌道については、押鍵動作開始時点からトランジット位置xTまでの間では、鍵速度が漸増変化する特性を示す曲線軌道(以下、これを押鍵スローアップ軌道と称する)によって表現され、トランジット位置xTからエンド位置xEの間では押鍵等速軌道によって表現される。
この実施例では、説明の便宜上、離鍵等速軌道と押鍵等速軌道とが交差するかどうかのみによって、曲線軌道(離鍵スローダウン軌道及び押鍵スローアップ軌道)の作成が必要かどうか判定するものとするが、更に、離鍵スローダウン軌道と押鍵スローアップ軌道の交差を判定するよう構成しても差し支えない。また、当該演奏イベントにおいて曲線軌道を作成すべきことを標識するデータを演奏情報に含み、該データによって曲線軌道の作成が必要かどうか判定できるよう構成してもよい。要するに、加速度特性で鍵を駆動する必要のあるときに、曲線軌道(離鍵スローダウン軌道及び押鍵スローアップ軌道)の作成を行うようにすればよい。
tc=(−vN*tNE+vP*tPE)/(−vN+vP)・式(3)
なお、上記式(3)による等速時交差時刻tcの算出に際して、離鍵リファレンス速度vN(但し<0)、離鍵エンド出発時刻tNE、押鍵リファレンス速度vP(但し>0)及び押鍵エンド到着時刻tPEは、夫々既知値として定まる。
先ず、離鍵スローダウン軌道における離鍵加速度aNを求める。加速度は速度の時間微分であるから下記式(4)によって算出することができる。
aN=(0−vN)/(tc−tNT)・(4)
上記式(4)における離鍵トランジット通過時刻tNTは、下記式(5)によって算出できる。
tNT=tNE+(xT−xE)/vN・(5)
なお、上記式(5)におけるトランジット位置xT及びエンド位置xEは、固定値として予め設定されている。
aP=(vP−0)/(tPT−tc)・(6)
また、上記式(6)における押鍵トランジット通過時刻tPTは、下記式(7)によって算出できる。
tPT=tPE−(xE−xT)/vP・(7)
以上の処理によって求めた、鍵の自動操作のための位置、速度、加速度成分からなる軌道データを、1次的軌道データということにする。この1次的軌道データは、従来技術によって求められるもので、加速度特性は等加速度特性である。
離鍵スローダウン軌道における離鍵躍動jNは下記式(8)によって算出することができる。
jN=2*aN/(tc−tNT)・(8)
但し、上記式(8)において、aNは前記等加速度軌道における離鍵加速度である。この意味は、時間長「tc−tNT」の間での加速度の変化量をaNの2倍にするような、単位時間当たりの加速度変化値を、躍動成分jNとして算出する、ということである。なお、係数「2」の値は設計上適宜に可変調整してよい。
また、押鍵スローアップ軌道における押鍵躍動jPは下記式(9)によって算出することができる。
jP=2*aP/(tPT−tc)・(9)
但し、上記式(9)において、aPは前記等加速度軌道における押鍵加速度である。この意味も上記と同様である。
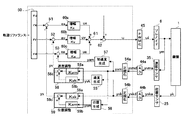
図4は、当該自動ピアノにおけるサーボ制御のシステム構成の一例を機能的に示すブロック図である。図4において、1点鎖線で囲むフィードバックループにおける各種演算処理は、CPU40(図2参照)が実行するソフトウェアプログラムによって実施される。
速度調整部58において、具体的には、プランジャ速度検出値yvmに対して所定の係数Kvmによって重み付け(演算要素58a)し、また、鍵速度値yvkに対して所定の係数Kvkによって重み付け(演算要素58b)して、加算要素58cにて両者を加算することで速度フィードバック信号yvを得ている。ここで、両者の重み係数Kvm及びKvkは、「Kvm+Kvk=1」の関係を持たせつつ、プランジャ速度検出値yvmと鍵速度値yvkのいずれに重点を置いた速度フィードバック信号yvを得るのかに応じて設定されるもので、実験の結果を基に適切な値に設定する。実験結果に基づく重み係数の一例として、係数Kvm=0.7、係数Kvk=0.3と設定しうる。
位置調整部59において、具体的には、鍵位置検出値yxkに対して所定の係数Kxkによって重み付け(演算要素59a)し、また、プランジャ位置値yxmに対して所定の係数Kxmによって重み付け(演算要素59b)して、加算要素59cにて両者を加算することで位置フィードバック信号yxを得ている。ここで、両者の重み係数Kxk及びKxmは、「Kxk+Kxm=1」の関係を持たせつつ、鍵位置検出値yxkとプランジャ位置値yxmのいずれに重点を置いた位置フィードバック信号yxを得るのかに応じて設定されるもので、実験の結果を基に適切な値に設定する。実験結果に基づく重み係数の一例として、係数Kxk=0.9、係数Kxm=0.1と設定しうる。
