JP2004522932A - 車両内の物体の存在及び姿勢を識別するシステムを開発する方法 - Google Patents
車両内の物体の存在及び姿勢を識別するシステムを開発する方法 Download PDFInfo
- Publication number
- JP2004522932A JP2004522932A JP2001519213A JP2001519213A JP2004522932A JP 2004522932 A JP2004522932 A JP 2004522932A JP 2001519213 A JP2001519213 A JP 2001519213A JP 2001519213 A JP2001519213 A JP 2001519213A JP 2004522932 A JP2004522932 A JP 2004522932A
- Authority
- JP
- Japan
- Prior art keywords
- data
- algorithm
- occupancy
- seat
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/01516—Passenger detection systems using force or pressure sensing means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/01516—Passenger detection systems using force or pressure sensing means
- B60R21/0152—Passenger detection systems using force or pressure sensing means using strain gauges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/0153—Passenger detection systems using field detection presence sensors
- B60R21/01532—Passenger detection systems using field detection presence sensors using electric or capacitive field sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/0153—Passenger detection systems using field detection presence sensors
- B60R21/01534—Passenger detection systems using field detection presence sensors using electromagneticwaves, e.g. infrared
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/0153—Passenger detection systems using field detection presence sensors
- B60R21/01536—Passenger detection systems using field detection presence sensors using ultrasonic waves
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/01544—Passenger detection systems detecting seat belt parameters, e.g. length, tension or height-adjustment
- B60R21/01546—Passenger detection systems detecting seat belt parameters, e.g. length, tension or height-adjustment using belt buckle sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01512—Passenger detection systems
- B60R21/01544—Passenger detection systems detecting seat belt parameters, e.g. length, tension or height-adjustment
- B60R21/01548—Passenger detection systems detecting seat belt parameters, e.g. length, tension or height-adjustment sensing the amount of belt winded on retractor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/015—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting the presence or position of passengers, passenger seats or child seats, and the related safety parameters therefor, e.g. speed or timing of airbag inflation in relation to occupant position or seat belt use
- B60R21/01554—Seat position sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/04—Systems determining presence of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/06—Systems determining the position data of a target
- G01S15/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Acoustics & Sound (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Electromagnetism (AREA)
- Air Bags (AREA)
- Seats For Vehicles (AREA)
- Image Analysis (AREA)
- Radar Systems Or Details Thereof (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
種々のトランスデューサ及びパターン認識技術及びシート占有に関する情報を提供する任意のトランスデューサの組み合わせに適用される技術を用いた車両のシートの占有を決定するためのシステムを開発する方法。これらは、特に重量センサ、容量センサ、誘導センサ、超音波、光学、電磁気、運動、赤外線およびレーダーを含む。プロセッサーは、トランスデューサからデータを受け取り、シートの現在の占有状態を示す出力を得るためにデータを処理するトランスデューサに連結される。アルゴリズムはプロセッサーに内在され、多くのデータセット(シートの異なる占有状態を各々表わし、シートがその占有状態である間、トランスデューサからのデータから形成される)から作成されます。アルゴリズムは、シートの現在の占有状態を表わし、トランスデューサからのデータから形成されるデータセットの入力の際にシートの現在の占有状態を示す出力を生成する。アルゴリズムは適切なアルゴリズム作成プログラムによって作成されたニューラルネットワークあるいはニューラルファジーアルゴリズムであり得る。
Description
【0001】
(発明の分野)
本発明は、車両内に位置する人や物の存在および場所を識別し、様々なオブジェクトを検知やコントロールまたは評価する装置の分野に関係がある。現在の発明は搭乗者のシートの存在の発見および自由にオブジェクトの状態より乗り物の占有を評価するためのシステムを開発する、効率的で、高度に確実な方法に特に関係があり、例えば、後部に面するチャイルドシート(RFCS)位置の搭乗者は位置していた。占有者保護装置と対話する。エアバッグのように、または、検知のために、1つの、位置からはずれて、占有する。 deploymentが、衝突がそれら自身を強要するより占有者へのより大きな傷に帰着するかもしれない場合、生じるシステムは、占有者保護装置のdeploymentのコントロールおよび選択的な抑制を許す。これは、一部分システム、パターン認識システム(恐らくトレーニングされたニューラル・ネットワーク)の使用、およびトランスデューサからの信号の斬新な分析のトランスデューサの特定の配置によって遂行される。
【0002】
新しいモデルへの占有者位置センサーの適用は、適用エンジニアリングと呼ばれる。占有者センサーのエンジニアリングが包含する適用はトランスデューサの位置を決定して、トランスデューサホルダーの設計、配線レイアウトの決定、トランスデューサ位置および角度のオリエンテーション上で寛容研究を実行すること、特別の乗り物モデル用の回路の設計、乗り物の中への回路の接続または統合、電子システム、また特別の乗り物モデルへの占有者センサー・システムを適応させすることでアプリケーションエンジニアリングの上記の様相はすべてシステム適応を例外として、新しいモデルへの任意の電子システムの適用エンジニアリングと著しく異ならない標準のプロセスである。しかしながら、システム適応は、それが特別の乗り物用に最適化されるシステムを作成することを相当な技術および専門知識、および斬新な技術の使用に要求するという点で独特である。
【0003】
(発明の背景)
占有者のサイズおよび位置、および事故の厳しさを説明するためにエアバッグに、あるいはそのエアバッグから流れるガスの量を調節するポンプがある。乗り物識別およびモニタリング・システム(VIMS)は米国で議論した。パテント Nos.5,829,782および5,943,295は、乗り物占有者の、あるいは後部に面する子供シートの存在および位置に基づいたそのようなポンプの働きをコントロールする。特別のモデルに内部モニタリング・システムを適応させて、高いシステム精度、およびより非常に詳しく下に議論されるような信頼度を達成する過程に関係がある。
【0004】
占有者識別および位置に、および衝突の厳しさによって、エアバッグのdeployment割合の自動調節は、「賢いエアバッグ」と名付けられた。賢いエアバッグの開発の中心となることは、現在の特許および特許出願に、特別モデルにそれらのシステムを適応させる、ここに記述された方法に占有者識別および位置決定システムである。賢いエアバッグの開発を完成するために、米国の1994年5月23日(番号08/247,760) の特許出願の「予期しての衝突を検知するシステム」のようなシステムはさらに望ましい。予期してに衝突を感じるインプリメンテーションに先立って、ニューラル・ネットワークワークの使用、衝突のタイプ、衝突加速署名の初期の側に基づいたその厳しさを識別する賢い衝突センサーは、開発されておりその後インプリメントされるべきだ。米国のパテント No. 5,684,701(種類)は、ニューラル・ネットワークに基づいた衝突センサーについて記述する。この衝突センサーは、他のすべての衝突センサーでのように、衝突がエアバッグのdeploymentを要求するために十分な厳しさであるならば、deploymentを始めるかどうか決める。さらに衝突を識別し、かつ占有者の特性および位置に(だけでなく)エアバッグdeploymentが一致することを可能にして、厳しさに関してそれをしたがって分類するように賢いエアバッグ衝突センサーに基づいたニューラル・ネットワークを設計することができる。また、衝突それ自身(これ、米国に記述されるパテント5,943,295番)の厳しさおよびタイミング。先の技術に関して、米国のパテントが言及される。
【0005】
Nos。 5,071,160(white at al.)、5,074,583(Fujita at al.)および5,118,134(Mattes at al.). しかしながら、システムが正確に乗り物の中のオブジェクトを識別し見つけることを可能にする、トランスデューサ位置を決定するかあるいは、アルゴリズムを引き出すか、他のシステム・パラメーター方法のこれらの特許の中でなされない。対照的に、即時の発明の1つのインプリメンテーションでは、興味のある搭乗者コンパートメント・ボリュームの全部分に対応するいくつかのミリ秒(milliseconds)の上のリターン超音波エコー・パターンは、多数のトランスデューサから分析され、搭乗者コンパートメントを占めるアイテム上の多くのポイントに距離情報を供給して、他のトランスデューサからの出力と時々結合した。
【0006】
この発明の教えの多くは、多数の教科書および専門的論文の中で教えられるようなパターン認識技術に基づく。この発明の診断の教えの中心となることは診断のモジュールが異常なパターンから正常なパターンを決定する方法、および利用可能な莫大な量のデータからどのデータを使用するべきであるか、それが決定する方法だ。これは人工ニューラル・ネットワークのようなパターン認識技術およびトレーニングを使用して、遂行される。多くの例を含むニューラル・ネットワークに関する理論は次のものを含む主題上でいくつかの本で見つけることができる:Techniques And Application Of Neural Networks, edited by Taylor, M. and Lisboa, P., Ellis Horwood, West Sussex, England, 1993; Naturally Intelligent Systems, by Caudill, M. and Butler, C., MIT Press, Cambridge Massachusetts, 1990; J. M. Zaruda, Introduction to Artificial Neural Systems, West publishing Co., N.Y., 1992 and, Digital Neural Networks, by Kung, S. Y., PTR Prentice Hall, Englewood Cliffs, New Jersey, 1993, Eberhart, R., Simpson, P. and Dobbins, R., Computational Intelligence PC Tools, Academic Press, Inc., 1996, Orlando, Florida、その、大部分はパターン認識技術に発展した。
【0007】
パターン認識の使用、あるいは特に、それがどう使用されるかは発明の中心となる。上記の引用された先の技術では現在の発明に割り当てられたそれ以外においては調整に基づくパターン認識が、ニューラル・ネットワークワークの使用によって例証されたとともに、乗り物の内部あるいは外部環境をモニターする際に使用のために言及されない。したがって、乗り物にそのようなシステムを適応させるために使用される方法はさらに言及されない。
【0008】
ここに使用されるようなパターン認識は、決定するためにオブジェクト(e.g。返された衝動あるいは受信だった衝動のパターンの代表者は揺れる、あるいは他の物理的性質、特定、に、または特性、またはそのオブジェクトの代表者)によって生成されるか、オブジェクトとの対話により修正される信号を処理する、すべてのシステムを一般に意味する、どれに、1セットのクラスのうちの1つにオブジェクトは属する。そのようなシステムは、オブジェクトが指定された1つのクラスのメンバーか、そうではないことを単に決めるかもしれません。あるいは、それは、指定されたクラスのより大きなセットのうちの1つにオブジェクトを帰するかそれがセット中のクラスのうちのいかなるもののメンバーではないことを知ることを試みるかもしれません。処理された信号は一般に情報の他の源は頻繁に含まれているが、聴覚の(超音波)あるいは電磁波(e.g、可視の光、赤外線放射線、キャパシタンス、あるいは電気界および磁界)に敏感なトランスデューサから来る一連の電気的信号だ。パターン認識システムは、パターンが認識されることを可能にする規則のセットの生成を一般に含んでいる。曖昧なロジック・システムはこれらの規則を作成することができる、統計相関性、あるいはニューラル・ネットワークのようなトレーニングされたパターン認識システムと同様にセンサー・フュージョン方法論によって。
【0009】
1つの、トレーニング可能、あるいは、ここに一般に使用されるようなトレーニングされたパターン認識システムは、様々な例にシステムをさらすことにより信号内に構成された様々なパターンを認識することを教えられるパターン認識システムを意味する。最も成功する、そのようなシステムはニューラル・ネットワークワークである。したがって、パターン認識アルゴリズムを生成するために、テスト・データは最初に得られ、それは返された波の多くのセットを構成する、あるいはオブジェクト(あるいは車内(つまりシートの上のスペース)でオブジェクトが位置しているだろうスペースから)およびそのオブジェクト(e.g。多くの異なるオブジェクトは各オブジェクトからユニークな波パターンを得るためにテストされる)の識別するの表示から、パターンを振る、そういうものとして、アルゴリズムは生成されコンピューター・プロセッサーに格納した。
【0010】
ここの目的のために「オブジェクト」という言葉の定義はレシーバーによって使用の間に受け取られた波パターンに基づいたオブジェクトの同一性となるもの。例えば、子供シートに面する後部は前方の面する子供シートとは異なっているオブジェクトである。そして1つの、位置からはずれて、大人は通常着席した大人とは異なっているオブジェクトである。ここに使用されるように識別することは、項目セットあるいはクラスにオブジェクトが属することを決めることを一般に意味するだろう。クラスは(例えば)子供シートに面する後部をすべて含んで、人間の占有者すべての牽制あるいはすべての人間の占有者、ない、現職、システムの目的に依存する子供シートに面する後部の中で。特別の人が認識されることになっている時に、セットあるいはクラスは単一の要素(つまり認識される人)だけを含む。乗り物あるいは占有者の中のオブジェクトあるいはシートの占めるアイテムは、人間あるいは犬のような生きている占有者、プラントのような別の生きている有機体、食料品店の箱かバッグのような無生物あるいは空の子供シートである。
【0011】
位置からはずれて、占有者のために使用されるように、一般にするだろう、手段、占有者、一方のドライバーあるいは搭乗者は、deploymentに先立って占有者保護装置(エアバッグ)に十分に接近している。事故によってよりも、彼または彼女はdeployment出来事それ自身によって重傷する。それは、さらに占有者がエアバッグのdeploymentの有益な抑制する影響に到達するためには適切に位置しないことを意味するかもしれません。エアバッグに接近している占有者に関しては、占有者頭あるいは胸が、エアバッグ・モジュールのdeploymentドアから約5インチのようなある距離より接近している場合、これが典型的に生じる。実際の距離、エアバッグdeploymentが抑えられるべき場合、値は、エアバッグ・モジュールの設計に依存し、ドライバー・エアバッグより搭乗者エアバッグには典型的に一層である。
【0012】
ここに使用されるようなトランスデューサは、発信機およびレシーバーのコンビネーションを一般に意味する。来る、ケース、他のものでは、互いに隣接している別個の2つの装置が使用されただろう間、同じ装置は発信機およびレシーバーとして両方に役立つ。ある場合には、発信機が使用されない。また、そのような場合、トランスデューサはレシーバーだけを意味するだろう。トランスデューサは、例えば、容量性、誘導、超音波、電磁気(アンテナ、CCD、CMOS配列)、測定する装置あるいは感じる装置に重みを加える。
【0013】
ここに使用されるような適応は、特別の占有者を感じるシステムが設計されており、特別モデルのために整えられる方法を表わす。それは、様々なトランスデューサの数、種類および位置が決定されるプロセスのようなものを含んでいる。パターン認識システムについては、それが、パターン認識システムが希望のパターンを認識することを教えられるプロセスを含んでいる。この接続では、それが、(1)トレーニング (調整)、(2)トレーニングのために使用されたデータ・ベースの組立て、特別のシステムをテストし有効にすること、あるいは選ばれたニューラル・ネットワークワークの場合には特別のネットワークワーク・アーキテクチャーの方法、(3)環境上の影響がシステムに組み入れられるプロセス、および(4)データの前処理(前プロセシング)あるいはポスト処理(ポストプロセシング)を決定する任意の過程。上記のリストは実例となう。そして徹底的でない基本的に、適応は、正確に識別し、占有者の位置あるいは他のものが乗り物の中で反対することを決めるシステムを作成する、特別の乗り物に、トランスデューサおよび情報の源を適応させるために保証されるステップをすべて含んでいる。
【0014】
予期し感じることのオブジェクトに関して使用された時接近する用語あるいは別のものに接近する乗り物で記述の中でここに、予期センサー・システムがある乗り物へのオブジェクトの相対的な運動を一般に意味する。したがって、木を備えた側面のインパクトでは、木は、乗り物の側に接近し乗り物を密着させることと見なされる。言いかえれば、一般の中で使用される座標系は目標乗り物に存する座標系になる。目標乗り物は密着させられている乗り物である。この協定は、一般的な記述がその場合をすべてカバーすることを可能にする、どこで(i)、動いている乗り物、静止している乗り物の側の中へのインパクト、(ii)、両方の乗り物が移動している。それが衝撃を与える。あるいは(iii)、静止している乗り物の側面に移動している木または壁。ここに、波センサーか波トランスデューサも任意の装置(それは波を感じる)で、超音波、あるいは電磁気。電磁波センサーは、例えば、電磁気のスペクトルの任意の部分を感じる装置を含んでいる、から、数ヘルツまでは紫外線。最も一般に用いられている種の電磁波センサーはCCDとCMOSの配列を含んでいる。このために、感じる、可視、または赤外線、ミリメートル波およびマイクロ波レーダー、そして容量性あるいは電気的なセンサー、およびスペースを占めるオブジェクトの誘電率に依存する磁界モニタリング・センサー。この点では、例えば米国の特許:Kithil、5,366,241、5,602,734、5,691,693、5,802,479および5,844,486、Jinno、5,948,031.
【0015】
それがモニタリング・システムを強健で確実で、正確にするので、ニューラル・ネットワーク(すなわち神経の曖昧なシステム)の使用はトレーニング方法のような特別の乗り物にこれを適応させる、パターン認識技術および方法として、この発明にとって重要である。ニューラル・ネットワークワーク・プログラムによって作成され、生じるアルゴリズムは通常Cコンピュータ言語で書かれたコードの数百行だけで、一般的な少数のラインにある。米国の技術のパテントNos. 5,008,946(Ando)、5,298,732(Chen)および5,305,012(Faris)がインプリメントされる。その結果、それらを自動推進の適用には実際的にする、低コストで生じるシステムをインプリメントすることは容易である。例えば、1年当たり100万ドルの中の1ドルに未満で超音波のトランスデューサのコストがあると予想される。同様に、ニューラル・ネットワークおよび類似したトレーニング可能なパターン認識技術を備えたインプリメンテーションが1年当たり100万ドルの中の5ドルに未満で典型的にかかる、低コスト・マイクロプロセッサーの使用を許している一方、参照が上記の付けられた特許の技術のインプリメンテーションは、高価なマイクロプロセッサーを要求する。
【0016】
現在の発明は、ニューラル・ネットワークのようなトレーニング可能なパターン認識アルゴリズムを開発する、精巧なソフトウェアを使用する。通常、様々な特徴抽出技術を使用して、下に議論されるように、データはあらかじめ処理される。また、結果はシステム精度を改善するためにポスト処理される。ニューラル・ネットワークをソナー合図をすると使用するそのようなパターン認識システムの自動推進でない例は:
Gorman, R. P. and Sejnowski, T. J. “Analysis of Hidden Units in a Layered Network Trained to Classify Sonar Targets”, Neural Networks, Vol. 1. pp. 75−89, 1988, and “Learned Classification of Sonar Targets Using a Massively Parallel Network”, IEEE Transactions on Acoustics, Speech, and Signal Processing, Vol. 36, No. 7, July 1988. フィーチュア抽出技術の例は米国の特許で少しもなく見つけることもできる:“Process and Apparatus for the Automatic Detection and Extraction of Features in Images and Displays” to Green et al. 他のものの例はもっと進み、米国の特許で効率的なパターン認識技術を少しもなく見つけるために:Examples of other more advanced and efficient pattern recognition techniques can be found in U.S. Patent No. 5,390,136 entitled “Artificial Neuron and Method of Using Same” and U.S. Patent No. 5,517,667 entitled ”Neural Network That Does Not Require Repetitive Training” to Wang, S. T.. Other examples include U.S. Patent Nos. 5,235,339 (Morrison et al.), 5,214,744 (Schweizer et al), 5,181,254 (Schweizer et al), and 4,881,270 (Knecht et al).
一般に、レーザーおよび非レーザー光学のシステムはイメージの次元の2つの平面内のオブジェクトの位置の決定でよい、また、走査モードにおけるパルス・レーザー・レーダー・システムが、飛行の時間の測定によりレシーバーからのイメージの各部分の距離を決定することができる、範囲ゲーティング技術によって。非レーザーシステムを備えた距離を決定することはさらに可能である。あるいは立体画法的(stereographically)に2のレシーバーを別々に間隔を置き、使用される。また、ある場合には、視界の分野での単なる位置は例えばエアバッグに関する位置を評価するために使用することができる。最終的に、1つの、最近開発されていた、定量をよく律動的に送った、ダイオード・レーザーはさらに米国の臨時の特許の出願で議論されるような低費用の距離測量を提供する。 60/114,507、ファイルされた1998年12月31日。
【0017】
単純な電子回路が設計されていることを比較的低い音速が可能にし、最小のマイクロプロセッサー能力が要求されるので、聴覚のシステムは距離測量でさらに有効である。 z軸がトランスデューサから占有者まである場合、座標系が使用される場合、音響学は、単一のCCDかCMOS配列を使用する単純な光学のシステムがxとyの次元の測定でよい間、z次元を測定することでよい。音響学と光学のコンビネーションは、1つの位置から、一般に割り当てられる米国のパテントで議論されるような低コスト・コンポーネントで3つの測定がすべて作られることを可能にする。 Nos. 5,845,000と5,835,613.
【0018】
これらの考えを使用するシステムの1つの例はレンズおよびレシーバー配列(e.g)と結び付けられた、赤外線光で助手席を氾濫させる、光学のシステムである。CCDあるいはCMOS配列、それはCCDかCMOSの出力をデジタル化し、Artificialニューラル・ネットワークワーク(Artificial Neural Network)(ANN)あるいは分析用の他のパターン認識システムにそれを与える、反映された光、およびADトランスデューサ(ADC)を受け取り表示する。このシステムは、助手席に位置したオブジェクトへの距離の測定のために超音波の発信機およびレシーバーを使用する。受信トランスデューサは、ADCにそのデータを供給する。また、そこから、変換されたデータは、ANNに向けられる。同じANNはANNが分析するために十分な三次元のデータを提供して、両方のシステムのために使用することができる。低コスト・コンポーネントを使用するこのシステムは正確な識別および単独で作用する一方のシステムによって可能でない距離測量を許す。調整された配列システムがシステムの聴覚の部分に加えられる場合、光学の部分はドライバーの耳の位置を例えば決定することができる。また、調整された配列は、位置に狭いビームを向けることができ、占有者の耳への距離を決定することができる。
【0019】
距離測量のためのultrasoundの使用は多くの長所を持つが、さらに、それはいくつかの欠点を持っている。最初に、音速は、占有者の位置がおよそ10 ミリ秒(milliseconds)に更新することができる割合を制限する。また、ほとんどの場合に十分が、占有者の位置が乗り物衝突の間に追跡されることになっている場合、例外である。次に、超正常な波は、ヒーターか空気調節装置が操作される場合、あるいはトランスデューサを過ぎた空気の高速気流がある場合、生じることができる空気密度の変化によって回折(diffract)される。第3に、その波長によって、トランスデューサ(それらは高いQである)によって制限されている、装置を合わせた。典型的に、正常なことの解決は3インチまで約2(約)である。最終的に、超音波のトランスデューサからのフィールドは、望まれないオブジェクトあるいは表面からの影がデータに雑音を加えるようにコントロールすることが困難である。
【0020】
超音波学は参照が上記の付けられた特許および特許の出願、および米国の項目に記述されるような自動車の搭乗者コンパートメントの内部のモニターのためにいくつかの構成の中で単独で使用することができる。パテント No. 5,943,295. この発明の教え、超音波の最適の数および位置、および光学のトランスデューサの使用は、特別モデルの適応プロセスの一部として決定される。
使用されるトランスデューサの数にかかわらず、より詳細に下に議論されるように、トレーニングされたパターン認識システムは、上に定義されたとともに、識別し分類するために使用される、そして見られるいくつかのケース、照らされたオブジェクトおよびその構成要素に。
【0021】
この技術のためのアプリケーションは多数である。しかしながら、主要な焦点は位置に直面する後部の占められた子供シートの存在の検知のために参照が上に付けられた特許および特許の出願中のシステムを適応させする過程、および生じる装置である。あるいは1つの、位置からはずれて占有者、および正常にすわる場所の占有者の検知。前の2つのケースでは、占有者保護装置(エアバッグ)のdeploymentがコントロールされ恐らく抑えられるかもしれないし、後のものでは、それがコントロールされ可能になるように、システムが設計されている。
【0022】
最初の生成占有者を感じるシステム(それはここに示された教えを使用して、様々な乗り物モデルに適応される)の好ましい1つのインプリメンテーションは、超音波の占有者位置センサーである。このシステムはパターンを認識するためにArtificialニューラル・ネットワーク(Artificial Neural Network)(ANN)を使用し、それは、一方のエアバッグとして識別するようにトレーニングされた、可能、あるいはエアバッグの作動条件を不能にする。パターンは、エリアを着席させる正面の搭乗者をカバーする、超音波の4台のトランスデューサから得る。このパターンは、助手席エリアのオブジェクトを離れて弾む、超音波エコーから成る。 4台のトランスデューサの各々からの信号は、リターン・エコー(それらはエレクトロニクスによって処理される)の電気的なイメージから成る。電子処理は、信号の個別化(サンプリング)および数字化を後に続けて、増幅、対数の圧縮、整流および復調(バンドはフィルタリングを渡する)を包含する。要求されたただ一つのソフトウェア処理、人工ニューラル・ネットワークにこの信号を供給することができる前に、正常化(つまり、数に0と1の間に入力を写像して)であろ。これは公平な量の処理だが、情報がすべて等しく扱われるので、生じる信号は未加工であるとなお考えられる。
【0023】
(本発明の目的及び概要)
一般に、本発明の目的は、車両内の物体の存在、位置及び/又は姿勢を同定するための新規で改善された方法を提供することである。
本発明の他の広い目的は、エアバッグが展開されたときに後ろ向きのチャイルドシートに衝撃を与える場合にエアバッグ等の占有者保護装置が展開するのを防ぐために、占有された後ろ向きチャイルドシートの存在を正確に検出するためのシステムを提供することである。
また本発明の他の広い目的は、エアバッグがその初期展開相の間に占有者の頭又は胸を圧迫して占有者に傷害や死亡させる可能性がある場合にエアバッグ等の1又は複数の占有者保護装置が展開するのを防ぐために、位置のずれた占有者の存在を正確に検出するシステムを提供することである。
【0024】
この発明は、その一部及び搭乗者コンパートメントの他の目的物、特に後ろ向き位置の占有されたチャイルドシート又は位置のずれた占有者を含む占有者を、車両内部に超音波又は電磁波を照射することにより、例えば、波発生装置からの照射をシートの上部空間に伝達し、車両搭乗者コンパートメントに特定の予め決定された最適位置に正しく配置された2又はそれ以上のトランスデューサを用いてシート上部空間を通ることにより変調した照射を受信することによって同定し、位置決めし、及び監視するために設計されたシステムである。より詳細には、本発明は、これまで不可能であった正確な認識を達成するために、適当に配置され取り付けられた複数のトランスデューサを含み、波を変調させる任意の目的物からの受信した照射を分析するシステムに関する。受信機からの出力は、内容物を分類、同定及び/又は位置決めし、及び/又は例えば後ろ向きチャイルドシートの向きを決定するために、トレイン(train)されたパターン認識技術を用いた適当な計算機手段によって分析される。一般に、同定及び監視システムによって得られた情報は、車両内の幾つかの他のシステム、部材又は装置、特に搭乗者及び/又はドライバーエアバッグシステムの操作に影響を与えるように使用され、エアバッグは、フロントエアバッグ、サイドエアバッグ、膝クッション、又はそれらの組み合わせを含みうる。しかしながら、得られた情報は、複数の他の車両システムの操作を調整又は影響を与えるために使用することもできる。
【0025】
本発明に従う車両内部監視システムは、膨張式エアバッグなどの占有者保護装置を備えた自動車車両の搭乗者コンパートメントに搭載され、衝突センサーが保護装置が展開すべきであると決定するのに十分な激しさで車両が衝突すると、システムは、チャイルドシートに後ろ向きに配置された子供が存在するか否かを(通常は展開に先立って)決定し、もし存在する場合は、シグナルがコントロール回路に送られてエアバッグがコントロールされ、最も現実的には衝突において展開が不可能にされるか展開しない。圧縮展開ではなく、展開は占有された後ろ向きのチャイルドシートに有意な保護を与えると理解すべきである。本発明の教示を用いて開発されたシステムは、エアバッグに対する車両占有者の位置も決定し、占有者が、エアバッグの展開によって傷害を受ける可能性がある位置にいる場合は、エアバッグをコントロールして、展開を不可能にしうる。上記のように、展開は不可能にする必要はないが、位置のずれた占有者に保護を与えるようにコントロールしうる。
【0026】
本発明に従う方法の概念的目的及び利点は以下のことである:
1.自動車の特定のシートにおける後ろ向きのチャイルドシートの存在を認識するためのシステムを開発及び改作する信頼できる方法を提供すること。
2.自動車の特定のシートにおける人間の存在を認識するためのシステムを開発及び改作する信頼できる方法を提供すること。
3.自動車における占有者の位置、速度又は大きさを決定するためのシステムを開発及び改作する信頼できる方法を提供すること。
4.占有者がずれた位置にいるか、ずれようとしており、展開したエアバッグにより傷害を受け易くなることを適時に決定するためのシステムを開発及び改作する信頼できる方法を提供すること。
5.搭乗者コンパートメント内部に、目的物の分類及びそれらの位置がトランスデューサによって発生する信号から高い信頼性で得られる特定の位置にトランスデューサを配置する方法を提供すること。
6.シートベルトペイアウト(payout)センサー、シートベルトバックルセンサー、シート位置センサー、シートバック位置センサー、及び重量センサーを含む種々のトランスデューサをシステムに組み込む方法を提供し、電磁気、超音波又は他の照射センサーと組み合わせて使用した時に、システムを、高い信頼性の占有者存在及び位置システムを提供するように改作すること。
【0027】
従って、車両の搭乗者コンパートメントにおけるシートの占有状態を決定するためのシステムを開発する方法の第1の実施態様は、車両内にトランスデューサを取り付け、当該トランスデューサがシートの占有状態によって影響を受けるものであり、各々のデータセットが異なるシートの専有状態を表し、シートが当該専有状態にある間にトランスデューサからのデータを受信し、トランスデューサからのデータを処理することにより形成される複数のデータセットを含む少なくとも1つのデータベースを作成し;そして、シートの占有状態を表わすデータセットを入力した際にシートの占有状態を示す出力を発生することができる少なくとも1つのデータベースから第1のアルゴリズムを作成する工程を含んでなる。新たなデータベースは、例えばm、アルゴリズムが車両のコントロール回路にインストールされた後に車両を使用している間に形成される。第1のアルゴリズムは、アルゴリズム作成プログラムにデータベースを入力し、そして、第1のアルゴリズムを作成するアルゴリズム作成プログラムを実行させることにより作成してもよい。第1のアルゴリズムは、ニューラル・ネットワーク・アルゴリズムであってよく、その場合は、ニューラル・ネットワーク・アルゴリズムを作成する際にバックプログラム法を使用できる。
【0028】
シートの占有状態は、占有又は非占有の後ろ向き幼児シート、前向き人間、位置のずれた人間、占有又は非占有の後ろ向きチャイルドシート、及び空のシートを含む群から選択される目的物によるシートの占有を含む。またシートの占有状態は、複数の姿勢の目的物及び/又は新聞、本、地図、瓶、玩具、帽子、コート、箱、鞄及び毛布を含む非排他的な群から選択される少なくとも1つの付属品による占有を含む。
データからデータセットを形成する前にデータを前処理してもよい。これは、データセットにおけるデータの特徴から作成されたデータを使用してもよく、この特徴は、正規化係数、ピークに先立つデータ点の数、ピークの総数、及びデータセットの平均又は分散を含む群から選択されうる。また、データは、正規化、切り捨て、対数変換、シグモイド変換、データの時間閾値化−平均化、フーリエ変換及び/又はウェーブレット変換を用いて数学的に変換してもよい。さらに、前処理は、一のデータセットのデータを他のデータセットの対応するデータから差し引いて、差分データの第3のデータセットを作成してもよい。
【0029】
処理工程は、トランスデューサからのアナログデータをデジタルデータに変換し、複数のトランスデューサからのデジタルデータを組み合わせて各トランスデューサからのデータ列を含むベクトルを形成する工程を含んでもよい。その場合、第1のアルゴリズムは、新たなデータセットからのベクトルの入力に際して、車両シートの占有状態を表す出力を生成するように作成される。データベースのベクトルを正規化し、各ベクトルを含むデータの全ての値が最大値と最小値の間になるようにすることができる。
車両の搭乗者コンパートメントにおける車両シートの占有状態を決定するためのシステムを開発する他の方法は、搭乗者コンパートメントの種々の位置における種々の占有物体を表すデータを得ることによりデータセットを作成し、データの少なくとも一部を操作してデータセットにおける最大データ値の大きさを最小データ値に対して縮小させ、複数のデータセットを含むデータベースを形成し、そして、当該シートの占有状態を表すデータセットを入力した際に車両シートの占有状態を示す出力を生成することのできるデータベースからアルゴリズムを作成する工程を含んでなる。データを操作する工程は、概算対数変換関数を用いてもよい。
【0030】
本発明に従って、車両シートの占有状態を決定するためのシステムの開発に使用するためのデータベースを開発する方法は、車両内にシートの占有状態によって影響を受けるトランスデューサを取り付け、シートを初期の占有状態とし、トランスデューサからデータを受信し、トランスデューサからのデータを処理して車両シートの初期占有状態を表すデータセットを形成し、シートの占有状態を変化させて他のデータセットを形成するデータ集積工程を繰り返し、各々が異なるシートの占有状態を表す少なくとも1000データセットを第1のデータベースに集積し、第1のデータベースのデータセットの殆どについてのシートの占有状態を正しく決定する第1のデータベースからアルゴリズムを作成する工程を含む。アルゴリズムの作成に使用しなかったデータセットの第2のデータベースを用いてアルゴリズムを試験される。アルゴリズムによって正しく決定されなかった第2のデータベースにおける占有状態が同定され、正しく決定されなかった状態に類似する占有状態を含む新たなデータが集積される。新たなデータを第1のデータベースと組み合わせて、組み合わせたデータベースに基づいて新たなアルゴリズムを作成し、そして、この工程をアルゴリズムの所望の精度が達成されるまで繰り返す。
【0031】
車両の搭乗者コンパートメントシートの占有状態を決定するためのシステムを開発する他の方法は、車両に複数の超音波トランスデューサを取り付け(これらのトランスデューサはシートの占有状態によって影響を受ける)、各トランスデューサからアナログ信号を受信し、トランスデューサからのアナログ信号を処理して、車両の占有状態を示す各トランスデューサからの複数のデータ値を含むデータセットを形成し、前記データ処理がデジタルデータのデータセットを生成するためのトランスデューサデータの復調、サンプリング及びデジタル化を含み、複数のデータセットを含むデータベースを形成し、そして、シートの占有状態を表わす新しいデータ・セットの入力の際にシートの占有状態を示す出力を生成することができるデータ・ベースから少なくとも1つのアルゴリズムを作成する工程を含んでなる。
【0032】
車両の搭乗者コンパートメントの車両シートの占有状態を決定するためのシステムを開発する更に他の方法は、車両に1組のトランスデューサを取り付け、トランスデューサからデータを受信し、トランスデューサからのデータを処理して車両の占有状態を表すデータセットを形成し、複数のデータセットを含むデータベースを作成し、新たなデータセットの入力に際して車両シートの占有状態を示す出力を生成することができるデータベースからアルゴリズムを作成し、システム精度の基準を開発する工程を含む。トランスデューサセットから少なくとも1つのトランスデューサを除去し、減少した数のトランスデューサからのみのデータを含む新しいデータベースを作成し、新しいデータベースに基づいた新しいアルゴリズムを開発し、そして新システム精度を決定するための新しいアルゴリズムを試験する。トランスデューサ除去、アルゴリズム開発及び試験の工程は、求められる正確さを有するアルゴリズムを作成する最小数のセンサーが決定されるまで継続する。トランスデューサは、超音波トランスデューサ、電磁気センサー、光学センサー、容量センサー、重量センサ、シート位置センサー、シートバック位置センサー、シートベルトバックルセンサー、シートベルトペイアウトセンサー、赤外線センサー、誘導センサー、電場センサー及びレーダーセンサーからなる群から選択される。
【0033】
車両のドライバー及び助手席の占有状態を決定するためのシステムを開発する更に他の方法は、異なる送信及び受信周波数を持つ超音波のトランスデューサを車両内に取り付け、トランスデューサからのデータを受信し、トランスデューサからのデータがを処理して車両の占有状態を表すデータセットを形成し、複数のデータセットを包含する少なくとも1つのデータベースを作成し、そして、新しいデータセットの入力の際に車両シートの占有状態を示す出力を生成することができる少なくとも1つのデータベースからアルゴリズムを作成する工程を含んでなる。
これら及び他の目的及び利点は、本発明の車両同定及び監視システムの好ましい実施態様の以下の説明から明らかになるであろう。
添付の図面は、本発明の教示を用いて開発及び改作されたシステムの実施態様の例示であり、特許請求の範囲に包含される発明の範囲を制限することを意味しない。特に、以下の例示はシステムを記述する目的でフロント搭乗者シートの監視に限られている。当然のことながら、本発明は車両内の他の着席位置、特にドライバー位置のシステムにも同様に適用される。
【0034】
(好ましい実施態様の詳細な説明)
システム適合は、それにより特定の車両についてのハードウェア配置及びソフトウェアアルゴリズムが決定されるプロセスを含む。各車両モデル又はプラットホームは、異なるハードウェア配置及び異なるアルゴリズムを持つ可能性が高い。このプロセスを構成する種々の態様は以下の通りである:
・トランスデューサの取り付け位置及び照準の決定。
・トランスデューサ場の角度の決定。
・アルゴリズム作成を補助するためにNeuralWareから市販されているもの等のニューラルネットワークアルゴリズム作成プログラムの使用。
・ニューラルネットワークトレーニングを目的とする車両におけるデータ集積の工程。
・データ集積の間の車両座席などの自動的移動の方法。
・高いシステム信頼性を達成するのに必要な獲得及びセットアップすべきデータ量の決定、典型的には数十万ベクトル。
・温度勾配などの変動する環境条件でのデータの集積。
・各データセットアップの写真撮影。
・異なるデータベースの構成及び三次元データベースの使用。
・前向き人間についてより高い可能性を与えるためにバイアスされるデータを決定する方法。
・データ一体性を確実にするための座席、シートバック、ヘッドレスト、ウィンド、バイザー、アームレスト位置を含む車両セットアップの自動的記録。
・トランスデューサ配置が変動しないことを確認するための日々のセットアップの使用。
・悪いデータをデータベースから削除する方法。
・トレーニング工程におけるデータのフーリエ変換及び他の前処理の導入。
・例えば分類及び位置についての複数のネットワークレベルの使用。
・複数のネットワークの平行的使用。
・処理後フィルタの使用及びこれらのフィルタの特性。
・ファジー理論及び他の人間知能に基づく規則の付加。
・例えばニューラルネットワークを用いたベクトル誤差の修正方法。
・パターン認識アルゴリズム作成システムとしてのニューラルワークの使用。
・トレーニングからのバックプロパゲーションニューラルネットワークの使用。
・ベクトル正規化の使用。
・以下を含む特徴抽出技術の使用:
ピーク以前のデータ点の数。
正規化係数。
ピークの総数。
ベクトル平均及び偏差。
・遺伝的アルゴリズムなどの他の計算機知能システムの使用。
・データスクリーニング技術の使用。
・旧及び新ネットワークの概念を含む安定なネットワークの開発に使用される技術。
・安定なネットワークに到達する方法で消費される時間又は繰り返し数。
・16シートといった最初に集積される少量のデータに次いで完全にデータ集積される順序の技術。
【0035】
システムの適合工程は車両モデルの外観から開始される。任意の存在するセンサー、例えば座席位置センサー、シートバックセンサー等は、システムへの導入のための直接的な候補で亜r。消費者からの入力は、どのタイプのセンサーが最終システムに許容されるかを決定するであろう。これらのセンサーは、座席構造に取り付けられた重量センサー、パッド型センサー、圧力型重量センサー、座席前又は後位置センサー、座席垂直位置センサー、座席角度位置センサー、シートバック位置センサー、ヘッドレスト位置センサー、超音波占有者センサー、光学占有者センサー、容量センサー、誘導センサー、レーダーセンサー、車両速度及び加速度センサー、ブレーキセンサー、シートベルト力、ペイアウト及びバックルセンサー等を含む。次いで候補となるセンサーアレイが選択され、車両に取り付けられる。
また、車両は人間によるデータ入力を最小にするように構成される。よって、座席、窓、サンバイザー、アームレストなどの車両の種々の部材の位置は自動的に記録される。また、データを取り込んでいる間の占有者の位置は、直接超音波範囲センサー、光学範囲センサー、レーダー範囲センサー、光学トラッキングセンサー等の種々の技術を介して完全に記録される。集積された各ベクトルい対応するセットアップ又は幾つかの適当な頻度で写真を撮るために設置される。
【0036】
車両セットアップの標準的な組は、最初の試験的なデータ集積目的のために選択される。典型的には、最初の試験は20,000から100,000の間からなる。
最初のデジタルデータ集積は、ここで試験セットアップマトリクスのために進める。データはトランスデューサから集積され、デジタル化され、組み合わされてニューラルネットワークプログラムによる分析のための入力データのベクトルを形成する。この分析は、100%に近いトレーニング精度を生ずるべきである。これが達成されない場合、システムに付加的なセンサーを追加するか、配置を変化させ、データ収集と分析を続ける。
搭乗者コンパートメントにおける目的物の種々の着席状態に加えて、試験データベースは熱灯及びエアーコンディショナー及びヒーターの操作によって生ずる温度勾配といった環境効果を含む。そのようなマトリクスのサンプルを補足1に示す。ニューラルネットワークが試験データベース上でトレインされた後、試験データベースは誤差を含む結果を生ずるベクトル(それは悪いデータと考えられる)についてスキャンされる。現在のケースに伴うベクトルと共にこれらのベクターの実験は写真と比較され、誤差データが存在するか否かが決定される。その場合、誤差データの原因を決定する努力がなされる。原因が見出された場合、例えば電力ライン上の電圧スパイクがデータを破壊した場合には、当該ベクトルをデータベースから削除し、データ修正工程を正して、この妨害を除去する努力がなされる。
【0037】
このとき、幾つかのセンサーをセンサーマトリクスから除外してもよい。これは、どの影響が結果をもたらすかを知るための分析から選択的にセンサーデータを削除することにより、ニューラルネットワーク分析の間に決定される。しかし、センサーが車両に最初に導入されると、将来のデータ集積及び分析において全てのセンサーを使用するのに付加的な出費が殆どいらないので、ここで注意しておかなければならない
この第1相で開発されたニューラルネットワークは、次の相におけるデータ集積の間に使用され、同時に集積された新たなベクトルの一体性のチェックをする。場合によっては、電圧スパイク又は他の環境的妨害は、幾つかのトランスデューサからのデータに瞬間的な影響を及ぼす。この事象をとらえるのは、第1にそのデータをデータベースから削除するために、第2に誤差データの原因を孤立させるために重要である。
【0038】
集積すべき次のデータの組はトレーニングデータベースである。おれは、最初に集積される最大のデータベースであり、例えば補足1に列挙するセットアップを包含する。トレーニングデータベースは、500,000又はそれ以上のベクトルを含み、ニューラルネットワークのトレーニング開始に使用される。これを考慮に入れて、独立及び確認データベースの補足1に従って付加的なデータが集積される。トレーニングデータベースは、車両内で起こりうることが知られた全ての着席状態を均一にカバーするように選択される。独立データベースは、トレーニングデータベースの構築と類似であってもよく、又は確認データベースの占有状態分布により近く適合するように改良されてもよい。ニューラルネットワークトレーニングの間、独立データベースは、ニューラルネットワークの精度をチェックするために使用され、独立データベースに対して測定したときに、その精度が以前のネットワーク構築より低ければ、候補としたニューラルネットワーク設計を拒否する。
独立データベースは、ニューラルネットワークのトレーニングで実際に使用されないが、それにも関わらず、それはネットワーク構造に有意な影響を及ぼすことがわかった。従って、第3のデータベース、確認又は現実世界データベースは、選択したシステムの最終的な精度チェックに使用される。確認データベースは、道路上の現実の自動車における車両占有に密接に関係するセットアップから取られる。最初は、トレーニングデータベースは3つのデータベースの最大のものである。時間及び供給源が許容するならば、100,000ベクトルから始まる独立データベースは、トレーニングデータベースとほぼ同様の大きさまで成長する。一方、確認データベースは、典型的には50,000ベクトルから開始される。しかし、ハードウェア配置は凍結されているので、確認データベースは成長を続け、幾つかの場合には、実際にはトレーニングデータベースより大きくなる。これは、プログラムの最後近傍で、車両が高速道路上で操作され、データが現実世界の状況で集積されるからである。現実世界の試験においてシステムの不備が発見された場合、これは確認データベースと同様に、トレーニング及び独立データベースの両方について付加的なデータの取り込みを導きうる。
【0039】
全てのトランスデューサから入手可能な全てのデータを用いてネットワークがトレインされると、ネットワークの精度は100%に極めて近くなると予測される。システムのトレーニングで使用された全てのトランスデューサを実際の車両モデルへの設置に使用するのは通常は現実的ではない。これは主に、コスト及び考慮すべき事項の複雑さによる。通常は、自動車製造者は、車両の製造における設置のために幾つのセンサーが許容されるかの考えを持っている。例えば、データは、20の異なるトランスデューサを用いて集積できるが、自動車製造者は最終的な選択を6つのトランスデューサに制限する。従って、次の工程は、例えば再考のシステム精度を達成するための6つのセンサーの最良の組み合わせを決定するためにセンサーを徐々に削除することである。理想的には、一連のネットワークは、20の利用可能なものからの6つのセンサーの全ての組み合わせを使用してトレインすることである。この作業は法外な長時間を要する。或る種の束縛が剪定工程を開始するために最初からシステム中に入れられる。例えば、電子装置を複雑にするため、同じシステムに存在する光学及び超音波センサーの両方を持つことは思い付かないであろう。実際に、自動車製造者は、最初は光学系が高価すぎるので、考慮しないことを決定した。従って、光学センサーの導入は、コストの関数として精度の低下を決定する方法を提供する。種々の束縛が、通常は最初のセンサー群のかなりの数を即座に除去することを可能にする。この除去及び残ったセンサーへのトレーニングは、結果的に精度の低下をもたらす。
【0040】
次の工程は、各センサーを一度に一個づつ除去して、何れのセンサーがシステム精度に最小の影響を与えるかを決定することである。次いで、この工程は、センサーの数が消費者に望まれる数まで減少されるまで繰り返される。この時点で、工程を逆転させて、以前の段階で除去されたセンサーを一個づつ追加刷る。例えば、最初の剪定工程で重要でないことが明らかになったセンサーが後に極めて重要になってくることもある。このようなセンサーは、種々の他のセンサーの存在により少量の情報を追加してもよい。しかし、種々の他のセンサーが更に他のセンサーより少ない情報しか生じない場合は、剪定工程の間に除去してもよい。従って、サイクルの初期に除去されたセンサーの再導入は有意な効果を持ち、システムを構成するセンサーの採取的な選択を変化させる場合もある。
上記のシステムを構成するセンサーの数の低減方法は、異なる状況で適用可能な種々の方法の一つでしかない。幾つかの場合、モンテカルロ法又は他の統計的方法が保証されるが、他の場合では、実験的方法の設計が最も成功することが実証された。多くの場合、この操作をコントロールする操作者は熟練し、どのセンサーの組が最も良好な結果を生ずるかを直感的に知っている。工程の最中に、異なるコンピュータで複数のケースを実行させることは異常なことではない。また、この工程の間に、精度のコストのデータベースが形成される。自動車製造者は、例えば、最終システムで合計6つのトランスデューサを持つことを望むが、1又は複数のセンサーの追加がシステムの精度をかなり向上させるという事実を考慮して、製造者は決心を変えうる。同様に、選択されるセンサーの初期数は6であるが、分析により4つのセンサーが6つと有意に同様の精度を与えることが示されたので、他の2つを除去してコスト削減してもよい。
【0041】
選定過程を行う間に、車両は種々の路上試験を受け、消費者にプレゼンテーションされる。路上試験は、基本的なトレーニングが行われるところでない様々な場所での走行である。予想外の環境的要因がシステムの性能に影響することが見出され、従って、これらの試験は重要な情報を提供する。従って、試験車両に設置されるシステムは、記録システム誤差の許容量を持つべきである。この記録は、誤差を生じうる車両セットアップの写真並びに車両上の全てのセンサーの出力を含む。このデータは、後に分析され、トレーニング、独立又は確認の何れのセットアップが修正を必要とするか、及び/又は何れのセンサー又はセンサーの位置が修正を必要とするかを決定する。
センサーの最終セットが選択されれば、車両は高速道路上での現実世界の試験及び消費者展示をされる。任意の特徴が再度記録される。しかし、この場合、システムのセンサーの総数がセンサーの初期セットよりかなり減少しているので、或る程度の誤差が予測される。これらの誤差が予測される場合、消費者に注意深く概観され、消費者がシステム誤差モードを認識し、これらの誤差モードで許容されるシステムを調製する。
【0042】
記述したシステムに限って言えば、単一のニューラルネットワークの使用に基づいている。複数のニューラルネットワーク及び他の認識システムの使用が必要であることが多い。例えば、車両シートの占有状態を決定するために、実際に2つの要件が存在する。第1の要件は、何がシートを占有しているかを確認することであり、第2の要件は、目的物の位置を確認することである。一般的に、車両シートを、例えば前向きの人間又は占有又は非占有の後ろ向きのチャイルドシートを特定するために多くの時間、典型的には数秒間がかかる。一方、自動車のドライバーが事故を回避しようとし、パニック状態でブレーキを踏む場合、ベルトを締めていない占有者の位置は即座に変化し、彼又は彼女はエアバッグの方向に移動する。よって、占有者の位置を決定する問題は時間に臨界的である。典型的には、そのような状況での占有者の位置は、20ミリ秒未満で決定しなければならない。システムが、前向きの人間がシートに居ることを決定すると同時に、その前向きの人間が何処にいるかを決定しなければならないという理由はない。システムは前向きの人間が存在することを知っているので、全ての材料は占有者の位置の決定に使用できる。よって、この状況において、二重レベル又はモジュラーニューラルネットワークが遊離に使用できる。第1のレベルが車両シートの占有者を決定し、第2のレベルが占有者の位置を決定する。幾つかの希なケースでは、平行して用いられる複数のニューラルネットワークが幾分の利点を提供することが示された。これは、以下でより詳細に議論する。
【0043】
パターン認識システムに供給されるデータは典型的に、通常はトランスデューサに捕捉されデジタル化されたデータの未加工のベクトルではない。典型的には、データのかなりの前処理を実施して、ニューラルネットワークに供給されるデータから重要な情報を抽出する。これは、光学系において真実であり、得られたデータは、全てがニューラルネットワークに使用される場合は、極めて高価なプロセッサを必要とする。データ前処理技術はここに詳細には述べない。しかし、前処理技術は多くの方法でニューラルネットワークに影響する。例えば、車両シートを占有しているものを決定するのに使用される前処理は、典型的には占有者の位置を決定するのに使用される前処理とは異なる。幾つかの特定の前処理概念は、以下で詳細に議論される。
【0044】
パターン認識システムが前処理されたデータに適用されると、出力として1又は複数の判定が利用可能である。パターン認識システムからの出力は、通常は種々のトランスデューサの出力のスナップショットに基づく。よって、それは1つのエポック又は時間を代表する。そのような判定の精度は、パターン認識システムからの以前の判定も考慮した場合に通常は有意に改善される。占有者の特定に通常使用される最も単純な形態では、多くの判定の結果が平均化され、得られた平均判定が正しい判定として選択される。しかし、動的な位置のずれについては状況が全く異なる。占有者の位置は、特定のエポックにあることが知られ、彼の以前の位置は平均化できない。一方、現在の判定の精度を向上させるために使用される以前の位置の情報がある。例えば、新たな判定が占有者が6インチ移動したと言うが、以前の判定及び物理学からそれが起こりえないことが知られる場合は、以前の位置を外挿することにより現在の位置のよりよい見積もりがなされる。あるいは、例えば以前の10エポックからのデータについて、時間に対する占有者位置の曲線が最小自乗法などの種々の技術を用いてフィッティングできる。この同じタイプの分析は、最終判定ではなくベクトル自身にも適用でき。それによりデータをパターン認識システムに入れる前に訂正できる。
【0045】
ニューラルネットワークなどのパターン認識システムは、全体として不合理な判定をなすことがある。これは典型的には、パターン認識システムがそのトレーニングセットにある任意のベクトルに類似していないデータセット又はベクトルで表された場合に起こる。車両の種々の着席状態は制限されない。代表的なケースの無制限のセット全体から選択刷る努力がなされる。それにも関わらず、ニューラルネットワークに以前示されたものいがと有意に異なるケースが殆どである。従って、システムを車両に適合させる最終段階は、人間の知能を手段を追加することである。これは、ファジー理論と名付けられることがあり、結果的なシステムはニューラルファジーシステムと命名される場合がある。幾つかの場合では、これは観察者実験誤差の形態をとって規則を提示し、例えば、センサーAが他のセンサーと組み合わされて当該範囲の値を生じ、システムがパターン認識判定に優先し、それを人間の判定に置き換えるようにプログラムされる。
【0046】
この例は、R. Scorcioni, K. Ng, M. M. Trivedi, N. Lassiter: ”MoNif: A Modular Neuro−Fuzzy Controller for Race Car Navigation”: In Proceedings of the 1997 IEEE Symposium on Computional Intelligence and Robotics Applications, Monterey, CA, USA July 1997に見られ、自立的操作のために設計され、一方のケースではニューラルネットワークで、他方のケースではニューロファジーシステムでトレインされた自動車の場合が記載されている。慣れた道で操作された両車両に限れば、両車両とも満足のできる性能であった。しかし、不慣れな道では、ニューラルネットワーク車両は誤ったがファジー車両は成功裏に操作を続けた。当然ながら、ニューラルネットワーク車両が不慣れな道でトレーニングされれば、極めて良好に成功するであろう。それにも関わらず、ニューラルネットワークには重大な欠陥があり、それは殆どの場合、人間が道の状態に直面したときに乳等留ネットワークが何をするかという不確実性に関連する。
【0047】
従って、システムに人間の知能を付加する一態様は、システムが誤動作しやすいような状態を探し出すことである。残念ながら、現在の技術常識では、これは多大な試行錯誤を要する。一例は、ベクトルの或る一部がトレーニング中に経験した範囲を外れる場合、システムは特定の状態にデフォールトされる。1又は複数のエアバッグ又は他の占有者保護装置の展開を抑制する場合、この場合はパターン認識システムが不可能であることを示しても、エアバッグを展開するのが可能である。
以上の医術は以下の図面に記載するシステムに適用可能であり、上記の説明と以下のシステムの関係を下記に説明する。しかし、図面に示したシステムは、上記の方法又は装置の適用性を制限するものではないと理解される。
【0048】
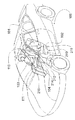
同じ参照番号が同一の又は類似の部材を示す添付図を参照すると、図1は、本発明に従って開発された着座状態検出システムを有する調節装置が適用されうる助手席シート1を示している。シート1は水平方向に位置する底部シート部2と垂直方向を向いた背面部3を有する。シート部2には、シートを占有する対象体があればその重さを測定する重量測定手段、すなわち一又は複数の重量センサー6及び7が設けられている。着座部2と背面部3(シートバックとも呼ばれる)の間の連結部にはリクライニング角度検出センサー9が設けられ、該センサーは着座部2に対する背面部3の傾斜角度を検出する。シート部2にはシートトラック位置検出センサー10が設けられている。シートトラック位置検出センサー10は、二点鎖線で示された背面基準位置から移動したシート1の移動量を検出する役割を果たす。シートバック3には、心拍センサー31と運動センサー33が埋め込まれている。車両の天井には容量センサー32が付設されている。シート1は自動車の運転席シート、前部助手席シート又は任意の他のシート並びに輸送車両の他のシートあるいは非輸送分野のシートであってもよい。
運動センサー33は車両の助手席における相対移動を検出するディスクリートセンサーとできる。そのようなセンサーは超音波に基づくものであることが多く、短時間の間に生じる超音波パターンの変化を測定できる。あるいは、過去の位置ベクトルからある位置ベクトルを減じて差分位置ベクトルを得ることにより、運動を検出することができる。本明細書においては、運動センサーは、ベクトル差に基づく特別なベクトルの創造に対する運動を検出するように設計された任意の特定の装置を意味するものとして使用される。
【0049】
センサー6及び7のような重量測定手段はシートに取り付けられており、例えばシートに作用する重量を測定するために、シート部2の中又は下あるいはシート構造体に装備することができる。重量は、シートに着座する者が不在のときはゼロとできる。センサー6及び7は、例えばシート部2のエアーバッグ又は袋体5によって、重複する目的で又はシートの異なった部分にかかる重量を測定する複数の異なったセンサーを表しうる。袋体5は一又は複数の区画を有しうる。このようなセンサーはシート部2又はシートバック3上の力又は圧力を測定する歪み、力又は圧力センサー、7又は他の適当な位置のようなシート構造部材上に設けられた歪みゲージを使用するようなシート1の全体又はシート表面の移動を測定する移動測定センサー、あるいは圧力センサーが重量の測定器として使用されうる圧力に移動を変換するシステムの形態を取ることができる。
超音波又は光学センサーシステム12が車両の前方ピラー(フロントピラー)の上部に取り付けられ、同様なセンサーシステム11が中間ピラー(センターピラー)の上部に取り付けられている。トランスデューサ11及び12の出力は、超音波センサー駆動回路18からのタイミング信号と同期して切り替えられるマルチプレックス回路19を通して帯域通過フィルタ20に入力され、ついで増幅器21によって増幅される。帯域通過フィルタ20は出力信号から低周波数波成分を除去し、またノイズの幾らかを除去する。エンベロープ波信号がアナログ/デジタル変換器(ADC)22に入力され測定データとしてデジタル変換される。測定データは処理装置23に入力され、該処理装置はタイミング信号により制御され、タイミング信号はついでセンサー駆動回路18から出力される。
【0050】
測定データの各々は正規化回路24に入力され、正規化される。正規化された測定データは波データとしてニューラルネットワークに入力される。
重量センサー6及び7の出力は重量センサー6及び7に連結された増幅器26により増幅され、増幅された出力はアナログ/デジタル変換器に入力され、ついで処理手段のニューラルネットワーク25に向けられる。
リクライニング角度検出センサー9とシートトラック位置検出センサー10は適当な電子回路に接続されている。例えば、定電流が定電流回路からリクライニング角度検出センサー9に供給することができ、リクライニング角度検出センサー9が背面部3の傾斜に対する抵抗値の変化を特定の電圧に変換する。この出力電圧は角度データとして、すなわち背面部3とシート部2の間の角度を表すデータとしてアナログ/デジタル変換器28に入力される。同様に、定電流が定電流回路からシートトラック位置検出センサー10に供給することができ、シートトラック位置検出センサー10がシート部2のトラック位置に基づく抵抗値の変化を特定の電圧に変換する。この出力電圧はシートトラックデータとしてアナログ/デジタル変換器29に入力される。よって、リクライニング角度検出センサー9とシートトラック位置検出センサー10の出力はアナログ/デジタル変換器(ADC)28及び29にぞれぞれ入力される。ADC28、29からの各デジタルデータ値はニューラルネットワーク25に入力される。このシステムと同様なシステムの更に詳細な説明は本出願人名義の上述の特許及び特許出願に見出すことができ、これら文献の全てを出典明示によりここに取り込む。上述したシステムは車両のシートの占有状態を検出するために本発明の教唆を使用して設計することができる多くのシステムの一例である。
【0051】
ニューラルネットワーク25は、増幅器25と正規化回路24に関連するADC28及び29に直接接続されている。このように、システムのセンサーの各々からの情報(データの流れ)はニューラルネットワーク25まで直接通過させられて処理される。センサーからのデータの流れはニューラルネットワーク25の前で組み合わされないで、ニューラルネットワークは別個のデータの流れ(例えば各入力ノードのデータの少なくとも一部分)を受け取り、それを処理してシートの現在の占有状態を示す出力を提供するように設計されている。よって、ニューラルネットワーク25は上述し以下に検討する形で学習することにより導かれたアルゴリズムを含むか取り込む。シートの現在の占有状態がひとたび決定されると、シートの現在の占有状態を考慮して例えばエアーバッグシステムのような車両部品又はシステムを制御することが可能である。
【0052】
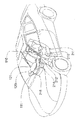
自動車の助手席の断面が図2において全体に100が付されて示されている。図示しないハンドルの後ろのシート102に車両の運転手101が座っており、成人の乗客103が助手席のシート104に座っている。ここでトランスデューサとも呼ばれる二つの送信器及び受信器装置110及び111が助手席100に位置させられており、一方のトランスデューサ110が車内灯に隣接又は近接する天井に配設され、他方のトランスデューサ111が車両のダッシュボード又はインストルメンタルパネルの上部中央に配設されている。これらのトランスデューサの配置に至る方法論は以下に詳細に説明するように本発明の中心をなす。この状況下で、本発明に従って開発されたシステムは、占有者がシート104に座っていることを確実に検出し、車両が衝突する事態になったときにはエアーバッグの展開を可能にする。トランスデューサ110、111は自動車の助手席の占有者の頭、肩及び後方に向いたチャイルドシート容積の分割軸に平行にその分割軸を向けて配置され、この特定の位置決めによって異なった形状を区別できる。超音波トランスデューサ110、111に加えて、重量測定センサー210、211、212、214及び215もまた存在する。これらの重量センサーは、同時係属米国特許出願第08/920822号により詳細に記載されている、ここに例証したような、車両シート支持構造体に付設された歪み測定トランスデューサを含む様々な技術のものである。当然に、シートクッションの変形又はその圧力を測定するシステムを含む他の重量システムを使用することもできる。ここに記載した重量センサーは一般的な部類の重量センサーの例示を意味するものであって占有者の重量を測定する方法の完全なリストではない。
【0053】
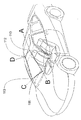
図3では、図2に示した成人の乗員に子供121を含む前方に向いたチャイルドシート120が置き換わっている。この場合、事故のときにエアーバッグが作動不能にならないようにすることが通常必要とされる。しかし、図4に示されるように、後方を向く位置に同じチャイルドシートが配置されている場合には、エアーバッグは、事故時のエアーバッグの展開が子供をひどく傷つけたり死亡させたりさえするので、通常は作動不能になっていることが必要である。更に、図5に示されているように、乳児キャリアー130の乳児131が助手席の後方に向く位置に位置させられている場合は、上述した理由からエアーバッグは作動不能にされなければならない。エアーバッグの展開を作動不能にする代わりに、例えばエアーバッグの展開の力を低減するために、展開を制御して子供に対する保護をすることもできる。助手席の乗員に対して助手席エアーバッグを作用不能にするか作用可能にするかは特定の応用に対して調整されるべきことに留意されなければならない。例えば、前方を向くチャイルドシートを有する実施例では、実際にはエアーバッグを作用不能にすることが望ましく、他の場合には電力を切った(depowered)エアーバッグを展開することが望ましい。助手席の対象及びその位置の関数としていつエアーバッグを作動不能にし、電力を切り、又は作動可能にするかの選択は、センサーシステムのプログラム又は学習段階においてなされ、大抵の場合、上述の基準が適用できる、すなわち、前方を向いているチャイルドシートと正しい着座位置の成人に対してエアーバッグの展開を可能にし、後ろを向くチャイルドシート及び乳児のために及び位置がずれているかエアーバッグモジュールに接近しているあらゆる占有者のためにエアーバッグの展開をできないようにする。しかし、本発明に従って開発されたセンサーシステムは他の基準に従ってプログラムされてもよい。
【0054】
他の技術を使用する幾つかのシステムが、上で示した4種のケースを区別するために考案されているが、何れも満足できる精度又は信頼性を持つ区別化は可能としなかった。これらのシステムの幾つかは、チャイルドシートがシート上に適切に位置せしめられベルト付けされる限り、作動するように思われる。シート内に配されたセンサーにより電磁気学的に検出されるチャイルドシートに装置が配置される例えばいわゆる「タグシステム」は、それ自体では信頼性があるものではなかったが、全体のシステムに情報を追加することができる。単独で使用される場合、それらは、チャイルドシートがシートベルトによって拘束されている限りは良好に機能するが、そうではない場合には、それらは高い失敗率を示す。米国の人口の中でシートベルトの着用は現在のところ約60%にすぎないので、チャイルドシートがシートに適切にベルト止めされない場合が多く、よって子供が事故時に怪我をしたり死亡する可能性は非常に高い。
この発明の方法はこの問題を解消するために考案された。この方法を理解するためには、図6において軸線ABによって連結されている二つの超音波送信器110と受信器111(トランスデューサ)を考える。各送信器は、送信器にその原点を持つ、画角と呼ばれるテーパ角度に主に限定される信号を発する。簡単のために、ある場合には別個の装置が各々の機能のために使用されるが、送信器と受信器が同じ装置であると仮定する。トランスデューサが突発波を送信して、超音波発信を助手席に行い、ついで助手席のある対象体から反射又は変形波を受信すると、トランスデューサからの対象体の距離を波の発信と反射又は変更波の受信の間の時間遅れによって測定することができる。
【0055】
単一のトランスデューサを見ていると、信号を反射し又は変更している対象体の方向を決定することはできないが、その対象体がトランスデューサからどれくらい離れているかのみを知ることができ、つまり、単一のトランスデューサは距離測定を可能にするが方向の測定を可能にしない。換言すれば、対象体はトランスデューサにその原点を持ち距離に等しい半径を持つ三次元の球状セグメントの表面上の点にありうる。図6の110と111のような二つのトランスデューサを考えると、両方のトランスデューサが同じ対象体から反射を受けるが、これはトランスデューサの適切な配置によって容易になり、反射のタイミングは各トランスデューサまでの対象体からの距離に依存する。二つのトランスデューサが独立して作用することをこの解析の目的に対して仮定すると、つまり、それ自体が伝送される音波の反射のみを聞き取るとすると、各トランスデューサは反射対象体までの距離を感知するがその方向はしない。トランスデューサが画テーパ角内の全ての方向に超音波を発すると仮定すると、各トランスデューサは、対象体がトランスデューサから各既知の距離の球面A、B上に位置していることを感知する、つまり各トランスデューサは、対象体が他のトランスデューサと同じ対象体の間が同じ距離かそうでなないトランスデューサからの特定の距離であることを感知する。二つのトランスデューサがあるので、反射対象体の距離はトランスデューサの各々に対して知られており、対象体の実際の位置は二つの球面A及びBの交差部である円上にある。この円は図6でCと標識する。円Cに沿った各点において、トランスデューサ110までの距離は同じで、トランスデューサ111までの距離は同じである。これは、もちろん、理想的な一次元の対象体に対してのみ厳密には正しい。
【0056】
多くの場合、その位置が知られている特定の円上に対象体がまさにあるときに円の位置を見いだすことができるので、対象体が特定の円上に存在するという単なる知識だけで十分である。つまり、対象の領域を通過する円等が対象体が生じない容積を通過する。よって、この特定の位置における円の単なる算定は、対象体がその円に沿って存在することを示すが、エアーバッグシステムのような車両の他のシステムを制御し又はそれに影響を及ぼすために使用されうる助手席の対象体に関する価値ある情報を提供する。これは、もちろん、二つのトランスデューサへの反射が実際は同じ対象体からのものであるという仮定に基づいている。他の対象体がシステムを混乱させうる反射を引き起こさないようにトランスデューサを配置するように注意が払われなければならない。
図7は例えばシートがチャイルドシートCではなく人によって、又は前方を向くチャイルドシートによって占有されているときに通常占有される容積及び後ろを向くチャイルドシートにより通常占有される容積をそれぞれ表す対象の二つの円D及びEを示している。よって、システムによって、(つまり、各トランスデューサからの距離の測定値を受け取り、トランスデューサから対象体までの距離を表す球面の交差部から円をつくり出す適切な処理手段によって)生成される円が成人助手によってのみ占有される位置にある場合、エアーバッグは、事故時のその展開が望まれるので、作動不能とはされない。他方、円が後ろを向くチャイルドシートにのみ占有される位置にある場合、エアーバッグは作動不能とされる。
【0057】
上記の議論は、対象体によって占有される容積又は一以上の対象体の表面からの反射が関与するという事実を考慮していない点でもちろん単純化されている。実際には、トランスデューサBは占有者の頭の後ろを取り上げ、トランスデューサAは前部を取り上げる可能性が高い。これは、技術者が解析するデータを調べる状況を一層難しくしている。パターン認識技術がこれらの状況から情報を抽出することができ、これらの技術の正しい適用を通によって、特定の車両に対してシステムの一部としてインストールされると、システムが例えば前方を向くチャイルドシートと後ろを向くチャイルドシート、又は適切な位置にいるか又は外れている前方を向く人を精確かつ確実に識別するアルゴリズムを開発することができることが見いだされている。
上記の議論から、(i)前方を向くチャイルドシートとエアーバッグの展開が望まれる前方に正しく位置した占有者と(ii)後方を向くチャイルドシートとエアーバッグの展開が望まれない場所がずれた占有者を区別する一義的な情報を提供するトランスデューサの位置決め方法が開示される。実際には、この理論を実行するために使用されるアルゴリズムは球面又は球の相互作用の円を直接計算しない。代わりに、パターン認識システムを用いてエアーバッグが展開されるべきではないものからエアーバッグの展開が望まれる場合を区別する。しかし、パターン認識システムがその機能を精確に遂行するには、システムに提供されるパターンが要求される情報を有していなければならない。つまり、様々なトランスデューサに対する助手席の占有対象からの反射音波のパターンが、エアーバッグの展開が望まれる場合と展開が望まれない場合とで一義的に異なっていなければならない。上述され以下に更に詳細に説明される理論は、反射音波のパターンがエアーバッグの展開が望まれる場合と展開が望まれない場合とで容易に区別できるように車両助手席にトランスデューサを如何にして位置決めするかを教示する。これまで示した場合では、ある実施化では、二つだけのトランスデューサが、車両構造が、円D(エアーバッグ作動可能)及びE(エアーバッグ作動不能)が条件の確実な特定が生じる臨界領域にある場合を除いてトランスデューサのフィールドコーンの外に位置するように二つのトランスデューサを配置することができる場合、所望のパターン識別を生じることが示された。よって、トランスデューサの目標及び画角が特定の車両にシステムを適合化させるのに重要な因子である。
【0058】
システムにおいて二つのトランスデューサのみを使用することは、トランスデューサの一方又は両方が例えば新聞などで遮られることによって作動不能になりうるので、典型的には許容できない。よって、第3のトランスデューサ112を付加することが望ましく、第8図に示すように、第3のトランスデューサに対して第3の球面集合を提供する。トランスデューサ112はフロントピラーの助手席側(システムが車両の助手席側で操作するように設計されている場合は好ましい位置である)に位置せしめられる。しかして3つの球面が二つの点のみで交差し、実際、目標角及び画角が適切に選択される場合には通常一つの点で交差する。もう一度言うが、この議論は点の対象体に対してのみ厳密には正しい。実際の対象体に対しては、反射が対象体の異なった表面から生じ、これが通常は対象体から同様の距離にある。よって、第3のトランスデューサの追加はシステムの信頼性を大幅に改善する。最後に、図9に示されるように、第4のトランスデューサ113の追加により、更に大きな精度と信頼性が達成される。トランスデューサ113は助手席側のドアに近い車両の天井に位置させられる。図9では、トランスデューサC及びDとトランスデューサA及びBを結ぶ線が実質的に平行であり、非対称、よって対象体の回転の精確な検出を可能にする。よって、例えば、乳児シートが図5に示されるような角度で配置される場合、この条件は、エアーバッグの展開を作動不能にするように決定するときに決定され、考慮されうる。
【0059】
上記の議論は、トランスデューサを位置決めし、二つの標的容積、つまりエアーバッグに隣接するものと車両シートの上部に隣接するものが占有されているかどうかを決定するシステムを設計することに中心を置いた。上記の特許にはエアーバッグモジュール上に又はそれに隣接して取り付けたセンサーと車両の高い位置に取り付けたセンサーを用いて車両シートの近傍の空間を監視する他のシステムも記載されている。このようなシステムは、独立した装置としてセンサーを用いており、対象体が位置させられている場所を決定するために二つのセンサーの組み合わせを使用してはいない。実際、そのようなセンサーの位置は、例えば新聞で何れか又は両方を隠すことが容易なように通常は下手に選択される。更に、システムの深刻な劣化を引き起こさないで一又は複数が遮られるように二つ以上のトランスデューサを使用するシステムは、本発明の譲受人名義の特許及び特許出願を除いて、開示されていない。再び言うが、ここの例は怪我を防止するのが必要なときにエアーバッグの展開を押さえる目的のものである。開示されたセンサーシステムは本発明と同じ譲受人の名義の上記特許出願に開示されているような多くの他の目的に対して使用することができる。これらの他の用途へのセンサーの使用性は他の参照される特許に開示されたシステムには一般に欠落している。
【0060】
二つのトランスデューサが使用される図2ないし7の条件をもう一度検討すると、図7の曲線Eと曲線Fの領域に位置している対象体の反射時間を示すプロットを描くことができる。このプロットは図10に示されており、cが、様々な異なった位置にシートが配置された様々な試験から後ろを向くチャイルドシートからの反射を表し、同様にsとhが前方を向く人の様々な占有者のそれぞれの肩と頭部を表す。実際の実験からのこれらの結果では、身体の厚みの影響が存在し、また結果はキーとなる容積の分離の基本原理が有効であることをなお示している。異なった対象体のクラスを収容する通路間の分離領域が存在することに留意されたい。上で参照した特許出願において記載されているニューラルネットワークに関連して使用されるのはこの事実であり、これが、前方を向く人から後ろを向くチャイルドシートを精確に識別するシステムの設計を可能にする。様々な対象体からの反射の間に顕著なオーバーラップがあり、よって反射された音波のパターンに基づいて分離がなされる。ここに記載された技術を用いて、後ろを向くチャイルドシートデータの全てが既知の通路内に入る、臨界的な表面のこの分離領域を生じるようにトランスデューサを注意深く配置することにより、ニューラルネットワークのために残るタスクが大幅に単純化され、特定の精度が大幅に改善される結果となる。
【0061】
三種の一般的な部類のチャイルドシートと独特な幾つかのモデルが存在する。最初に、約20ポンドまでの体重の占有者に対してである図5に示したような乳児のみのシートがある。これは、後ろを向く位置にのみ配置されるように設計されている。図2及び3に示されている第2のものは約20から約30ポンドの子供用であり、前方と後方を向く両方の位置において使用することができ、第3のものは前方を向く位置のみの使用のためのもので、約40ポンドを越える体重の子供のためのものである。全てのこれらのシート並びに独特なモデルはシステムを車両に適合させるための本発明による試験設備において使用される。各チャイルドシートに対して、車両内のそのシートの実質的にあらゆる可能な位置を表す数百の独特な向きが存在する。試験は、例えば22度傾斜され、17度回転され、十分にシートを上に戻し、十分にシートを後ろにし、ウィンドウを開放し、シートのフロントに配され、並びにこれらのパラメータの全ての変動に対して実行される。本発明の教唆を実施する場合、様々なアクセサリー、例えば衣服、玩具、瓶、毛布等々をチャイルドシートに加えて、多数の場合がまた実行される。
同様に、例えばサイズ、衣服、地図又は新聞を読むような活動、ラジオを調節するために前傾するなどを含む広範な変動要因が占有者に使用される。また、占有者が足をダッシュボードに置いたり、様々な一般的ではない位置をとるような場合が含まれる。上記の姿勢の全てが述べられていない多くの他のものと共に考慮されると、パターン認識システムを学習するのに使用される姿勢の全数は500000を越えうる。目標は、実際の使用時に生じる全ての占有状態を表すことを姿勢学習セットに含めることである。システムは学習セットのものに類似した場合に対して精確な決定をするのに非常に精度がよいので、ケースが全て別で他のケースのコピーではないと仮定すると、トータルシステムの精度は、学習セットのサイズが増加すると増加する。
【0062】
占有状態における全ての変動に加えて、データ収集の間、環境の影響を考慮することは重要である。音波は空気中の密度変化により有意に回折されうるので、温度勾配又は温度の不安定性が特に重要である。学習における温度勾配又は不安定性の使用の二つの側面がある。先ず、熱不安定性が存在し、よって温度に不安定なデータが存在するという事実はデータベースの一部であるべきである。この場合に対しては、温度不安定で収集されたかなり少量のデータが使用される。温度不安定性の使用の更に重要な点は、データにそれが変動性を付加するという事実から生じる。よって、かなり多くのデータが温度を不安定にして得られ、実際、ある場合には、殆ど全部のデータベースが、ニューラルネットワークがデータを記憶しないが代わりにデータから一般化するようにデータに変動性をもたらすために、時間的に変化する温度勾配で取られる。これは、ヒーター操作を伴う寒い車両及びエアコン操作を伴う暑い車両においてデータを取ることによって達成される。また更なるデータは日光の負荷によって引き起こされる安定な温度勾配を模倣するように閉めた車両においてヒートランプを用いて取られる。
【0063】
500000の車両姿勢に対してデータを集めることは膨大なタスクではない。訓練を受けた技術のある乗員は典型的には一時間に2000の姿勢又はベクターを越えるデータを収集することができる。データは典型的には50から100ミリ秒毎に収集される。この間、占有者は、所望の数の着座状態の例が得られるまで、連続して移動し、側方から側方に、前後に移動し、頭を捻り、新聞と本を読み、手、腕、足及び脚部を動かすことを含み、車両で連続的に変わる位置と姿勢を取る。ある場合には、この方法は特定の領域に占有者の運動を制限することにより実施される。ある場合には、例えば、占有者は、安全ゾーン、外れゾーン、又は中間のグレーゾーンでありうる特定の領域にいながら、これらの異なった着座状態をとるように学習がなされる。このようにして、エアーバッグ作動不能、脱電力エアーバッグ作動可能又はフルパワーエアーバッグ作動可能状態を表すデータを収集する。換言すれば、占有者の頭の後ろ及び/又は肩の実際の位置がストリングポット、高周波超音波トランスデューサを使用して又は光学的に追跡される。このようにして、占有者の位置を測定することができ、これがエアーバッグを作動させない場合か作動させる場合かについての決定を後でなすことができる。占有者を連続的に監視することにより、ある着座状態と他の状態の占有者の比較を可能にするデータを収集することができるという更なる利点が得られる。これは、例えば、衝突前のパニック時のブレーキ作動状態の間、 占有者が外れゾーンにいつ入るかを予想するために望ましいので、一連の過去の位置に基づいて占有者の未来の位置を見積もる試みにおいて特に価値がある。
【0064】
製造される全ての車両で学習を行うことは必要ではなくむしろ各プラットフォームカーで学習を行うことが必要であることに留意することが重要である。プラットフォームは同じ車両構造に基づいて製造される一群の車両モデルの自動車メーカーの命名である。
ニューラルネットワークに関する文献を概観すると、そのような大きな学習セットを使用することはニューラルネットワーク分野ではユニークであるという結論に至る。ニューラルネットワークの規則は各ネットワーク重量に対して少なくとも3通りの学習ケースがなければならないことである。よって、例えば、ニューラルネットワークが156の入力ノード、10の第一の隠れレイヤーノード、5の第二の隠れレイヤーノード及び一つの出力ノードを有する場合、これは全体で1622の重量になる。一般的な理論では、5000の学習例で十分である。従って、100倍の多くのケースによってより高い精度が達成されるであろうことは全く予想できない。よって、学習データベースのサイズが何万のケースまでにさえ増加するにつれてシステムの精度が大幅に改善することは自明ではなく、ニューラルネットワークの文献から推論することはできない。また、試験の数又はデータベースのサイズを増加させるとシステムの精度にそのような顕著な効果が生じることは、超音波トランスデューサを使用して得られたベクトルのプロットを見ても自明ではない。ベクトルの各々は数カ所の有意なピークと谷部を持つかなりのコースプロットである。システムの空間分解能は典型的には約3から4インチであるので、そのような大きなデータベースが有意な精度の改善を達成するために必要であることは全く驚くべきことである。
【0065】
自動車へ超音波システムを適用する過程をここで記載する。ステップのより詳細なリストは付録2に紹介した。ここでは超音波システムの中心的な部分を記載する。また負荷および光または他の電磁波システムを使用するときも同様のステップを適用する。以下の記載は実施例でありこれに限定されるものではない。
1.自動車に適合するようにトランスデューサ、ホーンおよびグリルを選択する。この段階で、通常は波が助手席へ伝搬するようにフルホーンが用いられる。トランスデューサの美的なマッチングを適合させるために、自動車表面へは使用されない。このとき、必要な伝搬領域は、直接自動車内で測定するか、CADによる図面から推定する。
2.音波トランスデューサ領域のポーラプロットを作成する。トランスデューサ、ホーンの候補、およびグリルは組み立てられ、領域角が設計通りであることを確認するためにテストする。ホーン内のトランスデューサやグリルの適合は頻繁に要求される。超音波システムへ適切に設計されたグリルは、光システムのレンズと同様に働く。
3.波の伝搬領域が、自動車の助手席の必要な体積を占めることを、およびマルチパス効果によって近隣平面上での衝突がないことえを検査する。もし必要ならば、ホーンとグリルを再設計する。
4.自動車へトランスデューサを搭載する。
5.自動車内のトランスデューサ領域をマップし、マルチパス効果と伝搬範囲を検査する。
6.トランスデューサの照準を合わせ、もし必要ならば領域の再マップを行う。
7.デイリーキャリブレーション固定器を搭載する。
8.50000から100,000ベクトルを取得する。
9.もしクロストークが存在するならばいくつかの初期データを削除し、必要とされる助手席の空間内のデータを保持するいくつかの最終点によって考慮している空間に対するベクトルを調節する。
10.ベクトルの正規化。
11.自動車に搭載するアルゴリズムを作成するために。ソフトウエアによって実現されたニューラルネットワークを実行する。
12.アルゴリズムの正確さを検査。もし十分正確でなければさらにデータを集め必要ならば繰り返す。もし、なおも正確でなければ穴を埋めるためにトランスデューサを付加する。
【0066】
13.十分正確になったとき、500,000の学習ベクトル収集する手続きをする。
占有率(付録1、2および図12−19参照):
占有サイズ、位置(区域)、衣服、その他
チャイルドシートのタイプ、サイズ、位置、その他
空席
車両構成:
シート位置
窓位置
バイザーおよびアームレスト位置
隣接しているシートはリアシート内の他の占有物
温度
温度勾配−安定
温度の不均一−ヒーターおよびエアーコンディショナー
乱気流−窓の開放、その他による高速走行
14.上述の他の組み合わせを用いて、100,000の独立なベクトルデータを収集する。
15.許容基準を提示するための50,000ベクトルの「実世界データ」の収集、より詳細には、実世界での実際のシートの状態の可能性を提示する。
16.学習ベクトルと独立データベクトルを用いてトレインネットワークと生成アルゴリズム。
17.実世界データを用いてアルゴリズムの検証。
18.自動車へアルゴリズムを搭載し、テストする。
19.システム内の最終的な欠陥(領域の誤り)を削除するためにポストプロセッシング方法論を決定する。
20.アルゴリズム内へポストポストプロセッシング法を実装する。
21.最終テスト。ステップ13までの工程の終了は、助手席の内装の表面に搭載されたフルホーンを持つトランスデューサの使用を含む。これは従来のステップ13か本ステップのどちらかを行う。これは、助手席の視覚的な表面を含めてトランスデューサホルダーの設計を含み、ゆえに、領域を制御するのに役立つ、適切に設計されたグリルをカバーでき、内装の美的品質を保つのに役立つ。これは、通常冗長な工程であり、顧客との相談を含んでいる。通常、13から20までのステップは、最終的なトランスデューサおよびホルダーの設計が選択された後の時点で、繰り返される。フルホーンをとる該初期データは最も良いシステムと比較して与えられる。美的なホーンやグリルがフルホーンに置き換えられたとき、能力の低下を起こす。2つのデータ収集サイクルを導入することによって、厳密な測定の精度は低下する。
22.製品として使用される自動車を出荷する。
23.続けて改良するために実世界検証データを付加的に収集する。
【0067】
トランスデューサ及びコントロール回路並びにニューラルネットワークについての更なる詳細は、上記の特許及び特許出願に与えられ、それらの全体をここに再現するように取り込むものとする。
最後に、システムは車両の生産の輸送において起こる製造及び取り付け許容誤差を代表する状態でトレーニングされ試験される。よって、例えば、システムは任意の方向に1インチまでの移動及び15度までの回転した位置に取り付けられたトランスデューサで試験される、泥及び他の変数で刺激される。車両に対するこの許容誤差は、相違するが炊事したモデル車両へのシステムの取り付けにも許容される。
【0068】
音速は、温度、湿度及び圧力で変化する。これは、トランスデューサ間の位置が知られていることによって補償でき、従って音速が測定できる。よって、車両セットアップ時、しばしばその後に、音速は図5のトランスデューサ110等のトランスデューサによって測定でき、他のトランスデューサによって受信される信号を送信する。それらを離間する距離が知られているので、音速が計算され、システムは自動的に音速の変動による変化を除去するように調節される。従って、システムは、温度、湿度又は圧力に関係なく同様に操作される。
上記の音速測定での問題は、車両内の対象物が一方のトランスデューサから他方への経路を遮断することである。これは当然にチェックされ、一方のトランスデューサからの信号が他方に到達しない場合には、修正がなされない。しかし、この問題は、経路が完全に遮断されずに僅かに遮断されることである。このことは超音波経路の延長をもたらし、温度変化の誤差を生じる。これは、更に1つのトランスデューサを使用して解決できる、
【0069】
温度を決定のための代替的方法は、温度で変動するトランスデューサのパラメータの幾つかを測定するトランスデューサ回路の使用である。多々追えば、超音波トランスデューサの自然周波数は周知の様相で温度に従って変化し、従ってトランスデューサの自然周波数を測定することにより温度を決定できる。
各トランスデューサから他のトランスデューサまでの距離が注意深く測定できる方法及び音速を決定する溜めに開発されたアルゴリズムは、本発明の教示の重要な部分を占める。これ以前には、音速は一のトランスデューサから他の知られたトランスデューサへの単一の伝達に基づいて計算されていた。これは、不正確なシステム設計及び場におけるシステム精度の低下をもたらす。
【0070】
システムの一部である電気的コントロールモジュールは、一般的にトランスデューサと同様な環境に配置されるので、温度を決定する他の方法が利用可能である。この方法はデバイスを使用し、その温度感度は知られていて、電気回路と同じボックス内に配置される。実際に、多くの場合、プリント回路基板上に存在する部材が監視され、温度の表示を与える。例えば、対数補償回路のダイオードは、温度に従って抵抗値が周知の様相で変化する特徴を持つ。
本発明の技術に従って開発されたシステムの他の重要な特徴は、車両の運動が新規な方法でシステムの精度向上に使用できるという合理化である。超音波は、鏡における光のように殆どの対象物で反射される。これは光に比べて超音波の長い波長による。その結果、或る種の反射が受信機を圧倒して利用可能な情報を減少させる。占有者及び/又は車両が運動中に読みを取り込み、その読みを幾つかの伝達/受信サイクルについて平均化した場合、占有者及び車両の運動は、角度方向的には僅かだが、反射パターンを変更させて鏡面効果を低下させるには十分な面の変化を生ずる。幾つかのサイクルの平均である全体の効果は、単一のサイクルより明瞭な反射対象物の画像を与える。
【0071】
占有者が通常の車両操作中に車両内に着席している場合、占有状態の決定は、長時間に渡る連続的な観察によってかなり改善される。これは、ニューラルネットワークへの挿入に先立つデータの平均化を伴うか、又はニューラルネットワークの判定を平均化してもよい。これは、工程の分類化相として知られる。分類化の間に、占有状態が決定される。車両は、前向きの人間、空席、後ろ向きのチャイルドシート、又は位置のずれた人間に占有されているか。典型的には、多数秒のデータが蓄積され分類化が決定される。
一方、ドライバーが差し迫った衝突を関知したとき、彼又は彼女は、典型的にはブレーキを強く踏み、衝突の前に車両の速度を低下させようとする。占有者がベルトを締めていない場合、彼又は彼女は、このパニック状態のブレーキ操作中にエアバッグの方向へ移動する。占有者の一を決定する目的のために、分類化のようにデータを平均化する十分な時間はない。それにも関わらず、以前のベクトルからのデータに情報があり、それは、例えば温度効果によって生じうる現在のベクトルにおける誤差を部分的に修正できる。一つの方法は、以前のトレーニングに基づいてニューラルネットワークを用いて占有者の一を決定することである。当然のことながら、車両に加速時計が存在し、加速度データをこの計算に利用できるならば、より高い精度の予測が可能となる。よって、現在のベクトルの誤差データの修正に使用できる以前のベクトルのデータにおける情報並びにこのデータから決定された占有者の位置が存在し、従って、分類化の平均化法に類似しすぎてはいない手法により、占有者の位置精度をより高い精度で知ることができる。
【0072】
超音波占有者位置センサーシステムのための超音波トランスデューサの配置に戻ると、超音波トランスデューサの配置に関する本発明のより新規な特徴として、本出願は、(1)標的容量の一軸監視への2つのセンサーの適用、(2)対象物位置を感知するための標的容量をスパンする2つのセンサーの配置方法、即ち、トランスデューサが感知される対象物に渡って検知軸に沿って取り付けられる、(3)識別対象物の特徴を分離する軸に平行する光学的標的識別のためのせんさーの配向方法、(4)後ろ向きチャイルドシート及び前向き人間検出のための人間検出の場合の頭部及び肩部及び支持面の決定方法を開示する。
【0073】
一組の監視が、電磁気センサーの使用のために入手可能である。そのような規則は、このようなセンサーが、典型的には、センサーに関連する側面及び垂直面、及びセンサーに対して垂直距離を測定することにおいてより正確であることを考慮に入れなければならない。これは、特に、CMOS及びCCDを基礎とする振動子の場合である。かなりの研究が、超音波振動子の解像度を改良するために進められている。より高い解像度の振動子を利用するためには、より近くともにデーターポイントが得られるべきである。これは、返送されたシグナルからエンベロープが抽出された後、サンプリング速度は、1秒あたり約1000サンプルから恐らく1秒あたり2000サンプル又はさらに高くへと増加しなければならない、ということ意味している。分析されることを必要とするデータ量の二倍又は三倍することで、車へ取り付けるシステムは、かなりの計算力を必要とする。これは、より高価な電子システムとなる。すべてのデータに同じような重要性があるのではない。通常の座席位置の乗員の位置は、かなりの正確性で知られる必要はないが、乗員がクラッシュ(衝突)前のブレーキ作動中に立ち入り禁止境界域へ動く場合、空間の正確性の必要性はさらに重要になる。幸いにも、神経ネットワークアルコリズムを生じるシステムは、神経ネットワークによって使用される各データポイントの相対的価値を、システムデザイナーへ示唆する能力を有する。従って、例えば、ベクター当たり500データポイントほどがトレーニング段階及び注意深い剪定後に収集され、神経ネットワークへ供給され、車へ備え付けられたシステムによって使用されるデータポイントの最終数は、例えば、150へ減じることができる。入力データを切り詰めるために神経ネットワークアルコリズム生成プログラムを使用するこの技術は、本発明の重要な教示である。この方法によって、高解像振動子の利点を、電子車に備え付けられた回路のコストを増やすことなく最適に使用することが可能である。また、一度神経ネットワークがデータポイントの間隔を決めると、例えば、はっきりとした安全ゾーン中の位置と比較して立ち入り禁止ゾーンの端においてより多くのデーだポイントを得るによって、これは微調整されることができる。最初の技術は、すべての500データポイントを収集することで行われ、例えば、車へ取り付けられたシステムの一方で、データのデジタル化間隔化は、必要とされるデータのみが得られるようにハードウェア又はソフトウェアによって決定できる。
【0074】
パニック又は衝突前の状況でのブレーキ作動中の乗員の位置を定めるための、上記に記載の技術は、モジュラー神経ネットワークの使用を包含する。この場合には1つの神経ネットワークは、車の占有状態を測定するために使われ、2番目の神経ネットワークは、車内の乗員の位置を定めるために使用された。複式神経ネットワークを使用するシステムを設計する方法は、本発明の主要な教示である。このアイデイアが一般化された時、複式神経ネットワーク構造の多数の潜在的な組み合わせが可能となる。これらの幾つかが、現在検討されている。
【0075】
複式神経ネットワークを使用する最も早い試みの一つは、別に訓練された異なったネットワークを組み合わせたが、一つのネットワークの正確性へ影響を与えるエラーは、その他のネットワークの正確性へ影響を与えるエラーには依存しないという理論の下の実質的に同じデータによった。例えば、4つの超音波振動子を含むシステムのためには、4つの振動子データの異なったサブセットを使用して4つの神経ネットワークのそれれぞれを訓練することができる。従って、振動子が任意にA、B、C及びDとラベルされた場合には、最初の神経ネットワークはA、B及びCからのデータで訓練されるであろう。2番目の神経ネットワークは、B、C、及びDなどのデータで訓練されるであろう。この技術は、データ中のエラーを除くよりはむしろ覆い隠すことを試みるものであるために、大きな成功をおさめていない。にもかかわらず、このようなシステムは、すべての4つの振動子からのデータを使用した単一のネットワークと比較して、幾つかの状況においてかろうじてより良く行われる。このようなシステムを使用する不利益は、計算時間はおよそ3つだけ増加する。これは、車へ取り付けられたシステムのコストへ顕著な影響を与える。
【0076】
上記に記載の平行神経ネットワーク構造の利点の幾つかを得る代替方法は、隠された層の一つ以上の節点のすべてが入力節点のすべてと連結していないが、単一神経ネットワークを形成することである。あるいは、2番目の隠された層が選択された場合、先の隠された層の節点のすべては、後の層のすべての節点と連結していない。隠された層の節点の代替グループは、次に異なった出力節点へ与えられ、出力節点の結果は、単一決定への神経ネットワーク訓練プロセス又は投票過程のどちらかを通して組み合わされる。この後半のアプローチは、実質的に計算の複雑さを減じる一方で、平行神経ネットワークの利点の殆どを保持する。
【0077】
平行のネットワークの基本的問題は、それらが、神経ネットワーク構造そのもの又は使用されるデータの質を改良するよりも冗長性によって信頼性と正確性を達成することに焦点をあたたいることである。それらは、また、最終車の取り付けられたシステムのコストを増加する。あるいは、モジュラー神経ネットワークは、仕事を分割することでシステムの正確性を改良した。例えば、特定の意味において木のタイプ及び動物のタイプを定めるためにシステムが設計されるならば、モジュラーアプローチは、興味の物が動物なのか木なのかを最初に決定し、そして木のタイプ及び動物のタイプを決定するために分離神経ネットワークを使用する。ヒトが木を見た場合、彼は彼自身がトラ又はサルであると自答しているのではない。一度分類が決定されてからは、モジュラー神経ネットワークシステムは効果的であ留。席は前方を向くヒトによって占有されている。例えば、あの目的物の位置は、さらに正確に、そして増大した計算源を要求せずに決定できる。
【0078】
モジュラー神経ネットワークが証明された価値を有する、その他の例は「特別」のケースから「通常」を分離する手段を提供する。幾つかのケースにおいて、神経ネットワークによって容易に同定される「普通」と表されるケースへ殆どのデータがあてはまることが見出された。ケースのバランスは、神経ネットワークをかなり難しいものにしたが、それらが普通のケースと分離され、分離して扱われることを可能にする特別なケースの同定可能な特徴がある。曖昧なロジック、普通のケースの平均クラスのベクターを使用した統計的ふるい分け、ベクター標準的逸脱、及び曖昧なロジックネットワークがあるクラスに属するベクターの可能性を定めるために使用される場合の許容限界値を含むこの分離を行うために、神経ネットワークに加えて、種々のタイプのヒトの知性が使用できる。可能性が限界許容値より低い場合、標準的神経ネットワークが使用され、高い場合は特別な物が使用される。
【0079】
平均−分散関連、曖昧ロジック、確率論的及び遺伝的アルゴリズムネットワーク、及びその組み合わせ、例えば神経−曖昧システムが他の技術として検討されている。特定の車へ適用するシステムのデザインの過程では、上記に言及されたものを含めて、多くの異なる神経ネットワーク構造が考慮された。構造の特定の選択は、システム設計者によってトライ アンド エラー を基礎としてしばしば決定されてきた。上記に記載の平行構造システムが一般的に有益であると証明されていないが、この構造の一つのバージョンは、ある可能性を示している。訓練と非依存データーベースのために訓練プロセスが決定プロセスの正確性を越えることは知られている。また、一般化しようとするネットワークの能力は崩れる。すなわち、ネットワークは、あるケースでデータベースと平行のシステムと存在するが、いまだ幾つかの顕著な違いをともなっている。ネットワークは、訓練の初期段階で適切な決定を行うことができるが、ネットワーク後の間違った決定は完全に訓練されてしまう。これは時々、若いネットワーク対古いネットワークジレンマと呼ばれている。従って、幾つかのケースでは、古いネットワークを若いネットワークと平行に使用することは、両ネットワークのいくつかの利点を保持することができる。すなわち、古いネットワークの高い正確性が、若いネットワークのより大きな普遍性と共役した。再び、これら特定の技術の何れかを選択することは、特定の車へ適用するシステムを設計する過程の一つであり、この発明の主要な課題である。使用された道具の特定の組み合わせは、特定の応用及びシステム設計者の経験に依存する。
【0080】
上記の方法は、超音波振動子の使用との関連で記載されている。しかしながら、多くの方法は、また、光学、レーダー、容量性及び他のセンシングシステムへ応用可能であり、応用可能な場合、本発明は超音波振動子に限定されるものではない。時に、本発明の重要な特徴は、、一つの受信機が新聞紙のような物資でブロックされても、システムがまだ高い信頼性で作動するように、3又はそれ以上の分離されて配置された受信機の適切な置き換えである。また、この特徴は、超音波に代わって電磁気放射線を使用したシステムへ応用できる。しかしながら、特定の位置は、特定の振動子の特性に基づいて異なる。二次元カメラに基づいた光学センサー又は他のイメージセンサーは、例えば、超音波センサーのケースのように長方形の角に配置されるよりは、監視されるべき席を囲む長方形の側面により適切に配置される。これは、カメラが上下距離及びその目的物までの距離よりも領域視界を横断距離を測定するために最も適している、センサーからアキシアル距離を超音波センサーが測定するためである。電磁気放射線の使用とともに非常に低いレベルライトの感度の分野において最近得られた利点によって、ある装置においては、トランスミッターを除き、バックグラウンドライトを、レシーバーから目的物までの距離を得るための自動フォーカシングのような技術を使用することともに照明のソースとして使用することが、現在は可能である。よって、システムの複雑さをさらに減じるためには、単にレシーバーが必要である。
【0081】
上記において暗黙であったが、強調すべき本発明の特徴は、分布された振動子実装を有するシステムを開発すす方法である。背向け子供シート(RSFC)及び位置外問題を解決する試みを有する他のシステムは、単一の振動子実装位置又は最も多くても二つの振動子実装位置に依存する。このようなシステムは、容易に新聞紙又は乗員の手によって見えなくすることことができ、例えば、乗員と振動子の間で乱用される。この問題は、取り付けられた3又はそれ以上の振動子よって取り除かれ、これらは、乗客の区分容積の対象からは、明らかに異なった視界となる。システムが、例えば、FIG.9.の分布システムに例示されているような4つの振動子を使用することを適用すると、2つの振動子がそれらが作動できないように覆われても、システムは正確性において単に僅かの減少を被る。
【0082】
振動子がブロックされた場合には、システムのすべての利点を得ることは重要である。訓練と非依存データベースは、ブロックされた振動子の多くの例を含む。パターン認識システム、このケースにおける神経ネットワークが、かなりの数のブロックされた振動子のケースにおいて訓練されていなければ、そのようなケースを後に認識するのに良い働きを行わない。車で高い信頼性を示し、切迫した発明の重要な側面であるシステムを設計することの成功のためにはデータベースの組み立てが重要であり、このは、さらにもう一つの例である。
【0083】
特殊な適用に対するシステムを設計する過程の一部と成り得る又は成り得ない他の技術は以下を含む。
1.ファジー論理。 上述したように、ニューラル・ネットワーク(神経回路網)は、頻繁に、過去に遭遇したことと異なる状況を生じると、不合理な結論に帰着する特性を示す。頻繁に、正規のオブザーバーが入力データを見ると、データに対する境界が明らかとなり、それらの境界から外れる場合は、不正なデータと不測事態によるデータのどちらかを示している。時折、システム設計者がこれらの場合を処理する規定を加えることが望ましい。これらはファジー論理型規則又は人知を基礎とした規則となりうる。1例は、データベクタのある部分がシステムがエアバック作動状態になる予測範囲から外れるときである。
2.遺伝子的アルゴリズム 特殊車両のニューラル・ネットワーク(神経回路網)アルゴリズムを開発するとき、可能性のある最適なアルゴリズムを選択する保証はない。最適なアルゴリズムを選択する公算を改善する1つの方法は、複数の遺伝子的アルゴリズムの原理を取り入れることである。この原理の1つの適用において、ネットワーク構造及び/又はノード負荷は、さらに高い成功率を有する他の組合せを見つけ出そうと、擬似ランダムで変化する。このような遺伝子アルゴリズムシステムの解説は上述引用本(文献?)の計算知能に載っている。
3.予備的処理 軍用目的として、データ自体よりむしろそのデータのフーリエ変換を使用することが共通に容認されている。これは特に乗員及び車両の位置とは対照的に、分類に特に有効である。モジュラーネットワークを使用したとき、例えば、分類化ニューラル・ネットワーク(categorization neural network)に対してデータのフーリエ変換を使用し、位置決定ニューラル・ネットワークに対して非変換データを使用する。近年、ウエーブレット変換が予備的処理として注目されている。
【0084】
4. 乗車位置決定比較 上記、動的位置外の課題において、特殊ベクタでデータ品質を決定するフィルタとして乗車位置を決定できることが検討されている。所定の乗車位置に基礎を置いたデータベクタの品質を改善する方法として、一般的にこの方法を用いることができる。車内の有生物と無生物を識別するのを助けるためにこの技術を発展させることもできる。例えば、facing humanは車両の移動中に頻繁に位置を変え、それに対して、ボックスはほとんど動きを見せない傾向にある。これも、例えば、小柄な人間と空席を識別する上で有用である。その特殊ベクタが著しい相異を示さないとしても、小柄な人間を収容したシートの動きは空席の場合とは大きく異なる。つまり、2つの連続的なベクタとの相異から成るベクタは動き及び乗車の・・・を示している。
5.遮断トランスデューサ 除去トランスデューサの下位集合(部分集合)においてのみ学習した異なるニューラル・ネットワークを使用するためにこのような状況を理解するときに、時折、肯定的に遮断トランスデューサを識別することが望ましい。特に、3つのトランスデューサにおいて学習されたので、このようなネットワークは全般的に遮断トランスデューサの1つを具備した4つのトランスデューサにおいて学習されたネットワークよりもさらに正確に実施する。遮断トランスデューサが識別されると、その状態が適当な時間以上続くか否かを乗員に通知できる。
6.その他の基本的な構造 逆方向伝播ニューラル・ネットワークは極めて成功した多目的ネットワークである。しかし、複数のアプリケーションにおいては、さらに適切に実施できる他のニューラル・ネットワーク構造がある。例えば、上述したような並列ネットワークはシステムにおいて著しく改善することを理解する場合、特殊なニューラルネット・ワークがデータ内に存在する情報全てを制限することに成功していない。このような場合において、結果が改善すれば、RCE確率論理予測(RCE, Stochastic, Logicon Projection)又はニューラル・ネットワーク構造のその他約30タイプのうちの1つを理解する試みが可能となる。したがって、この並列ネットワーク試験は、現在のニューラル・ネットワークが利用可能なデータを効率的に利用できる規模を決定する有用な手段である。
【0085】
7.トランスデューサ幾何 特殊車両のシステムを設計する上で頻繁に使用される別の技術は、トランスデューサの方向と領域角度(field angle)を向けて最適な取付け位置を決定するニューラル・ネットワークを使用することである。特に扱いにくい車両に対して、かなり多くの超音波トランスデューサを設置し、例えば、最も小さいトランスデューサを除去するニューラル・ネットワークを使用することが望ましい。これは、まず、上記記載の全種のトランスデューサを組合せ、後に剪定する。
8.データ品質 多量のデータをとることは極めて容易であり、大きなデータベースがニューラル・ネットワークのかなり長い学習時間を要するので、ニューラル・ネットワークを使用してデータベースの可変試験を行うことができる。例えば、データベースの半分のデータを除去した後に、システム設計者はバリデーションデータベースに対して学習ニューラルネットワークの性能が低下しない場合、システム設計者は学習データベースは多量の冗長データを有する。他のデータと実質的に区別できないデータを除去する類似性分析のような技術を使用できる。修正を加えたデータベースが重要となるので、全般的にデータベースにおいて、同一のもの又は同一のベクタを有することが望ましい、したがって、ベクタの存在はバイアスシステムを可能にし、一般化から記銘化するようにシステムを運転する。
9.環境的要因 評価は、ニューラルネットワーク及び実験の設計などの技術を用いたシステム精度についてのデータ集積の間に環境的影響の変化を使用して有利な効果をなすことができる。
【0086】
10.データベース構築 一般に、トレーニングデータベースは、ニューラルネットワークが認識すべき全ての占有状態が、トレーニングデータベースでほぼ等価に示されるべきであるという平坦な意味を持つと考えられている。一方、典型的には、独立データベースは、トレーニングデータベースと同様に構成される。一方、確認データベースは、典型的には現実世界の実験からの代表的ケースに対して非平坦である。確認データベースは平坦である必要はないので、多くの極端なケースを包含し、殆どの共通するケースで高度にバイアスされる。
11.バイアス 全ての着席状態占有状態は等しく重要ではない。最終システムは前向きの定位置の人間については100%近い精度である。それは現実世界の状態の大多数を含むので、ここで精度が多少でも低下すると、占有者の保護が他に利用可能な状態ではエアバッグの展開が起こる。よって、精度の僅かな低下が死亡及び傷害を大きく増加させうる。しかしながら、これは平衡のとれないネットワークが一般性の低下を導くので危険でありうる。
12.スクリーニング データ獲得に関連するループは重要である。即ち、データはデータが獲得されたとき、それが良好なデータであるかを確認するチェックをすべきである。悪いデータは、電力ラインでの電気的妨害、溶接装置近くなどの超音波供給源、又は人間の誤操作等によって起こりうる。例えば、データがトレーニングデータベースに残る場合、ネットワークの性能を低下させる。悪いデータを削除する幾つかの方法がある。最も有望な方法は、30,000から50,000ベクトル等の初期値を取り、暫定的なネットワークを生成することである。
【0087】
13.ベクトル正規化方法 存在検出を通して、ベクトルはベクトルの全てのデータに基づいて正規化され、即ち、0から1の範囲の全てのデータを有する。特定のケースについては、正規化過程を選択的に適用し、各トランスデューサからのデータの初期部分ではデータを異なって削除又は処理するのが望ましいことがわかった。
14.誤差抽出 ニューラルネットワークシステムの成功は、ネットワークに追加データが入力されるか否かによることが多い。一例は、最初のピークが現れる前の0データ点の数である。あるいは、最初のピークまでの正確な距離は、データのサンプリングの前に決定しうる。他の特徴は、ピークの数、ピーク間の距離、最大ピークの幅、正規化係数、ベクトル平均及び偏差などを含む。これらの正規化技術は、システムの精度を僅かに向上させるために適合過程の最後に使用されることが多い。
15.ノイズ 文献には、データへのニューラルネットワークから与えられるノイズの付加が、ニューラルネットワークの精度を向上させることがしばしば報告されている。しかしながら、温度勾配の存在下でのネットワークのトレーニングは、データへの人工的なノイズの付加の必要性をかなり排除することを示した。それにも関わらず、幾つかの場合では、低レベルの無作為な任意のノイズがトレーニングされたデータに付加された場合に改善が観察された。
【0088】
16.セットアップの写真記録 全てのデータが集積されニューラルネットワークのトレーニングに使用された後、ニューラルネットワークで分析したときに弱い又は悪い判定を与えるベクトルがかなり見出された。これらのベクトルは、特に隣接するベクトルとの比較に置いて注意深く研究し、弱く悪い判定の不特定原因の存在を確認する必要がある。これは、シートの占有者の良好な画像を得られる位置に取り付けられた幾つかのカメラによってなされる。データセットアップの写真記録を持つことは、車両が路上しけんを受けている際に類似の結果が得られて場合にも有用である。路上試験の間もカメラは存在し、試験技術者はシステムが正しい応答をしないときは何時でもデータの収集を開始する必要がある。この現実世界試験のベクトル及び写真は、後に実験室の類似のサンプルと比較され、トレーニングされた車両の車両セットアップのマトリクスの誘導における誤りのデータが存在するか否かを見る。
17.自動化 車両におけるデータ収集の際に、車両のシート、シートバック、ウィンド、バイザー等の動作を自動化するのが望ましく、このようにして、小手他のアイテムの位置はシステム設計者が意図するようにコントロールされ分布される。これは、1つの配置でデータを取りすぎネットワークが不均衡になる可能性を最小にする。
【0089】
18.自動セットアップパラメータ記録 正確なデータセットを達成するために鍵となるセットアップのパラメータは、自動的に記録すべきである。これらは、車両内の種々の位置でのオンで及び、車両シート及びシートバックの位置、ヘッドレスト、バイザー及びウィンドの位置を含み、可能ならば車両占有者の位置を含む。これらのパラメータの自動記録は人間の誤差を最小にする。
19.レーザーポインタ 搭乗者及びパート面との表面に取り付けられたホーン全体での最初のデータ収集に間に、データ収集過程でトランスデューサが突発的に動かないように注意する。この可能性をチェックするために、小型のレーザーダイオードを各トランスデューサホルダーに挿入する。レーザーは、搭乗者コンパートメントの他の幾つかの面を照射するようにされる。
【0090】
20.多周波数トランスデューサ配置 動的な位置のずれについてデータを集積する場合、超音波トランスデューサの各々は異なる周波数で作動させ、全てのトランスデューサが同時に送信できるようにする。この方法により、データは各10ミリ秒毎に収集され、それは衝撃前の衝突前ブレーキの間に占有者の動きをおよそ把握するのに十分な速度である。35から70kHzの間の8つの周波数を見出すために、周波数の間隔は5kHzが必要である。従来の電気的フィルタを使用してキープアウトゾーンにおいて望ましい分解能を得るのに十分な間隔を与えるために、10kHzの間隔が望ましい。これらの不適合な要件は、トランスデューサを思慮深く配置することにより解決できる。このような配列の例を図11にしました。この実施例については、トランスデューサは以下の周波数で作動する:A 65kHz、B 55kHz、C 35kHz、D 45kHz、E 50kHz、F 40kHz、G 60kHz、H 70kHz。実際には、上記の概念に結合した他の配列も作動する。
【0091】
21.データ集積におけるPCの使用 トレーニング、独立及び確認データベースのためのデータ集積をするとき、種々のスクリーニング方法を使用してデータを試験し、データをモニタ上に表示するのが望ましいことが多い。よって、データ集積の間に、通常は、実験室でのデータ取り込みにはデスクトップPC、路上でのデータ取り込みにはラップトップPCを用いて過程を監視する。
22.参照マーカー及びゲージの使用 シート、シートバック、ウィンド等の位置の自動的記録の加えて、あるいはそれに代えて、種々の可視化マーキング及びゲージがしばしば用いられる。これは、シートバックの角度位置、シートトラックのシートの位置、ウィンドの開放などを含む。また、占有者の自動トラッキングが備えられていない場合、可視化マーキングが配設されて技術者は特定のデータ取り込み実験のために試験占有者が要求されるゾーンに存在することを観察する。空間に可視ラインを生成するためにレーザーダイオードが使用され、キープアウトゾーン又は他の望まれるゾーンの境界を表す。
【0092】
ここに記載した適合過程は、車両占有者に関する情報を提供するトランスデューサの任意の組み合わせに適用できることを認識するのは重要である。これらは、重量センサー、容量センサー、誘導センサー、湿度センサー、超音波、光学、赤外線、レーダーを含む。適合過程は、特定の車両モデルについての項をトランスデューサの選択で始まる。パターン認識システムは、獲得したデータを用いて開発され、精度評価がなされる。更なる実験は、もし存在するならば、設計から除外されるセンサーの決定をなす。一般に、設計過程は過剰のセンサープラス対象物から始まり、最終設備に幾つのセンサーが置かれるかによる。適合工程は、何れのトランスデューサが最も重要であり、何れが最も重要度が低いかを決定し、重要度の低いトランスデューサが除去されたシステムコスト及び複雑さを低下させる。
幾つかの好ましい方法を例示し、上に記述したが、自動車の搭乗者コンパートメント内部の異なる位置に配置された異なるセンサーの組み合わせもあり、それらは対象物の同じ又は異なる特徴を測定して、ここに記載したものと類似の目的を達成する。また、上記に加えて多数の付加的応用が、車両のドライバーシート、センターシート、又はリアシートの監視を含み、エアバッグシステムに加えて他の車両システムのコントロールを目的とする。本発明は、上記の実施態様に限定されず、下記の特許請求の範囲によって決定される。
【0093】
補足1
ニューラルネットワークトレーニング及びデータ前処理方法の分析−実施例
1.序文
空間感知センサー (Occupant Spatial Sensor) (OSS) の「頭脳」を形づくる人工ニューラルネットワークはエアバッグの状態のパターン(容易形と無力形)を認識するようにトレーニングしなければならない。トレーニングの中で最も重要な部分は自動車の中のいろんな条件で取られたデータである。そのデータは形状に適切にあたえる形を記述する。データの処理(例えばフィルターリング)はそのデータの中にある情報の質を上げる条件で適切になる。基本的な ネットワークのアーキテクチャ と使われたトレーニングの方法も大切である。その2つは人工ニューラルネットワークの学ぶことと概括の能力を決めるからである。方法とフィルター のテストとしては実用的に行われたテストが最もいい。
空間感知 センサー(OSS) はエアバッグをプログラミングする状態のパターン(容易と無力)を認識するために人工ニューラルネットワーク(ANN)を使う。パターンは自動車の前席の範囲を占める4つの 超音波受発信機で定める。4つ受発信機の信号は電気的に加工される反響信号から成り立っている。電気的な加工は増幅 (対数の 圧縮), デモデュレーション (周波帯変換フィルターリング)に伴い分離識別 (サンプリング) と信号のデジタル化を含んでいる。一つの必要なソフトウエアプロセシングは信号が人工ニューラルネットワークに入る前には正常化という(取られらデータを0 と 1の数にする)過程である。
データを何度も処理されているが、加工された信号は(情報が全部同じ方法で加工されるので)まだ「生」信号として認められている。
未加工の信号が人工ニューラルネットワークに入る前にはフィルターを適用するのは可能である。フィルターの目的はシステムの特色を改善するために、大切な情報の質を上げること。当追加には自動車の中にANNトレーニングする時に使われた幾つかのプレプロセッシングフィルターを記述している。
【0094】
2.データの記述
人工ニューラルネットワークの特色はシステム をトレーニングする時に使われたデータに基づく。データの量と可能性の分布域がシステムのパターンを認識することと概括の能力に影響させる。OSS向けのデータはベクトルから成り立っている。各ベクトルは4つの超音波受発信機から受け取った信号の大切な部分の組み合わせになっている。
典型的なベクトルは100加工の結果を含め、各結果は超音波受発信機で取った反響信号の(時間的にずれた)レベルである。
三次元のデータセットを集める。第1の種類はトレーニングのデータであり、エアバッグの展開か無展開のシナリオを認識できるANNに入れたパターンを持っている。第二のデータ種類は無所属のテストのデータ。第三データの種類は実用的な(実走行によって確認した)データである。当種類は人工ニューラルネットワークの効果率(成功率)を評価するために使う。
表1は自動車で取ったデータの3種類の特色を示す。データの種類は3に分けられる特徴付けている。形状の数値は人と物の数を現す。仕組みの数は自動車の中に形状と物の仕組み(席の仕組みや席の横になる角、自動車の屋根、窓、などの状態)の数を現す。ベクトルの数は人か物の動きの上で取られた仕組みの数と形状の数である。
【0095】
 【0096】
【0096】
1.1トレーニングデータセットの特徴
トレーニングしている時のデータはデータの分布を現す部分に分ける。表2はトレーニングしている時にデータが客席の3グループで(空席、乗客がいる席とチャイルドシート)の分布であることを現す。乗客はみんな大人であった。子供は前向きにチャイルドシートに座った子供だけであり、他の席座ることがなかった。表 3 はチャイルドシートを最も詳しく分類することを現す。表4は車内環境により分されたいろんなパターンを現す。
【0097】
1.2独立試験データの特徴
独立試験データを取るのにトレーニングデータと同じ形状や対象、オブジェクト、条件を使うのでその形状と分布もトレーニングデータと同じである。
1.3確認データの特徴
表5は分類された評価的なトレーニングデータの分布することを現す。その分布はトレーニングデータの仕組みに近い。しかし、今回参加した乗客は大人(全人数の27%)と並び子供(全人数の12%)も含めている。表 6は人間の 分布を表す。トレーニングデータテストと無所属のテストとは逆に、3歳から6歳までの子供がチャイルドシートに座る限定ではなかった。表7にはチャイルドシートの分類を現す。一方では移動した前向きのチャイルドシートについてのデータを取らなかった。子供とチャイルドシートのタイプもトレーニングデータテストと無所属のテストのタイプと違う。表8はいろんな車内環境の状態で取ることを現す.
【0098】
【0099】
3.ネットワークのトレーニング
基本的ネットワークは117入力節や2つの隠れた層にそれぞれ20節と7節、1の外出した層の1節からの4つレベルのフィードバックシステムから成っている。外出した層は超音波受発信機のこう後部(A), A−柱 (B),と上のコンソール(C, H)にある入力から成っている。表9は各チャンネルがベクトルを作っている点の数を表す 。
【0100】
人工ニューラルネットワーク は Neural Works Professional II/Plus というソフトにより操作する。数学的なパターンをトレーニングするために使われる方法としては拡張のDelta−Bar−Deltaを修得する規則とシグモイドトランスファー機能に基づくフィドバックである。拡張学ぶのDelta−Bar−Deltaという規則はグラジエントの前のバリューを用いる。故に各接続は個々修得範囲と個々インパルスパラメーターを持ち、自動的に計算する。
ネットワークは上記の記述されたトレーニングおよび無所属テスト・データ・セットを使用して、訓練された。最適(無所属のテスト・セットに対する)は3,675,000のトレーニング・サイクルの後に見つかった。各トレーニング・サイクルは650,000の利用可能なトレーニング・セット・ベクトルから任意に選ばれて、30のベクトル(時代として知られている)を使用する。テーブル10は、基線ネットワークの実行を示す。
【0101】
ネットワークの実行は、無所属のテストの部分集合に対する成功率の調査によりさらに分析される。エアバッグに対する成功率、94.6%で条件を可能にする、エアバッグに対するそれと事実上等しい、94.4%で条件を不能にする。表11は、様々な空間感知セットの部分集合用の成功率を示す。表12は環境上の条件部分集合用の成功率を現す。このデータの分布はマトリックスの全体にわたって全く平衡を保たれるとは限らず、システムの実行が熱源によって著しく下げられないことが結論を下されるかもしれない。
【0102】
3.1正規化
正規化は、ネットワークのトレーニングに受理可能な範囲への実際のデータ範囲を計るために使用される。 NeuralWorksソフトウェアは、一連の0〜1へ入力データをもたらすことを計る要因の使用に包括的に要求している。いくつかの正規化の方法はシステム実行に対するそれらの影響のために調査された。
実際のデータは12ビットデジタル化された信号から成る。0と4095の間の値を備えた。 図20は典型的な未加工の信号を示す。未加工のベクトルは4つの信号の結合したセクションから成っている。
個々のベクトルの正規化の3つの方法は検査された:
a.全ベクトル(基線)の最も高く最低である値を使用する正規化。
b.ベクトルを個々に構築するトランスデューサチャンネルの正規化。この方法は、各チャンネルの最も高く最低である値を使用する。
c.固定範囲 ([0、4095]) を備えた正規化。
【0103】
正規化研究の結果は表13に要約される。
より高い実行の結果は、1本当たりのチャンネルを正規化することにより対全ベクトルを通って、正規化することに起因する。これは、基線方法が別のものと比較して、1台のトランスデューサからの信号の相対的強弱度に含まれていた情報を保持するという事実から説明することができる。第2の方法を使用する場合、この情報が失われる。
【0104】
固定範囲を使用する正規化は、1つのベクトルの相対的強弱度に含まれていた情報を保持する。これから、基線方法のその上に固定範囲正規化でトレーニングされたネットワークの実行が増加することは期待される。しかしながら、正規化なしでは、入力範囲が、0から最大の値まで概しない(図1を参照)。入力層のデータの絶対値はネットワーク容量トレーニングに影響する(方程式[1]および[2]を参照)。ネットワークトレーニング中に、より小さな入力範囲を備えたベクトルは、十分な範囲を測るベクトルより各処理要素(ニューロン)で計算された容量に影響する。
Dwij [s] は、ネットワーク重量の変化; lcoef は学習係数; ej [s] は層sの中のニューロンjのローカルの誤差; xI[s]は層sの中のニューロンjの現在の出力状態である。
【0105】
入力層で評価における最高と最低の変動はネットワークのトレーニングに負の効果をもたらす。これは、評価データにより低く反映される原因になる。
正規化の第2の影響は、0〜1の十分な範囲上に信号を伸ばすことにより、包括的に信号の分解を増加させることである。ネットワークが信号の高いピークから修得するので、それは一般化能力に良い影響をを与え、評価も高くされる。
相対的なベクトルの強度に含まれていた情報を保持するよりネットワークトレーニングに入力価値の固定範囲および基線正規化方法に起因する、増加した解決の影響が、より強い効果があることが結論を下される。
【0106】
3.2低閾値フィルタ
未加工の信号に含まれていたすべての情報がネットワークトレーニングに役立つと考えるわけではない。低い振幅エコーは、トレーニング・データに含まれていてはならない超音波のフィールドの以外のオブジェクトから後ろに受け取られる。さらに、低い振幅雑音は様々な出所から、信号内に含まれています。この雑音は信号が弱いところで現われ、最も強い低閾値フィルタの使用によって、それらがネットワーク・トレーニングのために使用される前に、ベクトルの信号対雑音比は改善することができます。
3つの遮断レベルが使用された:信号の最大値(4095)の5%、10%および20%。使用される方法は、低閾値レベルまでのしきい値より下の値をもたらす。後のベクトル正規化(基線方法)は十分に信号を伸ばす範囲の[0、1].
【0107】
低閾値研究の結果は表14の中で要約されます。
【0108】
5%および10%のフィルタでトレーニングされたネットワークの実行は、基線ネットワークのそれに似ている。小さな実行低下は、20%のフィルタでトレーニングされたネットワーク用に観察される。これから、騒音レベルがネットワークトレーニングに影響しないのに十分に低いことは結論を下される。同時に、ネットワーク実行に影響せずに、信号のより低い10%を廃棄することができることは結論を下されるかもしれない。これは、信号が最大のフィールドの強度の10%と等しい、超音波のフィールドの以外の境界線の定義を許可する。
【0109】
4.ネットワークタイプ
一般的なネットワークはバックプロパゲーション(back−propagation)タイプのネットワークである。バックプロパゲーションにより帰ってきた情報は一般的な問題を解決し、予測、分類、システム・モデリング、フィルターリングのために使用されたネットワーク・パラダイムである。バックプロパゲーションが実際の出力と希望した出力間のエラーを計算し、ネットワ ーク中の各波節にこのエラー情報を広めることにより修得する。このバックプロパゲーションで広められたエラーは各ノードで修得を駆り立てるために使用される。バックプロパゲーションネットワークの利点がいくつかある。それがグローバルエラーを最小限にすることを試みて、それが、複雑なデータ・セットで非常にコンパクトに分けられた表現を提供することができることである。弱点はネットワークの分布された性質によりその遅い修得、および不規則な境界および予期しない分類地方である。また、限られていないトランスファーの使用は機能します。これらの弱点のうちのいくつかは、Extended Delta−Bar−Deltaパラダイムのような修正済のバックプロパゲーション方法の使用により克服することができる。 EDBDアルゴリズムは、ネットワーク(それはネットワークトレーニングの最適化を促進する)中の各接続の修得範囲および勢いを自動的に計算する。
【0110】
基線ネットワークとは異なっている特性を持っている、他の多くのネットワーク・アーキテクチャーもある。これらのうちの1つはロジコン射出ネットワーク(Logicon Projection Network)である。このネットワークは開いた境界ネットワーク(伝播(back−propagation)ネットワークはそれに属する)と閉じた境界ネットワークの種の利点を組み合わせている。閉じた境界ネットワークが入力データ・ポイントに直ちにプロトタイプを置くことができ、これらのプロトタイプに入力データをすべて一致させることができるので、修得して、閉じた境界ネットワークは速い。開いた境界ネットワークは、他方では、適正なgradientによって出力エラーを最小限にする能力を持っている。
【0111】
5.結論
確認データ・セットに対して92.7%の成功率に修得された基線の人工ニューラル・ネットワーク。このネットワークは4層伝播(back−propagation)アーキテクチャーを持っており、拡張デルタ棒デルタ(Extended Delta−Bar−Delta)修得規則およびsigmoidを使用し、機能を転送する。ポストプロセシング処理が“five consistent decision”フィルタを包含していた一方、前プロセシングはベクトル正規化を包含しました。
独立試験データのために使用された対象およびオブジェクトはそれらがトレーニングデータのために使用したのと同じ物でした。これはネットワークの分類および一般化の能力に悪い影響を及ぼす可能性がある。
独立テスト・データの空間の分布は、トレーニングデータのそれと同じくらい広かった。これは、空間の大量を横切って一般化することができるネットワークに帰着した。より小さなボリュームを横切ったより高い実行、ものが分布カーブの以外のより低い実行と結合して、正規分布のピークの近くで直ちに位置した、望ましい。
これを達成するために、無所属のテスト・セットの分布はシステム用の正常分布の反映(a.k.a.未加工の群)である必要がある。
【0112】
前処理方法の修正か追加の前処理方法の適用は、基線ネットワークのその上に実行の重要な改善を示さなかった。それが、固定範囲の中で入力価値を維持することにより修得を改善し、信号の解決を増加させるとともに、基線正規化方法は最良の結果を与えた。Low Threshold研究は、エコー・パターン中のより大きなピークからネットワークが修得することを示した。前プロセシング技術は、これらのピークを出す信号の解決を増加させることに向けられるべきだ。
原寸には満たないを使用して、固定範囲正規化と低閾値を組み合わせて、調査するために一層の研究を実行することができる。これは、0と1の間に写像することができる固定範囲へ有効に各ベクトルを強要して、飽和に低閾値の値および1つの値で少なくとも1ポイント含めることを各ベクトルに強いるだろう。相対的なベクトルの強度に含まれていた情報を保持している間、これは肯定的な結果に基線正規化に関係している。その後、スケーリングの結果、0〜1の範囲の外部で落ちる未加工のベクトル・ポイントは、0と1までそれぞれ写像されるだろう。
ポストプロセシングはメモリ機能を備えたネットワーク認識能力を増強するために使用されるべきだ。そのようなものの可能性は、空間の置く機能も両方のオブジェクト分類も実行する1つのネットワークの必要によって現在挫折する。空間の置く機能の実行は、急速にシステム・ステータスを更新する柔軟性を要求する。ネットワークによって不正確に分類される時折の模様の影響を無効にするために、オブジェクト分類は他方では、決定厳格から利益を得る。
【0113】
補足2
OPSシステムDOOPネットワークをトレーニング(修得)する過程。
1.消費者の要求および救出条件の決定。
1.1ゾーンの数。
1.2出力(アウトプット)の数。
1.3危険ゾーンの決定。
1.4重大な定義の範囲(つまり危険にひんしている空席、安全席、など)。
1.5DOOP処理の速度を決定してください。
2.プログラム用のPERT図表を開発する。
3.トランスデューサマウント(mount)のための実行可能な位置を決定してください。
3.1加工性
3.2再現性
3.3露出 (車生活の間の損害に有能でない)
4.取り付けロジスティクス位置を評価してください。
4.1フィールドの測定。
4.2マルチパスの反射。
4.3トランスデューサ目標(Transducer Aim)。
4.4障害物/望まれないデータ。
4.5視界の目標。
4.6主要なDOOP(Primary DOOP)トランスデューサ必要条件
5.プログラム(乗り物の本)のドキュメンテーション記録を開発してください。
6.車内のトレーニング変数を決定してください。
6.1座席軌跡ストップ。
6.2ハンドルのストップ
6.3席の角度。
6.4衝突の間のDOOPトランスデューサ封鎖状態。
6.5その他
7.車の中の危険ゾーンで決定しマークしてください。
8.物理的な妨害の位置を評価する
8.1取り付け空間/トランスデューサへの余地
8.2十分な困難を増大する表面。
8.3障害物
9.トレーニング、無所属、評価のDOOPデータ・セット用マトリックスを開発してください。
10.データ収集のために必要とされる必要な設備を決定してください。
10.1チャイルド・シート/ブースター・シート/チャイルド・シート など。
10.2地図/レザー/組み立て
10.3その他
11.フレックスタイムスケジュールテスト(Schedule sled tests)は、初期のDOOPネットワークおよび最終のDOOPネットワーク用にテストする。
12.DOOPのためのテスバック(test buck)を設計してください。
13.DOOP試験にはダミーの設計テスト。
14.任意の必要な変数を購入してください。
14.1チャイルド・シート/ブースター・シート/チャイルド・シート など。
14.2地図/レザー/組み立て
14.3その他
15.車属品の自動コントロールをトレーニングしてください。
15.1変数空席の状態で自動的な座席コントロール。
15.2変数空席の状態で自動的な席の角度コントロール。
15.3変数空席の状態の自動的なウィンドー・コントロール
15.4その他
16.自動コントロールを構築するために設備を得てください。
17.車変数の自動コントロールの構築とインストールをしてください。
18.データ収集助手(aides)をインストールしてください。
18.1温度計
18.2軌跡ゲージ。
18.3座席角度ゲージ、
18.4その他
19.スイッチとヒューズを取り付けた配線をインストールする:
19.1トランスデューサのペア
19.2レーザー
19.3決定指標(Decision Indicator)光線
19.4システムボックス。
19.5モニター。
19.6パワー自動化コントロール装置。
19.7温度計、ポテンシオメータ
19.8DOOP空間感知範囲の装置。
19.9DOOP空間感知範囲指標
19.10その他
20.OPSシステムコントロル・ボックスのためDOOPオペレーティング・ソフトウェアを書いてください。
21.OPSには DOOPオペレーティング・ソフトウェアを有効にしてください。
22.車のための特別なDOOPオペレーティング・ソフトウェアを使用して、OPSシステムコントロル・ボックスを作ってください。
23.システムコントロル・ボックスを評価して、記録をしてください。
24.車の特定のDOOPデータ収集ソフトウェア(pollbin)を書いてください。
25.車の特定のDOOPデータ評価のプログラム(picgraph)を書いてください。
26.DOOPデータ収集ソフトウェアを評価してください。
27.DOOPデータ評価ソフトウェアを評価してください。
28.OPSシステムボックスにDOOPデータ収集ソフトウェアをダウンロアドして、有効にしてください。
29.OPSシステムボックスにDOOPデータ評価ソフトウェアをダウンロアドして、有効にしてください。
30.データ収集ソフトウェアのDOOPデータ収集技術およびデータ収集ソフトウェア使用上で専門家を訓練してください。
31.トランスデューサの既知の変数に基づいて、プロトタイプ・マウント(mount)を設計してください。
32.プロトタイプ・マウント(mount)
33.前構築(pre−build)マウント(mount)
33.1マウント(mount)にトランスデューサをインストールしてください。
33.2クロス・トークを除去するために最適化してください。
33.3希望のフィールドを得てください。
33.4マウント(mount)用のDOOP必要条件の実行を有効にしてください。
34.マウント(mount)を記録する。
34.1フィールドの相対のプロット。
34.2すべてのマウント(mount) 次元を備えた図面。
34.3マウント(mount)中のトランスデューサ位置の図面。
35.乗り物にマウント(mount)を入れてください。
36.ATIが設計した装置と明細を使用して、乗り物 の中にフィールドを入れてください。
37.DOOPトランスデューサ組み立ての媒体中の実行を決定してください。
38.センサーボリューム3を決定してください。
39.乗り物にマウントしたトランスデューサおよびフィールドを記録してください。
39.1ATI明細化
39.2すべてのフィールドの写真。
39.3入れたマウント(mount)図面および次元。
39.4記録センサ・ボリューム。
39.5目標及びフィールドの図面および次元。
40.データ収集ソフトウェアおよびOPSシステムボックスを使用して、16枚のトレーニングテスト・データ、無所属のテスト・データ、評価のテスト・データを収集してください。
41.ANNを修得するために初期の条件を決定してください。
41.1正規化の方法。
41.2伝播(back−propagation) あるは
41.3容量、
41.4その他
42.前プロセス・データ
43.上記のデータを使用して、ANNを修得させてください。
44.必要ならばポストプロセシング戦略を開発してください。
45.ポストプロセシングを開発してください。
46.評価データおよび車内分析の視点からANNを評価してください。
47.初期のDOOP結果を確認するためにフレクスタイムテストを実行してください。
48.DOOP実験結果および実行を記録してください。
49.必要ならばマウント(mount)を分解し、も一度ステップ31〜48を繰り返してやってください。
50.消費者に会って、プログラムを調査してください。
51.消費者の指導でされた出力の戦略を開発してください。
51.1必要ならば最終のANNの多数の決定ネットワーク用戦略を開発をしてください。
51.2必要ならば最終のANNの多数の層ネットワーク用戦略を開発してください。
51.3DOOP層/ネットワーク52の戦略を開発してください。
52.毎日の測定ジッグを設計してください。
53.毎日の測定ジッグを構築してください。
54.毎日の測定テストを開発してください。
55.毎日の測定テストの結果を記録してください。
56.毎日の測定テスト結果の記録
57.消費者の指導で決まった出力にとって車データ収集パターンをやり直してください。
58.データ収集のためのゾーン感知システム(identifiers)を拡大してください。
59.すべてのデータ・セットの項目を定めてください。
60.データ収集プロセスの項目をトレーニングしてください。
61.データ収集ソフトウェアおよびOPSシステムボックスを使用して、16枚のトレーニングテスト・データ、無所属のテスト・データ、評価のテスト・データを収集してください。
62.プログラム指令によって定めたベクトルの合計を収集してください。その合計はANNの出力および複雑さによって変わる。
63.ANNを修得させるために初期の条件を決定してください。
63.1正規化の方法
63.2伝播(back−propagation) あるいは
63.3容量、
63.4その他
64.前プロセス・データ
65.上記のデータを使用して、ANNを修得させてください。
66.ポストプロセシングの戦略を開発してください。
66.1容量化
66.2平均化
66.3その他
67.ポストプロセシング・ソフトウェアを開発してください。
68.評価データを使用して、ANNを評価してください。
69.乗り物穴を探索し、分析および実行をしてください。
70.乗り物のnon sledマウント(mount)のDOOPテスト実行する。
71次の修得およびプロセシングの必要を決定する。
72.必要ならばステップ58〜71を繰り返してください。
73.初期DOOP結果を確認するためのそり(sled)テストの実行
74.DOOP試験結果の記録と性能
75.必要ならばステップ58から74の繰り返し
76.簡略な実行レポートを書いてください。
77.消費者に乗り物(車)を使ってのプレゼンテーション。
78.消費者にOPS装備をされた乗り物(車)を配達すること。
【図面の簡単な説明】
【図1】本発明に従って開発されたシステムの着席状態検知システムを示す図であり、超音波又は電磁気センサー、重量センサー、背もたれ角度検知センサー、シートトラック位置検知センサー、心拍センサー、動きセンサー、ニューラル・ネットワーク回路及びエアバッグシステムの間の接続が車両コンパートメント内に設置されている。
【図2】フロントシートに2人の大人占有者を含む車両の透視図であり、本発明で教示された方法に従って配置された超音波トランスデューサの一つの好ましい配置を例示する透視図に車両を示した。
【図3】図2の搭乗占有者を前向きチャイルドシート内の子供に置き換えた図である。
【図4】図2の搭乗占有者を後ろ向きチャイルドシート内の子供に置き換えた図である。
【図5】図2の搭乗占有者を幼児シート内の幼児に置き換えた図である。
【図6】2つの超音波センサーの相互作用及びこの相互作用がいかにしてサークルを空間内に配置するかを例示する図である。
【図7】図2の占有者を除去した図であり、2つのサークルの空間内の位置及びそれらがいかにして後ろ向きチャイルドシート及びより大きな占有者に特徴的な容積を横切るかを例示する。
【図8】3−トランスデューサシステムの好ましい取り付け位置を示す図である。
【図9】4−トランスデューサシステムの好ましい取り付け位置を示す図である。
【図10】2つのトランスデューサについての標的容量識別を示すプロットである。
【図11】8−トランスデューサシステムの好ましい取り付け位置を示す図である。
【図12】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図13】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図14】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図15】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図16】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図17】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図18】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図19】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図20】組み合わされてベクトルを形成する4つの典型的な生シグナルを示すチャート図である。
(発明の分野)
本発明は、車両内に位置する人や物の存在および場所を識別し、様々なオブジェクトを検知やコントロールまたは評価する装置の分野に関係がある。現在の発明は搭乗者のシートの存在の発見および自由にオブジェクトの状態より乗り物の占有を評価するためのシステムを開発する、効率的で、高度に確実な方法に特に関係があり、例えば、後部に面するチャイルドシート(RFCS)位置の搭乗者は位置していた。占有者保護装置と対話する。エアバッグのように、または、検知のために、1つの、位置からはずれて、占有する。 deploymentが、衝突がそれら自身を強要するより占有者へのより大きな傷に帰着するかもしれない場合、生じるシステムは、占有者保護装置のdeploymentのコントロールおよび選択的な抑制を許す。これは、一部分システム、パターン認識システム(恐らくトレーニングされたニューラル・ネットワーク)の使用、およびトランスデューサからの信号の斬新な分析のトランスデューサの特定の配置によって遂行される。
【0002】
新しいモデルへの占有者位置センサーの適用は、適用エンジニアリングと呼ばれる。占有者センサーのエンジニアリングが包含する適用はトランスデューサの位置を決定して、トランスデューサホルダーの設計、配線レイアウトの決定、トランスデューサ位置および角度のオリエンテーション上で寛容研究を実行すること、特別の乗り物モデル用の回路の設計、乗り物の中への回路の接続または統合、電子システム、また特別の乗り物モデルへの占有者センサー・システムを適応させすることでアプリケーションエンジニアリングの上記の様相はすべてシステム適応を例外として、新しいモデルへの任意の電子システムの適用エンジニアリングと著しく異ならない標準のプロセスである。しかしながら、システム適応は、それが特別の乗り物用に最適化されるシステムを作成することを相当な技術および専門知識、および斬新な技術の使用に要求するという点で独特である。
【0003】
(発明の背景)
占有者のサイズおよび位置、および事故の厳しさを説明するためにエアバッグに、あるいはそのエアバッグから流れるガスの量を調節するポンプがある。乗り物識別およびモニタリング・システム(VIMS)は米国で議論した。パテント Nos.5,829,782および5,943,295は、乗り物占有者の、あるいは後部に面する子供シートの存在および位置に基づいたそのようなポンプの働きをコントロールする。特別のモデルに内部モニタリング・システムを適応させて、高いシステム精度、およびより非常に詳しく下に議論されるような信頼度を達成する過程に関係がある。
【0004】
占有者識別および位置に、および衝突の厳しさによって、エアバッグのdeployment割合の自動調節は、「賢いエアバッグ」と名付けられた。賢いエアバッグの開発の中心となることは、現在の特許および特許出願に、特別モデルにそれらのシステムを適応させる、ここに記述された方法に占有者識別および位置決定システムである。賢いエアバッグの開発を完成するために、米国の1994年5月23日(番号08/247,760) の特許出願の「予期しての衝突を検知するシステム」のようなシステムはさらに望ましい。予期してに衝突を感じるインプリメンテーションに先立って、ニューラル・ネットワークワークの使用、衝突のタイプ、衝突加速署名の初期の側に基づいたその厳しさを識別する賢い衝突センサーは、開発されておりその後インプリメントされるべきだ。米国のパテント No. 5,684,701(種類)は、ニューラル・ネットワークに基づいた衝突センサーについて記述する。この衝突センサーは、他のすべての衝突センサーでのように、衝突がエアバッグのdeploymentを要求するために十分な厳しさであるならば、deploymentを始めるかどうか決める。さらに衝突を識別し、かつ占有者の特性および位置に(だけでなく)エアバッグdeploymentが一致することを可能にして、厳しさに関してそれをしたがって分類するように賢いエアバッグ衝突センサーに基づいたニューラル・ネットワークを設計することができる。また、衝突それ自身(これ、米国に記述されるパテント5,943,295番)の厳しさおよびタイミング。先の技術に関して、米国のパテントが言及される。
【0005】
Nos。 5,071,160(white at al.)、5,074,583(Fujita at al.)および5,118,134(Mattes at al.). しかしながら、システムが正確に乗り物の中のオブジェクトを識別し見つけることを可能にする、トランスデューサ位置を決定するかあるいは、アルゴリズムを引き出すか、他のシステム・パラメーター方法のこれらの特許の中でなされない。対照的に、即時の発明の1つのインプリメンテーションでは、興味のある搭乗者コンパートメント・ボリュームの全部分に対応するいくつかのミリ秒(milliseconds)の上のリターン超音波エコー・パターンは、多数のトランスデューサから分析され、搭乗者コンパートメントを占めるアイテム上の多くのポイントに距離情報を供給して、他のトランスデューサからの出力と時々結合した。
【0006】
この発明の教えの多くは、多数の教科書および専門的論文の中で教えられるようなパターン認識技術に基づく。この発明の診断の教えの中心となることは診断のモジュールが異常なパターンから正常なパターンを決定する方法、および利用可能な莫大な量のデータからどのデータを使用するべきであるか、それが決定する方法だ。これは人工ニューラル・ネットワークのようなパターン認識技術およびトレーニングを使用して、遂行される。多くの例を含むニューラル・ネットワークに関する理論は次のものを含む主題上でいくつかの本で見つけることができる:Techniques And Application Of Neural Networks, edited by Taylor, M. and Lisboa, P., Ellis Horwood, West Sussex, England, 1993; Naturally Intelligent Systems, by Caudill, M. and Butler, C., MIT Press, Cambridge Massachusetts, 1990; J. M. Zaruda, Introduction to Artificial Neural Systems, West publishing Co., N.Y., 1992 and, Digital Neural Networks, by Kung, S. Y., PTR Prentice Hall, Englewood Cliffs, New Jersey, 1993, Eberhart, R., Simpson, P. and Dobbins, R., Computational Intelligence PC Tools, Academic Press, Inc., 1996, Orlando, Florida、その、大部分はパターン認識技術に発展した。
【0007】
パターン認識の使用、あるいは特に、それがどう使用されるかは発明の中心となる。上記の引用された先の技術では現在の発明に割り当てられたそれ以外においては調整に基づくパターン認識が、ニューラル・ネットワークワークの使用によって例証されたとともに、乗り物の内部あるいは外部環境をモニターする際に使用のために言及されない。したがって、乗り物にそのようなシステムを適応させるために使用される方法はさらに言及されない。
【0008】
ここに使用されるようなパターン認識は、決定するためにオブジェクト(e.g。返された衝動あるいは受信だった衝動のパターンの代表者は揺れる、あるいは他の物理的性質、特定、に、または特性、またはそのオブジェクトの代表者)によって生成されるか、オブジェクトとの対話により修正される信号を処理する、すべてのシステムを一般に意味する、どれに、1セットのクラスのうちの1つにオブジェクトは属する。そのようなシステムは、オブジェクトが指定された1つのクラスのメンバーか、そうではないことを単に決めるかもしれません。あるいは、それは、指定されたクラスのより大きなセットのうちの1つにオブジェクトを帰するかそれがセット中のクラスのうちのいかなるもののメンバーではないことを知ることを試みるかもしれません。処理された信号は一般に情報の他の源は頻繁に含まれているが、聴覚の(超音波)あるいは電磁波(e.g、可視の光、赤外線放射線、キャパシタンス、あるいは電気界および磁界)に敏感なトランスデューサから来る一連の電気的信号だ。パターン認識システムは、パターンが認識されることを可能にする規則のセットの生成を一般に含んでいる。曖昧なロジック・システムはこれらの規則を作成することができる、統計相関性、あるいはニューラル・ネットワークのようなトレーニングされたパターン認識システムと同様にセンサー・フュージョン方法論によって。
【0009】
1つの、トレーニング可能、あるいは、ここに一般に使用されるようなトレーニングされたパターン認識システムは、様々な例にシステムをさらすことにより信号内に構成された様々なパターンを認識することを教えられるパターン認識システムを意味する。最も成功する、そのようなシステムはニューラル・ネットワークワークである。したがって、パターン認識アルゴリズムを生成するために、テスト・データは最初に得られ、それは返された波の多くのセットを構成する、あるいはオブジェクト(あるいは車内(つまりシートの上のスペース)でオブジェクトが位置しているだろうスペースから)およびそのオブジェクト(e.g。多くの異なるオブジェクトは各オブジェクトからユニークな波パターンを得るためにテストされる)の識別するの表示から、パターンを振る、そういうものとして、アルゴリズムは生成されコンピューター・プロセッサーに格納した。
【0010】
ここの目的のために「オブジェクト」という言葉の定義はレシーバーによって使用の間に受け取られた波パターンに基づいたオブジェクトの同一性となるもの。例えば、子供シートに面する後部は前方の面する子供シートとは異なっているオブジェクトである。そして1つの、位置からはずれて、大人は通常着席した大人とは異なっているオブジェクトである。ここに使用されるように識別することは、項目セットあるいはクラスにオブジェクトが属することを決めることを一般に意味するだろう。クラスは(例えば)子供シートに面する後部をすべて含んで、人間の占有者すべての牽制あるいはすべての人間の占有者、ない、現職、システムの目的に依存する子供シートに面する後部の中で。特別の人が認識されることになっている時に、セットあるいはクラスは単一の要素(つまり認識される人)だけを含む。乗り物あるいは占有者の中のオブジェクトあるいはシートの占めるアイテムは、人間あるいは犬のような生きている占有者、プラントのような別の生きている有機体、食料品店の箱かバッグのような無生物あるいは空の子供シートである。
【0011】
位置からはずれて、占有者のために使用されるように、一般にするだろう、手段、占有者、一方のドライバーあるいは搭乗者は、deploymentに先立って占有者保護装置(エアバッグ)に十分に接近している。事故によってよりも、彼または彼女はdeployment出来事それ自身によって重傷する。それは、さらに占有者がエアバッグのdeploymentの有益な抑制する影響に到達するためには適切に位置しないことを意味するかもしれません。エアバッグに接近している占有者に関しては、占有者頭あるいは胸が、エアバッグ・モジュールのdeploymentドアから約5インチのようなある距離より接近している場合、これが典型的に生じる。実際の距離、エアバッグdeploymentが抑えられるべき場合、値は、エアバッグ・モジュールの設計に依存し、ドライバー・エアバッグより搭乗者エアバッグには典型的に一層である。
【0012】
ここに使用されるようなトランスデューサは、発信機およびレシーバーのコンビネーションを一般に意味する。来る、ケース、他のものでは、互いに隣接している別個の2つの装置が使用されただろう間、同じ装置は発信機およびレシーバーとして両方に役立つ。ある場合には、発信機が使用されない。また、そのような場合、トランスデューサはレシーバーだけを意味するだろう。トランスデューサは、例えば、容量性、誘導、超音波、電磁気(アンテナ、CCD、CMOS配列)、測定する装置あるいは感じる装置に重みを加える。
【0013】
ここに使用されるような適応は、特別の占有者を感じるシステムが設計されており、特別モデルのために整えられる方法を表わす。それは、様々なトランスデューサの数、種類および位置が決定されるプロセスのようなものを含んでいる。パターン認識システムについては、それが、パターン認識システムが希望のパターンを認識することを教えられるプロセスを含んでいる。この接続では、それが、(1)トレーニング (調整)、(2)トレーニングのために使用されたデータ・ベースの組立て、特別のシステムをテストし有効にすること、あるいは選ばれたニューラル・ネットワークワークの場合には特別のネットワークワーク・アーキテクチャーの方法、(3)環境上の影響がシステムに組み入れられるプロセス、および(4)データの前処理(前プロセシング)あるいはポスト処理(ポストプロセシング)を決定する任意の過程。上記のリストは実例となう。そして徹底的でない基本的に、適応は、正確に識別し、占有者の位置あるいは他のものが乗り物の中で反対することを決めるシステムを作成する、特別の乗り物に、トランスデューサおよび情報の源を適応させるために保証されるステップをすべて含んでいる。
【0014】
予期し感じることのオブジェクトに関して使用された時接近する用語あるいは別のものに接近する乗り物で記述の中でここに、予期センサー・システムがある乗り物へのオブジェクトの相対的な運動を一般に意味する。したがって、木を備えた側面のインパクトでは、木は、乗り物の側に接近し乗り物を密着させることと見なされる。言いかえれば、一般の中で使用される座標系は目標乗り物に存する座標系になる。目標乗り物は密着させられている乗り物である。この協定は、一般的な記述がその場合をすべてカバーすることを可能にする、どこで(i)、動いている乗り物、静止している乗り物の側の中へのインパクト、(ii)、両方の乗り物が移動している。それが衝撃を与える。あるいは(iii)、静止している乗り物の側面に移動している木または壁。ここに、波センサーか波トランスデューサも任意の装置(それは波を感じる)で、超音波、あるいは電磁気。電磁波センサーは、例えば、電磁気のスペクトルの任意の部分を感じる装置を含んでいる、から、数ヘルツまでは紫外線。最も一般に用いられている種の電磁波センサーはCCDとCMOSの配列を含んでいる。このために、感じる、可視、または赤外線、ミリメートル波およびマイクロ波レーダー、そして容量性あるいは電気的なセンサー、およびスペースを占めるオブジェクトの誘電率に依存する磁界モニタリング・センサー。この点では、例えば米国の特許:Kithil、5,366,241、5,602,734、5,691,693、5,802,479および5,844,486、Jinno、5,948,031.
【0015】
それがモニタリング・システムを強健で確実で、正確にするので、ニューラル・ネットワーク(すなわち神経の曖昧なシステム)の使用はトレーニング方法のような特別の乗り物にこれを適応させる、パターン認識技術および方法として、この発明にとって重要である。ニューラル・ネットワークワーク・プログラムによって作成され、生じるアルゴリズムは通常Cコンピュータ言語で書かれたコードの数百行だけで、一般的な少数のラインにある。米国の技術のパテントNos. 5,008,946(Ando)、5,298,732(Chen)および5,305,012(Faris)がインプリメントされる。その結果、それらを自動推進の適用には実際的にする、低コストで生じるシステムをインプリメントすることは容易である。例えば、1年当たり100万ドルの中の1ドルに未満で超音波のトランスデューサのコストがあると予想される。同様に、ニューラル・ネットワークおよび類似したトレーニング可能なパターン認識技術を備えたインプリメンテーションが1年当たり100万ドルの中の5ドルに未満で典型的にかかる、低コスト・マイクロプロセッサーの使用を許している一方、参照が上記の付けられた特許の技術のインプリメンテーションは、高価なマイクロプロセッサーを要求する。
【0016】
現在の発明は、ニューラル・ネットワークのようなトレーニング可能なパターン認識アルゴリズムを開発する、精巧なソフトウェアを使用する。通常、様々な特徴抽出技術を使用して、下に議論されるように、データはあらかじめ処理される。また、結果はシステム精度を改善するためにポスト処理される。ニューラル・ネットワークをソナー合図をすると使用するそのようなパターン認識システムの自動推進でない例は:
Gorman, R. P. and Sejnowski, T. J. “Analysis of Hidden Units in a Layered Network Trained to Classify Sonar Targets”, Neural Networks, Vol. 1. pp. 75−89, 1988, and “Learned Classification of Sonar Targets Using a Massively Parallel Network”, IEEE Transactions on Acoustics, Speech, and Signal Processing, Vol. 36, No. 7, July 1988. フィーチュア抽出技術の例は米国の特許で少しもなく見つけることもできる:“Process and Apparatus for the Automatic Detection and Extraction of Features in Images and Displays” to Green et al. 他のものの例はもっと進み、米国の特許で効率的なパターン認識技術を少しもなく見つけるために:Examples of other more advanced and efficient pattern recognition techniques can be found in U.S. Patent No. 5,390,136 entitled “Artificial Neuron and Method of Using Same” and U.S. Patent No. 5,517,667 entitled ”Neural Network That Does Not Require Repetitive Training” to Wang, S. T.. Other examples include U.S. Patent Nos. 5,235,339 (Morrison et al.), 5,214,744 (Schweizer et al), 5,181,254 (Schweizer et al), and 4,881,270 (Knecht et al).
一般に、レーザーおよび非レーザー光学のシステムはイメージの次元の2つの平面内のオブジェクトの位置の決定でよい、また、走査モードにおけるパルス・レーザー・レーダー・システムが、飛行の時間の測定によりレシーバーからのイメージの各部分の距離を決定することができる、範囲ゲーティング技術によって。非レーザーシステムを備えた距離を決定することはさらに可能である。あるいは立体画法的(stereographically)に2のレシーバーを別々に間隔を置き、使用される。また、ある場合には、視界の分野での単なる位置は例えばエアバッグに関する位置を評価するために使用することができる。最終的に、1つの、最近開発されていた、定量をよく律動的に送った、ダイオード・レーザーはさらに米国の臨時の特許の出願で議論されるような低費用の距離測量を提供する。 60/114,507、ファイルされた1998年12月31日。
【0017】
単純な電子回路が設計されていることを比較的低い音速が可能にし、最小のマイクロプロセッサー能力が要求されるので、聴覚のシステムは距離測量でさらに有効である。 z軸がトランスデューサから占有者まである場合、座標系が使用される場合、音響学は、単一のCCDかCMOS配列を使用する単純な光学のシステムがxとyの次元の測定でよい間、z次元を測定することでよい。音響学と光学のコンビネーションは、1つの位置から、一般に割り当てられる米国のパテントで議論されるような低コスト・コンポーネントで3つの測定がすべて作られることを可能にする。 Nos. 5,845,000と5,835,613.
【0018】
これらの考えを使用するシステムの1つの例はレンズおよびレシーバー配列(e.g)と結び付けられた、赤外線光で助手席を氾濫させる、光学のシステムである。CCDあるいはCMOS配列、それはCCDかCMOSの出力をデジタル化し、Artificialニューラル・ネットワークワーク(Artificial Neural Network)(ANN)あるいは分析用の他のパターン認識システムにそれを与える、反映された光、およびADトランスデューサ(ADC)を受け取り表示する。このシステムは、助手席に位置したオブジェクトへの距離の測定のために超音波の発信機およびレシーバーを使用する。受信トランスデューサは、ADCにそのデータを供給する。また、そこから、変換されたデータは、ANNに向けられる。同じANNはANNが分析するために十分な三次元のデータを提供して、両方のシステムのために使用することができる。低コスト・コンポーネントを使用するこのシステムは正確な識別および単独で作用する一方のシステムによって可能でない距離測量を許す。調整された配列システムがシステムの聴覚の部分に加えられる場合、光学の部分はドライバーの耳の位置を例えば決定することができる。また、調整された配列は、位置に狭いビームを向けることができ、占有者の耳への距離を決定することができる。
【0019】
距離測量のためのultrasoundの使用は多くの長所を持つが、さらに、それはいくつかの欠点を持っている。最初に、音速は、占有者の位置がおよそ10 ミリ秒(milliseconds)に更新することができる割合を制限する。また、ほとんどの場合に十分が、占有者の位置が乗り物衝突の間に追跡されることになっている場合、例外である。次に、超正常な波は、ヒーターか空気調節装置が操作される場合、あるいはトランスデューサを過ぎた空気の高速気流がある場合、生じることができる空気密度の変化によって回折(diffract)される。第3に、その波長によって、トランスデューサ(それらは高いQである)によって制限されている、装置を合わせた。典型的に、正常なことの解決は3インチまで約2(約)である。最終的に、超音波のトランスデューサからのフィールドは、望まれないオブジェクトあるいは表面からの影がデータに雑音を加えるようにコントロールすることが困難である。
【0020】
超音波学は参照が上記の付けられた特許および特許の出願、および米国の項目に記述されるような自動車の搭乗者コンパートメントの内部のモニターのためにいくつかの構成の中で単独で使用することができる。パテント No. 5,943,295. この発明の教え、超音波の最適の数および位置、および光学のトランスデューサの使用は、特別モデルの適応プロセスの一部として決定される。
使用されるトランスデューサの数にかかわらず、より詳細に下に議論されるように、トレーニングされたパターン認識システムは、上に定義されたとともに、識別し分類するために使用される、そして見られるいくつかのケース、照らされたオブジェクトおよびその構成要素に。
【0021】
この技術のためのアプリケーションは多数である。しかしながら、主要な焦点は位置に直面する後部の占められた子供シートの存在の検知のために参照が上に付けられた特許および特許の出願中のシステムを適応させする過程、および生じる装置である。あるいは1つの、位置からはずれて占有者、および正常にすわる場所の占有者の検知。前の2つのケースでは、占有者保護装置(エアバッグ)のdeploymentがコントロールされ恐らく抑えられるかもしれないし、後のものでは、それがコントロールされ可能になるように、システムが設計されている。
【0022】
最初の生成占有者を感じるシステム(それはここに示された教えを使用して、様々な乗り物モデルに適応される)の好ましい1つのインプリメンテーションは、超音波の占有者位置センサーである。このシステムはパターンを認識するためにArtificialニューラル・ネットワーク(Artificial Neural Network)(ANN)を使用し、それは、一方のエアバッグとして識別するようにトレーニングされた、可能、あるいはエアバッグの作動条件を不能にする。パターンは、エリアを着席させる正面の搭乗者をカバーする、超音波の4台のトランスデューサから得る。このパターンは、助手席エリアのオブジェクトを離れて弾む、超音波エコーから成る。 4台のトランスデューサの各々からの信号は、リターン・エコー(それらはエレクトロニクスによって処理される)の電気的なイメージから成る。電子処理は、信号の個別化(サンプリング)および数字化を後に続けて、増幅、対数の圧縮、整流および復調(バンドはフィルタリングを渡する)を包含する。要求されたただ一つのソフトウェア処理、人工ニューラル・ネットワークにこの信号を供給することができる前に、正常化(つまり、数に0と1の間に入力を写像して)であろ。これは公平な量の処理だが、情報がすべて等しく扱われるので、生じる信号は未加工であるとなお考えられる。
【0023】
(本発明の目的及び概要)
一般に、本発明の目的は、車両内の物体の存在、位置及び/又は姿勢を同定するための新規で改善された方法を提供することである。
本発明の他の広い目的は、エアバッグが展開されたときに後ろ向きのチャイルドシートに衝撃を与える場合にエアバッグ等の占有者保護装置が展開するのを防ぐために、占有された後ろ向きチャイルドシートの存在を正確に検出するためのシステムを提供することである。
また本発明の他の広い目的は、エアバッグがその初期展開相の間に占有者の頭又は胸を圧迫して占有者に傷害や死亡させる可能性がある場合にエアバッグ等の1又は複数の占有者保護装置が展開するのを防ぐために、位置のずれた占有者の存在を正確に検出するシステムを提供することである。
【0024】
この発明は、その一部及び搭乗者コンパートメントの他の目的物、特に後ろ向き位置の占有されたチャイルドシート又は位置のずれた占有者を含む占有者を、車両内部に超音波又は電磁波を照射することにより、例えば、波発生装置からの照射をシートの上部空間に伝達し、車両搭乗者コンパートメントに特定の予め決定された最適位置に正しく配置された2又はそれ以上のトランスデューサを用いてシート上部空間を通ることにより変調した照射を受信することによって同定し、位置決めし、及び監視するために設計されたシステムである。より詳細には、本発明は、これまで不可能であった正確な認識を達成するために、適当に配置され取り付けられた複数のトランスデューサを含み、波を変調させる任意の目的物からの受信した照射を分析するシステムに関する。受信機からの出力は、内容物を分類、同定及び/又は位置決めし、及び/又は例えば後ろ向きチャイルドシートの向きを決定するために、トレイン(train)されたパターン認識技術を用いた適当な計算機手段によって分析される。一般に、同定及び監視システムによって得られた情報は、車両内の幾つかの他のシステム、部材又は装置、特に搭乗者及び/又はドライバーエアバッグシステムの操作に影響を与えるように使用され、エアバッグは、フロントエアバッグ、サイドエアバッグ、膝クッション、又はそれらの組み合わせを含みうる。しかしながら、得られた情報は、複数の他の車両システムの操作を調整又は影響を与えるために使用することもできる。
【0025】
本発明に従う車両内部監視システムは、膨張式エアバッグなどの占有者保護装置を備えた自動車車両の搭乗者コンパートメントに搭載され、衝突センサーが保護装置が展開すべきであると決定するのに十分な激しさで車両が衝突すると、システムは、チャイルドシートに後ろ向きに配置された子供が存在するか否かを(通常は展開に先立って)決定し、もし存在する場合は、シグナルがコントロール回路に送られてエアバッグがコントロールされ、最も現実的には衝突において展開が不可能にされるか展開しない。圧縮展開ではなく、展開は占有された後ろ向きのチャイルドシートに有意な保護を与えると理解すべきである。本発明の教示を用いて開発されたシステムは、エアバッグに対する車両占有者の位置も決定し、占有者が、エアバッグの展開によって傷害を受ける可能性がある位置にいる場合は、エアバッグをコントロールして、展開を不可能にしうる。上記のように、展開は不可能にする必要はないが、位置のずれた占有者に保護を与えるようにコントロールしうる。
【0026】
本発明に従う方法の概念的目的及び利点は以下のことである:
1.自動車の特定のシートにおける後ろ向きのチャイルドシートの存在を認識するためのシステムを開発及び改作する信頼できる方法を提供すること。
2.自動車の特定のシートにおける人間の存在を認識するためのシステムを開発及び改作する信頼できる方法を提供すること。
3.自動車における占有者の位置、速度又は大きさを決定するためのシステムを開発及び改作する信頼できる方法を提供すること。
4.占有者がずれた位置にいるか、ずれようとしており、展開したエアバッグにより傷害を受け易くなることを適時に決定するためのシステムを開発及び改作する信頼できる方法を提供すること。
5.搭乗者コンパートメント内部に、目的物の分類及びそれらの位置がトランスデューサによって発生する信号から高い信頼性で得られる特定の位置にトランスデューサを配置する方法を提供すること。
6.シートベルトペイアウト(payout)センサー、シートベルトバックルセンサー、シート位置センサー、シートバック位置センサー、及び重量センサーを含む種々のトランスデューサをシステムに組み込む方法を提供し、電磁気、超音波又は他の照射センサーと組み合わせて使用した時に、システムを、高い信頼性の占有者存在及び位置システムを提供するように改作すること。
【0027】
従って、車両の搭乗者コンパートメントにおけるシートの占有状態を決定するためのシステムを開発する方法の第1の実施態様は、車両内にトランスデューサを取り付け、当該トランスデューサがシートの占有状態によって影響を受けるものであり、各々のデータセットが異なるシートの専有状態を表し、シートが当該専有状態にある間にトランスデューサからのデータを受信し、トランスデューサからのデータを処理することにより形成される複数のデータセットを含む少なくとも1つのデータベースを作成し;そして、シートの占有状態を表わすデータセットを入力した際にシートの占有状態を示す出力を発生することができる少なくとも1つのデータベースから第1のアルゴリズムを作成する工程を含んでなる。新たなデータベースは、例えばm、アルゴリズムが車両のコントロール回路にインストールされた後に車両を使用している間に形成される。第1のアルゴリズムは、アルゴリズム作成プログラムにデータベースを入力し、そして、第1のアルゴリズムを作成するアルゴリズム作成プログラムを実行させることにより作成してもよい。第1のアルゴリズムは、ニューラル・ネットワーク・アルゴリズムであってよく、その場合は、ニューラル・ネットワーク・アルゴリズムを作成する際にバックプログラム法を使用できる。
【0028】
シートの占有状態は、占有又は非占有の後ろ向き幼児シート、前向き人間、位置のずれた人間、占有又は非占有の後ろ向きチャイルドシート、及び空のシートを含む群から選択される目的物によるシートの占有を含む。またシートの占有状態は、複数の姿勢の目的物及び/又は新聞、本、地図、瓶、玩具、帽子、コート、箱、鞄及び毛布を含む非排他的な群から選択される少なくとも1つの付属品による占有を含む。
データからデータセットを形成する前にデータを前処理してもよい。これは、データセットにおけるデータの特徴から作成されたデータを使用してもよく、この特徴は、正規化係数、ピークに先立つデータ点の数、ピークの総数、及びデータセットの平均又は分散を含む群から選択されうる。また、データは、正規化、切り捨て、対数変換、シグモイド変換、データの時間閾値化−平均化、フーリエ変換及び/又はウェーブレット変換を用いて数学的に変換してもよい。さらに、前処理は、一のデータセットのデータを他のデータセットの対応するデータから差し引いて、差分データの第3のデータセットを作成してもよい。
【0029】
処理工程は、トランスデューサからのアナログデータをデジタルデータに変換し、複数のトランスデューサからのデジタルデータを組み合わせて各トランスデューサからのデータ列を含むベクトルを形成する工程を含んでもよい。その場合、第1のアルゴリズムは、新たなデータセットからのベクトルの入力に際して、車両シートの占有状態を表す出力を生成するように作成される。データベースのベクトルを正規化し、各ベクトルを含むデータの全ての値が最大値と最小値の間になるようにすることができる。
車両の搭乗者コンパートメントにおける車両シートの占有状態を決定するためのシステムを開発する他の方法は、搭乗者コンパートメントの種々の位置における種々の占有物体を表すデータを得ることによりデータセットを作成し、データの少なくとも一部を操作してデータセットにおける最大データ値の大きさを最小データ値に対して縮小させ、複数のデータセットを含むデータベースを形成し、そして、当該シートの占有状態を表すデータセットを入力した際に車両シートの占有状態を示す出力を生成することのできるデータベースからアルゴリズムを作成する工程を含んでなる。データを操作する工程は、概算対数変換関数を用いてもよい。
【0030】
本発明に従って、車両シートの占有状態を決定するためのシステムの開発に使用するためのデータベースを開発する方法は、車両内にシートの占有状態によって影響を受けるトランスデューサを取り付け、シートを初期の占有状態とし、トランスデューサからデータを受信し、トランスデューサからのデータを処理して車両シートの初期占有状態を表すデータセットを形成し、シートの占有状態を変化させて他のデータセットを形成するデータ集積工程を繰り返し、各々が異なるシートの占有状態を表す少なくとも1000データセットを第1のデータベースに集積し、第1のデータベースのデータセットの殆どについてのシートの占有状態を正しく決定する第1のデータベースからアルゴリズムを作成する工程を含む。アルゴリズムの作成に使用しなかったデータセットの第2のデータベースを用いてアルゴリズムを試験される。アルゴリズムによって正しく決定されなかった第2のデータベースにおける占有状態が同定され、正しく決定されなかった状態に類似する占有状態を含む新たなデータが集積される。新たなデータを第1のデータベースと組み合わせて、組み合わせたデータベースに基づいて新たなアルゴリズムを作成し、そして、この工程をアルゴリズムの所望の精度が達成されるまで繰り返す。
【0031】
車両の搭乗者コンパートメントシートの占有状態を決定するためのシステムを開発する他の方法は、車両に複数の超音波トランスデューサを取り付け(これらのトランスデューサはシートの占有状態によって影響を受ける)、各トランスデューサからアナログ信号を受信し、トランスデューサからのアナログ信号を処理して、車両の占有状態を示す各トランスデューサからの複数のデータ値を含むデータセットを形成し、前記データ処理がデジタルデータのデータセットを生成するためのトランスデューサデータの復調、サンプリング及びデジタル化を含み、複数のデータセットを含むデータベースを形成し、そして、シートの占有状態を表わす新しいデータ・セットの入力の際にシートの占有状態を示す出力を生成することができるデータ・ベースから少なくとも1つのアルゴリズムを作成する工程を含んでなる。
【0032】
車両の搭乗者コンパートメントの車両シートの占有状態を決定するためのシステムを開発する更に他の方法は、車両に1組のトランスデューサを取り付け、トランスデューサからデータを受信し、トランスデューサからのデータを処理して車両の占有状態を表すデータセットを形成し、複数のデータセットを含むデータベースを作成し、新たなデータセットの入力に際して車両シートの占有状態を示す出力を生成することができるデータベースからアルゴリズムを作成し、システム精度の基準を開発する工程を含む。トランスデューサセットから少なくとも1つのトランスデューサを除去し、減少した数のトランスデューサからのみのデータを含む新しいデータベースを作成し、新しいデータベースに基づいた新しいアルゴリズムを開発し、そして新システム精度を決定するための新しいアルゴリズムを試験する。トランスデューサ除去、アルゴリズム開発及び試験の工程は、求められる正確さを有するアルゴリズムを作成する最小数のセンサーが決定されるまで継続する。トランスデューサは、超音波トランスデューサ、電磁気センサー、光学センサー、容量センサー、重量センサ、シート位置センサー、シートバック位置センサー、シートベルトバックルセンサー、シートベルトペイアウトセンサー、赤外線センサー、誘導センサー、電場センサー及びレーダーセンサーからなる群から選択される。
【0033】
車両のドライバー及び助手席の占有状態を決定するためのシステムを開発する更に他の方法は、異なる送信及び受信周波数を持つ超音波のトランスデューサを車両内に取り付け、トランスデューサからのデータを受信し、トランスデューサからのデータがを処理して車両の占有状態を表すデータセットを形成し、複数のデータセットを包含する少なくとも1つのデータベースを作成し、そして、新しいデータセットの入力の際に車両シートの占有状態を示す出力を生成することができる少なくとも1つのデータベースからアルゴリズムを作成する工程を含んでなる。
これら及び他の目的及び利点は、本発明の車両同定及び監視システムの好ましい実施態様の以下の説明から明らかになるであろう。
添付の図面は、本発明の教示を用いて開発及び改作されたシステムの実施態様の例示であり、特許請求の範囲に包含される発明の範囲を制限することを意味しない。特に、以下の例示はシステムを記述する目的でフロント搭乗者シートの監視に限られている。当然のことながら、本発明は車両内の他の着席位置、特にドライバー位置のシステムにも同様に適用される。
【0034】
(好ましい実施態様の詳細な説明)
システム適合は、それにより特定の車両についてのハードウェア配置及びソフトウェアアルゴリズムが決定されるプロセスを含む。各車両モデル又はプラットホームは、異なるハードウェア配置及び異なるアルゴリズムを持つ可能性が高い。このプロセスを構成する種々の態様は以下の通りである:
・トランスデューサの取り付け位置及び照準の決定。
・トランスデューサ場の角度の決定。
・アルゴリズム作成を補助するためにNeuralWareから市販されているもの等のニューラルネットワークアルゴリズム作成プログラムの使用。
・ニューラルネットワークトレーニングを目的とする車両におけるデータ集積の工程。
・データ集積の間の車両座席などの自動的移動の方法。
・高いシステム信頼性を達成するのに必要な獲得及びセットアップすべきデータ量の決定、典型的には数十万ベクトル。
・温度勾配などの変動する環境条件でのデータの集積。
・各データセットアップの写真撮影。
・異なるデータベースの構成及び三次元データベースの使用。
・前向き人間についてより高い可能性を与えるためにバイアスされるデータを決定する方法。
・データ一体性を確実にするための座席、シートバック、ヘッドレスト、ウィンド、バイザー、アームレスト位置を含む車両セットアップの自動的記録。
・トランスデューサ配置が変動しないことを確認するための日々のセットアップの使用。
・悪いデータをデータベースから削除する方法。
・トレーニング工程におけるデータのフーリエ変換及び他の前処理の導入。
・例えば分類及び位置についての複数のネットワークレベルの使用。
・複数のネットワークの平行的使用。
・処理後フィルタの使用及びこれらのフィルタの特性。
・ファジー理論及び他の人間知能に基づく規則の付加。
・例えばニューラルネットワークを用いたベクトル誤差の修正方法。
・パターン認識アルゴリズム作成システムとしてのニューラルワークの使用。
・トレーニングからのバックプロパゲーションニューラルネットワークの使用。
・ベクトル正規化の使用。
・以下を含む特徴抽出技術の使用:
ピーク以前のデータ点の数。
正規化係数。
ピークの総数。
ベクトル平均及び偏差。
・遺伝的アルゴリズムなどの他の計算機知能システムの使用。
・データスクリーニング技術の使用。
・旧及び新ネットワークの概念を含む安定なネットワークの開発に使用される技術。
・安定なネットワークに到達する方法で消費される時間又は繰り返し数。
・16シートといった最初に集積される少量のデータに次いで完全にデータ集積される順序の技術。
【0035】
システムの適合工程は車両モデルの外観から開始される。任意の存在するセンサー、例えば座席位置センサー、シートバックセンサー等は、システムへの導入のための直接的な候補で亜r。消費者からの入力は、どのタイプのセンサーが最終システムに許容されるかを決定するであろう。これらのセンサーは、座席構造に取り付けられた重量センサー、パッド型センサー、圧力型重量センサー、座席前又は後位置センサー、座席垂直位置センサー、座席角度位置センサー、シートバック位置センサー、ヘッドレスト位置センサー、超音波占有者センサー、光学占有者センサー、容量センサー、誘導センサー、レーダーセンサー、車両速度及び加速度センサー、ブレーキセンサー、シートベルト力、ペイアウト及びバックルセンサー等を含む。次いで候補となるセンサーアレイが選択され、車両に取り付けられる。
また、車両は人間によるデータ入力を最小にするように構成される。よって、座席、窓、サンバイザー、アームレストなどの車両の種々の部材の位置は自動的に記録される。また、データを取り込んでいる間の占有者の位置は、直接超音波範囲センサー、光学範囲センサー、レーダー範囲センサー、光学トラッキングセンサー等の種々の技術を介して完全に記録される。集積された各ベクトルい対応するセットアップ又は幾つかの適当な頻度で写真を撮るために設置される。
【0036】
車両セットアップの標準的な組は、最初の試験的なデータ集積目的のために選択される。典型的には、最初の試験は20,000から100,000の間からなる。
最初のデジタルデータ集積は、ここで試験セットアップマトリクスのために進める。データはトランスデューサから集積され、デジタル化され、組み合わされてニューラルネットワークプログラムによる分析のための入力データのベクトルを形成する。この分析は、100%に近いトレーニング精度を生ずるべきである。これが達成されない場合、システムに付加的なセンサーを追加するか、配置を変化させ、データ収集と分析を続ける。
搭乗者コンパートメントにおける目的物の種々の着席状態に加えて、試験データベースは熱灯及びエアーコンディショナー及びヒーターの操作によって生ずる温度勾配といった環境効果を含む。そのようなマトリクスのサンプルを補足1に示す。ニューラルネットワークが試験データベース上でトレインされた後、試験データベースは誤差を含む結果を生ずるベクトル(それは悪いデータと考えられる)についてスキャンされる。現在のケースに伴うベクトルと共にこれらのベクターの実験は写真と比較され、誤差データが存在するか否かが決定される。その場合、誤差データの原因を決定する努力がなされる。原因が見出された場合、例えば電力ライン上の電圧スパイクがデータを破壊した場合には、当該ベクトルをデータベースから削除し、データ修正工程を正して、この妨害を除去する努力がなされる。
【0037】
このとき、幾つかのセンサーをセンサーマトリクスから除外してもよい。これは、どの影響が結果をもたらすかを知るための分析から選択的にセンサーデータを削除することにより、ニューラルネットワーク分析の間に決定される。しかし、センサーが車両に最初に導入されると、将来のデータ集積及び分析において全てのセンサーを使用するのに付加的な出費が殆どいらないので、ここで注意しておかなければならない
この第1相で開発されたニューラルネットワークは、次の相におけるデータ集積の間に使用され、同時に集積された新たなベクトルの一体性のチェックをする。場合によっては、電圧スパイク又は他の環境的妨害は、幾つかのトランスデューサからのデータに瞬間的な影響を及ぼす。この事象をとらえるのは、第1にそのデータをデータベースから削除するために、第2に誤差データの原因を孤立させるために重要である。
【0038】
集積すべき次のデータの組はトレーニングデータベースである。おれは、最初に集積される最大のデータベースであり、例えば補足1に列挙するセットアップを包含する。トレーニングデータベースは、500,000又はそれ以上のベクトルを含み、ニューラルネットワークのトレーニング開始に使用される。これを考慮に入れて、独立及び確認データベースの補足1に従って付加的なデータが集積される。トレーニングデータベースは、車両内で起こりうることが知られた全ての着席状態を均一にカバーするように選択される。独立データベースは、トレーニングデータベースの構築と類似であってもよく、又は確認データベースの占有状態分布により近く適合するように改良されてもよい。ニューラルネットワークトレーニングの間、独立データベースは、ニューラルネットワークの精度をチェックするために使用され、独立データベースに対して測定したときに、その精度が以前のネットワーク構築より低ければ、候補としたニューラルネットワーク設計を拒否する。
独立データベースは、ニューラルネットワークのトレーニングで実際に使用されないが、それにも関わらず、それはネットワーク構造に有意な影響を及ぼすことがわかった。従って、第3のデータベース、確認又は現実世界データベースは、選択したシステムの最終的な精度チェックに使用される。確認データベースは、道路上の現実の自動車における車両占有に密接に関係するセットアップから取られる。最初は、トレーニングデータベースは3つのデータベースの最大のものである。時間及び供給源が許容するならば、100,000ベクトルから始まる独立データベースは、トレーニングデータベースとほぼ同様の大きさまで成長する。一方、確認データベースは、典型的には50,000ベクトルから開始される。しかし、ハードウェア配置は凍結されているので、確認データベースは成長を続け、幾つかの場合には、実際にはトレーニングデータベースより大きくなる。これは、プログラムの最後近傍で、車両が高速道路上で操作され、データが現実世界の状況で集積されるからである。現実世界の試験においてシステムの不備が発見された場合、これは確認データベースと同様に、トレーニング及び独立データベースの両方について付加的なデータの取り込みを導きうる。
【0039】
全てのトランスデューサから入手可能な全てのデータを用いてネットワークがトレインされると、ネットワークの精度は100%に極めて近くなると予測される。システムのトレーニングで使用された全てのトランスデューサを実際の車両モデルへの設置に使用するのは通常は現実的ではない。これは主に、コスト及び考慮すべき事項の複雑さによる。通常は、自動車製造者は、車両の製造における設置のために幾つのセンサーが許容されるかの考えを持っている。例えば、データは、20の異なるトランスデューサを用いて集積できるが、自動車製造者は最終的な選択を6つのトランスデューサに制限する。従って、次の工程は、例えば再考のシステム精度を達成するための6つのセンサーの最良の組み合わせを決定するためにセンサーを徐々に削除することである。理想的には、一連のネットワークは、20の利用可能なものからの6つのセンサーの全ての組み合わせを使用してトレインすることである。この作業は法外な長時間を要する。或る種の束縛が剪定工程を開始するために最初からシステム中に入れられる。例えば、電子装置を複雑にするため、同じシステムに存在する光学及び超音波センサーの両方を持つことは思い付かないであろう。実際に、自動車製造者は、最初は光学系が高価すぎるので、考慮しないことを決定した。従って、光学センサーの導入は、コストの関数として精度の低下を決定する方法を提供する。種々の束縛が、通常は最初のセンサー群のかなりの数を即座に除去することを可能にする。この除去及び残ったセンサーへのトレーニングは、結果的に精度の低下をもたらす。
【0040】
次の工程は、各センサーを一度に一個づつ除去して、何れのセンサーがシステム精度に最小の影響を与えるかを決定することである。次いで、この工程は、センサーの数が消費者に望まれる数まで減少されるまで繰り返される。この時点で、工程を逆転させて、以前の段階で除去されたセンサーを一個づつ追加刷る。例えば、最初の剪定工程で重要でないことが明らかになったセンサーが後に極めて重要になってくることもある。このようなセンサーは、種々の他のセンサーの存在により少量の情報を追加してもよい。しかし、種々の他のセンサーが更に他のセンサーより少ない情報しか生じない場合は、剪定工程の間に除去してもよい。従って、サイクルの初期に除去されたセンサーの再導入は有意な効果を持ち、システムを構成するセンサーの採取的な選択を変化させる場合もある。
上記のシステムを構成するセンサーの数の低減方法は、異なる状況で適用可能な種々の方法の一つでしかない。幾つかの場合、モンテカルロ法又は他の統計的方法が保証されるが、他の場合では、実験的方法の設計が最も成功することが実証された。多くの場合、この操作をコントロールする操作者は熟練し、どのセンサーの組が最も良好な結果を生ずるかを直感的に知っている。工程の最中に、異なるコンピュータで複数のケースを実行させることは異常なことではない。また、この工程の間に、精度のコストのデータベースが形成される。自動車製造者は、例えば、最終システムで合計6つのトランスデューサを持つことを望むが、1又は複数のセンサーの追加がシステムの精度をかなり向上させるという事実を考慮して、製造者は決心を変えうる。同様に、選択されるセンサーの初期数は6であるが、分析により4つのセンサーが6つと有意に同様の精度を与えることが示されたので、他の2つを除去してコスト削減してもよい。
【0041】
選定過程を行う間に、車両は種々の路上試験を受け、消費者にプレゼンテーションされる。路上試験は、基本的なトレーニングが行われるところでない様々な場所での走行である。予想外の環境的要因がシステムの性能に影響することが見出され、従って、これらの試験は重要な情報を提供する。従って、試験車両に設置されるシステムは、記録システム誤差の許容量を持つべきである。この記録は、誤差を生じうる車両セットアップの写真並びに車両上の全てのセンサーの出力を含む。このデータは、後に分析され、トレーニング、独立又は確認の何れのセットアップが修正を必要とするか、及び/又は何れのセンサー又はセンサーの位置が修正を必要とするかを決定する。
センサーの最終セットが選択されれば、車両は高速道路上での現実世界の試験及び消費者展示をされる。任意の特徴が再度記録される。しかし、この場合、システムのセンサーの総数がセンサーの初期セットよりかなり減少しているので、或る程度の誤差が予測される。これらの誤差が予測される場合、消費者に注意深く概観され、消費者がシステム誤差モードを認識し、これらの誤差モードで許容されるシステムを調製する。
【0042】
記述したシステムに限って言えば、単一のニューラルネットワークの使用に基づいている。複数のニューラルネットワーク及び他の認識システムの使用が必要であることが多い。例えば、車両シートの占有状態を決定するために、実際に2つの要件が存在する。第1の要件は、何がシートを占有しているかを確認することであり、第2の要件は、目的物の位置を確認することである。一般的に、車両シートを、例えば前向きの人間又は占有又は非占有の後ろ向きのチャイルドシートを特定するために多くの時間、典型的には数秒間がかかる。一方、自動車のドライバーが事故を回避しようとし、パニック状態でブレーキを踏む場合、ベルトを締めていない占有者の位置は即座に変化し、彼又は彼女はエアバッグの方向に移動する。よって、占有者の位置を決定する問題は時間に臨界的である。典型的には、そのような状況での占有者の位置は、20ミリ秒未満で決定しなければならない。システムが、前向きの人間がシートに居ることを決定すると同時に、その前向きの人間が何処にいるかを決定しなければならないという理由はない。システムは前向きの人間が存在することを知っているので、全ての材料は占有者の位置の決定に使用できる。よって、この状況において、二重レベル又はモジュラーニューラルネットワークが遊離に使用できる。第1のレベルが車両シートの占有者を決定し、第2のレベルが占有者の位置を決定する。幾つかの希なケースでは、平行して用いられる複数のニューラルネットワークが幾分の利点を提供することが示された。これは、以下でより詳細に議論する。
【0043】
パターン認識システムに供給されるデータは典型的に、通常はトランスデューサに捕捉されデジタル化されたデータの未加工のベクトルではない。典型的には、データのかなりの前処理を実施して、ニューラルネットワークに供給されるデータから重要な情報を抽出する。これは、光学系において真実であり、得られたデータは、全てがニューラルネットワークに使用される場合は、極めて高価なプロセッサを必要とする。データ前処理技術はここに詳細には述べない。しかし、前処理技術は多くの方法でニューラルネットワークに影響する。例えば、車両シートを占有しているものを決定するのに使用される前処理は、典型的には占有者の位置を決定するのに使用される前処理とは異なる。幾つかの特定の前処理概念は、以下で詳細に議論される。
【0044】
パターン認識システムが前処理されたデータに適用されると、出力として1又は複数の判定が利用可能である。パターン認識システムからの出力は、通常は種々のトランスデューサの出力のスナップショットに基づく。よって、それは1つのエポック又は時間を代表する。そのような判定の精度は、パターン認識システムからの以前の判定も考慮した場合に通常は有意に改善される。占有者の特定に通常使用される最も単純な形態では、多くの判定の結果が平均化され、得られた平均判定が正しい判定として選択される。しかし、動的な位置のずれについては状況が全く異なる。占有者の位置は、特定のエポックにあることが知られ、彼の以前の位置は平均化できない。一方、現在の判定の精度を向上させるために使用される以前の位置の情報がある。例えば、新たな判定が占有者が6インチ移動したと言うが、以前の判定及び物理学からそれが起こりえないことが知られる場合は、以前の位置を外挿することにより現在の位置のよりよい見積もりがなされる。あるいは、例えば以前の10エポックからのデータについて、時間に対する占有者位置の曲線が最小自乗法などの種々の技術を用いてフィッティングできる。この同じタイプの分析は、最終判定ではなくベクトル自身にも適用でき。それによりデータをパターン認識システムに入れる前に訂正できる。
【0045】
ニューラルネットワークなどのパターン認識システムは、全体として不合理な判定をなすことがある。これは典型的には、パターン認識システムがそのトレーニングセットにある任意のベクトルに類似していないデータセット又はベクトルで表された場合に起こる。車両の種々の着席状態は制限されない。代表的なケースの無制限のセット全体から選択刷る努力がなされる。それにも関わらず、ニューラルネットワークに以前示されたものいがと有意に異なるケースが殆どである。従って、システムを車両に適合させる最終段階は、人間の知能を手段を追加することである。これは、ファジー理論と名付けられることがあり、結果的なシステムはニューラルファジーシステムと命名される場合がある。幾つかの場合では、これは観察者実験誤差の形態をとって規則を提示し、例えば、センサーAが他のセンサーと組み合わされて当該範囲の値を生じ、システムがパターン認識判定に優先し、それを人間の判定に置き換えるようにプログラムされる。
【0046】
この例は、R. Scorcioni, K. Ng, M. M. Trivedi, N. Lassiter: ”MoNif: A Modular Neuro−Fuzzy Controller for Race Car Navigation”: In Proceedings of the 1997 IEEE Symposium on Computional Intelligence and Robotics Applications, Monterey, CA, USA July 1997に見られ、自立的操作のために設計され、一方のケースではニューラルネットワークで、他方のケースではニューロファジーシステムでトレインされた自動車の場合が記載されている。慣れた道で操作された両車両に限れば、両車両とも満足のできる性能であった。しかし、不慣れな道では、ニューラルネットワーク車両は誤ったがファジー車両は成功裏に操作を続けた。当然ながら、ニューラルネットワーク車両が不慣れな道でトレーニングされれば、極めて良好に成功するであろう。それにも関わらず、ニューラルネットワークには重大な欠陥があり、それは殆どの場合、人間が道の状態に直面したときに乳等留ネットワークが何をするかという不確実性に関連する。
【0047】
従って、システムに人間の知能を付加する一態様は、システムが誤動作しやすいような状態を探し出すことである。残念ながら、現在の技術常識では、これは多大な試行錯誤を要する。一例は、ベクトルの或る一部がトレーニング中に経験した範囲を外れる場合、システムは特定の状態にデフォールトされる。1又は複数のエアバッグ又は他の占有者保護装置の展開を抑制する場合、この場合はパターン認識システムが不可能であることを示しても、エアバッグを展開するのが可能である。
以上の医術は以下の図面に記載するシステムに適用可能であり、上記の説明と以下のシステムの関係を下記に説明する。しかし、図面に示したシステムは、上記の方法又は装置の適用性を制限するものではないと理解される。
【0048】
同じ参照番号が同一の又は類似の部材を示す添付図を参照すると、図1は、本発明に従って開発された着座状態検出システムを有する調節装置が適用されうる助手席シート1を示している。シート1は水平方向に位置する底部シート部2と垂直方向を向いた背面部3を有する。シート部2には、シートを占有する対象体があればその重さを測定する重量測定手段、すなわち一又は複数の重量センサー6及び7が設けられている。着座部2と背面部3(シートバックとも呼ばれる)の間の連結部にはリクライニング角度検出センサー9が設けられ、該センサーは着座部2に対する背面部3の傾斜角度を検出する。シート部2にはシートトラック位置検出センサー10が設けられている。シートトラック位置検出センサー10は、二点鎖線で示された背面基準位置から移動したシート1の移動量を検出する役割を果たす。シートバック3には、心拍センサー31と運動センサー33が埋め込まれている。車両の天井には容量センサー32が付設されている。シート1は自動車の運転席シート、前部助手席シート又は任意の他のシート並びに輸送車両の他のシートあるいは非輸送分野のシートであってもよい。
運動センサー33は車両の助手席における相対移動を検出するディスクリートセンサーとできる。そのようなセンサーは超音波に基づくものであることが多く、短時間の間に生じる超音波パターンの変化を測定できる。あるいは、過去の位置ベクトルからある位置ベクトルを減じて差分位置ベクトルを得ることにより、運動を検出することができる。本明細書においては、運動センサーは、ベクトル差に基づく特別なベクトルの創造に対する運動を検出するように設計された任意の特定の装置を意味するものとして使用される。
【0049】
センサー6及び7のような重量測定手段はシートに取り付けられており、例えばシートに作用する重量を測定するために、シート部2の中又は下あるいはシート構造体に装備することができる。重量は、シートに着座する者が不在のときはゼロとできる。センサー6及び7は、例えばシート部2のエアーバッグ又は袋体5によって、重複する目的で又はシートの異なった部分にかかる重量を測定する複数の異なったセンサーを表しうる。袋体5は一又は複数の区画を有しうる。このようなセンサーはシート部2又はシートバック3上の力又は圧力を測定する歪み、力又は圧力センサー、7又は他の適当な位置のようなシート構造部材上に設けられた歪みゲージを使用するようなシート1の全体又はシート表面の移動を測定する移動測定センサー、あるいは圧力センサーが重量の測定器として使用されうる圧力に移動を変換するシステムの形態を取ることができる。
超音波又は光学センサーシステム12が車両の前方ピラー(フロントピラー)の上部に取り付けられ、同様なセンサーシステム11が中間ピラー(センターピラー)の上部に取り付けられている。トランスデューサ11及び12の出力は、超音波センサー駆動回路18からのタイミング信号と同期して切り替えられるマルチプレックス回路19を通して帯域通過フィルタ20に入力され、ついで増幅器21によって増幅される。帯域通過フィルタ20は出力信号から低周波数波成分を除去し、またノイズの幾らかを除去する。エンベロープ波信号がアナログ/デジタル変換器(ADC)22に入力され測定データとしてデジタル変換される。測定データは処理装置23に入力され、該処理装置はタイミング信号により制御され、タイミング信号はついでセンサー駆動回路18から出力される。
【0050】
測定データの各々は正規化回路24に入力され、正規化される。正規化された測定データは波データとしてニューラルネットワークに入力される。
重量センサー6及び7の出力は重量センサー6及び7に連結された増幅器26により増幅され、増幅された出力はアナログ/デジタル変換器に入力され、ついで処理手段のニューラルネットワーク25に向けられる。
リクライニング角度検出センサー9とシートトラック位置検出センサー10は適当な電子回路に接続されている。例えば、定電流が定電流回路からリクライニング角度検出センサー9に供給することができ、リクライニング角度検出センサー9が背面部3の傾斜に対する抵抗値の変化を特定の電圧に変換する。この出力電圧は角度データとして、すなわち背面部3とシート部2の間の角度を表すデータとしてアナログ/デジタル変換器28に入力される。同様に、定電流が定電流回路からシートトラック位置検出センサー10に供給することができ、シートトラック位置検出センサー10がシート部2のトラック位置に基づく抵抗値の変化を特定の電圧に変換する。この出力電圧はシートトラックデータとしてアナログ/デジタル変換器29に入力される。よって、リクライニング角度検出センサー9とシートトラック位置検出センサー10の出力はアナログ/デジタル変換器(ADC)28及び29にぞれぞれ入力される。ADC28、29からの各デジタルデータ値はニューラルネットワーク25に入力される。このシステムと同様なシステムの更に詳細な説明は本出願人名義の上述の特許及び特許出願に見出すことができ、これら文献の全てを出典明示によりここに取り込む。上述したシステムは車両のシートの占有状態を検出するために本発明の教唆を使用して設計することができる多くのシステムの一例である。
【0051】
ニューラルネットワーク25は、増幅器25と正規化回路24に関連するADC28及び29に直接接続されている。このように、システムのセンサーの各々からの情報(データの流れ)はニューラルネットワーク25まで直接通過させられて処理される。センサーからのデータの流れはニューラルネットワーク25の前で組み合わされないで、ニューラルネットワークは別個のデータの流れ(例えば各入力ノードのデータの少なくとも一部分)を受け取り、それを処理してシートの現在の占有状態を示す出力を提供するように設計されている。よって、ニューラルネットワーク25は上述し以下に検討する形で学習することにより導かれたアルゴリズムを含むか取り込む。シートの現在の占有状態がひとたび決定されると、シートの現在の占有状態を考慮して例えばエアーバッグシステムのような車両部品又はシステムを制御することが可能である。
【0052】
自動車の助手席の断面が図2において全体に100が付されて示されている。図示しないハンドルの後ろのシート102に車両の運転手101が座っており、成人の乗客103が助手席のシート104に座っている。ここでトランスデューサとも呼ばれる二つの送信器及び受信器装置110及び111が助手席100に位置させられており、一方のトランスデューサ110が車内灯に隣接又は近接する天井に配設され、他方のトランスデューサ111が車両のダッシュボード又はインストルメンタルパネルの上部中央に配設されている。これらのトランスデューサの配置に至る方法論は以下に詳細に説明するように本発明の中心をなす。この状況下で、本発明に従って開発されたシステムは、占有者がシート104に座っていることを確実に検出し、車両が衝突する事態になったときにはエアーバッグの展開を可能にする。トランスデューサ110、111は自動車の助手席の占有者の頭、肩及び後方に向いたチャイルドシート容積の分割軸に平行にその分割軸を向けて配置され、この特定の位置決めによって異なった形状を区別できる。超音波トランスデューサ110、111に加えて、重量測定センサー210、211、212、214及び215もまた存在する。これらの重量センサーは、同時係属米国特許出願第08/920822号により詳細に記載されている、ここに例証したような、車両シート支持構造体に付設された歪み測定トランスデューサを含む様々な技術のものである。当然に、シートクッションの変形又はその圧力を測定するシステムを含む他の重量システムを使用することもできる。ここに記載した重量センサーは一般的な部類の重量センサーの例示を意味するものであって占有者の重量を測定する方法の完全なリストではない。
【0053】
図3では、図2に示した成人の乗員に子供121を含む前方に向いたチャイルドシート120が置き換わっている。この場合、事故のときにエアーバッグが作動不能にならないようにすることが通常必要とされる。しかし、図4に示されるように、後方を向く位置に同じチャイルドシートが配置されている場合には、エアーバッグは、事故時のエアーバッグの展開が子供をひどく傷つけたり死亡させたりさえするので、通常は作動不能になっていることが必要である。更に、図5に示されているように、乳児キャリアー130の乳児131が助手席の後方に向く位置に位置させられている場合は、上述した理由からエアーバッグは作動不能にされなければならない。エアーバッグの展開を作動不能にする代わりに、例えばエアーバッグの展開の力を低減するために、展開を制御して子供に対する保護をすることもできる。助手席の乗員に対して助手席エアーバッグを作用不能にするか作用可能にするかは特定の応用に対して調整されるべきことに留意されなければならない。例えば、前方を向くチャイルドシートを有する実施例では、実際にはエアーバッグを作用不能にすることが望ましく、他の場合には電力を切った(depowered)エアーバッグを展開することが望ましい。助手席の対象及びその位置の関数としていつエアーバッグを作動不能にし、電力を切り、又は作動可能にするかの選択は、センサーシステムのプログラム又は学習段階においてなされ、大抵の場合、上述の基準が適用できる、すなわち、前方を向いているチャイルドシートと正しい着座位置の成人に対してエアーバッグの展開を可能にし、後ろを向くチャイルドシート及び乳児のために及び位置がずれているかエアーバッグモジュールに接近しているあらゆる占有者のためにエアーバッグの展開をできないようにする。しかし、本発明に従って開発されたセンサーシステムは他の基準に従ってプログラムされてもよい。
【0054】
他の技術を使用する幾つかのシステムが、上で示した4種のケースを区別するために考案されているが、何れも満足できる精度又は信頼性を持つ区別化は可能としなかった。これらのシステムの幾つかは、チャイルドシートがシート上に適切に位置せしめられベルト付けされる限り、作動するように思われる。シート内に配されたセンサーにより電磁気学的に検出されるチャイルドシートに装置が配置される例えばいわゆる「タグシステム」は、それ自体では信頼性があるものではなかったが、全体のシステムに情報を追加することができる。単独で使用される場合、それらは、チャイルドシートがシートベルトによって拘束されている限りは良好に機能するが、そうではない場合には、それらは高い失敗率を示す。米国の人口の中でシートベルトの着用は現在のところ約60%にすぎないので、チャイルドシートがシートに適切にベルト止めされない場合が多く、よって子供が事故時に怪我をしたり死亡する可能性は非常に高い。
この発明の方法はこの問題を解消するために考案された。この方法を理解するためには、図6において軸線ABによって連結されている二つの超音波送信器110と受信器111(トランスデューサ)を考える。各送信器は、送信器にその原点を持つ、画角と呼ばれるテーパ角度に主に限定される信号を発する。簡単のために、ある場合には別個の装置が各々の機能のために使用されるが、送信器と受信器が同じ装置であると仮定する。トランスデューサが突発波を送信して、超音波発信を助手席に行い、ついで助手席のある対象体から反射又は変形波を受信すると、トランスデューサからの対象体の距離を波の発信と反射又は変更波の受信の間の時間遅れによって測定することができる。
【0055】
単一のトランスデューサを見ていると、信号を反射し又は変更している対象体の方向を決定することはできないが、その対象体がトランスデューサからどれくらい離れているかのみを知ることができ、つまり、単一のトランスデューサは距離測定を可能にするが方向の測定を可能にしない。換言すれば、対象体はトランスデューサにその原点を持ち距離に等しい半径を持つ三次元の球状セグメントの表面上の点にありうる。図6の110と111のような二つのトランスデューサを考えると、両方のトランスデューサが同じ対象体から反射を受けるが、これはトランスデューサの適切な配置によって容易になり、反射のタイミングは各トランスデューサまでの対象体からの距離に依存する。二つのトランスデューサが独立して作用することをこの解析の目的に対して仮定すると、つまり、それ自体が伝送される音波の反射のみを聞き取るとすると、各トランスデューサは反射対象体までの距離を感知するがその方向はしない。トランスデューサが画テーパ角内の全ての方向に超音波を発すると仮定すると、各トランスデューサは、対象体がトランスデューサから各既知の距離の球面A、B上に位置していることを感知する、つまり各トランスデューサは、対象体が他のトランスデューサと同じ対象体の間が同じ距離かそうでなないトランスデューサからの特定の距離であることを感知する。二つのトランスデューサがあるので、反射対象体の距離はトランスデューサの各々に対して知られており、対象体の実際の位置は二つの球面A及びBの交差部である円上にある。この円は図6でCと標識する。円Cに沿った各点において、トランスデューサ110までの距離は同じで、トランスデューサ111までの距離は同じである。これは、もちろん、理想的な一次元の対象体に対してのみ厳密には正しい。
【0056】
多くの場合、その位置が知られている特定の円上に対象体がまさにあるときに円の位置を見いだすことができるので、対象体が特定の円上に存在するという単なる知識だけで十分である。つまり、対象の領域を通過する円等が対象体が生じない容積を通過する。よって、この特定の位置における円の単なる算定は、対象体がその円に沿って存在することを示すが、エアーバッグシステムのような車両の他のシステムを制御し又はそれに影響を及ぼすために使用されうる助手席の対象体に関する価値ある情報を提供する。これは、もちろん、二つのトランスデューサへの反射が実際は同じ対象体からのものであるという仮定に基づいている。他の対象体がシステムを混乱させうる反射を引き起こさないようにトランスデューサを配置するように注意が払われなければならない。
図7は例えばシートがチャイルドシートCではなく人によって、又は前方を向くチャイルドシートによって占有されているときに通常占有される容積及び後ろを向くチャイルドシートにより通常占有される容積をそれぞれ表す対象の二つの円D及びEを示している。よって、システムによって、(つまり、各トランスデューサからの距離の測定値を受け取り、トランスデューサから対象体までの距離を表す球面の交差部から円をつくり出す適切な処理手段によって)生成される円が成人助手によってのみ占有される位置にある場合、エアーバッグは、事故時のその展開が望まれるので、作動不能とはされない。他方、円が後ろを向くチャイルドシートにのみ占有される位置にある場合、エアーバッグは作動不能とされる。
【0057】
上記の議論は、対象体によって占有される容積又は一以上の対象体の表面からの反射が関与するという事実を考慮していない点でもちろん単純化されている。実際には、トランスデューサBは占有者の頭の後ろを取り上げ、トランスデューサAは前部を取り上げる可能性が高い。これは、技術者が解析するデータを調べる状況を一層難しくしている。パターン認識技術がこれらの状況から情報を抽出することができ、これらの技術の正しい適用を通によって、特定の車両に対してシステムの一部としてインストールされると、システムが例えば前方を向くチャイルドシートと後ろを向くチャイルドシート、又は適切な位置にいるか又は外れている前方を向く人を精確かつ確実に識別するアルゴリズムを開発することができることが見いだされている。
上記の議論から、(i)前方を向くチャイルドシートとエアーバッグの展開が望まれる前方に正しく位置した占有者と(ii)後方を向くチャイルドシートとエアーバッグの展開が望まれない場所がずれた占有者を区別する一義的な情報を提供するトランスデューサの位置決め方法が開示される。実際には、この理論を実行するために使用されるアルゴリズムは球面又は球の相互作用の円を直接計算しない。代わりに、パターン認識システムを用いてエアーバッグが展開されるべきではないものからエアーバッグの展開が望まれる場合を区別する。しかし、パターン認識システムがその機能を精確に遂行するには、システムに提供されるパターンが要求される情報を有していなければならない。つまり、様々なトランスデューサに対する助手席の占有対象からの反射音波のパターンが、エアーバッグの展開が望まれる場合と展開が望まれない場合とで一義的に異なっていなければならない。上述され以下に更に詳細に説明される理論は、反射音波のパターンがエアーバッグの展開が望まれる場合と展開が望まれない場合とで容易に区別できるように車両助手席にトランスデューサを如何にして位置決めするかを教示する。これまで示した場合では、ある実施化では、二つだけのトランスデューサが、車両構造が、円D(エアーバッグ作動可能)及びE(エアーバッグ作動不能)が条件の確実な特定が生じる臨界領域にある場合を除いてトランスデューサのフィールドコーンの外に位置するように二つのトランスデューサを配置することができる場合、所望のパターン識別を生じることが示された。よって、トランスデューサの目標及び画角が特定の車両にシステムを適合化させるのに重要な因子である。
【0058】
システムにおいて二つのトランスデューサのみを使用することは、トランスデューサの一方又は両方が例えば新聞などで遮られることによって作動不能になりうるので、典型的には許容できない。よって、第3のトランスデューサ112を付加することが望ましく、第8図に示すように、第3のトランスデューサに対して第3の球面集合を提供する。トランスデューサ112はフロントピラーの助手席側(システムが車両の助手席側で操作するように設計されている場合は好ましい位置である)に位置せしめられる。しかして3つの球面が二つの点のみで交差し、実際、目標角及び画角が適切に選択される場合には通常一つの点で交差する。もう一度言うが、この議論は点の対象体に対してのみ厳密には正しい。実際の対象体に対しては、反射が対象体の異なった表面から生じ、これが通常は対象体から同様の距離にある。よって、第3のトランスデューサの追加はシステムの信頼性を大幅に改善する。最後に、図9に示されるように、第4のトランスデューサ113の追加により、更に大きな精度と信頼性が達成される。トランスデューサ113は助手席側のドアに近い車両の天井に位置させられる。図9では、トランスデューサC及びDとトランスデューサA及びBを結ぶ線が実質的に平行であり、非対称、よって対象体の回転の精確な検出を可能にする。よって、例えば、乳児シートが図5に示されるような角度で配置される場合、この条件は、エアーバッグの展開を作動不能にするように決定するときに決定され、考慮されうる。
【0059】
上記の議論は、トランスデューサを位置決めし、二つの標的容積、つまりエアーバッグに隣接するものと車両シートの上部に隣接するものが占有されているかどうかを決定するシステムを設計することに中心を置いた。上記の特許にはエアーバッグモジュール上に又はそれに隣接して取り付けたセンサーと車両の高い位置に取り付けたセンサーを用いて車両シートの近傍の空間を監視する他のシステムも記載されている。このようなシステムは、独立した装置としてセンサーを用いており、対象体が位置させられている場所を決定するために二つのセンサーの組み合わせを使用してはいない。実際、そのようなセンサーの位置は、例えば新聞で何れか又は両方を隠すことが容易なように通常は下手に選択される。更に、システムの深刻な劣化を引き起こさないで一又は複数が遮られるように二つ以上のトランスデューサを使用するシステムは、本発明の譲受人名義の特許及び特許出願を除いて、開示されていない。再び言うが、ここの例は怪我を防止するのが必要なときにエアーバッグの展開を押さえる目的のものである。開示されたセンサーシステムは本発明と同じ譲受人の名義の上記特許出願に開示されているような多くの他の目的に対して使用することができる。これらの他の用途へのセンサーの使用性は他の参照される特許に開示されたシステムには一般に欠落している。
【0060】
二つのトランスデューサが使用される図2ないし7の条件をもう一度検討すると、図7の曲線Eと曲線Fの領域に位置している対象体の反射時間を示すプロットを描くことができる。このプロットは図10に示されており、cが、様々な異なった位置にシートが配置された様々な試験から後ろを向くチャイルドシートからの反射を表し、同様にsとhが前方を向く人の様々な占有者のそれぞれの肩と頭部を表す。実際の実験からのこれらの結果では、身体の厚みの影響が存在し、また結果はキーとなる容積の分離の基本原理が有効であることをなお示している。異なった対象体のクラスを収容する通路間の分離領域が存在することに留意されたい。上で参照した特許出願において記載されているニューラルネットワークに関連して使用されるのはこの事実であり、これが、前方を向く人から後ろを向くチャイルドシートを精確に識別するシステムの設計を可能にする。様々な対象体からの反射の間に顕著なオーバーラップがあり、よって反射された音波のパターンに基づいて分離がなされる。ここに記載された技術を用いて、後ろを向くチャイルドシートデータの全てが既知の通路内に入る、臨界的な表面のこの分離領域を生じるようにトランスデューサを注意深く配置することにより、ニューラルネットワークのために残るタスクが大幅に単純化され、特定の精度が大幅に改善される結果となる。
【0061】
三種の一般的な部類のチャイルドシートと独特な幾つかのモデルが存在する。最初に、約20ポンドまでの体重の占有者に対してである図5に示したような乳児のみのシートがある。これは、後ろを向く位置にのみ配置されるように設計されている。図2及び3に示されている第2のものは約20から約30ポンドの子供用であり、前方と後方を向く両方の位置において使用することができ、第3のものは前方を向く位置のみの使用のためのもので、約40ポンドを越える体重の子供のためのものである。全てのこれらのシート並びに独特なモデルはシステムを車両に適合させるための本発明による試験設備において使用される。各チャイルドシートに対して、車両内のそのシートの実質的にあらゆる可能な位置を表す数百の独特な向きが存在する。試験は、例えば22度傾斜され、17度回転され、十分にシートを上に戻し、十分にシートを後ろにし、ウィンドウを開放し、シートのフロントに配され、並びにこれらのパラメータの全ての変動に対して実行される。本発明の教唆を実施する場合、様々なアクセサリー、例えば衣服、玩具、瓶、毛布等々をチャイルドシートに加えて、多数の場合がまた実行される。
同様に、例えばサイズ、衣服、地図又は新聞を読むような活動、ラジオを調節するために前傾するなどを含む広範な変動要因が占有者に使用される。また、占有者が足をダッシュボードに置いたり、様々な一般的ではない位置をとるような場合が含まれる。上記の姿勢の全てが述べられていない多くの他のものと共に考慮されると、パターン認識システムを学習するのに使用される姿勢の全数は500000を越えうる。目標は、実際の使用時に生じる全ての占有状態を表すことを姿勢学習セットに含めることである。システムは学習セットのものに類似した場合に対して精確な決定をするのに非常に精度がよいので、ケースが全て別で他のケースのコピーではないと仮定すると、トータルシステムの精度は、学習セットのサイズが増加すると増加する。
【0062】
占有状態における全ての変動に加えて、データ収集の間、環境の影響を考慮することは重要である。音波は空気中の密度変化により有意に回折されうるので、温度勾配又は温度の不安定性が特に重要である。学習における温度勾配又は不安定性の使用の二つの側面がある。先ず、熱不安定性が存在し、よって温度に不安定なデータが存在するという事実はデータベースの一部であるべきである。この場合に対しては、温度不安定で収集されたかなり少量のデータが使用される。温度不安定性の使用の更に重要な点は、データにそれが変動性を付加するという事実から生じる。よって、かなり多くのデータが温度を不安定にして得られ、実際、ある場合には、殆ど全部のデータベースが、ニューラルネットワークがデータを記憶しないが代わりにデータから一般化するようにデータに変動性をもたらすために、時間的に変化する温度勾配で取られる。これは、ヒーター操作を伴う寒い車両及びエアコン操作を伴う暑い車両においてデータを取ることによって達成される。また更なるデータは日光の負荷によって引き起こされる安定な温度勾配を模倣するように閉めた車両においてヒートランプを用いて取られる。
【0063】
500000の車両姿勢に対してデータを集めることは膨大なタスクではない。訓練を受けた技術のある乗員は典型的には一時間に2000の姿勢又はベクターを越えるデータを収集することができる。データは典型的には50から100ミリ秒毎に収集される。この間、占有者は、所望の数の着座状態の例が得られるまで、連続して移動し、側方から側方に、前後に移動し、頭を捻り、新聞と本を読み、手、腕、足及び脚部を動かすことを含み、車両で連続的に変わる位置と姿勢を取る。ある場合には、この方法は特定の領域に占有者の運動を制限することにより実施される。ある場合には、例えば、占有者は、安全ゾーン、外れゾーン、又は中間のグレーゾーンでありうる特定の領域にいながら、これらの異なった着座状態をとるように学習がなされる。このようにして、エアーバッグ作動不能、脱電力エアーバッグ作動可能又はフルパワーエアーバッグ作動可能状態を表すデータを収集する。換言すれば、占有者の頭の後ろ及び/又は肩の実際の位置がストリングポット、高周波超音波トランスデューサを使用して又は光学的に追跡される。このようにして、占有者の位置を測定することができ、これがエアーバッグを作動させない場合か作動させる場合かについての決定を後でなすことができる。占有者を連続的に監視することにより、ある着座状態と他の状態の占有者の比較を可能にするデータを収集することができるという更なる利点が得られる。これは、例えば、衝突前のパニック時のブレーキ作動状態の間、 占有者が外れゾーンにいつ入るかを予想するために望ましいので、一連の過去の位置に基づいて占有者の未来の位置を見積もる試みにおいて特に価値がある。
【0064】
製造される全ての車両で学習を行うことは必要ではなくむしろ各プラットフォームカーで学習を行うことが必要であることに留意することが重要である。プラットフォームは同じ車両構造に基づいて製造される一群の車両モデルの自動車メーカーの命名である。
ニューラルネットワークに関する文献を概観すると、そのような大きな学習セットを使用することはニューラルネットワーク分野ではユニークであるという結論に至る。ニューラルネットワークの規則は各ネットワーク重量に対して少なくとも3通りの学習ケースがなければならないことである。よって、例えば、ニューラルネットワークが156の入力ノード、10の第一の隠れレイヤーノード、5の第二の隠れレイヤーノード及び一つの出力ノードを有する場合、これは全体で1622の重量になる。一般的な理論では、5000の学習例で十分である。従って、100倍の多くのケースによってより高い精度が達成されるであろうことは全く予想できない。よって、学習データベースのサイズが何万のケースまでにさえ増加するにつれてシステムの精度が大幅に改善することは自明ではなく、ニューラルネットワークの文献から推論することはできない。また、試験の数又はデータベースのサイズを増加させるとシステムの精度にそのような顕著な効果が生じることは、超音波トランスデューサを使用して得られたベクトルのプロットを見ても自明ではない。ベクトルの各々は数カ所の有意なピークと谷部を持つかなりのコースプロットである。システムの空間分解能は典型的には約3から4インチであるので、そのような大きなデータベースが有意な精度の改善を達成するために必要であることは全く驚くべきことである。
【0065】
自動車へ超音波システムを適用する過程をここで記載する。ステップのより詳細なリストは付録2に紹介した。ここでは超音波システムの中心的な部分を記載する。また負荷および光または他の電磁波システムを使用するときも同様のステップを適用する。以下の記載は実施例でありこれに限定されるものではない。
1.自動車に適合するようにトランスデューサ、ホーンおよびグリルを選択する。この段階で、通常は波が助手席へ伝搬するようにフルホーンが用いられる。トランスデューサの美的なマッチングを適合させるために、自動車表面へは使用されない。このとき、必要な伝搬領域は、直接自動車内で測定するか、CADによる図面から推定する。
2.音波トランスデューサ領域のポーラプロットを作成する。トランスデューサ、ホーンの候補、およびグリルは組み立てられ、領域角が設計通りであることを確認するためにテストする。ホーン内のトランスデューサやグリルの適合は頻繁に要求される。超音波システムへ適切に設計されたグリルは、光システムのレンズと同様に働く。
3.波の伝搬領域が、自動車の助手席の必要な体積を占めることを、およびマルチパス効果によって近隣平面上での衝突がないことえを検査する。もし必要ならば、ホーンとグリルを再設計する。
4.自動車へトランスデューサを搭載する。
5.自動車内のトランスデューサ領域をマップし、マルチパス効果と伝搬範囲を検査する。
6.トランスデューサの照準を合わせ、もし必要ならば領域の再マップを行う。
7.デイリーキャリブレーション固定器を搭載する。
8.50000から100,000ベクトルを取得する。
9.もしクロストークが存在するならばいくつかの初期データを削除し、必要とされる助手席の空間内のデータを保持するいくつかの最終点によって考慮している空間に対するベクトルを調節する。
10.ベクトルの正規化。
11.自動車に搭載するアルゴリズムを作成するために。ソフトウエアによって実現されたニューラルネットワークを実行する。
12.アルゴリズムの正確さを検査。もし十分正確でなければさらにデータを集め必要ならば繰り返す。もし、なおも正確でなければ穴を埋めるためにトランスデューサを付加する。
【0066】
13.十分正確になったとき、500,000の学習ベクトル収集する手続きをする。
占有率(付録1、2および図12−19参照):
占有サイズ、位置(区域)、衣服、その他
チャイルドシートのタイプ、サイズ、位置、その他
空席
車両構成:
シート位置
窓位置
バイザーおよびアームレスト位置
隣接しているシートはリアシート内の他の占有物
温度
温度勾配−安定
温度の不均一−ヒーターおよびエアーコンディショナー
乱気流−窓の開放、その他による高速走行
14.上述の他の組み合わせを用いて、100,000の独立なベクトルデータを収集する。
15.許容基準を提示するための50,000ベクトルの「実世界データ」の収集、より詳細には、実世界での実際のシートの状態の可能性を提示する。
16.学習ベクトルと独立データベクトルを用いてトレインネットワークと生成アルゴリズム。
17.実世界データを用いてアルゴリズムの検証。
18.自動車へアルゴリズムを搭載し、テストする。
19.システム内の最終的な欠陥(領域の誤り)を削除するためにポストプロセッシング方法論を決定する。
20.アルゴリズム内へポストポストプロセッシング法を実装する。
21.最終テスト。ステップ13までの工程の終了は、助手席の内装の表面に搭載されたフルホーンを持つトランスデューサの使用を含む。これは従来のステップ13か本ステップのどちらかを行う。これは、助手席の視覚的な表面を含めてトランスデューサホルダーの設計を含み、ゆえに、領域を制御するのに役立つ、適切に設計されたグリルをカバーでき、内装の美的品質を保つのに役立つ。これは、通常冗長な工程であり、顧客との相談を含んでいる。通常、13から20までのステップは、最終的なトランスデューサおよびホルダーの設計が選択された後の時点で、繰り返される。フルホーンをとる該初期データは最も良いシステムと比較して与えられる。美的なホーンやグリルがフルホーンに置き換えられたとき、能力の低下を起こす。2つのデータ収集サイクルを導入することによって、厳密な測定の精度は低下する。
22.製品として使用される自動車を出荷する。
23.続けて改良するために実世界検証データを付加的に収集する。
【0067】
トランスデューサ及びコントロール回路並びにニューラルネットワークについての更なる詳細は、上記の特許及び特許出願に与えられ、それらの全体をここに再現するように取り込むものとする。
最後に、システムは車両の生産の輸送において起こる製造及び取り付け許容誤差を代表する状態でトレーニングされ試験される。よって、例えば、システムは任意の方向に1インチまでの移動及び15度までの回転した位置に取り付けられたトランスデューサで試験される、泥及び他の変数で刺激される。車両に対するこの許容誤差は、相違するが炊事したモデル車両へのシステムの取り付けにも許容される。
【0068】
音速は、温度、湿度及び圧力で変化する。これは、トランスデューサ間の位置が知られていることによって補償でき、従って音速が測定できる。よって、車両セットアップ時、しばしばその後に、音速は図5のトランスデューサ110等のトランスデューサによって測定でき、他のトランスデューサによって受信される信号を送信する。それらを離間する距離が知られているので、音速が計算され、システムは自動的に音速の変動による変化を除去するように調節される。従って、システムは、温度、湿度又は圧力に関係なく同様に操作される。
上記の音速測定での問題は、車両内の対象物が一方のトランスデューサから他方への経路を遮断することである。これは当然にチェックされ、一方のトランスデューサからの信号が他方に到達しない場合には、修正がなされない。しかし、この問題は、経路が完全に遮断されずに僅かに遮断されることである。このことは超音波経路の延長をもたらし、温度変化の誤差を生じる。これは、更に1つのトランスデューサを使用して解決できる、
【0069】
温度を決定のための代替的方法は、温度で変動するトランスデューサのパラメータの幾つかを測定するトランスデューサ回路の使用である。多々追えば、超音波トランスデューサの自然周波数は周知の様相で温度に従って変化し、従ってトランスデューサの自然周波数を測定することにより温度を決定できる。
各トランスデューサから他のトランスデューサまでの距離が注意深く測定できる方法及び音速を決定する溜めに開発されたアルゴリズムは、本発明の教示の重要な部分を占める。これ以前には、音速は一のトランスデューサから他の知られたトランスデューサへの単一の伝達に基づいて計算されていた。これは、不正確なシステム設計及び場におけるシステム精度の低下をもたらす。
【0070】
システムの一部である電気的コントロールモジュールは、一般的にトランスデューサと同様な環境に配置されるので、温度を決定する他の方法が利用可能である。この方法はデバイスを使用し、その温度感度は知られていて、電気回路と同じボックス内に配置される。実際に、多くの場合、プリント回路基板上に存在する部材が監視され、温度の表示を与える。例えば、対数補償回路のダイオードは、温度に従って抵抗値が周知の様相で変化する特徴を持つ。
本発明の技術に従って開発されたシステムの他の重要な特徴は、車両の運動が新規な方法でシステムの精度向上に使用できるという合理化である。超音波は、鏡における光のように殆どの対象物で反射される。これは光に比べて超音波の長い波長による。その結果、或る種の反射が受信機を圧倒して利用可能な情報を減少させる。占有者及び/又は車両が運動中に読みを取り込み、その読みを幾つかの伝達/受信サイクルについて平均化した場合、占有者及び車両の運動は、角度方向的には僅かだが、反射パターンを変更させて鏡面効果を低下させるには十分な面の変化を生ずる。幾つかのサイクルの平均である全体の効果は、単一のサイクルより明瞭な反射対象物の画像を与える。
【0071】
占有者が通常の車両操作中に車両内に着席している場合、占有状態の決定は、長時間に渡る連続的な観察によってかなり改善される。これは、ニューラルネットワークへの挿入に先立つデータの平均化を伴うか、又はニューラルネットワークの判定を平均化してもよい。これは、工程の分類化相として知られる。分類化の間に、占有状態が決定される。車両は、前向きの人間、空席、後ろ向きのチャイルドシート、又は位置のずれた人間に占有されているか。典型的には、多数秒のデータが蓄積され分類化が決定される。
一方、ドライバーが差し迫った衝突を関知したとき、彼又は彼女は、典型的にはブレーキを強く踏み、衝突の前に車両の速度を低下させようとする。占有者がベルトを締めていない場合、彼又は彼女は、このパニック状態のブレーキ操作中にエアバッグの方向へ移動する。占有者の一を決定する目的のために、分類化のようにデータを平均化する十分な時間はない。それにも関わらず、以前のベクトルからのデータに情報があり、それは、例えば温度効果によって生じうる現在のベクトルにおける誤差を部分的に修正できる。一つの方法は、以前のトレーニングに基づいてニューラルネットワークを用いて占有者の一を決定することである。当然のことながら、車両に加速時計が存在し、加速度データをこの計算に利用できるならば、より高い精度の予測が可能となる。よって、現在のベクトルの誤差データの修正に使用できる以前のベクトルのデータにおける情報並びにこのデータから決定された占有者の位置が存在し、従って、分類化の平均化法に類似しすぎてはいない手法により、占有者の位置精度をより高い精度で知ることができる。
【0072】
超音波占有者位置センサーシステムのための超音波トランスデューサの配置に戻ると、超音波トランスデューサの配置に関する本発明のより新規な特徴として、本出願は、(1)標的容量の一軸監視への2つのセンサーの適用、(2)対象物位置を感知するための標的容量をスパンする2つのセンサーの配置方法、即ち、トランスデューサが感知される対象物に渡って検知軸に沿って取り付けられる、(3)識別対象物の特徴を分離する軸に平行する光学的標的識別のためのせんさーの配向方法、(4)後ろ向きチャイルドシート及び前向き人間検出のための人間検出の場合の頭部及び肩部及び支持面の決定方法を開示する。
【0073】
一組の監視が、電磁気センサーの使用のために入手可能である。そのような規則は、このようなセンサーが、典型的には、センサーに関連する側面及び垂直面、及びセンサーに対して垂直距離を測定することにおいてより正確であることを考慮に入れなければならない。これは、特に、CMOS及びCCDを基礎とする振動子の場合である。かなりの研究が、超音波振動子の解像度を改良するために進められている。より高い解像度の振動子を利用するためには、より近くともにデーターポイントが得られるべきである。これは、返送されたシグナルからエンベロープが抽出された後、サンプリング速度は、1秒あたり約1000サンプルから恐らく1秒あたり2000サンプル又はさらに高くへと増加しなければならない、ということ意味している。分析されることを必要とするデータ量の二倍又は三倍することで、車へ取り付けるシステムは、かなりの計算力を必要とする。これは、より高価な電子システムとなる。すべてのデータに同じような重要性があるのではない。通常の座席位置の乗員の位置は、かなりの正確性で知られる必要はないが、乗員がクラッシュ(衝突)前のブレーキ作動中に立ち入り禁止境界域へ動く場合、空間の正確性の必要性はさらに重要になる。幸いにも、神経ネットワークアルコリズムを生じるシステムは、神経ネットワークによって使用される各データポイントの相対的価値を、システムデザイナーへ示唆する能力を有する。従って、例えば、ベクター当たり500データポイントほどがトレーニング段階及び注意深い剪定後に収集され、神経ネットワークへ供給され、車へ備え付けられたシステムによって使用されるデータポイントの最終数は、例えば、150へ減じることができる。入力データを切り詰めるために神経ネットワークアルコリズム生成プログラムを使用するこの技術は、本発明の重要な教示である。この方法によって、高解像振動子の利点を、電子車に備え付けられた回路のコストを増やすことなく最適に使用することが可能である。また、一度神経ネットワークがデータポイントの間隔を決めると、例えば、はっきりとした安全ゾーン中の位置と比較して立ち入り禁止ゾーンの端においてより多くのデーだポイントを得るによって、これは微調整されることができる。最初の技術は、すべての500データポイントを収集することで行われ、例えば、車へ取り付けられたシステムの一方で、データのデジタル化間隔化は、必要とされるデータのみが得られるようにハードウェア又はソフトウェアによって決定できる。
【0074】
パニック又は衝突前の状況でのブレーキ作動中の乗員の位置を定めるための、上記に記載の技術は、モジュラー神経ネットワークの使用を包含する。この場合には1つの神経ネットワークは、車の占有状態を測定するために使われ、2番目の神経ネットワークは、車内の乗員の位置を定めるために使用された。複式神経ネットワークを使用するシステムを設計する方法は、本発明の主要な教示である。このアイデイアが一般化された時、複式神経ネットワーク構造の多数の潜在的な組み合わせが可能となる。これらの幾つかが、現在検討されている。
【0075】
複式神経ネットワークを使用する最も早い試みの一つは、別に訓練された異なったネットワークを組み合わせたが、一つのネットワークの正確性へ影響を与えるエラーは、その他のネットワークの正確性へ影響を与えるエラーには依存しないという理論の下の実質的に同じデータによった。例えば、4つの超音波振動子を含むシステムのためには、4つの振動子データの異なったサブセットを使用して4つの神経ネットワークのそれれぞれを訓練することができる。従って、振動子が任意にA、B、C及びDとラベルされた場合には、最初の神経ネットワークはA、B及びCからのデータで訓練されるであろう。2番目の神経ネットワークは、B、C、及びDなどのデータで訓練されるであろう。この技術は、データ中のエラーを除くよりはむしろ覆い隠すことを試みるものであるために、大きな成功をおさめていない。にもかかわらず、このようなシステムは、すべての4つの振動子からのデータを使用した単一のネットワークと比較して、幾つかの状況においてかろうじてより良く行われる。このようなシステムを使用する不利益は、計算時間はおよそ3つだけ増加する。これは、車へ取り付けられたシステムのコストへ顕著な影響を与える。
【0076】
上記に記載の平行神経ネットワーク構造の利点の幾つかを得る代替方法は、隠された層の一つ以上の節点のすべてが入力節点のすべてと連結していないが、単一神経ネットワークを形成することである。あるいは、2番目の隠された層が選択された場合、先の隠された層の節点のすべては、後の層のすべての節点と連結していない。隠された層の節点の代替グループは、次に異なった出力節点へ与えられ、出力節点の結果は、単一決定への神経ネットワーク訓練プロセス又は投票過程のどちらかを通して組み合わされる。この後半のアプローチは、実質的に計算の複雑さを減じる一方で、平行神経ネットワークの利点の殆どを保持する。
【0077】
平行のネットワークの基本的問題は、それらが、神経ネットワーク構造そのもの又は使用されるデータの質を改良するよりも冗長性によって信頼性と正確性を達成することに焦点をあたたいることである。それらは、また、最終車の取り付けられたシステムのコストを増加する。あるいは、モジュラー神経ネットワークは、仕事を分割することでシステムの正確性を改良した。例えば、特定の意味において木のタイプ及び動物のタイプを定めるためにシステムが設計されるならば、モジュラーアプローチは、興味の物が動物なのか木なのかを最初に決定し、そして木のタイプ及び動物のタイプを決定するために分離神経ネットワークを使用する。ヒトが木を見た場合、彼は彼自身がトラ又はサルであると自答しているのではない。一度分類が決定されてからは、モジュラー神経ネットワークシステムは効果的であ留。席は前方を向くヒトによって占有されている。例えば、あの目的物の位置は、さらに正確に、そして増大した計算源を要求せずに決定できる。
【0078】
モジュラー神経ネットワークが証明された価値を有する、その他の例は「特別」のケースから「通常」を分離する手段を提供する。幾つかのケースにおいて、神経ネットワークによって容易に同定される「普通」と表されるケースへ殆どのデータがあてはまることが見出された。ケースのバランスは、神経ネットワークをかなり難しいものにしたが、それらが普通のケースと分離され、分離して扱われることを可能にする特別なケースの同定可能な特徴がある。曖昧なロジック、普通のケースの平均クラスのベクターを使用した統計的ふるい分け、ベクター標準的逸脱、及び曖昧なロジックネットワークがあるクラスに属するベクターの可能性を定めるために使用される場合の許容限界値を含むこの分離を行うために、神経ネットワークに加えて、種々のタイプのヒトの知性が使用できる。可能性が限界許容値より低い場合、標準的神経ネットワークが使用され、高い場合は特別な物が使用される。
【0079】
平均−分散関連、曖昧ロジック、確率論的及び遺伝的アルゴリズムネットワーク、及びその組み合わせ、例えば神経−曖昧システムが他の技術として検討されている。特定の車へ適用するシステムのデザインの過程では、上記に言及されたものを含めて、多くの異なる神経ネットワーク構造が考慮された。構造の特定の選択は、システム設計者によってトライ アンド エラー を基礎としてしばしば決定されてきた。上記に記載の平行構造システムが一般的に有益であると証明されていないが、この構造の一つのバージョンは、ある可能性を示している。訓練と非依存データーベースのために訓練プロセスが決定プロセスの正確性を越えることは知られている。また、一般化しようとするネットワークの能力は崩れる。すなわち、ネットワークは、あるケースでデータベースと平行のシステムと存在するが、いまだ幾つかの顕著な違いをともなっている。ネットワークは、訓練の初期段階で適切な決定を行うことができるが、ネットワーク後の間違った決定は完全に訓練されてしまう。これは時々、若いネットワーク対古いネットワークジレンマと呼ばれている。従って、幾つかのケースでは、古いネットワークを若いネットワークと平行に使用することは、両ネットワークのいくつかの利点を保持することができる。すなわち、古いネットワークの高い正確性が、若いネットワークのより大きな普遍性と共役した。再び、これら特定の技術の何れかを選択することは、特定の車へ適用するシステムを設計する過程の一つであり、この発明の主要な課題である。使用された道具の特定の組み合わせは、特定の応用及びシステム設計者の経験に依存する。
【0080】
上記の方法は、超音波振動子の使用との関連で記載されている。しかしながら、多くの方法は、また、光学、レーダー、容量性及び他のセンシングシステムへ応用可能であり、応用可能な場合、本発明は超音波振動子に限定されるものではない。時に、本発明の重要な特徴は、、一つの受信機が新聞紙のような物資でブロックされても、システムがまだ高い信頼性で作動するように、3又はそれ以上の分離されて配置された受信機の適切な置き換えである。また、この特徴は、超音波に代わって電磁気放射線を使用したシステムへ応用できる。しかしながら、特定の位置は、特定の振動子の特性に基づいて異なる。二次元カメラに基づいた光学センサー又は他のイメージセンサーは、例えば、超音波センサーのケースのように長方形の角に配置されるよりは、監視されるべき席を囲む長方形の側面により適切に配置される。これは、カメラが上下距離及びその目的物までの距離よりも領域視界を横断距離を測定するために最も適している、センサーからアキシアル距離を超音波センサーが測定するためである。電磁気放射線の使用とともに非常に低いレベルライトの感度の分野において最近得られた利点によって、ある装置においては、トランスミッターを除き、バックグラウンドライトを、レシーバーから目的物までの距離を得るための自動フォーカシングのような技術を使用することともに照明のソースとして使用することが、現在は可能である。よって、システムの複雑さをさらに減じるためには、単にレシーバーが必要である。
【0081】
上記において暗黙であったが、強調すべき本発明の特徴は、分布された振動子実装を有するシステムを開発すす方法である。背向け子供シート(RSFC)及び位置外問題を解決する試みを有する他のシステムは、単一の振動子実装位置又は最も多くても二つの振動子実装位置に依存する。このようなシステムは、容易に新聞紙又は乗員の手によって見えなくすることことができ、例えば、乗員と振動子の間で乱用される。この問題は、取り付けられた3又はそれ以上の振動子よって取り除かれ、これらは、乗客の区分容積の対象からは、明らかに異なった視界となる。システムが、例えば、FIG.9.の分布システムに例示されているような4つの振動子を使用することを適用すると、2つの振動子がそれらが作動できないように覆われても、システムは正確性において単に僅かの減少を被る。
【0082】
振動子がブロックされた場合には、システムのすべての利点を得ることは重要である。訓練と非依存データベースは、ブロックされた振動子の多くの例を含む。パターン認識システム、このケースにおける神経ネットワークが、かなりの数のブロックされた振動子のケースにおいて訓練されていなければ、そのようなケースを後に認識するのに良い働きを行わない。車で高い信頼性を示し、切迫した発明の重要な側面であるシステムを設計することの成功のためにはデータベースの組み立てが重要であり、このは、さらにもう一つの例である。
【0083】
特殊な適用に対するシステムを設計する過程の一部と成り得る又は成り得ない他の技術は以下を含む。
1.ファジー論理。 上述したように、ニューラル・ネットワーク(神経回路網)は、頻繁に、過去に遭遇したことと異なる状況を生じると、不合理な結論に帰着する特性を示す。頻繁に、正規のオブザーバーが入力データを見ると、データに対する境界が明らかとなり、それらの境界から外れる場合は、不正なデータと不測事態によるデータのどちらかを示している。時折、システム設計者がこれらの場合を処理する規定を加えることが望ましい。これらはファジー論理型規則又は人知を基礎とした規則となりうる。1例は、データベクタのある部分がシステムがエアバック作動状態になる予測範囲から外れるときである。
2.遺伝子的アルゴリズム 特殊車両のニューラル・ネットワーク(神経回路網)アルゴリズムを開発するとき、可能性のある最適なアルゴリズムを選択する保証はない。最適なアルゴリズムを選択する公算を改善する1つの方法は、複数の遺伝子的アルゴリズムの原理を取り入れることである。この原理の1つの適用において、ネットワーク構造及び/又はノード負荷は、さらに高い成功率を有する他の組合せを見つけ出そうと、擬似ランダムで変化する。このような遺伝子アルゴリズムシステムの解説は上述引用本(文献?)の計算知能に載っている。
3.予備的処理 軍用目的として、データ自体よりむしろそのデータのフーリエ変換を使用することが共通に容認されている。これは特に乗員及び車両の位置とは対照的に、分類に特に有効である。モジュラーネットワークを使用したとき、例えば、分類化ニューラル・ネットワーク(categorization neural network)に対してデータのフーリエ変換を使用し、位置決定ニューラル・ネットワークに対して非変換データを使用する。近年、ウエーブレット変換が予備的処理として注目されている。
【0084】
4. 乗車位置決定比較 上記、動的位置外の課題において、特殊ベクタでデータ品質を決定するフィルタとして乗車位置を決定できることが検討されている。所定の乗車位置に基礎を置いたデータベクタの品質を改善する方法として、一般的にこの方法を用いることができる。車内の有生物と無生物を識別するのを助けるためにこの技術を発展させることもできる。例えば、facing humanは車両の移動中に頻繁に位置を変え、それに対して、ボックスはほとんど動きを見せない傾向にある。これも、例えば、小柄な人間と空席を識別する上で有用である。その特殊ベクタが著しい相異を示さないとしても、小柄な人間を収容したシートの動きは空席の場合とは大きく異なる。つまり、2つの連続的なベクタとの相異から成るベクタは動き及び乗車の・・・を示している。
5.遮断トランスデューサ 除去トランスデューサの下位集合(部分集合)においてのみ学習した異なるニューラル・ネットワークを使用するためにこのような状況を理解するときに、時折、肯定的に遮断トランスデューサを識別することが望ましい。特に、3つのトランスデューサにおいて学習されたので、このようなネットワークは全般的に遮断トランスデューサの1つを具備した4つのトランスデューサにおいて学習されたネットワークよりもさらに正確に実施する。遮断トランスデューサが識別されると、その状態が適当な時間以上続くか否かを乗員に通知できる。
6.その他の基本的な構造 逆方向伝播ニューラル・ネットワークは極めて成功した多目的ネットワークである。しかし、複数のアプリケーションにおいては、さらに適切に実施できる他のニューラル・ネットワーク構造がある。例えば、上述したような並列ネットワークはシステムにおいて著しく改善することを理解する場合、特殊なニューラルネット・ワークがデータ内に存在する情報全てを制限することに成功していない。このような場合において、結果が改善すれば、RCE確率論理予測(RCE, Stochastic, Logicon Projection)又はニューラル・ネットワーク構造のその他約30タイプのうちの1つを理解する試みが可能となる。したがって、この並列ネットワーク試験は、現在のニューラル・ネットワークが利用可能なデータを効率的に利用できる規模を決定する有用な手段である。
【0085】
7.トランスデューサ幾何 特殊車両のシステムを設計する上で頻繁に使用される別の技術は、トランスデューサの方向と領域角度(field angle)を向けて最適な取付け位置を決定するニューラル・ネットワークを使用することである。特に扱いにくい車両に対して、かなり多くの超音波トランスデューサを設置し、例えば、最も小さいトランスデューサを除去するニューラル・ネットワークを使用することが望ましい。これは、まず、上記記載の全種のトランスデューサを組合せ、後に剪定する。
8.データ品質 多量のデータをとることは極めて容易であり、大きなデータベースがニューラル・ネットワークのかなり長い学習時間を要するので、ニューラル・ネットワークを使用してデータベースの可変試験を行うことができる。例えば、データベースの半分のデータを除去した後に、システム設計者はバリデーションデータベースに対して学習ニューラルネットワークの性能が低下しない場合、システム設計者は学習データベースは多量の冗長データを有する。他のデータと実質的に区別できないデータを除去する類似性分析のような技術を使用できる。修正を加えたデータベースが重要となるので、全般的にデータベースにおいて、同一のもの又は同一のベクタを有することが望ましい、したがって、ベクタの存在はバイアスシステムを可能にし、一般化から記銘化するようにシステムを運転する。
9.環境的要因 評価は、ニューラルネットワーク及び実験の設計などの技術を用いたシステム精度についてのデータ集積の間に環境的影響の変化を使用して有利な効果をなすことができる。
【0086】
10.データベース構築 一般に、トレーニングデータベースは、ニューラルネットワークが認識すべき全ての占有状態が、トレーニングデータベースでほぼ等価に示されるべきであるという平坦な意味を持つと考えられている。一方、典型的には、独立データベースは、トレーニングデータベースと同様に構成される。一方、確認データベースは、典型的には現実世界の実験からの代表的ケースに対して非平坦である。確認データベースは平坦である必要はないので、多くの極端なケースを包含し、殆どの共通するケースで高度にバイアスされる。
11.バイアス 全ての着席状態占有状態は等しく重要ではない。最終システムは前向きの定位置の人間については100%近い精度である。それは現実世界の状態の大多数を含むので、ここで精度が多少でも低下すると、占有者の保護が他に利用可能な状態ではエアバッグの展開が起こる。よって、精度の僅かな低下が死亡及び傷害を大きく増加させうる。しかしながら、これは平衡のとれないネットワークが一般性の低下を導くので危険でありうる。
12.スクリーニング データ獲得に関連するループは重要である。即ち、データはデータが獲得されたとき、それが良好なデータであるかを確認するチェックをすべきである。悪いデータは、電力ラインでの電気的妨害、溶接装置近くなどの超音波供給源、又は人間の誤操作等によって起こりうる。例えば、データがトレーニングデータベースに残る場合、ネットワークの性能を低下させる。悪いデータを削除する幾つかの方法がある。最も有望な方法は、30,000から50,000ベクトル等の初期値を取り、暫定的なネットワークを生成することである。
【0087】
13.ベクトル正規化方法 存在検出を通して、ベクトルはベクトルの全てのデータに基づいて正規化され、即ち、0から1の範囲の全てのデータを有する。特定のケースについては、正規化過程を選択的に適用し、各トランスデューサからのデータの初期部分ではデータを異なって削除又は処理するのが望ましいことがわかった。
14.誤差抽出 ニューラルネットワークシステムの成功は、ネットワークに追加データが入力されるか否かによることが多い。一例は、最初のピークが現れる前の0データ点の数である。あるいは、最初のピークまでの正確な距離は、データのサンプリングの前に決定しうる。他の特徴は、ピークの数、ピーク間の距離、最大ピークの幅、正規化係数、ベクトル平均及び偏差などを含む。これらの正規化技術は、システムの精度を僅かに向上させるために適合過程の最後に使用されることが多い。
15.ノイズ 文献には、データへのニューラルネットワークから与えられるノイズの付加が、ニューラルネットワークの精度を向上させることがしばしば報告されている。しかしながら、温度勾配の存在下でのネットワークのトレーニングは、データへの人工的なノイズの付加の必要性をかなり排除することを示した。それにも関わらず、幾つかの場合では、低レベルの無作為な任意のノイズがトレーニングされたデータに付加された場合に改善が観察された。
【0088】
16.セットアップの写真記録 全てのデータが集積されニューラルネットワークのトレーニングに使用された後、ニューラルネットワークで分析したときに弱い又は悪い判定を与えるベクトルがかなり見出された。これらのベクトルは、特に隣接するベクトルとの比較に置いて注意深く研究し、弱く悪い判定の不特定原因の存在を確認する必要がある。これは、シートの占有者の良好な画像を得られる位置に取り付けられた幾つかのカメラによってなされる。データセットアップの写真記録を持つことは、車両が路上しけんを受けている際に類似の結果が得られて場合にも有用である。路上試験の間もカメラは存在し、試験技術者はシステムが正しい応答をしないときは何時でもデータの収集を開始する必要がある。この現実世界試験のベクトル及び写真は、後に実験室の類似のサンプルと比較され、トレーニングされた車両の車両セットアップのマトリクスの誘導における誤りのデータが存在するか否かを見る。
17.自動化 車両におけるデータ収集の際に、車両のシート、シートバック、ウィンド、バイザー等の動作を自動化するのが望ましく、このようにして、小手他のアイテムの位置はシステム設計者が意図するようにコントロールされ分布される。これは、1つの配置でデータを取りすぎネットワークが不均衡になる可能性を最小にする。
【0089】
18.自動セットアップパラメータ記録 正確なデータセットを達成するために鍵となるセットアップのパラメータは、自動的に記録すべきである。これらは、車両内の種々の位置でのオンで及び、車両シート及びシートバックの位置、ヘッドレスト、バイザー及びウィンドの位置を含み、可能ならば車両占有者の位置を含む。これらのパラメータの自動記録は人間の誤差を最小にする。
19.レーザーポインタ 搭乗者及びパート面との表面に取り付けられたホーン全体での最初のデータ収集に間に、データ収集過程でトランスデューサが突発的に動かないように注意する。この可能性をチェックするために、小型のレーザーダイオードを各トランスデューサホルダーに挿入する。レーザーは、搭乗者コンパートメントの他の幾つかの面を照射するようにされる。
【0090】
20.多周波数トランスデューサ配置 動的な位置のずれについてデータを集積する場合、超音波トランスデューサの各々は異なる周波数で作動させ、全てのトランスデューサが同時に送信できるようにする。この方法により、データは各10ミリ秒毎に収集され、それは衝撃前の衝突前ブレーキの間に占有者の動きをおよそ把握するのに十分な速度である。35から70kHzの間の8つの周波数を見出すために、周波数の間隔は5kHzが必要である。従来の電気的フィルタを使用してキープアウトゾーンにおいて望ましい分解能を得るのに十分な間隔を与えるために、10kHzの間隔が望ましい。これらの不適合な要件は、トランスデューサを思慮深く配置することにより解決できる。このような配列の例を図11にしました。この実施例については、トランスデューサは以下の周波数で作動する:A 65kHz、B 55kHz、C 35kHz、D 45kHz、E 50kHz、F 40kHz、G 60kHz、H 70kHz。実際には、上記の概念に結合した他の配列も作動する。
【0091】
21.データ集積におけるPCの使用 トレーニング、独立及び確認データベースのためのデータ集積をするとき、種々のスクリーニング方法を使用してデータを試験し、データをモニタ上に表示するのが望ましいことが多い。よって、データ集積の間に、通常は、実験室でのデータ取り込みにはデスクトップPC、路上でのデータ取り込みにはラップトップPCを用いて過程を監視する。
22.参照マーカー及びゲージの使用 シート、シートバック、ウィンド等の位置の自動的記録の加えて、あるいはそれに代えて、種々の可視化マーキング及びゲージがしばしば用いられる。これは、シートバックの角度位置、シートトラックのシートの位置、ウィンドの開放などを含む。また、占有者の自動トラッキングが備えられていない場合、可視化マーキングが配設されて技術者は特定のデータ取り込み実験のために試験占有者が要求されるゾーンに存在することを観察する。空間に可視ラインを生成するためにレーザーダイオードが使用され、キープアウトゾーン又は他の望まれるゾーンの境界を表す。
【0092】
ここに記載した適合過程は、車両占有者に関する情報を提供するトランスデューサの任意の組み合わせに適用できることを認識するのは重要である。これらは、重量センサー、容量センサー、誘導センサー、湿度センサー、超音波、光学、赤外線、レーダーを含む。適合過程は、特定の車両モデルについての項をトランスデューサの選択で始まる。パターン認識システムは、獲得したデータを用いて開発され、精度評価がなされる。更なる実験は、もし存在するならば、設計から除外されるセンサーの決定をなす。一般に、設計過程は過剰のセンサープラス対象物から始まり、最終設備に幾つのセンサーが置かれるかによる。適合工程は、何れのトランスデューサが最も重要であり、何れが最も重要度が低いかを決定し、重要度の低いトランスデューサが除去されたシステムコスト及び複雑さを低下させる。
幾つかの好ましい方法を例示し、上に記述したが、自動車の搭乗者コンパートメント内部の異なる位置に配置された異なるセンサーの組み合わせもあり、それらは対象物の同じ又は異なる特徴を測定して、ここに記載したものと類似の目的を達成する。また、上記に加えて多数の付加的応用が、車両のドライバーシート、センターシート、又はリアシートの監視を含み、エアバッグシステムに加えて他の車両システムのコントロールを目的とする。本発明は、上記の実施態様に限定されず、下記の特許請求の範囲によって決定される。
【0093】
補足1
ニューラルネットワークトレーニング及びデータ前処理方法の分析−実施例
1.序文
空間感知センサー (Occupant Spatial Sensor) (OSS) の「頭脳」を形づくる人工ニューラルネットワークはエアバッグの状態のパターン(容易形と無力形)を認識するようにトレーニングしなければならない。トレーニングの中で最も重要な部分は自動車の中のいろんな条件で取られたデータである。そのデータは形状に適切にあたえる形を記述する。データの処理(例えばフィルターリング)はそのデータの中にある情報の質を上げる条件で適切になる。基本的な ネットワークのアーキテクチャ と使われたトレーニングの方法も大切である。その2つは人工ニューラルネットワークの学ぶことと概括の能力を決めるからである。方法とフィルター のテストとしては実用的に行われたテストが最もいい。
空間感知 センサー(OSS) はエアバッグをプログラミングする状態のパターン(容易と無力)を認識するために人工ニューラルネットワーク(ANN)を使う。パターンは自動車の前席の範囲を占める4つの 超音波受発信機で定める。4つ受発信機の信号は電気的に加工される反響信号から成り立っている。電気的な加工は増幅 (対数の 圧縮), デモデュレーション (周波帯変換フィルターリング)に伴い分離識別 (サンプリング) と信号のデジタル化を含んでいる。一つの必要なソフトウエアプロセシングは信号が人工ニューラルネットワークに入る前には正常化という(取られらデータを0 と 1の数にする)過程である。
データを何度も処理されているが、加工された信号は(情報が全部同じ方法で加工されるので)まだ「生」信号として認められている。
未加工の信号が人工ニューラルネットワークに入る前にはフィルターを適用するのは可能である。フィルターの目的はシステムの特色を改善するために、大切な情報の質を上げること。当追加には自動車の中にANNトレーニングする時に使われた幾つかのプレプロセッシングフィルターを記述している。
【0094】
2.データの記述
人工ニューラルネットワークの特色はシステム をトレーニングする時に使われたデータに基づく。データの量と可能性の分布域がシステムのパターンを認識することと概括の能力に影響させる。OSS向けのデータはベクトルから成り立っている。各ベクトルは4つの超音波受発信機から受け取った信号の大切な部分の組み合わせになっている。
典型的なベクトルは100加工の結果を含め、各結果は超音波受発信機で取った反響信号の(時間的にずれた)レベルである。
三次元のデータセットを集める。第1の種類はトレーニングのデータであり、エアバッグの展開か無展開のシナリオを認識できるANNに入れたパターンを持っている。第二のデータ種類は無所属のテストのデータ。第三データの種類は実用的な(実走行によって確認した)データである。当種類は人工ニューラルネットワークの効果率(成功率)を評価するために使う。
表1は自動車で取ったデータの3種類の特色を示す。データの種類は3に分けられる特徴付けている。形状の数値は人と物の数を現す。仕組みの数は自動車の中に形状と物の仕組み(席の仕組みや席の横になる角、自動車の屋根、窓、などの状態)の数を現す。ベクトルの数は人か物の動きの上で取られた仕組みの数と形状の数である。
【0095】
1.1トレーニングデータセットの特徴
トレーニングしている時のデータはデータの分布を現す部分に分ける。表2はトレーニングしている時にデータが客席の3グループで(空席、乗客がいる席とチャイルドシート)の分布であることを現す。乗客はみんな大人であった。子供は前向きにチャイルドシートに座った子供だけであり、他の席座ることがなかった。表 3 はチャイルドシートを最も詳しく分類することを現す。表4は車内環境により分されたいろんなパターンを現す。
1.2独立試験データの特徴
独立試験データを取るのにトレーニングデータと同じ形状や対象、オブジェクト、条件を使うのでその形状と分布もトレーニングデータと同じである。
1.3確認データの特徴
表5は分類された評価的なトレーニングデータの分布することを現す。その分布はトレーニングデータの仕組みに近い。しかし、今回参加した乗客は大人(全人数の27%)と並び子供(全人数の12%)も含めている。表 6は人間の 分布を表す。トレーニングデータテストと無所属のテストとは逆に、3歳から6歳までの子供がチャイルドシートに座る限定ではなかった。表7にはチャイルドシートの分類を現す。一方では移動した前向きのチャイルドシートについてのデータを取らなかった。子供とチャイルドシートのタイプもトレーニングデータテストと無所属のテストのタイプと違う。表8はいろんな車内環境の状態で取ることを現す.
【0098】
3.ネットワークのトレーニング
基本的ネットワークは117入力節や2つの隠れた層にそれぞれ20節と7節、1の外出した層の1節からの4つレベルのフィードバックシステムから成っている。外出した層は超音波受発信機のこう後部(A), A−柱 (B),と上のコンソール(C, H)にある入力から成っている。表9は各チャンネルがベクトルを作っている点の数を表す 。
人工ニューラルネットワーク は Neural Works Professional II/Plus というソフトにより操作する。数学的なパターンをトレーニングするために使われる方法としては拡張のDelta−Bar−Deltaを修得する規則とシグモイドトランスファー機能に基づくフィドバックである。拡張学ぶのDelta−Bar−Deltaという規則はグラジエントの前のバリューを用いる。故に各接続は個々修得範囲と個々インパルスパラメーターを持ち、自動的に計算する。
ネットワークは上記の記述されたトレーニングおよび無所属テスト・データ・セットを使用して、訓練された。最適(無所属のテスト・セットに対する)は3,675,000のトレーニング・サイクルの後に見つかった。各トレーニング・サイクルは650,000の利用可能なトレーニング・セット・ベクトルから任意に選ばれて、30のベクトル(時代として知られている)を使用する。テーブル10は、基線ネットワークの実行を示す。
ネットワークの実行は、無所属のテストの部分集合に対する成功率の調査によりさらに分析される。エアバッグに対する成功率、94.6%で条件を可能にする、エアバッグに対するそれと事実上等しい、94.4%で条件を不能にする。表11は、様々な空間感知セットの部分集合用の成功率を示す。表12は環境上の条件部分集合用の成功率を現す。このデータの分布はマトリックスの全体にわたって全く平衡を保たれるとは限らず、システムの実行が熱源によって著しく下げられないことが結論を下されるかもしれない。
3.1正規化
正規化は、ネットワークのトレーニングに受理可能な範囲への実際のデータ範囲を計るために使用される。 NeuralWorksソフトウェアは、一連の0〜1へ入力データをもたらすことを計る要因の使用に包括的に要求している。いくつかの正規化の方法はシステム実行に対するそれらの影響のために調査された。
実際のデータは12ビットデジタル化された信号から成る。0と4095の間の値を備えた。 図20は典型的な未加工の信号を示す。未加工のベクトルは4つの信号の結合したセクションから成っている。
個々のベクトルの正規化の3つの方法は検査された:
a.全ベクトル(基線)の最も高く最低である値を使用する正規化。
b.ベクトルを個々に構築するトランスデューサチャンネルの正規化。この方法は、各チャンネルの最も高く最低である値を使用する。
c.固定範囲 ([0、4095]) を備えた正規化。
【0103】
正規化研究の結果は表13に要約される。
【0104】
固定範囲を使用する正規化は、1つのベクトルの相対的強弱度に含まれていた情報を保持する。これから、基線方法のその上に固定範囲正規化でトレーニングされたネットワークの実行が増加することは期待される。しかしながら、正規化なしでは、入力範囲が、0から最大の値まで概しない(図1を参照)。入力層のデータの絶対値はネットワーク容量トレーニングに影響する(方程式[1]および[2]を参照)。ネットワークトレーニング中に、より小さな入力範囲を備えたベクトルは、十分な範囲を測るベクトルより各処理要素(ニューロン)で計算された容量に影響する。
【0105】
入力層で評価における最高と最低の変動はネットワークのトレーニングに負の効果をもたらす。これは、評価データにより低く反映される原因になる。
正規化の第2の影響は、0〜1の十分な範囲上に信号を伸ばすことにより、包括的に信号の分解を増加させることである。ネットワークが信号の高いピークから修得するので、それは一般化能力に良い影響をを与え、評価も高くされる。
相対的なベクトルの強度に含まれていた情報を保持するよりネットワークトレーニングに入力価値の固定範囲および基線正規化方法に起因する、増加した解決の影響が、より強い効果があることが結論を下される。
【0106】
3.2低閾値フィルタ
未加工の信号に含まれていたすべての情報がネットワークトレーニングに役立つと考えるわけではない。低い振幅エコーは、トレーニング・データに含まれていてはならない超音波のフィールドの以外のオブジェクトから後ろに受け取られる。さらに、低い振幅雑音は様々な出所から、信号内に含まれています。この雑音は信号が弱いところで現われ、最も強い低閾値フィルタの使用によって、それらがネットワーク・トレーニングのために使用される前に、ベクトルの信号対雑音比は改善することができます。
3つの遮断レベルが使用された:信号の最大値(4095)の5%、10%および20%。使用される方法は、低閾値レベルまでのしきい値より下の値をもたらす。後のベクトル正規化(基線方法)は十分に信号を伸ばす範囲の[0、1].
【0107】
低閾値研究の結果は表14の中で要約されます。
5%および10%のフィルタでトレーニングされたネットワークの実行は、基線ネットワークのそれに似ている。小さな実行低下は、20%のフィルタでトレーニングされたネットワーク用に観察される。これから、騒音レベルがネットワークトレーニングに影響しないのに十分に低いことは結論を下される。同時に、ネットワーク実行に影響せずに、信号のより低い10%を廃棄することができることは結論を下されるかもしれない。これは、信号が最大のフィールドの強度の10%と等しい、超音波のフィールドの以外の境界線の定義を許可する。
【0109】
4.ネットワークタイプ
一般的なネットワークはバックプロパゲーション(back−propagation)タイプのネットワークである。バックプロパゲーションにより帰ってきた情報は一般的な問題を解決し、予測、分類、システム・モデリング、フィルターリングのために使用されたネットワーク・パラダイムである。バックプロパゲーションが実際の出力と希望した出力間のエラーを計算し、ネットワ ーク中の各波節にこのエラー情報を広めることにより修得する。このバックプロパゲーションで広められたエラーは各ノードで修得を駆り立てるために使用される。バックプロパゲーションネットワークの利点がいくつかある。それがグローバルエラーを最小限にすることを試みて、それが、複雑なデータ・セットで非常にコンパクトに分けられた表現を提供することができることである。弱点はネットワークの分布された性質によりその遅い修得、および不規則な境界および予期しない分類地方である。また、限られていないトランスファーの使用は機能します。これらの弱点のうちのいくつかは、Extended Delta−Bar−Deltaパラダイムのような修正済のバックプロパゲーション方法の使用により克服することができる。 EDBDアルゴリズムは、ネットワーク(それはネットワークトレーニングの最適化を促進する)中の各接続の修得範囲および勢いを自動的に計算する。
【0110】
基線ネットワークとは異なっている特性を持っている、他の多くのネットワーク・アーキテクチャーもある。これらのうちの1つはロジコン射出ネットワーク(Logicon Projection Network)である。このネットワークは開いた境界ネットワーク(伝播(back−propagation)ネットワークはそれに属する)と閉じた境界ネットワークの種の利点を組み合わせている。閉じた境界ネットワークが入力データ・ポイントに直ちにプロトタイプを置くことができ、これらのプロトタイプに入力データをすべて一致させることができるので、修得して、閉じた境界ネットワークは速い。開いた境界ネットワークは、他方では、適正なgradientによって出力エラーを最小限にする能力を持っている。
【0111】
5.結論
確認データ・セットに対して92.7%の成功率に修得された基線の人工ニューラル・ネットワーク。このネットワークは4層伝播(back−propagation)アーキテクチャーを持っており、拡張デルタ棒デルタ(Extended Delta−Bar−Delta)修得規則およびsigmoidを使用し、機能を転送する。ポストプロセシング処理が“five consistent decision”フィルタを包含していた一方、前プロセシングはベクトル正規化を包含しました。
独立試験データのために使用された対象およびオブジェクトはそれらがトレーニングデータのために使用したのと同じ物でした。これはネットワークの分類および一般化の能力に悪い影響を及ぼす可能性がある。
独立テスト・データの空間の分布は、トレーニングデータのそれと同じくらい広かった。これは、空間の大量を横切って一般化することができるネットワークに帰着した。より小さなボリュームを横切ったより高い実行、ものが分布カーブの以外のより低い実行と結合して、正規分布のピークの近くで直ちに位置した、望ましい。
これを達成するために、無所属のテスト・セットの分布はシステム用の正常分布の反映(a.k.a.未加工の群)である必要がある。
【0112】
前処理方法の修正か追加の前処理方法の適用は、基線ネットワークのその上に実行の重要な改善を示さなかった。それが、固定範囲の中で入力価値を維持することにより修得を改善し、信号の解決を増加させるとともに、基線正規化方法は最良の結果を与えた。Low Threshold研究は、エコー・パターン中のより大きなピークからネットワークが修得することを示した。前プロセシング技術は、これらのピークを出す信号の解決を増加させることに向けられるべきだ。
原寸には満たないを使用して、固定範囲正規化と低閾値を組み合わせて、調査するために一層の研究を実行することができる。これは、0と1の間に写像することができる固定範囲へ有効に各ベクトルを強要して、飽和に低閾値の値および1つの値で少なくとも1ポイント含めることを各ベクトルに強いるだろう。相対的なベクトルの強度に含まれていた情報を保持している間、これは肯定的な結果に基線正規化に関係している。その後、スケーリングの結果、0〜1の範囲の外部で落ちる未加工のベクトル・ポイントは、0と1までそれぞれ写像されるだろう。
ポストプロセシングはメモリ機能を備えたネットワーク認識能力を増強するために使用されるべきだ。そのようなものの可能性は、空間の置く機能も両方のオブジェクト分類も実行する1つのネットワークの必要によって現在挫折する。空間の置く機能の実行は、急速にシステム・ステータスを更新する柔軟性を要求する。ネットワークによって不正確に分類される時折の模様の影響を無効にするために、オブジェクト分類は他方では、決定厳格から利益を得る。
【0113】
補足2
OPSシステムDOOPネットワークをトレーニング(修得)する過程。
1.消費者の要求および救出条件の決定。
1.1ゾーンの数。
1.2出力(アウトプット)の数。
1.3危険ゾーンの決定。
1.4重大な定義の範囲(つまり危険にひんしている空席、安全席、など)。
1.5DOOP処理の速度を決定してください。
2.プログラム用のPERT図表を開発する。
3.トランスデューサマウント(mount)のための実行可能な位置を決定してください。
3.1加工性
3.2再現性
3.3露出 (車生活の間の損害に有能でない)
4.取り付けロジスティクス位置を評価してください。
4.1フィールドの測定。
4.2マルチパスの反射。
4.3トランスデューサ目標(Transducer Aim)。
4.4障害物/望まれないデータ。
4.5視界の目標。
4.6主要なDOOP(Primary DOOP)トランスデューサ必要条件
5.プログラム(乗り物の本)のドキュメンテーション記録を開発してください。
6.車内のトレーニング変数を決定してください。
6.1座席軌跡ストップ。
6.2ハンドルのストップ
6.3席の角度。
6.4衝突の間のDOOPトランスデューサ封鎖状態。
6.5その他
7.車の中の危険ゾーンで決定しマークしてください。
8.物理的な妨害の位置を評価する
8.1取り付け空間/トランスデューサへの余地
8.2十分な困難を増大する表面。
8.3障害物
9.トレーニング、無所属、評価のDOOPデータ・セット用マトリックスを開発してください。
10.データ収集のために必要とされる必要な設備を決定してください。
10.1チャイルド・シート/ブースター・シート/チャイルド・シート など。
10.2地図/レザー/組み立て
10.3その他
11.フレックスタイムスケジュールテスト(Schedule sled tests)は、初期のDOOPネットワークおよび最終のDOOPネットワーク用にテストする。
12.DOOPのためのテスバック(test buck)を設計してください。
13.DOOP試験にはダミーの設計テスト。
14.任意の必要な変数を購入してください。
14.1チャイルド・シート/ブースター・シート/チャイルド・シート など。
14.2地図/レザー/組み立て
14.3その他
15.車属品の自動コントロールをトレーニングしてください。
15.1変数空席の状態で自動的な座席コントロール。
15.2変数空席の状態で自動的な席の角度コントロール。
15.3変数空席の状態の自動的なウィンドー・コントロール
15.4その他
16.自動コントロールを構築するために設備を得てください。
17.車変数の自動コントロールの構築とインストールをしてください。
18.データ収集助手(aides)をインストールしてください。
18.1温度計
18.2軌跡ゲージ。
18.3座席角度ゲージ、
18.4その他
19.スイッチとヒューズを取り付けた配線をインストールする:
19.1トランスデューサのペア
19.2レーザー
19.3決定指標(Decision Indicator)光線
19.4システムボックス。
19.5モニター。
19.6パワー自動化コントロール装置。
19.7温度計、ポテンシオメータ
19.8DOOP空間感知範囲の装置。
19.9DOOP空間感知範囲指標
19.10その他
20.OPSシステムコントロル・ボックスのためDOOPオペレーティング・ソフトウェアを書いてください。
21.OPSには DOOPオペレーティング・ソフトウェアを有効にしてください。
22.車のための特別なDOOPオペレーティング・ソフトウェアを使用して、OPSシステムコントロル・ボックスを作ってください。
23.システムコントロル・ボックスを評価して、記録をしてください。
24.車の特定のDOOPデータ収集ソフトウェア(pollbin)を書いてください。
25.車の特定のDOOPデータ評価のプログラム(picgraph)を書いてください。
26.DOOPデータ収集ソフトウェアを評価してください。
27.DOOPデータ評価ソフトウェアを評価してください。
28.OPSシステムボックスにDOOPデータ収集ソフトウェアをダウンロアドして、有効にしてください。
29.OPSシステムボックスにDOOPデータ評価ソフトウェアをダウンロアドして、有効にしてください。
30.データ収集ソフトウェアのDOOPデータ収集技術およびデータ収集ソフトウェア使用上で専門家を訓練してください。
31.トランスデューサの既知の変数に基づいて、プロトタイプ・マウント(mount)を設計してください。
32.プロトタイプ・マウント(mount)
33.前構築(pre−build)マウント(mount)
33.1マウント(mount)にトランスデューサをインストールしてください。
33.2クロス・トークを除去するために最適化してください。
33.3希望のフィールドを得てください。
33.4マウント(mount)用のDOOP必要条件の実行を有効にしてください。
34.マウント(mount)を記録する。
34.1フィールドの相対のプロット。
34.2すべてのマウント(mount) 次元を備えた図面。
34.3マウント(mount)中のトランスデューサ位置の図面。
35.乗り物にマウント(mount)を入れてください。
36.ATIが設計した装置と明細を使用して、乗り物 の中にフィールドを入れてください。
37.DOOPトランスデューサ組み立ての媒体中の実行を決定してください。
38.センサーボリューム3を決定してください。
39.乗り物にマウントしたトランスデューサおよびフィールドを記録してください。
39.1ATI明細化
39.2すべてのフィールドの写真。
39.3入れたマウント(mount)図面および次元。
39.4記録センサ・ボリューム。
39.5目標及びフィールドの図面および次元。
40.データ収集ソフトウェアおよびOPSシステムボックスを使用して、16枚のトレーニングテスト・データ、無所属のテスト・データ、評価のテスト・データを収集してください。
41.ANNを修得するために初期の条件を決定してください。
41.1正規化の方法。
41.2伝播(back−propagation) あるは
41.3容量、
41.4その他
42.前プロセス・データ
43.上記のデータを使用して、ANNを修得させてください。
44.必要ならばポストプロセシング戦略を開発してください。
45.ポストプロセシングを開発してください。
46.評価データおよび車内分析の視点からANNを評価してください。
47.初期のDOOP結果を確認するためにフレクスタイムテストを実行してください。
48.DOOP実験結果および実行を記録してください。
49.必要ならばマウント(mount)を分解し、も一度ステップ31〜48を繰り返してやってください。
50.消費者に会って、プログラムを調査してください。
51.消費者の指導でされた出力の戦略を開発してください。
51.1必要ならば最終のANNの多数の決定ネットワーク用戦略を開発をしてください。
51.2必要ならば最終のANNの多数の層ネットワーク用戦略を開発してください。
51.3DOOP層/ネットワーク52の戦略を開発してください。
52.毎日の測定ジッグを設計してください。
53.毎日の測定ジッグを構築してください。
54.毎日の測定テストを開発してください。
55.毎日の測定テストの結果を記録してください。
56.毎日の測定テスト結果の記録
57.消費者の指導で決まった出力にとって車データ収集パターンをやり直してください。
58.データ収集のためのゾーン感知システム(identifiers)を拡大してください。
59.すべてのデータ・セットの項目を定めてください。
60.データ収集プロセスの項目をトレーニングしてください。
61.データ収集ソフトウェアおよびOPSシステムボックスを使用して、16枚のトレーニングテスト・データ、無所属のテスト・データ、評価のテスト・データを収集してください。
62.プログラム指令によって定めたベクトルの合計を収集してください。その合計はANNの出力および複雑さによって変わる。
63.ANNを修得させるために初期の条件を決定してください。
63.1正規化の方法
63.2伝播(back−propagation) あるいは
63.3容量、
63.4その他
64.前プロセス・データ
65.上記のデータを使用して、ANNを修得させてください。
66.ポストプロセシングの戦略を開発してください。
66.1容量化
66.2平均化
66.3その他
67.ポストプロセシング・ソフトウェアを開発してください。
68.評価データを使用して、ANNを評価してください。
69.乗り物穴を探索し、分析および実行をしてください。
70.乗り物のnon sledマウント(mount)のDOOPテスト実行する。
71次の修得およびプロセシングの必要を決定する。
72.必要ならばステップ58〜71を繰り返してください。
73.初期DOOP結果を確認するためのそり(sled)テストの実行
74.DOOP試験結果の記録と性能
75.必要ならばステップ58から74の繰り返し
76.簡略な実行レポートを書いてください。
77.消費者に乗り物(車)を使ってのプレゼンテーション。
78.消費者にOPS装備をされた乗り物(車)を配達すること。
【図面の簡単な説明】
【図1】本発明に従って開発されたシステムの着席状態検知システムを示す図であり、超音波又は電磁気センサー、重量センサー、背もたれ角度検知センサー、シートトラック位置検知センサー、心拍センサー、動きセンサー、ニューラル・ネットワーク回路及びエアバッグシステムの間の接続が車両コンパートメント内に設置されている。
【図2】フロントシートに2人の大人占有者を含む車両の透視図であり、本発明で教示された方法に従って配置された超音波トランスデューサの一つの好ましい配置を例示する透視図に車両を示した。
【図3】図2の搭乗占有者を前向きチャイルドシート内の子供に置き換えた図である。
【図4】図2の搭乗占有者を後ろ向きチャイルドシート内の子供に置き換えた図である。
【図5】図2の搭乗占有者を幼児シート内の幼児に置き換えた図である。
【図6】2つの超音波センサーの相互作用及びこの相互作用がいかにしてサークルを空間内に配置するかを例示する図である。
【図7】図2の占有者を除去した図であり、2つのサークルの空間内の位置及びそれらがいかにして後ろ向きチャイルドシート及びより大きな占有者に特徴的な容積を横切るかを例示する。
【図8】3−トランスデューサシステムの好ましい取り付け位置を示す図である。
【図9】4−トランスデューサシステムの好ましい取り付け位置を示す図である。
【図10】2つのトランスデューサについての標的容量識別を示すプロットである。
【図11】8−トランスデューサシステムの好ましい取り付け位置を示す図である。
【図12】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図13】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図14】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図15】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図16】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図17】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図18】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図19】本発明に従うニューラル・ネットワークのトレーニングに使用されるセットアップを示す表である。
【図20】組み合わされてベクトルを形成する4つの典型的な生シグナルを示すチャート図である。
Claims (51)
- 車両の搭乗者コンパートメントにおけるシートの占有状態を決定するためのシステムを開発する方法において:
各々のデータセットが異なるシートの専有状態を表し、シートが当該専有状態にある間にトランスデューサからのデータを受信し、トランスデューサからのデータを処理することにより形成される複数のデータセットを含む少なくとも1つのデータベースを作成し;そして、
シートの占有状態を表わすデータセットを入力した際にシートの占有状態を示す出力を発生することができる少なくとも1つのデータベースから第1のアルゴリズムを作成する工程を含んでなる方法。 - 前記少なくとも1つのデータベースから第1のアルゴリズムを作成する工程が:
アルゴリズム作成プログラムにデータベースを入力し、そして、
第1のアルゴリズムを作成するアルゴリズム作成プログラムを実行させる工程を含む、請求項1に記載の方法。 - アルゴリズム作成プログラムが、ニューラル・ネットワーク・アルゴリズムを作成するために実行される、請求項2に記載の方法。
- 少なくとも1つのデータベースが複数のデータベースを含む、請求項1に記載の方法。
- 少なくとも1つのデータベースに占有状態の異なる分配を与える工程を更に含む、請求項4に記載の方法。
- 最初のアルゴリズムにデータセットを入力して複数の出力データを得て、そして複数の出力データを組み合わせてシートの占有状態を示す新しい出力を形成するためにの第2のアルゴリズムを作成する工程を更に含む、請求項1に記載の方法。
- シートの占有状態が、後部に面したチャイルドシート、前部に面した人間、ずれた位置の人間、前部に面したチャイルドシート、及び空のシートからなる群から選択される物体によるシートの占有を含む、請求項1に記載の方法。
- シートの占有状態が、複数の姿勢の物体による占有及び新聞、本、地図、瓶、玩具、帽子、コート、箱、鞄及び毛布を含む群から選択された少なくとも1つの付属品による占有を含む、請求項7に記載の方法。
- データを処理してデータセットを形成する前にデータを前処理する工程を更に含み、前記前処理工程が、データセットにおけるデータの特徴から作成されたデータを使用する工程を含む、請求項1に記載の方法。
- 前記前処理工程で使用されるデータセットにおけるデータの特徴が、正規化係数、ピークに先立つデータ点の数、ピークの総数、及びデータセットの平均又は分散を含む群から選択される、請求項9に記載の方法。
- データを処理してデータセットを形成する前にデータを前処理する工程を更に含み、前記前処理工程が、正規化、切り捨て、対数変換、シグモイド変換、データの時間閾値化−平均化、フーリエ変換及びウェーブレット変換を含む群から選択される1又は複数を用いたデータの数学的変換の工程を含む、請求項1に記載の方法。
- データを処理してデータセットを形成する前にデータを前処理する工程を更に含み、前記前処理工程が、一のデータセットのデータを他のデータセットの対応するデータから差し引いて、差分データの第3のデータセットを作成する工程を含む、請求項1に記載の方法。
- データベースから誘導され、アルゴリズム作成プログラムにより処理される幾つかのデータセットを削除する一組の規則に基づいてデータセットを前処理する工程を更に含む、請求項2に記載の方法。
- ファジー理論の概念を用いた規則を誘導する工程を更に含む、請求項13に記載の方法。
- アルゴリズム作成プログラムへの入力から削除されたデータセットを利用して、第2のアルゴリズムを作成するアルゴリズム作成プログラムに入力されるデータベースを形成する工程を更に含む、請求項13に記載の方法。
- アルゴリズムの出力に、ファジー理論及びニューラル・ネットワークの一方の概念を適用する付加的処理を施す工程を更に含む、請求項1に記載の方法。
- 各データセットを妥当性に関する前処理アルゴリズムにより試験し、データセット中のデータが妥当性を欠く場合にデータセットを修正又は削除する工程を更に含む、請求項1に記載の方法。
- 誤差を含むデータセットを削除するためにトレインド・ニューラル・ネットワークを利用する工程を更に含む、請求項1に記載の方法。
- アルゴリズム作成プログラムが、少なくとも1つの計算機知能システムを使用する、請求項2に記載の方法。
- 特定の占有状態に向けてアルゴリズムをバイアスし、それにより当該占有状態を識別する精度を向上させる、請求項1に記載の方法。
- 前記処理工程が、トランスデューサからのアナログデータをデジタルデータに変換し、複数のトランスデューサからのデジタルデータを組み合わせて各トランスデューサからのデータ列を含むベクトルを形成する工程を含み、第1のアルゴリズムが、新たなデータセットからのベクトルの入力に際して、車両シートの占有状態を表す出力を生成するように作成される、請求項1に記載の方法。
- データベースのベクトルを正規化し、各ベクトルを含むデータの全ての値が最大値と最小値の間になるようにする、請求項21に記載の方法。
- 車両の搭乗者コンパートメントにおける車両シートの占有状態を決定するためのシステムを開発する方法において:
搭乗者コンパートメントの種々の位置における種々の占有物体を表すデータを得ることによりデータセットを作成し、データの少なくとも一部を操作してデータセットにおける最大データ値の大きさを最小データ値に対して縮小させ、
複数のデータセットを含むデータベースを形成し、そして、
当該シートの占有状態を表すデータセットを入力した際に車両シートの占有状態を示す出力を生成することのできるデータベースからアルゴリズムを作成する工程を含んでなる方法。 - データの少なくとも一部を操作する工程が、概算対数変換関数を用いた工程を含む、請求項23に記載の方法。
- 車両シートの占有状態を決定するためのシステムの開発に使用するためのデータベースを開発する方法において:
車両内にトランスデューサを取り付け;
シートを初期の占有状態とし;
トランスデューサからデータを受信し;
トランスデューサからのデータを処理して車両シートの初期占有状態を表すデータセットを形成し;
シートの占有状態を変化させて他のデータセットを形成するデータ集積工程を繰り返し;
各々が異なるシートの占有状態を表す少なくとも1000データセットを第1のデータベースに集積し;
第1のデータベースのデータセットの殆どについてのシートの占有状態を正しく決定する第1のデータベースからアルゴリズムを作成し;
アルゴリズムの作成に使用しなかったデータセットの第2のデータベースを用いてアルゴリズムを試験し;
アルゴリズムによって正しく決定されなかった第2のデータベースにおける占有状態を同定し;
正しく決定されなかった状態に類似する占有状態を含む新たなデータを集積し;
組み合わせたデータベースに基づいて新たなアルゴリズムを作成し;そして、
この工程をアルゴリズムの所望の精度が達成されるまで繰り返す工程を含んでなる方法。 - 生きている人間を使用して幾つかのシート占有状態を作成する工程を更に含む、請求項25に記載の方法。
- データの集積中に車両内部の環境的条件を変動させる工程を更に含む、請求項25に記載の方法。
- 前記環境的条件変動工程が、搭乗者コンパートメント内部の温度勾配の生成を含む、請求項27に記載の方法。
- データ集積工程においてパーソナルコンピュータが使用され、データセットがパーソナルコンピュータのモニター上に画像的に表示される、請求項25に記載の方法。
- 車両の占有状態の予め決められた分布を生成する系統的方法の一部として参照マーカー及びゲージを使用する工程を更に含む、請求項25に記載の方法。
- シート、シートバック、ヘッドレスト、ウィンドー、バイザー及びアームレストを含む群から選択される車両の種々の部材の一を移動的に記録する工程を更に含む、請求項25に記載の方法。
- 占有状態の変動が、データ集積工程の間のシート及びシートバック等の種々の車両部材の自動的移動により生ずる、請求項25に記載の方法。
- シートの占有状態の少なくとも幾つかを自動的に写真で記録する工程を更に含む、請求項25に記載の方法。
- 標準的なシート占有状態及び対応する予め記録したデータセットを用いてトランスデューサ及び集積工程の正しい機能を確認する工程を更に含み、データセットが、標準的な占有状態を周期的に取り込み、予め記録したデータセットと比較される、請求項25に記載の方法。
- 第1のアルゴリズムと組み合わせて、シートの占有状態を示す出力を生成することができる少なくとも1つのデータベースから少なくとも1つの付加的なアルゴリズムを作成する工程を更に含む、請求項25に記載の方法。
- 第1のアルゴリズム及び少なくとも1つの付加的なアルゴリズムの少なくとも一方が、シートの占有アイテムの範疇を特定し、第1のアルゴリズム及び少なくとも1つの付加的なアルゴリズムの他方が、シートの占有アイテムの搭乗者コンパートメント内の位置を決定する、請求項35に記載の方法。
- 第1のアルゴリズム及び少なくとも1つの付加的なアルゴリズムの少なくとも一つが、多数のトレーニングサイクルでトレインされたニューラル・ネットワークを使用し、第1のアルゴリズム及び少なくとも1つの付加的なアルゴリズムの他の少なくとも一つが、実質的に少数のトレーニングサイクルでトレインされたニューラル・ネットワークである、請求項35に記載の方法。
- 第1のアルゴリズム及び少なくとも1つの付加的なアルゴリズムの少なくとも一つが、少なくとも1つのデータベースのデータのサブセットでトレインされ、前記アルゴリズムの他の少なくとも1つが少なくとも1つのデータベースのデータの異なるサブセットでトレインされる、請求項35に記載の方法。
- データセットが、第1のアルゴリズム及び他のアルゴリズムの何れがデータセットを更に処理するかを決定する少なくとも1つの付加的なアルゴリズムの少なくとも1つに最初に入力される、請求項35に記載の方法。
- 車両の搭乗者コンパートメントシートの占有状態を決定するためのシステムを開発する方法において:
車両に複数の超音波トランスデューサを取り付け;
各トランスデューサからアナログ信号を受信し;
トランスデューサからのアナログ信号を処理して、車両の占有状態を示す各トランスデューサからの複数のデータ値を含むデータセットを形成し、前記データ処理がデジタルデータのデータセットを生成するためのトランスデューサデータの復調、サンプリング及びデジタル化を含み;
複数のデータセットを含むデータベースを形成し;そして、
シートの占有状態を表わす新しいデータ・セットの入力の際にシートの占有状態を示す出力を生成することができるデータ・ベースから少なくとも1つのアルゴリズムを作成する工程を含んでなる方法。 - 新たなデータセットを少なくとも1つのアルゴリズムに入力する前に、当該データセットの特定の位置における1又は複数のデータ成分を削除するための前処理をする工程を更に含む、請求項40に記載の方法。
- 削除されたデータ値が、トランスデューサからの各データ集積サイクルの間に得られた第1のデータに対応するデータ値である、請求項41に記載の方法。
- 何れのデータ値がデータセットから削除されるべきかを決定するためにニューラル・ネットワークを使用する工程を更に含む、請求項40に記載の方法。
- データセットから削除されるデータ値が、エアバッグ・モジュールから最も離れた面からの反射に対応する、請求項42に記載の方法。
- 超音波トランスデューサが、シートを囲む略菱形の角に取り付けられる、請求項40に記載の方法。
- 超音波トランスデューサが、それにより生成される超音波場が車両シートを囲む容積の相当部分をカバーするように向けられた、請求項40に記載の方法。
- トランスデューサ場の角度を、車両内の固定面外の反射を低減するように調節する工程を更に含む、請求項40に記載の方法。
- 車両の搭乗者コンパートメントの車両シートの占有状態を決定するためのシステムを開発する方法において:
車両に1組のトランスデューサを取り付け;
トランスデューサからデータを受信し;
トランスデューサからのデータを処理して車両の占有状態を表すデータセットを形成し;
複数のデータセットを含むデータベースを作成し;
新たなデータセットの入力に際して車両シートの占有状態を示す出力を生成することができるデータベースからアルゴリズムを作成し;
システム精度の基準を開発し;
トランスデューサセットから少なくとも1つのトランスデューサを除去し;
減少した数のトランスデューサからのみのデータを含む新しいデータベースを作成し;
新しいデータベースに基づいた新しいアルゴリズムを開発し;
新システム精度を決定するための新しいアルゴリズムを試験し;そして、
求められる正確さを有するアルゴリズムを作成する最小数のセンサーが決定されるまで、トランスデューサ除去、アルゴリズム開発及び試験を継続する方法。 - トランスデューサが、超音波トランスデューサ、電磁気センサー、光学センサー、容量センサー、重量センサ、シート位置センサー、シートバック位置センサー、シートベルトバックルセンサー、シートベルトペイアウトセンサー、赤外線センサー、誘導センサー、電場センサー及びレーダーセンサーからなる群から選択される、請求項48に記載の方法。
- 車両のドライバー及び助手席の占有状態を決定するためのシステムを開発する方法において:
異なる送信及び受信周波数を持つ超音波のトランスデューサを車両内に取り付け;
トランスデューサからのデータを受信し;
トランスデューサからのデータがを処理して車両の占有状態を表すデータセットを形成し;
複数のデータセットを包含する少なくとも1つのデータベースを作成し;そして、
新しいデータセットの入力の際に車両シートの占有状態を示す出力を生成することができる少なくとも1つのデータベースからアルゴリズムを作成する工程を含んでなる方法。 - 隣接する周波数を持つトランスデューサが互いに直接の超音波場内にない、請求項50に記載の方法。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13616399P | 1999-05-27 | 1999-05-27 | |
| US09/382,406 US6529809B1 (en) | 1997-02-06 | 1999-08-24 | Method of developing a system for identifying the presence and orientation of an object in a vehicle |
| US09/474,147 US6397136B1 (en) | 1997-02-06 | 1999-12-29 | System for determining the occupancy state of a seat in a vehicle |
| PCT/US2000/014903 WO2001014910A2 (en) | 1999-05-27 | 2000-05-30 | Method for developing a system for identifying the presence and orientation of an object in a vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004522932A true JP2004522932A (ja) | 2004-07-29 |
| JP2004522932A5 JP2004522932A5 (ja) | 2009-05-14 |
Family
ID=27384821
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001519213A Withdrawn JP2004522932A (ja) | 1999-05-27 | 2000-05-30 | 車両内の物体の存在及び姿勢を識別するシステムを開発する方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US6397136B1 (ja) |
| JP (1) | JP2004522932A (ja) |
| DE (1) | DE10084638T1 (ja) |
| SE (1) | SE523753C2 (ja) |
| WO (1) | WO2001014910A2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002347498A (ja) * | 2001-03-02 | 2002-12-04 | Nec Technologies Inc | エアバッグ展開制御のための多重センサビークル搭乗者検出システム及び方法 |
| JP2018512334A (ja) * | 2015-04-10 | 2018-05-17 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | 車内カメラによる乗員の寸法及び姿勢の検出 |
| KR20190055313A (ko) * | 2017-11-15 | 2019-05-23 | 주식회사 서연전자 | 탑승자 감지 장치 및 그 방법 |
| WO2022239195A1 (ja) * | 2021-05-13 | 2022-11-17 | 三菱電機株式会社 | 車両乗員検知システム及び車両乗員検知方法 |
Families Citing this family (98)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7660437B2 (en) * | 1992-05-05 | 2010-02-09 | Automotive Technologies International, Inc. | Neural network systems for vehicles |
| US20080234899A1 (en) * | 1992-05-05 | 2008-09-25 | Automotive Technologies International, Inc. | Vehicular Occupant Sensing and Component Control Techniques |
| US20070135982A1 (en) * | 1995-06-07 | 2007-06-14 | Automotive Technologies International, Inc. | Methods for Sensing Weight of an Occupying Item in a Vehicular Seat |
| US7766383B2 (en) * | 1998-11-17 | 2010-08-03 | Automotive Technologies International, Inc. | Vehicular component adjustment system and method |
| JP3532772B2 (ja) * | 1998-09-25 | 2004-05-31 | 本田技研工業株式会社 | 乗員の乗車状態検出装置 |
| IT1305155B1 (it) * | 1998-11-03 | 2001-04-10 | Valeo Sicurezza Abitacolo Spa | Maniglia per una porta di un veicolo. |
| US6578870B2 (en) * | 2000-07-12 | 2003-06-17 | Siemens Ag | Vehicle occupant weight classification system |
| US6539284B2 (en) * | 2000-07-25 | 2003-03-25 | Axonn Robotics, Llc | Socially interactive autonomous robot |
| US6801662B1 (en) * | 2000-10-10 | 2004-10-05 | Hrl Laboratories, Llc | Sensor fusion architecture for vision-based occupant detection |
| US6836754B2 (en) * | 2001-01-31 | 2004-12-28 | Key Safety Systems, Inc. | Biomechanical system development of a restraint system |
| US7436299B2 (en) | 2001-03-02 | 2008-10-14 | Elesys North America Inc. | Vehicle occupant detection using relative impedance measurements |
| US6904399B2 (en) * | 2001-04-24 | 2005-06-07 | Key Safety Systems, Inc. | Simplified modeling software interface and method |
| US6925193B2 (en) * | 2001-07-10 | 2005-08-02 | Eaton Corporation | Image processing system for dynamic suppression of airbags using multiple model likelihoods to infer three dimensional information |
| US6542802B2 (en) * | 2001-07-02 | 2003-04-01 | Delphi Technologies, Inc. | Vehicle occupant characterization method with rough road compensation |
| US7124007B2 (en) | 2001-07-10 | 2006-10-17 | Siemens Aktiengesellschaft | System for monitoring the interior of a vehicle |
| DE10163910A1 (de) * | 2001-12-22 | 2003-07-03 | Bosch Gmbh Robert | Vorrichtung zur Insassenklassifizierung und Verfahren zur Insassenklassifizierung |
| US7026946B2 (en) * | 2002-04-17 | 2006-04-11 | Darrel Saunders | Method and apparatus for sensing seat occupancy |
| US7046158B2 (en) * | 2002-04-17 | 2006-05-16 | Darrel Saunders | Method and apparatus for sensing seat occupancy |
| GB0211566D0 (en) * | 2002-05-21 | 2002-06-26 | Koninkl Philips Electronics Nv | Method and apparatus for providing travel relating information to a user |
| US6650978B1 (en) * | 2002-05-31 | 2003-11-18 | Delphi Technologies, Inc. | Method and apparatus for preserving calibration data in a vehicle seat occupant detection system |
| DE10239761B4 (de) * | 2002-08-29 | 2007-10-25 | Sartorius Ag | Verfahren und Vorrichtung zur Identifikation der Art der Belegung einer Auflagefläche |
| JP3922637B2 (ja) * | 2002-08-30 | 2007-05-30 | 本田技研工業株式会社 | サイドエアバッグシステム |
| ES2222784A1 (es) * | 2002-10-17 | 2005-02-01 | Proyectos Y Tecnologia Sallen, S.L. | Sistema para la deteccion de cargas. |
| US7177743B2 (en) * | 2003-06-02 | 2007-02-13 | Toyota Engineering & Manufacturing North America, Inc. | Vehicle control system having an adaptive controller |
| US7132953B2 (en) * | 2003-06-26 | 2006-11-07 | Lear Corporation | Spring sensor assembly for a vehicle seat cushion |
| US7075450B2 (en) * | 2003-06-26 | 2006-07-11 | Lear Corporation | Vehicle occupant sensing system having discrete wiring |
| US7172244B2 (en) * | 2003-06-26 | 2007-02-06 | Lear Corporation | Vehicle seat assembly having a vehicle occupant sensing system and a seat cushion insert positioned therein |
| US7063382B2 (en) * | 2003-06-26 | 2006-06-20 | Lear Corporation | Vehicle seat assembly having a vehicle occupant sensing system and a seat cushion insert |
| US7258398B2 (en) * | 2003-06-26 | 2007-08-21 | Lear Corporation | Vehicle occupant sensing system having an upper slide member with an emitter interference member |
| US6994397B2 (en) * | 2003-06-26 | 2006-02-07 | Lear Corporation | Vehicle occupant sensing system having sensor assemblies with variable blasing member |
| US7043997B2 (en) * | 2003-07-09 | 2006-05-16 | Cherry Corporation | Seat for sensing a load |
| US7035432B2 (en) * | 2003-07-22 | 2006-04-25 | Ronjo Company | Method of monitoring sleeping infant |
| US7239724B2 (en) * | 2003-07-22 | 2007-07-03 | International Business Machines Corporation | Security identification system and method |
| KR100513879B1 (ko) * | 2003-08-08 | 2005-09-09 | 현대자동차주식회사 | 조수석용 에어백의 전개압력 조절방법 |
| US7151452B2 (en) * | 2003-12-05 | 2006-12-19 | Elesys North America Inc. | Vehicle occupant sensing system |
| US6985077B2 (en) * | 2003-12-30 | 2006-01-10 | Lear Corporation | Method of tuning a sensor array for occupancy sensing in a vehicle seat |
| US7053759B2 (en) * | 2003-12-30 | 2006-05-30 | Lear Corporation | Method of determining an equivalent value for a failed sensor in a vehicle seat having an occupancy sensing system |
| US6901322B1 (en) | 2003-12-30 | 2005-05-31 | Lear Corporation | Method of predicting an empty seat condition in an occupancy sensing system |
| US7059029B2 (en) | 2003-12-30 | 2006-06-13 | Lear Corporation | Method of testing a sensor array incorporated into a vehicle seat |
| US7034670B2 (en) * | 2003-12-30 | 2006-04-25 | Lear Corporation | Method of occupancy classification in a vehicle seat |
| US7185916B2 (en) * | 2004-01-14 | 2007-03-06 | Lear Corporation | Vehicle seat assembly having a field effect sensor for detecting seat position |
| DE102004016185A1 (de) * | 2004-04-01 | 2005-10-20 | Volkswagen Ag | Verfahren zum Herstellen eines Bauteils für ein Kraftfahrzeug |
| DE102004018288A1 (de) * | 2004-04-15 | 2005-11-03 | Conti Temic Microelectronic Gmbh | Verfahren und Vorrichtung zur näherungsweisen Indentifizierung eines Objekts |
| US7224270B2 (en) * | 2004-06-07 | 2007-05-29 | Delphi Technologies, Inc. | Child seat and monitoring system |
| US7225067B2 (en) * | 2004-07-02 | 2007-05-29 | Lear Corporation | Vehicle occupant sensing system for a vehicle seat assembly and method of operating the same |
| JP2006023868A (ja) * | 2004-07-07 | 2006-01-26 | Toshiba Corp | 解探索装置及びその初期値設定方法 |
| EP1778523B1 (en) * | 2004-07-29 | 2008-05-07 | IEE INTERNATIONAL ELECTRONICS & ENGINEERING S.A. | Seat sensor system |
| EP1778520B1 (en) * | 2004-08-09 | 2015-08-05 | Delphi Technologies Inc. | Child restraint system comprising event data recorder, and method for providing data relating to installation or adjustment |
| US7410212B2 (en) * | 2004-09-08 | 2008-08-12 | Delphi Technologies, Inc. | Child restraint system |
| US7365278B2 (en) * | 2004-10-27 | 2008-04-29 | Lear Corporation | Vehicle occupant sensing system having a contamination barrier member |
| US7405370B2 (en) * | 2004-10-27 | 2008-07-29 | Lear Corporation | Vehicle occupant sensing system having enclosed sensor assembly |
| US20060097497A1 (en) * | 2004-10-27 | 2006-05-11 | Sallam Faisal K | Vehicle occupant sensing system having a contamination barrier member |
| US7428942B2 (en) * | 2004-10-27 | 2008-09-30 | Lear Corporation | Vehicle occupant sensing system having guiding ribs |
| US7100980B2 (en) * | 2004-10-27 | 2006-09-05 | Lear Corporation | Vehicle seat assembly having a vehicle occupant sensing system with a biasing pad |
| US7402769B2 (en) * | 2004-10-27 | 2008-07-22 | Lear Corporation | Vehicle occupant sensing system having a retention member for a biasing member |
| US20060273897A1 (en) * | 2005-06-03 | 2006-12-07 | Risi Alan | Dynamic software system for a security checkpoint |
| US7505841B2 (en) * | 2005-09-02 | 2009-03-17 | Delphi Technologies, Inc. | Vision-based occupant classification method and system for controlling airbag deployment in a vehicle restraint system |
| US20070285218A1 (en) * | 2006-06-09 | 2007-12-13 | 3M Innovative Properties Company | Occupant abandonment sensor for automotive vehicles |
| US7656169B2 (en) * | 2007-02-06 | 2010-02-02 | Iee International Electronics & Engineering S.A. | Capacitive occupant detection system |
| BRPI0808506A2 (pt) * | 2007-03-07 | 2014-11-04 | Kmt Robotic Solutions Inc | Métodos para executar uma operação de fabricação em uma peça de trabalho usando uma montagem robótica, e usando uma montagem de braço robótico. |
| US7995816B2 (en) * | 2007-09-24 | 2011-08-09 | Baxter International Inc. | Detecting access disconnect by pattern recognition |
| US8384399B2 (en) | 2008-08-28 | 2013-02-26 | Infineon Technologies Ag | System including capacitively coupled electrodes and circuits in a network |
| US20100191390A1 (en) * | 2009-01-28 | 2010-07-29 | Delphi Technologies, Inc. | System and method for detecting the occupancy of a vehicle seat |
| FR2943236A1 (fr) * | 2009-03-18 | 2010-09-24 | Imra Europ Sas | Procede de surveillance d'un parametre biologique d'une personne au moyen de capteurs |
| US20100304762A1 (en) * | 2009-05-27 | 2010-12-02 | Bernard Joseph Hall | Indoor tracking system |
| US20110190980A1 (en) * | 2010-02-04 | 2011-08-04 | Delphi Technologies, Inc. | Occupant detection system and method |
| US20110190987A1 (en) * | 2010-02-04 | 2011-08-04 | Delphi Technologies, Inc. | Occupant detection system and method |
| US11540744B1 (en) | 2013-01-19 | 2023-01-03 | Bertec Corporation | Force measurement system |
| US11857331B1 (en) | 2013-01-19 | 2024-01-02 | Bertec Corporation | Force measurement system |
| US11052288B1 (en) * | 2013-01-19 | 2021-07-06 | Bertec Corporation | Force measurement system |
| US11311209B1 (en) | 2013-01-19 | 2022-04-26 | Bertec Corporation | Force measurement system and a motion base used therein |
| US9518860B2 (en) * | 2013-01-31 | 2016-12-13 | Apm Automation Solutions Ltd | System and method for fuzzy logic based measurement of a content of a bin |
| US9440608B2 (en) * | 2013-03-13 | 2016-09-13 | Aisin Seiki Kabushiki Kaisha | Seat occupant determining apparatus |
| US9651649B1 (en) * | 2013-03-14 | 2017-05-16 | The Trustees Of The Stevens Institute Of Technology | Passive acoustic detection, tracking and classification system and method |
| CN105122009B (zh) * | 2013-03-19 | 2017-09-15 | 巴鲁夫公司 | 电感式位移测量传感器和用于操作所述传感器的方法 |
| EP2808693B1 (en) * | 2013-05-27 | 2019-08-14 | Volvo Car Corporation | System and method for determining a position of a living being in a vehicle |
| US9193359B2 (en) * | 2013-08-12 | 2015-11-24 | GM Global Technology Operations LLC | Vehicle systems and methods for identifying a driver |
| US10542961B2 (en) | 2015-06-15 | 2020-01-28 | The Research Foundation For The State University Of New York | System and method for infrasonic cardiac monitoring |
| DE102015213995A1 (de) * | 2015-07-24 | 2017-01-26 | Ford Global Technologies, Llc | Vorrichtung und Verfahren zur Anpassung wenigstens einer von einer in einem Fahrzeugsitz sitzenden Person wahrnehmbaren Sitzkomforteigenschaft |
| CN106897310B (zh) * | 2015-12-18 | 2020-04-17 | 英业达科技有限公司 | 车辆个人化配置调整系统及其方法 |
| JP2019528501A (ja) * | 2016-06-29 | 2019-10-10 | シーイング マシーンズ リミテッド | マルチカメラシステムにおけるカメラ位置合わせ |
| US10676058B2 (en) | 2016-07-06 | 2020-06-09 | Ford Global Technologies, Llc | Vehicle dashboard safety features |
| WO2018076367A1 (zh) * | 2016-10-31 | 2018-05-03 | 深圳市大疆创新科技有限公司 | 一种杆量控制的方法、装置及相关设备 |
| CN107766805A (zh) | 2017-09-29 | 2018-03-06 | 阿里巴巴集团控股有限公司 | 提升车辆定损图像识别结果的方法、装置及服务器 |
| US11180154B2 (en) | 2017-10-17 | 2021-11-23 | The Regents Of The University Of Michigan | Fingerprinting drivers based on vehicle turns |
| CN107562213A (zh) * | 2017-10-27 | 2018-01-09 | 网易(杭州)网络有限公司 | 视疲劳状态的检测方法、装置以及头戴式可视设备 |
| KR102567188B1 (ko) | 2017-12-20 | 2023-08-16 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| US11925446B2 (en) * | 2018-02-22 | 2024-03-12 | Vayyar Imaging Ltd. | Radar-based classification of vehicle occupants |
| CN108482302B (zh) * | 2018-03-09 | 2020-08-04 | 北京汽车股份有限公司 | 安全带状态提醒系统和提醒控制方法以及车辆 |
| US10726310B2 (en) * | 2018-03-31 | 2020-07-28 | Veoneer Us Inc. | Deployment zone definition and associated restraint control |
| US11230293B2 (en) * | 2018-06-11 | 2022-01-25 | Iee International Electronics & Engineering S.A. | Method for robust vehicle occupancy detection with vital sign monitoring |
| EP3581440A1 (en) * | 2018-06-11 | 2019-12-18 | Volvo Car Corporation | Method and system for controlling a state of an occupant protection feature for a vehicle |
| CN111422200B (zh) * | 2019-01-09 | 2022-02-08 | 北京地平线机器人技术研发有限公司 | 调节车辆设备的方法、装置及电子设备 |
| DE102019204157A1 (de) * | 2019-03-26 | 2020-10-01 | Brose Fahrzeugteile Se & Co. Kommanditgesellschaft, Bamberg | Verfahren zur Innenraumüberwachung eines Fahrzeugs, Überwachungsanordnung und Fahrzeug |
| CN114868036A (zh) * | 2020-06-18 | 2022-08-05 | 松下电器(美国)知识产权公司 | 就座检测装置、就座检测方法及程序 |
| CN111942284A (zh) * | 2020-07-06 | 2020-11-17 | 山东师范大学 | 一种车内人员遗留检测与报警系统及方法 |
| CN112193251B (zh) * | 2020-10-13 | 2022-04-05 | 一汽解放汽车有限公司 | 一种驾驶人员的驾姿反馈系统和方法 |
| DE102022126044A1 (de) | 2022-10-10 | 2024-04-25 | HELLA GmbH & Co. KGaA | Verfahren zum Betreib einer Steuereinrichtung, Steuereinrichtung und Fahrzeug |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3275975A (en) | 1964-12-21 | 1966-09-27 | Cleveland Technical Ct Inc | Ultrasonic detecting means |
| US5829782A (en) | 1993-03-31 | 1998-11-03 | Automotive Technologies International, Inc. | Vehicle interior identification and monitoring system |
| US5845000A (en) | 1992-05-05 | 1998-12-01 | Automotive Technologies International, Inc. | Optical identification and monitoring system using pattern recognition for use with vehicles |
| US4810100A (en) * | 1982-07-19 | 1989-03-07 | Honeywell Inc. | Ultrasonic energy transfer sensing system |
| JPS6060838A (ja) | 1983-09-13 | 1985-04-08 | 富士通株式会社 | 超音波音場観測装置 |
| US4881270A (en) | 1983-10-28 | 1989-11-14 | The United States Of America As Represented By The Secretary Of The Navy | Automatic classification of images |
| US4906940A (en) | 1987-08-24 | 1990-03-06 | Science Applications International Corporation | Process and apparatus for the automatic detection and extraction of features in images and displays |
| JPH01158579A (ja) | 1987-09-09 | 1989-06-21 | Aisin Seiki Co Ltd | 像認識装置 |
| US5074583A (en) | 1988-07-29 | 1991-12-24 | Mazda Motor Corporation | Air bag system for automobile |
| JP2878409B2 (ja) | 1989-09-04 | 1999-04-05 | 株式会社リコー | 3次元物体撮像方式 |
| US5071160A (en) | 1989-10-02 | 1991-12-10 | Automotive Systems Laboratory, Inc. | Passenger out-of-position sensor |
| DE4005598C2 (de) | 1990-02-22 | 2000-06-15 | Bosch Gmbh Robert | Schutzverfahren für Fahrzeuginsassen und Einrichtung zur Durchführung des Verfahrens |
| JP2605922B2 (ja) | 1990-04-18 | 1997-04-30 | 日産自動車株式会社 | 車両用安全装置 |
| US5214744A (en) | 1990-12-14 | 1993-05-25 | Westinghouse Electric Corp. | Method and apparatus for automatically identifying targets in sonar images |
| US5181254A (en) | 1990-12-14 | 1993-01-19 | Westinghouse Electric Corp. | Method for automatically identifying targets in sonar images |
| US5684701A (en) | 1995-06-07 | 1997-11-04 | Automotive Technologies International, Inc. | Method and apparatus for sensing a vehicle crash |
| US5305012A (en) | 1992-04-15 | 1994-04-19 | Reveo, Inc. | Intelligent electro-optical system and method for automatic glare reduction |
| US6078854A (en) * | 1995-06-07 | 2000-06-20 | Automotive Technologies International, Inc. | Apparatus and method for adjusting a vehicle component |
| US6081757A (en) * | 1995-06-07 | 2000-06-27 | Automotive Technologies International, Inc. | Seated-state detecting apparatus |
| US5943295A (en) | 1997-02-06 | 1999-08-24 | Automotive Technologies International Inc. | Method for identifying the presence and orientation of an object in a vehicle |
| US5235339A (en) | 1992-11-13 | 1993-08-10 | The United States Of America As Represented By The Secretary Of The Navy | Radar target discrimination systems using artificial neural network topology |
| US5330226A (en) | 1992-12-04 | 1994-07-19 | Trw Vehicle Safety Systems Inc. | Method and apparatus for detecting an out of position occupant |
| US5298732A (en) | 1993-02-18 | 1994-03-29 | Emee, Inc. | Automatic visor for continuously repositioning a shading object to shade a designated location from a direct radiation source |
| JPH09501120A (ja) | 1993-03-31 | 1997-02-04 | オートモーティブ・テクノロジーズ・インターナショナル・インク | 車両内乗員の位置・速度センサ |
| US5446661A (en) | 1993-04-15 | 1995-08-29 | Automotive Systems Laboratory, Inc. | Adjustable crash discrimination system with occupant position detection |
| US5390136A (en) | 1993-06-14 | 1995-02-14 | Motorola, Inc. | Artificial neuron and method of using same |
| US5366241A (en) | 1993-09-30 | 1994-11-22 | Kithil Philip W | Automobile air bag system |
| US5605348A (en) | 1993-11-03 | 1997-02-25 | Trw Vehicle Safety Systems Inc. | Method and apparatus for sensing a rearward facing child seat |
| US5454591A (en) | 1993-11-03 | 1995-10-03 | Trw Vehicle Safety Systems Inc. | Method and apparatus for sensing a rearward facing child restraining seat |
| US5626359A (en) | 1993-12-02 | 1997-05-06 | Trw Vehicle Safety Systems, Inc. | Method and apparatus for controlling an actuatable restraining device in response to discrete control zones |
| US5413378A (en) | 1993-12-02 | 1995-05-09 | Trw Vehicle Safety Systems Inc. | Method and apparatus for controlling an actuatable restraining device in response to discrete control zones |
| JPH07196006A (ja) | 1993-12-29 | 1995-08-01 | Sensor Technol Kk | 助手席用乗員検知システム |
| DE4400664C2 (de) | 1994-01-12 | 1995-11-16 | Spies Martin Dipl Ing Fh | Vorrichtung zur Erkennung der Sitzbelegung in Fahrzeugen etc. |
| US5482314A (en) * | 1994-04-12 | 1996-01-09 | Aerojet General Corporation | Automotive occupant sensor system and method of operation by sensor fusion |
| US5602734A (en) | 1994-09-23 | 1997-02-11 | Advanced Safety Concepts, Inc. | Automobile air bag systems |
| JP3494769B2 (ja) | 1994-12-20 | 2004-02-09 | 株式会社東海理化電機製作所 | 助手席又は後席用エアバッグ装置 |
| JP2973863B2 (ja) | 1995-03-31 | 1999-11-08 | トヨタ自動車株式会社 | 助手席用エアバッグ装置 |
| US5722686A (en) | 1995-05-16 | 1998-03-03 | Trw Vehicle Safety Systems, Inc. | Method and apparatus for sensing an occupant position using capacitance sensing |
| US5782482A (en) | 1996-01-30 | 1998-07-21 | K-2 Corporation | Snowboard and method of construction |
| US6007095A (en) | 1997-02-05 | 1999-12-28 | Automotive Systems Laboratory, Inc. | Vehicle occupant position sensor |
| US5954360A (en) | 1997-09-18 | 1999-09-21 | Breed Automotive Technology, Inc. | Vehicle occupant sensing apparatus and method |
-
1999
- 1999-12-29 US US09/474,147 patent/US6397136B1/en not_active Expired - Fee Related
-
2000
- 2000-05-30 JP JP2001519213A patent/JP2004522932A/ja not_active Withdrawn
- 2000-05-30 DE DE10084638T patent/DE10084638T1/de not_active Withdrawn
- 2000-05-30 WO PCT/US2000/014903 patent/WO2001014910A2/en active Application Filing
-
2001
- 2001-01-24 SE SE0100186A patent/SE523753C2/sv unknown
- 2001-02-09 US US09/780,654 patent/US6459973B1/en not_active Expired - Fee Related
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002347498A (ja) * | 2001-03-02 | 2002-12-04 | Nec Technologies Inc | エアバッグ展開制御のための多重センサビークル搭乗者検出システム及び方法 |
| JP2008302930A (ja) * | 2001-03-02 | 2008-12-18 | Elesys North America Inc | エアバッグ展開制御のための多重センサビークル搭乗者検出システム及び方法 |
| JP4721608B2 (ja) * | 2001-03-02 | 2011-07-13 | エレシス ノース アメリカ インコーポレイテッド | エアバッグ展開制御のための多重センサビークル搭乗者検出システム及び方法 |
| JP2018512334A (ja) * | 2015-04-10 | 2018-05-17 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | 車内カメラによる乗員の寸法及び姿勢の検出 |
| US10829072B2 (en) | 2015-04-10 | 2020-11-10 | Robert Bosch Gmbh | Detection of occupant size and pose with a vehicle interior camera |
| KR20190055313A (ko) * | 2017-11-15 | 2019-05-23 | 주식회사 서연전자 | 탑승자 감지 장치 및 그 방법 |
| KR102016149B1 (ko) * | 2017-11-15 | 2019-08-29 | 주식회사 서연전자 | 탑승자 감지 장치 및 그 방법 |
| WO2022239195A1 (ja) * | 2021-05-13 | 2022-11-17 | 三菱電機株式会社 | 車両乗員検知システム及び車両乗員検知方法 |
| JP7450811B2 (ja) | 2021-05-13 | 2024-03-15 | 三菱電機株式会社 | 車両乗員検知システム及び車両乗員検知方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2001014910A2 (en) | 2001-03-01 |
| SE0100186L (sv) | 2001-03-27 |
| SE0100186D0 (sv) | 2001-01-24 |
| US6459973B1 (en) | 2002-10-01 |
| WO2001014910A3 (en) | 2001-09-27 |
| US20020082756A1 (en) | 2002-06-27 |
| SE523753C2 (sv) | 2004-05-11 |
| DE10084638T1 (de) | 2002-05-02 |
| US6397136B1 (en) | 2002-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004522932A (ja) | 車両内の物体の存在及び姿勢を識別するシステムを開発する方法 | |
| US6445988B1 (en) | System for determining the occupancy state of a seat in a vehicle and controlling a component based thereon | |
| US6452870B1 (en) | Methods for controlling deployment of an occupant restraint in a vehicle and determining whether the occupant is a child seat | |
| US6529809B1 (en) | Method of developing a system for identifying the presence and orientation of an object in a vehicle | |
| US6757602B2 (en) | System for determining the occupancy state of a seat in a vehicle and controlling a component based thereon | |
| US5943295A (en) | Method for identifying the presence and orientation of an object in a vehicle | |
| US7620521B2 (en) | Dynamic weight sensing and classification of vehicular occupants | |
| US7712777B2 (en) | Airbag deployment control based on contact with occupant | |
| US7779956B2 (en) | Vehicular seats with weight sensing capability | |
| US7900736B2 (en) | Vehicular seats with fluid-containing weight sensing system | |
| US7762582B2 (en) | Vehicle component control based on occupant morphology | |
| USRE37260E1 (en) | Method for identifying the presence and orientation of an object in a vehicle | |
| US7359527B2 (en) | Combined occupant weight and spatial sensing in a vehicle | |
| US7147246B2 (en) | Method for airbag inflation control | |
| US7770920B2 (en) | Vehicular seats with fluid-containing weight sensing system | |
| US7650212B2 (en) | Pedal adjustment system and method | |
| US8820782B2 (en) | Arrangement for sensing weight of an occupying item in vehicular seat | |
| US7976060B2 (en) | Seat load or displacement measuring system for occupant restraint system control | |
| US7523803B2 (en) | Weight determining systems and methods for vehicular seats | |
| US20070132220A1 (en) | Occupant Classification and Airbag Deployment Suppression Based on Weight | |
| US7575248B2 (en) | Airbag inflation control based on sensed contact with occupant | |
| US20060217864A1 (en) | Weight Measuring Systems and Methods for Vehicles | |
| US20080189053A1 (en) | Apparatus and Method for Analyzing Weight of an Occupying Item of a Vehicular Seat | |
| Breed et al. | Development of an occupant position sensor system to improve frontal crash protection |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A072 | Dismissal of procedure [no reply to invitation to correct request for examination] |
Free format text: JAPANESE INTERMEDIATE CODE: A072 Effective date: 20040803 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070530 |
|
| A524 | Written submission of copy of amendment under section 19 (pct) |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20090317 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20090415 |