JP2004267953A - 汚泥掻寄機 - Google Patents
汚泥掻寄機 Download PDFInfo
- Publication number
- JP2004267953A JP2004267953A JP2003064457A JP2003064457A JP2004267953A JP 2004267953 A JP2004267953 A JP 2004267953A JP 2003064457 A JP2003064457 A JP 2003064457A JP 2003064457 A JP2003064457 A JP 2003064457A JP 2004267953 A JP2004267953 A JP 2004267953A
- Authority
- JP
- Japan
- Prior art keywords
- speed
- sludge
- low
- rack
- scraper
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000010802 sludge Substances 0.000 title claims abstract description 149
- 238000007790 scraping Methods 0.000 claims abstract description 55
- 239000010865 sewage Substances 0.000 claims abstract description 36
- 230000007246 mechanism Effects 0.000 claims abstract description 12
- 230000009347 mechanical transmission Effects 0.000 claims description 7
- 230000033001 locomotion Effects 0.000 abstract description 12
- 238000010586 diagram Methods 0.000 abstract 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 11
- 230000010006 flight Effects 0.000 description 3
- 238000011144 upstream manufacturing Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- 239000013049 sediment Substances 0.000 description 1
- 238000004062 sedimentation Methods 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 239000002351 wastewater Substances 0.000 description 1
- 238000004065 wastewater treatment Methods 0.000 description 1
Images





Landscapes
- Removal Of Floating Material (AREA)
Abstract
【解決手段】汚水処理槽1の槽底11に沿って往復移動し汚泥を掻寄せるように配設した汚泥掻寄装置4と、この汚泥掻寄装置4を吊垂支持し、かつその移動方向に応じて上下させつつ往復移動するようにした駆動装置5とからなる汚泥掻寄機において、駆動装置5を、ループ状ガイドレール5Aと、このガイドレール5Aに沿って周回移動する駆動体5Bとより構成し、軽負荷時高速移動するよう移動速度を変換できるようにした機械式変速機構52、53を備える。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、汚泥掻寄機に関し、特に、槽底に沿って移動して汚泥を掻き寄せる汚泥掻寄装置を、前後進運動によりその吊垂支持の高さ及び移動速度を機械式に切り替えて、沈澱汚泥の掻き寄せ効率を向上するようにした汚泥掻寄機に関するものである。
【0002】
【従来の技術】
従来、汚泥掻寄機(沈砂を対象とする沈砂掻寄機、除塵機を含み、本明細書において、単に、「汚泥掻寄機」という。)は、一般には、図6に示すように、片端に沈降した汚泥を掻き集めて一時貯留する汚泥ピットPを備えた汚水処理槽1内に、槽底11及び水面に沿って移動するエンドレス状のチェンCを張架し、このチェンCに所定間隔でスクレーパSを取り付け、モータMを駆動することにより、チェンCを循環駆動し、往路側の槽底に摺接する位置にあるスクレーパSによって、槽底に沈降した汚泥を掻き寄せ、汚泥ピットP内に集泥するとともに、復路側の水面位置にあるスクレーパSによって、水面に浮遊するスカムを掻き寄せ、スカムスキマKを介して排出するようにしている。
なお、汚泥ピットP内に集泥された汚泥は、汚泥引抜管2にて汚水処理槽1外に引き抜き、排出するようにしている。
【0003】
ところで、従来のエンドレスチェン式の汚泥掻寄機は、汚水中にエンドレス状のチェンCを張架し、チェンCを循環駆動し、往路側の槽底に摺接する位置にあるスクレーパSによって、沈降した汚泥を掻き寄せる構造のため、チェンC及びチェンCを張架するためのスプロケットホイルW等の駆動部が、必然的に汚水中に位置することとなり、汚泥等の混入した汚水と接触することによって、駆動部が摩耗したり、腐食し、装置の耐久性が低く、チェンC及びスプロケットホイルW等の駆動部のメンテナンスに時間と費用がかかるという問題があった。
【0004】
このエンドレスチェン式の汚泥掻寄機の問題点を改善するために、図4,図5に示すように、汚水処理槽の槽底に沿って往復移動及び昇降動作とを組み合わせた往復運動を行わせ、汚泥を掻寄せるようにした汚泥掻寄装置を、水面上に設置した駆動装置にて吊垂支持してなる汚泥掻寄機が提案されている。
ところで、往復移動式汚泥掻寄機は、下部に多数のフライトを備えた汚泥掻寄装置を、汚泥を掻き寄せる負荷時には、槽底に沿うよう降下させて前進させ、また後退する軽負荷時には槽底にフライトが近接しないよう上昇させ、槽底に沿って後退移動するようにしている。
【0005】
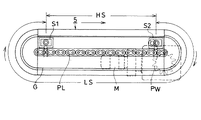
また、汚泥掻き寄せ時には、フライトにて槽底の汚泥を水中に舞い上がることなく掻き寄せられるよう低速で移動し、軽負荷の後退時には汚泥掻き寄せ効率を向上させるため、掻き寄せ時よりも高速で後退するようにしている。この汚泥掻寄装置の前進時低速に、後退時高速で移動するよう駆動装置5モータMを、高速低速の切替位置に配設した位置検出センサーS1,S2にて駆動装置5の位置を検出し、この信号をインバータに入力し、周波数を変更してモータMの回転数を制御し、ガイドレールGに沿って配設されたピンラックPLに噛合したピンホイルPWの回転数を制御して駆動速度を切り替えるようにしている。
【0006】
【発明が解決しようとする課題】
ところが、従来の往復移動式汚泥掻寄機は、汚泥掻き寄せ効率を向上させるため、汚泥掻き寄せの前進時と後退時との駆動速度の切替を、位置検出センサー及びインバータ付のモータとにより行っているため、インバータの特性上使用環境によってその寿命が大きく左右されるので、一定の環境を保持するための設備が必要となり、またインバータの長寿命化のための部品点数が増しため、設備費が高価になるという問題があった。
【0007】
本発明は、上記従来の汚泥掻寄機の有する問題点に鑑み、汚泥掻寄機の前進時と後退時との駆動速度の切替を、インバータを使用せず、機械的に行い、信頼性の向上と設備費の低廉化を図れるようにした汚泥掻寄機を提供することを目的とする。
【0008】
【課題を解決するための手段】
上記目的を達成するため、本発明の汚泥掻寄機は、汚水処理槽の槽底に沿って往復移動し汚泥を掻寄せるように配設した汚泥掻寄装置と、該汚泥掻寄装置を吊垂支持し、かつその移動方向に応じて上下させつつ往復移動するようにした駆動装置とからなる汚泥掻寄機において、駆動装置を、ループ状ガイドレールと、該ガイドレールに沿って周回移動する駆動体とより構成し、軽負荷時高速移動するよう移動速度を変換できるようにした機械式変速機構を備えたことを特徴とする。
【0009】
この汚泥掻寄機は、ガイドレールに沿って周回移動する駆動体を、機械式変速機構にて軽負荷時高速移動するよう移動速度を変換できるようにしているため、インバータを用いることないので使用環境に左右されることなく、またモータの回転数を制御することもなく機械的に変速することができるので、機構を簡単にして変速制御が確実となり、信頼性を向上することができる。
【0010】
この場合において、機械式変速機構を、駆動体のモータにて駆動される駆動軸に異径とした低速用歯車と高速用歯車とを同軸上に取り付け、前記低速用歯車及び高速用歯車とそれぞれ噛合するように低速用ラックと高速用ラックとをガイドレールに沿い、かつ低速用、高速用両ラック間を、異径状の低速用、高速用両歯車が円滑に乗り移り、速度を切り替えられるように配設して構成することができる。
【0011】
これにより、駆動軸に同軸上に取り付け、異径とした低速用歯車と高速用歯車とを、それぞれガイドレールに沿って配設した低速用ラックと高速用ラックとに噛合するようにしているため、駆動体をガイドレールに沿って移動させるだけで、予め定められた位置に来た時、ラックと噛合する歯車が円滑に乗り移るようにして自動的に切り替わり、速度が確実に変更されるから、機構を簡単にして変速制御が確実となり、信頼性を向上することができる。
【0012】
また、この場合において、低速用ラックを、低速用歯車と噛合するピンラック式とし、往復移動する汚泥掻寄装置の汚泥掻き寄せストローク長となるようにその全長を定めることができる。
【0013】
これにより、低速用ラックの長さを代えることにより、低速移動区間である汚泥掻寄装置の汚泥掻き寄せストローク長を簡単に変更することができる。
【0014】
また、この場合において、低速用ラックの両端を、該低速用ラックと噛合する低速用歯車が、低速用ラックの両端位置にて反転移動可能なように湾曲させることができる。
【0015】
これにより、低速用ラックの両端部を湾曲させているから、低速用ラックと噛合する低速用歯車が、低速用ラックの両端位置にきた時、この湾曲部に沿って移動するだけで自動的に確実に反転移動することができる。
【0016】
また、この場合において、高速用ラックを、高速用歯車と噛合するピンラック式とし、後退移動する汚泥掻寄装置の後退ストロークとなるようにその全長を定めることができる。
【0017】
これにより、高速用ラックの長さを代えることにより、高速移動区間である汚泥掻寄装置の後退ストローク長を簡単に変更することができる。
【0018】
【発明の実施の形態】
以下、本発明の汚泥掻寄機の実施の形態を図面に基づいて説明する。
【0019】
図1〜図4に、汚泥沈澱池、沈砂池等の汚水処理槽1に設置した本発明の汚泥掻寄機Aを示す。
汚水処理槽1には、その一端側から汚水が導入されるとともに、この汚水供給側の底部に汚泥引抜管2を有する汚泥ピットPを備える。
この汚水処理槽1の槽底11は、好ましくは、槽底11に沈降した汚泥が汚泥ピットPに流入し易いように、汚泥ピットP側が低くなるように傾斜して形成するようにする。
【0020】
また、汚水処理槽1には、汚水処理槽1に導入された汚水に含まれるスカム分が分離して浮遊する位置、例えば、汚水処理槽1のほぼ中央付近の水面にスカムスキマKを配設して、水面に浮遊するスカムを汚水処理槽1外に排出するとともに、スカムスキマKの後方の水面に複数の流出樋3を配設して、汚泥を沈降分離し、かつスカムを除去した後の汚水を汚水処理槽1外に排出するように構成する。
さらに、汚水処理槽1には、槽底11に沈降した汚泥を、掻き寄せ、汚泥ピットPに集泥する汚泥掻寄機Aを配置する。
【0021】
この汚泥掻寄機Aは、図1〜図4に示すように、汚水処理槽1の槽底11に沈降した汚泥を掻き寄せる汚泥掻寄装置4と、この汚泥掻寄装置4を吊垂支持して所定のストローク長Lで汚水処理槽1の長手方向に沿って往復移動させる水面上に設置した駆動装置5とからなる。
【0022】
汚泥掻寄装置4は、図5に示すように汚水処理槽1の槽底11、例えば、汚泥ピットPとストローク長Lを除いた槽底11の長手方向のほぼ全長に亘って、槽底11の幅方向の両端部に2本のビーム41を平行に配設し、この2本のビーム41間に掛け渡すようにして多数のフライト42を所定間隔で架設して構成する。
この汚泥掻寄装置4のビーム41は、その前部分を、フライト42が槽底11に接触して摺動しないように、駆動装置5から1本の吊りロッド又は逆V字形に配設した吊りロッド43を介して吊垂支持するようにするとともに、後部分は、槽底11に接触して移動するようにした移動体44にて支持し、かつ駆動装置5の駆動により前部分の前後進移動に追従して移動するようにする。
【0023】
なお、駆動装置5により、ビーム41が汚泥掻寄方向に前進移動する時は、ビーム41下面のフライト42が槽底11に接触もしくは槽底11から少しの隙間、具体的には、10mm程度の隙間をあけて移動し、反対方向に後退移動する時は、槽底11から高さHだけ持ち上げられて沈降汚泥を後方へ押し戻さないように槽底11より離れて移動するように構成する。
この持ち上げ高さHは、ループ状ガイドレール5Aの上ガイドレール51aと下ガイドレール51bとの間隔Hにより決定される。
【0024】
また、駆動装置5により汚泥掻寄装置4が前進駆動される汚泥掻き寄せ時は、沈澱汚泥の掻き寄せが過負荷にならないように低速で移動し、反対に後退移動する時には汚泥掻寄装置4は沈澱汚泥面より浮上しているので軽負荷又は無負荷となっているため、高速で移動するようにする。これにより、装置の大型化を防いで動力ロスをなくすことができる。
また、この汚泥掻寄装置4の前後進による移動速度の高速、低速の切替は、図1〜図3に示すように、駆動装置5に備えた機械式変速機構により自動的に、かつ機械的に、駆動装置5の移動方向により行うことができる。
【0025】
これにより、沈降する汚泥量が多く、さらに、汚泥掻寄装置4によって掻き寄せられることにより、汚泥の押し戻しを防ぐことができ、多量の汚泥が堆積する汚泥掻寄装置4のビーム41の往復移動を円滑に行うことができ、沈降した汚泥の汚泥ピット側への掻き寄せを、確実に、かつ、安定して、しかも、動力ロスを少なくして行うことができるものとなる。
【0026】
フライト42は、平行に配設した2本のビーム41,41間に、好ましくは、ストローク長Lと等しいか、ストローク長Lよりも少し短い所定の間隔で、略等間隔に互いに平行するように架設するとともに、汚泥掻寄方向、すなわち、汚泥ピットPに向けて前進移動する時は、汚泥を掻き寄せるように、反対方向に後退移動する時は、沈降した汚泥表面上を滑るように、前面及び背面の形状を異ならせて、より具体的には、前面が略鉛直面、背面が傾斜面、底面が槽底11に沿う断面直角三角形に形成して構成するようにする。
【0027】
駆動装置5は、図1〜図3に示すように、汚水処理槽1の中央部より前方、すなわち、汚泥ピットP側の水面上に設置した本体フレームFに取り付けたループ状ガイドレール5Aと、該ガイドレールに沿って周回移動するようにモータにて駆動される駆動軸に異径とした低速用歯車と高速用歯車とを同軸上に取り付けた駆動体5Bとより構成する。
ループ状ガイドレール5Aは、本体フレームFに、互いに対向するようにして取り付けた取付台50,50の内側に沿って扁平ループ形状を有するガイドレール51,51をそれぞれ取り付け、この各ガイドレール51,51の内周側に沿って、それぞれピンラック形状で1対とした低速用ラック52(ピンラック)と高速用ラック53(ピンラック)を配設して構成する。
【0028】
駆動体5Bは、ループ状ガイドレール5Aに沿って周回移動するようにモータ54にて駆動される駆動軸55に異径とした低速用歯車56と高速用歯車57及びガイドローラ58を同軸上に取り付けて構成し、ガイドローラ58が扁平ループ形状をしたガイドレール5Aに案内されて上ガイドレール51a、下ガイドレール51bに沿って周回移動(略矩形運動)する際、前記低速用歯車56及び高速用歯車57とそれぞれ噛合するように低速用ラック52と高速用ラック53とをガイドレール51に沿い、かつ低速用、高速用両ラック52,53間を、異径状の低速用、高速用両歯車56,57が円滑に乗り移るようにして配設する。
【0029】
なお、この場合、小径の低速用歯車56と噛合する低速用ラック52を、往復移動する汚泥掻寄装置の汚泥掻き寄せストローク長Lとなるようにその全長を定めるとともに、低速用ラック52の両端部52a,52aを、該低速用ラック52と噛合する低速用歯車56が、低速用ラック52の両端位置にて前進と後退との反転移動及び移動速度の高速低速の切替可能なように低速用ラック52の両端部52aは、低速用歯車56が周回し易いように、円弧状に湾曲形成する。この低速用ラック52の全長が、駆動体5Bが低速で移動する低速移動区間LSとなる。
また、高速用ラック53を、往復移動する汚泥掻寄装置の後退(リターン)ストロークとなるようにその全長を定めるとともに、前記低速用ラック52の円弧状に湾曲形成した両端部間で、かつ高速用歯車57と噛合する位置に配設する。
この高速用ラック53の全長が、駆動体5Bが高速で移動する高速移動区間HSとなる。
低速用ラック52及び高速用ラック53は、ガイドレール51に沿って多数のピンを等間隔に突設したピンラック形状とするが、このピンを等間隔に突設する代わりに、リンクチェーンを利用することができる。
【0030】
なお、扁平ループ形状としたガイドレール51の上ガイドレール51aと下ガイドレール51bの間隔Hは、汚泥掻寄装置4のビーム41の前部分のフライト42が、汚泥掻寄方向に前進移動する時は、槽底11にほぼ接するように移動し、反対方向に後退移動する時は、浮上して槽底11から充分離れて移動することができるように設定するようにする。
【0031】
また、汚水処理槽1の幅方向に対設したループ状ガイドレール5A,5Aに、それぞれ駆動体5B,5Bを嵌挿、支持し、対向する駆動体5B,5B間に1本の駆動軸55を掛け渡すようにして一体とし、この駆動軸55を、軸受(図示省略)を介して、パイプ状の駆動フレーム54により支持し、この駆動フレーム54にモータ又は減速機付モータを設置し、このモータを駆動することにより、駆動軸55を介して低速用歯車56及び高速用歯車57を同時に回転させて、ピンラック状の低速用ラック52又は高速用ラック53のいずれか一方と噛合させ、駆動体5B,5Bを、ガイドレール51に沿って周回移動するようにして、前進時低速で、後退時高速となるようその速度を切り替えて汚泥掻寄装置4を往復移動させるようにする。
【0032】
以下、この汚泥掻寄機の作用について説明する。
汚水処理槽1に流入した汚水は、汚水処理槽1の上流側から下流側へと流下する時、比重の大きい粒子は速く沈降するため、比重の大きい粒子から順次汚水処理槽1の上流側から下流側の槽底11に沈降する。
一方、スカム分は水面に浮遊し、スカムスキマにて除去し、このように汚泥分、スカム分が分離除去された汚水は、流出樋3から排出される。
槽底11に沈降する汚泥を、汚泥ピットP側へ掻き寄せ、集泥する汚泥掻寄装置4は、駆動装置5にて駆動されるが、この汚泥掻寄装置4の駆動は、連続的、あるいは汚泥の沈降量に追従して間欠的に行うことができ、これは汚水の流入量、汚泥の沈積量等に応じて適宜選択的に行うことができる。
【0033】
次に、汚泥掻寄装置4の駆動方法を説明する。
モータの駆動により駆動体5Bが、扁平ループ状のガイドレール51に導かれて周回移動するものとなる。
この駆動体5Bには、吊りロッド43を介して、汚泥掻寄装置4、すなわち、フライト42を配設したビーム41の前部分が吊垂支持され、またビームの後部分は移動体44にて槽底に対し摺動可能に支持されているので、駆動体5Bの移動距離に応じて、汚泥掻寄装置4のビーム41は、汚水処理槽1の長手方向にストローク長Lだけ移動する矩形運動を行うものとなる。
そして、この汚泥掻寄装置4の前後方向のストローク長Lを、好ましくは、フライト42を配設する間隔と等しいか、該間隔よりも長く設定することにより、汚泥掻寄装置4が往復移動を繰り返すことにより、槽底11に沈降した汚泥を、汚泥ピットP側へ確実に掻き寄せ、集泥することができる。
【0034】
この場合において、図1に示すように、駆動体5Bが低速用ラック52の端部位置で、低速用ラック52の最終のピンと低速用歯車56とが噛合している位置からさらにモータにて低速用歯車56が回転(このとき、高速用歯車57は空転)すると、低速用歯車56は低速用ラック52との噛合が外れることから低速用歯車56と低速用ラック52による駆動が解除されると同時に、次に高速用歯車57が高速用ラック53の始端部と噛合するようになり、高速で駆動体5Bがガイドレール51に沿って周回移動する。
このようにしてガイドレール51に沿って駆動体5Bが高速で後退移動し、高速用歯車57が高速用ラック53の終端部位置に来た時、高速用ラック53との噛合が解除されると、次に低速用歯車56が低速用ラック52と噛合するようになり、動力は低速用歯車56を介して伝達される。この場合、低速用歯車56と低速用ラック52との噛合により駆動体5Bは低速でガイドレール51に沿って周回移動するようになる。
【0035】
この駆動体5Bが高速でガイドレール51に沿って周回移動する場合は、ガイドローラ58にてガイドレール51の上ガイドレール51aに導かれるため、汚泥掻寄装置4のフライト付ビーム41は、汚水処理槽1の槽底11から少しの隙間、つまり高さHだけ吊り上げられた状態となって、汚水処理槽1の下流方向へ移動するものとなり、集泥することなく後退する。そして、駆動体5Bが高速で後退し、高速用ラック53の終端位置に達した後、高速用ラック53が高速用ラック53との噛合が解除され、次に低速用歯車56が低速用ラック52と噛合すると、駆動体5Bは低速でさらに周回移動するようになる。この場合、低速用ラック52の端部52aが湾曲しているため、低速用歯車56が低速用ラック52と噛合しつつ移動する際、駆動体5Bのガイドローラがループ状ガイドレール51の端屈曲部から下ガイドレール51bに導かれる。
【0036】
これにより、駆動体5Bは下ガイドレール51bの位置を周回するようになり、汚泥掻寄装置4のフライト付ビーム41は降下し、汚水処理槽1の槽底11にフライトが接するようになって汚水処理槽1の上流方向へ低速で移動する。このとき、汚水処理槽1の槽底11に沈降した汚泥の掻き寄せを、確実に、かつ、安定して行うことができるものとなる。
【0037】
そして、図1に示すように、駆動体5Bの低速用歯車56が低速用ラック52の湾曲した終端部52aに達した時、低速用歯車56は低速用ラック52との噛合より外れると同時に、次に高速用歯車57が高速用ラック53と噛合するようになる。このように駆動体5Bがループ状ガイドレール5Aに導かれて周回移動する際、ガイドレールの形状により矩形運動となり、汚泥掻寄装置4のフライト付ビーム41は昇降動作と、沈澱汚泥の掻き寄せ時には低速で、軽負荷の後退動作時には高速に自動的に、機械的に切り替えられつつ、これを順次繰り返し、所定の集泥を効率的に行うものである。
【0038】
【発明の効果】
本発明の汚泥掻寄機によれば、ガイドレールに沿って周回移動する駆動体を、機械式変速機構にて軽負荷時高速移動するよう移動速度を変換できるようにしているため、インバータを用いることないので使用環境に左右されることなく、またモータの回転数を制御することもなく機械的に変速することができるので、機構を簡単にして変速制御が確実となり、信頼性を向上することができる。
【0039】
また、駆動軸に同軸上に取り付け、異径とした低速用歯車と高速用歯車とを、それぞれガイドレールに沿って配設した低速用ラックと高速用ラックとに噛合するようにしているため、駆動体をガイドレールに沿って移動させるだけで、予め定められた位置に来た時、ラックと噛合する歯車が円滑に乗り移るようにして自動的に切り替わり、速度が確実に変更されるから、機構を簡単にして変速制御が確実となり、信頼性を向上することができる。
【0040】
また、低速用ラックを、低速用歯車と噛合するピンラック式とし、往復移動する汚泥掻寄装置の汚泥掻き寄せストローク長となるようにその全長を定めているから、低速用ラックの長さを代えることにより、汚泥掻寄装置の汚泥掻き寄せストローク長を簡単に変更することができる。
【0041】
また、低速用ラックの両端部を湾曲させているから、低速用ラックと噛合する低速用歯車が、低速用ラックの両端位置にきた時、この湾曲部に沿って移動するだけで自動的に確実に反転移動することができる。
【0042】
また、高速用ラックの長さを代えることにより、汚泥掻寄装置の後退ストローク長を簡単に変更することができる。
【図面の簡単な説明】
【図1】本発明の汚泥掻寄機の一実施例の駆動装置を示す側面図である。
【図2】駆動装置の正面図である。
【図3】駆動装置の平面図である。
【図4】本発明の汚泥掻寄機の全形を示す縦断正面図である。
【図5】従来の汚泥掻寄機の駆動装置を示す側面図である。
【図6】従来の汚泥掻寄機を示し、(A)は平面図、(B)は正面図である。
【符号の説明】
A 汚泥掻寄機
1 汚水処理槽
11 槽底
4 汚泥掻寄装置
41 ビーム
42 フライト
43 吊りロッド
44 移動体
5 駆動装置
5A ループ状ガイドレール
5B 駆動体
50 取付台
51 ガイドレール
52 低速用ラック
53 高速用ラック
54 駆動フレーム
55 駆動軸
56 低速用歯車
57 高速用歯車
58 ガイドローラ
Claims (5)
- 汚水処理槽の槽底に沿って往復移動し汚泥を掻寄せるように配設した汚泥掻寄装置と、該汚泥掻寄装置を吊垂支持し、かつその移動方向に応じて上下させつつ往復移動するようにした駆動装置とからなる汚泥掻寄機において、駆動装置を、ループ状ガイドレールと、該ガイドレールに沿って周回移動する駆動体とより構成し、軽負荷時高速移動するよう移動速度を変換できるようにした機械式変速機構を備えたことを特徴とする汚泥掻寄機。
- 機械式変速機構を、駆動体のモータにて駆動される駆動軸に異径とした低速用歯車と高速用歯車とを同軸上に取り付け、前記低速用歯車及び高速用歯車とそれぞれ噛合するように低速用ラックと高速用ラックとをガイドレールに沿い、かつ低速用、高速用両ラック間を、異径状の低速用、高速用両歯車が円滑に乗り移り、速度を切り替えられるように配設して構成したことを特徴とする請求項1記載の汚泥掻寄機。
- 低速用ラックを、低速用歯車と噛合するピンラック式とし、往復移動する汚泥掻寄装置の汚泥掻き寄せストローク長となるようにその全長を定めたことを特徴とする請求項1又は2記載の汚泥掻寄機。
- 低速用ラックの両端を、該低速用ラックと噛合する低速用歯車が、低速用ラックの両端位置にて反転移動可能なように湾曲させたことを特徴とする請求項1,2又は3記載の汚泥掻寄機。
- 高速用ラックを、高速用歯車と噛合するピンラック式とし、往復移動する汚泥掻寄装置の後退ストロークとなるようにその全長を定めたことを特徴とする請求項1又は2記載の汚泥掻寄機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003064457A JP4082588B2 (ja) | 2003-03-11 | 2003-03-11 | 汚泥掻寄機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003064457A JP4082588B2 (ja) | 2003-03-11 | 2003-03-11 | 汚泥掻寄機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004267953A true JP2004267953A (ja) | 2004-09-30 |
| JP4082588B2 JP4082588B2 (ja) | 2008-04-30 |
Family
ID=33125745
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003064457A Expired - Fee Related JP4082588B2 (ja) | 2003-03-11 | 2003-03-11 | 汚泥掻寄機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4082588B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004267954A (ja) * | 2003-03-11 | 2004-09-30 | Hitachi Kiden Kogyo Ltd | 汚泥掻寄機における変速機構 |
| JP2008073660A (ja) * | 2006-09-25 | 2008-04-03 | Hitachi Plant Technologies Ltd | 汚泥掻寄機 |
| CN116174388A (zh) * | 2023-05-04 | 2023-05-30 | 山西新辉活性炭有限公司 | 一种酸洗炭的生产设备及其生产方法 |
| CN118833991A (zh) * | 2024-09-21 | 2024-10-25 | 中城院(北京)环境科技股份有限公司 | 一种有机固废协同处理深度干化系统 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108815891A (zh) * | 2018-08-21 | 2018-11-16 | 江苏甬金金属科技有限公司 | 一种沉淀池刮泥机主轴箱 |
-
2003
- 2003-03-11 JP JP2003064457A patent/JP4082588B2/ja not_active Expired - Fee Related
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004267954A (ja) * | 2003-03-11 | 2004-09-30 | Hitachi Kiden Kogyo Ltd | 汚泥掻寄機における変速機構 |
| JP2008073660A (ja) * | 2006-09-25 | 2008-04-03 | Hitachi Plant Technologies Ltd | 汚泥掻寄機 |
| CN116174388A (zh) * | 2023-05-04 | 2023-05-30 | 山西新辉活性炭有限公司 | 一种酸洗炭的生产设备及其生产方法 |
| CN116174388B (zh) * | 2023-05-04 | 2023-07-07 | 山西新辉活性炭有限公司 | 一种酸洗炭的生产设备及其生产方法 |
| CN118833991A (zh) * | 2024-09-21 | 2024-10-25 | 中城院(北京)环境科技股份有限公司 | 一种有机固废协同处理深度干化系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4082588B2 (ja) | 2008-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR200494866Y1 (ko) | 직사각형 침전조 슬러지 제거 및 배출 장치 | |
| JPH09327691A (ja) | スカム掻き寄せ装置 | |
| JP2004267953A (ja) | 汚泥掻寄機 | |
| CN108591800B (zh) | 润滑系统及包括该润滑系统的抽油机 | |
| JP3338805B2 (ja) | 汚泥掻寄機 | |
| JP4397606B2 (ja) | 汚泥掻寄機 | |
| CN117263317B (zh) | 一种压力气动隔油池及其使用方法 | |
| CN118949494A (zh) | 一种污水处理用排泥装置 | |
| CN119176608A (zh) | 一种污水处理池的浮渣收集装置 | |
| JP3909539B2 (ja) | 汚泥掻寄機 | |
| JP2001145804A (ja) | 汚泥掻寄機 | |
| JP2006061876A (ja) | スカム掻寄機能付汚泥掻寄機 | |
| JP2003024711A (ja) | 沈澱汚泥の排泥装置 | |
| JP3330125B2 (ja) | 汚泥掻寄機 | |
| KR100377872B1 (ko) | 슬러지 스크레이퍼 | |
| JP4088614B2 (ja) | 汚泥回収装置 | |
| JP4240346B2 (ja) | スカム掻寄装置 | |
| JP3909562B2 (ja) | 汚泥掻寄機 | |
| JP3993866B2 (ja) | 汚泥等回収装置 | |
| JP4015575B2 (ja) | 汚泥掻寄機における変速機構 | |
| CN117401760B (zh) | 一种可吸附的气浮设备 | |
| KR200413347Y1 (ko) | 수중대차 | |
| JP2005028313A (ja) | スカム掻寄機 | |
| CN120919696B (zh) | 用于污水处理的往复式刮吸泥一体机 | |
| CN220485386U (zh) | 一种机械刮渣槽 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20051011 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A711 | Notification of change in applicant |
Effective date: 20060605 Free format text: JAPANESE INTERMEDIATE CODE: A712 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071127 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Effective date: 20080205 Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080207 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 3 Free format text: PAYMENT UNTIL: 20110222 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 3 Free format text: PAYMENT UNTIL: 20110222 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Year of fee payment: 4 Free format text: PAYMENT UNTIL: 20120222 |
|
| LAPS | Cancellation because of no payment of annual fees |