JP5486379B2 - 面形状計測装置 - Google Patents
面形状計測装置 Download PDFInfo
- Publication number
- JP5486379B2 JP5486379B2 JP2010083402A JP2010083402A JP5486379B2 JP 5486379 B2 JP5486379 B2 JP 5486379B2 JP 2010083402 A JP2010083402 A JP 2010083402A JP 2010083402 A JP2010083402 A JP 2010083402A JP 5486379 B2 JP5486379 B2 JP 5486379B2
- Authority
- JP
- Japan
- Prior art keywords
- reference point
- measuring
- test surface
- shape
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
- G01B21/04—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness by measuring coordinates of points
- G01B21/042—Calibration or calibration artifacts
Description
(x−s)2+(y−t)2+(z−u)2=q2 ・・・(1)
ここで、式(1)の両辺を、s,t,uで偏微分すると、式(2)が得られる。
x=s−q∂q/∂s
y=t−q∂q/∂t
z=u−q∂q/∂u・・・(2)
したがって、計測ヘッド110の基準点位置F(s,t,u)と点F(s,t,u)から被検面10までの距離qとを計測することにより、式(2)に従って被検面10上の点の座標群、即ち被検面10の面形状を求めることができる。これを基本原理としている。
(x y z)=(s t u)−q(α β γ)・・・(3)
(α β γ)=(∂q/∂s ∂q/∂t ∂q/∂u)・・・(4)
式(4)を使うことにより、計測ヘッド110の基準点位置F(s,t,u)と、点Fから被検面10までの垂直距離qとから、単位法線ベクトル(α β γ)が得られ、それを式(3)に代入することにより、被検面形状(x y z)が得られる。以上が基本原理である。

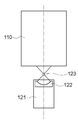
図1は、本発明の第1実施形態の面形状計測装置の概略構成を示す図である。図1(a)は正面図、図1(b)は側面図である。ここでは、図1に示すようにxyz座標系が定義されている。面形状計測装置は、ベース定盤101と、ベース定盤101によって支持された基準フレーム102と、ベース定盤101によって支持されたワークホルダー106と、計測ヘッド110とを備えている。ワークホルダー106によって被検面10を有する被検物が保持されている。面形状計測装置は、計測ヘッド110のx位置を計測するための基準平面ミラー103、計測ヘッド110のy位置を計測するための基準平面ミラー104、計測ヘッド110のz位置を計測するための基準平面ミラー105を備えている。これらは基準フレーム102に取り付けられている。
(s1,t1,u1),q1
(s2,t2,u2),q2
・
・
(sj,tj,uj),qj・
・
(sN,tN,uN),qN
このデータ群のうち、j番目の計測点における単位法線ベクトルnj=(αj,βj,γj)を、次のようにして求めることができる。
ただし、
(Δsjm,Δtjm,Δujm)=(sjm,tjm,ujm)−(sj,tj,uj)
Δqjm=qjm−qj
(sjm,tjm,ujm):j番目の計測点の近傍に位置する計測点、qjm:j番目の計測点の近傍に位置する計測点における点Cと点Fとの距離
m=1,2,・・・,k
である。
αj 2+βj 2+γj 2=1 ・・・(7)
である。
(xj yj zj)=(sj tj uj)−qj(αj βj γj) ・・・(8)
これを各計測点について行うことにより、被検面10の面形状を表す座標点の集合を式(9)のように決定することができる。
(x1,y1,z1)
(x2,y2,z2)
・
・
(xj,yj,zj)
・
・
(xN,yN,zN)
・・・(9)
q=Q−Q0 ・・・(10)
以上のように、計測ヘッド110を走査しながら、計測ヘッド110の基準点Fの位置と、基準点Fから被検面10までの垂直距離qとを計測することにより、被検面10の面形状を計測することができる。
(sj,tj,uj),j=1,2,・・・,N ・・・(11)
後述の工程503および工程506では、XYZステージ制御ユニット8は、式(11)に示される座標列(sj,tj,uj)を目標座標列(指令値)とする。そして、XYZステージ制御ユニット8は、計測ヘッド110の基準点F(s,t,u)が座標列(sj,tj,uj)で与えられる走査経路を走査するようにXYZステージ機構を制御する。ここで、式(11)で与えられる走査経路は、基準部材の計測および被検面10の計測において共通に使用される。また、走査経路上における計測点も、基準部材の計測および被検面10の計測において共通に使用される。共通して使用できる計測点がない計測点に対しては、周辺の計測点から内挿により計測点を生成し、共通して使用する計測点とすることができる。
・・・(12)
ここで、(sj tj uj)は、計測ヘッド110の基準点座標を示すベクトルであり、走査経路を示す目標座標列(指令値)である。qj’は、距離qjの計測値である。(αj’ βj’ γj’)は、走査経路を示す目標座標列(指令値)(sj,tj,uj)と垂直距離qjの計測値qj’とに基づいて計算される単位法線ベクトルである。
(xj yj zj)=(sj tj uj)−qj(αj βj γj)j=1,2,・・・,N
・・・(13)
ここで、qjは、走査経路と基準部材の既知の形状とから計算される垂直距離である。(αj βj γj)は、走査経路を示す目標座標列(指令値)(sj,tj,uj)と垂直距離の計算値qiとに基づいて計算される単位法線ベクトルである。
xj=sj−qj・αj ・・・(14)
ここで、球面波の実際の中心座標が指令値Sjにオフセット値δsjを加えた座標であるときに、xjがxj’として計測されると考えることができる。オフセット値δsjによるxjの変化量は、式(15)式のように表すことができる。
よって、オフセット値δsjは、式(15)を変形して、式(16)のように表すことができる。
他成分についても同様である。計測ヘッド110のる基準点座標の指令値(sj,tj,uj)に対するオフセット(δsj,δtj,δuj)は、式(17)のようになる。
よって、工程504において、計測ヘッド110の基準点座標の校正された座標は、式(18)のように、基準点座標の指令値(sj,tj,uj)をオフセット(δsj,δtj,δuj)によって補正した座標として与えられる。
(sj+δsj,tj+δtj,uj+δuj)j=1,2,・・・,N
・・・(18)
工程507では、式(18)で示される校正された基準点座標を用いて、前述した形状を求めるアルゴリズムを実行することにより、補正された被検面の形状を得ることができる。
本実施形態は、計測ヘッド110を、基準点位置F(s,t,u)と、被検面から基準点Fへ向けての単位法線ベクトル(α β γ)を計測するようにした場合である。ここで言及しない事項は、第1実施形態に従いうる。
上記の式(4)は、積分形式で、式(20)として表すことができる。
q=q0+∫(αds+βdt+γdu)・・・(20)
ただし、q0は積分定数である。
Dx=Kα
Dy=Kβ
である。Kは、計測ヘッド110の受光光学系の構成により定められる定数である。この関係と、単位法線ベクトルの性質
α2+β2+γ2=1
より、単位法線ベクトルは、
α=Dx/K
β=Dy/K
γ=(1−α2−β2)1/2
として計算することができる。
(s1,t1,u1),(α1,β1,γ1)
(s2,t2,u2),(α2,β2,γ2)
・
・
(sj,tj,uj),(αi,βi,γi)
・
・
(sN,tN,uN),(αN,βN,γN)
このデータ群のうち、i番目の計測点における距離qjを、次のようにして求めることができる。
ただし、
(Δsk,Δtk,Δuk)=(sk,tk,uk)−(sk-1,tk-1,uk-1)
である。積分定数q0を定める方法は後述する。
(xj yj zj)=(sj tj uj)−qj(αj βj γj) ・・・(22)
これを各計測点について行うことにより、被検面10の面形状を表す座標点の集合を式(23)のように決定することができる。
(x1,y1,z1)
(x2,y2,z2)
・
・
(xj,yj,zj)
・
・
(xN,yN,zN)
・・・(23)
(x0j y0j z0j)=(sj tj uj)−(q0+q0j)(α0j β0j γ0j)・・・(24)
とあらわすことができる。ここで、(x0j y0j z0j)は被検面上の点、(sj tj uj)は基準点Fの位置座標、q0jは、積分定数q0をある値q0として式(21)から計算される、基準点Fから被検面までの距離である。
(xj yj zj)=(sj tj uj)−qj(αj βj γj)・・・(25)
とする。ここで、(sj tj uj)は基準点Fの位置座標で式(24)と同じ値、qjは設計形状から計算される、基準点Fから被検面までの距離である。
である。したがって、式(24)、式(25)を式(26)へ代入し、q0について最小二乗法を適用することにより、積分定数q0が求められる。
垂直距離qは、例えば、アブソリュート型測長器によって計測されうる。本実施形態は、計測ヘッド110をアブソリュート型測長器とする場合である。なお、ここで言及しない事項は、第1実施形態に従いうる。
特許第2764630号公報にアブソリュート型測長器が開示されている。特許第2764630号公報に開示されたアブソリュート型測長器は、光の干渉縞の干渉次数を特定する機能を有し、これにより物体までの絶対距離を測定する。前記アブソリュート型測長器は、(a)出力光の周波数を所定範囲で連続的に変化させることができる光源と、(b)前記光源の周波数安定化手段とを有する。前記アブソリュート型測長器はまた、(c)前記物体からの反射光と参照光との干渉位相を測定する干渉位相測定手段と、(d)少なくとも一つの長さ基準を具備し該長さ基準を光路差として得られる干渉位相を測定する手段とを有する。前記周波数安定化手段は、光吸収用セルと、光センサと、帰還手段とを具備する。前記光吸収用セルは、特定の周波数域において光吸収のピークを有し、前記光源の出力光を入力とする。前記光センサは、前記光吸収用セルを通過した光の強度を測定する。前記帰還手段は、前記光センサの出力の低下により前記光源の出力光の周波数が前記光吸収用セルの吸収ピークの周波数に達したことを検出し、制御信号を前記光源に帰還させる。前記周波数安定化手段は、前記光源の周波数が前記吸収ピークの周波数と一致すると、前記光源の周波数を前記吸収ピークの周波数に固定する。
図8を参照しながら本発明の第4実施形態を説明する。ここで言及しない事項は、第1実施形態、または第2の実施形態、または第3の実施形態に従いうる。第3実施形態は、天体望遠鏡などで使用されうる大口径の凹面非球面ミラーの形状計測に好適である。図8において、401は被検面10の近似球面の一例であり、この例では、近似球面は被検面10の外接円である。近似球面は、内接球面や近軸内接球面などでもよい。点Oは近似球面401の中心、点Fは計測ヘッド110から放射される球面波の中心すなわち基準点、点Cは計測ヘッド110から放射される球面波が被検面10において正反射する点である。402は走査経路であり、計測ヘッド110の基準点は、この走査経路に沿って走査される。図8では、走査経路がxy平面に平行な平面である例が示されているが、走査経路は平面である必要はない。
なお、以上の実施形態の計測ヘッド110は、球面波を基準点Fから一度に放射していた。しかし、その球面波の一部に相当する細い光束(平面波)を基準点Fから放射し、被検面10上のその球面波が入射する領域をその細い光束で走査するように、計測ヘッド110を構成しても良い。このように計測ヘッド110を構成することで、被検面10上の狭い領域のみで反射された被検光を検出ユニット208で検出することになるため、検出結果に含まれるノイズを低減することが可能となる。
Claims (8)
- 被検面の形状を計測する面形状計測装置であって、
基準点を通過するように放射されて前記被検面で反射され前記基準点を通って戻ってくる被検光を検出することによって、前記基準点と前記被検面上の点との間の距離を計測する計測ヘッドと、
前記基準点を移動するように前記計測ヘッドを走査する走査機構と、
前記計測ヘッドを使った計測により得られた前記距離と前記基準点の座標とに基づいて前記被検面上の点から前記基準点への法線の方位を計算し、前記距離と前記方位とに基づいて前記被検面の形状を計算する処理部とを備え、
前記処理部は、
走査経路に沿って前記計測ヘッドを走査しながら第1の被検面を計測して得られた前記第1の被検面の形状を用いて、前記基準点の座標を校正し、
前記第1の被検面を計測するための前記走査経路と同一の経路に沿って前記計測ヘッドを走査しながら前記第1の被検面とは異なる第2の被検面を計測して得られた前記第2の被検面の形状を、校正された基準点の座標に基づいて補正する、
ことを特徴とする面形状計測装置。 - 前記計測ヘッドは、前記基準点を通過するように放射され前記被検面で反射され前記基準点を通って戻ってくる被検光と参照光との干渉波を検出することによって前記距離を計測する、
ことを特徴とする請求項1に記載の面形状計測装置。 - 被検面の形状を計測する面形状計測装置であって、
基準点を通過するように放射されて前記被検面で反射され前記基準点を通って戻ってくる被検光を検出することによって、前記被検面上の点から前記基準点への法線の方位を計測する計測ヘッドと、
前記基準点を移動するように前記計測ヘッドを走査する走査機構と、
前記計測ヘッドを使った計測により得られた前記方位と前記基準点の座標とに基づいて前記基準点と前記被検面上の点との間の距離を計算し、前記距離と前記方位とに基づいて前記被検面の形状を計算する処理部とを備え、
前記処理部は、
走査経路に沿って前記計測ヘッドを走査しながら第1の被検面を計測して得られた前記第1の被検面の形状を用いて、前記基準点の座標を校正し、
前記第1の被検面を計測するための前記走査経路と同一の経路に沿って前記計測ヘッドを走査しながら前記第1の被検面とは異なる第2の被検面を計測して得られた前記第2の被検面の形状を、校正された基準点の座標に基づいて補正する、
ことを特徴とする面形状計測装置。 - 前記計測ヘッドは、光スポット位置センサーを含み、前記基準点を通過するように放射され被検面で反射され前記基準点を通って戻ってくる被検光が前記光スポット位置センサーに入射する位置を検出することによって前記方位を計測する
ことを特徴とする請求項3に記載の面形状計測装置。 - 前記走査機構は、前記基準点が前記走査経路に沿って移動するように前記計測ヘッドを走査する、
ことを特徴とする請求項1乃至4のいずれか1項に記載の面形状計測装置。 - 前記処理部は、前記走査機構が前記基準点が前記走査経路に沿って移動するように前記計測ヘッドを走査したときに生じる前記走査経路に対する前記基準点のオフセット値を計算し、該オフセット値により前記走査経路の座標を補正することによって、前記基準点の校正された座標を決定する、
ことを特徴とする請求項5に記載の面形状計測装置。 - 前記計測ヘッドは、前記基準点から前記基準点を中心とする球面波を放射する、
ことを特徴とする請求項1乃至6のいずれか1項に記載の面形状計測装置。 - 前記計測ヘッドは、球面波の一部に相当する光束を、前記基準点を通過して前記被検面で反射されて前記基準点に戻ってくるように放射することを特徴とする請求項1乃至6のいずれか1項に記載の面形状計測装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010083402A JP5486379B2 (ja) | 2009-10-01 | 2010-03-31 | 面形状計測装置 |
| US12/891,736 US8411280B2 (en) | 2009-10-01 | 2010-09-27 | Surface shape measurement apparatus |
| EP10180680A EP2306144A1 (en) | 2009-10-01 | 2010-09-28 | Surface shape measurement apparatus |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009229993 | 2009-10-01 | ||
| JP2009229993 | 2009-10-01 | ||
| JP2010083402A JP5486379B2 (ja) | 2009-10-01 | 2010-03-31 | 面形状計測装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011095241A JP2011095241A (ja) | 2011-05-12 |
| JP2011095241A5 JP2011095241A5 (ja) | 2013-05-09 |
| JP5486379B2 true JP5486379B2 (ja) | 2014-05-07 |
Family
ID=43303950
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010083402A Expired - Fee Related JP5486379B2 (ja) | 2009-10-01 | 2010-03-31 | 面形状計測装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8411280B2 (ja) |
| EP (1) | EP2306144A1 (ja) |
| JP (1) | JP5486379B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5430472B2 (ja) * | 2009-10-01 | 2014-02-26 | キヤノン株式会社 | 面形状計測装置 |
| DE102011011065B4 (de) * | 2011-02-11 | 2013-04-04 | Luphos Gmbh | Verfahren und Vorrichtung zur hochpräzisen Vermessung von Oberflächen |
| WO2012140285A1 (es) * | 2011-04-15 | 2012-10-18 | Albiasa Collector Trough, S.L. | Procedimiento para comprobar la geometría de captadores solares cilíndro-parabólicos y sistema para llevar a cabo dicho procedimiento |
| US8526012B1 (en) | 2012-04-17 | 2013-09-03 | Laser Design, Inc. | Noncontact scanning system |
| DE102014007201B4 (de) * | 2014-05-19 | 2016-03-10 | Luphos Gmbh | Vorrichtung und Verfahren zur geometrischen Vermessung eines Objekts |
| DE102014007203A1 (de) * | 2014-05-19 | 2015-11-19 | Luphos Gmbh | Vorrichtung und Verfahren zur geometrischen Vermessung eines Objekts |
| CN105783790A (zh) * | 2016-05-09 | 2016-07-20 | 常州机电职业技术学院 | 导轨间垂直度的测量工装及测量方法 |
| JP6513846B2 (ja) * | 2017-06-06 | 2019-05-15 | 株式会社日立製作所 | 距離測定装置、及び立体形状測定装置。 |
| CN107339941A (zh) * | 2017-07-21 | 2017-11-10 | 复旦大学 | 一种基于双频激光干涉原理的精确位移监测系统 |
| JP7353644B2 (ja) | 2020-01-08 | 2023-10-02 | 株式会社Xtia | 光学スキャナ装置の校正方法、光学スキャナ装置及び光学式三次元形状測定装置 |
| CN114894116B (zh) * | 2022-04-08 | 2024-02-23 | 苏州瀚华智造智能技术有限公司 | 一种测量数据融合方法及非接触式测量设备 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3836564A1 (de) * | 1988-10-27 | 1990-05-03 | Zeiss Carl Fa | Verfahren zur pruefung von optischen elementen |
| US5003166A (en) * | 1989-11-07 | 1991-03-26 | Massachusetts Institute Of Technology | Multidimensional range mapping with pattern projection and cross correlation |
| JP2764630B2 (ja) | 1990-03-20 | 1998-06-11 | 横河電機株式会社 | アブソリュート測長器 |
| JPH08226814A (ja) * | 1995-02-22 | 1996-09-03 | Fuji Xerox Co Ltd | 形状測定方法及びその装置 |
| US5625454A (en) * | 1995-05-24 | 1997-04-29 | Industrial Technology Research Institute | Interferometric method for optically testing an object with an aspherical surface |
| JP3474448B2 (ja) | 1998-09-01 | 2003-12-08 | 株式会社リコー | 座標軸直角度誤差の校正方法及び三次元形状測定装置 |
| JP2002116010A (ja) * | 2000-10-04 | 2002-04-19 | Ricoh Co Ltd | 三次元形状測定方法及び装置 |
| JP2002148025A (ja) * | 2000-11-09 | 2002-05-22 | Ricoh Co Ltd | 3次元形状測定装置 |
| US6771375B2 (en) | 2001-06-20 | 2004-08-03 | Zygo Corporation | Apparatus and method for measuring aspherical optical surfaces and wavefronts |
| US6972849B2 (en) | 2001-07-09 | 2005-12-06 | Kuechel Michael | Scanning interferometer for aspheric surfaces and wavefronts |
| US6714307B2 (en) * | 2001-10-16 | 2004-03-30 | Zygo Corporation | Measurement of complex surface shapes using a spherical wavefront |
| GB0322115D0 (en) * | 2003-09-22 | 2003-10-22 | Renishaw Plc | Method of error compensation |
| KR20070012459A (ko) * | 2004-05-10 | 2007-01-25 | 코닌클리케 필립스 일렉트로닉스 엔.브이. | 광학 정밀 측정을 위한 디바이스 및 방법 |
| US8224066B2 (en) * | 2007-05-29 | 2012-07-17 | Gerd Haeusler | Method and microscopy device for the deflectometric detection of local gradients and the three-dimensional shape of an object |
| KR100956853B1 (ko) * | 2008-04-04 | 2010-05-11 | 선문대학교 산학협력단 | 3차원 형상의 고속 형상측정장치 및 방법 |
-
2010
- 2010-03-31 JP JP2010083402A patent/JP5486379B2/ja not_active Expired - Fee Related
- 2010-09-27 US US12/891,736 patent/US8411280B2/en not_active Expired - Fee Related
- 2010-09-28 EP EP10180680A patent/EP2306144A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011095241A (ja) | 2011-05-12 |
| US8411280B2 (en) | 2013-04-02 |
| US20110080593A1 (en) | 2011-04-07 |
| EP2306144A1 (en) | 2011-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5486379B2 (ja) | 面形状計測装置 | |
| JP5430472B2 (ja) | 面形状計測装置 | |
| US5898501A (en) | Apparatus and methods for measuring wavefront aberrations of a microlithography projection lens | |
| EP1717546B1 (en) | Interferometer and method of calibrating the interferometer | |
| JP5349739B2 (ja) | 干渉計及び干渉計の校正方法 | |
| US8345263B2 (en) | Measurement method and measurement apparatus that measure a surface figure of an aspheric surface based on an interference pattern | |
| EP2549222B1 (en) | Use of an abscissa calibration jig, abscissa calibration method and laser interference measuring apparatus | |
| US20130044332A1 (en) | Surface profile measurement apparatus and alignment method thereof and an improved sub-aperture measurement data acquisition method | |
| KR20140048824A (ko) | 교정 장치, 교정 방법 및 계측 장치 | |
| JP2009162539A (ja) | 光波干渉測定装置 | |
| US20020057495A1 (en) | Measuring system for performance of imaging optical system | |
| JP2005140673A (ja) | 非球面偏心測定装置及び非球面偏心測定方法 | |
| JP2005201703A (ja) | 干渉測定方法及び干渉測定システム | |
| JP5430473B2 (ja) | 面形状計測装置 | |
| JP7293078B2 (ja) | 解析装置、解析方法、干渉測定システム、およびプログラム | |
| JP2009244227A (ja) | 光波干渉測定装置 | |
| JP5333919B2 (ja) | 平面形状測定装置および平面形状測定方法 | |
| JP2000088546A (ja) | 形状測定装置および測定方法 | |
| JP2012247361A (ja) | 面形状計測装置 | |
| JP5894464B2 (ja) | 計測装置 | |
| JP2010145184A (ja) | 測定方法及び測定装置 | |
| JP2003004424A (ja) | 面形状測定方法および装置 | |
| JPH10260020A (ja) | 非球面形状測定装置及び方法 | |
| JP2010145185A (ja) | 測定方法及び測定装置 | |
| JP2011247736A (ja) | 被検曲面形状測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130326 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131105 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140221 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| LAPS | Cancellation because of no payment of annual fees |