EP3901349B1 - Dispositif de commande du mouvement des aiguilles d'une aiguilleteuse, notamment elliptique, et aiguilleteuse comportant un tel dispositif - Google Patents
Dispositif de commande du mouvement des aiguilles d'une aiguilleteuse, notamment elliptique, et aiguilleteuse comportant un tel dispositif Download PDFInfo
- Publication number
- EP3901349B1 EP3901349B1 EP21169008.6A EP21169008A EP3901349B1 EP 3901349 B1 EP3901349 B1 EP 3901349B1 EP 21169008 A EP21169008 A EP 21169008A EP 3901349 B1 EP3901349 B1 EP 3901349B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- rod
- adjustment
- tie
- lever
- needles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000835 fiber Substances 0.000 description 9
- 229940082150 encore Drugs 0.000 description 5
- 238000005461 lubrication Methods 0.000 description 5
- 230000001276 controlling effect Effects 0.000 description 4
- 238000007789 sealing Methods 0.000 description 4
- 230000002349 favourable effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
Images







Classifications
-
- D—TEXTILES; PAPER
- D04—BRAIDING; LACE-MAKING; KNITTING; TRIMMINGS; NON-WOVEN FABRICS
- D04H—MAKING TEXTILE FABRICS, e.g. FROM FIBRES OR FILAMENTARY MATERIAL; FABRICS MADE BY SUCH PROCESSES OR APPARATUS, e.g. FELTS, NON-WOVEN FABRICS; COTTON-WOOL; WADDING ; NON-WOVEN FABRICS FROM STAPLE FIBRES, FILAMENTS OR YARNS, BONDED WITH AT LEAST ONE WEB-LIKE MATERIAL DURING THEIR CONSOLIDATION
- D04H18/00—Needling machines
- D04H18/02—Needling machines with needles
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06H—MARKING, INSPECTING, SEAMING OR SEVERING TEXTILE MATERIALS
- D06H5/00—Seaming textile materials
Definitions
- the present invention relates to a device for controlling the movement along a trajectory of the needles of a needling machine, in particular the component along the direction MD of the movement along an elliptical trajectory of the needles of a needling machine with elliptical movement, as well as to a needling machine, in particular an elliptical, comprising a control device of this kind.
- an elliptical needling machine for consolidating by needling a veil or a layer of fibers, in particular of nonwoven, comprises at least one needle board, in front of which the veil or the layer of fibers passes while moving in a direction of feed or machine direction or MD, and drive means configured to give the at least one needle board and/or the needles a back and forth movement in the direction perpendicular or substantially perpendicular to the plane of the web or of the veil so that the needles cross in one direction, then in the other, the veil or the web of fibers, having an elliptical trajectory.
- a device according to the preamble of claim 1 is known.
- drive means MD configured to impart to the needles and/or the needle board the MD component of their elliptical movement.
- Known MD drive means are complex in structure and take up a lot of space. We would like to have available a driving device with a simpler structure, which in particular allows its adjustment both on and off. In addition, in some cases, it is desired to place these drive means MD in a sealed casing, alongside the means for driving the boards in the longitudinal direction, and to do this a more compact structure is sought.
- a device for controlling the component in a given direction, for example the direction MD, of the movement along a given trajectory, for example elliptical, of the needles of a needling machine, for example an elliptical needling machine, intended to consolidate by needling a veil or a layer of fibres, in particular of nonwoven comprising at least one needle board having a field of needles and drive means configured to impart to the at least one needle board and/or to the needles a back and forth movement so that the needles have a given trajectory, for example elliptical, to cross in one direction, then in the other, the veil or the web of fibers which moves in front of them in one direction machine or feed MD to consolidate it, the control device being as defined in claim 1.
- said one given direction is the MD direction and said one given trajectory is elliptical
- the drive means comprising MD drive means configured to impart to the at least one board and/or to the needles the MD component of their elliptical motion.
- said one given direction is the vertical direction and said one given trajectory is rectilinear. The movement of the hands being back and forth in the vertical direction.
- the present invention also relates to a needling machine, in particular an elliptical, comprising a control device according to the invention.
- the needling machine comprises one or more columns to which one or more respective needle boards are connected, in particular in a tilting manner, longitudinal drive means being provided to impart to the or each column a movement of moves back and forth in a direction parallel to the longitudinal axis of the column, at least part of the or each column and the longitudinal drive means being housed in a sealed casing, in which the control device MD is also housed in the sealed housing.
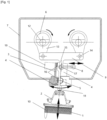
- FIG. 1 there is shown a first embodiment of a needling machine according to the invention.
- the housing is shown in a sectional view and the rest of the needling machine in a front view, part of the guide pot being cut away.
- This needling machine comprises a needle board 10 comprising needles 1 projecting from the underside of the board, being arranged either in rows and columns, or randomly or pseudo-randomly, as is well known in the field.
- the needle board 10 is carried by a beam 2, called the moving beam.
- the beam 2 and board 10 are integral with each other, but removably, to allow, when the needles are worn and/or broken, to easily replace a board with a new board.
- the needles are intended to have a back and forth movement with an elliptical trajectory from top to bottom and from bottom to top to cross in one direction, then in the other, a sheet or a veil of fibers which are made pass in front of them in a direction of lead or MD, namely from left to right in the horizontal direction to the figure.
- a longitudinal column 3 extending along a longitudinal axis 11 perpendicular to the plane of the board is secured to the movable beam 2, so that the movements of the column 3, of the movable beam 2, of the needle board 10 and of the hands are identical, namely with the same elliptical trajectory.
- Drive means are provided to impart to the column 3 (and therefore also to the needle board 10, to the movable beam 2 and to the needles 1) a movement having a component in a direction parallel to the longitudinal axis 11 and a component along the direction MD, so as to have an elliptical trajectory as shown in figure 1 by an ellipse for the hands.
- a sealed casing 7 encloses the drive means and part of the column 3, the latter passing through the wall of the casing 7 by passing through a guide pot 4, the interface of which with the casing 7 is sealed by means of a seal which according to one possible embodiment may take the form of a seal 50 with bellows.
- the guide pot 4 is mounted tilting with respect to an axis 5 fixed with respect to the housing 7, parallel to the direction CD (perpendicular to the direction MD and to the longitudinal axis 11).
- the column 3 can slide inside the guide pot 4.
- Guide rings 16 are arranged on the inner wall of the guide pot 4, to ensure sliding and lubrication between the column 3 and the guide pot 4. Sealing between column 3 and guide pot 4 is ensured by a gasket, not shown, attached to the base of the guide pot.
- the fixed axis 5 is positioned substantially at the level of the opening of the casing through which the guide pot 4 passes, in particular in the opening.
- the drive means comprise first longitudinal drive means configured to impart a reciprocating movement to the column in a direction parallel to the longitudinal axis.
- These first drive means consist of two systems 6 with eccentric shafts 12 and connecting rods 13 and an intermediate connecting rod 9.
- the shafts 12 drive the heads of the two connecting rods 13 by rotating (as represented by the two arrows at the top of the figure 1 ) in opposite directions.
- the feet 14 of the two connecting rods 13 are each articulated at one end of the intermediate connecting rod 9 which extends in the direction MD.
- the intermediate link 9 further comprises a lug 15 extending centrally downwards. The end of the leg 15 is hinged to the upper end of the column 3.
- These first longitudinal drive means make it possible to impart to the column 3 a movement only back and forth along the longitudinal axis.
- second transverse drive means in the form of a main rod 8 arranged in the direction MD.
- One end of the connecting rod 8 is mounted articulated to the guide pot 4, inside the casing 7, at a point 17 at a distance from the axis 5 of rotation of the pot, in particular substantially the upper end of the pot. It is thus imparted to the guide pot 4 a movement of oscillation back and forth which results on the column 3 which crosses it by a movement back and forth in the direction MD, or substantially in the direction MD (as represented by the double arrow above the link 8 at the figure 1 ).
- the other end of the link 8 is coupled to a control system, called the advance system, which is any one of those shown below in figure 5 , 6A , 6B And 7 .
- a mass 19 for balancing the system is coupled to the guide pot 4, being fixed to the latter on the side opposite that where the advance system is located.
- the advance system being housed in the sealed casing, it can be actuated either by an independent motor, or by one of the control shafts 6 of the first vertical drive means, or by a connecting rod mounted directly on an integral eccentric one of the control shafts 6 of the first drive means.
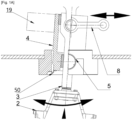
- FIG. 2 To the picture 2 , there is shown another embodiment of a needling machine according to the invention.
- the housing is shown in a sectional view and the rest of the needling machine in a front view, part of a guide pot being cut away.
- This needling machine comprises two needle boards 10' comprising needles 1' protruding from the underside of the board being arranged either in rows and columns, or randomly or pseudo-randomly, as is well known in the domain.
- Each needle board 10' is carried by a respective beam 2', called a moving beam.
- the needles are intended to have a back and forth movement with an elliptical trajectory from top to bottom and from bottom to top to cross in one direction, then in the other, a sheet or a veil of fibers which are made pass in front of it in a direction of lead or MD, namely from left to right in the horizontal direction to the figure.
- Two longitudinal columns 3' extend along longitudinal axes 11' perpendicular to the plane of the board.
- the columns 3' are each secured to a mobile beam 2', so that the movements of the column 3', of the beam 2 'mobile, the board 10' needles and needles are identical, namely with the same elliptical trajectory.
- Drive means are provided to impart to each column 3' (and therefore also to the boards 10' with needles, to the mobile beams 2' and to the needles 1) a movement having a component along a direction parallel to the longitudinal axis 11 'and a component in the direction MD, so as to have an elliptical trajectory as shown in figure 2 by an ellipse for the hands.
- a sealed casing 7' encloses the drive means and part of the columns 3', the latter passing through the wall of the casing 7' by passing through respective guide pots 4', the interfaces of which with the casing 7' are sealed by via seals (not shown, but which for example can be made in the form of bellows seals as shown in Figure 1A ).
- Each guide pot 4' is mounted tilting with respect to an axis 5', fixed with respect to the casing 7' and parallel to the direction CD (perpendicular to the direction MD and to the longitudinal axis 11').
- Each column 3' can slide inside the respective guide pot 4'.
- Guide rings 16' are arranged on the inner wall of each guide pot 4', to ensure sliding and lubrication between the column 3' and the respective guide pot 4'.
- the seal between the column 3' and the respective guide pot 4' is ensured by a seal, not shown, fixed to the base of the guide pot.
- the drive means comprise first longitudinal drive means configured to impart a reciprocating movement to each column in a direction parallel to the longitudinal axis.
- These first drive means consist of two systems 6' with eccentric shafts 12' and connecting rods 13'.
- the shafts 12' drive the heads of the two connecting rods 13' by rotating (as represented by the two arrows at the top of the figure 1 ) in opposite directions.
- the feet 14' of the two connecting rods 13' are each articulated at one end of a respective column 3'.
- These first vertical longitudinal drive means make it possible to impart to each column 3' a back-and-forth movement in a direction mainly parallel to the longitudinal axis.
- Second transverse drive means are also provided in the form of a main link 8' and an auxiliary link 9' which are arranged in the direction MD and which are located inside the casing 7'.
- One end of the connecting rod 8' is mounted articulated to one of the guide pots 4' at a point 17' at a distance from the axis 5' of rotation of the pot, in particular substantially at the upper end of the pot.
- the other end of the link 8' is coupled to a control system, called the advance system, which is any one of those shown below in figure 5 , 6A , 6B And 7 .
- auxiliary link 9' is mounted articulated at its two opposite ends to a respective one of the pots 4'.
- link 9' is also articulated at the end of link 8' articulated at point 17'.
- a mass 19' for balancing the system is coupled to the auxiliary link 9', being fixed to the latter on the upper side at mid-distance of the two shafts 12'.
- the advance system being housed in the sealed casing, it can be actuated either by an independent motor, or by one of the control shafts 12' of the first vertical drive means, or by a connecting rod mounted directly on an eccentric secured to one of the control shafts 12' of the first drive means.
- a mechanical connection is provided between the main connecting rod 8' and a transverse drive connecting rod 51 driven by the eccentric shaft 12' of one of the two connecting rod and eccentric shaft systems 6', for example, as represented at the figure 2A , by shaft 12' to eccentric which also drives the connecting rod 13' articulated to the pot 4' also directly connected to the connecting rod 8'.
- an intermediate lever 52 rotatably mounted relative to an axis 53 fixed relative to the housing 7 'and articulated directly, at its two ends, respectively to the connecting rod 51 and to the main connecting rod 8'.
- first longitudinal drive means are distinct from the second transverse drive means.
- FIG. 3 there is shown yet another embodiment of a needling machine comprising a control system according to the invention.
- the housing is shown in a sectional view, while the rest of the needling machine is shown in a front view.
- This needling machine comprises two 10" needle boards comprising 1" needles projecting from the underside of their respective board being arranged either in rows and columns, or randomly or pseudo-randomly, as is well known in the domain.
- Each 10" needle board is carried by a 2" beam, called a moving beam.
- the respective 2" beam and 10" plank are attached to each other, in a removable manner to allow, when the needles are worn and/or broken, to easily replace a plank with a new plank.
- the needles are intended to have a back and forth movement with an elliptical trajectory from top to bottom and from bottom to top to cross in one direction, then in the other, a sheet or a veil of fibers which are made pass in front of it in a direction of lead or MD, namely from left to right in the horizontal direction to the figure.
- Two longitudinal columns 3′′ extending along a vertical longitudinal axis 11′′ perpendicular to the plane of the board are each connected to a respective movable beam 2′′ via two respective vertical intermediate links 9 .
- Each vertical 9" link is articulated, on the one hand, at its upper end to the lower end of a respective 3" column and, on the other hand, at its lower end at a point 17" from the upper part of a respective movable 2" beam.
- First longitudinal drive means are provided to impart to each column 3" a rectilinear back and forth movement in a direction parallel to the longitudinal axis 11", which remains vertical throughout the movement.
- a sealed casing 7" encloses the first drive means and a part of each column 3", the latter passing through the wall of the casing 7" by passing through respective guide pots 4".
- Each 4" guide pot is mounted fixed in relation to the housing.
- Each 3" column during its movement back and forth vertically, slides inside the respective 4" guide pot.
- 18" guide rings are arranged on the inner wall of the 4" guide pot, to ensure sliding and lubrication between the 3" column and the 4" guide pot. Sealing between the 3" column and the 4" guide pot is ensured by a gasket not shown attached to the base of the guide pot.
- the first longitudinal drive means consist of two 6" systems with eccentric shafts, the shafts of which drive the heads of two connecting rods by rotating at the same speed in opposite directions.
- the feet of the two connecting rods are mounted hinged to a respective column .
- first vertical longitudinal drive means make it possible to impart to each column 3′′ a movement only back and forth along the vertical longitudinal axis.
- Second transverse drive means are also provided in the form of a main link 8" arranged in the direction MD.
- One end of the link 8" is hingedly mounted at the point 17" of articulation of the upper part of the one of the 2" movable beams to the vertical link.
- This movable beam 2" is thus given a back and forth movement in the direction MD, or substantially in the direction MD (as represented by the double arrow above the connecting rod 8" at the picture 3 ).
- the other end of the 8" rod is coupled to a control system, called the advance system, which can be like those shown below in figures 5 to 7 .
- a 20" auxiliary connecting rod is hinged on the one hand to the end of the main 8" connecting rod, in particular at point 17" of the mobile 2" beam, and on the other hand to the other mobile part, thus also transmitting to the latter the back and forth movement towards MD.
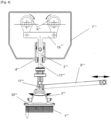
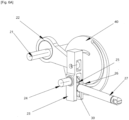
- FIG 4 there is shown another embodiment of a needling machine according to the invention.
- the housing is shown in a sectional view, while the rest of the needling machine is shown in a front view.
- This needling machine comprises a 10'" needle board comprising needles 1′′′ projecting from the underside of their respective board being arranged either in rows and columns, or randomly or pseudo-randomly, as is well known.
- the 10'" needle board is carried by a 2′′′ beam, called a moving beam.
- the 2'" beam and 10'" plank are integral with each other, in a removable manner to allow, when the needles are worn and/or broken, to easily replace a plank with a new one.
- the needles are intended to have a back and forth movement with an elliptical trajectory from top to bottom and from bottom to top to cross in one direction, then in the other, a sheet or a veil of fibers which are made pass in front of it in a direction of lead or MD, namely from left to right in the horizontal direction to the figure.
- a longitudinal column 3'' extending along a vertical longitudinal axis 11'' perpendicular to the plane of the board, is connected to the movable beam 2'' by means of a vertical intermediate rod 9''.
- the vertical rod 9′′′ is articulated, on the one hand, at its upper end to the lower end of the column 3'" and, on the other hand, at its lower end at a point 17'" from the upper part of the mobile 2'" beam.
- First longitudinal drive means are provided to impart to the column 3'" a rectilinear back and forth movement in a direction parallel to the longitudinal axis 11′′′, which remains vertical throughout the movement.
- a sealed casing 7′′′ encloses the first drive means and a part of the column 3′′′, the latter passing through the wall of the casing 7'" by passing through a respective guide pot 4'".
- the 4'" guide pot is mounted fixed relative to the casing.
- the 3′′′ column during its movement back and forth vertically, slides inside the 4'" guide pot.
- 18'" guide rings are arranged on the inside wall of each 4'" guide pot, to ensure sliding and lubrication between the column 3′′′ and the pot 4 '" respective guide. Sealing between column 3' and guide pot 4'" is ensured by a seal, not shown, attached to the base of the guide pot.
- the first longitudinal drive means consist of two 6'" systems with eccentric shafts, the shafts of which drive the heads of two connecting rods by rotating at the same speed in opposite directions.
- the feet of the two connecting rods are mounted articulated at the a respective one of the side branches of a 19'" T-link, while the main branch or rod of the T-link is hinged to the 3′′′ column.
- Second transverse drive means are also provided in the form of a main link 8′′ arranged in the direction MD.
- One end of the link 8′′′ is hingedly mounted at the point upper part of the mobile beam 2'" to the vertical connecting rod.
- This mobile beam 2'" is thus given a back and forth movement in the direction MD, or substantially in the direction MD (as represented by the double arrow above).
- the other end of the rod 8′′′ is coupled to a control system, called the advance system, which can be in particular like those represented below in figures 5 to 7 .
- the system comprises an eccentric shaft 21 coupled to a connecting rod 22 mounted articulated directly to a vertical lever 23 in one piece (or possibly consisting of several parts which are not articulated together) arranged to pivot relative to an axis 24 fixed pivot offset, in the vertical direction, below the axis of articulation of the connecting rod 22 to the lever 23.
- a connecting rod 27 is coupled directly to the lever 23.
- the connecting rod 27 is integral a slider 25 and one end of a rod 26 whose axis extends parallel to the axis 24.
- the relative position of the rod 26, and therefore also of the link 27, with respect to the pivot axis 24 of the lever along the vertical direction and/or with respect to the axis of articulation of the link 22 at the lever can be adjusted by means of an adjustment system consisting of an eccentric shaft 29 auxiliary adjustment and a rod 28 adjustment.
- the adjusting rod 28 is articulatedly coupled at its upper end to the eccentric shaft (or crankshaft) 29, while its lower end is pivotally mounted relative to the axis of the rod 26.
- the lever has an opening in the form of a slot 30, in which slides the slider 25 integral in translation with the rod 26.
- the amplitude of the back and forth movement of the link 27 can be varied both when running and when stopped, the movement reflected from the movement of the crankshaft 21 and the link 22 acting on the lever 23.
- the link 27 it can be secured or articulated to any one of the links 8, 8' and 8" of the embodiments of the figure 1 , 2 And 3 .
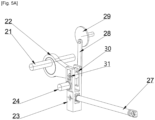
- FIG. 5A there is shown a variant of the arrangement of the figure 5 .
- the adjustment of the distance between the connecting rod 22 and the driving connecting rod 27 is carried out by adjusting the position along the slot 30 of the axis 31 of articulation of the connecting rod 22 on the lever 23 , which makes it possible to adjust the distance between the axis 31 of articulation of the link 22 and the fixed axis 24 of pivoting of the lever, and therefore also to adjust the distance between the axis 31 and the link 27, the distance between the link 27 and the axis 24 being, in this variant, fixed, whereas in the embodiment of the figure 5 , it is the distance between the axis 31 and the axis 24 which is fixed.
- FIG. 5B there is shown a variant of the arrangement of the figure 5 .
- the adjustment of the distance between the connecting rod 22 and the driving rod 27 is carried out by adjusting the position along a slot 30' formed in the lever 23 of the fixed pivot axis 24 of the lever.
- the axis 24 of the lever is integral with a slider 25' mounted to slide in the slot 30'.
- the connecting rod 22 is articulated to the lever 23 along an axis 31 of articulation which is in a fixed position on the lever 23.
- the end of articulation of the connecting rod 27 to the lever 23 is in a fixed position (as in the embodiment of there figure 5 ).
- the rod 26 from the rod 28 adjustment is articulated to the lever 23 in a fixed position.
- a spiral cam is used, consisting of a disc 40 in which is provided a spiral-shaped slot along which the rod 26 can move.
- the rod 26 follows the profile of the spiral slot, which has the effect of moving the rod 26 and therefore the slider 25 along the slot 30.
- FIG 7 there is shown yet another embodiment, in which a cylinder 41 is used instead of the crankshaft 29 of the figure 5 , the rest of the embodiment being identical.
- control or advance device or system according to the invention is represented here in combination with the needle looms of the figures 1 to 4 .
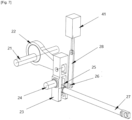
- it can also be used with other needling machines known from the prior art, for example those known from EP-A1-1736586 , EP-B1-3372716 , FR2738846 , US6161269 and the like. So, for example, at the figure 8 , there is shown yet another embodiment of a needling machine comprising a control system according to the invention.
- the casing is shown there in a sectional view, while the rest of the needling machine is shown in a front view.
- This needling machine comprises two needle boards 110 comprising needles 101 protruding from the underside of their respective board being arranged either in rows and columns, or randomly or pseudo-randomly, as is well known in the field. .
- Each needle board 110 is carried by a beam 102, called a moving beam.
- the respective beam 102 and board 110 are integral with each other, in a removable manner to allow, when the needles are worn and/or broken, to easily replace a board with a new board.
- the needles are intended to move back and forth vertically from top to bottom and from bottom to top to cross in one direction, then in the other, a sheet or veil of fibers which are passed in front of it in a feed direction or MD, namely from left to right in the horizontal direction to the figure.
- Two longitudinal columns 103 extending along a vertical longitudinal axis 111 perpendicular to the plane of the board, are each secured to a respective movable beam 102.
- Longitudinal drive means are provided to impart to each column 103 a rectilinear back and forth movement in a vertical direction parallel to the longitudinal axis 111, which remains vertical throughout the movement.
- a sealed casing 107 encloses the drive means and part of each column 103, the latter passing through the wall of the casing 107 by passing through respective guide pots 104 .
- Each guide pot 104 is mounted fixed relative to the housing.
- Each column 103 during its movement back and forth vertically, slides inside the pot 104 of the respective guide.
- Guide rings 118 are arranged on the inner wall of each pot 104 guide, to ensure sliding and lubrication between the column 103 and the pot 104 of the respective guide.
- the seal between the column 103 and the guide pot 4′′ is provided by a gasket, not shown, attached to the base of the guide pot.
- the longitudinal drive means consist of two systems 106 with eccentric shafts, the shafts of which drive the heads of two connecting rods by rotating at the same speed in opposite directions.
- the legs of the two connecting rods are hingedly connected to a respective column.
- Means for controlling, in particular adjusting, the stroke of the needles are also provided. These control means are arranged between the drive means 106 and each column 103. They comprise a lever 123 to which the connecting rod 122 of the shaft 106 is hingedly mounted. The lever 123 is pivotable with respect to a pivot axis 124 offset with respect to the axis of the articulation of the connecting rod 122 to the lever 123. A connecting rod 127 is coupled to the lever 123. The connecting rod 127 is integral with a slider 125 and one end of a rod 126 whose axis extends parallel to the axis 124.
- the lever has an opening in the form of a slot 130, in which slides the slider 125 integral in translation with the rod 126 (rod 126 which can be seen better on the figure 7 which describes the same control means which comprises a rod 26 corresponding to this rod 126).
- the relative position of the rod 126 with respect to the axis 124 along the lever can be adjusted by means of an adjustment system consisting of a cylinder 141 and an adjustment rod 128, coupled in an articulated manner at one end to the cylinder 141 and at its other end to the rod 126 pivotally.
- the relative position of the slider 125 in the slot 130 so as to adjust the distance along the lever between the axis 124 and the axis of the rod 126, this distance thus being able to vary between a minimum value (the slider 125 is located at one end of the slot so as to have the axis of the rod 126 as close as possible to the axis 124 and a maximum adjustment position, in which the slider 125 is at the other end of the slot, as far as possible from the axis 124.
- the amplitude of the back and forth movement of the link 127 can be varied both when running and when stopped, the movement reflected from the movement of the cylinder 141 and the link 122 acting on the lever 123.
- a feed control device in the embodiments of the figures 1 to 4 to control the vertical movements of the columns of the elliptical needle looms described therein.
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Nonwoven Fabrics (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR2004062A FR3109587B1 (fr) | 2020-04-23 | 2020-04-23 | Dispositif de commande du mouvement des aiguilles d’une aiguilleteuse, notamment elliptique, et aiguilleteuse comportant un tel dispositif |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP3901349A1 EP3901349A1 (fr) | 2021-10-27 |
| EP3901349C0 EP3901349C0 (fr) | 2023-07-12 |
| EP3901349B1 true EP3901349B1 (fr) | 2023-07-12 |
Family
ID=71575468
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21169008.6A Active EP3901349B1 (fr) | 2020-04-23 | 2021-04-16 | Dispositif de commande du mouvement des aiguilles d'une aiguilleteuse, notamment elliptique, et aiguilleteuse comportant un tel dispositif |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11643765B2 (zh) |
| EP (1) | EP3901349B1 (zh) |
| KR (1) | KR20210131255A (zh) |
| CN (1) | CN113550079A (zh) |
| ES (1) | ES2961698T3 (zh) |
| FR (1) | FR3109587B1 (zh) |
| TW (1) | TW202202687A (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116219643B (zh) * | 2023-02-03 | 2024-06-18 | 天津工业大学 | 高速针刺机器人设备、织造方法及高速针刺末端执行器 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2601432A (en) * | 1949-11-12 | 1952-06-24 | American Hair & Felt Company | Felt punching machine |
| FR2729405B1 (fr) * | 1995-01-12 | 1997-04-18 | Asselin | Dispositif d'actionnement alternatif et aiguilleteuse ainsi equipee |
| US5732453A (en) | 1995-09-15 | 1998-03-31 | Oskar Dilo Maschinenfabrik Kg | Needle bar driving apparatus of a needle loom |
| DE19730532A1 (de) | 1997-07-16 | 1999-01-21 | Dilo Kg Maschf Oskar | Nadelmaschine |
| AT408234B (de) * | 1999-10-08 | 2001-09-25 | Fehrer Textilmasch | Vorrichtung zum nadeln eines vlieses |
| AT408235B (de) * | 1999-10-29 | 2001-09-25 | Fehrer Textilmasch | Vorrichtung zum nadeln eines vlieses |
| FR2862988B1 (fr) * | 2003-11-28 | 2007-11-09 | Fehrer Textilmasch | Dispositif d'aiguilletage d'un matelas de fibres |
| DE102004043890B3 (de) * | 2004-09-08 | 2006-04-20 | Oskar Dilo Maschinenfabrik Kg | Nadelmaschine |
| FR2887563B1 (fr) | 2005-06-22 | 2009-03-13 | Asselin Soc Par Actions Simpli | "procede et installation pour aiguilleter une nappe de fibres mettant en oeuvre deux planches a aiguilles" |
| FR2887564B1 (fr) * | 2005-06-22 | 2007-10-26 | Asselin Soc Par Actions Simpli | Appareil d'aiguilletage pour consolider une nappe de fibres |
| TW200806839A (en) * | 2006-05-20 | 2008-02-01 | Saurer Gmbh & Amp Co Kg | Apparatus for needling a non-woven web |
| FR2909104B1 (fr) * | 2006-11-29 | 2009-02-13 | Asselin Thibeau Soc Par Action | Dispositif et procede d'aiguilletage. |
| ATE490360T1 (de) * | 2007-06-15 | 2010-12-15 | Oerlikon Textile Gmbh & Co Kg | Vorrichtung zum vernadeln einer vliesbahn |
| US8156618B2 (en) * | 2007-08-04 | 2012-04-17 | Tilman Reutter | Device for needling a fibrous web |
| ATE525509T1 (de) * | 2008-03-03 | 2011-10-15 | Oerlikon Textile Gmbh & Co Kg | Vorrichtung zum vernadeln einer faserbahn |
| ATE530692T1 (de) * | 2009-08-14 | 2011-11-15 | Dilo Kg Maschf Oskar | Antriebs- und führungseinrichtung in einer nadelmaschine |
| EP2673410B1 (de) * | 2011-02-08 | 2015-03-25 | Hi Tech Textile Holding GmbH | Verfahren und vorrichtung zum verfestigen einer kontinuierlich zugeführten warenbahn |
| FR3026112B1 (fr) * | 2014-09-22 | 2017-06-23 | Andritz Asselin Thibeau | Installation de consolidation, notamment par aiguilletage, d'une nappe de fibres |
| EP3372716B1 (de) | 2017-03-09 | 2019-09-04 | Oskar Dilo Maschinenfabrik KG | Nadelmaschine |
| EP3412819B1 (de) * | 2017-06-08 | 2019-12-25 | Oskar Dilo Maschinenfabrik KG | Nadelmaschine |
-
2020
- 2020-04-23 FR FR2004062A patent/FR3109587B1/fr active Active
-
2021
- 2021-04-16 EP EP21169008.6A patent/EP3901349B1/fr active Active
- 2021-04-16 ES ES21169008T patent/ES2961698T3/es active Active
- 2021-04-22 US US17/237,522 patent/US11643765B2/en active Active
- 2021-04-23 CN CN202110443613.2A patent/CN113550079A/zh active Pending
- 2021-04-23 KR KR1020210052763A patent/KR20210131255A/ko unknown
- 2021-04-23 TW TW110114665A patent/TW202202687A/zh unknown
Also Published As
| Publication number | Publication date |
|---|---|
| TW202202687A (zh) | 2022-01-16 |
| US11643765B2 (en) | 2023-05-09 |
| FR3109587A1 (fr) | 2021-10-29 |
| ES2961698T3 (es) | 2024-03-13 |
| US20210332515A1 (en) | 2021-10-28 |
| EP3901349C0 (fr) | 2023-07-12 |
| FR3109587B1 (fr) | 2022-05-20 |
| EP3901349A1 (fr) | 2021-10-27 |
| KR20210131255A (ko) | 2021-11-02 |
| CN113550079A (zh) | 2021-10-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1736587B1 (fr) | Appareil d'aiguilletage pour consolider une nappe de fibres | |
| EP3901349B1 (fr) | Dispositif de commande du mouvement des aiguilles d'une aiguilleteuse, notamment elliptique, et aiguilleteuse comportant un tel dispositif | |
| FR2512768A1 (fr) | Systeme de suspension de la roue pour motocycle comportant un mecanisme d'amortissement entre un organe stable et un organe oscillant | |
| FR2887563A1 (fr) | "procede et installation pour aiguilleter une nappe de fibres mettant en oeuvre deux planches a aiguilles" | |
| FR2729884A1 (fr) | Machine de coupe de matieres en feuilles, avec dispositif de coupe a lame et affuteur de lame | |
| FR2868441A1 (fr) | Dispositif d'aiguilletage d'un matelas de fibres | |
| EP3901347B1 (fr) | Aiguilleteuse elliptique a carter etanche et pot de guidage de traversee basculant | |
| EP0362019A1 (fr) | Dispositif de coupe et de poinçonnage pour matières en feuilles | |
| EP3901348B1 (fr) | Aiguilleteuse elliptique a carter etanche et pot de guidage de traversee | |
| EP1939343A2 (fr) | Dispositif et procédé d'aiguilletage guidé | |
| EP0671493B1 (fr) | Mécanisme de commande de mouvement de va-et-vient des cadres de griffes d'une mécanique d'armure | |
| FR2862988A1 (fr) | Dispositif d'aiguilletage d'un matelas de fibres | |
| FR2776307A1 (fr) | Mecanisme de tirage pour mecanique d'armure et metier a tisser comprenant un tel mecanisme de tirage | |
| FR2779117A1 (fr) | Pale pour un rotor sans palier d'un helicoptere | |
| CH646220A5 (fr) | Bourreuse de voies ferrees. | |
| FR2977592A1 (fr) | Appareil de formation de la foule et procede de commande de celui-ci. | |
| WO1996017987A1 (fr) | Aiguilleteuse a tige coulissante | |
| EP0320380B1 (fr) | Machine à agrafer à tête d'agrafage oscillante | |
| FR2541695A1 (fr) | Systeme de commande du peigne d'une machine a tisser et machine a tisser equipee d'un tel systeme | |
| FR2673205A1 (fr) | Dispositif de transmission pour machines a coudre. | |
| EP3592892B1 (fr) | Aiguilleteuse, notamment a mouvement de type elliptique, destinee a consolider une nappe de fibres | |
| EP1836934B1 (fr) | Elément de suspension pour sommier ou siège du type à lattes muni de moyens de réglage de fermeté | |
| FR2856111A1 (fr) | Moteur a combustion interne a taux de compression variable | |
| BE1018526A3 (fr) | Ensemble d'entrainement oscillant. | |
| FR2553112A1 (fr) | Dispositif de commande des crochets de machines a coudre, en particulier portables, pour des points de chainette |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| B565 | Issuance of search results under rule 164(2) epc |
Effective date: 20210824 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20220428 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: D04H 18/02 20120101AFI20230203BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20230224 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602021003361 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| U01 | Request for unitary effect filed |
Effective date: 20230809 |
|
| U07 | Unitary effect registered |
Designated state(s): AT BE BG DE DK EE FI FR IT LT LU LV MT NL PT SE SI Effective date: 20230814 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231013 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231112 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230712 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231012 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231112 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230712 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231013 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230712 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2961698 Country of ref document: ES Kind code of ref document: T3 Effective date: 20240313 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602021003361 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230712 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230712 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230712 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20230712 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| U20 | Renewal fee paid [unitary effect] |
Year of fee payment: 4 Effective date: 20240424 |
|
| 26N | No opposition filed |
Effective date: 20240415 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20240524 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20240405 Year of fee payment: 4 |