JP2005077349A - 加速度センサ - Google Patents
加速度センサ Download PDFInfo
- Publication number
- JP2005077349A JP2005077349A JP2003311066A JP2003311066A JP2005077349A JP 2005077349 A JP2005077349 A JP 2005077349A JP 2003311066 A JP2003311066 A JP 2003311066A JP 2003311066 A JP2003311066 A JP 2003311066A JP 2005077349 A JP2005077349 A JP 2005077349A
- Authority
- JP
- Japan
- Prior art keywords
- acceleration sensor
- frame
- groove
- sensor element
- semiconductor substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B7/00—Microstructural systems; Auxiliary parts of microstructural devices or systems
- B81B7/0032—Packages or encapsulation
- B81B7/0045—Packages or encapsulation for reducing stress inside of the package structure
- B81B7/0051—Packages or encapsulation for reducing stress inside of the package structure between the package lid and the substrate
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P1/00—Details of instruments
- G01P1/02—Housings
- G01P1/026—Housings for speed measuring devices, e.g. pulse generator
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/0802—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2201/00—Specific applications of microelectromechanical systems
- B81B2201/02—Sensors
- B81B2201/0228—Inertial sensors
- B81B2201/0235—Accelerometers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81C—PROCESSES OR APPARATUS SPECIALLY ADAPTED FOR THE MANUFACTURE OR TREATMENT OF MICROSTRUCTURAL DEVICES OR SYSTEMS
- B81C2203/00—Forming microstructural systems
- B81C2203/01—Packaging MEMS
- B81C2203/0109—Bonding an individual cap on the substrate
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0808—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate
- G01P2015/0811—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate for one single degree of freedom of movement of the mass
- G01P2015/0814—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate for one single degree of freedom of movement of the mass for translational movement of the mass, e.g. shuttle type
Abstract
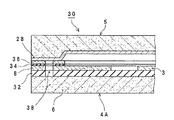
【解決手段】 加速度センサ2は、半導体基板6と、半導体基板6上に配設された、加速度センサ素子3および該センサ素子3を囲む枠部8と、枠部8上に配設された中間層34,36と、中間層34,36と接合され、これにより加速度センサ素子3を封止するキャップ部5とを備える。枠部8および中間層34,36にはそれぞれ、半導体基板6主面方向に関し略同一の位置に枠状の溝が設けられ、全体として枠状溝38が形成されている。
【選択図】 図4
Description
基板と、
基板上に配設された、加速度センサ素子および該センサ素子を囲む枠部と、
枠部上に配設された中間層と、
中間層と接合され、これにより加速度センサ素子を封止するキャップ部とを備え、
枠部および中間層にはそれぞれ、基板主面方向に関し略同一の位置に枠状の溝が設けてあることを特徴とする。
基板と、
基板上に配設された、加速度センサ素子および該センサ素子を囲む枠部と、
枠部上に配設された中間層と、
中間層と接合され、これにより加速度センサ素子を封止するキャップ部とを備え、
枠部は、中間層とキャップ部との接合領域よりも加速度センサ素子側に延在する延在部を有し、該延在部に加速度センサ素子を囲むように枠状の溝が設けてあることを特徴とする。
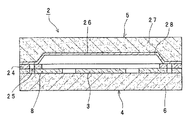
図1は、本発明に係る加速度センサの実施の形態1を示す断面図である。この加速度センサ2は、加速度センサ素子3を載置するためのベース部4と、ベース部4と接合してセンサ素子3を気密封止するためのキャップ部5とを備える。
図4は、本発明に係る加速度センサの実施の形態2を示す部分拡大断面図である。以下の説明では、実施の形態1と同一または類似の構成要素は同一の符号または同一の符号に適当な添字を付して表す。
図5は、本発明に係る加速度センサの実施の形態3を示す部分拡大断面図である。本実施形態に係る加速度センサ40は、実施の形態2の加速度センサ30の構成と類似しているが、ベース部4に溝38を設ける代わりに、キャップ本体27Bの接合領域に枠状の溝42を設ける。溝42は、凹部26Bと同一工程(例えばザグリ加工)で形成してもよいし、別工程(例えばエッチング)で形成してもよい。
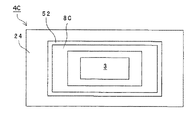
図6は、本発明に係る加速度センサの実施の形態4を示す断面図である。図7は、本実施形態に係る加速度センサ50のベース部4Cの上面図である。速度センサ50は、実施の形態1の加速度センサ2と類似の構成を有するが、ベース部とキャップ部との接合領域に溝25を設ける代わりに、接合領域よりも加速度センサ素子3側に延在した枠部8C部分(すなわち接合領域と加速度センサ素子3との間)に枠状の溝52を設けたものである。
図8は、本発明に係る加速度センサの実施の形態5を示す断面図である。本実施形態に係る加速度センサ60は、実施の形態2の加速度センサ30と類似の構成を有するが、キャップ部とベース部との接合領域に溝38を設ける代わりに、接合領域よりも加速度センサ素子3側に延在した枠部8D部分および絶縁層32(すなわち接合領域と加速度センサ素子3との間)に枠状の溝62を設けたものである。
図9は、本発明に係る加速度センサの実施の形態6を示す断面図である。本実施形態に係る加速度センサ70は、実施の形態2,3,5と同様の溝38E,42E,62Eを備えたものである。ベース部4Eの溝38Eとキャップ部5Eの溝42Eは、半導体基板6の主面方向に関して略同一位置に形成され、加速度センサ70の主面方向に関する寸法の小型化が図られている。
4A ベース部
5 キャップ部
6 半導体基板
8 枠部
28 金属層
30 加速度センサ
34 絶縁層
36 ノンドープのポリシリコン層
38 枠状の溝
Claims (4)
- 基板と、
基板上に配設された、加速度センサ素子および該センサ素子を囲む枠部と、
枠部上に配設された中間層と、
中間層と接合され、これにより加速度センサ素子を封止するキャップ部とを備え、
枠部および中間層にはそれぞれ、基板主面方向に関し略同一の位置に枠状の溝が設けてあることを特徴とする加速度センサ。 - 枠部および中間層にそれぞれ設けた溝が貫通溝であることを特徴とする請求項1の加速度センサ。
- キャップ部には、中間層との接合領域において、上記枠部および中間層の溝と基板主面方向に関し略同一の位置に溝が設けてあることを特徴とする請求項1または2の加速度センサ。
- 基板と、
基板上に配設された、加速度センサ素子および該センサ素子を囲む枠部と、
枠部上に配設された中間層と、
中間層と接合され、これにより加速度センサ素子を封止するキャップ部とを備え、
枠部は、中間層とキャップ部との接合領域よりも加速度センサ素子側に延在する延在部を有し、該延在部に加速度センサ素子を囲むように枠状の溝が設けてあることを特徴とする加速度センサ。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003311066A JP2005077349A (ja) | 2003-09-03 | 2003-09-03 | 加速度センサ |
| US10/816,812 US6988407B2 (en) | 2003-09-03 | 2004-04-05 | Acceleration sensor |
| TW093110193A TWI234659B (en) | 2003-09-03 | 2004-04-13 | Acceleration sensor |
| CNB2004100431437A CN100380129C (zh) | 2003-09-03 | 2004-05-12 | 加速度传感器 |
| KR1020040043725A KR100555617B1 (ko) | 2003-09-03 | 2004-06-14 | 가속도센서 |
| DE102004028927A DE102004028927B4 (de) | 2003-09-03 | 2004-06-15 | Beschleunigungssensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003311066A JP2005077349A (ja) | 2003-09-03 | 2003-09-03 | 加速度センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005077349A true JP2005077349A (ja) | 2005-03-24 |
| JP2005077349A5 JP2005077349A5 (ja) | 2006-03-09 |
Family
ID=34214245
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003311066A Pending JP2005077349A (ja) | 2003-09-03 | 2003-09-03 | 加速度センサ |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6988407B2 (ja) |
| JP (1) | JP2005077349A (ja) |
| KR (1) | KR100555617B1 (ja) |
| CN (1) | CN100380129C (ja) |
| DE (1) | DE102004028927B4 (ja) |
| TW (1) | TWI234659B (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009027055A (ja) * | 2007-07-23 | 2009-02-05 | Seiko Instruments Inc | 気密パッケージ及び気密パッケージの製造方法 |
| JP2010139495A (ja) * | 2008-11-13 | 2010-06-24 | Denso Corp | 半導体装置およびその製造方法 |
| JP2012127839A (ja) * | 2010-12-16 | 2012-07-05 | Japan Aviation Electronics Industry Ltd | 静電容量型加速度センサ |
| WO2012133765A1 (ja) * | 2011-03-30 | 2012-10-04 | 株式会社村田製作所 | 固体酸化物形燃料電池用接合材、固体酸化物形燃料電池及び固体酸化物形燃料電池モジュール |
| JP2016135761A (ja) * | 2015-01-14 | 2016-07-28 | 御木本製薬株式会社 | ディフェンシン産生促進剤、カテリシジン産生促進剤、抗菌剤 |
| WO2018003353A1 (ja) * | 2016-07-01 | 2018-01-04 | 株式会社デンソー | 半導体装置 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006125887A (ja) * | 2004-10-26 | 2006-05-18 | Fujitsu Media Device Kk | 加速度センサ |
| US7406870B2 (en) * | 2005-01-06 | 2008-08-05 | Ricoh Company, Ltd. | Semiconductor sensor |
| JP4839747B2 (ja) * | 2005-09-20 | 2011-12-21 | 三菱電機株式会社 | 静電容量型加速度センサ |
| JP4486103B2 (ja) * | 2007-03-19 | 2010-06-23 | Okiセミコンダクタ株式会社 | 加速度センサ、及び加速度センサの製造方法 |
| JP5446107B2 (ja) * | 2008-03-17 | 2014-03-19 | 三菱電機株式会社 | 素子ウェハおよび素子ウェハの製造方法 |
| CN103063876B (zh) * | 2013-01-05 | 2014-08-20 | 中国科学院上海微系统与信息技术研究所 | 变面积型电容式横向加速度传感器及制备方法 |
| US10131540B2 (en) * | 2015-03-12 | 2018-11-20 | Taiwan Semiconductor Manufacturing Co., Ltd. | Structure and method to mitigate soldering offset for wafer-level chip scale package (WLCSP) applications |
| JP6729423B2 (ja) | 2017-01-27 | 2020-07-22 | 三菱電機株式会社 | 半導体装置、半導体装置の製造方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI81915C (fi) * | 1987-11-09 | 1990-12-10 | Vaisala Oy | Kapacitiv accelerationsgivare och foerfarande foer framstaellning daerav. |
| US5121180A (en) * | 1991-06-21 | 1992-06-09 | Texas Instruments Incorporated | Accelerometer with central mass in support |
| JP2000022169A (ja) * | 1998-06-29 | 2000-01-21 | Matsushita Electric Works Ltd | 半導体加速度センサ及びその製造方法 |
| JP2000187040A (ja) | 1998-12-22 | 2000-07-04 | Matsushita Electric Works Ltd | 加速度センサおよびその製造方法 |
| JP2001337103A (ja) | 2000-05-26 | 2001-12-07 | Matsushita Electric Works Ltd | 半導体加速度センサ |
| JP4386559B2 (ja) | 2000-10-20 | 2009-12-16 | 三菱電機株式会社 | 加速度センサ及びその製造方法 |
| JP4156946B2 (ja) * | 2003-02-26 | 2008-09-24 | 三菱電機株式会社 | 加速度センサ |
-
2003
- 2003-09-03 JP JP2003311066A patent/JP2005077349A/ja active Pending
-
2004
- 2004-04-05 US US10/816,812 patent/US6988407B2/en not_active Expired - Fee Related
- 2004-04-13 TW TW093110193A patent/TWI234659B/zh not_active IP Right Cessation
- 2004-05-12 CN CNB2004100431437A patent/CN100380129C/zh not_active Expired - Fee Related
- 2004-06-14 KR KR1020040043725A patent/KR100555617B1/ko not_active IP Right Cessation
- 2004-06-15 DE DE102004028927A patent/DE102004028927B4/de not_active Expired - Fee Related
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009027055A (ja) * | 2007-07-23 | 2009-02-05 | Seiko Instruments Inc | 気密パッケージ及び気密パッケージの製造方法 |
| JP2010139495A (ja) * | 2008-11-13 | 2010-06-24 | Denso Corp | 半導体装置およびその製造方法 |
| JP2012127839A (ja) * | 2010-12-16 | 2012-07-05 | Japan Aviation Electronics Industry Ltd | 静電容量型加速度センサ |
| WO2012133765A1 (ja) * | 2011-03-30 | 2012-10-04 | 株式会社村田製作所 | 固体酸化物形燃料電池用接合材、固体酸化物形燃料電池及び固体酸化物形燃料電池モジュール |
| WO2012133087A1 (ja) * | 2011-03-30 | 2012-10-04 | 株式会社村田製作所 | 固体酸化物形燃料電池用接合材、固体酸化物形燃料電池及び固体酸化物形燃料電池モジュール |
| JP2016135761A (ja) * | 2015-01-14 | 2016-07-28 | 御木本製薬株式会社 | ディフェンシン産生促進剤、カテリシジン産生促進剤、抗菌剤 |
| WO2018003353A1 (ja) * | 2016-07-01 | 2018-01-04 | 株式会社デンソー | 半導体装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN100380129C (zh) | 2008-04-09 |
| US20050044953A1 (en) | 2005-03-03 |
| TWI234659B (en) | 2005-06-21 |
| DE102004028927B4 (de) | 2008-07-24 |
| US6988407B2 (en) | 2006-01-24 |
| KR20050025224A (ko) | 2005-03-14 |
| DE102004028927A1 (de) | 2005-04-07 |
| CN1591023A (zh) | 2005-03-09 |
| TW200510727A (en) | 2005-03-16 |
| KR100555617B1 (ko) | 2006-03-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8497557B2 (en) | Semiconductor device | |
| US6789423B2 (en) | Micro inertia sensor and method of manufacturing the same | |
| JP2005077349A (ja) | 加速度センサ | |
| EP1074827B1 (en) | Pressure sensor and method of manufacturing the same | |
| JP4495711B2 (ja) | 機能素子及びその製造方法 | |
| US7762141B2 (en) | Pressure sensor and manufacturing method thereof | |
| US9000544B2 (en) | MEMS package structure | |
| JP2004170390A (ja) | 力学量センサ | |
| JP2003337075A (ja) | 絶対圧型圧力センサ | |
| JP2001326367A (ja) | センサおよびその製造方法 | |
| JP2005172543A (ja) | 加速度センサおよび加速度センサの製造方法 | |
| JP2009014469A (ja) | 半導体装置及びその製造方法 | |
| JP7233982B2 (ja) | パッケージ及びパッケージの製造方法 | |
| JP5727798B2 (ja) | Memsセンサ | |
| KR100311826B1 (ko) | 마이크로센서의 밀봉 패캐지 방법 | |
| JP7079075B2 (ja) | パッケージ | |
| JP2002134759A (ja) | 加速度センサ及びその製造方法 | |
| JP2007057455A (ja) | 圧力センサ及び圧力センサの製造方法 | |
| JPH0831609B2 (ja) | 静電接合方法および半導体圧力センサ | |
| JP2005223209A (ja) | 真空パッケージセンサ素子、ウエハレベル真空パッケージおよびウエハレベル真空パッケージの製造方法 | |
| JP4095280B2 (ja) | 加速度センサ素子 | |
| JP2007292658A (ja) | 圧力センサ及びこの製造方法 | |
| JP2004132811A (ja) | 力検知素子と力検知素子の製造方法 | |
| JP2007078444A (ja) | 圧力センサ及び圧力センサの製造方法 | |
| JPH10107295A (ja) | 半導体センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060118 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060118 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080728 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080902 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081029 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20081029 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20081125 |