上述したサーボ制御システムによれば、直接のサーボ制御対象となるソレノイド6の動きと該ソレノイド6によって駆動される鍵1の動きとを反映したソレノイド駆動信号uが生成されるので、この駆動信号uに応じた励磁電流信号uiでソレノイド6を駆動することで、鍵1を目標値に対してより正確に動作させることができ、与えられた軌道リファレンスをより精密に再現することができるようなる。また、図4に示すサーボ制御システムによれば、位置センサたるキーセンサ25の出力と速度センサたるプランジャセンサ35の出力から生成した位置、速度及び加速度の各事象についてのフィードバック信号と、位置、速度及び加速度の各事象の目標値とに基づいたハイブリットタイプのサーボ制御を実現することで、より高性能な自動ピアノを実現することができる。ここで、当サーボ制御システムでは、位置センサ(キーセンサ25)の出力を微分して生成した速度情報、速度センサ(プランジャセンサ35)の出力を積分して生成した位置情報、及び、速度センサの出力を微分して生成した加速度情報を利用しており、この点について、当該ハイブリットタイプのサーボ制御を位置制御の立場からみれば、速度サーボ制御が微分補償器としての機能を果たし、また、速度制御の立場からみれば、位置サーボ制御が積分補償器、加速度サーボが微分補償器としての機能を果たす。
これに対して、(b)に示す等速度の場合は、レスト位置x0から、初期速度v0=80mm/sで動作開始して、等速度v0=80mm/sでエンド位置x1まで動作する軌道となるため、この軌道に従って鍵がレスト位置x0からエンド位置x1に到達するのにかかる時間は、125msとなる。離鍵時の等速度軌道は、等速度v2=−80mm/sでエンド位置x1からレスト位置x0まで動作するものであるから、その所要時間は125msとなる。また、(c)に示す等加速の場合は、レスト位置x0から、初期速度v0=0mm/sで動作開始して、等加速度a0=320mm/s^2にてエンド位置x1まで動作し、最終速度v1=80mm/sとなる。この軌道に従って鍵がレスト位置x0からエンド位置x1に到達するのにかかる時間は、250msとなる。この場合の離鍵スローダウン軌道は、初期速度v2=−80mm/sで動作開始して、等加速度a2=320mm/s^2にてスローダウンする軌道であり、レスト位置x0において最終速度v1=80mm/sとなる。この軌道に従って鍵がエンド位置x1からレスト位置x0に到達するのにかかる時間は250msである。
また、上述の例では、鍵1を駆動するための軌道データの作成について説明したが、これに限らず、例えばペダル等を自動で駆動するための軌道データに、この発明に係る等躍動軌道を適用することも可能である。また、この発明に係る自動ピアノの形態は、グランドピアノ、アップライトピアノいずれであってもよい。
Claims (5)
- 複数の鍵と、
前記複数の鍵の各々を個別に駆動するための駆動装置と、
演奏情報に基づき、自動的に操作されるべき特定の鍵の動きを規定するために、該特定の鍵の動きの位置、速度及び加速度成分の時間的変遷を表す1次的軌道データを生成する1次的軌道データ生成部と、
前記1次的軌道データにおける加速度成分に基づき前記特定の鍵の動きに関する躍動成分を算出し、この躍動成分によって前記1次的軌道データを修正した2次的軌道データを生成する2次的軌道データ生成部と、
前記2次的軌道データに基づき、前記特定の鍵を駆動するために前記駆動装置を付勢する制御装置と
を備えることを特徴とする自動ピアノ。 - 前記1次的軌道データによって表わされる軌道には等加速度期間が含まれ、
前記2次的軌道データ生成部は、この等加速度区間の加速度成分に基づき、該区間で加速度を徐々に変化させるように前記躍動成分を算出し、この躍動成分によって前記1次的軌道データにおける前記等加速度区間に対応する期間で加速度が変化するように修正した2次的軌道データを生成することを特徴とする請求項1に記載の自動ピアノ。 - 前記躍動成分は、加速度の単位時間当たりの変化を示す値であり、この値を増減することで加速度が逐次変化するように前記1次的軌道データを修正し、これにより、前記等加速度区間に対応する期間で加速度が変化するように修正された前記2次的軌道データが生成されることを特徴とする請求項2に記載の自動ピアノ。
- 前記1次的軌道データ生成部は、前記特定の鍵を等速で押鍵操作するときの押鍵等速軌道と等速で離鍵操作するときの離鍵等速軌道をそれぞれ算出し、該押鍵等速軌道と離鍵等速軌道の交差点を含む或る区間を等加速度区間に設定して押鍵から離鍵に切り替わる等加速度軌道を算出し、これらの等速軌道と等加速度軌道の組み合わせによって前記1次的軌道データを生成し、
前記2次的軌道データ生成部は、前記等加速度区間で或る一定値をとるように前記躍動成分を定め、この躍動成分の一定値に従い加速度が逐次変化するように前記等加速度区間における加速度の軌道を変更し、この加速軌道の変更に伴い前記1次的軌道データを修正した前記2次的軌道データを生成する、
