EP3324811B2 - Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut - Google Patents
Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut Download PDFInfo
- Publication number
- EP3324811B2 EP3324811B2 EP17714452.4A EP17714452A EP3324811B2 EP 3324811 B2 EP3324811 B2 EP 3324811B2 EP 17714452 A EP17714452 A EP 17714452A EP 3324811 B2 EP3324811 B2 EP 3324811B2
- Authority
- EP
- European Patent Office
- Prior art keywords
- hood
- cleaning device
- cleaning
- electromechanical drive
- designed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L15/00—Washing or rinsing machines for crockery or tableware
- A47L15/0076—Washing or rinsing machines for crockery or tableware of non-domestic use type, e.g. commercial dishwashers for bars, hotels, restaurants, canteens or hospitals
- A47L15/0081—Washing or rinsing machines for crockery or tableware of non-domestic use type, e.g. commercial dishwashers for bars, hotels, restaurants, canteens or hospitals with vertical sliding closing doors, e.g. hood-type dishwashers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L15/00—Washing or rinsing machines for crockery or tableware
- A47L15/42—Details
- A47L15/4251—Details of the casing
- A47L15/4257—Details of the loading door
- A47L15/4259—Arrangements of locking or security/safety devices for doors, e.g. door latches, switch to stop operation when door is open
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L15/00—Washing or rinsing machines for crockery or tableware
- A47L15/42—Details
- A47L15/4251—Details of the casing
- A47L15/4257—Details of the loading door
- A47L15/4261—Connections of the door to the casing, e.g. door hinges
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L15/00—Washing or rinsing machines for crockery or tableware
- A47L15/24—Washing or rinsing machines for crockery or tableware with movement of the crockery baskets by conveyors
- A47L15/241—Washing or rinsing machines for crockery or tableware with movement of the crockery baskets by conveyors the dishes moving in a horizontal plane
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L15/00—Washing or rinsing machines for crockery or tableware
- A47L15/42—Details
- A47L15/46—Devices for the automatic control of the different phases of cleaning ; Controlling devices
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2401/00—Automatic detection in controlling methods of washing or rinsing machines for crockery or tableware, e.g. information provided by sensors entered into controlling devices
- A47L2401/26—Loading door status, e.g. door latch opened or closed state
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2401/00—Automatic detection in controlling methods of washing or rinsing machines for crockery or tableware, e.g. information provided by sensors entered into controlling devices
- A47L2401/30—Variation of electrical, magnetical or optical quantities
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2401/00—Automatic detection in controlling methods of washing or rinsing machines for crockery or tableware, e.g. information provided by sensors entered into controlling devices
- A47L2401/32—Vibration or sound detection
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2401/00—Automatic detection in controlling methods of washing or rinsing machines for crockery or tableware, e.g. information provided by sensors entered into controlling devices
- A47L2401/34—Other automatic detections
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2501/00—Output in controlling method of washing or rinsing machines for crockery or tableware, i.e. quantities or components controlled, or actions performed by the controlling device executing the controlling method
- A47L2501/22—Loading doors, e.g. door latches, inflatable door seals
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2501/00—Output in controlling method of washing or rinsing machines for crockery or tableware, i.e. quantities or components controlled, or actions performed by the controlling device executing the controlling method
- A47L2501/26—Indication or alarm to the controlling device or to the user
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2501/00—Output in controlling method of washing or rinsing machines for crockery or tableware, i.e. quantities or components controlled, or actions performed by the controlling device executing the controlling method
- A47L2501/28—Machine starting, e.g. normal start, restart after electricity cut-off or start scheduling
Definitions
- the invention relates to a cleaning device having the features of claim 1 and a method for cleaning items to be cleaned having the features of claim 11.
- Such cleaning devices and methods can be used in the field of dishwashing technology, particularly in commercial kitchens and communal catering facilities.
- the invention is used in hood-type dishwashers or pass-through dishwashers.
- dishwashing technology i.e. with regard to cleaning devices in the form of dishwashers.
- these can be commercial dishwashers.
- Examples of such dishwashers are, in particular, the glass and dishwashing machines of the DV series or the EcoStar series from Meiko Maschinenbau GmbH & Co. KG, Offenburg, Germany, or the PT series from Winterhalter Kunststoff GmbH, Meckenbeuren, Germany.
- the present invention can also be used in other products in principle.
- hood dishwashers In known hood dishwashers, the hood is usually guided by means of a suitable guide, whereby the operating personnel can the hood can move from a closed to an open position or vice versa.
- automatic hood-type dishwashers are also known in which the hood moves automatically, for example, driven by a motor.
- the hood movement is usually initiated by a corresponding signal being given via the hood-type dishwasher's control panel.
- separate buttons or switches can be provided.
- the disadvantage of such arrangements is that although the control elements can in principle be positioned anywhere, they each have to be wired separately, which is complex and cost-intensive in practice.
- the operating elements are not always easily accessible for the operator. If the hood movement is triggered solely via the dishwasher's control panel, the operator must leave their working position to initiate the hood movement. This position is usually located to the side of the dishwasher, for example, next to a basin with a pre-rinse spray.
- DE 10 2007 003 451 A1 and DE 20 2007 006 818 U1 describe a cabinet with one or more drawers and a room microphone as well as solid-state sound sensors.
- DE 10 2012 223 775 A1 describes a household appliance with a structure-borne sound sensor which is designed to detect impact sound from a person moving in an area surrounding the household appliance.
- DE 10 2014 007 172 A1 describes an electronic household appliance with a gesture recognition device.
- a cleaning device and a method are to be provided that enable the opening or closing of a cleaning chamber of the cleaning device in a simple, cost-effective, and user-friendly manner.
- the terms “have,””have,””comprise,” or “include,” or any grammatical variations thereof, are used non-exclusively. Accordingly, these terms can refer both to situations in which, apart from the features introduced by these terms, no further features are present, or to situations in which one or more further features are present.
- the expression “A has B,””A has B,””A comprises B,” or “A includes B” can refer both to the situation in which, apart from B, no further element is present in A (i.e., a situation in which A consists exclusively of B), and to the situation in which, in addition to B, one or more further elements are present in A, for example, element C, elements C and D, or even further elements.
- the terms “at least one” and “one or more,” as well as grammatical variations of these terms, when used in connection with one or more elements or features and intended to express that the element or feature may be provided singly or multiple times, are generally used only once, for example, when the feature or element is first introduced. Upon subsequent re-mention of the feature or element, the corresponding term “at least one” or “one or more” is generally no longer used, without limiting the possibility that the feature or element may be provided singly or multiple times.
- a cleaning device for cleaning items to be cleaned.
- a cleaning device is generally understood to mean a device in which the items to be cleaned are cleaned by means of at least one cleaning fluid in order to at least partially free them of adhering dirt and/or other contaminants.
- the cleaning fluid can in particular comprise at least one cleaning liquid.
- the cleaning device can also exert a germicidal effect or even a disinfecting effect on the items to be cleaned.
- a method for cleaning items to be cleaned comprises exposing the items to be cleaned to at least a cleaning fluid for the purpose of at least partially removing adhering dirt from the item to be cleaned.
- items to be cleaned can generally be understood to mean any goods that can be subjected to cleaning or a cleaning process, for example industrial goods. Without limiting further possible embodiments, reference is made below to items to be cleaned in the form of dishes.
- Items to be washed should generally include any objects that are used for the preparation, storage, presentation or transport of food and/or beverages. In particular, these can be items to be washed selected from the group consisting of dishes such as cups, plates, glasses, bowls or dishes; pots; trays; cutlery; warming devices; containers; boxes; baskets. Other devices that can be used directly or indirectly for the processing, preparation, transport or presentation of food and/or beverages or precursors of food and/or beverages can also be used.
- the cleaning device is designed as a dishwasher and as a hood-type dishwasher and/or a pass-through dishwasher.
- the cleaning device further comprises at least one cleaning chamber and at least one covering device that at least partially encloses the cleaning chamber.
- a cleaning chamber can generally be understood to be a completely or at least partially shielded space in which the items to be cleaned can be exposed to at least one cleaning fluid and/or multiple cleaning fluids.
- at least one exposure device for exposing the items to be cleaned to the at least one cleaning fluid can be provided within the cleaning chamber.
- the items to be cleaned can also be completely or partially dried within the cleaning chamber.
- the cleaning device can in particular be designed as a single-chamber cleaning device.
- the items to be cleaned can also be referred to below as items to be washed, and the cleaning chamber can also be referred to as the rinsing chamber.
- the cleaning device comprises at least one covering device that at least partially encloses the cleaning chamber.
- a covering device is generally understood to be a device or element that at least partially delimits the cleaning chamber and simultaneously provides access to the Cleaning chamber enables, for example, loading the cleaning chamber with items to be cleaned or removing items to be cleaned from the cleaning chamber.
- the cover device is designed as a hood that is mounted for vertical displacement.
- the cover device comprises a hood that can be moved upwards to open the cleaning chamber and downwards to close the cleaning chamber together with a base of the cleaning device.
- the cover device can be moved via at least one gear by means of at least one electromechanical drive in an opening direction from a closed position to an open position, or in a closing direction from an open position to a closed position.
- the cover device is generally movably mounted so that it can be brought into at least two different positions: an open position and a closed position. Intermediate positions are also possible. The majority of possible positions between the open position and the closed position, optionally including the open position and the closed position, can also be referred to as the opening path.
- a "gearbox” can generally be understood as a machine element by means of which a force and/or torque transmission can take place between a drive and a driven element.
- motion variables can also be changed by means of a gearbox.
- a change in force or torque can take place by means of the gearbox.
- a movement to be changed can be a rotational movement.
- the gearbox can thus also include a torque converter.
- the transmission may in particular comprise at least one traction mechanism, in particular at least one chain transmission.
- a traction mechanism transmission is generally understood to mean a transmission in which a torque is transmitted between two elements, for example between at least one shaft and at least one further element, in particular also between two shafts, by means of a traction mechanism, for example a traction mechanism that wraps around the at least one shaft.
- a traction mechanism may generally be a deformable, for example bendable or stretchable, elongated element. by means of which a tensile force can be transmitted.
- the power transmission path can have at least one traction means, in particular a flexible traction means.
- the traction means can in particular be selected from the group consisting of: a chain, in particular a roller chain, a bolt chain or a link chain; a rope and/or cable pull; an elastic band; a belt, in particular a toothed belt or a V-belt.
- a chain in particular a roller chain, a bolt chain or a link chain
- a rope and/or cable pull an elastic band
- a belt in particular a toothed belt or a V-belt.
- other traction means can also be used in principle.
- an “electromechanical drive” is generally understood to mean a device configured to convert electrical energy into at least one mechanical movement, in particular a linear movement and/or a rotary movement.
- the electromechanical drive can comprise at least one motor, as explained in more detail below.
- the electromechanical drive can be coupled to the cover device via the gear mechanism in order to move the cover device in the opening direction, i.e., to open it completely or partially, and in the closing direction, i.e., to close it completely or partially.
- electromechanical drives can also be used, for example, at least one drive selected from the group consisting of a hydraulic drive, an electrohydraulic drive, a pneumatic drive, or an electropneumatic drive.
- a hydraulic drive for example, at least one drive selected from the group consisting of a hydraulic drive, an electrohydraulic drive, a pneumatic drive, or an electropneumatic drive.
- electropneumatic drive for example, at least one drive selected from the group consisting of a hydraulic drive, an electrohydraulic drive, a pneumatic drive, or an electropneumatic drive.
- Other configurations are also conceivable.
- the cleaning device further comprises a sensor.
- the sensor is configured to detect a manual application of force to the cover device in the opening or closing direction.
- the cleaning device is configured to actuate the electromechanical drive in accordance with the detection of the manual application of force.
- a “sensor” within the meaning of the present invention is basically any element that is configured to detect at least one measured variable and generate at least one corresponding signal, for example an electrical signal, for example an analog and/or a digital signal.
- the at least one sensor can in particular comprise at least one sensor selected from the group consisting of a motion sensor, a pressure sensor, a tension sensor, a strain sensor, an incremental encoder, an actuator, an optical sensor, a A mechanical sensor, a pneumatic sensor, a hydraulic sensor, an electromagnetic sensor, a magnetic sensor, or an electrical sensor. Other sensors or combinations of the aforementioned sensors are also possible in principle.
- the at least one sensor may, in particular, comprise at least one angular position sensor, which monitors at least one angular position of at least one shaft connected to the electromechanical drive, in particular the motor.
- a "manual force application" within the meaning of the present invention is generally understood to mean any action or exertion of a force by a human person, in particular a user. This can be, for example, a compressive force or a tensile force. Detection of the manual force application on the cover device, i.e., a force acting on the cover device, can occur directly or indirectly. Direct detection includes, for example, a tensile and/or compressive force acting on the cover device.
- Indirect detection includes, for example, an effect caused by the applied force, such as a movement, for example, a movement of the cover device and/or at least one element connected to the cover device, for example, the gear mechanism or a part thereof and/or the electromechanical drive or a part thereof, for example, a motor or a shaft connected to the motor.
- the manual force application can occur entirely or partially directly on the cover device and/or entirely or partially indirectly, for example, via at least one element connected to the cover device, such as a handle.
- the manual force application that is detected occurs in the opening direction or in the closing direction.
- the force manually exerted by the user has at least one force component in the opening direction and is preferably oriented parallel to the opening direction, or has at least one force component in the closing direction and is preferably oriented parallel to the closing direction.
- a force can be exerted in a vertical upward or downward direction, so that, for example, the hood is slightly raised or lowered by the manual force application, which can be detected by the sensor.
- control is generally understood to mean a type of operation of the electromechanical drive, in particular starting the electromechanical drive, stopping the electromechanical drive, changing a drive speed of the electromechanical drive, for example, a rotational speed of a motor, or changing the direction of the electromechanical drive, for example, changing a rotational direction of a motor.
- the control can be effected, for example, by a controller of the cleaning device, which acts directly or indirectly on the electromechanical drive to effect the control, for example, according to one or more of the aforementioned types.
- control according to the detection of the manual force application
- the control can be changed upon detection of the manual force application.
- the control can be changed when it is detected that a manual force application is occurring, and/or the type of control can be changed when it is detected that a manual force application is occurring.
- the control can also be changed according to the direction of the manual force application.
- a movement of the cover device caused by manual force application can be detected and its direction determined.
- the electromechanical drive is then controlled accordingly in such a way that it continues the movement of the cover device alone, without further manual force application, until this movement has reached its end, i.e., the open or closed position.
- the at least one sensor detects when, with the hood in the closed position, a user manually begins to open the hood, for example, by moving the hood slightly upwards.
- the electromechanical drive for example, the motor, is then controlled in such a way that this opening movement is continued exclusively by the electromechanical drive until the open position is reached.
- the at least one sensor detects that, with the hood in the open position, a user manually begins to close the hood, for example, by moving the hood slightly downwards
- the electromechanical drive for example, the motor, is controlled in such a way that this closing movement is continued exclusively by the electromechanical drive until the hood reaches the closed position.
- An opening movement is generally understood to mean a movement in the opening direction
- a closing movement is generally understood to mean a movement in the closing direction.
- the cleaning device is a dishwasher.
- the dishwasher is selected from the group consisting of a hood-type dishwasher and a pass-through dishwasher.
- a hood-type dishwasher is generally understood to be a dishwasher having a base that provides an underside of the washing chamber and at least one hood or hood shell as a covering device, which completely or partially forms at least one side wall of the cleaning chamber and optionally at least one lid of the cleaning chamber and which can be moved upwards or downwards to expose the cleaning chamber.
- a pass-through dishwasher is generally understood to be a dishwasher having at least one pass-through device by means of which items to be cleaned, for example a basket with items to be cleaned, can be pushed into the washing chamber from an insertion side, for example with the hood open, and on a second side, for example a removal side, the items to be cleaned can be pushed out of the cleaning chamber again after the cleaning process has been completed.
- the term "pass-through dishwasher” is often used as a generic term and includes, for example, hood-type dishwashers with a pass-through mechanism. Pass-through dishwashers generally do not have an active pass-through mechanism, but rather a manual dish feed.
- the pass-through mechanism includes, for example, slide rails and/or guides. For examples of such hood-type dishwashers, reference can be made to the above-mentioned prior art.
- the cleaning device can further comprise, in particular, at least one application device for applying at least one cleaning fluid to the items to be cleaned in the cleaning chamber.
- at least one application device for applying at least one cleaning fluid to the items to be cleaned in the cleaning chamber.
- one or more cleaning nozzles can be provided in the cleaning chamber, via which the cleaning fluid can be sprayed and/or sprayed and/or dripped onto the items to be cleaned.
- one or more spray arms in particular rotating spray arms, can also be provided.
- the cleaning device can further comprise at least one processing tank, in particular at least one boiler, formed separately from the cleaning chamber.
- a rinse liquid can be temperature-controlled in the processing tank while a rinsing process takes place in the cleaning chamber.
- the cleaning device can be designed, in particular, as a commercial dishwasher.
- the opening movement direction and the closing movement direction each have at least one vertical directional component.
- the cover device has different potential energy, in particular different potential energy, in the closed position and the open position.
- the cover device in the open position, can be arranged, in particular, at least partially above the closed position.
- the covering device can in particular be or comprise a linearly movable covering device.
- the covering device can in particular exclusively perform a linear movement between the open position and the closed position or vice versa, without any rotational component. This is particularly the case with This is the case with hood-type dishwashers of conventional design. However, other configurations with one or more rotating components or with an exclusively rotary movement are also possible in principle.
- the cleaning device can, in particular, have at least one linear guide for the cover device, in particular a guide rail and/or a guide rod.
- the cleaning device can, in particular, have at least one controller.
- a "controller” is generally understood to mean a device configured to influence at least one function of the cleaning device.
- the controller can comprise at least one electrical controller, in particular an electrical controller with at least one data processing device.
- the controller can comprise at least one processor, at least one microcomputer, or at least one application-specific integrated circuit. Other configurations are also possible.
- the controller can, in particular, be programmatically configured to control at least one function of the cleaning device, for example, at least one program sequence of at least one cleaning program.
- the controller can further comprise at least one user interface, for example, at least one input device that enables a user to transmit at least one command and/or at least one piece of information to the controller.
- the user interface can comprise at least one keyboard and/or at least one key and/or at least one switch.
- the user interface can comprise at least one output device, for example, at least one display and/or at least one indicator device.
- the controller can comprise at least one electronic interface, for example, at least one wireless or wired interface.
- the control system can, for example, be or comprise a central machine control system by means of which one or more cleaning programs, in particular one or more rinsing programs, can be controlled.
- the control system can be configured to control at least one rinsing process, at least one post-rinsing process, and optionally at least one drying process.
- the controller is configured to control the electromechanical drive.
- the controller can be configured to start or stop the electromechanical drive, determine or reverse a direction of movement of the electromechanical drive, or set a speed of the electromechanical drive, for example by transmitting a corresponding electrical signal.
- the controller can be connected to the electromechanical drive via at least one interface, e.g., wired or wireless.
- a detected, user-induced opening or closing movement can be continued independently by the electromechanical drive, for example to the open position or to the closed position.
- the electromechanical drive can in particular comprise at least one motor, in particular an electric motor, in particular a geared motor.
- the motor can in particular be a DC geared motor.
- other configurations are also possible in principle.
- the motor can, in particular, be a non-self-locking motor, for example, a non-self-locking electric motor, preferably a non-self-locking DC motor.
- a "non-self-locking" motor is generally understood to mean a motor which, when not controlled and, for example, not supplied with current, permits movement of its drive axle or drive shaft. In this way, for example, an initial manual movement of the covering device can be initiated without the motor significantly inhibiting this movement.
- the cleaning device can be configured such that the motor is moved by the manual application of force to the covering device, wherein the sensor is configured to detect a movement of the motor, in particular a rotational movement.
- the senor can comprise at least one incremental encoder, which detects a rotary movement of the motor induced by the manual movement of the covering device.
- An "incremental encoder" within the meaning of the present invention is understood to mean, in particular, a sensor configured to detect position changes, in particular position changes during a linear movement of the covering device and/or the electromechanical drive, and/or angular changes, for example, angular changes during a rotary movement of the covering device and/or the electromechanical drive, in particular the motor.
- other configurations are also possible in principle.
- the senor can also be configured, in particular, to detect the direction of manual force application.
- This direction detection can be used, in particular, to support the detected, user-induced movement in the direction desired by the user or even to continue it independently using the electromechanical drive.
- the at least one sensor can generally be arranged at various locations on the cleaning device to fulfill the aforementioned function.
- a combination of sensors is also possible in principle.
- the sensor can be connected to at least one element selected from the group consisting of: the covering device, the gear, and the electromechanical drive.
- the sensor can, in particular, have at least one incremental encoder connected to the electromechanical drive.
- the sensor is configured to detect the manual application of force to the covering device due to a movement.
- the manual application of force to the covering device can, in particular, initiate a movement of the covering device, preferably a minimal movement, for example a linear movement of 50 mm or less, in particular 30 mm or less, for example 10 mm or less, in particular 5 mm or less. Due to this preferred minimal movement, the amount of force required by a user to initiate the movement can be kept as low as possible.
- the movement can, in particular, be selected from a movement of the covering device, a movement of the gear, and a movement of the electromechanical drive. Combinations are also possible.
- a threshold value method can be used to detect movement. For example, it can be detected whether, due to the manual application of force, the covering device moves by more than a predetermined threshold value or by at least one predetermined threshold value, for example upwards or downwards, for example in the opening or closing direction.
- the detection of movement can, in particular, generally be associated with a query as to whether or not the electromechanical drive is currently being controlled to move the covering device.
- the cleaning device can be configured such that if a movement by at least one predetermined threshold value or by more than a predetermined threshold value is detected, this is only recognized as a movement due to the manual application of force if the covering device is not simultaneously being driven by the electromechanical drive. Only then, for example, can the control system interpret this movement as a user's request to perform an opening or closing movement.
- the cleaning device can therefore be configured, in particular, to compare the movement with at least one threshold value, for example, by comparing a traveled distance or an angle traveled by the covering device, the gear, or the electromechanical drive with the at least one threshold value in order to detect the manual application of force to the covering device.
- at least one threshold value for example, by comparing a traveled distance or an angle traveled by the covering device, the gear, or the electromechanical drive with the at least one threshold value in order to detect the manual application of force to the covering device.
- it can be detected as a further boundary condition whether the electromechanical drive is in operation or not, so that, for example, movements induced by the electromechanical drive can be excluded.
- the transmission can in particular comprise at least one traction mechanism, in particular at least one chain transmission.
- a traction mechanism transmission is generally understood to be a transmission in which a torque is transmitted between two elements, for example between at least one shaft and at least one further element, in particular also between two shafts, with the aid of a traction mechanism, for example a traction mechanism that wraps around the at least one shaft.
- a traction mechanism can generally be understood to be a deformable, for example bendable or stretchable, elongated element by means of which a tensile force can be transmitted.
- the power transmission path can have at least one traction mechanism, in particular a bendable traction mechanism.
- the traction mechanism can in particular be selected from the group consisting of: a chain, in particular a roller chain, a pin chain or a link chain; a rope and/or cable pull; an elastic band; a belt, particularly a toothed belt or a V-belt.
- a chain in particular a roller chain, a pin chain or a link chain
- a rope and/or cable pull ; an elastic band
- a belt particularly a toothed belt or a V-belt.
- other traction devices can also be used in principle.
- the above-mentioned at least one sensor of the cleaning device can in principle be arranged at at least one arbitrary location within the cleaning device which is suitable for detecting the manual application of force to the covering device in the opening direction or in the closing direction.
- the at least one sensor can, for example, be arranged at any arbitrary location within this gear and/or within this power transmission line.
- the sensor can be arranged relatively far forward in the entire power transmission, for example as a strain gauge, which can be arranged, for example, on a rod or on a first chain.
- This embodiment can, for example, also be used in combination with a drive motor which is self-locking.
- other embodiments are also possible in principle.
- the cleaning device can further have additional functions.
- the cleaning device can be further configured to start at least one cleaning program, in particular at least one rinsing program, after performing a closing movement after the cover device has reached the closed position.
- the hood can be in the closed position, in particular the lower end position, after closing, and a rinsing program can then additionally be started automatically, in particular if the control system is parameterized accordingly.
- a second aspect of the present invention proposes a method for cleaning items to be cleaned.
- the method can be carried out, in particular, using the cleaning device according to the present invention, in particular according to one or more of the embodiments described above and/or according to one or more of the embodiments described in more detail below. Accordingly, for possible definitions and/or options of the method, reference can be made to the description of the cleaning device.
- the method comprises various process steps, which can be carried out, for example, in the specified order. However, a different order is also possible in principle. Furthermore, the method may comprise additional, unspecified process steps. Furthermore, one or more or even all of the process steps may be carried out repeatedly and/or continuously. Furthermore, two or more of the specified process steps, or even all of the specified process steps, may be carried out simultaneously or in an overlapping manner.
- the method utilizes at least one cover device that at least partially encloses the cleaning chamber.
- the cover device can be moved via at least one gear mechanism by means of at least one electromechanical drive in an opening direction from a closed position to an open position, or in a closing direction from an open position to a closed position.
- the method comprises detecting a manual force application to the cover device in the opening direction or in the closing direction by means of at least one sensor.
- the method further comprises controlling the electromechanical drive in accordance with the detection of the manual force application.
- the method may further comprise applying at least one cleaning fluid to the items to be cleaned in the cleaning device, for example, using at least one application device.
- This application may occur, for example, after the covering device has been moved into the closed position in the closing direction.
- control of the electromechanical drive can in particular comprise at least one of the following steps: upon detection of a manual force application in the opening movement direction, a control of the electromechanical drive such that the cover device is moved in the opening movement direction; upon detection of a manual force application in the closing movement direction, a control of the electromechanical drive such that the cover device is moved in the closing movement direction.
- the cleaning device and method have numerous advantages over known devices and methods of the type mentioned. For example, Implement support for the opening or closing movement of a cover device without requiring significant additional equipment. In particular, additional switches, buttons, proximity sensors, or similar complex sensors that signal a user request to open or close the cover device can be eliminated. This also eliminates the problem of wiring such switches, buttons, or sensors, as well as the problem of arranging these devices.
- the sensor is easy to implement.
- the sensor can also be used for multiple functions.
- incremental encoders can be easily implemented in gearboxes or motors. Such incremental encoders can also be used, for example, to monitor motor functionality.
- Operation can be designed to be very intuitive, since the user usually applies force to the cover itself to open or close it. This force can be detected and automatically assisted. The user may not even be aware that by applying force to the cover, they are triggering a switching process that either assists the movement of the cover or is automatically performed by the electromechanical drive.
- the cover device can, for example, have at least one handle or at least one lever that can be used by the user for the opening or closing process.
- An additional button or switch is no longer required, since the cover device itself and its movement can be used, for example, as a control element.
- the opening or closing of the covering device does not necessarily have to be triggered by the manual application of force to the covering device.
- other triggers for an opening or closing movement can also be provided.
- the cleaning device can be designed such that, in addition to the design according to the invention, a program-controlled opening or closing movement also takes place, in which an impulse given by a user does not necessarily trigger the opening or closing movement.
- the cleaning device in particular the control system, can be set up such that At the end of a cleaning program, the covering device, for example the hood, is opened automatically, for example according to a parameterization of the cleaning program.
- the present invention is particularly advantageous in hood-type dishwashers or pass-through dishwashers in which a heavy hood must be moved.
- the hood can be driven, for example, via chains or other traction devices with a motor, such as a DC geared motor.
- An incremental encoder can be located at the end of the motor's shaft, which is used to implement monitoring functions.
- the geared motor can be designed such that it is not self-locking. This means that, for example, in the event of a malfunction, the hood can also be operated manually. This design makes it possible to move the hood manually, which moves the motor along with it.
- the incremental encoder can detect a rotary movement of the motor and the associated working direction and transmit this information to the controller, for example via at least one signal.
- the controller can evaluate this signal, interpret the movement request, and then drive the motor in the corresponding direction.
- movement can be detected, for example, using a threshold value method.
- a hood lift of 5 mm or more can be detected, and the motor can then be controlled in the corresponding direction.
- no separate buttons or switches are required, although these may be present, thus avoiding increased assembly and installation requirements and thus enabling costs to be reduced.
- Hood-type dishwashers are usually designed with one or more handles on the hood or one or more levers on the hood, which are generally located in a convenient position relative to the operator's working position and can, for example, be operated without direct visual contact. Overall, the invention results in a user-friendly and safe situation.
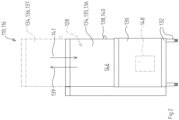
- FIG 1 An embodiment of a cleaning device 110 according to the invention is shown.
- the cleaning device 110 is designed in this embodiment as a pass-through dishwasher 112, which comprises an infeed table or feed table 114, a hood-type dishwasher 116, and an outfeed table 118.
- the cleaning device 110 is in Figure 1 shown in front view.
- the hood dishwasher 116 is shown again in a side view.
- the cleaning device 110 can, for example, comprise a basin 120 and a hose spray 122 for pre-cleaning the items to be cleaned 124 in the area of the inlet table 114.
- the items to be cleaned 124 can, for example, be introduced into a cleaning chamber 128 of the cleaning device 110 by means of one or more dish baskets 126. There, the items to be cleaned 124 can be exposed to one or more cleaning fluids, for example via one or more Figures 1 and 2 not shown in detail, for example nozzle systems.
- the hood-type dishwasher 116 has a base 130, which has, for example, a frame 132. Furthermore, the hood-type dishwasher 116 comprises a covering device 134, which is designed as a hood 136.
- This hood 136 can be opened via an opening path and is in the Figures 1 and 2 each shown with solid lines in a closed position 135 and with dashed lines in an open position 137.
- the direction of movement from the closed position 135 to the open position 137 defines an opening movement direction 139
- the opposite direction of movement from the open position 137 to the closed position 135 defines a closing movement direction 141.
- the hood-type dishwasher 116 further comprises at least one actuating element 138 in the form of a handle 140.
- the handle 140 is shown with solid lines in the closed position 135, and with dashed lines in the open position 137.
- the handle 140 for example, engages directly on the hood 136.
- At least one controller 148 can also be arranged in the base 130 of the hood-type dishwasher 116. However, a controller 148 can also be arranged alternatively or additionally at other locations of the hood-type dishwasher 116. Furthermore, further elements can be arranged in the base 130, such as at least one treatment tank in which a rinse liquid can be tempered. for example, at least one boiler. These elements are not shown in the figures.
- the hood 136 is connected to at least one electromechanical drive 188 via at least one gear 184.
- the electromechanical drive 188 is configured to move the hood 136 in the opening movement direction 139 or the closing movement direction 141 via the gear 184, for example, to move the hood 136 from the closed position 135 to the open position 137 or vice versa.
- the gear 184 can, for example, be or have a traction mechanism 185, as described below, as explained in more detail below.
- the gear 184 comprises, for example, a power transmission path 182, one or more torque transmission elements 168, one or more torque converters 166, one or more sprockets 162, 170, one or more traction mechanisms 158, 172, and optionally further elements.
- other types of transmissions 184 can also be used within the scope of the present invention, for example, transmissions 184 without traction means and/or transmissions 184 without torque converters. The following description of transmission 184 should therefore be considered exemplary.
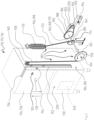
- the cleaning device 110 has guide elements 150 on both sides of its rear side, one of these guide elements 150 in Figure 3
- This guide element 150 can, as shown in Figure 3 shown, for example, a guide rail 152 or another type of guide profile, for example a rectangular profile in the form of a rectangular tube and/or square tube. This is, as shown in Figure 3 shown, arranged vertically.
- Each guide element 150 is supported, for example, by rollers 154, for example, three rollers on each side.
- a cantilever arm 156 is formed at the top of each guide element 150, onto which the hood 136, for example a completely pre-assembled one, can be pushed and secured, for example, with only a few fastening elements, e.g., two screws.
- a first traction means 158 for example, at least one first roller chain, is attached to the bottom of each guide element 150.
- This first traction means 158 is guided via a deflection wheel 160 in the upper region of a housing of the cleaning device 110.
- the first traction means 158 is further placed on a first sprocket 162 in the lower region of the housing.
- the illustrated arrangement of the guide element 150, the first traction means 158, the deflection wheel 160, and the first sprocket 162 is duplicated on the opposite side of the rear of the cleaning device 110, so that two, for example, identical, first sprockets 162 exist, of which Figure 3 To simplify the illustration, only one is shown.
- the two first sprockets 162 are connected to one another in a torsionally rigid manner via a shaft 164, to which they are mounted in a rotationally rigid manner.
- a torque converter 166 is mounted on this shaft 164, also in a torsionally rigid manner.
- This torque converter comprises a rotatably mounted torque transmission element 168, which in this exemplary embodiment is designed as a third sprocket 170.
- This third sprocket 170 is rotatably mounted about the axis of the shaft 164.
- the torque transmission element 168 in the form of the third chain wheel 170 is designed, for example, with an uneven radius, as in Figure 3 This means that a distance R between the point of application 174 and the axis changes with an angular position of the torque transmission element 168. However, this also changes the torque transmitted by the third traction means 172 to the shaft 164, since this torque depends on the angular position of the sprocket 170.
- the two chains of the first traction means 158 which are attached to the bottom of the guide rails 152, are largely unwound from the sprockets 162.
- the third traction means 172 also designed in the form of a roller chain, for example, is largely wound on its third sprocket 170, and the spring elements 176, which are designed as tension springs, for example, are, as in Figure 3 shown, tensioned.
- the hood 136 is raised, the first two traction means 158 wind up onto their wheels 162.
- the third traction means 172 is unwound, and the spring elements 176 relax.
- the third sprocket 170 has an effective radius and/or pitch circle that changes over its circumference.
- This design allows the change in the spring force over the opening travel or over the extension to the force actually required to compensate for the weight of the hood 136.
- non-uniform adjustments of the effective radius R can also be realized. For example, to dampen a movement at the end positions, sudden diameter changes can also be incorporated into the sprockets.
- the traction means 158 and the torque converter 166 are components of a power transmission line 182, by means of which a spring force of the at least one spring element 176 can be transmitted to the cover device 134 in a converted form.
- the power transmission line 182 is a component of the transmission 184. Further components of the power transmission line can be the deflection wheels 160 as well as the first chain wheels 162 and the shaft 164. Due to the effective radius R, which varies across the angular position, the torque converter 166 and thus the entire power transmission line 182 has a transmission ratio that varies across the opening travel.
- the torque converter 166 is thus, for example, a component of the transmission 184, which in this exemplary embodiment has a variable transmission ratio that varies across the opening travel of the cover 136.
- a component of the transmission 184 which in this exemplary embodiment has a variable transmission ratio that varies across the opening travel of the cover 136.
- embodiments of the present invention are also possible in which no transmission 184 with a variable gear ratio is used, but rather a transmission with a fixed gear ratio.
- the sprockets 162, 170 can, for example, be individually manufactured and assembled from metal. Furthermore, individual parts of the gear set, such as guide discs, can also be made entirely or partially from plastic. Manufacturing the entire gear set from plastic is also conceivable.
- the gear set is preferably mounted on roller bearings, which reduces friction and thus enables smooth running.
- the sprockets 162 and the shaft 164, as well as the traction means 158, 172, can be further components of the transmission 184.
- At least one electromechanical drive 186 is coupled to the gear 184, for example, at least one motor and particularly preferably at least one electric motor.
- this can be a DC gear motor.
- the electromechanical drive 186 can, for example, be driven by means of a further chain 188 and/or another type of traction means as well as by means of two pinions 190, which can be of the same or different types, and/or by means of another gearbox with a fixed or variable gear ratio.
- the electric motor can be mounted in such a way that its torque is absorbed by a spring-supported torque support 192. If the torque is too high, for example, if the closing force on the hood 136 is too high, this torque support 192 is deflected. This movement can be detected, for example, by a switch 194, which can transmit its signal to the controller 148. The controller 148 can then, for example, stop the movement of the hood 136 and optionally initiate a reverse movement.
- At least one rotary encoder can be integrated into the power transmission line 182, including the electromechanical drive 186, which can also be connected to the controller 148.
- This rotary encoder is in Figure 3 not shown.
- the controller 148 can, for example, detect when the signals from the rotary encoder are missing, for example because a movement is obstructed. In this case, the controller 148 can then, for example, stop the movement of the hood and/or initiate a reverse movement. To limit any crushing force that may occur, the weight compensation force for the hood 136 can be adjusted to the closing force of the drive so that safe values are not exceeded.
- the power transmission line 182 can be designed redundantly.
- a single third traction device 172 such as a single third chain
- two chains can be used in parallel or "back to back.”
- the third traction device 172 can be supplemented by another deformable component and/or traction device, such as a rope, which can absorb the tensile force in the event of a chain break.
- the spring element 176 can have at least one securing element 196 which, for example, can be a direct component of the spring elements 176 or, what is also intended to be included, can be coupled to them.
- this securing element 196 can comprise a catching element or a catching device, which in this exemplary embodiment are coupled to the two spring elements 176.
- this securing element can have at least one securing rod 198, wherein the force transmission path 182 can couple to the securing rod 198 in the event of a break in at least one spring element 176 or, in the case of multiple spring elements 176, to the force transmission path 182.
- the force transmission path 182 can couple to the securing rod 198 in the event of a break in at least one spring element 176 or, in the case of multiple spring elements 176, to the force transmission path 182.
- other configurations are also possible.
- two first traction means 158 can be provided.
- a different number is also possible.
- two or more of the aforementioned elements can also be combined in whole or in part.
- the two first traction means 158 can also be shorter and connected, for example, with a single chain, which can then be individually connected to the weight-compensating spring elements 176 via the gear set.
- roller chains can also be implemented with other flexible or deformable traction means, or in combination with various types of traction means.
- traction means for example, bolt chains, link chains, belts, or ropes can be used.
- a user can, for example, actuate one or more operating elements 200, which can be arranged, for example, laterally or on a front side of the base 130 and/or the hood 136. These can, for example, act on the controller 148, which in turn controls the electromechanical drive 186.
- the arrangement and electrical connection of the at least one operating element 200 are fundamentally problematic.
- the operating personnel may have to leave the workstation at the basin 120 in order to initiate movement of the hood 136.
- At least one sensor 202 is provided within the scope of the present invention, which is configured to detect a manual force application to the covering device 134 and preferably also the direction of this force application.
- the hood 136 can be opened by a user when it is in the closed Position 135, can be slightly raised, i.e. moved in the opening movement direction 139, which is detected by the sensor 202.
- movements of 5 mm or more or movements greater than 5 mm can be detected as a desire to move the hood 136 in this direction.
- the hood 136 can be pulled slightly downwards in the closing movement direction 141 by a user when it is in the open position 137, which is detected by the sensor 202.
- the detection of this force application and, if applicable, the direction of this force application can then be converted by the controller 148 into a corresponding control command for the electromechanical drive 186 in order to subsequently support the movement of the hood 136 in the desired direction by the electromechanical drive 186 or even to carry it out exclusively by the electromechanical drive 186.
- the hood 136 itself can therefore be used as a type of control element 200 in that a request regarding a movement of the hood 136 is transmitted to the control 148 by means of a force application to this hood 136.
- the sensor 202 can generally be arranged at various locations within the cleaning device 110.
- the at least one sensor 202 can be arranged at one or more of the following locations: on the hood 136; on the guide element 150; on the guide rail 152; within the gear 184, for example, within the power transmission path 182 and/or at another location within the gear 184; in the electromechanical drive 186.
- the electromechanical drive 186 and/or the gear 184 can, for example, comprise at least one driven shaft 204, which is preferably rotatable by the electromechanical drive 186, preferably in both possible directions of rotation.
- the sensor 202 can, for example, comprise an incremental encoder 206, which can, for example, be arranged at a shaft end of the shaft 204.
- the sensor 202 can, for example, be connected wirelessly or by wire to the controller 148 in order to communicate with it unidirectionally or bidirectionally.
- the controller 148 can, for example, be configured to evaluate the information from the sensor 202 and issue corresponding control commands to the electromechanical drive 186.
- the electromechanical drive 186 can be connected directly or indirectly, for example wirelessly or by wire, to the controller 148.
- the controller 148 can be configured to start the electromechanical drive 186, influence its direction of rotation, or even its rotational speed. Other configurations are also possible.
- the controller 148 can, for example, be configured to programmatically evaluate signals and/or information from sensor 202, for example by using a threshold value method.
- a change in the position and/or an increment transmitted by sensor 202 can be monitored and compared, for example, with one or more threshold values.
- the monitoring described above can be carried out to determine whether the hood 136 has been moved by more than a predetermined distance due to the manual application of force, which can then be interpreted as a command for further movement in the direction of this application of force.
- the electromechanical drive 186 can be configured, in particular, as a DC geared motor.
- the DC geared motor can, for example, be designed so that it is not self-locking. This allows manual movement and/or the hood 136 can also be operated manually in the event of a malfunction.
- the motor can be moved along with it.
- the incremental encoder 206 can, for example, detect a rotary movement of the motor and the associated operating direction, and transmit these signals to the controller 148.
- the controller 148 can, for example, evaluate this signal, interpret the movement request, and then drive the motor in the appropriate direction.
- the cleaning device 110 can also have additional functions.
- it can be configured to carry out at least one cleaning program, for example, by means of a corresponding programming device of the controller 148. For example, after a closing movement, when the hood 136 is in the closed position 135, a rinsing program can be started automatically.
- the handle 140 is usually located in an ergonomically favorable position on the hood 136, for example in an ergonomically favorable position relative to a workstation at the basin 120. Operating personnel at this workstation can thus easily reach the handle 140 and thereby initiate the hood movement, even without visual contact with the controller 148 and/or corresponding operating elements 200.
- a teaching This is generally not necessary, since the hood movement is initiated intuitively with a corresponding movement of the handle 140. This results in a user-friendly and safe overall situation of the cleaning device 110.
Landscapes
- Washing And Drying Of Tableware (AREA)
- Cleaning By Liquid Or Steam (AREA)
Description
- Die Erfindung betrifft eine Reinigungsvorrichtung mit den Merkmalen des Anspruchs 1 und ein Verfahren zum Reinigen von Reinigungsgut mit den Merkmalen des Anspruchs 11. Derartige Reinigungsvorrichtungen und Verfahren können im Bereich der Geschirrspültechnik eingesetzt werden, insbesondere im gewerblichen Bereich der Großküchen und Einrichtungen der Gemeinschaftsverpflegung. Die Erfindung wird in Haubengeschirrspülmaschinen oder Durchschubgeschirrspülmaschinen eingesetzt.
- Aus dem Stand der Technik sind zahlreiche Reinigungsvorrichtungen und Verfahren zum Reinigen unterschiedlicher Arten von Reinigungsgut bekannt. Ohne Beschränkung weiterer möglicher Einsatzmöglichkeiten wird die Erfindung nachfolgend beschrieben im Hinblick auf die Geschirrspültechnik, also im Hinblick auf Reinigungsvorrichtungen in Form von Geschirrspülmaschinen. Insbesondere kann es sich dabei um gewerbliche Geschirrspülmaschinen handeln. Beispiele derartiger Geschirrspülmaschinen sind insbesondere die Gläser- und Geschirrspülmaschinen der Serie DV oder der Serie EcoStar der Meiko Maschinenbau GmbH & Co. KG, Offenburg, Deutschland, oder der Serie PT der Winterhalter Deutschland GmbH, Meckenbeuren, Deutschland. Auch in anderen Produkten ist die vorliegende Erfindung jedoch grundsätzlich einsetzbar.
- Bei bekannten Haubengeschirrspülmaschinen wird üblicherweise die Haube mittels einer geeigneten Führung geführt, wobei mittels entsprechender Griffe und/oder Hebel das Bedienpersonal die Haube von einer geschlossenen in eine geöffnete Position oder umgekehrt bewegen kann. Daneben sind allerdings auch automatische Haubengeschirrspülmaschinen bekannt, bei denen eine Haubenbewegung automatisch erfolgt, beispielsweise angetrieben durch einen Motor. Die Haubenbewegung wird dabei üblicherweise dadurch eingeleitet, dass über ein Bedienfeld der Haubengeschirrspülmaschinen ein entsprechendes Signal gegeben wird. Alternativ oder zusätzlich können auch separate Tasten oder Schalter vorgesehen sein. Nachteilig an derartigen Anordnungen ist jedoch, dass die Bedienelemente zwar grundsätzlich beliebig platzierbar sind, dass diese jedoch jeweils separat verdrahtet werden müssen, was in der Praxis aufwändig und kostenintensiv ist. Je nach den örtlichen Gegebenheiten und der jeweiligen Situation der Aufstellung der Geschirrspülmaschine sind die Betätigungselemente von der Bedienperson auch nicht immer gut zu erreichen. Bei einer Auslösung der Haubenbewegung lediglich über das Bedienfeld der Spülmaschine muss die Bedienperson zum Einleiten der Haubenbewegung ihre Arbeitsposition, welche sich meist seitlich der Geschirrspülmaschine beispielsweise an einem Becken mit einer Vorspülbrause befindet, verlassen.
- Aus dem Stand der Technik sind auch automatische Auslösevorgänge bekannt. Dazu werden verschiedene Sensoren in Haushaltsgeräten und Einrichtungsgegenständen eingesetzt, welche bestimmte Signale empfangen und dementsprechend einen Öffnungsvorgang einer Tür oder eines Auszugs initiieren. Beispielsweise ist aus
WO 2009/132813 A1 eine Geschirrspülmaschine mit einer als Berührungssensor ausgestalteten Dekorplatte bekannt. AusDE 10 2008 028 313 A1 ist ein kapazitiver Berührungsschalter für ein Haushaltsgerät bekannt.EP 2 428 153 B1 beschreibt ein Haushaltsgerät mit einem Türöffnungssensor zum Erkennen eines akustisch geäußerten Türöffnungswunsches.EP 2 497 405 A2 beschreibt ein Haushaltsgerät mit einem Klopfsensor, über welchen eine Klopfsignaleingabe ermöglicht wird.DE 10 2007 003 451 A1 undDE 20 2007 006 818 U1 beschreiben einen Schrank mit einem oder mehreren Auszügen und einem Raummikrofon sowie Festkörperschallsensoren.DE 10 2012 223 775 A1 beschreibt ein Haushaltsgerät mit einem Körperschallsensor, welcher eingerichtet ist, um einen Trittschall einer sich in einem Umgebungsbereich des Haushaltsgeräts bewegenden Person zu detektieren.DE 10 2014 007 172 A1 beschreibt ein elektronisches Haushaltsgerät mit einer Gestenerfassungseinrichtung. - Trotz der Vorteile, welche mit dieser verbesserten Sensorik verbunden sind, verbleiben zahlreiche technische Herausforderungen. So besteht eine Herausforderung beispielsweise darin, dass Signale in vielen Fällen nicht eindeutig sind oder nicht eindeutig interpretierbar sind. Insbesondere akustische Signale, haptische Signale oder auch Körperschall können im oftmals turbulenten Betrieb einer Großküche auch entstehen, ohne dass hiermit eine bestimmte Reaktion der Geschirrspülmaschine ausgelöst werden soll. Eine fehlerhaft ausgelöste Reaktion kann jedoch den Arbeitsablauf unterbrechen und somit zu unerwünschten Störungen führen. Weiterhin sind zahlreiche der genannten Sensoren kostenaufwändig und zudem empfindlich gegen Umgebungseinflüsse, was insbesondere im Hinblick auf die Arbeitsbedingungen in Großküchen oftmals eine technische Herausforderung darstellt.
- Es ist daher Aufgabe der vorliegenden Erfindung, eine Reinigungsvorrichtung und ein Verfahren zur Reinigung von Reinigungsgut, welche die Nachteile bekannter Vorrichtungen und Verfahren dieser Art zumindest weitgehend vermeiden, bereitzustellen. Insbesondere sollen eine Reinigungsvorrichtung und ein Verfahren bereitgestellt werden, welche auf einfache, kostengünstige und benutzerfreundliche Weise ein Öffnen oder ein Schließen einer Reinigungskammer der Reinigungsvorrichtung ermöglichen.
- Diese Aufgabe wird gelöst durch eine Reinigungsvorrichtung und ein Verfahren mit den Merkmalen der unabhängigen Patentansprüche. Vorteilhafte Weiterbildungen, welche einzeln oder in beliebiger Kombination realisierbar sind, sind in den abhängigen Ansprüchen dargestellt.
- Im Folgenden werden die Begriffe "haben", "aufweisen", "umfassen" oder "einschließen" oder beliebige grammatikalische Abweichungen davon in nicht-ausschließlicher Weise verwendet. Dementsprechend können sich diese Begriffe sowohl auf Situationen beziehen, in welchen, neben den durch diese Begriffe eingeführten Merkmalen, keine weiteren Merkmale vorhanden sind, oder auf Situationen, in welchen ein oder mehrere weitere Merkmale vorhanden sind. Beispielsweise kann sich der Ausdruck "A hat B", "A weist B auf", "A umfasst B" oder "A schließt B ein" sowohl auf die Situation beziehen, in welcher, abgesehen von B, kein weiteres Element in A vorhanden ist (d.h. auf eine Situation, in welcher A ausschließlich aus B besteht), als auch auf die Situation, in welcher, zusätzlich zu B, ein oder mehrere weitere Elemente in A vorhanden sind, beispielsweise Element C, Elemente C und D oder sogar weitere Elemente.
- Weiterhin wird darauf hingewiesen, dass die Begriffe "mindestens ein" und "ein oder mehrere" sowie grammatikalische Abwandlungen dieser Begriffe, wenn diese in Zusammenhang mit einem oder mehreren Elementen oder Merkmalen verwendet werden und ausdrücken sollen, dass das Element oder Merkmal einfach oder mehrfach vorgesehen sein kann, in der Regel lediglich einmalig verwendet werden, beispielsweise bei der erstmaligen Einführung des Merkmals oder Elementes. Bei einer nachfolgenden erneuten Erwähnung des Merkmals oder Elementes wird der entsprechende Begriff "mindestens ein" oder "ein oder mehrere" in der Regel nicht mehr verwendet, ohne Einschränkung der Möglichkeit, dass das Merkmal oder Element einfach oder mehrfach vorgesehen sein kann.
- Weiterhin werden im Folgenden die Begriffe "vorzugsweise", "insbesondere", "beispielsweise" oder ähnliche Begriffe in Verbindung mit optionalen Merkmalen verwendet, ohne dass alternative Ausführungsformen hierdurch beschränkt werden. So sind Merkmale, welche durch diese Begriffe eingeleitet werden, optionale Merkmale, und es ist nicht beabsichtigt, durch diese Merkmale den Schutzumfang der Ansprüche und insbesondere der unabhängigen Ansprüche einzuschränken. So kann die Erfindung, wie der Fachmann erkennen wird, auch unter Verwendung anderer Ausgestaltungen durchgeführt werden. In ähnlicher Weise werden Merkmale, welche durch "in einer Ausführungsform der Erfindung" oder durch "in einem Ausführungsbeispiel der Erfindung" eingeleitet werden, als optionale Merkmale verstanden, ohne dass hierdurch alternative Ausgestaltungen oder der Schutzumfang der unabhängigen Ansprüche eingeschränkt werden soll. Weiterhin sollen durch diese einleitenden Ausdrücke sämtliche Möglichkeiten, die hierdurch eingeleiteten Merkmale mit anderen Merkmalen zu kombinieren, seien es optionale oder nicht-optionale Merkmale, unangetastet bleiben.
- In einem ersten Aspekt der vorliegenden Erfindung wird eine Reinigungsvorrichtung zum Reinigen von Reinigungsgut vorgeschlagen. Unter einer Reinigungsvorrichtung ist allgemein im Rahmen der vorliegenden Erfindung eine Vorrichtung zu verstehen, bei welcher das Reinigungsgut mittels mindestens einem Reinigungsfluid gereinigt wird, um dieses zumindest teilweise von anhaftendem Schmutz und/oder anderen Verunreinigungen zu befreien. Das Reinigungsfluid kann insbesondere mindestens eine Reinigungsflüssigkeit umfassen. Zusätzlich kann die Reinigungsvorrichtung auch eine keimabtötende Wirkung oder sogar eine desinfizierende Wirkung auf das Reinigungsgut ausüben. Dementsprechend wird unter einem Verfahren zur Reinigung von Reinigungsgut, wie es in einem zweiten Aspekt der vorliegenden Erfindung vorgeschlagen wird, im Folgenden auch als Reinigungsverfahren bezeichnet, eine Beaufschlagung des Reinigungsguts mit mindestens einem Reinigungsfluid verstanden, zum Zweck einer zumindest teilweisen Entfernung von anhaftendem Schmutz von dem Reinigungsgut.
- Unter Reinigungsgut können dabei allgemein beliebige Güter verstanden werden, welche einer Reinigung oder einem Reinigungsverfahren unterzogen werden können, beispielsweise Industriegüter. Ohne Beschränkungen weiterer möglicher Ausgestaltungen wird dabei im Folgenden Bezug genommen auf Reinigungsgut in Form von Geschirr. Spülgut soll dabei grundsätzlich jegliche Gegenstände umfassen, welche zur Zubereitung, Aufbewahrung, Darreichung oder zum Transport von Speisen und/oder Getränken eingesetzt werden. Insbesondere kann es sich dabei um Spülgut handeln, ausgewählt aus der Gruppe bestehend aus Geschirr wie Tassen, Tellern, Gläsern, Schalen oder Schüsseln; Töpfen; Tabletts; Besteck; Warmhaltevorrichtungen; Behältern; Kisten; Körben. Auch andere Vorrichtungen, welche direkt oder indirekt zur Aufbereitung, Zubereitung, Transport oder Darreichung von Speisen und/oder Getränken oder Vorstufen von Speisen und/oder Getränken eingesetzt werden können, können eingesetzt werden. Die Reinigungsvorrichtung ist als Geschirrspülmaschine und als Haubengeschirrspülmaschine und/oder Durchschubgeschirrspülmaschine ausgestaltet.
- Die Reinigungsvorrichtung umfasst weiterhin mindestens eine Reinigungskammer und mindestens eine, die Reinigungskammer zumindest teilweise umschließende, Abdeckvorrichtung. Unter einer Reinigungskammer kann allgemein ein vollständig oder zumindest teilweise abgeschirmter Raum zu verstehen sein, in welchem eine Beaufschlagung des Reinigungsguts mit mindestens einem Reinigungsfluid und/oder mit mehreren Reinigungsfluids erfolgen kann. So kann innerhalb der Reinigungskammer beispielsweise mindestens eine Beaufschlagungsvorrichtung zur Beaufschlagung des Reinigungsguts mit dem mindestens einen Reinigungsfluid vorgesehen sein. Weiterhin kann innerhalb der Reinigungskammer auch eine vollständige oder teilweise Trocknung des Reinigungsguts erfolgen. Die Reinigungsvorrichtung kann insbesondere als Einkammer-Reinigungsvorrichtung ausgestaltet sein. Das Reinigungsgut kann im Folgenden auch als Spülgut bezeichnet werden, und die Reinigungskammer kann auch als Spülkammer bezeichnet werden.
- Die Reinigungsvorrichtung weist, wie oben ausgeführt, mindestens eine die Reinigungskammer zumindest teilweise umschließende Abdeckvorrichtung auf. Unter einer Abdeckvorrichtung sind dabei allgemein eine Vorrichtung oder ein Element zu verstehen, welches die Reinigungskammer zumindest teilweise begrenzt und gleichzeitig einen Zugang zu der Reinigungskammer ermöglicht, beispielsweise zum Bestücken der Reinigungskammer mit Reinigungsgut oder zum Entnehmen des Reinigungsguts aus der Reinigungskammer.
- Die Abdeckvorrichtung ist, wie unten noch näher ausgeführt wird, als Haube ausgestaltet, welche in einer vertikalen Richtung verschiebbar gelagert ist. Die Abdeckvorrichtung umfasst eine Haube, welche nach oben hin verschoben werden kann, um die Reinigungskammer zu öffnen, und welche nach unten hin verschoben werden kann, um gemeinsam mit einer Basis der Reinigungsvorrichtung die Reinigungskammer abzuschließen.
- Die Abdeckvorrichtung ist über mindestens ein Getriebe mittels mindestens eines elektromechanischen Antriebs in einer Öffnungsbewegungsrichtung von einer geschlossenen Position in eine geöffnete Position oder in einer Schließbewegungsrichtung von einer geöffneten Position in eine geschlossene Position bewegbar. So ist die Abdeckvorrichtung allgemein bewegbar gelagert, so dass diese in mindestens zwei verschiedene Positionen bringbar ist, nämlich in eine geöffnete Position und eine geschlossene Position. Auch Zwischenpositionen sind möglich. Die Mehrzahl der möglichen Stellungen zwischen der geöffneten Position und der geschlossenen Position, optional einschließlich der geöffneten Position und der geschlossenen Position, kann auch als Öffnungsweg bezeichnet werden.
- Unter einem "Getriebe" kann im Rahmen der vorliegenden Erfindung allgemein ein Maschinenelement verstanden werden, mittels dessen eine Kraft- und/oder Drehmomentübertragung zwischen einem Antrieb und einem angetriebenen Element erfolgen kann. Insbesondere können mittels eines Getriebes auch Bewegungsgrößen geändert werden. Beispielsweise kann eine Änderung einer Kraft oder eines Drehmoments mittels des Getriebes erfolgen. Insbesondere kann eine zu ändernde Bewegung eine Drehbewegung sein. Das Getriebe kann insbesondere somit auch einen Drehmomentwandler umfassen.
- Das Getriebe kann insbesondere mindestens ein Zugmittelgetriebe umfassen, insbesondere mindestens ein Kettengetriebe. Unter einem Zugmittelgetriebe ist dabei allgemein ein Getriebe zu verstehen, bei welchem ein Drehmoment zwischen zwei Elementen, beispielsweise zwischen mindestens einer Welle und mindestens einem weiteren Element, insbesondere auch zwischen zwei Wellen, mit Hilfe eines Zugmittels übertragen wird, beispielsweise eines die mindestens eine Welle umschlingenden Zugmittels. Unter einem Zugmittel kann allgemein ein verformbares, beispielsweise biegbares oder dehnbares langgestrecktes Element verstanden werden, mittels dessen eine Zugkraft übertragbar ist. Beispielsweise kann die Kraftübertragungsstrecke mindestens ein Zugmittel aufweisen, insbesondere ein biegbares Zugmittel. Das Zugmittel kann insbesondere ausgewählt sein aus der Gruppe bestehend aus: einer Kette, insbesondere einer Rollenkette, einer Bolzenkette oder einer Gliederkette; einem Seil und/oder Seilzug; einem elastischen Band; einem Riemen, insbesondere einem Zahnriemen oder einem Keilriemen. Auch andere Zugmittel sind jedoch grundsätzlich einsetzbar.
- Unter einem "elektromechanischen Antrieb" ist dabei allgemein im Rahmen der vorliegenden Erfindung eine Vorrichtung zu verstehen, welche eingerichtet ist, um elektrische Energie in mindestens eine mechanische Bewegung, insbesondere eine lineare Bewegung und/oder eine Drehbewegung, umzusetzen. Insbesondere kann der elektromechanische Antrieb mindestens einen Motor aufweisen, wie unten noch näher erläutert wird. Beispielsweise kann der elektromechanische Antrieb über das Getriebe an die Abdeckvorrichtung gekoppelt sein, um die Abdeckvorrichtung in der Öffnungsbewegungsrichtung zu bewegen, also vollständig oder teilweise zu öffnen, und in der Schließbewegungsrichtung zu bewegen, also vollständig oder teilweise zu schließen. Alternativ oder zusätzlich zur Verwendung eines Motors können jedoch auch andere Arten von elektromechanischen Antrieben eingesetzt werden, beispielsweise mindestens ein Antrieb ausgewählt aus der Gruppe bestehend aus einem hydraulischen Antrieb, einem elektrohydraulischen Antrieb, einem pneumatischen Antrieb oder einem elektropneumatischen Antrieb. Auch andere Ausgestaltungen sind jedoch denkbar.
- Die Reinigungsvorrichtung weist weiterhin einen Sensor auf. Der Sensor ist eingerichtet, um einen manuellen Kraftangriff an der Abdeckvorrichtung in der Öffnungsbewegungsrichtung oder in der Schließbewegungsrichtung zu erkennen. Die Reinigungsvorrichtung ist eingerichtet, um entsprechend der Erkennung des manuellen Kraftangriffs den elektromechanischen Antrieb anzusteuern.
- Unter einem "Sensor" im Sinne der vorliegenden Erfindung ist grundsätzlich ein beliebiges Element zu verstehen, welches eingerichtet ist, um mindestens eine Messgröße zu erfassen und mindestens ein entsprechendes Signal zu generieren, beispielsweise ein elektrisches Signal, beispielsweise ein analoges und/oder ein digitales Signal. Der mindestens eine Sensor kann insbesondere mindestens einen Sensor umfassen, ausgewählt aus der Gruppe bestehend aus einem Bewegungssensor, einem Drucksensor, einem Zugsensor, einem Dehnungssensor, einem Inkrementalgeber, einem Stellglied, einem optischen Sensor, einem mechanischen Sensor, einem pneumatischen Sensor, einem hydraulischen Sensor, einem elektromagnetischen Sensor, einem magnetischen Sensor, einem elektrischen Sensor. Auch andere Sensoren oder Kombinationen der genannten Sensoren sind grundsätzlich möglich. Der mindestens eine Sensor kann insbesondere mindestens einen Winkelstellungssensor umfassen, welcher mindestens eine Winkelstellung mindestens einer Welle überwacht, welche mit dem elektromechanischen Antrieb, insbesondere dem Motor, verbunden ist.
- Unter einem "manuellen Kraftangriff" im Sinne der vorliegenden Erfindung ist grundsätzlich eine beliebige Einwirkung oder Ausübung einer Kraft durch eine menschliche Person, insbesondere einen Benutzer, zu verstehen. Hierbei kann es sich beispielsweise um eine Druckkraft oder auch um eine Zugkraft handeln. Eine Erkennung des manuellen Kraftangriffs an der Abdeckvorrichtung, also einer auf die Abdeckvorrichtung einwirkenden Kraft, kann beispielsweise direkt oder auch indirekt erfolgen. Eine direkte Erkennung umfasst dabei beispielsweise eine auf die Abdeckvorrichtung einwirkende Zug-und/oder DruccKraft. Eine indirekte Erkennung umfasst dabei beispielsweise eine durch die ausgeübte Kraft hervorgerufene Wirkung, beispielsweise eine Bewegung, beispielsweise eine Bewegung der Abdeckvorrichtung und/oder mindestens eines mit der Abdeckvorrichtung verbundenen Elements, beispielsweise des Getriebes oder eines Teils davon und/oder des elektromechanischen Antriebs oder eines Teils davon, beispielsweise eines Motors oder einer Welle, welches mit dem Motor verbunden ist. Der manuelle Kraftangriff kann vollständig oder teilweise direkt an der Abdeckvorrichtung erfolgen und/oder vollständig oder teilweise indirekt, beispielsweise über mindestens ein mit der Abdeckvorrichtung verbundenes Element, beispielsweise einen Griff.
- Der manuelle Kraftangriff, welcher erkannt wird, erfolgt in der Öffnungsbewegungsrichtung oder in der Schließbewegungsrichtung. Dies bedeutet, dass die Kraft, welche durch den Benutzer manuell ausgeübt wird, mindestens eine Kraftkomponente in der Öffnungsbewegungsrichtung aufweist und vorzugsweise parallel zu der Öffnungsbewegungsrichtung orientiert ist, oder mindestens eine Kraftkomponente in der Schließbewegungsrichtung aufweist und vorzugsweise parallel zu der Schließbewegungsrichtung ausgerichtet ist. So kann beispielsweise im Falle einer Haube eine Kraft in vertikaler Richtung nach oben oder nach unten ausgeübt werden, so dass sich beispielsweise die Haube geringfügig durch den manuellen Kraftangriff hebt oder senkt, was durch den Sensor erkannt werden kann.
- Wie oben ausgeführt, ist die Reinigungsvorrichtung eingerichtet, um entsprechend der Erkennung des manuellen Kraftangriffs den elektromechanischen Antrieb anzusteuern. Unter einer "Ansteuerung" ist dabei im Rahmen der vorliegenden Erfindung grundsätzlich eine Art des Betriebs des elektromechanischen Antriebs zu verstehen, insbesondere ein Starten des elektromechanischen Antriebs, ein Stoppen des elektromechanischen Antriebs, eine Änderung einer Antriebsgeschwindigkeit des elektromechanischen Antriebs, beispielsweise eine Rotationsgeschwindigkeit eines Motors, oder eine Änderung der Richtung des elektromechanischen Antriebs, beispielsweise eine Änderung einer Rotationsrichtung eines Motors. Die Ansteuerung kann beispielsweise durch eine Steuerung der Reinigungsvorrichtung erfolgen, welche direkt oder indirekt auf den elektromechanischen Antrieb einwirkt, um die Ansteuerung, beispielsweise gemäß einer oder mehreren der genannten Arten, zu bewirken.
- Unter einer Ansteuerung "entsprechend der Erkennung des manuellen Kraftangriffs" ist dabei grundsätzlich im Rahmen der vorliegenden Erfindung zu verstehen, dass die Ansteuerung bei Erkennung des manuellen Kraftangriffs geändert werden kann. Beispielsweise kann die Ansteuerung geändert werden, wenn erkannt wird, dass ein manueller Kraftangriff erfolgt, und/oder die Art der Ansteuerung kann geändert werden, wenn erkannt wird, dass ein manueller Kraftangriff erfolgt. Alternativ oder zusätzlich kann die Ansteuerung auch geändert werden entsprechend der Richtung des manuellen Kraftangriffs.
- Wie unten noch näher ausgeführt wird, kann beispielsweise eine durch den manuellen Kraftangriff bewirkte Bewegung der Abdeckvorrichtung erkannt und deren Richtung bestimmt werden. Entsprechend wird dann der elektromechanische Antrieb derart angesteuert, dass dieser die Bewegung der Abdeckvorrichtung alleine ohne weitere manuelle Krafteinwirkung fortsetzt, bis diese Bewegung ihr Ende, also die geöffnete Position oder geschlossene Position, erreicht hat. So wird bei der Haubengeschirrspülmaschine mittels des mindestens einen Sensors erkannt, wenn bei der Haube in geschlossener Position ein Benutzer manuell die Haube beginnt zu öffnen, beispielsweise die Haube geringfügig nach oben bewegt. Der elektromechanische Antrieb, beispielsweise der Motor, wird dann derart angesteuert, dass diese Öffnungsbewegung ausschließlich durch den elektromechanischen Antrieb fortgesetzt wird, bis die geöffnete Position erreicht ist. Wird hingegen, alternativ oder zusätzlich, mittels des mindestens einen Sensors erkannt, dass bei der Haube in geöffneter Position ein Benutzer manuell die Haube beginnt zu schließen, beispielsweise indem der Benutzer die Haube geringfügig nach unten bewegt, so wird der elektromechanische Antrieb, beispielsweise der Motor, derart angesteuert, dass diese Schließbewegung ausschließlich durch den elektromechanischen Antrieb fortgesetzt wird bis die Haube die geschlossene Position erreicht hat. Unter einer Öffnungsbewegung ist dabei allgemein eine Bewegung in der Öffnungsbewegungsrichtung zu verstehen, und unter einer Schließbewegung allgemein eine Bewegung in der Schließbewegungsrichtung.
- Die Reinigungsvorrichtung ist eine Geschirrspülmaschine. Die Geschirrspülmaschine ist ausgewählt aus der Gruppe bestehend aus einer Haubengeschirrspülmaschine und einer Durchschubgeschirrspülmaschine. Unter einer Haubengeschirrspülmaschine ist dabei allgemein eine Geschirrspülmaschine zu verstehen, welche eine Basis aufweist, die eine Unterseite der Spülkammer bereitstellt, und mindestens eine Haube oder einen Haubenmantel als Abdeckvorrichtung, welche ganz oder teilweise mindestens eine Seitenwand der Reinigungskammer sowie optional mindestens einen Deckel der Reinigungskammer bilden und welche nach oben oder nach unten aufgefahren werden können, um die Reinigungskammer freizugeben. Unter einer Durchschubgeschirrspülmaschine ist allgemein eine Geschirrspülmaschine zu verstehen, welche mindestens eine Durchschubvorrichtung aufweist, mittels derer, beispielsweise von einer Einschubseite her, Reinigungsgut, beispielsweise ein Korb mit Reinigungsgut, in die Spülkammer eingeschoben werden kann, beispielsweise bei geöffneter Haube, und bei der auf einer zweiten Seite, beispielsweise einer Entnahmeseite, das Reinigungsgut wieder aus der Reinigungskammer herausgeschoben werden kann, nach erfolgtem Reinigungsprozess. Im praktischen Sprachgebrauch wird der Begriff der Durchschubgeschirrspülmaschine häufig auch als Oberbegriff verwendet und umfasst beispielsweise auch Haubengeschirrspülmaschinen mit Durchschubvorrichtung. Durchschubgeschirrspülmaschinen umfassen in der Regel keine aktive Durchschubvorrichtung sondern einen manuellen Geschirrdurchschub. Die Durchschubvorrichtung umfasst beispielsweise Gleitschienen und/oder Führungen. Für Beispiele derartiger Haubengeschirrspülmaschinen kann auf den oben genannten Stand der Technik verwiesen werden.
- Die Reinigungsvorrichtung kann, wie oben ausgeführt, weiterhin insbesondere mindestens eine Beaufschlagungsvorrichtung zur Beaufschlagung des Reinigungsguts in der Reinigungskammer mit mindestens einem Reinigungsfluid umfassen. Beispielsweise können in der Reinigungskammer eine oder mehrere Reinigungsdüsen vorgesehen sein, über welche das Reinigungsfluid auf das Reinigungsgut aufgespritzt und/oder aufgesprüht und/oder aufgetropft werden kann. Insbesondere können auch ein oder mehrere Sprüharme vorgesehen sein, insbesondere rotierende Sprüharme.
- Die Reinigungsvorrichtung kann weiterhin mindestens einen von der Reinigungskammer getrennt ausgebildeten Aufbereitungstank, insbesondere mindestens einen Boiler, aufweisen. In dem Aufbereitungstank kann eine Nachspülflüssigkeit temperierbar sein, während in der Reinigungskammer ein Spülvorgang abläuft. So kann die Reinigungsvorrichtung insbesondere als gewerbliche Geschirrspülmaschine ausgestaltet sein.
- Die Öffnungsbewegungsrichtung und die Schließbewegungsrichtung weisen jeweils mindestens eine vertikale Richtungskomponente auf. Vorzugsweise weist die Abdeckvorrichtung in der geschlossenen Position und der geöffneten Position unterschiedliche potenzielle Energie, insbesondere unterschiedliche Lageenergie, auf. So kann die Abdeckvorrichtung in der geöffneten Position insbesondere zumindest teilweise oberhalb der geschlossenen Position angeordnet sein.
- Die Abdeckvorrichtung kann insbesondere eine lineare bewegliche Abdeckvorrichtung sein oder umfassen. Die Abdeckvorrichtung kann insbesondere zwischen der geöffneten Position und der geschlossenen Position oder umgekehrt ausschließlich eine Linearbewegung durchführen, ohne dass eine Rotationskomponente vorliegt. Dies ist insbesondere bei Haubengeschirrspülmaschinen üblicher Bauart der Fall. Auch andere Ausgestaltungen mit einer oder mehreren Rotationskomponenten oder mit einer ausschließlich rotatorischen Bewegung sind jedoch grundsätzlich möglich. Die Reinigungsvorrichtung kann insbesondere mindestens eine lineare Führung für die Abdeckvorrichtung aufweisen, insbesondere eine Führungsschiene und/oder eine Führungsstange.
- Die Reinigungsvorrichtung kann insbesondere mindestens eine Steuerung aufweisen. Unter einer "Steuerung" ist dabei grundsätzlich im Rahmen der vorliegenden Erfindung eine Vorrichtung zu verstehen, welche eingerichtet ist, um mindestens eine Funktion der Reinigungsvorrichtung zu beeinflussen. Beispielsweise kann die Steuerung mindestens eine elektrische Steuerung umfassen, insbesondere eine elektrische Steuerung mit mindestens einer Datenverarbeitungsvorrichtung. Beispielsweise kann die Steuerung mindestens einen Prozessor, mindestens einen Mikrocomputer oder mindestens einen anwendungsspezifischen integrierten Schaltkreis umfassen. Auch andere Ausgestaltungen sind möglich. Die Steuerung kann insbesondere programmtechnisch eingerichtet sein, um mindestens eine Funktion der Reinigungsvorrichtung, beispielsweise mindestens einen Programmablauf mindestens eines Reinigungsprogramms, zu steuern. Die Steuerung kann weiterhin mindestens eine Benutzerschnittstelle umfassen, beispielsweise mindestens eine Eingabevorrichtung, die es einem Benutzer ermöglicht, mindestens einen Befehl und/oder mindestens eine Information an die Steuerung zu übermitteln. Beispielsweise kann die Benutzerschnittstelle mindestens eine Tastatur und/oder mindestens eine Taste und/oder mindestens einen Schalter umfassen. Weiterhin kann die Benutzerschnittstelle mindestens eine Ausgabevorrichtung umfassen, beispielsweise mindestens ein Display und/oder mindestens eine Anzeigevorrichtung. Weiterhin kann die Steuerung mindestens eine elektronische Schnittstelle umfassen, beispielsweise mindestens eine drahtlose oder auch drahtgebundene Schnittstelle. Die Steuerung kann beispielsweise eine zentrale Maschinensteuerung sein oder umfassen, mittels derer ein oder mehrere Reinigungsprogramme, insbesondere ein oder mehrere Spülprogramme, steuerbar sind. Beispielsweise kann die Steuerung eingerichtet sein, um mindestens einen Spülvorgang, mindestens einen Nachspülvorgang und optional mindestens einen Trocknungsvorgang zu steuern.
- Die Steuerung ist eingerichtet, um den elektromechanischen Antrieb anzusteuern. So kann beispielsweise die Steuerung eingerichtet sein, um, beispielsweise durch Übermittlung eines entsprechenden elektrischen Signals, den elektromechanischen Antrieb zu starten, zu stoppen, eine Bewegungsrichtung des elektromechanischen Antriebs zu bestimmen oder umzukehren, eine Geschwindigkeit des elektromechanischen Antriebs zu bestimmen oder auch eine Kombination der genannten Beeinflussungen durchzuführen. Beispielsweise kann die Steuerung über mindestens eine Schnittstelle, beispielsweise drahtgebunden oder drahtlos, mit dem elektromechanischen Antrieb verbunden sein.
- Die Reinigungsvorrichtung, insbesondere die Steuerung, kann insbesondere in mindestens einer der folgenden Weisen eingerichtet sein:
- die Reinigungsvorrichtung, insbesondere die Steuerung, ist eingerichtet, um einen manuellen Kraftangriff in der Öffnungsbewegungsrichtung zu erkennen und den elektromechanischen Antrieb derart anzusteuern, dass die Abdeckvorrichtung in der Öffnungsbewegungsrichtung bewegt wird; und/oder
- die Reinigungsvorrichtung, insbesondere die Steuerung, ist eingerichtet, um einen manuellen Kraftangriff in der Schließbewegungsrichtung zu erkennen und den elektromechanischen Antrieb derart anzusteuern, dass die Abdeckvorrichtung in der Schließbewegungsrichtung bewegt wird.
- Wie oben ausgeführt, kann auf diese Weise eine erkannte, Benutzer-induzierte Öffnungs-oder Schließbewegung durch den elektromechanischen Antrieb eigenständig fortgesetzt werden, beispielsweise bis zu der geöffneten Position oder bis zu der geschlossenen Position.
- Wie oben ausgeführt, kann der elektromechanische Antrieb insbesondere mindestens einen Motor umfassen, insbesondere einen elektrischen Motor, insbesondere einen Getriebemotor. Der Motor kann insbesondere ein Gleichstrom-Getriebemotor sein. Auch andere Ausgestaltungen sind jedoch grundsätzlich möglich.
- Der Motor kann insbesondere ein nicht-selbsthemmender Motor sein, beispielsweise ein nicht-selbsthemmender elektrischer Motor, vorzugsweise ein nicht-selbsthemmender Gleichstrommotor. Unter einem "nicht-selbsthemmenden" Motor ist dabei allgemein ein Motor zu verstehen, welcher, wenn dieser nicht angesteuert wird und beispielsweise nicht bestromt wird, eine Bewegung seiner Antriebsachse oder Antriebswelle zulässt. Auf diese Weise kann beispielsweise eine initiale manuelle Bewegung der Abdeckvorrichtung initiiert werden, ohne dass der Motor diese Bewegung signifikant hemmt. Insbesondere kann die Reinigungsvorrichtung derart eingerichtet sein, dass durch den manuellen Kraftangriff an der Abdeckvorrichtung der Motor mitbewegt wird, wobei der Sensor eingerichtet ist, um eine Bewegung des Motors zu erkennen, insbesondere eine Drehbewegung. Beispielsweise kann der Sensor, wie oben ausgeführt, mindestens einen Inkrementalgeber umfassen, welcher eine Drehbewegung des Motors, die durch die manuelle Bewegung der Abdeckvorrichtung induziert wird, erkennt. Unter einem "Inkrementalgeber" im Sinne der vorliegenden Erfindung ist insbesondere ein Sensor zu verstehen, welcher eingerichtet ist, um Lageänderungen, insbesondere Lageänderungen bei einer linearen Bewegung der Abdeckvorrichtung und/oder des elektromechanischen Antriebs, und/oder Winkeländerungen, beispielsweise Winkeländerungen bei einer Drehbewegung der Abdeckvorrichtung und/oder des elektromechanischen Antriebs, insbesondere des Motors, zu erfassen. Auch andere Ausgestaltungen sind jedoch grundsätzlich möglich.
- Wie oben ausgeführt, kann der Sensor insbesondere auch eingerichtet sein, um eine Richtung des manuellen Kraftangriffs zu erkennen. Diese Richtungserkennung kann insbesondere genutzt werden, um die erkannte, Benutzer-induzierte Bewegung in der vom Benutzer gewünschten Richtung zu unterstützen oder sogar eigenständig fortzusetzen, mittels des elektromechanischen Antriebs.
- Der mindestens eine Sensor kann allgemein an verschiedenen Stellen der Reinigungsvorrichtung angeordnet sein, um die genannte Funktion zu erfüllen. Auch eine Kombination von Sensoren ist grundsätzlich möglich. Insbesondere kann der Sensor verbunden sein mit mindestens einem Element ausgewählt aus der Gruppe bestehend aus: der Abdeckvorrichtung, dem Getriebe, dem elektromechanischen Antrieb. So kann der Sensor insbesondere mindestens einen mit dem elektromechanischen Antrieb verbundenen Inkrementalgeber aufweisen.
- Der Sensor ist eingerichtet, um den manuellen Kraftangriff an der Abdeckvorrichtung aufgrund einer Bewegung zu erfassen. So kann, wie oben ausgeführt, der manuelle Kraftangriff an der Abdeckvorrichtung insbesondere eine Bewegung der Abdeckvorrichtung initiieren, vorzugsweise eine minimale Bewegung, beispielsweise eine lineare Bewegung von 50 mm oder weniger, insbesondere 30 mm oder weniger, beispielsweise 10 mm oder weniger, insbesondere 5 mm oder weniger. Aufgrund dieser bevorzugten Geringfügigkeit der Bewegung kann ein Kraftaufwand, welcher für einen Benutzer erforderlich ist, um die Bewegung zu initiieren, so gering wie möglich gehalten werden. Die Bewegung kann insbesondere ausgewählt sein aus einer Bewegung der Abdeckvorrichtung, einer Bewegung des Getriebes und einer Bewegung des elektromechanischen Antriebs. Auch Kombinationen sind möglich.
- Zur Erkennung der Bewegung kann insbesondere ein Schwellwertverfahren verwendet werden. So kann beispielsweise erkannt werden, ob, aufgrund des manuellen Kraftangriffs, sich die Abdeckvorrichtung um mehr als einen vorgegebenen Schwellwert oder um mindestens einen vorgegebenen Schwellwert bewegt, beispielsweise nach oben oder nach unten, beispielsweise in Öffnungsrichtung oder in Schließrichtung. Die Erkennung der Bewegung kann insbesondere allgemein mit einer Abfrage verbunden sein, ob der elektromechanische Antrieb gerade angesteuert wird, um die Abdeckvorrichtung zu bewegen, oder nicht. So kann die Reinigungsvorrichtung beispielsweise derart eingerichtet sein, dass, wenn eine Bewegung um mindestens einen vorgegebenen Schwellwert oder um mehr als einen vorgegebenen Schwellwert erkannt wird, dies lediglich dann als Bewegung aufgrund des manuellen Kraftangriffs erkannt wird, wenn nicht gleichzeitig ein Antrieb der Abdeckvorrichtung durch den elektromechanischen Antrieb vorliegt. Lediglich dann kann beispielsweise die Steuerung diese Bewegung als Wunsch eines Benutzers zur Durchführung einer Öffnungs-oder Schließbewegung interpretieren.
- Allgemein kann also die Reinigungsvorrichtung insbesondere eingerichtet sein, um die Bewegung mit mindestens einem Schwellwert zu vergleichen, beispielsweise indem eine zurückgelegte Bewegungstrecke oder ein zurückgelegter Winkel der Abdeckvorrichtung, des Getriebes oder des elektromechanischen Antriebs mit dem mindestens einen Schwellwert verglichen wird, um den manuellen Kraftangriff an der Abdeckvorrichtung zu erkennen. Zusätzlich kann, wie oben ausgeführt, als weitere Randbedingung erkannt werden, ob der elektromechanische Antrieb sich in Betrieb befindet oder nicht, so dass beispielsweise durch den elektromechanischen Antrieb induzierte Bewegungen ausgeschlossen werden können.
- Das Getriebe kann insbesondere mindestens ein Zugmittelgetriebe umfassen, insbesondere mindestens ein Kettengetriebe. Unter einem Zugmittelgetriebe ist dabei allgemein ein Getriebe zu verstehen, bei welchem ein Drehmoment zwischen zwei Elementen, beispielsweise zwischen mindestens einer Welle und mindestens einem weiteren Element, insbesondere auch zwischen zwei Wellen, mit Hilfe eines Zugmittels übertragen wird, beispielsweise eines die mindestens eine Welle umschlingenden Zugmittels. Unter einem Zugmittel kann allgemein ein verformbares, beispielsweise biegbares oder dehnbares langgestrecktes Element verstanden werden, mittels dessen eine Zugkraft übertragbar ist. Beispielsweise kann die Kraftübertragungsstrecke mindestens ein Zugmittel aufweisen, insbesondere ein biegbares Zugmittel. Das Zugmittel kann insbesondere ausgewählt sein aus der Gruppe bestehend aus: einer Kette, insbesondere einer Rollenkette, einer Bolzenkette oder einer Gliederkette; einem Seil und/oder Seilzug; einem elastischen Band; einem Riemen, insbesondere einem Zahnriemen oder einem Keilriemen. Auch andere Zugmittel sind jedoch grundsätzlich einsetzbar.
- Der oben genannte mindestens eine Sensor der Reinigungsvorrichtung kann grundsätzlich an mindestens einer beliebigen Stelle innerhalb der Reinigungsvorrichtung angeordnet sein, welche geeignet ist, um den manuellen Kraftangriff an der Abdeckvorrichtung in der Öffnungsbewegungsrichtung oder in der Schließbewegungsrichtung zu erkennen. Sind beispielsweise ein Getriebe und/oder eine Kraftübertragungsstrecke in der Reinigungsvorrichtung umfasst, so kann der mindestens eine Sensor beispielsweise an einer beliebigen Stelle innerhalb dieses Getriebes und/oder innerhalb dieser Kraftübertragungsstrecke angeordnet sein. So kann der Sensor beispielsweise vergleichsweise weit vorne in der gesamten Kraftübertragung angeordnet sein, beispielsweise als Dehn-Mess-Streifen, welcher beispielsweise an einem Gestänge oder an einer ersten Kette angeordnet sein kann. Dadurch sind an der Abdeckvorrichtung relativ kleine Wege erforderlich um den Kraftangriff zu erkennen. Diese Ausgestaltung kann beispielsweise auch in Kombination mit einem Antriebsmotor eingesetzt werden, welcher selbsthemmend ist. Auch andere Ausgestaltungen sind jedoch grundsätzlich möglich.
- Die Reinigungsvorrichtung kann weiterhin zusätzliche Funktionen aufweisen. So kann die Reinigungsvorrichtung beispielsweise weiterhin eingerichtet sein, um nach Durchführung einer Schließbewegung, nachdem die Abdeckvorrichtung die geschlossene Position erreicht hat, mindestens ein Reinigungsprogramm, insbesondere mindestens ein Spülprogramm, zu starten. Beispielsweise kann sich bei einer Haubengeschirrspülmaschine die Haube nach dem Schließen in der geschlossenen Position, insbesondere der unteren Endposition, befinden, und es kann dann, zusätzlich, automatisch ein Spülprogramm gestartet werden, insbesondere wenn die Steuerung entsprechend parametriert ist.
- Wie oben ausgeführt, wird in einem zweiten Aspekt der vorliegenden Erfindung ein Verfahren zum Reinigen von Reinigungsgut vorgeschlagen. Das Verfahren kann insbesondere unter Verwendung der Reinigungsvorrichtung gemäß der vorliegenden Erfindung, insbesondere gemäß einer oder mehreren der oben beschriebenen Ausgestaltungen und/oder gemäß einer oder mehreren der nachfolgend noch näher beschriebenen Ausgestaltungen, durchgeführt werden. Dementsprechend kann für mögliche Definitionen und/oder Optionen des Verfahrens auf die Beschreibung der Reinigungsvorrichtung verwiesen werden.
- Das Verfahren umfasst verschiedene Verfahrensschritte, welche beispielsweise in der genannten Reihenfolge durchgeführt werden können. Auch eine andere Reihenfolge ist jedoch grundsätzlich möglich. Weiterhin kann das Verfahren zusätzliche, nicht genannte Verfahrensschritte umfassen. Weiterhin können auch einer oder mehrere oder auch alle der Verfahrensschritte wiederholt und/oder kontinuierlich durchgeführt werden. Weiterhin können zwei oder mehrere der genannten Verfahrensschritte oder auch alle der genannten Verfahrensschritte auch zeitgleich oder zeitlich überlappend durchgeführt werden.
- Bei dem Verfahren wird mindestens eine die Reinigungskammer zumindest teilweise umschließende Abdeckvorrichtung verwendet. Die Abdeckvorrichtung ist über mindestens ein Getriebe mittels mindestens eines elektromechanischen Antriebs in einer Öffnungsbewegungsrichtung von einer geschlossenen Position in eine geöffnete Position oder in einer Schließbewegungsrichtung von einer geöffneten Position in eine geschlossene Position bewegbar.
- Das Verfahren umfasst eine Erkennung eines manuellen Kraftangriffs an der Abdeckvorrichtung in der Öffnungsbewegungsrichtung oder in der Schließbewegungsrichtung mittels mindestens eines Sensors. Das Verfahren umfasst weiterhin eine Ansteuerung des elektromechanischen Antriebs entsprechend der Erkennung des manuellen Kraftangriffs.
- Das Verfahren kann weiterhin eine Beaufschlagung des Reinigungsguts in der Reinigungsvorrichtung mittels mindestens eines Reinigungsfluid umfassen, beispielsweise mittels mindestens einer Beaufschlagungsvorrichtung. Diese Beaufschlagung kann beispielsweise erfolgen, nachdem die Abdeckvorrichtung in der Schließbewegungsrichtung in die geschlossene Position gebracht wurde.
- Wie oben ausgeführt, kann die Ansteuerung des elektromechanischen Antriebs insbesondere mindestens einen der folgenden Schritte umfassen: bei einer Erkennung eines manuellen Kraftangriffs in der Öffnungsbewegungsrichtung eine Ansteuerung des elektromechanischen Antriebs derart, dass die Abdeckvorrichtung in der Öffnungsbewegungsrichtung bewegt wird; bei einer Erkennung eines manuellen Kraftangriffs in der Schließbewegungsrichtung eine Ansteuerung des elektromechanischen Antriebs derart, dass die Abdeckvorrichtung in der Schließbewegungsrichtung bewegt wird.
- Die Reinigungsvorrichtung und das Verfahren weisen gegenüber bekannten Vorrichtungen und Verfahren der genannten Art zahlreiche Vorteile auf. So lässt sich auf einfache Weise eine Unterstützung einer Öffnungs- oder Schließbewegung einer Abdeckvorrichtung implementieren, ohne dass hierdurch ein erheblicher zusätzlicher apparativer Aufwand erforderlich wäre. Insbesondere können zusätzliche Schalter, Tasten, Näherungssensoren oder ähnliche aufwändige Sensoren, die einen Benutzerwunsch hinsichtlich einer Öffnung oder eines Schließens der Abdeckvorrichtung signalisieren, entfallen. Damit erübrigen sich auch die Problematik der Verkabelung derartiger Schalter oder Tasten oder Sensoren sowie die Problematik der Anordnung dieser Vorrichtungen.
- Der Sensor ist hingegen leicht zu implementieren. Der Sensor kann auch in Mehrfachfunktion genutzt werden. So lassen sich beispielsweise Inkrementalgeber leicht in Getriebe oder in Motoren implementieren. Derartige Inkrementalgeber können beispielsweise auch genutzt werden, um eine Funktionalität des Motors zu überwachen.
- Die Bedienung kann sehr intuitiv gestaltet werden, da der Benutzer ohnehin für ein Öffnen oder ein Schließen in der Regel an der Abdeckvorrichtung selbst angreift. Dieser Angriff kann erkannt werden und automatisch unterstützt werden. Der Benutzer ist sich möglicherweise nicht einmal darüber im Klaren, dass er mit seinem Kraftangriff an der Abdeckvorrichtung einen Schaltvorgang auslöst, durch welchen die Bewegung der Abdeckvorrichtung unterstützt oder automatisch von dem elektromechanischen Antrieb übernommen wird.
- Die Abdeckvorrichtung kann beispielsweise mindestens einen Griff oder mindestens einen Hebel aufweisen, welcher von dem Benutzer für den Öffnungs- oder Schließvorgang benutzt werden kann. Eine zusätzliche Taste oder ein zusätzlicher Schalter ist nicht mehr erforderlich, da die Abdeckvorrichtung selbst und deren Bewegung beispielsweise als Bedienelement genutzt werden können.
- Das Öffnen oder Schließen der Abdeckvorrichtung muss nicht notwendigerweise durch den manuellen Kraftangriff an der Abdeckvorrichtung ausgelöst werden. Zusätzlich zu dieser Option einer Auslösung der Öffnungs- oder Schließbewegung durch den manuellen Kraftangriff können auch andere Auslöser für eine Öffnungs- oder Schließbewegung vorgesehen sein. So kann die Reinigungsvorrichtung beispielsweise derart ausgestaltet sein, dass, zusätzlich zu der erfindungsgemäßen Ausgestaltung, auch eine programmgesteuerte Öffnungs- oder Schließbewegung erfolgt, bei der nicht notwendigerweise ein durch einen Benutzer gegebener Impuls die Öffnungs- oder Schließbewegung auslöst. Beispielsweise kann die Reinigungsvorrichtung, insbesondere die Steuerung, derart eingerichtet sein, dass am Ende eines Reinigungsprogramms die Abdeckvorrichtung, beispielsweise die Haube, selbsttätig geöffnet wird, beispielsweise entsprechend einer Parametrierung des Reinigungsprogramms.
- Die vorliegende Erfindung ist besonders vorteilhaft bei Haubengeschirrspülmaschinen oder Durchschubgeschirrspülmaschinen realisierbar, bei welchen eine schwere Haube zu bewegen ist. Die Haube kann beispielsweise über Ketten oder andere Zugmittel mit einem Motor angetrieben werden, beispielsweise einem Gleichstrom-Getriebemotor. Am Wellenende des Motors kann sich ein Inkrementalgeber befinden, mit welchem Überwachungsfunktionen realisiert werden. Der Getriebemotor kann derart ausgestaltet sein, dass dieser nicht selbsthemmend ist. Dadurch kann beispielsweise im Störfall die Haube auch von Hand betätigt werden. Durch diese Auslegung ist es möglich, die Haube von Hand zu bewegen, wodurch der Motor mitbewegt wird. Der Inkrementalgeber kann eine Drehbewegung des Motors und die zugehörige Arbeitsrichtung erkennen und diese Information beispielsweise mittels mindestens eines Signals an die Steuerung weitergeben. Die Steuerung kann dieses Signal auswerten, kann den Bewegungswunsch interpretieren und kann dann den Motor in die entsprechende Richtung ansteuern. Wie oben ausgeführt, kann beispielsweise durch ein Schwellwertverfahren eine Bewegung erkannt werden. Beispielsweise kann ein Haubenhub von 5 mm oder mehr erkannt werden, und es kann dann der Motor in entsprechender Richtung angesteuert werden. Es sind grundsätzlich keine separaten Tasten oder Schalter nötig, auch wenn diese gleichwohl vorhanden sein können, wodurch erhöhte Einbau- und Installationsanforderungen vermieden werden und wodurch somit eine Kostenreduktion ermöglicht werden kann. Üblicherweise sind Haubengeschirrspülmaschinen ohnehin mit einem oder mehreren Griffen an der Haube oder mit einem oder mehreren Hebeln an der Haube ausgestaltet, welche sich grundsätzlich in der Regel in günstiger Position zu einer Arbeitsposition der Bedienperson befinden und welche beispielsweise auch ohne direkten Sichtkontakt bedienbar sein können. Insgesamt ergibt sich durch die Erfindung eine bedienfreundliche und bediensichere Situation.
- Weitere Einzelheiten und Merkmale der Erfindung ergeben sich aus der nachfolgenden Beschreibung von bevorzugten Ausführungsbeispielen, insbesondere in Verbindung mit den Unteransprüchen. Hierbei können die jeweiligen Merkmale für sich alleine oder zu mehreren in Kombination miteinander verwirklicht sein. Die Erfindung ist nicht auf die Ausführungsbeispiele beschränkt. Die Ausführungsbeispiele sind in den Figuren schematisch dargestellt. Gleiche Bezugsziffern in den einzelnen Figuren bezeichnen dabei gleiche oder funktionsgleiche bzw. hinsichtlich ihrer Funktionen einander entsprechende Elemente.
- Im Einzelnen zeigen:
- Figur 1
- eine exemplarische Vorderansicht einer Durchschubgeschirrspülmaschine in Form einer Haubengeschirrspülmaschine, in denen die Erfindung umgesetzt werden kann;
- Figur 2
- eine Seitenansicht der Haubengeschirrspülmaschine gemäß
Figur 1 ; und - Figur 3
- eine schematische Ansicht einer Kraftübertragungsstrecke und von Federelementen zum Gewichtsausgleich der Haube der Haubengeschirrspülmaschine.
- In
Figur 1 ist ein Ausführungsbeispiel einer erfindungsgemäßen Reinigungsvorrichtung 110 dargestellt. Die Reinigungsvorrichtung 110 ist in diesem Ausführungsbeispiel als Durchschubgeschirrspülmaschine 112 ausgestaltet, die einen Einlauftisch oder Zulauftisch 114, eine Haubengeschirrspülmaschine 116 und einen Auslauftisch 118 umfasst. Die Reinigungsvorrichtung 110 ist inFigur 1 in Vorderansicht dargestellt. InFigur 2 ist die Haubengeschirrspülmaschine 116 nochmals in einer Seitenansicht gezeigt. - Neben der Haubengeschirrspülmaschine 116 kann die Reinigungsvorrichtung 110 im Bereich des Zulauftischs 114 exemplarisch ein Becken 120 und eine Schlauchbrause 122 für eine Vorreinigung des Reinigungsguts 124 umfassen. Das Reinigungsgut 124 kann beispielsweise mittels eines oder mehrerer Geschirrkörbe 126 in eine Reinigungskammer 128 der Reinigungsvorrichtung 110 eingebracht werden. Dort kann eine Beaufschlagung des Reinigungsguts 124 mit einer oder mehreren Reinigungsfluiden erfolgen, beispielsweise über eine oder mehrere in den
Figuren 1 und2 nicht näher dargestellte Beaufschlagungsvorrichtungen, beispielsweise Düsensysteme. - Die Haubengeschirrspülmaschine 116 weist eine Basis 130 auf, welche beispielsweise über ein Gestell 132 verfügt. Weiterhin umfasst die Haubengeschirrspülmaschine 116 eine Abdeckvorrichtung 134, welche als Haube 136 ausgestaltet ist. Diese Haube 136 kann über einen Öffnungsweg geöffnet werden und ist in den
Figuren 1 und2 jeweils mit durchgezogenen Linien in einer geschlossenen Position 135 und in gestrichelten Linien in einer geöffneten Position 137 dargestellt. Die Richtung einer Bewegung von der geschlossenen Position 135 in die geöffnete Position 137 definiert eine Öffnungsbewegungsrichtung 139, und die entgegengesetzte Richtung einer Bewegung von der geöffneten Position 137 in die geschlossene Position 135 definiert eine Schließbewegungsrichtung 141. - Die Haubengeschirrspülmaschine 116 weist weiterhin mindestens ein Betätigungselement 138 in Form eines Griffs 140 auf. In
Figur 2 ist, analog zur Darstellung der Haube 136, der Griff 140 mit durchgezogenen Linien in der geschlossenen Position 135 dargestellt, und mit gestrichelten Linien in der geöffneten Position 137. Der Griff 140 greift beispielsweise direkt an der Haube 136 an. - In der Basis 130 der Haubengeschirrspülmaschine 116 kann weiterhin mindestens eine Steuerung 148 angeordnet sein. Eine Steuerung 148 kann jedoch beispielsweise auch alternativ oder zusätzlich an anderen Orten der Haubengeschirrspülmaschine 116 angeordnet sein. Weiterhin können in der Basis 130 weitere Elemente angeordnet sein, wie beispielsweise mindestens ein Aufbereitungstank, in welchem eine Nachspülflüssigkeit temperierbar ist, beispielsweise mindestens ein Boiler. Diese Elemente sind in den Figuren nicht dargestellt.
- Die Haube 136 ist über mindestens ein Getriebe 184 mit mindestens einem elektromechanischen Antrieb 188 verbunden. Der elektromechanische Antrieb 188 ist eingerichtet, um, über das Getriebe 184, die Haube 136 in der Öffnungsbewegungsrichtung 139 oder der Schließbewegungsrichtung 141 zu bewegen, beispielsweise um die Haube 136 von der geschlossenen Position 135 in die geöffnete Position 137 zu bringen oder umgekehrt. Das Getriebe 184 kann beispielsweise, wie nachfolgend beschrieben, ein Zugmittelgetriebe 185 sein oder aufweisen, wie nachfolgend näher erläutert wird. Das Getriebe 184 umfasst beispielsweise eine Kraftübertragungsstrecke 182, ein oder mehrere Drehmomentübertragungselemente 168, einen oder mehrere Drehmomentwandler 166, eine oder mehrere Kettenräder 162,170, ein oder mehrere Zugmittel 158,172 sowie gegebenenfalls weitere Elemente. Es sei jedoch darauf hingewiesen, dass auch andere Arten von Getrieben 184 im Rahmen der vorliegenden Erfindung einsetzbar sind, beispielsweise Getriebe 184 ohne Zugmittel und/oder Getriebe 184 ohne Drehmomentwandler. Die nachfolgende Beschreibung des Getriebes 184 ist somit exemplarisch zu sehen.
- Die Reinigungsvorrichtung 110 weist auf ihrer Rückseite beidseitig Führungselemente 150 auf, wobei eines dieser Führungselemente 150 in
Figur 3 schematisch dargestellt ist. Dieses Führungselement 150 kann, wie inFigur 3 dargestellt, beispielsweise eine Führungsschiene 152 oder eine andere Art von Führungsprofil aufweisen, beispielsweise ein rechteckiges Profil in Form eines Rechteckrohrs und/oder Quadratrohrs. Dieses ist, wie inFigur 3 gezeigt, senkrecht angeordnet. Jedes Führungselement 150 wird beispielsweise über Rollen 154, beispielsweise auf jeder Seite drei Rollen, abgestützt. An den Führungselementen 150 ist oben je ein Kragarm 156 nach vorne ausgebildet, auf denen die, beispielsweise komplett vormontierte, Haube 136 aufgeschoben werden kann und beispielsweise nur mit wenigen Befestigungselementen, z.B. zwei Schrauben, gesichert werden kann. - An jedem Führungselement 150 ist unten ein erstes Zugmittel 158 befestigt, beispielsweise mindestens eine erste Rollenkette. Dieses erste Zugmittel 158 wird jeweils über ein Umlenkrad 160 im oberen Bereich eines Gehäuses der Reinigungsvorrichtung 110 geführt. Das erste Zugmittel 158 ist weiter auf jeweils einem ersten Kettenrad 162 im unteren Bereich des Gehäuses aufgelegt. Die dargestellte Anordnung des Führungselements 150, des ersten Zugmittels 158, des Umlenkrads 160 und des ersten Kettenrads 162 ist dupliziert auf der gegenüberliegenden Seite der Rückseite der Reinigungsvorrichtung 110 angeordnet, so dass zwei, beispielsweise gleichartige, erste Kettenräder 162 existieren, von denen in
Figur 3 zur Vereinfachung der Darstellung lediglich eines dargestellt ist. Die beiden ersten Kettenräder 162 sind über eine Welle 164, auf welche diese drehfest aufgebracht sind, drehstarr miteinander verbunden. Zudem ist auf dieser Welle 164, ebenfalls drehstarr, ein Drehmomentwandler 166 aufgebracht. Dieser umfasst ein drehbar gelagertes Drehmomentübertragungselement 168, welches in diesem Ausführungsbeispiel als drittes Kettenrad 170 ausgebildet ist. Dieses dritte Kettenrad 170 ist um die Achse der Welle 164 drehbar gelagert. Weiterhin ist auf diesem dritten Kettenrad 170 ein drittes Zugmittel 172 aufgelegt, welches sich an einem Angriffspunkt 174 von dem dritten Kettenrad 170 abhebt und an seinem anderen Ende mit, in diesem Ausführungsbeispiel exemplarisch, zwei Federelementen 176 verbunden ist. Die Haube 136 ist inFigur 3 in geschlossener Position 135 dargestellt. Bei einer Bewegung entlang eines Öffnungsweges fährt das Führungselement 150 nach oben, und die ersten Kettenräder 162 drehen sich in einer Drehrichtung 178. Das dritte Kettenrad 170 dreht sich bei dieser Öffnungsbewegung in einer zur Drehrichtung 178 beispielsweise gleichen Drehrichtung 180. - Das Drehmomentübertragungselement 168 in Form des dritten Kettenrades 170 ist dabei beispielsweise mit einem ungleichmäßigen Radius ausgelegt, wie in
Figur 3 erkennbar. Dies bedeutet, dass sich ein Abstand R zwischen dem Angriffspunkt 174 und der Achse mit einer Winkelstellung des Drehmomentübertragungselements 168 ändert. Damit ändert sich jedoch auch das von dem dritten Zugmittel 172 auf die Welle 164 übertragene Drehmoment, da dieses von der Winkelstellung des Kettenrades 170 abhängig ist. - Wenn die Haube 136 geschlossen ist, sind die beiden Ketten der ersten Zugmittel 158, die unten an den Führungsschienen 152 befestigt sind, weitgehend von den Kettenrädern 162 abgewickelt. Das dritte Zugmittel 172 hingegen, ebenfalls in Form beispielsweise einer Rollenkette ausgebildet, ist weitgehend auf seinem dritten Kettenrad 170 aufgewickelt, und die Federelemente 176, welche beispielsweise als Zugfedern ausgebildet sind, sind, wie in
Figur 3 gezeigt, gespannt. Beim Anheben der Haube 136 wickeln sich die beiden ersten Zugmittel 158 auf ihre Räder 162 auf. Gleichzeitig wird das dritte Zugmittel 172 abgewickelt, und die Federelemente 176 entspannen sich. - Um die Veränderung der Federkraft der Federelemente 176 über den Öffnungsweg hinweg auszugleichen, hat das dritte Kettenrad 170, wie oben ausgeführt, einen Wirkradius und/oder Teilkreis, welcher sich über den Umfang hinweg verändert. Durch diese Ausführung lässt sich die Veränderung der Federkraft über den Öffnungsweg bzw. über die Dehnung hinweg an die wirklich erforderliche Kraft zum Ausgleich des Gewichts der Haube 136 anpassen. Außer einer gleichmäßigen und/oder kontinuierlichen Radiusverkleinerung oder Radiusvergrößerung lassen sich auch ungleichförmige Anpassungen des Wirkradius R realisieren. So lassen sich beispielsweise zur Dämpfung einer Bewegung an den Endlagen auch an den Kettenrädern sprungartige Durchmesserveränderungen einarbeiten.
- Die Zugmittel 158 und der Drehmomentwandler 166 sind Bestandteil einer Kraftübertragungsstrecke 182, mittels derer eine Federkraft des mindestens einen Federelements 176 auf die Abdeckvorrichtung 134 übertragbar ist, in gewandelter Form. Die Kraftübertragungsstrecke 182 ist in diesem Ausführungsbeispiel Bestandteil des Getriebes 184. Weitere Bestandteile der Kraftübertragungsstrecke können die Umlenkräder 160 sowie die ersten Kettenräder 162 und die Welle 164 sein. Aufgrund des über die Winkelstellung veränderlichen Wirkradius R weist der Drehmomentwandler 166 und damit die gesamte Kraftübertragungsstrecke 182 ein über den Öffnungsweg hinweg veränderliches Übersetzungsverhältnis auf. Der Drehmomentwandler 166 ist somit beispielsweise Bestandteil des Getriebes 184, welches in diesem Ausführungsbeispiel ein variables Übersetzungsverhältnis aufweist, das über den Öffnungsweg der Haube 136 variiert. Es sei jedoch darauf hingewiesen, dass auch Ausführungsformen der vorliegenden Erfindung möglich sind, bei welchen kein Getriebe 184 mit einem variablen Übersetzungsverhältnis verwendet wird, sondern ein Getriebe mit einem festen Übersetzungsverhältnis.
- Die Kettenräder 162, 170 können beispielsweise einzeln aus Metall gefertigt und zusammengesetzt sein. Weiterhin können einzelne Teile des Rädersatzes, wie beispielsweise Führungsscheiben, auch ganz oder teilweise aus Kunststoff gefertigt sein. Auch eine Fertigung des gesamten Rädersatzes aus Kunststoff ist denkbar. Der Rädersatz ist vorzugsweise mit Wälzlagern gelagert, was eine geringere Reibung und dadurch einen leichten Lauf ermöglicht. Die Kettenräder 162 und die Welle 164 sowie auch die Zugmittel 158, 172 können weitere Bestandteile des Getriebes 184 sein.
- Wie oben bereits ausgeführt, ist zur Realisierung einer halbautomatischen und/oder vollautomatischen Haube 136 an dem Getriebe 184 mindestens ein elektromechanischer Antrieb 186 angekoppelt, beispielsweise mindestens ein Motor und besonders bevorzugt mindestens ein Elektromotor. Insbesondere kann es sich hierbei um einen Gleichstrom-Getriebemotor handeln. Der elektromechanische Antrieb 186 kann beispielsweise mittels einer weiteren Kette 188 und/oder einer anderen Art von Zugmittel sowie mittels zweier Ritzel 190, welche gleichartig oder auch verschiedenartig sein können, und/oder mittels eines weiteren Getriebes mit festem oder variablem Übersetzungsverhältnis angekoppelt sein.
- Um das Bedienpersonal vor allzu großen Schließkräften der halbautomatischen oder vollautomatischen Haube zu schützen, sind bei einer optionalen halbautomatischen oder auch vollautomatischen Haube mehrere Lösungen anwendbar. So kann der Elektromotor beispielsweise so befestigt werden, dass sein Drehmoment über eine federunterstützte Drehmomentstütze 192 abgefangen wird. Bei einem zu großen Drehmoment, beispielsweise einer zu großen Schließkraft an der Haube 136, wird diese Drehmomentstütze 192 ausgelenkt. Diese Bewegung kann beispielsweise mittels eines Schalters 194 erkannt werden, der sein Signal an die Steuerung 148 weitergeben kann. Die Steuerung 148 kann dann beispielsweise die Bewegung der Haube 136 beenden und optional eine umgekehrte Bewegung einleiten.
- Alternativ oder zusätzlich kann in der Kraftübertragungsstrecke 182, einschließlich des elektromechanischen Antriebs 186, mindestens ein Drehgeber integriert sein, welcher ebenfalls mit der Steuerung 148 verbunden sein kann. Dieser Drehgeber ist in
Figur 3 nicht dargestellt. Die Steuerung 148 kann beispielsweise erkennen, wenn die Signale des Drehgebers ausbleiben, beispielsweise weil eine Bewegung behindert ist. In diesem Fall kann die Steuerung 148 dann beispielsweise die Bewegung der Haube beenden und/oder eine umgekehrte Bewegung einleiten. Zur Begrenzung einer eventuell auftretenden Quetschkraft kann die Gewichtsausgleichskraft für die Haube 136 so auf die Schließkraft durch den Antrieb abgestimmt werden, dass ungefährliche Werte nicht überschritten werden. - Um die Sicherheit des Bedienpersonals im Falle des Versagens einzelner Bauteile des Gewichtsausgleichs zu erhöhen, können beispielsweise mehrere Elemente der Kraftübertragungsstrecke 182 redundant ausgelegt sein. So können beispielsweise anstelle eines einzelnen dritten Zugmittels 172, beispielsweise einer einzelnen dritten Kette, zwei Ketten parallel oder "Rücken an Rücken" eingesetzt werden. Weiterhin kann, alternativ oder zusätzlich, das dritte Zugmittel 172 um ein weiteres verformbares Bauteil und/oder Zugmittel ergänzt werden, beispielsweise ein Seil, welches im Fall eines Bruchs der Kette die Zugkraft aufnehmen kann.
- Weitere mögliche Ausgestaltungen betreffen Sicherungselemente, welche eine Sicherung bei einem Bruch des mindestens einen Federelements 176 bieten. So kann das Federelement 176 beispielsweise mindestens ein Sicherungselement 196 aufweisen, welches beispielsweise unmittelbar Bestandteil der Federelemente 176 sein kann oder auch, was ebenfalls umfasst sein soll, mit diesen gekoppelt sein kann. Beispielsweise kann dieses Sicherungselement 196 ein Fangelement oder eine Fangeinrichtung umfassen, welche in diesem Ausführungsbeispiel exemplarisch mit den beiden Federelementen 176 gekoppelt sind. Beispielsweise kann dieses Sicherungselement mindestens eine Sicherungsstange 198 aufweisen, wobei die Kraftübertragungsstrecke 182 bei einem Bruch des mindestens einen Federelements 176 oder, im Falle mehrerer Federelemente 176, an die Sicherungsstange 198 ankoppeln kann. Auch andere Ausgestaltungen sind jedoch möglich.
- Wie oben ausgeführt, können insbesondere zwei erste Zugmittel 158 vorgesehen sein. Auch eine andere Anzahl ist jedoch möglich. Weiterhin können zwei oder mehr der genannten Elemente auch ganz oder teilweise zusammengefasst sein. So können beispielsweise die beiden ersten Zugmittel 158 auch kürzer ausgeführt sein und beispielsweise mit einer einzelnen Kette verbunden sein, die dann einzeln über den Rädersatz mit den Gewichtsausgleichs-Federelementen 176 verbunden sein kann.
- Anstelle der genannten Rollenketten kann die Erfindung auch mit anderen flexiblen oder verformbaren Zugmitteln oder auch in Kombination mit verschiedenen Arten von Zugmitteln verwirklicht sein. Beispielsweise können Bolzenketten, Gliederketten, Riemen oder Seile eingesetzt werden.
- Zur Betätigung einer Haubenbewegung kann ein Benutzer, insbesondere Bedienpersonal, beispielsweise ein oder mehrere Bedienelemente 200 betätigen, welche beispielsweise seitlich oder an einer Vorderseite der Basis 130 und/oder der Haube 136 angeordnet sein können. Diese können beispielsweise auf die Steuerung 148 einwirken, welche wiederum den elektromechanischen Antrieb 186 ansteuert. Wie oben ausgeführt, sind jedoch grundsätzlich die Anordnung und der elektrische Anschluss des mindestens einen Bedienelements 200 grundsätzlich problematisch. Insbesondere bei der in
Figur 1 dargestellten Anordnung kann es sein, dass das Bedienpersonal den Arbeitsplatz am Becken 120 verlassen muss, um eine Bewegung der Haube 136 zu initiieren. - Wie oben ausgeführt, ist zur Lösung dieser Problematik im Rahmen der vorliegenden Erfindung mindestens ein Sensor 202 vorgesehen, welcher eingerichtet ist, um einen manuellen Kraftangriff an die Abdeckvorrichtung 134 zu erkennen und vorzugsweise auch die Richtung dieses Kraftangriffs. Auf diese Weise kann beispielsweise die Haube 136 durch einen Benutzer, wenn sich diese in der geschlossenen Position 135 befindet, leicht angehoben werden, also in die Öffnungsbewegungsrichtung 139 bewegt werden, was durch den Sensor 202 erkannt wird. Beispielsweise können Bewegungen von 5 mm oder mehr oder Bewegungen größer als 5 mm erkannt werden als ein Wunsch, die Haube 136 in diese Richtung zu bewegen. Umgekehrt kann beispielsweise die Haube 136 durch einen Benutzer, wenn sich diese in der geöffneten Position 137 befindet, leicht nach unten, in Schließbewegungsrichtung 141, gezogen werden, was durch den Sensor 202 erkannt wird. Die Erkennung dieses Kraftangriffs sowie gegebenenfalls der Richtung dieses Kraftangriffs kann dann von der Steuerung 148 in einen entsprechenden Steuerbefehl für den elektromechanischen Antrieb 186 umgewandelt werden, um die Bewegung der Haube 136 in der gewünschten Richtung anschließend durch den elektromechanischen Antrieb 186 zu unterstützen oder sogar ausschließlich durch den elektromechanischen Antrieb 186 durchzuführen. Die Haube 136 selbst kann also als eine Art Bedienelement 200 genutzt werden, indem durch einen Kraftangriff an dieser Haube 136 ein Wunsch hinsichtlich einer Bewegung der Haube 136 an die Steuerung 148 übermittelt wird.
- Der Sensor 202 kann grundsätzlich an verschiedenen Stellen innerhalb der Reinigungsvorrichtung 110 angeordnet sein. So kann der mindestens eine Sensor 202 beispielsweise an einem oder mehreren der folgenden Orte angeordnet sein: an der Haube 136; an dem Führungselement 150; an der Führungsschiene 152; innerhalb des Getriebes 184, beispielsweise innerhalb der Kraftübertragungsstrecke 182 und/oder an anderer Stelle innerhalb des Getriebes 184; in dem elektromechanischen Antrieb 186. In dem dargestellten Ausführungsbeispiel können der elektromechanische Antrieb 186 und/oder das Getriebe 184 beispielsweise mindestens eine angetriebene Welle 204 umfassen, welche von dem elektromechanischen Antrieb 186 vorzugsweise drehbar ist, vorzugsweise in beide möglichen Drehrichtungen. Der Sensor 202 kann beispielsweise einen Inkrementalgeber 206 umfassen, welcher beispielsweise an einem Wellenende der Welle 204 angeordnet sein kann.
- Der Sensor 202 kann beispielsweise drahtlos oder auch drahtgebunden mit der Steuerung 148 verbunden sein, um mit dieser unidirektional oder auch bidirektional zu kommunizieren. Die Steuerung 148 kann beispielsweise eingerichtet sein, um die Informationen des Sensors 202 auszuwerten und entsprechende Steuerbefehle an den elektromechanischen Antrieb 186 zu geben. Der elektromechanische Antrieb 186 kann direkt oder indirekt, beispielsweise drahtlos oder drahtgebunden, mit der Steuerung 148 verbunden sein. So kann die Steuerung 148 zum Beispiel eingerichtet sein, um den elektromechanischen Antrieb 186 zu starten, eine Drehrichtung desselben zu beeinflussen oder auch eine Drehgeschwindigkeit. Auch andere Ausgestaltungen sind möglich. Die Steuerung 148 kann beispielsweise eingerichtet sein, um Signale und/oder Informationen des Sensors 202 programmtechnisch auszuwerten, beispielsweise indem ein Schwellwertverfahren verwendet wird. So kann beispielsweise eine Veränderung der von dem Sensor 202 übermittelten Stellung und/oder eines Inkrements überwacht werden und beispielsweise mit einem oder mehreren Schwellwerten verglichen werden. Auf diese Weise kann beispielsweise die oben beschriebene Überwachung erfolgen, dahingehend, ob die Haube 136 durch den manuellen Kraftangriff um mehr als eine vorgegebene Wegstrecke bewegt wurde, was dann als Befehl für eine weitere Bewegung in der Richtung dieses Kraftangriffs interpretiert werden kann.
- Der elektromechanische Antrieb 186 kann insbesondere als Gleichstrom-Getriebemotor ausgestaltet sein. Der Gleichstrom-Getriebemotor kann beispielsweise so ausgelegt sein, dass dieser nicht selbsthemmend ist. Dadurch kann eine Bewegung von Hand erfolgen und/oder es kann auch in einem Störfall die Haube 136 auch von Hand betätigt werden. Der Motor kann dabei mitbewegt werden. Der Inkrementalgeber 206 kann beispielsweise eine Drehbewegung des Motors erkennen sowie die zugehörige Arbeitsrichtung und diese Signale an die Steuerung 148 weitergeben. Die Steuerung 148 kann beispielsweise dieses Signal auswerten, den Bewegungswunsch interpretieren und dann den Motor in die entsprechende Richtung ansteuern.
- Weiterhin kann die Reinigungsvorrichtung 110 auch zusätzliche Funktionen aufweisen. So kann diese insbesondere zur Durchführung mindestens eines Reinigungsprogramms eingerichtet sein, beispielsweise durch eine entsprechende programmtechnische Einrichtung der Steuerung 148. Beispielsweise kann, nach einer Schließbewegung, wenn sich die Haube 136 in der geschlossenen Position 135 befindet, automatisch ein Spülprogramm gestartet werden.
- Wie oben ausgeführt, sind bei der erfindungsgemäßen Ausgestaltung insbesondere keine separaten Tasten und/oder Schalter nötig, um eine Bewegung der Haube 136 zu initiieren. Hierdurch entfallen die entsprechenden Installationsanforderungen, und es lassen sich im Vergleich zu herkömmlichen Reinigungsvorrichtungen 110 auch Kosten deutlich reduzieren. Der Griff 140 befindet sich üblicherweise in einer ergonomisch günstigen Position an der Haube 136, beispielsweise in einer ergonomisch günstigen Stellung zu einem Arbeitsplatz an dem Becken 120. Bedienpersonal an diesem Arbeitsplatz kann somit den Griff 140 leicht erreichen und damit die Haubenbewegung initiieren, auch ohne Sichtkontakt zu der Steuerung 148 und/oder zu entsprechenden Bedienelementen 200. Zudem ist ein Einlernen in der Regel nicht erforderlich, da die Haubenbewegung intuitiv initiiert wird, mit einer entsprechenden Bewegung des Griffs 140. Es ergibt sich somit eine bedienerfreundliche und bedienungssichere Gesamtsituation der Reinigungsvorrichtung 110.
-
- 110
- Reinigungsvorrichtung
- 112
- Durchschubgeschirrspülmaschine
- 114
- Zulauftisch
- 116
- Haubengeschirrspülmaschine
- 118
- Auslauftisch
- 120
- Becken
- 122
- Schlauchbrause
- 124
- Reinigungsgut
- 126
- Geschirrkorb
- 128
- Reinigungskammer
- 130
- Basis
- 132
- Gestell
- 134
- Abdeckvorrichtung
- 135
- geschlossene Position
- 136
- Haube
- 137
- geöffnete Position
- 138
- Betätigungselement
- 139
- Öffnungsbewegungsrichtung
- 140
- Griff
- 141
- Schließbewegungsrichtung
- 146
- Seitenwand
- 148
- Steuerung
- 150
- Führungselement
- 152
- Führungsschiene
- 154
- Rolle
- 156
- Kragarm
- 158
- erstes Zugmittel
- 160
- Umlenkrad
- 162
- erstes Kettenrad
- 164
- Welle
- 166
- Drehmomentwandler
- 168
- Drehmomentübertragungselement
- 170
- drittes Kettenrad
- 172
- drittes Zugmittel
- 174
- Angriffspunkt
- 176
- Federelement
- 178
- erste Drehrichtung
- 180
- zweite Drehrichtung
- 182
- Kraftübertragungsstrecke
- 184
- Getriebe
- 185
- Zugmittelgetriebe
- 186
- elektromechanischer Antrieb
- 188
- Kette
- 190
- Ritzel
- 192
- Drehmomentstütze
- 194
- Schalter
- 196
- Sicherungselement
- 198
- Sicherungsstange
- 200
- Bedienelement
- 202
- Sensor
- 204
- Welle
- 206
- Inkrementalgeber
Claims (11)
- Reinigungsvorrichtung (110) zum Reinigen von Reinigungsgut (124), wobei die Reinigungsvorrichtung (110) eine Geschirrspülmaschine ist, wobei die Reinigungsvorrichtung (110) mindestens eine Reinigungskammer (128) und mindestens eine Abdeckvorrichtung (134) umfasst, wobei die Abdeckvorrichtung (134) über mindestens ein Getriebe (184) mittels mindestens eines elektromechanischen Antriebs (186) in einer Öffnungsbewegungsrichtung (139) von einer geschlossenen Position (135) in eine geöffnete Position (137) oder in einer Schließbewegungsrichtung (141) von einer geöffneten Position (137) in eine geschlossene Position (135) bewegbar ist, wobei die Reinigungsvorrichtung (110) weiterhin einen Sensor (202) aufweist, wobei der Sensor (202) eingerichtet ist, um einen manuellen Kraftangriff an der Abdeckvorrichtung (134) in der Öffnungsbewegungsrichtung (139) oder in der Schließbewegungsrichtung (141) zu erkennen und wobei die Reinigungsvorrichtung (110) weiterhin eingerichtet ist, um entsprechend der Erkennung des manuellen Kraftangriffs den elektromechanischen Antrieb (186) anzusteuern,
dadurch gekennzeichnet, dass
die Geschirrspülmaschine ausgewählt ist aus einer Haubengeschirrspülmaschine (116) und einer Durchschubgeschirrspülmaschine (112), wobei die Abdeckvorrichtung (134) die Reinigungskammer (128) zumindest teilweise umschließt und eine in einer vertikalen Richtung verschiebbar gelagerte Haube (136) umfasst, welche nach oben hin verschiebbar ist, um die Reinigungskammer (128) zu öffnen, und welche nach unten hin verschiebbar ist, um gemeinsam mit einer Basis (130) der Reinigungsvorrichtung (110) die Reinigungskammer (128) abzuschließen, wobei die Reinigungsvorrichtung (110) in mindestens einer der folgenden Weisen eingerichtet ist:die Reinigungsvorrichtung (110) ist eingerichtet, um einen manuellen Kraftangriff in der Öffnungsbewegungsrichtung (139) zu erkennen und den elektromechanischen Antrieb (186) derart anzusteuern, dass die Abdeckvorrichtung (134) in der Öffnungsbewegungsrichtung (139) bewegt wird, wobei die Reinigungsvorrichtung (110) eingerichtet ist, um mittels des Sensors (202) zu erkennen, wenn bei der Haube (136) in geschlossener Position (135) ein Benutzer manuell die Haube (136) beginnt zu öffnen, und um den elektromechanischen Antrieb (186) derart anzusteuern, dass diese Öffnungsbewegung ausschließlich durch den elektromechanischen Antrieb (186) fortgesetzt wird, bis die geöffnete Position (137) erreicht ist;die Reinigungsvorrichtung (110) ist eingerichtet, um einen manuellen Kraftangriff in der Schließbewegungsrichtung (141) zu erkennen und den elektromechanischen Antrieb (186) derart anzusteuern, dass die Abdeckvorrichtung (134) in der Schließbewegungsrichtung (141) bewegt wird, wobei die Reinigungsvorrichtung (110) weiterhin eingerichtet ist, um mittels des Sensors (202) zu erkennen, wenn bei der Haube (136) in geöffneter Position (137) der Benutzer manuell die Haube (136) beginnt zu schließen, und um den elektromechanischen Antrieb (186) derart anzusteuern, dass diese Schließbewegung ausschließlich durch den elektromechanischen Antrieb (186) fortgesetzt wird, bis die Haube (136) die geschlossene Position (135) erreicht hat. - Reinigungsvorrichtung (110) nach dem vorhergehenden Anspruch, wobei die Abdeckvorrichtung (134) eine linear bewegliche Abdeckvorrichtung (134) ist.
- Reinigungsvorrichtung (110) nach einem der vorhergehenden Ansprüche, wobei die Reinigungsvorrichtung (110) eine Steuerung (148) aufweist, wobei die Steuerung (148) eingerichtet ist, um den elektromechanischen Antrieb (186) anzusteuern.
- Reinigungsvorrichtung (110) nach einem der vorhergehenden Ansprüche, wobei der Sensor (202) eingerichtet ist, um eine Richtung des manuellen Kraftangriffs zu erkennen.
- Reinigungsvorrichtung (110) nach einem der vorhergehenden Ansprüche, wobei der Sensor (202) mindestens einen mit dem elektromechanischen Antrieb (186) verbundenen Inkrementalgeber (206) aufweist.
- Reinigungsvorrichtung (110) nach einem der vorhergehenden Ansprüche, wobei der Sensor (202) eingerichtet ist, um den manuellen Kraftangriff an der Abdeckvorrichtung (134) aufgrund einer Bewegung zu erfassen.
- Reinigungsvorrichtung (110) nach dem vorhergehenden Anspruch, wobei die Reinigungsvorrichtung (110) eingerichtet ist, um die Bewegung mit mindestens einem Schwellwert zu vergleichen, um den manuellen Kraftangriff an der Abdeckvorrichtung (134) zu erkennen.
- Reinigungsvorrichtung (110) nach einem der vorhergehenden Ansprüche, wobei der elektromechanische Antrieb (186) einen Motor umfasst, wobei der Motor ein nicht-selbsthemmender Motor ist.
- Reinigungsvorrichtung (110) nach dem vorhergehenden Anspruch, wobei die Reinigungsvorrichtung (110) derart eingerichtet ist, dass durch den manuellen Kraftangriff an der Abdeckvorrichtung (134) der Motor mitbewegt wird, wobei der Sensor (202) eingerichtet ist, um eine Bewegung des Motors zu erkennen.
- Reinigungsvorrichtung (110) nach einem der vorhergehenden Ansprüche, wobei die Reinigungsvorrichtung (110) weiterhin eingerichtet ist, um nach Durchführung einer Schließbewegung, nachdem die Abdeckvorrichtung (134) die geschlossene Position erreicht hat, mindestens ein Reinigungsprogramm zu starten.
- Verfahren zum Reinigen von Reinigungsgut (124), umfassend ein Reinigen des Reinigungsguts (124) in mindestens eine Reinigungskammer (128) einer Reinigungsvorrichtung (110), wobei die Reinigungsvorrichtung (110) eine Geschirrspülmaschine ist, wobei mindestens eine Abdeckvorrichtung (134) verwendet wird, wobei die Abdeckvorrichtung (134) über mindestens ein Getriebe (184) mittels mindestens eines elektromechanischen Antriebs (186) in einer Öffnungsbewegungsrichtung (139) von einer geschlossenen Position in eine geöffnete Position oder in einer Schließbewegungsrichtung (141) von einer geöffneten Position in eine geschlossene Position bewegbar ist, wobei das Verfahren weiterhin eine Erkennung eines manuellen Kraftangriffs an der Abdeckvorrichtung (134) in der Öffnungsbewegungsrichtung (139) oder in der Schließbewegungsrichtung (141) mittels mindestens eines Sensors (202) umfasst und wobei das Verfahren weiterhin eine Ansteuerung des elektromechanischen Antriebs (186) entsprechend der Erkennung des manuellen Kraftangriffs umfasst,
dadurch gekennzeichnet, dass
die Geschirrspülmaschine ausgewählt ist aus einer Haubengeschirrspülmaschine (116) und einer Durchschubgeschirrspülmaschine (112), wobei die Abdeckvorrichtung (134) die Reinigungskammer (128) zumindest teilweise umschließt und eine in einer vertikalen Richtung verschiebbar gelagerte Haube (136) umfasst, welche nach oben hin verschiebbar ist, um die Reinigungskammer (128) zu öffnen, und welche nach unten hin verschiebbar ist, um gemeinsam mit einer Basis (130) der Reinigungsvorrichtung (110) die Reinigungskammer (128) abzuschließen, wobei die Ansteuerung des elektromechanischen Antriebs (186) mindestens einen der folgenden Schritte umfasst:bei einer Erkennung eines manuellen Kraftangriffs in der Öffnungsbewegungsrichtung (139) eine Ansteuerung des elektromechanischen Antriebs (186) derart, dass die Abdeckvorrichtung (134) in der Öffnungsbewegungsrichtung (139) bewegt wird, wobei die Reinigungsvorrichtung (110) eingerichtet ist, um mittels des Sensors (202) zu erkennen, wenn bei der Haube (136) in geschlossener Position (135) ein Benutzer manuell die Haube (136) beginnt zu öffnen, und um den elektromechanischen Antrieb (186) derart anzusteuern, dass diese Öffnungsbewegung ausschließlich durch den elektromechanischen Antrieb (186) fortgesetzt wird, bis die geöffnete Position (137) erreicht ist;bei einer Erkennung eines manuellen Kraftangriffs in der Schließbewegungsrichtung (141) eine Ansteuerung des elektromechanischen Antriebs (186) derart, dass die Abdeckvorrichtung (134) in der Schließbewegungsrichtung (141) bewegt wird, wobei die Reinigungsvorrichtung (110) weiterhin eingerichtet ist, um mittels des Sensors (202) zu erkennen, wenn bei der Haube (136) in geöffneter Position (137) der Benutzer manuell die Haube (136) beginnt zu schließen, und um den elektromechanischen Antrieb (186) derart anzusteuern, dass diese Schließbewegung ausschließlich durch den elektromechanischen Antrieb (186) fortgesetzt wird, bis die Haube (136) die geschlossene Position (135) erreicht hat.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL17714452.4T PL3324811T5 (pl) | 2016-03-31 | 2017-03-30 | Urządzenie oczyszczające i sposób oczyszczania artykułów do oczyszczania |
| PL20173746T PL3753468T3 (pl) | 2016-03-31 | 2017-03-30 | Urządzenie oczyszczające i sposób oczyszczania artykułów do oczyszczania |
| EP20173746.7A EP3753468B1 (de) | 2016-03-31 | 2017-03-30 | Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016205367.1A DE102016205367A1 (de) | 2016-03-31 | 2016-03-31 | Reinigungsvorrichtung und Verfahren zum Reinigen von Reinigungsgut |
| PCT/EP2017/057540 WO2017167874A1 (de) | 2016-03-31 | 2017-03-30 | Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20173746.7A Division EP3753468B1 (de) | 2016-03-31 | 2017-03-30 | Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut |
| EP20173746.7A Division-Into EP3753468B1 (de) | 2016-03-31 | 2017-03-30 | Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP3324811A1 EP3324811A1 (de) | 2018-05-30 |
| EP3324811B1 EP3324811B1 (de) | 2020-05-27 |
| EP3324811B2 true EP3324811B2 (de) | 2025-06-25 |
Family
ID=58455056
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20173746.7A Active EP3753468B1 (de) | 2016-03-31 | 2017-03-30 | Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut |
| EP17714452.4A Active EP3324811B2 (de) | 2016-03-31 | 2017-03-30 | Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20173746.7A Active EP3753468B1 (de) | 2016-03-31 | 2017-03-30 | Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US10617277B2 (de) |
| EP (2) | EP3753468B1 (de) |
| CN (1) | CN107635449B (de) |
| DE (1) | DE102016205367A1 (de) |
| ES (2) | ES2812832T5 (de) |
| PL (2) | PL3324811T5 (de) |
| WO (1) | WO2017167874A1 (de) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016205367A1 (de) | 2016-03-31 | 2017-10-05 | Meiko Maschinenbau Gmbh & Co. Kg | Reinigungsvorrichtung und Verfahren zum Reinigen von Reinigungsgut |
| USD884996S1 (en) * | 2017-03-09 | 2020-05-19 | Meiko Maschinenbau Gmbh & Co. Kg | Rinsing machine |
| DE102018217052A1 (de) * | 2018-10-05 | 2020-04-09 | Meiko Maschinenbau Gmbh & Co. Kg | Reinigungsvorrichtung und Verfahren zur Reinigung von Reinigungsgut |
| DE102019202139A1 (de) * | 2019-02-18 | 2020-08-20 | Meiko Maschinenbau Gmbh & Co. Kg | Spülkorb zur Reinigung von Hohlräumen in Reinigungsgut |
| CN110123235B (zh) * | 2019-05-21 | 2024-11-12 | 广东万和电气有限公司 | 嵌入式洗碗机及其开关门机构 |
| DE102019114740A1 (de) * | 2019-06-03 | 2020-12-03 | Miele & Cie. Kg | Wasserführendes Haushaltsgerät und Verfahren zum Betreiben des wasserführenden Haushaltsgeräts |
| DE102019210272A1 (de) * | 2019-07-11 | 2021-01-14 | Meiko Maschinenbau Gmbh & Co. Kg | Reinigungsvorrichtung mit Korbrückführung |
| DE102020104523A1 (de) | 2020-02-20 | 2021-08-26 | Illinois Tool Works Inc. | Spülmaschine |
| DE102020207064A1 (de) * | 2020-06-05 | 2021-12-09 | BSH Hausgeräte GmbH | Richtungsabhängige Aktivierung der Türbetätigung einer Haushaltsgeschirrspülmaschine |
| KR102360813B1 (ko) * | 2021-06-18 | 2022-02-09 | 김현태 | 진공 청소기의 먼지떨이 장치 |
| DE102021125824A1 (de) * | 2021-10-05 | 2023-04-06 | Ampack Gmbh | Abdeckvorrichtung für eine Abfüllstation und Abfüllstation mit einer solchen Abdeckvorrichtung |
| EP4537730B1 (de) * | 2023-10-12 | 2026-02-04 | Illinois Tool Works Inc. | Geschirrspülmaschine |
Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3589787A (en) † | 1969-11-12 | 1971-06-29 | Alco Standard Corp | Dishwasher door operator |
| US4073555A (en) † | 1975-12-22 | 1978-02-14 | Noren Tore H | Dishwasher with downwardly movable door counterbalanced by spring-biased toggle joints |
| EP0541974A1 (de) † | 1991-11-12 | 1993-05-19 | Miele & Cie. GmbH & Co. | Haushaltgerät, insbesondere Geschirrspülmaschine oder Herd mit einem durch eine Gerätetür verschliessbaren Spül- oder Backraum |
| DE19514303A1 (de) † | 1995-04-25 | 1996-10-31 | Miele & Cie | Spülautomat insbesondere für den Labor- und Krankenhausbereich, mit einem durch eine Hubtür verschließbaren Spülraum |
| DE10054392A1 (de) † | 2000-11-02 | 2002-05-08 | Winterhalter Gastronom Gmbh | Antriebsvorrichtung |
| DE102006061083A1 (de) † | 2006-12-22 | 2008-06-26 | BSH Bosch und Siemens Hausgeräte GmbH | Kältegerät mit Türöffnungshilfe |
| DE102008021496A1 (de) † | 2008-04-29 | 2009-11-05 | Miele & Cie. Kg | Haushaltsgerät |
| DE102008028313A1 (de) † | 2008-06-13 | 2009-12-17 | BSH Bosch und Siemens Hausgeräte GmbH | Kapazitiver Berührungsschalter für ein Haushaltsgerät |
| DE102010037397A1 (de) † | 2010-09-08 | 2012-03-08 | Miele & Cie. Kg | Haushaltgerät, insbesondere grifflose Geschirrspülmaschine |
| DE102011004019A1 (de) † | 2011-02-14 | 2012-08-16 | Siemens Aktiengesellschaft | Elektrisch angetriebene Tür |
| DE102012223219A1 (de) † | 2012-12-14 | 2014-06-18 | BSH Bosch und Siemens Hausgeräte GmbH | Haushaltsgerät |
| DE102013224148A1 (de) † | 2013-11-26 | 2015-05-28 | Siemens Aktiengesellschaft | Verfahren zur Steuerung eines elektrischen Antriebs einer Tür oder eines Türflügels sowie Türsteuereinrichtung |
| DE102014111718B3 (de) † | 2014-08-18 | 2015-12-03 | Miele & Cie. Kg | Spülautomat, insbesondere Desinfektionsautomat oder Endoskopspüler |
| DE102014107544A1 (de) † | 2014-05-28 | 2015-12-03 | Miele & Cie. Kg | Backofen |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3144280A1 (de) | 1981-11-07 | 1983-05-19 | Robert Bosch Gmbh, 7000 Stuttgart | Elektro-mechanischer stellantrieb |
| CN2164255Y (zh) * | 1993-05-25 | 1994-05-11 | 杨水川 | 热循环式洗碗机 |
| EP1125885B1 (de) | 2000-01-18 | 2006-03-01 | Helmut Meyerdierks | Winsch |
| US6719356B2 (en) | 2001-04-26 | 2004-04-13 | Litens Automotive | Powered opening mechanism and control system |
| WO2003062575A1 (en) | 2002-01-24 | 2003-07-31 | Intier Automotive Closures Inc. | Power lift gate actuator |
| JP2005124800A (ja) * | 2003-10-23 | 2005-05-19 | Toshiba Corp | 電気機器の電動扉及び食器洗浄機 |
| CA2514670A1 (en) | 2004-08-06 | 2006-02-06 | Magna Closures Inc. | Electromechanical strut |
| DE102005030052B4 (de) | 2005-06-27 | 2012-03-08 | Stabilus Gmbh | Antriebseinrichtung |
| AU2007260348B2 (en) | 2006-06-13 | 2011-06-02 | Linak A/S | Actuator |
| DE102007003451B4 (de) | 2007-01-17 | 2009-01-08 | Stiefel Gmbh | Schrank mit einem oder mehreren Auszügen |
| DE202007006818U1 (de) | 2007-01-17 | 2007-10-18 | Stiefel Gmbh | Schrank mit einem oder mehreren Auszügen |
| DE102008009898B4 (de) | 2007-11-13 | 2010-07-15 | Stabilus Gmbh | Klappenöffnungs- und -schließsystem |
| DE102011002950A1 (de) | 2011-01-21 | 2012-07-26 | BSH Bosch und Siemens Hausgeräte GmbH | Vorrichtung mit einem beweglichen Vorrichtungsteil |
| DE102011001168A1 (de) | 2011-03-09 | 2012-09-13 | Miele & Cie. Kg | Verfahren zum Betrieb eines Haushaltgeräts |
| DE102011079534A1 (de) * | 2011-07-21 | 2013-01-24 | BSH Bosch und Siemens Hausgeräte GmbH | Geschirrspülmaschine und Verfahren zum Öffnen einer Tür einer Geschirrspülmaschine |
| JP2013027630A (ja) * | 2011-07-29 | 2013-02-07 | Hoshizaki Electric Co Ltd | 食器洗浄機 |
| JP6008756B2 (ja) | 2012-02-24 | 2016-10-19 | 三菱電機株式会社 | 電流センサおよび三相交流用電流センサ装置 |
| DE102012223775A1 (de) | 2012-12-19 | 2014-06-26 | BSH Bosch und Siemens Hausgeräte GmbH | Haushaltsgerät mit einem Körperschallsensor, System und entsprechendes Verfahren |
| CN103006156B (zh) * | 2012-12-28 | 2015-04-15 | 苏州韩博厨房电器科技有限公司 | 一种自动洗碗机 |
| DE102014007172A1 (de) | 2014-05-15 | 2015-11-19 | Diehl Ako Stiftung & Co. Kg | Vorrichtung zur Bedienung eines elektronischen Geräts |
| FR3023162A1 (fr) | 2014-07-02 | 2016-01-08 | Ac & Co Technologies | Appareil de massage comprenant un empilement de cellules gonflables/degonflables inclinees et en chevauchement les unes par rapport aux autres |
| DE102015205602A1 (de) * | 2015-03-27 | 2016-09-29 | Meiko Maschinenbau Gmbh & Co. Kg | Reinigungsvorrichtung und Verfahren zum Reinigen von Reinigungsgut |
| CN105167727A (zh) * | 2015-08-14 | 2015-12-23 | 浙江法斯特电梯有限公司 | 一种自动循环洗碗机 |
| DE102016205367A1 (de) | 2016-03-31 | 2017-10-05 | Meiko Maschinenbau Gmbh & Co. Kg | Reinigungsvorrichtung und Verfahren zum Reinigen von Reinigungsgut |
-
2016
- 2016-03-31 DE DE102016205367.1A patent/DE102016205367A1/de active Pending
-
2017
- 2017-03-30 WO PCT/EP2017/057540 patent/WO2017167874A1/de not_active Ceased
- 2017-03-30 PL PL17714452.4T patent/PL3324811T5/pl unknown
- 2017-03-30 ES ES17714452T patent/ES2812832T5/es active Active
- 2017-03-30 CN CN201780001589.9A patent/CN107635449B/zh active Active
- 2017-03-30 ES ES20173746T patent/ES2909786T3/es active Active
- 2017-03-30 EP EP20173746.7A patent/EP3753468B1/de active Active
- 2017-03-30 PL PL20173746T patent/PL3753468T3/pl unknown
- 2017-03-30 EP EP17714452.4A patent/EP3324811B2/de active Active
- 2017-10-30 US US15/797,785 patent/US10617277B2/en active Active
-
2020
- 2020-03-03 US US16/808,027 patent/US11253132B2/en active Active
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3589787A (en) † | 1969-11-12 | 1971-06-29 | Alco Standard Corp | Dishwasher door operator |
| US4073555A (en) † | 1975-12-22 | 1978-02-14 | Noren Tore H | Dishwasher with downwardly movable door counterbalanced by spring-biased toggle joints |
| EP0541974A1 (de) † | 1991-11-12 | 1993-05-19 | Miele & Cie. GmbH & Co. | Haushaltgerät, insbesondere Geschirrspülmaschine oder Herd mit einem durch eine Gerätetür verschliessbaren Spül- oder Backraum |
| DE19514303A1 (de) † | 1995-04-25 | 1996-10-31 | Miele & Cie | Spülautomat insbesondere für den Labor- und Krankenhausbereich, mit einem durch eine Hubtür verschließbaren Spülraum |
| DE10054392A1 (de) † | 2000-11-02 | 2002-05-08 | Winterhalter Gastronom Gmbh | Antriebsvorrichtung |
| DE102006061083A1 (de) † | 2006-12-22 | 2008-06-26 | BSH Bosch und Siemens Hausgeräte GmbH | Kältegerät mit Türöffnungshilfe |
| DE102008021496A1 (de) † | 2008-04-29 | 2009-11-05 | Miele & Cie. Kg | Haushaltsgerät |
| DE102008028313A1 (de) † | 2008-06-13 | 2009-12-17 | BSH Bosch und Siemens Hausgeräte GmbH | Kapazitiver Berührungsschalter für ein Haushaltsgerät |
| DE102010037397A1 (de) † | 2010-09-08 | 2012-03-08 | Miele & Cie. Kg | Haushaltgerät, insbesondere grifflose Geschirrspülmaschine |
| DE102011004019A1 (de) † | 2011-02-14 | 2012-08-16 | Siemens Aktiengesellschaft | Elektrisch angetriebene Tür |
| DE102012223219A1 (de) † | 2012-12-14 | 2014-06-18 | BSH Bosch und Siemens Hausgeräte GmbH | Haushaltsgerät |
| DE102013224148A1 (de) † | 2013-11-26 | 2015-05-28 | Siemens Aktiengesellschaft | Verfahren zur Steuerung eines elektrischen Antriebs einer Tür oder eines Türflügels sowie Türsteuereinrichtung |
| DE102014107544A1 (de) † | 2014-05-28 | 2015-12-03 | Miele & Cie. Kg | Backofen |
| DE102014111718B3 (de) † | 2014-08-18 | 2015-12-03 | Miele & Cie. Kg | Spülautomat, insbesondere Desinfektionsautomat oder Endoskopspüler |
Non-Patent Citations (4)
| Title |
|---|
| Betriebsanleitung zur Haubenspülmaschine AMX/AUX † |
| Comic-Cards zum Thema "Haubenlift" † |
| Ergänzende Installations- und Betriebsanleitung zum Thema„Haubenlift" † |
| Preisliste vom 01.10.2008 † |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2812832T3 (es) | 2021-03-18 |
| US20180055329A1 (en) | 2018-03-01 |
| HK1245045A1 (zh) | 2018-08-24 |
| PL3753468T3 (pl) | 2022-05-23 |
| CN107635449A (zh) | 2018-01-26 |
| EP3753468A1 (de) | 2020-12-23 |
| WO2017167874A1 (de) | 2017-10-05 |
| ES2909786T3 (es) | 2022-05-10 |
| US20200196828A1 (en) | 2020-06-25 |
| ES2812832T5 (en) | 2025-08-20 |
| DE102016205367A1 (de) | 2017-10-05 |
| PL3324811T3 (pl) | 2020-11-16 |
| US11253132B2 (en) | 2022-02-22 |
| EP3324811A1 (de) | 2018-05-30 |
| US10617277B2 (en) | 2020-04-14 |
| PL3324811T5 (pl) | 2025-11-03 |
| EP3753468B1 (de) | 2022-01-19 |
| CN107635449B (zh) | 2021-10-01 |
| EP3324811B1 (de) | 2020-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3324811B2 (de) | Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut | |
| EP2280631B1 (de) | Geschirrspülmaschine | |
| EP3697281B1 (de) | Haushaltsgerät | |
| EP4026474B1 (de) | Geschirrspülmaschine | |
| WO2011039362A1 (de) | Türvorrichtung für ein hausgerät, hausgerät mit einer derartigen türvorrichtung sowie verfahren zum betätigen einer türvorrichtung für ein hausgerät | |
| EP3085294A1 (de) | Hebevorrichtung und geschirrspülmaschine | |
| EP3393329B1 (de) | Geschirrspülmaschine mit einer hebevorrichtung und verfahren zum betreiben einer hebevorrichtung | |
| DE102005010616A1 (de) | Geschirrspülmaschine mit einem Lagerungsbehälter | |
| EP3463031B1 (de) | Haushaltsgeschirrspülmaschine | |
| DE102012207836A1 (de) | Haushaltsgerät | |
| DE102017213699B4 (de) | Haushaltsgeschirrspülmaschine | |
| EP3273836B1 (de) | Reinigungsvorrichtung und verfahren zum reinigen von reinigungsgut | |
| EP4161338B1 (de) | Richtungsabhängige aktivierung der türbetätigung einer haushaltsgeschirrspülmaschine | |
| EP2734100B1 (de) | Geschirrspülmaschine und verfahren zum öffnen einer tür einer geschirrspülmaschine | |
| DE102007007954B3 (de) | Eckschrank, insbesondere Kücheneckschrank | |
| EP4370005B1 (de) | Haushaltsgeschirrspülmaschine | |
| DE102008047556B3 (de) | Vorrichtung mit einem Griff | |
| DE102016201727B4 (de) | Hebevorrichtung, Verfahren zum Betreiben einer Hebevorrichtung und Geschirrspülmaschine | |
| DE102020100015A1 (de) | Geschirrspülmaschine, insbesondere Haushaltsgeschirrspülmaschine | |
| EP4491088B1 (de) | Geschirrspülmaschine | |
| DE102016222351B4 (de) | Hebevorrichtung und Geschirrspülmaschine | |
| EP2851499A1 (de) | Verfahren zum Betrieb wenigstens eines elektromotorisch angetriebenen Türflügels |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20180226 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20191111 |
|
| INTG | Intention to grant announced |
Effective date: 20191111 |
|
| INTG | Intention to grant announced |
Effective date: 20191118 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502017005446 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1273641 Country of ref document: AT Kind code of ref document: T Effective date: 20200615 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: SCHMAUDER AND PARTNER AG PATENT- UND MARKENANW, CH |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200928 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200927 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200827 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200828 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200827 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502017005446 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2812832 Country of ref document: ES Kind code of ref document: T3 Effective date: 20210318 |
|
| 26 | Opposition filed |
Opponent name: HOBART GMBH Effective date: 20210219 |
|
| 26 | Opposition filed |
Opponent name: WINTERHALTER GASTRONOM GMBH Effective date: 20210226 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 |
|
| PLAF | Information modified related to communication of a notice of opposition and request to file observations + time limit |
Free format text: ORIGINAL CODE: EPIDOSCOBS2 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210330 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210330 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210331 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PK Free format text: BERICHTIGUNGEN |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PK Free format text: BERICHTIGUNGEN |
|
| RIC2 | Information provided on ipc code assigned after grant |
Ipc: A47L 15/46 20060101ALN20221208BHEP Ipc: A47L 15/24 20060101ALN20221208BHEP Ipc: A47L 15/42 20060101ALI20221208BHEP Ipc: A47L 15/00 20060101AFI20221208BHEP |
|
| RIC2 | Information provided on ipc code assigned after grant |
Ipc: A47L 15/46 20060101ALN20221214BHEP Ipc: A47L 15/24 20060101ALN20221214BHEP Ipc: A47L 15/42 20060101ALI20221214BHEP Ipc: A47L 15/00 20060101AFI20221214BHEP |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| APBM | Appeal reference recorded |
Free format text: ORIGINAL CODE: EPIDOSNREFNO |
|
| APBP | Date of receipt of notice of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA2O |
|
| APBM | Appeal reference recorded |
Free format text: ORIGINAL CODE: EPIDOSNREFNO |
|
| APBP | Date of receipt of notice of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA2O |
|
| PLAB | Opposition data, opponent's data or that of the opponent's representative modified |
Free format text: ORIGINAL CODE: 0009299OPPO |
|
| R26 | Opposition filed (corrected) |
Opponent name: HOBART GMBH Effective date: 20210219 |
|
| APBQ | Date of receipt of statement of grounds of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA3O |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230508 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20170330 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200527 |
|
| APBU | Appeal procedure closed |
Free format text: ORIGINAL CODE: EPIDOSNNOA9O |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20250307 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250331 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20250326 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20250321 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20250220 Year of fee payment: 9 Ref country code: FR Payment date: 20250326 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250322 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20250324 Year of fee payment: 9 |
|
| PUAH | Patent maintained in amended form |
Free format text: ORIGINAL CODE: 0009272 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: PATENT MAINTAINED AS AMENDED |
|
| 27A | Patent maintained in amended form |
Effective date: 20250625 |
|
| AK | Designated contracting states |
Kind code of ref document: B2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R102 Ref document number: 502017005446 Country of ref document: DE |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20250401 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250327 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20250401 Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: RPEO |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: DC2A Ref document number: 2812832 Country of ref document: ES Kind code of ref document: T5 Effective date: 20250820 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |