JP2005073722A - 遠隔操作方法及び遠隔操作システム - Google Patents
遠隔操作方法及び遠隔操作システム Download PDFInfo
- Publication number
- JP2005073722A JP2005073722A JP2003209750A JP2003209750A JP2005073722A JP 2005073722 A JP2005073722 A JP 2005073722A JP 2003209750 A JP2003209750 A JP 2003209750A JP 2003209750 A JP2003209750 A JP 2003209750A JP 2005073722 A JP2005073722 A JP 2005073722A
- Authority
- JP
- Japan
- Prior art keywords
- transmission
- controller
- moving toy
- toy
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Toys (AREA)
- Transceivers (AREA)
- Selective Calling Equipment (AREA)
Abstract
【課題】本発明は、動く玩具の電力消費を低減し電池の寿命を延ばすことのできる遠隔操作方法及び遠隔操作システムを提供することを目的とする。
【解決手段】動く玩具25をコントローラ20で操作する遠隔操作方法であって、所定時間毎に、動く玩具25から送信要求を行った後、一定時間だけ動く玩具25でコントローラ20からの操作信号を待ち受け、その後、送受信を停止し、コントローラ20で動く玩具25からの送信要求を受信して一定時間内に動く玩具25を操作するための操作信号を送信する
【選択図】 図1
【解決手段】動く玩具25をコントローラ20で操作する遠隔操作方法であって、所定時間毎に、動く玩具25から送信要求を行った後、一定時間だけ動く玩具25でコントローラ20からの操作信号を待ち受け、その後、送受信を停止し、コントローラ20で動く玩具25からの送信要求を受信して一定時間内に動く玩具25を操作するための操作信号を送信する
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は遠隔操作方法及び遠隔操作システムに関し、特に、動く玩具をコントローラで操作する遠隔操作方法及び遠隔操作システムに関する。
【0002】
【従来の技術】
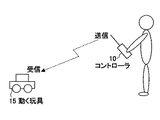
図7は、従来の遠隔操作システムの一例の概略構成図を示す。同図中、コントローラ10は送信部を有し、操作者の操作により発生した操作信号を無線または赤外線で送信する。動く玩具15は受信部を有し、コントローラ10からの操作信号を受信し、この操作信号に応じて玩具内蔵のアクチュエータを作動させて動く玩具15を動作させる。
【0003】
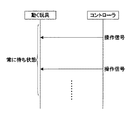
図8は、従来の遠隔操作システムの一例の動作シーケンスを示す。ここで、動く玩具15の受信部は常に操作信号を待ち受けており、コントローラ10から操作信号が送信されると、この操作信号を受信する。
【0004】
なお、電池駆動の無線通信装置において非送受信期間にRF回路及びベースバンド回路の動作を禁止して消費電力低減を図るものとして、例えば特許文献1に記載のものがある。
【0005】
【特許文献1】
特開2001−345732号公報
【0006】
【発明が解決しようとする課題】
しかし、図7に示す従来システムでは、動く玩具15の受信部は常にコントローラ10からの操作信号を受信する受信モードを維持しなければならず、受信部における消費電力が大きくなる。動く玩具15では動くために電力を消費するため、電池の電力消費が速く寿命が短くなるという問題があった。
【0007】
本発明は、上記の点に鑑みなされたもので、動く玩具の電力消費を低減し電池の寿命を延ばすことのできる遠隔操作方法及び遠隔操作システムを提供することを目的とする。
【0008】
【課題を解決するための手段】
請求項1に記載の発明は、動く玩具(25)をコントローラ(20)で操作する遠隔操作方法であって、
所定時間毎に、前記動く玩具(25)から送信要求を行った後、一定時間だけ前記動く玩具(25)で前記コントローラ(20)からの操作信号を待ち受け、その後、送受信を停止し、
前記コントローラ(20)で前記動く玩具(25)からの送信要求を受信して前記一定時間内に前記動く玩具(25)を操作するための操作信号を送信することにより、
動く玩具(25)の電力消費を低減し電池の寿命を延ばすことができる。
【0009】
請求項2に記載の発明は、動く玩具(25)をコントローラ(20)で操作する遠隔操作システムであって、
前記動く玩具(25)は、所定時間毎に送信要求を行った後、一定時間だけ前記コントローラ(20)からの操作信号を待ち受け、その後、送受信を停止する第1送受信部(34)を有し、
前記コントローラ(20)は、前記動く玩具(25)からの送信要求を受信して前記一定時間内に前記動く玩具(25)を操作するための操作信号を送信する第2送受信部(44)を有することにより、
動く玩具(25)の電力消費を低減し電池の寿命を延ばすことができる。
【0010】
なお、上記括弧内の参照符号は、理解を容易にするために付したものであり、一例にすぎず、図示の態様に限定されるものではない。
【0011】
【発明の実施の形態】
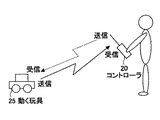
図1は、本発明の遠隔操作システムの一実施例の概略構成図を示す。同図中、コントローラ20は送受信部を有し、また、動く玩具25は送受信部を有し、コントローラ20と動く玩具25との間で双方向通信を行う。
【0012】
動く玩具25は、数msecから数100msecの範囲の所定時間(例えば10msec)毎にコントローラ20に対して送信要求を行う。コントローラ20は送受信部で動く玩具25からの送信要求を受信すると、操作者の操作により発生した操作信号を無線または赤外線で送信する。
【0013】
動く玩具25は、送信要求後例えば数msec程度の一定時間は送受信部を動作させ、一定時間内に送信要求に対する応答としてコントローラ20が送信する操作信号を受信すると、この操作信号に応じて玩具内蔵のアクチュエータを作動させ、動く玩具25を動作させる。
【0014】
図2は、動く玩具25の一実施例のブロック図を示す。同図中、動く玩具25は、周辺装置30と、マイクロプロセッサ32と、送受信部34と、デュプレクサ36及びアンテナ38を有している。
【0015】
動く玩具25は例えば自動車、飛行機、船等の模型であり、周辺装置30として上記自動車、飛行機、船等の舵を駆動するアクチュエータ30a、及び動く玩具25の動作位置や状態を検出するセンサ30bが設けられている。
【0016】
マイクロプロセッサ32は、動く玩具25全体の制御を行う。マイクロプロセッサ32は、内蔵タイマで所定時間を計時する毎に送受信部34の送信部に電源を供給し、送信要求の送信データTXDを送受信部34に供給する。そして、デュプレクサ36を送信側に切り替える(送信モード)。これにより、送信要求が送受信部34からアンテナ38を経て送信される。
【0017】
そして、送信要求を送信したのち一定時間だけデュプレクサ36を受信側に切り替え(受信モード)、送受信部34の受信部に電源を供給して、送受信部34で受信した受信データRXDを取り込む。次に、送受信部34への電源供給を停止すると共に、受信データRXDの操作指示を認識してアクチュエータ30aに駆動を指示し、センサ30bの検出信号を読み取って動く玩具25の動作位置や状態を認識する。
【0018】
図3は、コントローラ20の一実施例のブロック図を示す。同図中、コントローラ20は、周辺装置40と、マイクロプロセッサ42と、送受信部44と、デュプレクサ46及びアンテナ48を有している。
【0019】
周辺装置40として複数の操作用スイッチ(SW)40a、及び表示器40bが設けられている。マイクロプロセッサ42は、コントローラ20全体の制御を行う。マイクロプロセッサ42は、常に複数のスイッチ40aの操作を監視し、表示器40bにその時点の操作状況を表示する。
【0020】
また、マイクロプロセッサ42は、常に送受信部44の受信部に電源を供給すると共にデュプレクサ46を受信側に切り替えており、送受信部44で受信した送信要求の受信データRXDを取り込む。
【0021】
そして、送信要求を受信したのち一定時間だけデュプレクサ46を送信側に切り替え、送受信部44の送信部に電源を供給して、複数のスイッチ40aの操作に応じた操作信号の送信データTXDを送受信部44に供給する。複数のスイッチ40aの操作がない場合には、NOP(No OPeration:非動作)を指示する送信データTXDを送受信部44に供給する。これにより、操作信号が送受信部44からデュプレクサ46を通しアンテナ48を経て送信される。
【0022】
図4は、送受信部34,44の一実施例のブロック図を示す。同図中、マイクロプロセッサから端子50を介して入力される送信データTXDは低域フィルタ(LPF)52で不要高周波数成分を除去されて電圧制御発振器(VCO)54に供給される。電圧制御発振器54は送信データTXDのレベルに応じて発振周波数を可変することでFM変調を行い、電圧制御発振器54の出力する被FM変調波信号は送信アンプ58で増幅されて送信信号TX.RFとして端子60からデュプレクサに供給される。なお、低域フィルタ52,電圧制御発振器54,送信アンプ58が送信部を構成している。
【0023】
また、デュプレクサから端子62を介して入力される受信信号RX.RFは受信アンプ64で増幅され混合器(MIX)66に供給される。電圧制御発振器54は送信データTXDを供給されていない受信時に一定周波数で発振しており、この周波数信号が局部発振信号として混合器66に供給される。混合器66は受信信号RX.RFを局部発振信号と混合して中間周波(IF)信号を出力する。この中間周波信号はIFアンプ68に供給される。
【0024】
IFアンプ68で増幅された中間周波信号はFM復調器70に供給され、FM復調器70は中間周波信号をFM復調して受信データRXDを得る。受信データRXDは低域フィルタ72で不要高周波数成分を除去されて端子74からマイクロプロセッサに供給される。なお、電圧制御発振器54,受信アンプ64,混合器66,IFアンプ68,FM復調器70,低域フィルタ72が受信部を構成している。
【0025】
図5は、デュプレクサ36,46の一実施例のブロック図を示す。同図中、端子80,82は送受信部の端子60,62それぞれと接続される。アンテナスイッチ84は端子85を介してマイクロプロセッサから供給される切り替え制御信号に基づいて、上記端子80,82のいずれか一方を帯域フィルタ(BPF)86に接続する。アンテナスイッチ84が端子80を選択するとき送信信号TX.RFは帯域フィルタ86で帯域制限されてアンテナ88(アンテナ38または48に相当)から送信される。一方、アンテナスイッチ84が端子82を選択するときアンテナ88で受信された受信信号RX.RFは帯域フィルタ86で帯域制限されて端子82から送受信部に供給される。
【0026】
図6は、本発明の遠隔操作システムの一実施例の動作シーケンスを示す。ここで、動く玩具25は10msec程度の所定時間毎に、2msec程度の一定時間だけ送信モードとなって送受信部34から送信要求を送信し、その後、例えば2msec程度の一定時間だけ送受信部34を受信モードとして、コントローラ20からの操作信号を待ち受ける。なお、一定時間の受信モードを終了すると、送受信部34への電源供給を停止して省電力モードとなる。
【0027】
コントローラ20は送受信部44を待ち受けモードとして、動く玩具25からの送信要求を受信する。送信要求の受信により、送受信部44を送信モードとして操作者の操作により発生した操作信号を送信要求の応答として送信する。なお、操作者の操作がない場合には、NOPを指示する操作信号を送信要求の応答として送信する。
【0028】
例えば送受信部34を10msec毎に間欠動作させ、送信モード2msecの消費電流を100mA、受信モード2msecの消費電流を50mAとすると、平均消費電流は30mA(=[100×2+50×2]/10)となる。これに対し、従来方法では常に受信モードであるため平均消費電流は50mAであり、動く玩具25の送受信部34を間欠動作させることにより、動く玩具25の消費電力を低減することができる。
【0029】
【発明の効果】
上述の如く、請求項1に記載の発明は、所定時間毎に、動く玩具から送信要求を行った後、一定時間だけ動く玩具でコントローラからの操作信号を待ち受け、その後、送受信を停止し、コントローラで動く玩具からの送信要求を受信して一定時間内に動く玩具を操作するための操作信号を送信することにより、動く玩具の電力消費を低減し電池の寿命を延ばすことができる。
【0030】
請求項2に記載の発明は、動く玩具をコントローラで操作する遠隔操作システムであって、動く玩具は、所定時間毎に送信要求を行った後、一定時間だけコントローラからの操作信号を待ち受け、その後、送受信を停止する第1送受信部を有し、コントローラは、動く玩具からの送信要求を受信して一定時間内に動く玩具を操作するための操作信号を送信する第2送受信部を有することにより、動く玩具の電力消費を低減し電池の寿命を延ばすことができる。
【図面の簡単な説明】
【図1】本発明の遠隔操作システムの一実施例の概略構成図である。
【図2】動く玩具の一実施例のブロック図である。
【図3】コントローラの一実施例のブロック図である。
【図4】送受信部の一実施例のブロック図である。
【図5】デュプレクサの一実施例のブロック図である。
【図6】本発明の遠隔操作システムの一実施例の動作シーケンスである。
【図7】従来の遠隔操作システムの一例の概略構成図である。
【図8】従来の遠隔操作システムの一例の動作シーケンスである。
【符号の説明】
10,20 コントローラ
15,25 動く玩具
30,40 周辺装置
30a アクチュエータ
30b センサ
32,42 マイクロプロセッサ
34,44 送受信部
36,46 デュプレクサ
38,48 アンテナ
40a 操作用スイッチ
40b 表示器
52,72 低域フィルタ
54 電圧制御発振器
58 送信アンプ
64 受信アンプ
66 混合器
68 IFアンプ
70 FM復調器
84 アンテナスイッチ
86 帯域フィルタ
【発明の属する技術分野】
本発明は遠隔操作方法及び遠隔操作システムに関し、特に、動く玩具をコントローラで操作する遠隔操作方法及び遠隔操作システムに関する。
【0002】
【従来の技術】
図7は、従来の遠隔操作システムの一例の概略構成図を示す。同図中、コントローラ10は送信部を有し、操作者の操作により発生した操作信号を無線または赤外線で送信する。動く玩具15は受信部を有し、コントローラ10からの操作信号を受信し、この操作信号に応じて玩具内蔵のアクチュエータを作動させて動く玩具15を動作させる。
【0003】
図8は、従来の遠隔操作システムの一例の動作シーケンスを示す。ここで、動く玩具15の受信部は常に操作信号を待ち受けており、コントローラ10から操作信号が送信されると、この操作信号を受信する。
【0004】
なお、電池駆動の無線通信装置において非送受信期間にRF回路及びベースバンド回路の動作を禁止して消費電力低減を図るものとして、例えば特許文献1に記載のものがある。
【0005】
【特許文献1】
特開2001−345732号公報
【0006】
【発明が解決しようとする課題】
しかし、図7に示す従来システムでは、動く玩具15の受信部は常にコントローラ10からの操作信号を受信する受信モードを維持しなければならず、受信部における消費電力が大きくなる。動く玩具15では動くために電力を消費するため、電池の電力消費が速く寿命が短くなるという問題があった。
【0007】
本発明は、上記の点に鑑みなされたもので、動く玩具の電力消費を低減し電池の寿命を延ばすことのできる遠隔操作方法及び遠隔操作システムを提供することを目的とする。
【0008】
【課題を解決するための手段】
請求項1に記載の発明は、動く玩具(25)をコントローラ(20)で操作する遠隔操作方法であって、
所定時間毎に、前記動く玩具(25)から送信要求を行った後、一定時間だけ前記動く玩具(25)で前記コントローラ(20)からの操作信号を待ち受け、その後、送受信を停止し、
前記コントローラ(20)で前記動く玩具(25)からの送信要求を受信して前記一定時間内に前記動く玩具(25)を操作するための操作信号を送信することにより、
動く玩具(25)の電力消費を低減し電池の寿命を延ばすことができる。
【0009】
請求項2に記載の発明は、動く玩具(25)をコントローラ(20)で操作する遠隔操作システムであって、
前記動く玩具(25)は、所定時間毎に送信要求を行った後、一定時間だけ前記コントローラ(20)からの操作信号を待ち受け、その後、送受信を停止する第1送受信部(34)を有し、
前記コントローラ(20)は、前記動く玩具(25)からの送信要求を受信して前記一定時間内に前記動く玩具(25)を操作するための操作信号を送信する第2送受信部(44)を有することにより、
動く玩具(25)の電力消費を低減し電池の寿命を延ばすことができる。
【0010】
なお、上記括弧内の参照符号は、理解を容易にするために付したものであり、一例にすぎず、図示の態様に限定されるものではない。
【0011】
【発明の実施の形態】
図1は、本発明の遠隔操作システムの一実施例の概略構成図を示す。同図中、コントローラ20は送受信部を有し、また、動く玩具25は送受信部を有し、コントローラ20と動く玩具25との間で双方向通信を行う。
【0012】
動く玩具25は、数msecから数100msecの範囲の所定時間(例えば10msec)毎にコントローラ20に対して送信要求を行う。コントローラ20は送受信部で動く玩具25からの送信要求を受信すると、操作者の操作により発生した操作信号を無線または赤外線で送信する。
【0013】
動く玩具25は、送信要求後例えば数msec程度の一定時間は送受信部を動作させ、一定時間内に送信要求に対する応答としてコントローラ20が送信する操作信号を受信すると、この操作信号に応じて玩具内蔵のアクチュエータを作動させ、動く玩具25を動作させる。
【0014】
図2は、動く玩具25の一実施例のブロック図を示す。同図中、動く玩具25は、周辺装置30と、マイクロプロセッサ32と、送受信部34と、デュプレクサ36及びアンテナ38を有している。
【0015】
動く玩具25は例えば自動車、飛行機、船等の模型であり、周辺装置30として上記自動車、飛行機、船等の舵を駆動するアクチュエータ30a、及び動く玩具25の動作位置や状態を検出するセンサ30bが設けられている。
【0016】
マイクロプロセッサ32は、動く玩具25全体の制御を行う。マイクロプロセッサ32は、内蔵タイマで所定時間を計時する毎に送受信部34の送信部に電源を供給し、送信要求の送信データTXDを送受信部34に供給する。そして、デュプレクサ36を送信側に切り替える(送信モード)。これにより、送信要求が送受信部34からアンテナ38を経て送信される。
【0017】
そして、送信要求を送信したのち一定時間だけデュプレクサ36を受信側に切り替え(受信モード)、送受信部34の受信部に電源を供給して、送受信部34で受信した受信データRXDを取り込む。次に、送受信部34への電源供給を停止すると共に、受信データRXDの操作指示を認識してアクチュエータ30aに駆動を指示し、センサ30bの検出信号を読み取って動く玩具25の動作位置や状態を認識する。
【0018】
図3は、コントローラ20の一実施例のブロック図を示す。同図中、コントローラ20は、周辺装置40と、マイクロプロセッサ42と、送受信部44と、デュプレクサ46及びアンテナ48を有している。
【0019】
周辺装置40として複数の操作用スイッチ(SW)40a、及び表示器40bが設けられている。マイクロプロセッサ42は、コントローラ20全体の制御を行う。マイクロプロセッサ42は、常に複数のスイッチ40aの操作を監視し、表示器40bにその時点の操作状況を表示する。
【0020】
また、マイクロプロセッサ42は、常に送受信部44の受信部に電源を供給すると共にデュプレクサ46を受信側に切り替えており、送受信部44で受信した送信要求の受信データRXDを取り込む。
【0021】
そして、送信要求を受信したのち一定時間だけデュプレクサ46を送信側に切り替え、送受信部44の送信部に電源を供給して、複数のスイッチ40aの操作に応じた操作信号の送信データTXDを送受信部44に供給する。複数のスイッチ40aの操作がない場合には、NOP(No OPeration:非動作)を指示する送信データTXDを送受信部44に供給する。これにより、操作信号が送受信部44からデュプレクサ46を通しアンテナ48を経て送信される。
【0022】
図4は、送受信部34,44の一実施例のブロック図を示す。同図中、マイクロプロセッサから端子50を介して入力される送信データTXDは低域フィルタ(LPF)52で不要高周波数成分を除去されて電圧制御発振器(VCO)54に供給される。電圧制御発振器54は送信データTXDのレベルに応じて発振周波数を可変することでFM変調を行い、電圧制御発振器54の出力する被FM変調波信号は送信アンプ58で増幅されて送信信号TX.RFとして端子60からデュプレクサに供給される。なお、低域フィルタ52,電圧制御発振器54,送信アンプ58が送信部を構成している。
【0023】
また、デュプレクサから端子62を介して入力される受信信号RX.RFは受信アンプ64で増幅され混合器(MIX)66に供給される。電圧制御発振器54は送信データTXDを供給されていない受信時に一定周波数で発振しており、この周波数信号が局部発振信号として混合器66に供給される。混合器66は受信信号RX.RFを局部発振信号と混合して中間周波(IF)信号を出力する。この中間周波信号はIFアンプ68に供給される。
【0024】
IFアンプ68で増幅された中間周波信号はFM復調器70に供給され、FM復調器70は中間周波信号をFM復調して受信データRXDを得る。受信データRXDは低域フィルタ72で不要高周波数成分を除去されて端子74からマイクロプロセッサに供給される。なお、電圧制御発振器54,受信アンプ64,混合器66,IFアンプ68,FM復調器70,低域フィルタ72が受信部を構成している。
【0025】
図5は、デュプレクサ36,46の一実施例のブロック図を示す。同図中、端子80,82は送受信部の端子60,62それぞれと接続される。アンテナスイッチ84は端子85を介してマイクロプロセッサから供給される切り替え制御信号に基づいて、上記端子80,82のいずれか一方を帯域フィルタ(BPF)86に接続する。アンテナスイッチ84が端子80を選択するとき送信信号TX.RFは帯域フィルタ86で帯域制限されてアンテナ88(アンテナ38または48に相当)から送信される。一方、アンテナスイッチ84が端子82を選択するときアンテナ88で受信された受信信号RX.RFは帯域フィルタ86で帯域制限されて端子82から送受信部に供給される。
【0026】
図6は、本発明の遠隔操作システムの一実施例の動作シーケンスを示す。ここで、動く玩具25は10msec程度の所定時間毎に、2msec程度の一定時間だけ送信モードとなって送受信部34から送信要求を送信し、その後、例えば2msec程度の一定時間だけ送受信部34を受信モードとして、コントローラ20からの操作信号を待ち受ける。なお、一定時間の受信モードを終了すると、送受信部34への電源供給を停止して省電力モードとなる。
【0027】
コントローラ20は送受信部44を待ち受けモードとして、動く玩具25からの送信要求を受信する。送信要求の受信により、送受信部44を送信モードとして操作者の操作により発生した操作信号を送信要求の応答として送信する。なお、操作者の操作がない場合には、NOPを指示する操作信号を送信要求の応答として送信する。
【0028】
例えば送受信部34を10msec毎に間欠動作させ、送信モード2msecの消費電流を100mA、受信モード2msecの消費電流を50mAとすると、平均消費電流は30mA(=[100×2+50×2]/10)となる。これに対し、従来方法では常に受信モードであるため平均消費電流は50mAであり、動く玩具25の送受信部34を間欠動作させることにより、動く玩具25の消費電力を低減することができる。
【0029】
【発明の効果】
上述の如く、請求項1に記載の発明は、所定時間毎に、動く玩具から送信要求を行った後、一定時間だけ動く玩具でコントローラからの操作信号を待ち受け、その後、送受信を停止し、コントローラで動く玩具からの送信要求を受信して一定時間内に動く玩具を操作するための操作信号を送信することにより、動く玩具の電力消費を低減し電池の寿命を延ばすことができる。
【0030】
請求項2に記載の発明は、動く玩具をコントローラで操作する遠隔操作システムであって、動く玩具は、所定時間毎に送信要求を行った後、一定時間だけコントローラからの操作信号を待ち受け、その後、送受信を停止する第1送受信部を有し、コントローラは、動く玩具からの送信要求を受信して一定時間内に動く玩具を操作するための操作信号を送信する第2送受信部を有することにより、動く玩具の電力消費を低減し電池の寿命を延ばすことができる。
【図面の簡単な説明】
【図1】本発明の遠隔操作システムの一実施例の概略構成図である。
【図2】動く玩具の一実施例のブロック図である。
【図3】コントローラの一実施例のブロック図である。
【図4】送受信部の一実施例のブロック図である。
【図5】デュプレクサの一実施例のブロック図である。
【図6】本発明の遠隔操作システムの一実施例の動作シーケンスである。
【図7】従来の遠隔操作システムの一例の概略構成図である。
【図8】従来の遠隔操作システムの一例の動作シーケンスである。
【符号の説明】
10,20 コントローラ
15,25 動く玩具
30,40 周辺装置
30a アクチュエータ
30b センサ
32,42 マイクロプロセッサ
34,44 送受信部
36,46 デュプレクサ
38,48 アンテナ
40a 操作用スイッチ
40b 表示器
52,72 低域フィルタ
54 電圧制御発振器
58 送信アンプ
64 受信アンプ
66 混合器
68 IFアンプ
70 FM復調器
84 アンテナスイッチ
86 帯域フィルタ
Claims (4)
- 動く玩具をコントローラで操作する遠隔操作方法であって、所定時間毎に、前記動く玩具から送信要求を行った後、一定時間だけ前記動く玩具で前記コントローラからの操作信号を待ち受け、その後、送受信を停止し、前記コントローラで前記動く玩具からの送信要求を受信して前記一定時間内に前記動く玩具を操作するための操作信号を送信することを特徴とする遠隔操作方法。
- 動く玩具をコントローラで操作する遠隔操作システムであって、
前記動く玩具は、所定時間毎に送信要求を行った後、一定時間だけ前記コントローラからの操作信号を待ち受け、その後、送受信を停止する第1送受信部を有し、
前記コントローラは、前記動く玩具からの送信要求を受信して前記一定時間内に前記動く玩具を操作するための操作信号を送信する第2送受信部を有することを特徴とする遠隔操作システム。 - 請求項1記載の遠隔操作方法であって、
前記動く玩具と前記コントローラの間の信号の送受信を無線または赤外線により行うことを特徴とする遠隔操作方法。 - 請求項2記載の遠隔操作システムであって、
前記動く玩具と前記コントローラの間の信号の送受信を無線または赤外線により行うことを特徴とする遠隔操作システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003209750A JP2005073722A (ja) | 2003-08-29 | 2003-08-29 | 遠隔操作方法及び遠隔操作システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003209750A JP2005073722A (ja) | 2003-08-29 | 2003-08-29 | 遠隔操作方法及び遠隔操作システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005073722A true JP2005073722A (ja) | 2005-03-24 |
Family
ID=34402578
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003209750A Pending JP2005073722A (ja) | 2003-08-29 | 2003-08-29 | 遠隔操作方法及び遠隔操作システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005073722A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102641598A (zh) * | 2011-02-18 | 2012-08-22 | 王琦凡 | 一种控制玩具的方法、遥控器和系统 |
| CN102847323A (zh) * | 2012-09-15 | 2013-01-02 | 徐志强 | 采用高效省电遥控方式的遥控电动玩具 |
| CN102847322A (zh) * | 2012-09-15 | 2013-01-02 | 徐志强 | 一种电动玩具的低功耗遥控方法 |
| JP2013532531A (ja) * | 2010-07-30 | 2013-08-19 | シンキング テクノロジー インコーポレイテッド | 2つの側を有する乗り物玩具 |
| CN104722082A (zh) * | 2013-12-19 | 2015-06-24 | 广东东信玩具实业有限公司 | 一种玩具手柄遥控器的制备方法及遥控器 |
-
2003
- 2003-08-29 JP JP2003209750A patent/JP2005073722A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013532531A (ja) * | 2010-07-30 | 2013-08-19 | シンキング テクノロジー インコーポレイテッド | 2つの側を有する乗り物玩具 |
| CN102641598A (zh) * | 2011-02-18 | 2012-08-22 | 王琦凡 | 一种控制玩具的方法、遥控器和系统 |
| CN102847323A (zh) * | 2012-09-15 | 2013-01-02 | 徐志强 | 采用高效省电遥控方式的遥控电动玩具 |
| CN102847322A (zh) * | 2012-09-15 | 2013-01-02 | 徐志强 | 一种电动玩具的低功耗遥控方法 |
| CN104722082A (zh) * | 2013-12-19 | 2015-06-24 | 广东东信玩具实业有限公司 | 一种玩具手柄遥控器的制备方法及遥控器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20110182221A1 (en) | Hybrid communication terminal and program | |
| US20080254841A1 (en) | Communication terminal and computer-readable storage medium | |
| JP2011103672A (ja) | 電力効率のよいマルチアンテナワイヤレスデバイス | |
| JP2006173691A (ja) | 無線通信システム | |
| CN103714359A (zh) | 基于无线通信终端的射频识别方法及系统 | |
| JP2005073722A (ja) | 遠隔操作方法及び遠隔操作システム | |
| CN102057582A (zh) | 用于降低控制电路的电流消耗的装置和方法 | |
| JP3292702B2 (ja) | ラジオコントロール装置における送受信周波数の設定方法 | |
| JP4551814B2 (ja) | 無線通信装置 | |
| CN114513772A (zh) | 蓝牙通信终端、蓝牙控制设备及蓝牙通信系统 | |
| CN220107980U (zh) | 一种双模通信模组及物联网燃气表 | |
| CN218772451U (zh) | 蓝牙通信终端、蓝牙控制设备及蓝牙通信系统 | |
| CN111266745B (zh) | 激光切割的无线遥控设备、无线受控设备与激光切割系统 | |
| JP2001345732A (ja) | 無線通信装置および無線通信装置の制御方法 | |
| CN219512690U (zh) | 一种桥接设备 | |
| KR100344614B1 (ko) | 시분할통신 및 주파수분할통신방식 혼용 무선단말기 | |
| CN220108214U (zh) | 一种双模通信模组及智能燃气表 | |
| JP2004096220A (ja) | 電波送信機、遠隔駆動システム及び電波送信機の電波送信方法 | |
| JP2004194036A (ja) | 無線通信装置 | |
| JP2726428B2 (ja) | 無線電話装置 | |
| JP3607631B2 (ja) | 携帯通信端末 | |
| KR100681517B1 (ko) | Mb-mm 이동통신 단말기 및 mb-mm 이동통신단말기에 구비된 각 모뎀 간의 핸드오버 수행 방법 | |
| JPH08116302A (ja) | 移動無線システム及び移動無線端末装置 | |
| JPH0946267A (ja) | 無線通信機用高周波機器 | |
| JP2001320300A (ja) | 遠隔制御用送受信システム |