ことを特徴とする請求項1に記載の自動ピアノ。 - 複数の鍵と、前記複数の鍵の各々を個別に駆動するための駆動装置とを有する自動ピアノにおいて、演奏情報に基づき鍵を自動的に操作するための処理をコンピュータに実行させるための命令群からなるプログラムであって、該プログラムは、該コンピュータに、
演奏情報に基づき、自動的に操作されるべき特定の鍵の動きを規定するために、該特定の鍵の位置、速度及び加速度の時間的変遷を表す1次的軌道データを生成する手順と、
前記1次的軌道データにおける加速度成分に基づき前記特定の鍵の動きに関する躍動成分を算出し、この躍動成分によって前記1次的軌道データを修正した2次的軌道データを生成する手順と
を実行させることからなり、生成された前記2次的軌道データに基づき前記駆動装置が駆動されて前記特定の鍵が自動的に操作される。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005055662A JP4670395B2 (ja) | 2004-03-12 | 2005-03-01 | 自動ピアノ及び鍵を自動的に操作するためのプログラム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004071043 | 2004-03-12 | ||
| JP2005055662A JP4670395B2 (ja) | 2004-03-12 | 2005-03-01 | 自動ピアノ及び鍵を自動的に操作するためのプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005292803A true JP2005292803A (ja) | 2005-10-20 |
| JP4670395B2 JP4670395B2 (ja) | 2011-04-13 |
Family
ID=35325734
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005055662A Expired - Fee Related JP4670395B2 (ja) | 2004-03-12 | 2005-03-01 | 自動ピアノ及び鍵を自動的に操作するためのプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4670395B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007199411A (ja) * | 2006-01-26 | 2007-08-09 | Yamaha Corp | 鍵盤楽器 |
| JP2007264035A (ja) * | 2006-03-27 | 2007-10-11 | Yamaha Corp | 鍵盤楽器 |
| JP2007272198A (ja) * | 2006-03-08 | 2007-10-18 | Yamaha Corp | 鍵盤楽器 |
| JP2009229640A (ja) * | 2008-03-21 | 2009-10-08 | Yamaha Corp | 電子楽器用力覚制御装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07271355A (ja) * | 1994-03-25 | 1995-10-20 | Yamaha Corp | 自動ピアノおよび演奏データ加工装置 |
| JPH0981125A (ja) * | 1995-09-19 | 1997-03-28 | Yamaha Corp | 自動ピアノ |
| JPH10177378A (ja) * | 1996-10-18 | 1998-06-30 | Yamaha Corp | 鍵盤用力覚制御装置、鍵盤用力覚制御方法および記憶媒体 |
| JP2003295863A (ja) * | 2002-04-03 | 2003-10-15 | Kawai Musical Instr Mfg Co Ltd | 鍵盤楽器の押鍵情報検出装置 |
-
2005
- 2005-03-01 JP JP2005055662A patent/JP4670395B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07271355A (ja) * | 1994-03-25 | 1995-10-20 | Yamaha Corp | 自動ピアノおよび演奏データ加工装置 |
| JPH0981125A (ja) * | 1995-09-19 | 1997-03-28 | Yamaha Corp | 自動ピアノ |
| JPH10177378A (ja) * | 1996-10-18 | 1998-06-30 | Yamaha Corp | 鍵盤用力覚制御装置、鍵盤用力覚制御方法および記憶媒体 |
| JP2003295863A (ja) * | 2002-04-03 | 2003-10-15 | Kawai Musical Instr Mfg Co Ltd | 鍵盤楽器の押鍵情報検出装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007199411A (ja) * | 2006-01-26 | 2007-08-09 | Yamaha Corp | 鍵盤楽器 |
| JP2007272198A (ja) * | 2006-03-08 | 2007-10-18 | Yamaha Corp | 鍵盤楽器 |
| JP2007264035A (ja) * | 2006-03-27 | 2007-10-11 | Yamaha Corp | 鍵盤楽器 |
| JP2009229640A (ja) * | 2008-03-21 | 2009-10-08 | Yamaha Corp | 電子楽器用力覚制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4670395B2 (ja) | 2011-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5162938B2 (ja) | 楽音発生装置及び鍵盤楽器 | |
| JP4193752B2 (ja) | 自動演奏ピアノ | |
| JP2010217267A (ja) | 鍵駆動装置、アップライト型自動演奏ピアノ及びプログラム | |
| JP4617921B2 (ja) | 楽器演奏の再生駆動装置、鍵盤楽器及び自動演奏ピアノ | |
| JPH0981125A (ja) | 自動ピアノ | |
| JP4967406B2 (ja) | 鍵盤楽器 | |
| JP4479554B2 (ja) | 鍵盤楽器 | |
| JP4134952B2 (ja) | 自動演奏ピアノ | |
| US8933309B2 (en) | Simulating muting in a drive control device for striking member in sound generation mechanism | |
| JP4548053B2 (ja) | 楽器の演奏駆動装置及び楽器の演奏操作子をフィードバック制御によって駆動するための方法及び該方法をコンピュータにより実行する制御プログラム。 | |
| JP4661143B2 (ja) | 楽器の演奏駆動装置及び楽器の演奏操作子をフィードバック制御によって駆動するための方法及び該方法をコンピュータにより実行する制御プログラム。 | |
| JP2005195773A (ja) | 演奏システム | |
| JP4687474B2 (ja) | 鍵盤楽器 | |
| JP4670395B2 (ja) | 自動ピアノ及び鍵を自動的に操作するためのプログラム | |
| US7235727B2 (en) | Automatic piano, and method and program for automatically operating a key | |
| JP3596015B2 (ja) | 自動ピアノ | |
| JP3541411B2 (ja) | 自動ピアノ | |
| JP5104928B2 (ja) | 演奏情報再生装置 | |
| JP5298437B2 (ja) | 鍵盤楽器 | |
| JP2014206577A (ja) | 鍵盤楽器 | |
| JP4815774B2 (ja) | 自動演奏楽器の演奏操作子の駆動装置及びその方法 | |
| JP5857564B2 (ja) | 音響効果付与装置およびピアノ | |
| JP5845752B2 (ja) | 音響効果付与装置およびピアノ | |
| JP2013061541A (ja) | 音響効果付与装置およびピアノ | |
| JP4232663B2 (ja) | 自動演奏楽器の演奏操作子の駆動装置及びその駆動方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080122 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100713 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100909 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101221 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110103 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140128 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |