JP2005201703A - 干渉測定方法及び干渉測定システム - Google Patents
干渉測定方法及び干渉測定システム Download PDFInfo
- Publication number
- JP2005201703A JP2005201703A JP2004006335A JP2004006335A JP2005201703A JP 2005201703 A JP2005201703 A JP 2005201703A JP 2004006335 A JP2004006335 A JP 2004006335A JP 2004006335 A JP2004006335 A JP 2004006335A JP 2005201703 A JP2005201703 A JP 2005201703A
- Authority
- JP
- Japan
- Prior art keywords
- interferometer
- test
- optical
- optical element
- respect
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Abstract
【課題】 光学的な手法により被検光学素子の傾きを高い精度で調整して、被検光学素子の透過波面収差を高い精度で測定することを可能にする干渉測定方法と干渉測定システムを提供する。
【解決手段】 干渉計Aの被検光束が基準平面部材Bに対し垂直入射するように、干渉計Aと基準平面部材Bとの相対位置を調整する。光学的傾き検出手段Cの被検光束が基準平面部材Bに対し垂直入射するように、光学的傾き検出手段Cと基準平面部材Bとの相対位置を調整する。基準平面部材Bを被検光学素子Dに置き換えた後、干渉計Aに対する被検光学素子Dの傾きを光学的傾き検出手段Cで検出する。その検出結果に基づいて干渉計Aに対する被検光学素子Dの傾きを調整した後、干渉計Aで被検光学素子Dの透過波面を測定する。
【選択図】 図2
【解決手段】 干渉計Aの被検光束が基準平面部材Bに対し垂直入射するように、干渉計Aと基準平面部材Bとの相対位置を調整する。光学的傾き検出手段Cの被検光束が基準平面部材Bに対し垂直入射するように、光学的傾き検出手段Cと基準平面部材Bとの相対位置を調整する。基準平面部材Bを被検光学素子Dに置き換えた後、干渉計Aに対する被検光学素子Dの傾きを光学的傾き検出手段Cで検出する。その検出結果に基づいて干渉計Aに対する被検光学素子Dの傾きを調整した後、干渉計Aで被検光学素子Dの透過波面を測定する。
【選択図】 図2
Description
本発明は干渉測定方法及び干渉測定システムに関するものであり、例えばレンズの透過波面を干渉計で測定するための干渉測定方法及び干渉測定システムに関するものである。
レンズ等の被検光学素子の性能を測定する方法として、干渉計と反射原器を用いて被検光学素子の透過波面を測定する方法が従来より知られている。例えば光ピックアップ用の対物レンズの場合、その透過波面の測定は以下のようにして行われる。まず、干渉計から射出させた平面波を光ピックアップ用の対物レンズに入射させる。すると、収差の非常に少ない球面波が対物レンズから射出される。その球面波を反射球面原器で折り返し、再び対物レンズに入射させる。対物レンズからは平面波が射出され、その平面波と干渉計内の参照面からの反射平面波とで干渉縞が形成される。その干渉縞から対物レンズの透過波面を測定することができる。また、参照面をピエゾ素子等で駆動させるフリンジスキャン法により、干渉縞を数値データに置き換えれば、透過波面収差を解析することができる。
透過波面測定のために干渉縞を得るには、干渉計に対する反射球面原器の位置を光軸方向及びそれに垂直な方向に調整するだけでなく、干渉計の光軸に対する被検光学素子の傾きも調整する必要がある。被検光学素子に傾き(いわゆるブロック偏芯)があると、その偏芯による収差が被検光学素子の透過波面収差に加わってしまい、被検光学素子の透過波面収差だけを測定することができなくなるからである。そのブロック偏芯を調整する方法としては、以下の2つの方法が知られている。
第1の方法は、保持ジグを用いた機械的な嵌め合いで被検光学素子を設置する機械的方法(例えば、特許文献1の第0011段落記載の芯取法等)であり、被検光学素子を保持する場所としては、外形,平面部,非球面部等が用いられる。第2の方法は、透過波面を測定するための干渉計から被検光学素子の平面部に光を入射させ、その反射波面を干渉計で観察しながら被検光学素子の傾きを調整する光学的方法である。
特開平10−232115号公報
しかし第1の方法の場合、機械的な嵌め合い精度での傾き調整となるため、光学的な第2の方法に比べて調整精度が低いという問題がある。第2の方法の場合、干渉計からの光を入射させる平面部が被検光学素子の光入射側になかったり、その平面部の面積が小さかったりすると、干渉縞が見えないため調整できないといった問題が生じてしまう。例えば光ピックアップ用対物レンズでは、近年の小型化の要求に応えるため光入射側に平面部を持たなかったり、平面部はあってもその面積が小さいといったことが多い。
本発明はこのような状況に鑑みてなされたものであって、その目的は、光学的な手法により被検光学素子の傾きを高い精度で調整して、被検光学素子の透過波面収差を高い精度で測定することを可能にする干渉測定方法と、それに用いる干渉測定システムを提供することにある。
上記目的を達成するために、第1の発明の干渉測定方法は、干渉計と光学的傾き検出手段とで互いの被検光束が平行になるように相対位置を調整し、前記干渉計に対する被検光学素子の傾きを前記光学的傾き検出手段で検出し、その検出結果に基づいて前記干渉計に対する被検光学素子の傾きを調整した後、前記干渉計で被検光学素子の透過波面を測定することを特徴とする。
第2の発明の干渉測定方法は、干渉計の被検光束が基準平面部材に対し垂直入射するように干渉計と基準平面部材との相対位置を調整し、光学的傾き検出手段の被検光束が前記基準平面部材に対し垂直入射するように光学的傾き検出手段と基準平面部材との相対位置を調整し、前記基準平面部材を被検光学素子に置き換えた後、前記干渉計に対する被検光学素子の傾きを前記光学的傾き検出手段で検出し、その検出結果に基づいて前記干渉計に対する被検光学素子の傾きを調整した後、前記干渉計で被検光学素子の透過波面を測定することを特徴とする。
第3の発明の干渉測定システムは、被検光学素子の透過波面を測定する干渉計と、その干渉計に対する被検光学素子の傾きを検出する光学的傾き検出手段と、を備えた干渉測定システムであって、前記干渉計と前記光学的傾き検出手段とで互いの被検光束が平行になるように相対位置が調整可能に構成されており、前記光学的傾き検出手段による検出結果に基づいて前記干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする。
第4の発明の干渉測定システムは、被検光学素子の透過波面を測定する干渉計と、その干渉計に対する被検光学素子の傾きを検出する光学的傾き検出手段と、前記干渉計と前記光学的傾き検出手段との相対位置の基準となる基準平面部材と、を備えた干渉測定システムであって、前記干渉計の被検光束が前記基準平面部材に対し垂直入射するように干渉計と基準平面部材との相対位置が調整可能に構成されており、前記光学的傾き検出手段の被検光束が前記基準平面部材に対し垂直入射するように光学的傾き検出手段と基準平面部材との相対位置が調整可能に構成されており、前記光学的傾き検出手段による検出結果に基づいて前記干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする。
第5の発明の干渉測定方法は、干渉計とオートコリメーターとで互いの被検光束が平行になるように相対位置を調整し、前記干渉計に対する被検光学素子の傾きを前記オートコリメーターで検出し、その検出結果に基づいて前記干渉計に対する被検光学素子の傾きを調整した後、前記干渉計で被検光学素子の透過波面を測定することを特徴とする。
第6の発明の干渉測定方法は、干渉計の被検光束がオプティカルパラレルに対し垂直入射するように干渉計とオプティカルパラレルとの相対位置を調整し、オートコリメーターの被検光束が前記オプティカルパラレルに対し垂直入射するようにオートコリメーターとオプティカルパラレルとの相対位置を調整し、前記オプティカルパラレルを被検光学素子に置き換えた後、前記干渉計に対する被検光学素子の傾きを前記オートコリメーターで検出し、その検出結果に基づいて前記干渉計に対する被検光学素子の傾きを調整した後、前記干渉計で被検光学素子の透過波面を測定することを特徴とする。
第7の発明の干渉測定システムは、被検光学素子の透過波面を測定する干渉計と、その干渉計に対する被検光学素子の傾きを検出するオートコリメーターと、を備えた干渉測定システムであって、前記干渉計と前記オートコリメーターとで互いの被検光束が平行になるように相対位置が調整可能に構成されており、前記オートコリメーターによる検出結果に基づいて前記干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする。
第8の発明の干渉測定システムは、被検光学素子の透過波面を測定する干渉計と、その干渉計に対する被検光学素子の傾きを検出するオートコリメーターと、前記干渉計と前記オートコリメーターとの相対位置の基準となるオプティカルパラレルと、を備えた干渉測定システムであって、前記干渉計の被検光束が前記オプティカルパラレルに対し垂直入射するように干渉計とオプティカルパラレルとの相対位置が調整可能に構成されており、前記オートコリメーターの被検光束が前記オプティカルパラレルに対し垂直入射するようにオートコリメーターとオプティカルパラレルとの相対位置が調整可能に構成されており、前記オートコリメーターによる検出結果に基づいて前記干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする。
第9の発明の干渉測定システムは、上記第7又は第8の発明において、被検光学素子が前記オートコリメーター側の面に平面部を有し、その平面部に前記オートコリメーターの被検光束を入射させて得られる反射光から、前記干渉計に対する被検光学素子の傾きを前記オートコリメーターで検出することを特徴とする。
第10の発明の干渉測定方法は、第1干渉計と第2干渉計とで互いの被検光束が平行になるように相対位置を調整し、前記第1干渉計に対する被検光学素子の傾きを前記第2干渉計で検出し、その検出結果に基づいて前記第1干渉計に対する被検光学素子の傾きを調整した後、前記第1干渉計で被検光学素子の透過波面を測定することを特徴とする。
第11の発明の干渉測定方法は、第1干渉計の被検光束がオプティカルパラレルに対し垂直入射するように第1干渉計とオプティカルパラレルとの相対位置を調整し、第2干渉計の被検光束が前記オプティカルパラレルに対し垂直入射するように第2干渉計とオプティカルパラレルとの相対位置を調整し、前記オプティカルパラレルを被検光学素子に置き換えた後、前記第1干渉計に対する被検光学素子の傾きを前記第2干渉計で検出し、その検出結果に基づいて前記第1干渉計に対する被検光学素子の傾きを調整した後、前記第1干渉計で被検光学素子の透過波面を測定することを特徴とする。
第12の発明の干渉測定システムは、被検光学素子の透過波面を測定する第1干渉計と、その第1干渉計に対する被検光学素子の傾きを検出する第2干渉計と、を備えた干渉測定システムであって、前記第1干渉計と前記第2干渉計とで互いの被検光束が平行になるように相対位置が調整可能に構成されており、前記第2干渉計による検出結果に基づいて前記第1干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする。
第13の発明の干渉測定システムは、被検光学素子の透過波面を測定する第1干渉計と、その第1干渉計に対する被検光学素子の傾きを検出する第2干渉計と、前記第1干渉計と前記第2干渉計との相対位置の基準となるオプティカルパラレルと、を備えた干渉測定システムであって、前記第1干渉計の被検光束が前記オプティカルパラレルに対し垂直入射するように第1干渉計とオプティカルパラレルとの相対位置が調整可能に構成されており、前記第2干渉計の被検光束が前記オプティカルパラレルに対し垂直入射するように第2干渉計とオプティカルパラレルとの相対位置が調整可能に構成されており、前記第2干渉計による検出結果に基づいて前記第1干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする。
第14の発明の干渉測定システムは、上記第12又は第13の発明において、被検光学素子が前記第2干渉計側の面に平面部を有し、その平面部に前記第2干渉計の被検光束を入射させて得られる反射光から、前記第1干渉計に対する被検光学素子の傾きを前記第2干渉計で検出することを特徴とする。
第15の発明の干渉測定システムは、上記第12又は第13の発明において、前記第2干渉計が非球面波発生光学素子を有し、被検光学素子が前記第2干渉計側の面に非球面部を有し、その非球面部に前記第2干渉計の被検光束を入射させて得られる反射光から、前記第1干渉計に対する被検光学素子の傾きを前記第2干渉計で検出することを特徴とする。
本発明によれば、光学的な手法により被検光学素子の傾きを高い精度で調整して、被検光学素子の透過波面収差を高い精度で測定することができる。
以下、本発明を実施した干渉測定方法及び干渉測定システムを、図面を参照しつつ説明する。なお、各実施の形態等の相互で同一の部分や相当する部分には同一の符号を付して重複説明を適宜省略する。
《干渉測定システムと干渉測定方法の基本構成(図1,図2)》
図1に、本発明に係る干渉測定システムの概略構成を示す。この干渉測定システムは、被検光学素子Dの透過波面を測定する干渉計Aと、被検光学素子Dを透過した被検光束を折り返して干渉計Aに再入射させるための反射原器Eと、干渉計Aに対する被検光学素子Dの傾きを光学的に検出する光学的傾き検出手段Cと、干渉計Aと光学的傾き検出手段Cとの相対位置の基準となる基準平面部材Bと、を備えている。干渉計Aと基準平面部材Bとの相対位置は、干渉計Aの被検光束が基準平面部材Bに対し垂直入射するように調整可能に構成されている。また、光学的傾き検出手段Cと基準平面部材Bとの相対位置は、光学的傾き検出手段Cの被検光束が基準平面部材Bに対し垂直入射するように調整可能に構成されている。したがって、干渉計Aと光学的傾き検出手段Cとで互いの被検光束が平行になるように相対位置を調整することが可能であり、光学的傾き検出手段Cによる検出結果に基づいて干渉計Aに対する被検光学素子Dの傾きを調整することが可能である。
図1に、本発明に係る干渉測定システムの概略構成を示す。この干渉測定システムは、被検光学素子Dの透過波面を測定する干渉計Aと、被検光学素子Dを透過した被検光束を折り返して干渉計Aに再入射させるための反射原器Eと、干渉計Aに対する被検光学素子Dの傾きを光学的に検出する光学的傾き検出手段Cと、干渉計Aと光学的傾き検出手段Cとの相対位置の基準となる基準平面部材Bと、を備えている。干渉計Aと基準平面部材Bとの相対位置は、干渉計Aの被検光束が基準平面部材Bに対し垂直入射するように調整可能に構成されている。また、光学的傾き検出手段Cと基準平面部材Bとの相対位置は、光学的傾き検出手段Cの被検光束が基準平面部材Bに対し垂直入射するように調整可能に構成されている。したがって、干渉計Aと光学的傾き検出手段Cとで互いの被検光束が平行になるように相対位置を調整することが可能であり、光学的傾き検出手段Cによる検出結果に基づいて干渉計Aに対する被検光学素子Dの傾きを調整することが可能である。
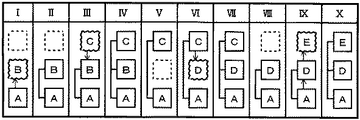
図2に、上記干渉測定システム(図1)を用いた干渉測定方法の概略構成を示す。まず、干渉計Aの被検光束が基準平面部材Bに対し垂直入射するように、干渉計Aと基準平面部材Bとの相対位置を調整する(I)。この相対位置調整において、基準平面部材Bに対する被検光束の入射が垂直か否かは、干渉計Aで検出可能である。なお、干渉計A,基準平面部材Bのいずれを移動させてもよいが、後述するオプティカルパラレル10(図3等)のように移動容易な基準平面部材Bを使用することが好ましい。
干渉計Aと基準平面部材Bとの相対位置調整が完了したら(II)、光学的傾き検出手段Cの被検光束が基準平面部材Bに対し垂直入射するように、光学的傾き検出手段Cと基準平面部材Bとの相対位置を調整する(III)。この相対位置調整において、基準平面部材Bに対する被検光束の入射が垂直か否かは、光学的傾き検出手段Cで検出可能である。この相対位置調整が完了すれば、干渉計A,基準平面部材B及び光学的傾き検出手段Cの相対位置調整が完了する(IV)。このとき、干渉計Aと光学的傾き検出手段Cとで互いの被検光束は平行になっている。
次に、基準平面部材Bを被検光学素子Dに置き換える(V〜VI)。干渉計Aに対する被検光学素子Dの傾きを光学的傾き検出手段Cで検出し、その検出結果に基づいて干渉計Aに対する被検光学素子Dの傾きを調整する(VI)。この傾き調整において、被検光学素子Dが干渉計Aに対して傾いているか否かは、光学的傾き検出手段Cで検出可能である。この傾き調整が完了すれば、干渉計A,被検光学素子D及び光学的傾き検出手段Cの相対位置調整が完了する(VII)。このとき、被検光学素子Dの傾きは光学的な手法により高い精度で調整されており、被検光学素子Dは干渉計Aに対しブロック偏芯の無い状態になっている。
被検光学素子Dは、光学的傾き検出手段C側(つまり干渉計Aとは反対側)の面に平面部を有することが好ましい。透過波面が測定される被検光学素子Dは、その干渉計A側の面に平面部を有する余裕が少ないのに対し、干渉計Aの反対側の面には平面部を有する余裕がある。したがって、干渉計Aとは反対側の面の平面部に光学的傾き検出手段Cの被検光束を入射させ、得られる反射光から干渉計Aに対する被検光学素子Dの傾きを光学的傾き検出手段Cで検出するのが好ましい。
被検光学素子Dが光学的傾き検出手段C側(つまり干渉計Aとは反対側)の面に非球面部を有する場合には、光学的傾き検出手段Cが非球面波発生光学素子を有することが好ましい。非球面波発生光学素子で平面波を非球面波に変換すれば、干渉計Aとは反対側の面に平面部を持たない被検光学素子Dにも対応することが可能となる。したがって、干渉計Aとは反対側の面の非球面部に光学的傾き検出手段Cの被検光束を入射させ、得られる反射光から干渉計Aに対する被検光学素子Dの傾きを光学的傾き検出手段Cで検出するのが好ましい。
次に、光学的傾き検出手段Cを反射原器Eに置き換えて、干渉計A及び被検光学素子Dに対する反射原器Eの相対位置を調整する(VIII〜IX)。この相対位置調整において、反射原器Eの相対位置が適正であるか否かは、干渉計Aで検出可能である。反射原器Eの相対位置調整が完了したら、干渉計Aで被検光学素子Dの透過波面を測定する(X)。被検光学素子Dはブロック偏芯の無い状態にあるため、被検光学素子Dのみの透過波面収差を測定することが可能である。したがって、被検光学素子Dの透過波面収差を高い精度で測定することができる。
上述した干渉測定方法及び干渉測定システムにおいて、各要素が更に具体化された第1〜第6の実施の形態を以下に説明する。第1〜第6の実施の形態では、基準平面部材Bとしてオプティカルパラレル10、被検光学素子Dとしてレンズ11、反射原器Eとして反射球面原器12を採用している。また第1,第2,第5,第6の実施の形態ではトワイマン・グリーン型の干渉計A1、第3,第4の実施の形態ではフィゾー型の干渉計A2を、それぞれ干渉計Aとして採用している。第1〜第4の実施の形態ではオートコリメーター9、第5,第6の実施の形態ではフィゾー型の干渉計C1,C2を、それぞれ光学的傾き検出手段Cとして採用している。
《第1,第2の実施の形態(図3〜図6)》
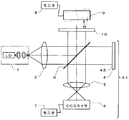
第1,第2の実施の形態の干渉測定システムは、レンズ11の透過波面を測定するトワイマン・グリーン型の干渉計A1、その干渉計A1に対するレンズ11の傾きをレーザビームで検出するオートコリメーター9、干渉計A1とオートコリメーター9との相対位置の基準となるオプティカルパラレル10、反射球面原器12等を備えている。干渉計A1は、光源ユニット1,コリメータレンズ2,所定波長の光に対してハーフミラーとして機能するビームスプリッタ3,反射平面原器4(4S:参照平面),結像レンズ5,干渉縞観察用の撮像素子(CCDカメラ)6,モニタ7等を備えている。光源ユニット1は、レンズ11の使用波長のレーザビームを発振するLD(laser diode)素子,コリメータレンズ,収束レンズ,スペイシャルフィルター等を内蔵しており、ブロック偏芯調整用のオートコリメーター9にはモニタ8が接続されている。なお、オートコリメーター9は、被検物に被検光を照射し、被検物からの反射光の角度に基づいて被検物の傾きを測定する装置である。このオートコリメーター9としては、例えば、小径のレーザビームを被検光束として射出するレーザーオートコリメーターを使用するのが好ましい。
第1,第2の実施の形態の干渉測定システムは、レンズ11の透過波面を測定するトワイマン・グリーン型の干渉計A1、その干渉計A1に対するレンズ11の傾きをレーザビームで検出するオートコリメーター9、干渉計A1とオートコリメーター9との相対位置の基準となるオプティカルパラレル10、反射球面原器12等を備えている。干渉計A1は、光源ユニット1,コリメータレンズ2,所定波長の光に対してハーフミラーとして機能するビームスプリッタ3,反射平面原器4(4S:参照平面),結像レンズ5,干渉縞観察用の撮像素子(CCDカメラ)6,モニタ7等を備えている。光源ユニット1は、レンズ11の使用波長のレーザビームを発振するLD(laser diode)素子,コリメータレンズ,収束レンズ,スペイシャルフィルター等を内蔵しており、ブロック偏芯調整用のオートコリメーター9にはモニタ8が接続されている。なお、オートコリメーター9は、被検物に被検光を照射し、被検物からの反射光の角度に基づいて被検物の傾きを測定する装置である。このオートコリメーター9としては、例えば、小径のレーザビームを被検光束として射出するレーザーオートコリメーターを使用するのが好ましい。
干渉計A1とオプティカルパラレル10との相対位置は、干渉計A1の被検光束がオプティカルパラレル10に対し垂直入射するように調整可能に構成されており、オートコリメーター9とオプティカルパラレル10との相対位置は、オートコリメーター9の被検光束がオプティカルパラレル10に対し垂直入射するように調整可能に構成されている。したがって、干渉計A1とオートコリメーター9とで互いの被検光束が平行になるように相対位置を調整することが可能であり、オートコリメーター9による検出結果に基づいて干渉計A1に対するレンズ11の傾きを調整することが可能である。
第1,第2の実施の形態の干渉測定方法では、図3に示すように、干渉計A1とオートコリメーター9とで互いの被検光束が平行になるように相対位置を調整する。そのためには、まず干渉計A1の被検光束がオプティカルパラレル10に対し垂直入射するように、干渉計A1とオプティカルパラレル10との相対位置を調整する。つまり、干渉計A1にオプティカルパラレル10を設置し、オプティカルパラレル10の傾きを調整して干渉縞をワンカラーに合わせることにより、干渉計A1からの被検光束がオプティカルパラレル10に対し垂直に入射する状態とする。この状態はモニタ7で確認可能である。
次に、オートコリメーター9の被検光束がオプティカルパラレル10に対し垂直入射するように、オートコリメーター9とオプティカルパラレル10との相対位置を調整する。つまり、オートコリメーター9からのレーザビームをオプティカルパラレル10に照射し、オートコリメーター9の傾きを調整して入射光と反射光とで光路を一致させることにより、オートコリメーター9の被検光束がオプティカルパラレル10に対し垂直に入射する状態とする。この状態はモニタ8で確認可能である。なお、干渉計A1とオートコリメーター9との間での被検光束の傾き角度は、オートコリメーター9とオプティカルパラレル10の精度にもよるが、数秒以内で調整可能である。
次に、オプティカルパラレル10を干渉計A1から取り外して、図4,図5に示すように、被検光学素子Dであるレンズ11をセットする。そして、干渉計A1に対するレンズ11の傾きをオートコリメーター9で検出し、その検出結果に基づいて干渉計A1に対するレンズ11の傾きを調整する。レンズ11はオートコリメーター9側の面に平面部11Sを有しており、その平面部11Sにオートコリメーター9の被検光束を入射させて得られる反射光から、干渉計A1に対するレンズ11の傾き(すなわちレンズ光軸の傾き)をオートコリメーター9で検出する。
オートコリメーター9からの被検光束は、第1の施の形態(図4)ではレンズ11の平面部11Sの一部に(ビームを細く絞った状態で)照射され、第2の施の形態(図5)ではレンズ11の平面部11Sの全体に照射される。太い被検光束の方が傾きの検出精度が良いので、図5に示すようにレンズ径とほぼ同じ又はそれ以上の径(例えばφ3mm程度)の平行ビームを用いるのが好ましい。また第2の施の形態の場合、被検光束は平面部11Sに対応したドーナツ状であるのが好ましいが、被検光束の一部がレンズ曲面に入射しても、その反射光線がオートコリメーター9に戻ることはないので、被検光束はドーナツ状でなくてもよい。
先に干渉計A1とオートコリメーター9との相対位置調整が完了しているため、干渉計A1に対するレンズ11の傾き調整が完了すれば、レンズ11は干渉計A1に対しブロック偏芯の無い状態(つまり干渉計A1とレンズ11とで光軸が平行になるように調整された状態)となる。この状態でレンズ11の透過波面を干渉計A1により測定する。ブロック偏芯の影響がないので、レンズ11の透過波面収差のみを知ることができる。
干渉計A1によるレンズ11の透過波面の測定は以下のようにして行う。まず、オートコリメーター9を干渉計A1から取り外して、図6に示すように、反射球面原器12をセットする。干渉計A1及びレンズ11に対する反射球面原器12の相対位置を調整した後、光源ユニット1から所定波長のレーザビームを放射させる。レーザビームはコリメータレンズ2で平行光束となり、ビームスプリッタ3で反射光束と透過光束とに分割される。そのうち、反射光束は透過波面測定用の被検光束としてレンズ11に入射し、透過光束は参照光束として反射平面原器4の参照平面4Sで折り返される。レンズ11が設計値どおりに作製されていれば、被検光束はレンズ11を通過し、反射球面原器12の反射球面12Sで反射され、入射してきた光路を逆に進行してレンズ11を再び通過した後、ビームスプリッタ3に再入射する。ビームスプリッタ3に再入射した被検光束は反射光束と透過光束とに分割され、そのうちの透過光束が結像レンズ5を経て撮像素子6に至る。参照平面4Sで反射した参照光束は、同様にビームスプリッタ3に再入射して反射光束と透過光束とに分割され、そのうちの反射光束が結像レンズ5を経て撮像素子6に至る。
被検光束中ではレンズ11によって波面に変形が生じるため、撮像素子6上では被検光束と参照光束とが相互に干渉して干渉縞を形成する。その干渉縞を解析することによりレンズ11の透過波面形状を測定することができる。なお、反射球面原器12が適正位置にあるか否かは、干渉計A1で検出される干渉縞から判断可能である。適正位置では反射球面12Sの球心でレーザビームが結像するため光線は同一光路を往復することになるが、不適正な位置では、反射した光線が異なった光路でレンズ11に再入射することになるからである。
さらに、得られた透過波面の形状をゼルニケ多項式等でフィッティングし、コマ成分を解析することにより、レンズ11の面別平行偏芯及び面別傾き偏芯を算出することも可能である。ブロック偏芯が発生していると、主にそのコマ成分となるので、レンズ11の面別平行偏芯及び面別傾き偏芯を算出するためには、ブロック偏芯の影響を除去することが必要不可欠となる。そして、算出されたレンズ11の面別平行偏芯量及び面別傾き偏芯量を成形機にフィードバックすることで、偏芯の小さいレンズを得ることが可能となる。
《第3,第4の実施の形態(図7〜図10)》
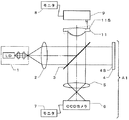
第3,第4の実施の形態の干渉測定システムは、レンズ11の透過波面を測定するフィゾー型の干渉計A2、その干渉計A2に対するレンズ11の傾きをレーザビームで検出するオートコリメーター9、干渉計A2とオートコリメーター9との相対位置の基準となるオプティカルパラレル10、反射球面原器12等を備えている。干渉計A2は、光源ユニット1,コリメータレンズ2,所定波長の光に対してハーフミラーとして機能するビームスプリッタ3,透過平面原器13(13S:参照平面),結像レンズ5,干渉縞観察用の撮像素子(CCDカメラ)6,モニタ7等を備えている。光源ユニット1は、レンズ11の使用波長のレーザビームを発振するLD素子,コリメータレンズ,収束レンズ,スペイシャルフィルター等を内蔵しており、ブロック偏芯調整用のオートコリメーター9にはモニタ8が接続されている。なお、オートコリメーター9としては、例えば、小径のレーザビームを被検光束として射出するレーザーオートコリメーターを使用するのが好ましい。
第3,第4の実施の形態の干渉測定システムは、レンズ11の透過波面を測定するフィゾー型の干渉計A2、その干渉計A2に対するレンズ11の傾きをレーザビームで検出するオートコリメーター9、干渉計A2とオートコリメーター9との相対位置の基準となるオプティカルパラレル10、反射球面原器12等を備えている。干渉計A2は、光源ユニット1,コリメータレンズ2,所定波長の光に対してハーフミラーとして機能するビームスプリッタ3,透過平面原器13(13S:参照平面),結像レンズ5,干渉縞観察用の撮像素子(CCDカメラ)6,モニタ7等を備えている。光源ユニット1は、レンズ11の使用波長のレーザビームを発振するLD素子,コリメータレンズ,収束レンズ,スペイシャルフィルター等を内蔵しており、ブロック偏芯調整用のオートコリメーター9にはモニタ8が接続されている。なお、オートコリメーター9としては、例えば、小径のレーザビームを被検光束として射出するレーザーオートコリメーターを使用するのが好ましい。
干渉計A2とオプティカルパラレル10との相対位置は、干渉計A2の被検光束がオプティカルパラレル10に対し垂直入射するように調整可能に構成されており、オートコリメーター9とオプティカルパラレル10との相対位置は、オートコリメーター9の被検光束がオプティカルパラレル10に対し垂直入射するように調整可能に構成されている。したがって、干渉計A2とオートコリメーター9とで互いの被検光束が平行になるように相対位置を調整することが可能であり、オートコリメーター9による検出結果に基づいて干渉計A2に対するレンズ11の傾きを調整することが可能である。
第3,第4の実施の形態の干渉測定方法では、図7に示すように、干渉計A2とオートコリメーター9とで互いの被検光束が平行になるように相対位置を調整する。そのためには、まず干渉計A2の被検光束がオプティカルパラレル10に対し垂直入射するように、干渉計A2とオプティカルパラレル10との相対位置を調整する。つまり、干渉計A2にオプティカルパラレル10を設置し、オプティカルパラレル10の傾きを調整して干渉縞をワンカラーに合わせることにより、干渉計A2からの被検光束がオプティカルパラレル10に対し垂直に入射する状態とする。この状態はモニタ7で確認可能である。
次に、オートコリメーター9の被検光束がオプティカルパラレル10に対し垂直入射するように、オートコリメーター9とオプティカルパラレル10との相対位置を調整する。つまり、オートコリメーター9からのレーザビームをオプティカルパラレル10に照射し、オートコリメーター9の傾きを調整して入射光と反射光とで光路を一致させることにより、オートコリメーター9の被検光束がオプティカルパラレル10に対し垂直に入射する状態とする。この状態はモニタ8で確認可能である。なお、干渉計A2とオートコリメーター9との間での被検光束の傾き角度は、オートコリメーター9とオプティカルパラレル10の精度にもよるが、数秒以内で調整可能である。
次に、オプティカルパラレル10を干渉計A2から取り外して、図8,図9に示すように、被検光学素子Dであるレンズ11をセットする。そして、干渉計A2に対するレンズ11の傾きをオートコリメーター9で検出し、その検出結果に基づいて干渉計A2に対するレンズ11の傾きを調整する。レンズ11はオートコリメーター9側の面に平面部11Sを有しており、その平面部11Sにオートコリメーター9の被検光束を入射させて得られる反射光から、干渉計A2に対するレンズ11の傾き(すなわちレンズ光軸の傾き)をオートコリメーター9で検出する。
オートコリメーター9からの被検光束は、第3の施の形態(図8)ではレンズ11の平面部11Sの一部に(ビームを細く絞った状態で)照射され、第4の施の形態(図9)ではレンズ11の平面部11Sの全体に照射される。太い被検光束の方が傾きの検出精度が良いので、図9に示すようにレンズ径とほぼ同じ又はそれ以上の径(例えばφ3mm程度)の平行ビームを用いるのが好ましい。また第4の施の形態の場合、被検光束は平面部11Sに対応したドーナツ状であるのが好ましいが、被検光束の一部がレンズ曲面に入射しても、その反射光線がオートコリメーター9に戻ることはないので、被検光束はドーナツ状でなくてもよい。
先に干渉計A2とオートコリメーター9との相対位置調整が完了しているため、干渉計A2に対するレンズ11の傾き調整が完了すれば、レンズ11は干渉計A2に対しブロック偏芯の無い状態(つまり干渉計A2とレンズ11とで光軸が平行になるように調整された状態)となる。この状態でレンズ11の透過波面を干渉計A2により測定する。ブロック偏芯の影響がないので、レンズ11の透過波面収差のみを知ることができる。
干渉計A2によるレンズ11の透過波面の測定は以下のようにして行う。まず、オートコリメーター9を干渉計A2から取り外して、図10に示すように、反射球面原器12をセットする。干渉計A2及びレンズ11に対する反射球面原器12の相対位置を調整した後、光源ユニット1から所定波長のレーザビームを放射させる。レーザビームはコリメータレンズ2で平行光束となり、ビームスプリッタ3で反射光束と透過光束とに分割され、そのうちの反射光束のみが用いられる。ビームスプリッタ3からの反射光束は、透過平面原器13を通過する透過波面測定用の被検光束と、透過平面原器13の参照平面13Sでの反射により折り返される参照光束と、に分けられる。レンズ11が設計値どおりに作製されていれば、被検光束はレンズ11を通過し、反射球面原器12の反射球面12Sで反射され、入射してきた光路を逆に進行してレンズ11と透過平面原器13を再び通過した後、ビームスプリッタ3に再入射する。ビームスプリッタ3に再入射した被検光束は反射光束と透過光束とに分割され、そのうちの透過光束が結像レンズ5を経て撮像素子6に至る。参照平面13Sで反射した参照光束は、同様にビームスプリッタ3に再入射して反射光束と透過光束とに分割され、そのうちの透過光束が結像レンズ5を経て撮像素子6に至る。
被検光束中ではレンズ11によって波面に変形が生じるため、撮像素子6上では被検光束と参照光束とが相互に干渉して干渉縞を形成する。その干渉縞を解析することによりレンズ11の透過波面形状を測定することができる。なお、反射球面原器12が適正位置にあるか否かは、干渉計A2で検出される干渉縞から判断可能である。適正位置では反射球面12Sの球心でレーザビームが結像するため光線は同一光路を往復することになるが、不適正な位置では、反射した光線が異なった光路でレンズ11に再入射することになるからである。
さらに、得られた透過波面の形状をゼルニケ多項式等でフィッティングし、コマ成分を解析することにより、レンズ11の面別平行偏芯及び面別傾き偏芯を算出することも可能である。ブロック偏芯が発生していると、主にそのコマ成分となるので、レンズ11の面別平行偏芯及び面別傾き偏芯を算出するためには、ブロック偏芯の影響を除去することが必要不可欠となる。そして、算出されたレンズ11の面別平行偏芯量及び面別傾き偏芯量を成形機にフィードバックすることで、偏芯の小さいレンズを得ることが可能となる。
《第5,第6の実施の形態(図11,図12)》
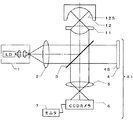
第5,第6の実施の形態の干渉測定システムは2つの干渉計を備えている。つまり、透過波面測定用の第1干渉計としてトワイマン・グリーン型の干渉計A1(第1,第2の実施の形態と同様のもの)を備えており、ブロック偏芯を高精度で調整するための第2干渉計(光学的傾き検出手段Cに相当する。)としてフィゾー型の干渉計C1又はC2を備えている。干渉計C1,C2は、光源ユニット21,コリメータレンズ22,所定波長の光に対してハーフミラーとして機能するビームスプリッタ23,結像レンズ25,干渉縞観察用の撮像素子(CCDカメラ)26,モニタ27等を備えており、光源ユニット21は、レンズ11の使用波長のレーザビームを発振するLD素子,コリメータレンズ,収束レンズ,スペイシャルフィルター等を備えている。
第5,第6の実施の形態の干渉測定システムは2つの干渉計を備えている。つまり、透過波面測定用の第1干渉計としてトワイマン・グリーン型の干渉計A1(第1,第2の実施の形態と同様のもの)を備えており、ブロック偏芯を高精度で調整するための第2干渉計(光学的傾き検出手段Cに相当する。)としてフィゾー型の干渉計C1又はC2を備えている。干渉計C1,C2は、光源ユニット21,コリメータレンズ22,所定波長の光に対してハーフミラーとして機能するビームスプリッタ23,結像レンズ25,干渉縞観察用の撮像素子(CCDカメラ)26,モニタ27等を備えており、光源ユニット21は、レンズ11の使用波長のレーザビームを発振するLD素子,コリメータレンズ,収束レンズ,スペイシャルフィルター等を備えている。
第5の実施の形態(図11)では、第2干渉計C1に透過平面原器13(13S:参照平面)が設置されており、レンズ11の平面部11Sでの反射波面を干渉縞として観察することによりブロック偏芯の調整を行う構成になっている。一方、第6の実施の形態(図12)では、第2干渉計C2にゾーンプレート33(33S:参照平面)が(回折作用により非球面波を発生させる光学素子として)設置されており、レンズ11の非球面部11Rでの反射波面を干渉縞として観察することによりブロック偏芯の調整を行う構成になっている。なお、第2干渉計C1の基本構成は前記干渉計A2と同様であり、第2干渉計C1において透過平面原器13の代わりにゾーンプレート33を設けたのが第2干渉計C2である。
干渉計A1とオプティカルパラレル10との相対位置は、干渉計A1の被検光束がオプティカルパラレル10に対し垂直入射するように調整可能に構成されており、干渉計C1又はC2とオプティカルパラレル10との相対位置は、干渉計C1又はC2の被検光束がオプティカルパラレル10に対し垂直入射するように調整可能に構成されている。したがって、干渉計A1と干渉計C1又はC2とで互いの被検光束が平行になるように相対位置を調整することが可能であり、干渉計C1又はC2による検出結果に基づいて干渉計A1に対するレンズ11の傾きを調整することが可能である。
第5,第6の実施の形態の干渉測定方法では、干渉計A1と干渉計C1又はC2とで互いの被検光束が平行になるように相対位置を調整する。そのためには、まず干渉計A1の被検光束がオプティカルパラレル10に対し垂直入射するように、干渉計A1とオプティカルパラレル10との相対位置を調整する。つまり、干渉計A1にオプティカルパラレル10を設置し、オプティカルパラレル10の傾きを調整して干渉縞をワンカラーに合わせることにより、干渉計A1からの被検光束がオプティカルパラレル10に対し垂直に入射する状態とする。この状態はモニタ7で確認可能である。
次に、干渉計C1又はC2の被検光束がオプティカルパラレル10に対し垂直入射するように、干渉計C1又はC2とオプティカルパラレル10との相対位置を調整する。つまり、干渉計C1又はC2からのレーザビームをオプティカルパラレル10に照射し、干渉計C1又はC2の傾きを調整して入射光と反射光とで光路を一致させることにより、干渉計C1又はC2の被検光束がオプティカルパラレル10に対し垂直に入射する状態とする。この状態はモニタ27で確認可能である。なお、干渉計A1と干渉計C1又はC2との間での被検光束の傾き角度は、干渉計C1又はC2とオプティカルパラレル10の精度にもよるが、数秒以内で調整可能である。
干渉計C1又はC2とオプティカルパラレル10との相対位置の検出は、以下のようにして行う。まず、光源ユニット21から所定波長のレーザビームを放射させる。レーザビームはコリメータレンズ22で平行光束となり、ビームスプリッタ23で反射光束と透過光束とに分割され、そのうちの透過光束のみが用いられる。第5の実施の形態(図11)では、ビームスプリッタ23から射出した透過光束は、透過平面原器13を通過する被検光束と、透過平面原器13の参照平面13Sでの反射により折り返される参照光束と、に分けられる。第6の実施の形態(図12)では、ビームスプリッタ23から射出した透過光束は、ゾーンプレート33を通過する被検光束(0次の透過光)と、ゾーンプレート33の参照平面33Sでの反射により折り返される参照光束(0次の反射光)と、に分けられる。
被検光束はオプティカルパラレル10で反射され、入射してきた光路を逆に進行してビームスプリッタ3に再入射する。ビームスプリッタ3に再入射した被検光束は反射光束と透過光束とに分割され、そのうちの反射光束が結像レンズ25を経て撮像素子26に至る。参照平面13S又は33Sで反射した参照光束は、同様にビームスプリッタ23に再入射して反射光束と透過光束とに分割され、そのうちの反射光束が結像レンズ25を経て撮像素子26に至る。被検光束中ではオプティカルパラレル10によって波面に変形が生じるため、撮像素子26上では被検光束と参照光束とが相互に干渉して干渉縞を形成する。その干渉縞を解析することにより干渉計C1又はC2とオプティカルパラレル10との相対位置を検出することができる。
次に、オプティカルパラレル10を干渉計A1から取り外して、被検光学素子Dであるレンズ11をセットする。そして、干渉計A1に対するレンズ11の傾きを干渉計C1又はC2で検出し、その検出結果に基づいて干渉計A1に対するレンズ11の傾きを調整する。その際のレンズ11の傾き検出は、以下のようにして行う。まず、光源ユニット21から所定波長のレーザビームを放射させる。レーザビームはコリメータレンズ22で平行光束となり、ビームスプリッタ23で反射光束と透過光束とに分割され、そのうちの透過光束のみが用いられる。第5の実施の形態(図11)では、ビームスプリッタ23から射出した透過光束は、透過平面原器13を通過する被検光束と、透過平面原器13の参照平面13Sでの反射により折り返される参照光束と、に分けられる。第6の実施の形態(図12)では、ビームスプリッタ23から射出した透過光束は、ゾーンプレート33を通過する被検光束(1次の透過光)と、ゾーンプレート33の参照平面33Sでの反射により折り返される参照光束(0次の反射光)と、に分けられる。
被検光束はレンズ11の平面部11S又は非球面部11Rで反射され、入射してきた光路を逆に進行してビームスプリッタ3に再入射する。ビームスプリッタ3に再入射した被検光束は反射光束と透過光束とに分割され、そのうちの反射光束が結像レンズ25を経て撮像素子26に至る。参照平面13S又は33Sで反射した参照光束は、同様にビームスプリッタ23に再入射して反射光束と透過光束とに分割され、そのうちの反射光束が結像レンズ25を経て撮像素子26に至る。被検光束中ではレンズ11の平面部11S又は非球面部11Rによって波面に変形が生じるため、撮像素子26上では被検光束と参照光束とが相互に干渉して干渉縞を形成する。その干渉縞を解析することにより干渉計A1に対するレンズ11の傾きを検出することができる。
上記のように、レンズ11は干渉計C1又はC2側の面に平面部11Sを有しているので、第5の実施の形態では、その平面部11Sに干渉計C1の被検光束を入射させて得られる反射光から、干渉計A1に対するレンズ11の傾き(すなわちレンズ光軸の傾き)を干渉計C1で検出する構成としている。また、レンズ11は干渉計C2側の面に非球面部11Rを有しているので、第6の実施の形態では、非球面部11Rに対応した非球面波を発生させるゾーンプレート33を干渉計C2に備えることにより、非球面部11Rに干渉計C2の被検光束を入射させて得られる反射光から、干渉計A1に対するレンズ11の傾き(すなわちレンズ光軸の傾き)を干渉計C2で検出する構成としている。
先に干渉計A1と干渉計C1又はC2との相対位置調整が完了しているため、干渉計A1に対するレンズ11の傾き調整が完了すれば、レンズ11は干渉計A1に対しブロック偏芯の無い状態(つまり干渉計A1とレンズ11とで光軸が平行になるように調整された状態)となる。この状態でレンズ11の透過波面を干渉計A1により測定する。ブロック偏芯の影響がないので、レンズ11の透過波面収差のみを知ることができる。干渉計A1によるレンズ11の透過波面の測定は、干渉計C1又はC2を干渉計A1から取り外した後、前述の第1,第2の実施の形態と同様に行う。
A 干渉計
B 基準平面部材
C 光学的傾き検出手段
D 被検光学素子
E 反射原器
A1 トワイマン・グリーン型の干渉計(第1干渉計)
A2 フィゾー型の干渉計
C1,C2 フィゾー型の干渉計(第2干渉計)
4 反射平面原器
4S 参照平面
9 オートコリメーター(光学的傾き検出手段)
10 オプティカルパラレル(基準平面部材)
11 レンズ(被検光学素子)
11S 平面部
11R 非球面部
12 反射球面原器
12S 反射球面
13 透過平面原器
13S 参照平面
33 ゾーンプレート(非球面波発生光学素子)
33S 参照平面
B 基準平面部材
C 光学的傾き検出手段
D 被検光学素子
E 反射原器
A1 トワイマン・グリーン型の干渉計(第1干渉計)
A2 フィゾー型の干渉計
C1,C2 フィゾー型の干渉計(第2干渉計)
4 反射平面原器
4S 参照平面
9 オートコリメーター(光学的傾き検出手段)
10 オプティカルパラレル(基準平面部材)
11 レンズ(被検光学素子)
11S 平面部
11R 非球面部
12 反射球面原器
12S 反射球面
13 透過平面原器
13S 参照平面
33 ゾーンプレート(非球面波発生光学素子)
33S 参照平面
Claims (15)
- 干渉計と光学的傾き検出手段とで互いの被検光束が平行になるように相対位置を調整し、前記干渉計に対する被検光学素子の傾きを前記光学的傾き検出手段で検出し、その検出結果に基づいて前記干渉計に対する被検光学素子の傾きを調整した後、前記干渉計で被検光学素子の透過波面を測定することを特徴とする干渉測定方法。
- 干渉計の被検光束が基準平面部材に対し垂直入射するように干渉計と基準平面部材との相対位置を調整し、光学的傾き検出手段の被検光束が前記基準平面部材に対し垂直入射するように光学的傾き検出手段と基準平面部材との相対位置を調整し、前記基準平面部材を被検光学素子に置き換えた後、前記干渉計に対する被検光学素子の傾きを前記光学的傾き検出手段で検出し、その検出結果に基づいて前記干渉計に対する被検光学素子の傾きを調整した後、前記干渉計で被検光学素子の透過波面を測定することを特徴とする干渉測定方法。
- 被検光学素子の透過波面を測定する干渉計と、その干渉計に対する被検光学素子の傾きを検出する光学的傾き検出手段と、を備えた干渉測定システムであって、前記干渉計と前記光学的傾き検出手段とで互いの被検光束が平行になるように相対位置が調整可能に構成されており、前記光学的傾き検出手段による検出結果に基づいて前記干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする干渉測定システム。
- 被検光学素子の透過波面を測定する干渉計と、その干渉計に対する被検光学素子の傾きを検出する光学的傾き検出手段と、前記干渉計と前記光学的傾き検出手段との相対位置の基準となる基準平面部材と、を備えた干渉測定システムであって、前記干渉計の被検光束が前記基準平面部材に対し垂直入射するように干渉計と基準平面部材との相対位置が調整可能に構成されており、前記光学的傾き検出手段の被検光束が前記基準平面部材に対し垂直入射するように光学的傾き検出手段と基準平面部材との相対位置が調整可能に構成されており、前記光学的傾き検出手段による検出結果に基づいて前記干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする干渉測定システム。
- 干渉計とオートコリメーターとで互いの被検光束が平行になるように相対位置を調整し、前記干渉計に対する被検光学素子の傾きを前記オートコリメーターで検出し、その検出結果に基づいて前記干渉計に対する被検光学素子の傾きを調整した後、前記干渉計で被検光学素子の透過波面を測定することを特徴とする干渉測定方法。
- 干渉計の被検光束がオプティカルパラレルに対し垂直入射するように干渉計とオプティカルパラレルとの相対位置を調整し、オートコリメーターの被検光束が前記オプティカルパラレルに対し垂直入射するようにオートコリメーターとオプティカルパラレルとの相対位置を調整し、前記オプティカルパラレルを被検光学素子に置き換えた後、前記干渉計に対する被検光学素子の傾きを前記オートコリメーターで検出し、その検出結果に基づいて前記干渉計に対する被検光学素子の傾きを調整した後、前記干渉計で被検光学素子の透過波面を測定することを特徴とする干渉測定方法。
- 被検光学素子の透過波面を測定する干渉計と、その干渉計に対する被検光学素子の傾きを検出するオートコリメーターと、を備えた干渉測定システムであって、前記干渉計と前記オートコリメーターとで互いの被検光束が平行になるように相対位置が調整可能に構成されており、前記オートコリメーターによる検出結果に基づいて前記干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする干渉測定システム。
- 被検光学素子の透過波面を測定する干渉計と、その干渉計に対する被検光学素子の傾きを検出するオートコリメーターと、前記干渉計と前記オートコリメーターとの相対位置の基準となるオプティカルパラレルと、を備えた干渉測定システムであって、前記干渉計の被検光束が前記オプティカルパラレルに対し垂直入射するように干渉計とオプティカルパラレルとの相対位置が調整可能に構成されており、前記オートコリメーターの被検光束が前記オプティカルパラレルに対し垂直入射するようにオートコリメーターとオプティカルパラレルとの相対位置が調整可能に構成されており、前記オートコリメーターによる検出結果に基づいて前記干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする干渉測定システム。
- 被検光学素子が前記オートコリメーター側の面に平面部を有し、その平面部に前記オートコリメーターの被検光束を入射させて得られる反射光から、前記干渉計に対する被検光学素子の傾きを前記オートコリメーターで検出することを特徴とする請求項7又は8記載の干渉測定システム。
- 第1干渉計と第2干渉計とで互いの被検光束が平行になるように相対位置を調整し、前記第1干渉計に対する被検光学素子の傾きを前記第2干渉計で検出し、その検出結果に基づいて前記第1干渉計に対する被検光学素子の傾きを調整した後、前記第1干渉計で被検光学素子の透過波面を測定することを特徴とする干渉測定方法。
- 第1干渉計の被検光束がオプティカルパラレルに対し垂直入射するように第1干渉計とオプティカルパラレルとの相対位置を調整し、第2干渉計の被検光束が前記オプティカルパラレルに対し垂直入射するように第2干渉計とオプティカルパラレルとの相対位置を調整し、前記オプティカルパラレルを被検光学素子に置き換えた後、前記第1干渉計に対する被検光学素子の傾きを前記第2干渉計で検出し、その検出結果に基づいて前記第1干渉計に対する被検光学素子の傾きを調整した後、前記第1干渉計で被検光学素子の透過波面を測定することを特徴とする干渉測定方法。
- 被検光学素子の透過波面を測定する第1干渉計と、その第1干渉計に対する被検光学素子の傾きを検出する第2干渉計と、を備えた干渉測定システムであって、前記第1干渉計と前記第2干渉計とで互いの被検光束が平行になるように相対位置が調整可能に構成されており、前記第2干渉計による検出結果に基づいて前記第1干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする干渉測定システム。
- 被検光学素子の透過波面を測定する第1干渉計と、その第1干渉計に対する被検光学素子の傾きを検出する第2干渉計と、前記第1干渉計と前記第2干渉計との相対位置の基準となるオプティカルパラレルと、を備えた干渉測定システムであって、前記第1干渉計の被検光束が前記オプティカルパラレルに対し垂直入射するように第1干渉計とオプティカルパラレルとの相対位置が調整可能に構成されており、前記第2干渉計の被検光束が前記オプティカルパラレルに対し垂直入射するように第2干渉計とオプティカルパラレルとの相対位置が調整可能に構成されており、前記第2干渉計による検出結果に基づいて前記第1干渉計に対する被検光学素子の傾きが調整可能に構成されていることを特徴とする干渉測定システム。
- 被検光学素子が前記第2干渉計側の面に平面部を有し、その平面部に前記第2干渉計の被検光束を入射させて得られる反射光から、前記第1干渉計に対する被検光学素子の傾きを前記第2干渉計で検出することを特徴とする請求項12又は13記載の干渉測定システム。
- 前記第2干渉計が非球面波発生光学素子を有し、被検光学素子が前記第2干渉計側の面に非球面部を有し、その非球面部に前記第2干渉計の被検光束を入射させて得られる反射光から、前記第1干渉計に対する被検光学素子の傾きを前記第2干渉計で検出することを特徴とする請求項12又は13記載の干渉測定システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004006335A JP2005201703A (ja) | 2004-01-14 | 2004-01-14 | 干渉測定方法及び干渉測定システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004006335A JP2005201703A (ja) | 2004-01-14 | 2004-01-14 | 干渉測定方法及び干渉測定システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005201703A true JP2005201703A (ja) | 2005-07-28 |
Family
ID=34820339
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004006335A Pending JP2005201703A (ja) | 2004-01-14 | 2004-01-14 | 干渉測定方法及び干渉測定システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005201703A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007033343A (ja) * | 2005-07-28 | 2007-02-08 | Hoya Corp | 偏心測定方法、偏心測定装置、非球面単レンズの製造方法、非球面単レンズ及び光学機器 |
| JP2007093293A (ja) * | 2005-09-27 | 2007-04-12 | Pentax Corp | 対物レンズの傾き調整用光学系 |
| JP2007205905A (ja) * | 2006-02-02 | 2007-08-16 | Matsushita Electric Ind Co Ltd | レンズ計測方法、製造方法、及び光ピックアップ |
| JP2008209365A (ja) * | 2007-02-28 | 2008-09-11 | Olympus Corp | 干渉測定装置及び干渉測定方法 |
| JP2009236694A (ja) * | 2008-03-27 | 2009-10-15 | Konica Minolta Opto Inc | レンズ測定装置、レンズ測定方法、及びレンズ生産方法 |
| WO2010052895A1 (ja) * | 2008-11-06 | 2010-05-14 | キヤノンマーケティングジャパン株式会社 | アライメントシステム、アライメントシステムの制御方法、プログラム及び測定装置 |
| JP2016225883A (ja) * | 2015-06-01 | 2016-12-28 | 三菱電機株式会社 | 空間光通信装置 |
| KR20200063099A (ko) * | 2018-11-22 | 2020-06-04 | 쑤저우 인스티튜트 오브 바이오메디컬 엔지니어링 엔드 테크놀러지, 차이니즈 아카데미 오브 사이언시스 | 파면 기술에 기반한 비구면 렌즈 편심 검출장치 및 그 검출방법 |
| CN112525343A (zh) * | 2020-11-11 | 2021-03-19 | 中国科学院空天信息创新研究院 | 一种针对色散型成像光谱仪的检测方法及装置 |
-
2004
- 2004-01-14 JP JP2004006335A patent/JP2005201703A/ja active Pending
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007033343A (ja) * | 2005-07-28 | 2007-02-08 | Hoya Corp | 偏心測定方法、偏心測定装置、非球面単レンズの製造方法、非球面単レンズ及び光学機器 |
| JP4694331B2 (ja) * | 2005-09-27 | 2011-06-08 | Hoya株式会社 | 対物レンズの傾き調整用光学系 |
| JP2007093293A (ja) * | 2005-09-27 | 2007-04-12 | Pentax Corp | 対物レンズの傾き調整用光学系 |
| JP2007205905A (ja) * | 2006-02-02 | 2007-08-16 | Matsushita Electric Ind Co Ltd | レンズ計測方法、製造方法、及び光ピックアップ |
| JP4710630B2 (ja) * | 2006-02-02 | 2011-06-29 | パナソニック株式会社 | レンズ計測装置、及び計測方法 |
| JP2008209365A (ja) * | 2007-02-28 | 2008-09-11 | Olympus Corp | 干渉測定装置及び干渉測定方法 |
| JP2009236694A (ja) * | 2008-03-27 | 2009-10-15 | Konica Minolta Opto Inc | レンズ測定装置、レンズ測定方法、及びレンズ生産方法 |
| JP4573252B2 (ja) * | 2008-11-06 | 2010-11-04 | キヤノンマーケティングジャパン株式会社 | アライメントシステム、アライメントシステムの制御方法、プログラム及び測定装置 |
| JP2010133939A (ja) * | 2008-11-06 | 2010-06-17 | Canon Marketing Japan Inc | アライメントシステム、アライメントシステムの制御方法、プログラム及び測定装置 |
| WO2010052895A1 (ja) * | 2008-11-06 | 2010-05-14 | キヤノンマーケティングジャパン株式会社 | アライメントシステム、アライメントシステムの制御方法、プログラム及び測定装置 |
| CN102203577A (zh) * | 2008-11-06 | 2011-09-28 | 佳能市场营销日本株式会社 | 对准系统、对准系统的控制方法、程序以及测定装置 |
| CN102203577B (zh) * | 2008-11-06 | 2014-07-09 | 佳能市场营销日本株式会社 | 对准系统、对准系统的控制方法、程序以及测定装置 |
| JP2016225883A (ja) * | 2015-06-01 | 2016-12-28 | 三菱電機株式会社 | 空間光通信装置 |
| KR20200063099A (ko) * | 2018-11-22 | 2020-06-04 | 쑤저우 인스티튜트 오브 바이오메디컬 엔지니어링 엔드 테크놀러지, 차이니즈 아카데미 오브 사이언시스 | 파면 기술에 기반한 비구면 렌즈 편심 검출장치 및 그 검출방법 |
| KR102292329B1 (ko) * | 2018-11-22 | 2021-08-25 | 쑤저우 인스티튜트 오브 바이오메디컬 엔지니어링 엔드 테크놀러지, 차이니즈 아카데미 오브 사이언시스 | 파면 기술에 기반한 비구면 렌즈 편심 검출장치 및 그 검출방법 |
| US11506567B2 (en) | 2018-11-22 | 2022-11-22 | Suzhou Institute Of Biomedical Engineering And Technology, Chinese Academy Of Sciences | Aspheric lens eccentricity detecting device based on wavefront technology and detecting method thereof |
| CN112525343A (zh) * | 2020-11-11 | 2021-03-19 | 中国科学院空天信息创新研究院 | 一种针对色散型成像光谱仪的检测方法及装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2478328B1 (en) | Method of measuring a shape of an optical surface | |
| JP4302512B2 (ja) | 非球面表面および波面に対する干渉計スキャニング | |
| EP2538170A1 (en) | Method and device for measuring multiple parameters of differential confocal interference component | |
| US8913234B2 (en) | Measurement of the positions of centres of curvature of optical surfaces of a multi-lens optical system | |
| JP5486379B2 (ja) | 面形状計測装置 | |
| EP2369319A2 (en) | Aspheric object measuring method and apparatus | |
| US7212291B2 (en) | Interferometric microscopy using reflective optics for complex surface shapes | |
| JP6000577B2 (ja) | 非球面計測方法、非球面計測装置、光学素子加工装置および光学素子の製造方法 | |
| US8947676B2 (en) | Aspheric surface measuring method, aspheric surface measuring apparatus, optical element producing apparatus and optical element | |
| EP2306142A1 (en) | Surface shape measurement apparatus | |
| JP2002071513A (ja) | 液浸系顕微鏡対物レンズ用干渉計および液浸系顕微鏡対物レンズの評価方法 | |
| JP2009162539A (ja) | 光波干渉測定装置 | |
| EP2549222B1 (en) | Use of an abscissa calibration jig, abscissa calibration method and laser interference measuring apparatus | |
| JP2005201703A (ja) | 干渉測定方法及び干渉測定システム | |
| JPH02161332A (ja) | 曲率半径測定装置及び方法 | |
| JP2007298281A (ja) | 被検体の面形状の測定方法及び測定装置 | |
| US20020054296A1 (en) | Point source microscope: device, methods and assembly procedures | |
| JP2010216922A (ja) | 光学式変位計及び光学式変位測定方法 | |
| JP2007218931A (ja) | 光学面の形状測定方法および装置および記録媒体 | |
| JP2009244227A (ja) | 光波干渉測定装置 | |
| JP4007473B2 (ja) | 波面形状測定方法 | |
| JP5430473B2 (ja) | 面形状計測装置 | |
| JP2009133727A (ja) | 屈折率測定方法及び装置 | |
| JP2011247736A (ja) | 被検曲面形状測定装置 | |
| JP3061653B2 (ja) | 非球面の測定方法および測定装置 |