EP2911871B1 - Antriebsvorrichtung - Google Patents
Antriebsvorrichtung Download PDFInfo
- Publication number
- EP2911871B1 EP2911871B1 EP13736530.0A EP13736530A EP2911871B1 EP 2911871 B1 EP2911871 B1 EP 2911871B1 EP 13736530 A EP13736530 A EP 13736530A EP 2911871 B1 EP2911871 B1 EP 2911871B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- force
- transmission element
- output
- drive
- input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B30—PRESSES
- B30B—PRESSES IN GENERAL
- B30B1/00—Presses, using a press ram, characterised by the features of the drive therefor, pressure being transmitted directly, or through simple thrust or tension members only, to the press ram or platen
- B30B1/10—Presses, using a press ram, characterised by the features of the drive therefor, pressure being transmitted directly, or through simple thrust or tension members only, to the press ram or platen by toggle mechanism
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B30—PRESSES
- B30B—PRESSES IN GENERAL
- B30B1/00—Presses, using a press ram, characterised by the features of the drive therefor, pressure being transmitted directly, or through simple thrust or tension members only, to the press ram or platen
- B30B1/10—Presses, using a press ram, characterised by the features of the drive therefor, pressure being transmitted directly, or through simple thrust or tension members only, to the press ram or platen by toggle mechanism
- B30B1/14—Presses, using a press ram, characterised by the features of the drive therefor, pressure being transmitted directly, or through simple thrust or tension members only, to the press ram or platen by toggle mechanism operated by cams, eccentrics, or cranks
Definitions
- the present invention relates to a drive device, in particular for driving a forming device, with a drive unit that provides a driving force or a drive torque, an output unit having an input member and a translationally movable output member, wherein the output unit has a progressive force-displacement curve between the Input member and the output member having, and with a transmission element which is rotatably mounted at a pivot point, wherein the transmission element is connected to the drive unit such that a torque is transferable to the transmission element, and wherein the transmission element has a Weganlenkddling to which a connecting element is articulated, which forms a toggle lever with the transmission element, wherein the connecting element is connected to the input member of the output unit such that a force on the output unit is transferable.
- Such drive devices serve to provide the output member a defined force-displacement curve, for example, to drive or press a press or a punch.
- hydraulic drives are preferably used, since these provide an approximately constant force curve for longer strokes.
- Different speed curves can be set well in hydraulic drives by controlling the flow rate and a switching point between rapid and working stroke can be chosen arbitrarily.
- a disadvantage of the hydraulic drives is the compressibility of the hydraulic oil, which is a compression in the higher single-digit percentage range at the necessary system pressures. This compressibility results in a high heat development, which has a negative effect on the energy balance of the hydraulic process. Further, the compressibility of the hydraulic oil, the control of the force-displacement curve of the tool is affected, and the force is applied with low rigidity. Therefore, for example, calibration processes are possible only with oversized forces, as a hard knocking is made difficult by the softness of the force. At the completion of a punching process is due to the compressibility highly stored spring energy suddenly released. The resulting cutting impact generates a high noise emission.
- servo drives in the machining of workpieces allows the forming processes to be controlled over a very wide range, both in hydraulic and in mechanical drives.
- controllable servomotors are connected to roller spindles, which are installed directly in the main power flow.
- the drive system is designed according to the highest peak force and limited the stroke speed to the maximum possible speed of the spindle, which is well below the travel speed of a hydraulic cylinder.
- the servo motor with extremely high torque without spindle or gear stage can be connected directly to a drive shaft of an eccentric or toggle lever.
- the entire system must be designed according to the absolute torque or force peaks, so that the technical complexity is to be regarded as significantly higher than is actually technically necessary.
- a drive for a press in which the drive shaft without spindle or gear stage is driven, for example, is known from the DE 10 2005 038 583 A1 ,
- a disadvantage of the well-known drive devices is that they are technically complex and / or depending on the drive technology are set to a system-related force-displacement curve.
- the publication DE 20 2006 004 470 U1 shows a press-hardening press with a frame which comprises a press table and is mounted with a vertically movable plunger by means of a knee-joint mechanism to the press frame and vertically movable.
- the publication FR 2486 451 A1 shows a further press arrangement according to the preamble of claim 1,
- a drive device comprising a drive device, in particular for driving a forming device, comprising: at least one drive unit, which provides a drive force or a drive torque, an output unit comprising an input member and a translationally movable output member wherein the output unit has a progressive force-displacement profile between the input member and the output member, a transmission element which is rotatably mounted at a pivot point, wherein the transmission element is connected to the drive unit such that a torque is transferable to the transmission element, and wherein the transmission element has an input coupling point and an output coupling point, wherein at the toastanlenkddling a connecting element is articulated, which forms a toggle lever with the transmission element wherein the connecting element with the Input member of the output unit is connected such that a force on the output unit is transferable, wherein an angle of the toggle lever is interchangeable for an initial position of the output member to adjust the force-displacement curve of the output member, wherein the transmission element
- a force-displacement curve of the transmission element can be selected in the same direction or in opposite directions to the force-displacement curve of the output unit in order to set the force-displacement curve of the output element.
- a press module for a forming device with a translationally movable plunger and with at least one drive device for driving the plunger according to the first aspect or according to an embodiment of the present invention is achieved by a press module for a forming device with a translationally movable plunger and with at least one drive device for driving the plunger according to the first aspect or according to an embodiment of the present invention.
- the angle of the toggle lever is adjustable, which is connected to the output member having a progressive force-displacement curve
- the force-displacement curve of the transmission element is variably adjustable, so that at the output member different force-displacement curves can be provided. This is achieved in that at different angles of the toggle lever different leverage and thus different power transmission of the toggle lever can be adjusted.
- the force-displacement profile of the transmission element can be selected in the same direction or in opposite directions to the force-displacement curve of the output unit, by adding the force-displacement characteristics of the transmission element and the output unit, an almost arbitrary force can be achieved. Path-course of the output element can be adjusted.
- the transmission element has two separate transmission members, which is rotatably mounted about the pivot point, wherein the matterssanlenk Vietnamese and the Profishaw Vietnamese are each formed on one of the transmission members, wherein the transmission members are rotatably connected to each other in different angles of rotation.
- the angle of the second toggle lever can be adjusted with little effort, since the two transmission members are simply rotated relative to each other and can be connected to one another in different angles of rotation. As a result, the handling of the transmission element in general and the adjustment of the angle of the toggle lever is easier.
- the drive device according to the first aspect thus can be used for different processing or forming steps, whereby the drive device can be used flexibly. Accordingly, the object of the invention is completely solved.
- the Huaweianschddling of the connecting element is connected to the input member of the output and a length of the connecting element or a distance between the Ninsch Vietnamese and the input member adjustable.
- the angle of the toggle lever and thus a lever of the toggle lever over the working stroke can be adjusted with little effort, whereby the force-displacement curve of the transmission element with little effort is adjustable.
- pivot point of the transmission element is made displaceable relative to the output unit.
- the angle of the toggle lever can be changed and thus set a lever of the transfer member Uber the working stroke, at the same time the transmission member and the connecting element can be made technically less expensive.
- an angular position of the Ninth Sears is designed to be changeable for the starting position of the output member.
- the angle of the toggle lever can be adjusted, whereby different force-displacement curves of the transmission element can be adjusted.
- the prayeranschddling is mounted on an eccentric hub on the transmission element to the angle of Adjust knee lever.
- the eccentric hub is preferably fixed in different rotational positions on the transmission element.
- the angle can be adjusted with a high degree of freedom and with little effort.
- the eccentric hub is preferably fixable in different rotational positions on the transmission element to adjust the angle of the second toggle lever.
- the angle of the second knee lever can be adjusted continuously, whereby the variation of the Kraftwegverlaufs the output member is more flexible and adjustable with little effort.
- the connecting element is mounted on the output unit by means of an eccentric hub to adjust the angle of the knee lever.
- the eccentric hub is preferably fixable in different rotational positions on the output unit in order to realize the different storage positions.
- the angle of the toggle lever can be adjusted with little effort, whereby the flexibility in the adjustment of the Kraftwegverlaufes the output member can be further increased.
- the contestanlenkddling the transmission element, theroisanlenk Vietnamese the transmission element and the connecting element on the output unit each supported by an eccentric hub, so that a versatile variable adjustment of the Kraftwegverlaufes the drive device can be provided in general.
- an input connection point is formed on the transmission element, to which an input connection element is articulated, which forms a second toggle lever with the transmission element.
- an angle between the entrance center point and the exit connection point is designed to be exchangeable or adjustable.
- a linear adjustment device is formed on the transmission element, on which the input connection point is mounted.
- the drive unit provides a drive torque, wherein the drive unit is connected directly or by means of a connecting rod with the transmission element.
- the drive unit has an eccentric drive.
- the drive device can be driven by means of a continuous electric motor.
- the drive unit has a spindle drive.
- the drive unit is connected to the input connection point by means of a connection unit which has at least one connecting rod.
- the power can be transmitted from the drive unit to the transmission element, whereby the second toggle lever can be realized at the same time with a technically low outlay.
- connection unit has a lever which is connected to the input connection point.
- lever arm of the lever is designed to be adjustable.
- lever is designed as a one-sided lever.
- lever is designed as a two-sided lever.
- the lever is designed as a triangular lever having two pivot points and a bearing point, which span a triangle.
- the ratio of the force of the drive to the introduction of force into the input connection point during the stroke can be varied with technically simple means, whereby the force-displacement curve is additionally variably adjustable, in particular smoothed.
- connection unit has a second rotatably mounted transmission element with two articulation points, wherein an angle between the articulation points is exchangeable.
- the force-displacement curve of the output member can be set even more precisely.
- the output unit has a knee joint.
- the output unit is formed by an eccentric.
- the output unit can be realized with technically simple means in a compact design.
- different force-displacement characteristics of the output member can be adjusted by the different variations of the drive device, whereby a total of the variability of the drive device for different steps, in particular for forming workpieces, can be used.
- Different large forces can be set constant or linearly increasing over the working stroke or progressively, ie with an exponential force curve over the working stroke.
- the force or torque to be provided by the drive unit remains constant over the entire stroke course, despite the different characteristics. Power peaks do not occur.
- a drive device can be used for different processing methods, taking advantage of the different power transmissions.
- a drive device is shown schematically and generally designated 10.
- the drive device 10 serves to drive a forming device 12.
- the drive device 10 and the forming device 12 form a module, in particular a press module.
- the drive device 10 has a drive unit 14 and an output unit 16.
- the drive unit 14 is connected via a transmission element 18 to the output unit 16.
- the output unit 16 is formed in this embodiment as a toggle lever, which is generally mechanically connected via an input member 20 to the transmission element 18.
- the output unit 16 further generally has an output member 22 which is linearly or translatorily movable and is connected in the application schematically shown here with a plunger 24 which carries a lower part of a tool 24 in the forming device 12.
- the transmission element 18 is rotatably mounted about a pivot point 26.
- the transmission element 18 has a first connection point 28, which forms an output connection point 28 of the transmission element 18.
- the transmission element 18 also has a second articulation point 30, which forms an input articulation point 30 of the transmission element 18.
- the input linkage 30 is connected to the drive unit 14 via an input link 32.
- the concertanlenkddling 28 is connected via an output connecting element 34 to the output unit 16 and to the input member 20 of the output unit 16.
- the drive unit 14 is designed as a spindle drive 14 and transmits a force to the input connection point 30 via the input connection element 32, which in this particular embodiment is designed as a connecting rod the power in Fig. 1 is shown schematically by an arrow 36.
- the input coupling point 30 can also be connected directly to the spindle of the spindle drive 14.
- a torque is transmitted to the rotatably mounted transmission element 18, wherein the torque is schematically represented by an arrow 38.
- the torque 38 is transmitted to the input member 20 via the output connector 34 so that a corresponding force is transmitted to the output member 22 to move the plunger 24, as schematically indicated by an arrow 40.
- the output unit 16 is formed in this embodiment as a toggle lever and has a progressive force-displacement curve between the input member 20 and the output member 22. In other words, the force exerted on the plunger 24 increases with increasing stroke. This is due to the particular leverage of the bell crank 16.
- the drive unit 14 may also be a servo-controlled hydraulic cylinder.
- the output link 34 which is articulated at the Vietnamese spirit, forms, together with the rotatably mounted at the pivot point 26 transmission element 18 is a Congressskniehebel 42 having a characteristic force-displacement curve.
- the force-displacement curve is adjustable via an angle 44 of the toggle lever 42 of the Vietnamese spirit, and the like.
- the angle 44 is adjustable or exchangeable for a specific starting position of the output member 22 or for a predefined position of the output member 22, so that a working stroke of the drive apparatus 10 begins at different settings with different values of the angle 44.
- force-displacement characteristics of the transmission element 18 can be adjusted, which run in the same direction or in opposite directions to the force-displacement curve of the output unit 16, so that as a result different force-displacement characteristics of the output member 22 can be adjusted.
- the input link 32 which is hinged to the input link 30, forms an input link 46 together with the transfer element 18.
- the input link 46 has an angle 48 formed between the input link 32 and the pivot 26 at the input link 30.
- the working stroke of the connecting member 34 starts with a large force (reverse toggle lever) that drops over the power stroke and at an angle 44 of about 90 ° with a small Value ends.
- a force-displacement curve of the output member 22 which is trough-shaped, concave, develops in the sum with the progressive course of the toggle lever 16, with higher forces at the beginning and at the end and a low point in the middle region .
- the force-displacement curve of the output member 22 is greatly smoothed and comes relatively close to a constant course over a wide stroke range. Exceptions are the extreme positions, especially the end of the stroke, since in the extended position the force of the toggle lever goes to infinity. If necessary, the stroke should therefore be stopped beforehand. If, however, the angle 44 is set to a value of about 90 ° in an initial position of the output member 22, the working stroke of the connecting element 34 begins with a small force which increases over the working stroke and ends at an angle 44 of near 180 ° with a maximum , This progressive course reinforces the likewise progressive course of the output member 22. This results in a highly progressive, at the end of the working stroke extremely increasing force-displacement curve of the output member 22, as explained in more detail below. This course can be additionally influenced by a variation of the angle 48, namely again amplified or attenuated.
- the force-displacement characteristic of the output member 22 can be set differently depending on the angle 44 for an initial position of the output member 22, whereby the drive device 10 can be used for different operations.
- the variably adjustable additional angle 48 of the force-displacement curve of the output member 22 is almost arbitrarily adjustable.
- Fig. 2a to c an embodiment of the drive device 10 for different positions of the power stroke S is shown schematically and wherein in Fig. 2d the resulting force-displacement curve of this embodiment is shown.
- the transmission element 18 is designed as a rigid, one-piece triangular lever, wherein the angle 44 in an initial position of the output member 22 has approximately 90 °.
- the angle 48 of the input lever 46 is about 45 ° in the home position.
- the input linkage point 30, the output linkage point 28 and the pivot point 26 span an angle of about 100 °.
- Fig. 2d are the individual positions of the working stroke that are in the FIGS. 2a to c are shown correspondingly labeled S1, S2 and S3. It follows that the force that is transmitted through from output member 22, for the working stroke S1 and S2 from the FIGS. 2a and b only slightly different, since the leverage in the two rotational positions of the transmission element 18 only slightly changes, whereas the force for the working S3, the position of Fig. 2c corresponds, is significantly larger, since the lever of the mattersskniehebels 46 is particularly favorable and the lever of the Ninkniehebels 42 is stretched particularly flat.
- FIGS. 3a to c show the drive device 10 in three different positions of the power stroke S and Fig. 3d shows an associated force-displacement curve for the three positions of the power stroke S.
- the drive device 10 corresponds to the drive device of the FIGS. 2a to c wherein the transmission element 18 is formed with changed angles 44, 48 of the output knee lever 42 and the input knee lever 46.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the transmission element 18 is formed in this embodiment as a one-piece rigid element in which the matterssanlenk Vietnamese 30, the Camillanlenk Vietnamese 28 and the pivot point 26 form an angle of about 190 °.
- S1 the angle 44 of the Vietnameseskniehebels 42 is very small and the angle 48 of the mattersskniehebel 46 about 90 °.
- S1 the position of the working stroke, which is in Fig.
- the in the FIGS. 2a to c and 3a to c illustrated transmission elements 18 are formed as a rigid one-piece elements with a fixed angle between the matterssanlenkddling 30 and the réelleanlenkddling 28, so that a change of the angle 44 of the Vietnameseskniehebels 42 can be done only by replacing the transmission element 18.
- Fig. 4a to c an alternative embodiment of the transmission element 18 is shown in different mounting positions and in different positions of the power stroke S.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the transmission element 18 is designed as a rigid element and in this embodiment has a semicircular disk shape.
- the transmission element 18 has four connection positions, which are formed as round recesses are.
- the terminal positions serve to connect the input connector 32 in different positions to the transmission member 18 and to articulate at the different positions, respectively, to realize different angles of the output knee lever 42 or the input knee lever 46.
- One of the terminal positions serves to rotatably support the transmission element 18 at different positions and to form the pivot point 26 accordingly.
- each two different connection or storage options of the transmission element 18 are shown, wherein a first connection variant is shown by solid lines and a second connection variant is shown with dashed lines.
- the input connection point 30 and the output connection point 28 are arranged at an angle of approximately 190 ° relative to the pivot point 26, so that in the in Fig. 4a illustrated starting position of the working stroke S1 of the angle 44 of the output Ziehhebel 42 is about 90 ° and the angle 48 of the input Ziehhebel 46 has an obtuse angle of about 120 °.
- the transmission element 18 is mounted rotatably offset to the right at the output unit 16 at the pivot point 26 ', wherein the matterssanlenkddling 30' relative to the first connection variant is offset by about 90 °, so that in the in Fig. 4a illustrated starting position of the working stroke S1 of the angle 44 'of the Vietnamese tokens 42' is an acute angle of about 30 ° and the angle 48 'of the matterssskniehebels 46 about 90 °.
- Fig. 4d two force-displacement curves for the two installation variants of the transmission element 18 are shown in accordance with a solid and a dashed line. Due to the special adjustment of the angle 44, 48 over in the FIGS. 4a to c shown working stroke positions S1, S2, S3, the transmission element 18 in the first installation variant on a progressive force-displacement curve, so that as a result of the total force-displacement curve of the output member 22, the in Fig. 4d is shown, has a progressive course.
- the transmission element 18 on a force-displacement curve which is in opposite directions to the progressive force-displacement curve of the output unit 16 or in other words in the position S1, a large power transmission in the position S2, an average power transmission, in the As a result, the total force-displacement curve of the output member 22 over the working stroke between S1 and S3 is substantially constant, as shown in FIG Fig. 4d is shown.
- the transmission element 18 can be installed or connected so that different force-displacement profiles of the output member 22 are adjustable.
- FIGS. 5a to c is a variant of the drive device 10 from the FIGS. 4a to c with an additional intermediate lever, which is connected between the drive unit 14 and the matterssanlenk Vietnamese 30, shown schematically.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- FIGS. 5a to c a first variant is shown in solid lines, in which the drive unit 14 is connected to a one-sided triangle lever 50 in order to transmit the introduced force 36 to the nowadayssanlenkddling 30.
- the triangular lever 50 is designed as a one-sided lever and has a bearing point 52 and two articulation points 54, 56 for a connecting rod of the drive unit 14 and for an output connecting rod for connecting to the transmission element 18.
- Fi Guren 5a to c is a second connection variant without the triangle lever 50 shown with dashed lines, which essentially the second connection variant of the FIGS. 4a to c equivalent.
- the action of the input force 36 in addition to the variation in the force acting angle 48 is further modified by the relative difference between the resultant lever arms of the force direction 36 and the connecting rod between the pivot points 56 and 30 relative to the fulcrum 52 the working stroke position S1, the lever arm of the driving force 36 with respect to the fulcrum 52 is greater than the resultant lever arm of the Vietnamesespleuels.
- the input force 36 is amplified in its effect on the input connection point 30.
- the ratio is reversed, the input force 36 is thus reduced in their effect.
- the ratio is balanced.
- FIGS. 6a to c is a further variant of the drive device 10 is shown schematically.
- the drive unit 14 is connected via a variable one-sided lever 60 with the matterssanlenk Vietnamese 30 of the transmission element 18.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- FIGS. 6a to c two variants of the connection of the one-sided lever 60 are shown, wherein a variant with a small lever is shown by solid lines and a second connection variant with a large lever is shown with dashed lines.
- the one-sided lever 60 is mounted at one bearing point 62 on one side and has a Weganlenkddling 64, which forms a fixed lever to the bearing point 62 and further has an etc.
- the matterssanlenkddling 66 which is connected to the drive unit 14, wherein the matterssanlenk Vietnamese 66 variable or slidably is formed so that the lever of the matterssanlenk Vietnamese 66 can be varied relative to the bearing point 62.
- Fig. 6d are two force-displacement curves of the two connection variants from the FIGS. 6a to c for the different working stroke positions S1, S2, S3, wherein the variant with small lever of the one-sided lever 60 is shown in a solid line and the second variant with a large lever of the one-sided lever 60 as a dashed line.
- the maximum force transmitted by the drive device 10 can be varied, as shown in FIG Fig. 6d is shown, the force-displacement curve is only shifted in parallel. This results in a further possibility of variation for the use of the drive device 10.
- FIGS. 7a to c is a further adjustment variant of the drive device 10 with the one-sided lever 60 shown.
- the transmission element 18 with respect to the variants Fig. 6a to c even closer to the output unit 16 towards offset rotatably mounted.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- Fig. 8 shows a further embodiment of the drive device 10 with a length-adjustable output connector 34.
- the same effect is achieved as with the displacement of the pivot point 26 of the transmission element 18, namely the variation of the angle 44.
- the pivot point 26 can therefore remain fixed in this embodiment.
- a first variant with a short connecting element is in Fig. 8 shown with solid lines, whereas a second variant with extended connecting element is shown with dashed lines.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the transmission element 18 is formed as a rigid one-piece disc which is rotatably mounted at the pivot point 26.
- the transmission element 18 has three connection points at which the input connection element 32 can be steered at two different positions in order to adjust the angle 48 of the input knee lever 46, and the output connection element 34 is articulated at the output connection point 28.
- the output connector 34 has a length adjustment member 68 to vary a length of the output connector 34 and thereby adjust the angle 44 of the output knee lever 42.
- connection point 30 is formed in the outer terminal position, wherein the length adjustment member 68 is shortened such that the angle 44 in the in Fig. 8 illustrated Trustarbeithubposition is about 90 ° and by the choice of the connection position of the Anlenk Vietnameses 30 of the angle 48 of the matterssskniehebels 46 has about 120 °.
- the output connection point 28 can also be displaced in different connection variants in order to vary the angle 44.
- Fig. 9 an alternative embodiment of the drive device 10 is shown schematically, wherein the transmission element 18 is formed of two rotatable discs.
- the transmission element 18 has an input member 70 and an output member 72, wherein the matterssanlenk Vietnamese 30 is formed on the input member 70 and the réelleanlenk Vietnamese 28 on the output member 72.
- the input member 70 and the output member 72 are rotatably mounted at the pivot point 26.
- the input member 70 and the output member 72 are rotatable relative to each other and are rotatably connected to each other in different angles of rotation connectable (not shown) to transmit the torque 38 to the output unit 16.
- the input member 70 and the output member 72 are rotatably connected to each other in different angular positions connectable to different angular positions of the matterssanlenkwhis 30 and the technicallyanlenkiss 28 can be adjusted relative to each other. Further, the output connector 34 has the length adjustment member 68 to adjust the angle 44 of the output knee lever 42 accordingly.
- the drive unit 14 is connected via a two-sided lever 74 to the Taiwansanlenkddling 30, wherein a pivot point 76 of the drive unit 14 is slidably mounted on the two-sided lever 74 and the two-sided lever 74 is mounted at a pivot point 78 with fixed abutment.
- the relative rotation of the articulation points 28, 30 can be adjusted by the variable transmission element 18 with simple means and a few simple steps and wherein the length adjustment element 68, the angle 44 of the Ninkniehebels 42 can be adjusted by simple means.
- the force of the drive unit 14 can be deflected via the two-sided lever and the size of the transferable force can also be adjusted.
- Fig. 10 is a variant of the drive device 10 from Fig. 9 shown schematically.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the drive unit 14 is connected via the two-sided lever 74 to the Taiwansanlenk Vietnamese 30, in this embodiment, the abutment of the pivot point 78 is slidably and variably and the drive unit 14 is articulated by means of a fixed Anlenk Vietnameses 80 on the two-sided lever 74. Due to the particular embodiment of the two-sided lever 74 can also be as in the embodiment according to Figure 9 set different forces on the output member 22.
- Fig. 11 is another variant of the drive device 10 from Fig. 9 shown schematically.
- the same elements are designated by the same reference numerals, in which case only the special features are executed.
- the drive unit 14 is arranged laterally adjacent to the transmission element 18 and connected via the sliding articulation point 76 with the two-sided lever 74. As a result, the force 36 exerted by the drive unit 14 is transmitted in the same direction to the transmission element 18.
- a particularly compact design of the drive device 10 is generally possible.
- Fig. 12 is a further variant of the drive device 10 is shown schematically.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the drive unit 14 is connected in this embodiment via a triangular lever 82 with the nowadayssanlenkddling 30.
- the triangular lever 82 has an input pivot point 84 and an output pivot point 86 and is rotatably supported at a pivot point 88.
- the triangular lever 82 is rotatably mounted about the pivot point 88, which is mounted above the triangle lever 82.
- Fig. 13 is a variant of the drive device 10 from Fig. 12 shown schematically.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the triangular lever 82 is rotatably mounted about the pivot point 88, which is mounted below the triangular lever 82.
- the force 36 which is exerted by the drive unit 14, transmitted in the opposite direction to the articulation point 30.
- a thrust force becomes a tensile force and vice versa.
- FIGS. 14a and b is a detailed embodiment of the drive device 10 with a variable one-sided lever 60 and a variable transmission element 18 shown schematically in different working stroke positions.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the variable lever 60 is rotatably supported about the fulcrum 62.
- the output link 64 is connected to the input link 30 of the transfer element 18 via the input link 32.
- the input connection point 66 is connected via a connecting rod to the drive unit 14, which is designed as a spindle drive 14 in this embodiment.
- the etcsanlenkddling 66 is adjustable by means of an adjusting screw 90 in the axial direction of the one-sided lever 60, so that the lever travel, which acts between the inventorsanlenk Vietnamese 66 and the Vietnamese cuisine 64 and the pivot point 62, via the adjusting screw 90 is adjustable.
- the adjusting screw 90 is connected to a corresponding rotary control element 92 in order to simplify or automate the handling.
- the transmission element 18 has the input member 70 and the output member 72, which are rotatably connected to each other in different angles of rotation and are rotatably mounted about the pivot point 26.
- the input member 70 and the output member 72 each have a tooth portion 94 which are adjustable by means of a gear 96 relative to each other to adjust the angular position.
- the pivot point 26 is displaceably mounted and designed displaceable relative to the output unit 16 by means of an adjusting screw 98.
- the adjusting screw 98 is connected to a control element 100, preferably to adjust the corresponding position of the pivot point 26 by motor.
- Fig. 14a is shown an initial position of the working stroke, in which the angle 44 is about 90 ° and in Fig. 14b an end position of the power stroke is shown schematically, in which the angle 44 of the Harmonkniehebels is about 130 °. This results in a progressive force-displacement curve.
- FIGS. 15a and b is the detailed embodiment of the FIGS. 14a and b shown in an alternative setting with respect to the relative angular position of the matterssanlenk Vietnameses 30 and the Camillanlenk Vietnameses 28 and the pivot point 26.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the input member 70 and the output member 72 of the transmission element 18 are set at a different angular position to each other, so that a larger angle of about 270 ° between the matterssanlenk Vietnamese 30 and the Vietnameselenk Vietnamese 28 is realized relative to the pivot point 26.
- the pivot point 26 is relative to the setting of the FIGS. 14a, b offset to the output unit 16, so that a smaller angle 44 of the Huaweiskniehebels 42 in the starting position Fig. 15a is set. This results in an approximately constant force-displacement curve of the output member 22.
- Fig. 15b is an end position of the working stroke for the setting Fig. 15a shown.
- the three setting possibilities of the embodiment are sufficient Fig. 14 and 15 or by the three degrees of freedom of the drive device 10 from the Figures 14 and 15 set a variety of different force-displacement paths of the output member 22, which generally improves the possibility of variation of the drive device 10 and is automatable.
- Fig. 16a a further embodiment of the drive device 10 is shown schematically.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the transmission element 18 is formed by the input member 70 and the output member 72, which are rotatable relative to each other and rotatably connected to each other.
- the output connector 34 has the length adjustment member 68 to adjust the angle 44 accordingly.
- the drive unit 14 is connected via the two-sided lever 74 to a second transmission element 102, which is connected to the first transmission element 18 in order to transmit the force transmitted by the drive unit 14 as the torque 38 to the transmission element 18.
- the transmission element 102 has an input member 104 and an output member 106 which are rotatably mounted at a pivot point 108 and which are rotatable with each other and rotatably connected to each other.
- An input coupling point 110 is formed on the input element 104, and an output connection point 112 is formed on the output element 106.
- the input member 104 and the output member 106 are rotatably formed with each other and rotatably connected to each other to adjust different angular positions of the matterssanlenk Vietnameses 110 and the technicallyanlenk Vietnameses 112 relative to each other.
- the input linkage point 110 is connectable to the two-way lever 74 to transmit the power from the drive unit 14 to the transfer element 102.
- the concertanlenk Vietnamese 112 is connected by a connecting rod with the pivot point 30 of the transmission element 18 to a Force from the transmission element 102 to the transmission element 18 to transmit.
- Fig. 16b is a variant of the embodiment of Fig. 16a shown.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the length adjustment element 68 is set in this embodiment such that the articulation point of the output unit 16 is offset and the output member 22 is moved by a tensile load of the Anlenkddlings up and a pressure load down. As a result, the direction of movement of the output member 22 can be reversed for the same movement of the drive unit 14.
- Fig. 16c is another embodiment of the drive device 10 from Fig. 16a illustrated in which the output unit 16 has a plurality of different pivot points to allow a length adjustment and a force / displacement variation.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the output unit 16 has a rigid plate or disc which is rotatably mounted and is articulated to a driven connecting rod, which is connected to the output member 22 and forms a toggle lever.
- the rigid disc has a plurality of different articulation points 113 ', 113 ", 113"', on which the input member 20 can be articulated.
- Fig. 16d a further embodiment of the drive device 10 is shown schematically, in which the transmission element 102 is connected by means of a length adjustment element with the output unit 16, in this embodiment has a rigid plate or disc with three points of articulation and forms a toggle lever.
- the same elements are designated by the same reference numerals, only special features are explained here.
- the direction of movement of the output member 22 can be reversed so that the output member 22 is moved upward, as the Ninanschddling 112 is moved upward, as by a Arrow 115 is indicated.
- the direction of movement of the output member 22 can be reversed with simple means and at the same time the required installation space for the drive device 10 can be reduced.
- Fig. 16e a further embodiment of the drive device 10 is shown schematically.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the drive device 10 off Fig. 16e is opposite to the embodiment Fig. 16d two output units 16, 16 ', which are formed by two parallel toggle lever and are connected to each other by means of a connecting rod 117.
- the connecting rod 117 connects the two output units 16, 16 'such that the two output members 22, 22' are moved in parallel with the same force / displacement curve. As a result, a more uniform distribution of force on the tool 24 can be achieved.
- Fig. 16f a further embodiment of the drive device 10 is shown schematically, in which the partssanlenk Vietnamese 30 is continuously linearly adjustable and different réelleanlenka 28 can be selected.
- the same elements are designated by the same reference numerals, only special features are explained here.
- the The designedsanlenk Vietnamese 30 is mounted by means of a linear adjustment 119 on the transmission element 18 linearly adjustable at different distances to the pivot point 26 to the lever of the corresponding Koreaskniehebels 46.
- the transfer element 18 has different output linkage points 28, 28 ', 28 "to articulate the link 34 on the transfer element 18 in different positions and adjust the angle of the corresponding bellcrank 42.
- the link 34 has different points of attachment to different lengths
- the connecting element 34 may alternatively or additionally have the length adjustment element 68.
- the mode of operation of the mounting of the connecting element 34 at the output connection points 28, 28 ', 28 is explained in more detail below.
- Fig. 16g is a variant of the embodiment of Fig. 16f shown schematically.
- the same elements are designated by the same reference numerals, only special features are explained here.
- the connecting element 34 in this case has different connection points to the connecting element 34 at the various Jerusalemanschddlingen 28, 28 ', 28 "and a plurality of connection points or bearing points in order to fix the connecting element 34 to the input member of the output unit 16.
- the output unit 16 also has a plurality of articulation points 20, 20 ', which can form the input member 20, 20' of the output unit 16 and can be correspondingly connected differently with the connecting element 34. As a result, a plurality of variations of the Adjusting the angle 44 of the bell crank 42 possible.
- Fig. 17 is a variant of the drive device 10 from Fig. 9 shown schematically with an alternative output unit.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the output connection element 34 with the length adjustment element 68 is connected to an eccentric 114, which forms the output unit of the drive device 10.
- the eccentric 114 has the input member 20 which is rotatably mounted eccentrically about a pivot point 116 and the output member 22 moves according to translational depending on the rotational position.
- an output unit 16 can be formed by simple means.
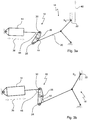
- FIG. 18 an alternative embodiment of the drive device 10 is shown schematically with an alternative drive unit.
- the drive device 10 has an eccentric 118, which forms the drive unit.
- the eccentric 118 is mounted eccentrically about a pivot point 120 and is driven with a torque by a drive unit, so that a force can be transmitted to the transmission element 18 by means of the input connection element 32.
- the drive device 10 can be driven by simple means.
- the input connection element 32 of the eccentric 118 is connected directly to the input element 20 of the output unit and additionally has the length adjustment element 68.
- the transmission element 18 is formed by the eccentric disc, wherein a rotational movement of the eccentric 118 acts directly on the input member 20.
- the input connecting element 32 forms with a center of the eccentric disc and the eccentric pivot point 120, the prayerskniehebel 42nd
- Fig. 19 an alternative embodiment of the drive device 10 is shown schematically.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the transmission element 18 is formed in this embodiment as a simple lever, which is driven in a circular manner by a torque motor, and is mounted in the center 26 and in the pivot point 26 of the motor.
- the transmission element 18 has only the output connection point 28, which is connected to the output unit 16 via the output connection element 34.
- the engine is not uniformly utilized in contrast to the previously presented versions on the stroke course and must be designed for a high torque peak, so be oversized.
- Fig. 20 a further embodiment of the drive device 10 is shown schematically.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the transmission element 18 is connected via a connecting rod with a torque motor 122 to transmit the torque 38 to the transmission element 18.
- Fig. 21 are different power-path curves in relation to each other shown schematically, which is adjustable by the different settings or the different embodiments of the present invention.
- the connecting element 34 or the connecting rod 34 can be connected at the different output connecting points 28, 28 'by means of plug connections in order to steer the connecting rod 34 in different positions on the transmission element 18.
- the connection between the connecting rod 34 and the connecting element 18 in this case has on the connecting rod 34 a plug connection 130 into which a movably mounted plug element 132 can be inserted in order to connect the connecting element 18 to the connecting rod 34.
- the plug-in elements 132 each have a plurality of parallel locking pins, which engage in corresponding receptacles of the respective connectors 130. As a result, the diameter of the individual locking pins can be kept small and a favorable length-diameter ratio of the locking pins can be achieved.
- the connecting element 18 in this case has two parallel rigid plates, between which the connecting rod 34 is guided laterally and articulated by the connection between the plug-in elements 132 and the connector 130 at the different technicallyanlenkddlingen 28, 28 'and connectable to the transmission element.
- the plug-in elements 132 are each assigned a spindle wheel 134 which moves the respective plug element 132 in the axial direction and can accordingly insert into the plug connection 130 or detach from the plug connection 130.
- Spindle gear 134 translates rotational motion into axial movement to move plug members 132 accordingly.
- the spindle gear 134 and the spindle gears 134 are each rotatable by means of a drive motor 136 to move the plug elements 132 in the axial direction and into the plug connection 130 or to be released from the plug connection 130.
- the drive motor 136 is connected by means of a drive chain 138 with the respective spindle wheel 134 to the spindle wheel 134 accordingly to rotate.
- the drive motor 136 may also be connected to the respective spindle wheel 134 by means of a gear or a drive belt.
- the output connection point 28 can be selected or adjusted with little effort, it being possible for only one of the plug elements 132 to be connected to one of the plug connections 130 at a time, the others not being connected to each other a corresponding rotation of the connecting rod 34 to ensure the respective réelleanlenkddling 28.
- Fig. 22 is the pivot point 28 selected or connected, whereas the pivot point 28 'is solved.
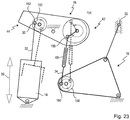
- Fig. 23 a further embodiment of the drive device 10 is shown schematically.
- the same elements are designated by the same reference numerals, in which case only the special features are explained.
- the respective articulation points are connected to the respective connecting rod 32, 34 and each mounted eccentrically on a turntable to adjust the respective articulation point or the articulation position.
- the input connecting rod 32 is articulated by means of a first hub 150 adjustable on the transmission element 18.
- the first turntable 150 is rotatably mounted on the transmission element 18 and has an eccentrically formed pivot point 152, which forms the matterssanlenkddling 30. By rotating the turntable 150, the position of the input coupling point 30 can thus be varied by fixing the rotary disk 150 in different rotational positions on the transmission element 118.
- the connecting element 34 is articulated by means of a second rotary disk 134 on the transmission element 18 or connected to the transmission element 118.
- the second hub 154 is rotatably mounted and has an eccentric pivot point 156, which forms the réelleanlenkddling 28.
- the second rotary disk 154 can be fixed to the transmission element 118 in different rotational positions, to vary the position of the mecanicanlenk Vietnameses 28 and adjust the angle 44 of the bell crank 42 accordingly.
- a third hub 158 is formed and rotatably supported on the output unit 16 and the plate of the output unit 16, a third hub 158 is formed and rotatably supported.
- the third rotary disk 158 has an eccentric connecting point 160 which forms the input member 20 or the input connecting point of the output unit 16.
- the connecting element 34 is mounted to transmit the power from the transmission element 18 to the output unit 16.
- the connecting element 34 has the adjusting device 68 for a further variation of the toggle lever 42.
- the leverage ratios of the drive device 10 can be generally adjusted with a great many possible variations and almost infinitely.
- Fig. 23 also only one or two of the illustrated rotors 150, 154, 158 may have.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transmission Devices (AREA)
- Press Drives And Press Lines (AREA)
Description
- Die vorliegende Erfindung betrifft eine Antriebsvorrichtung, insbesondere zum Antreiben einer Umformvorrichtung, mit einer Antriebseinheit, die eine Antriebskraft oder ein Antriebsmoment bereitstellt, einer Abtriebseinheit, die ein Eingangsglied und ein translatorisch bewegliches Ausgangsglied aufweist, wobei die Abtriebseinheit einen progressiven Kraft-Weg-Verlauf zwischen dem Eingangsglied und dem Ausgangsglied aufweist, und mit einem Übertragungselement, das an einem Drehpunkt drehbar gelagert ist, wobei das Übertragungselement mit der Antriebseinheit derart verbunden ist, dass ein Drehmoment auf das Übertragungselement übertragbar ist, und wobei das Übertragungselement einen Ausgangsanlenkpunkt aufweist, an dem ein Verbindungselement angelenkt ist, das mit dem Übertragungselement einen Kniehebel bildet, wobei das Verbindungselement mit dem Eingangsglied der Abtriebseinheit derart verbunden ist, dass eine Kraft auf die Abtriebseinheit übertragbar ist.
- Derartige Antriebsvorrichtungen dienen dazu an dem Ausgangsglied einen definierten Kraft-Weg-Verlauf bereitzustellen, um bspw. eine Presse oder eine Stanze anzutreiben bzw. zu betätigen.
- Für die Bearbeitung von Werkstücken sind für unterschiedliche Bearbeitungsschritte wie z.B. Tiefziehen, Prägen oder Schneiden/Stanzen für den Bewegungsablauf des Werkzeugs unterschiedliche Kraft-Weg-Kennlinien notwendig. Dabei benötigen reine Ziehvorgänge üblicherweise einen weitgehend konstanten Kraftverlauf über einen langen Hub, wohingegen Präge- oder Kalibrieroperationen eine hohe Kraftspitze mit extrem progressivem Verlauf benötigen. Schneidvorgänge erfordern demgegenüber hohe Kräfte in einem kurzen Hubbereich mit einem eher degressiven Verlauf.
- Für die unterschiedlichen Bearbeitungsarten und die unterschiedlichen Anforderungen in Bezug auf die Umformtechnik, werden üblicherweise unterschiedliche Antriebskonzepte der Pressen verwendet.
- Für Ziehvorgänge werden vorzugsweise hydraulische Antriebe verwendet, da diese für längere Hubwege einen etwa konstanten Kraftverlauf bieten. Unterschiedliche Geschwindigkeitsverläufe können bei hydraulischen Antrieben durch Regelung der Durchflussmenge gut eingestellt und ein Umschaltpunkt zwischen Eil- und Arbeitshub kann beliebig gewählt werden.
- Nachteilig bei den hydraulischen Antrieben ist die Kompressibilität des Hydrauliköls, die bei den notwendigen Systemdrücken eine Kompression im höheren einstelligen Prozentbereich liegt. Durch diese Kompressibilität entsteht eine hohe Wärmeentwicklung, die sich negativ auf die Energiebilanz des hydraulischen Verfahrens auswirkt. Ferner wird durch die Kompressibilität des Hydrauliköls die Regelung der Kraft-Weg-Verlauf des Werkzeugs beeinträchtigt, und die Krafteinwirkung erfolgt mit geringer Steifigkeit. Deshalb sind beispielsweise Kalibrierprozesse nur mit überdimensionierten Kräften möglich, da ein hartes Ausschlagen durch die Weichheit der Krafteinwirkung erschwert wird. Beim Abschluss eines Stanzvorgangs wird die durch die Kompressibilität in hohem Maße gespeicherte Federenergie schlagartig frei gesetzt. Der dadurch ausgelöste Schnittschlag erzeugt eine hohe Lärmemission.
- Mechanische Antriebssysteme in Form von Exzentern, Kurbeln und Kniegelenken weisen üblicherweise einen niedrigen Energiebedarf und eine höhere Steifigkeit auf. Die dabei konventionell mit durchlaufenden Elektromotoren ausgestatteten Antriebe erlauben jedoch nur eine eingeschränkte Variationsmöglichkeit des Prozessablaufs, wobei lediglich durch aufwändige Zusatzeinrichtungen der Arbeitshub, die Werkzeugeinbauhöhe und die Werkzeuggeschwindigkeit in geringem Umfang verändert werden kann. Darüber hinaus ist eine Regelung während des Arbeitshubs nicht möglich. Die mechanischen Antriebe weisen einen progressiven Kraft-Weg-Verlauf auf, der bei Kniehebelantrieben sehr stark ausgeprägt ist. Aus diesem Grund sind derartige Antriebe beispielsweise für Ziehvorgänge mit langen Arbeitshüben nur bedingt einsetzbar.
- Bei den mechanischen Antriebssystemen müssen zur Momentenbegrenzung der Motoren und zur Glättung der Kraftspitzen üblicherweise mechanische Schwungräder eingesetzt werden, wodurch der technische Aufwand beispielsweise durch eine schaltbare Kupplung weiter erhöht ist. Im Allgemeinen sind die Investitionskosten der konventionellen mechanischen Systeme hoch und bieten lediglich geringe Variationsmöglichkeiten in Bezug auf die Bearbeitungsarten, da sie auf einen progressiven Kraft-Weg-Verlauf beschränkt sind.
- Durch die Einführung von Servoantrieben bei der Bearbeitung von Werkstücken sind die Umformprozesse sowohl bei hydraulischen als auch bei mechanischen Antrieben über einen sehr weiten Bereich regelbar. Zur Vermeidung der Nachteile der Hydraulikantriebe werden beispielsweise regelbare Servomotoren mit Rollenspindeln verbunden, die direkt im Hauptkraftfluss eingebaut werden. Dabei ist jedoch das Antriebssystem nach der höchsten Kraftspitze auszulegen und die Hubgeschwindigkeit auf die maximal mögliche Geschwindigkeit der Spindel begrenzt, die deutlich unterhalb der Verfahrgeschwindigkeit bei einem Hydraulikzylinder liegt.
- Alternativ kann der Servomotor mit extrem hohem Drehmoment ohne Spindel oder Getriebestufe direkt mit einer Antriebswelle eines Exzenters oder Kniehebels verbunden werden. Dadurch entstehen extreme Spitzen Im Momentenverlauf und damit auch Spitzen im elektrischen Leistungsbedarf der Antriebe, wodurch aufwendige Energie-speicher nötig sind, die in Form von Kondensatoren oder separaten, elektrisch gespeisten Schwungrädern den technischen Aufwand des Gesamtsystems erhöhen. Schließlich muss das Gesamtsystem entsprechend der absoluten Momenten- bzw. Kraftspitzen ausgelegt werden, so dass der technische Aufwand deutlich höher anzusehen ist als tatsächlich technisch notwendig ist.
- Ein Antrieb für eine Presse, bei dem die Antriebswelle ohne Spindel oder Getriebestufe angetrieben wird, ist beispielsweise bekannt aus der
DE 10 2005 038 583 A1 . - Nachteilig bei den allgemein bekannten Antriebsvorrichtungen ist es, dass sie technisch aufwendig sind und/oder je nach Antriebstechnik auf einen system-bedingten Kraft-Weg-Verlauf festgelegt sind.
- Die Druckschrift
DE 20 2006 004 470 U1 zeigt eine Presshärtepresse mit einem Rahmen welcher einen Pressentisch umfasst sowie mit einem vertikal bewegbaren Stößel mittels eines Kniegelenkmechanismus an den Pressenrahmen gelagert und vertikal bewegbar ist. - Die Druckschrift
FR 2486 451 A1 - Es ist daher die Aufgabe der vorliegenden Erfindung eine Antriebsvor-richtung, insbesondere zum Antreiben einer Umformvorrichtung bereitzustellen, die flexibler für unterschiedliche Bearbeitungsvorgänge einsetzbar und kostengünstig ist, sowohl in der Herstellung als auch im betrieblichen Einsatz durch niedrigen Energieverbrauch.
- Daher wird gemäß Anspruch 1 und einem ersten Aspekt der Erfindung eine Antriebsvorrichtung bereitgestellt, mit einer Antriebsvorrichtung, insbesondere zum Antreiben einer Umformvorrichtung, mit: mindestens einer Antriebseinheit, die eine Antriebskraft oder ein Antriebsmoment bereitstellt, einer Abtriebseinheit, die ein Eingangsglied und ein translatorisch bewegliches Ausgangsglied aufweist, wobei die Abtriebseinheit einen progressiven Kraft-Weg-Verlauf zwischen dem Eingangsglied und dem Ausgangsglied aufweist, einem Übertragungselement, das an einem Drehpunkt drehbar gelagert ist, wobei das Übertragungselement mit der Antriebseinheit derart verbunden ist, dass ein Drehmoment auf das Übertragungselement übertragbar ist, und wobei das Übertragungselement einen Eingangsanlenkpunkt und einen Ausgangsanlenkpunkt aufweist, wobei an dem Ausgangsanlenkpunkt ein Verbindungselement angelenkt Ist, das mit dem Übertragungselement einen Kniehebel bildet wobei das Verbindungselement mit dem Eingangsglied der Abtriebseinheit derart verbunden ist, dass eine Kraft auf die Abtriebseinheit übertragbar ist, wobei ein Winkel des Kniehebels für eine Ausgangsposition des Ausgangsglieds wechselbar ist, um den Kraft-Weg-Verlauf des Ausgangglieds einzustellen, wobei das Übertragungselement zwei separate Übertragungsglieder aufweist, die um den Drehpunkt drehbar gelagert sind, wobei der Eingangsanlenkpunkt und der Ausgangsanlenkpunkt jeweils an einem der Übertragungsglieder ausgebildet sind, wobei die Übertragungsglieder in unterschiedlichen Verdrehwinkeln miteinander drehfest verbindbar sind.
- In einer Ausgestaltung der Antriebsvorrichtung ist ein Kraft-Weg-Verlauf des Übertragungselements gleichläufig oder gegenläufig zu dem Kraft-Weg-Verlauf der Abtriebseinheit wählbar, um den Kraft-Weg-Verlauf des Ausgangglieds einzustellen.
- Ferner wird die oben genannten Aufgabe gemäß einem zweiten Aspekt gelöst durch ein Pressenmodul für eine Umformvorrichtung mit einem translatorisch bewegbaren Stößel und mit mindestens einer Antriebsvorrichtung zum Antreiben des Stößels gemäß dem ersten Aspekt oder gemäß einer Ausführungsform der vorliegenden Erfindung.
- Die oben genannte Aufgabe wird schließlich gelöst durch ein modulares Pressensystem zum Bearbeiten von Werkstücken mit einer Mehrzahl von Pressenmodulen gemäß dem zweiten Aspekt der vorliegenden Erfindung.
- Dadurch, dass bei dem ersten Aspekt der vorliegenden Erfindung der Winkel des Kniehebels einstellbar ist, der mit dem Ausgangsglied verbunden ist, welches einen progressiven Kraft-Weg-Verlauf aufweist, ist der Kraft-Weg-Verlauf des Übertragungselements variabel einstellbar, so dass am Ausgangsglied unterschiedliche Kraft-Weg-Verläufe bereitgestellt werden können. Dies wird dadurch erzielt, dass bei unter-schiedlichen Winkeln des Kniehebels unterschiedliche Hebelwirkungen und dadurch unterschiedliche Kraftübertragungen des Kniehebels eingestellt werden können. Durch die Kombination des Übertragungselements mit der Abtriebseinheit werden die Kraft-Weg-Verläufe der beiden Elemente überlagert, wodurch ein nahezu beliebiger Kraft-Weg-Verlauf am Ausgangsglied eingestellt werden kann.
- Da bei einer Ausgestaltung der vorliegenden Erfindung der Kraft-Weg-Verlauf des Übertragungselements gleichläufig oder gegenläufig zu dem Kraft-Weg-Verlauf der Abtriebseinheit wählbar ist, kann durch die Addition der Kraft-Weg-Verläufe des Übertragungsefements und der Abtriebseinheit ein nahezu beliebiger Kraft-Weg-Verlauf des Ausgangsglieds eingestellt werden.
- Es ist vorgesehen, dass das Übertragungselement zwei separate Übertragungsglieder aufweist, die um den Drehpunkt drehbar gelagert ist, wobei der Eingangsanlenkpunkt und der Ausgangsanlenkpunkt jeweils an einem der Übertragungsglieder ausgebildet sind, wobei die Übertragungsglieder in unterschiedlichen Verdrehwinkeln miteinander drehfest verbindbar sind.
- Des Weiteren kann der Winkel des zweiten Kniehebels mit wenig Aufwand eingestellt werden, da die beiden Übertragungsglieder einfach relativ zueinander verdreht und in unterschiedlichen Verdrehwinkeln miteinander verbindbar sind. Dadurch wird die Handhabung des Übertragungselements im Allgemeinen und die Einstellung des Winkels des Kniehebels einfacher.
- Insgesamt ist die Antriebsvorrichtung gemäß dem ersten Aspekt somit für unterschiedliche Bearbeitungs- bzw. Umformschritte verwendbar, wodurch die Antriebsvorrichtung flexibel einsetzbar ist. Demnach wird die Aufgabe der Erfindung vollständig gelöst.
- In einer bevorzugten Ausführungsform ist der Ausgangsanlenkpunkt des Verbindungselements mit dem Eingangsglied des Abtriebs verbunden und eine Länge des Verbindungselements bzw. ein Abstand zwischen dem Ausgangslenkpunkt und dem Eingangsglied einstellbar.
- Dadurch lässt sich der Winkel des Kniehebels und somit ein Hebel des Kniehebels Uber den Arbeitshub mit geringem Aufwand einstellen, wodurch der Kraft-Weg-Verlauf des Übertragungselements mit geringem Aufwand einstellbar ist.
- Es ist weiterhin bevorzugt, wenn der Drehpunkt des Übertragungselements relativ zu der Abtriebseinheit versetzbar ausgebildet ist.
- Dadurch lässt sich der Winkel des Kniehebels verändern und somit ein Hebel des Übertragungsgliedes Uber den Arbeitshub einstellen, wobei gleichzeitig das Übertragungsglied und das Verbindungselement technisch weniger aufwendig gefertigt werden können.
- Es ist weiterhin bevorzugt, wenn eine Winkelposition des Ausgangsanlenkpunkts für die Ausgangsposition des Ausgangsglieds wechselbar ausgebildet ist.
- Dadurch lässt sich alternativ der Winkel des Kniehebels einstellen, wodurch unterschiedliche Kraft-Weg-Verläufe des Übertragungselements einstellbar sind.
- Es ist weiterhin bevorzugt, wenn der Ausgangsanlenkpunkt an einer Exzenterdrehscheibe an dem Übertragungselement gelagert ist, um den Winkel des Kniehebels einzustellen. Dabei ist die Exzenterdrehscheibe vorzugsweise in unterschiedlichen Drehpositionen an dem Übertragungselement festlegbar.
- Dadurch lässt sich der Winkel mit einem hohen Freiheitsgrad und mit geringem Aufwand einstellen.
- Es ist weiterhin bevorzugt, wenn der Eingangsanlenkpunkt an einer Exzenterscheibe an dem Übertragungselement gelagert ist, um den zweiten Kniehebe! einzustellen. Dabei ist die Exzenterdrehscheibe vorzugsweise in unterschiedlichen Drehpositionen an dem Übertragungselement festlegbar, um den Winkel des zweiten Kniehebels einzustellen.
- Dadurch kann der Winkel des zweiten Kniehebels stufenlos eingestellt werden, wodurch die Variation des Kraftwegverlaufs des Ausgangsglieds flexibler und mit geringem Aufwand einstellbar ist.
- Es ist weiterhin bevorzugt, wenn das Verbindungselement an der Abtriebseinheit mittels einer Exzenterdrehscheibe gelagert ist, um den Winkel des Knie-hebels einzustellen. Dabei ist die Exzenterdrehscheibe vorzugsweise in unterschiedlichen Rotationspositionen an der Abtriebseinheit festlegbar, um die unterschiedlichen Lagerpositionen zu realisieren.
- Dadurch kann der Winkel des Kniehebels mit geringem Aufwand eingestellt werden, wodurch die Flexibilität bei der Einstellung des Kraftwegverlaufes des Ausgangsglieds weiter erhöht werden kann.
- In einer besonderen Ausführungsform ist der Ausgangsanlenkpunkt des Übertragungselements, der Eingangsanlenkpunkt des Übertragungselements und das Verbindungselement an der Abtriebseinheit jeweils mittels einer Exzenterdrehscheibe gelagert, so dass eine vielseitig variable Einstellung des Kraftwegverlaufes der Antriebsvorrichtung im Allgemeinen bereitgestellt werden kann.
- Es ist weiterhin bevorzugt, wenn an dem Übertragungselement ein Eingangsanlenkpunkt ausgebildet ist, an dem ein Eingangsverbindungselement angelenkt ist, das mit dem Übertragungselement einen zweiten Kniehebel bildet.
- Dadurch lässt sich mit technisch geringem Aufwand ein großes Drehmoment auf das Übertragungselement übertragen.
- Es ist weiterhin bevorzugt, wenn ein Winkel zwischen dem Eingangsanienkpunkt und dem Ausgangsanlenkpunkt wechselbar oder einsteilbar ausgebildet ist.
- Dadurch lassen sich weitere Kraft-Weg-Verläufe des Übertragungsglieds einstellen, wodurch insgesamt die Variabilität des Kraft-Weg-Verlaufs des Ausgangsglieds erhöht wird.
- Es ist weiterhin bevorzugt, wenn an dem Übertragungselement eine Linearverstelleinrichtung ausgebildet ist, an der der Eingangsanlenkpunkt gelagert ist. Dadurch lässt sich der Hebel des zweiten Kniehebels einfach einstellen, wodurch der Kraft-Weg-Verlauf der Antriebsvorrichtung weiter variiert werden kann.
- Es ist weiterhin bevorzugt, wenn die Antriebseinheit ein Antriebsmoment bereitstellt, wobei die Antriebseinheit direkt oder mittels einer Pleuelstange mit dem Übertragungselement verbunden ist.
- Dadurch kann das Drehmoment auf das Übertragungselement mit geringem mechanischen Aufwand übertragen werden, wodurch gleichzeitig eine besonders kompakte Bauform möglich ist.
- Es ist weiterhin bevorzugt, wenn die Antriebseinheit einen Exzenterantrieb aufweist.
- Dadurch lässt sich die Antriebsvorrichtung mittels eines durchlaufenden Elektromotors antreiben.
- Es ist alternativ bevorzugt, wenn die Antriebseinheit einen Spindelantrieb aufweist.
- Dadurch lässt sich präzise eine große Kraft auf das Übertragungselement übertragen.
- Es ist weiterhin bevorzugt, wenn die Antriebseinheit mit dem Eingangsanlenkpunkt mittels einer Verbindungseinheit verbunden ist, die wenigstens eine Pleuelstange aufweist.
- Dadurch lässt sich mit technisch geringem Aufwand die Kraft von der Antriebseinheit auf das Übertragungselement übertragen, wobei sich gleichzeitig mit technisch geringem Aufwand der zweite Kniehebel realisieren lässt.
- Es ist weiterhin bevorzugt, wenn die Verbindungseinheit einen Hebel aufweist, der mit dem Eingangsanlenkpunkt verbunden ist.
- Dadurch kann mit technisch geringem Aufwand eine präzise Kraft auf das Übertragungselement ausgeübt werden.
- Es ist weiterhin bevorzugt, wenn der Hebelarm des Hebels einstellbar ausgebildet ist.
- Dadurch lässt sich mit technisch geringem Aufwand die von dem Ausgangsglied bereitgestellte Maximal-Kraft einstellen.
- Es ist weiterhin bevorzugt, wenn der Hebel als einseitiger Hebel ausgebildet ist.
- Dadurch kann der Hebelarm und somit die Kraftübertragung variiert werden, ohne dass die Bewegungsrichtung des Eingangsanlenkpunkts verändert wird.
- Es ist alternativ bevorzugt, wenn der Hebel als zweiseitiger Hebel ausgebildet ist.
- Dadurch kann die Bewegungsrichtung des Eingangsanlenkpunkts und somit des Ausgangsgliedes verändert werden.
- Es ist weiterhin bevorzugt, wenn der Hebel als Dreieckshebel ausgebildet ist, der zwei Anlenkpunkte und einen Lagerpunkt aufweist, die zusammen ein Dreieck aufspannen.
- Dadurch lässt sich mit technisch einfachen Mitteln das Verhältnis der Kraft des Antriebs zur Krafteinleitung in den Eingangsanlenkpunkt während des Hubs variieren, wodurch der Kraft-Weg-Verlauf zusätzlich variabel einstellbar, insbesondere geglättet wird.
- Es ist weiterhin bevorzugt, wenn die Verbindungseinheit ein zweites drehbar gelagertes Übertragungselement mit zwei Anlenkpunkten aufweist, wobei ein Winkel zwischen den Anlenkpunkten wechselbar ist.
- Dadurch kann der Kraft-Weg-Verlauf des Ausgangsgliedes noch präziser eingestellt werden.
- Es ist weiterhin bevorzugt, wenn die Abtriebseinheit ein Kniegelenk aufweist.
- Dadurch lässt sich mit technisch geringem Aufwand eine präzise und direkte Kraftübertragung auf das Ausgangsglied realisieren.
- Es ist alternativ bevorzugt, wenn die Abtriebseinheit durch einen Exzenter gebildet ist.
- Dadurch lässt sich mit technisch einfachen Mitteln in kompakter Bauform die Abtriebseinheit realisieren.
- Insgesamt lassen sich durch die unterschiedlichen Variationen der Antriebsvorrichtung verschiedene Kraft-Weg-Verläufe des Ausgangsgliedes einstellen, wodurch insgesamt die Variabilität der Antriebsvorrichtung für unterschiedliche Arbeitsschritte, insbesondere zum Umformen von Werkstücken, einsetzbar ist. Dabei lassen sich unterschiedliche große Kräfte konstant oder linear ansteigend über den Arbeitshub oder aber progressiv, das heißt mit einem exponentiellen Kraftverlauf über den Arbeitshub einstellen. Die von der Antriebseinheit bereitzustellende Kraft bzw. das Drehmoment bleibt trotz der unterschiedlichen Kennlinien über den gesamten Hubverlauf konstant, Leistungsspitzen treten nicht auf. Dadurch, dass die unterschiedlichen Kraft-Weg-Verläufe lediglich durch mechanische Einstellung der Antriebsvorrichtung einstellbar sind, sind die Varianten mit vergleichsweise kleinen und energieeffizienten Antriebseinheiten realisierbar, wobei gleichzeitig die Vorteile des mechanischen Antriebs und der mechanischen Kraftübertragung, in Bezug auf eine direkte Kraftwirkung mit hoher Steifigkeit und sparsamen Energieeinsatz, genutzt werden können.
- Somit kann eine Antriebsvorrichtung für unterschiedliche Bearbeitungsverfahren verwendet werden, wobei die Vorteile der unterschiedlichen Kraftübertragungen ausgenutzt wurden.
- Es versteht sich, dass die vorstehend genannten und die nachstehend noch zu erläuternden Merkmale nicht nur in der jeweils angegebenen Kombination, sondern auch in anderen Kombinationen oder in Alleinstellung verwendbar sind, ohne den Rahmen der vorliegenden Erfindung zu verlassen.
- Ausführungsbeispiele der Erfindung sind in der Zeichnung dargestellt und werden in der nachfolgenden Beschreibung näher erläutert. Es zeigen:
- Fig. 1
- eine schematische Darstellung einer Antriebsvorrichtung zum Antreiben einer Umformvorrichtung;
- Fig. 2a bis d
- eine schematische Darstellung einer Ausführungsform der Antriebsvorrichtung in unterschiedlichen Positionen und einem entsprechenden progressiven Kraft-Weg-Verlauf;
- Fig. 3a bis d
- die Ausführungsform der Antriebsvorrichtung aus
Fig. 2a bis d mit alternativem Übertragungselement und eine zugehörige flache Kraft-Weg-Kennlinie; - Fig. 4a bis d
- eine weitere Ausführungsform der Antriebsvorrichtung mit versetzbarem Übertragungselement und verschiedenen Eingangsanlenkpunkten und zugehörige Kraft-Weg-Kennlinien;
- Fig. 5a bis d
- eine weitere Ausführungsform der Antriebsvorrichtung mit Dreieckshebel und zugehörige Kraft-Weg-Kennlinien;
- Fig. 6a bis d
- eine weitere Ausführungsform der Antriebsvorrichtung mit variablem Eingangshebel und zugehörige Kraft-Weg-Kennlinien;
- Fig. 7a bis d
- eine Einstellung der Antriebsvorrichtung aus
Fig. 6a bis c mit verkürztem Hub zugunsten hoher Kraft und eine zugehörige Kraft-Weg-Kennlinie; - Fig. 8
- eine besondere Ausführungsform der Antriebsvorrichtung mit längenverstellbarer Ausgangspleuelstange;
- Fig. 9
- eine Ausführungsform der Antriebsvorrichtung mit zweiseitigem Eingangshebel mit variablem Hebelarm und festem Widerlager sowie zwei separaten scheibenförmigen Übertragungsgliedern;
- Fig. 10
- eine Ausführungsform der Antriebsvorrichtung mit zweiseitigem Eingangshebel und variablem Widerlager;
- Fig. 11
- eine Ausführungsform der Antriebsvorrichtung mit zweiseitigem Eingangshebel mit variablem Hebelarm und festem Widerlager;
- Fig. 12
- eine Ausführungsform der Antriebsvorrichtung mit einem Dreieckshebel als Eingangshebel und oberem Lagerpunkt;
- Fig. 13
- eine Ausführungsform der Antriebsvorrichtung mit Dreieckshebel und unterem Lagerpunkt;
- Fig. 14a, b
- eine detaillierte Darstellung einer konstruktiven Ausführungsform der Antriebsvorrichtung mit stufenloser Verstellung in der Einstellung eines progressiven Kraft-Weg-Verlaufs;
- Fig. 15a, b
- eine detaillierte Darstellung der Antriebsvorrichtung aus
Fig. 14a , b; in der Einstellung eines konstanten Kraft-Weg-Verlaufs; - Fig. 16a bis g
- Ausführungsformen der Antriebsvorrichtung mit zwei drehbar gelagerten Übertragungselementen bzw. mit einer Scheibe als Eingangsglied der Abtriebseinheit;
- Fig. 17
- eine Ausführungsform der Antriebsvorrichtung mit einem Exzenter als Abtriebseinheit;
- Fig. 18
- eine Ausführungsform der Antriebsvorrichtung mit Exzenter als Antriebseinheit;
- Fig. 19
- eine Ausführungsform der Antriebsvorrichtung mit direktem Momentantrieb;
- Fig. 20
- eine Ausführungsform der Antriebsvorrichtung mit einem Momentenmotor, der über eine Pleuelstange mit der Übertragungseinheit verbunden ist;
- Fig. 21
- Kraft-Weg-Verläufe von unterschiedlichen Einstellungen der Antriebsvorrichtung;
- Fig. 22
- eine detaillierte Darstellung des einstellbaren Übertragungselements aus
Figur 16f und g; und - Figur 23
- eine Ausführungsform der Antriebsvorrichtung mit exzentrisch drehbar gelagerten Anlenkpunkten.
- In
Fig. 1 ist eine Antriebsvorrichtung schematisch dargestellt und allgemein mit 10 bezeichnet. Die Antriebsvorrichtung 10 dient dazu, eine Umformvorrichtung 12 anzutreiben. Zusammen bilden die Antriebsvorrichtung 10 und die Umformvorrichtung 12 ein Modul, insbesondere ein Pressenmodul. - Die Antriebsvorrichtung 10 weist eine Antriebseinheit 14 und eine Abtriebseinheit 16 auf. Die Antriebseinheit 14 ist über ein Übertragungselement 18 mit der Abtriebseinheit 16 verbunden. Die Abtriebseinheit 16 ist in dieser Ausführungsform als Kniehebel ausgebildet, der allgemein über ein Eingangsglied 20 mit dem Übertragungselement 18 mechanisch verbunden ist. Die Abtriebseinheit 16 weist ferner allgemein ein Ausgangsglied 22 auf, das linear bzw. translatorisch bewegbar ist und in der hier schematisch dargestellten Anwendung mit einem Stößel 24 verbunden ist, der ein Unterteil eines Werkzeugs 24 in der Umformvorrichtung 12 trägt.
- Das Übertragungselement 18 ist um einen Drehpunkt 26 drehbar gelagert. Das Übertragungselement 18 weist einen ersten Anlenkpunkt 28 auf, der einen Ausgangsanlenkpunkt 28 des Übertragungselements 18 bildet. Das Übertragungselement 18 weist ferner einen zweiten Anlenkpunkt 30 auf, der einen Eingangsanlenkpunkt 30 des Übertragungselements 18 bildet. Der Eingangsanlenkpunkt 30 ist über ein Eingangsverbindungselement 32 mit der Antriebseinheit 14 verbunden. Der Ausgangsanlenkpunkt 28 ist über ein Ausgangsverbindungselement 34 mit der Abtriebseinheit 16 bzw. mit dem Eingangsglied 20 der Abtriebseinheit 16 verbunden.
- Die Antriebseinheit 14 ist als Spindelantrieb 14 ausgebildet und überträgt über das Eingangsverbindungselement 32, das in dieser besonderen Ausführungsform als Pleuelstange ausgebildet ist, eine Kraft auf den Eingangsanlenkpunkt 30, wobei die Kraft in
Fig. 1 schematisch durch einen Pfeil 36 dargestellt ist. Alternativ kann der Eingangsanlenkpunkt 30 auch direkt mit der Spindel des Spindelantriebs 14 verbunden sein. Dadurch wird ein Drehmoment auf das drehbar gelagerte Übertragungselement 18 übertragen, wobei das Drehmoment schematisch durch einen Pfeil 38 dargestellt ist. Das Drehmoment 38 wird über das Ausgangsverbindungselement 34 auf das Eingangsglied 20 übertragen, so dass eine entsprechende Kraft auf das Ausgangsglied 22 übertragen wird, um den Stößel 24 zu bewegen, wie es durch einen Pfeil 40 schematisch dargestellt ist. Die Abtriebseinheit 16 ist in dieser Ausführungsform als Kniehebel ausgebildet und weist einen progressiven Kraft-Weg-Verlauf zwischen dem Eingangsglied 20 und dem Ausgangsglied 22 auf. Mit anderen Worten nimmt die auf den Stössel 24 ausgeübte Kraft mit zunehmendem Arbeitshub zu. Dies ist bedingt durch die besondere Hebelwirkung des Kniehebels 16. Alternativ kann die Antriebseinheit 14 auch ein servogeregelter Hydraulikzylinder sein. - Das Ausgangsverbindungselement 34, das an dem Ausgangsanlenkpunkt 28 angelenkt ist, bildet zusammen mit dem an dem Drehpunkt 26 drehbar gelagerten Übertragungselement 18 einen Ausgangskniehebel 42, der einen charakteristischen Kraft-Weg-Verlauf aufweist. Der Kraft-Weg-Verlauf ist über einen Winkel 44 des Kniehebels 42 des Ausgangsanlenkpunkts 28 einstellbar. Der Winkel 44 ist für eine bestimmte Ausgangsposition des Ausgangsglieds 22 bzw. für eine vordefinierte Position des Ausgangsglieds 22 einstellbar bzw. wechselbar, so dass ein Arbeitshub der Antriebsvorrichtung 10 bei den unterschiedlichen Einstellungen mit unterschiedlichen Werten des Winkels 44 beginnt. Dadurch lassen sich Kraft-Weg-Verläufe des Übertragungselements 18 einstellen, die gleichläufig oder gegenläufig zu dem Kraft-Weg-Verlauf der Abtriebseinheit 16 verlaufen, so dass im Ergebnis unterschiedliche Kraft-Weg-Verläufe des Ausgangsglieds 22 einstellbar sind.
- Das Eingangsverbindungselement 32, das an dem Eingangsanlenkpunkt 30 angelenkt ist, bildet zusammen mit dem Übertragungselement 18 einen Eingangskniehebel 46. Der Eingangskniehebel 46 weist einen Winkel 48 auf, der zwischen dem Eingangsverbindungselement 32 und dem Drehpunkt 26 an dem Eingangsanlenkpunkt 30 gebildet ist.
- Sofern der Winkel 44 auf einen kleinen Wert in einer Ausgangsposition des Ausgangsglieds 22 eingestellt wird, beginnt der Arbeitshub des Verbindungselements 34 mit einer großen Kraft (umgekehrter Kniehebel), die über den Arbeitshub abfällt und bei einem Winkel 44 von ca. 90° mit einem geringen Wert endet. Durch diesen degressiven Kraft-Weg-Verlauf entsteht in der Summe mit dem progressiven Verlauf des Kniehebels 16 ein Kraft-Weg-Verlauf des Ausgangsglieds 22, der wannenförmig, konkav, verläuft, mit höheren Kräften am Anfang und am Ende und einem Tiefpunkt im mittleren Bereich. Durch entsprechende Einstellung des Winkels 48 im Krafteingangsbereich des Übertragungselements 18, nämlich 90 ° bei ca. halbem Hub, wirkt auf das Übertragungselement ein größtes Moment im mittleren Bereich, wohingegen es am Anfang und am Ende des Hubs ein Minimum erreicht. Durch die Überlagerung dieses konvexen Momentenverlaufs mit dem vorstehend geschilderten konkaven Verlauf der nachfolgenden kombinierten Elemente wird der Kraft-Weg-Verlauf des Ausgangsglieds 22 stark geglättet und kommt über einen weiten Hubbereich einem konstanten Verlauf relativ nahe. Ausnahmen bilden die extremen Stellungen, insbesondere das Hubende, da bei gestreckter Lage die Kraft des Kniehebels gegen unendlich geht. Gegebenenfalls sollte deshalb der Hub vorher beendet werden. Wird hingegen der Winkel 44 auf einen Wert von ca. 90° in einer Ausgangsposition des Ausgangsglieds 22 eingestellt, beginnt der Arbeitshub des Verbindungselements 34 mit einer kleinen Kraft, die über den Arbeitshub zunimmt und bei einem Winkel 44 von nahe 180° mit einem Maximum endet. Dieser progressive Verlauf verstärkt den ebenfalls progressiven Verlauf des Ausgangsglieds 22. Dadurch entsteht im Ergebnis ein stark progressiver, am Ende des Arbeitshubs extrem ansteigender Kraft-Weg-Verlauf des Ausgangsglieds 22, wie es im Folgenden näher erläutert ist. Dieser Verlauf kann durch eine Variation des Winkels 48 wiederum zusätzlich beeinflusst, nämlich nochmals verstärkt oder abgeschwächt werden.
- Im Ergebnis kann somit der Kraft-Weg-Verlauf des Ausgangsglieds 22 in Abhängigkeit des Winkels 44 für eine Ausgangsposition des Ausgangsglieds 22 verschiedenartig eingestellt werden, wodurch die Antriebsvorrichtung 10 für unterschiedliche Arbeitsschritte einsetzbar ist. Durch Kombination mit dem variabel einstellbaren zusätzlichen Winkel 48 ist der Kraft-Weg-Verlauf des Ausgangsglieds 22 fast beliebig einstellbar.
- In
Fig. 2a bis c ist eine Ausführungsform der Antriebsvorrichtung 10 für unterschiedliche Positionen des Arbeitshubs S schematisch dargestellt und wobei inFig. 2d der resultierende Kraft-Weg-Verlauf dieser Ausführungsform dargestellt ist. Bei der Ausführungsform ausFig. 2a bis c ist das Übertragungselement 18 als starrer, einstückiger Dreieckshebel ausgebildet, bei dem der Winkel 44 in einer Ausgangsposition des Ausgangsgliedes 22 etwa 90° aufweist. Der Winkel 48 des Eingangskniehebels 46 ist in der Ausgangsposition etwa 45°. Der Eingangsanlenkpunkt 30, der Ausgangsanlenkpunkt 28 und der Drehpunkt 26 spannen einen Winkel von etwa 100° auf. - Die drei unterschiedlichen Positionen des Arbeitshubs S sind in den Figuren 2a bis c dargestellt und die unterschiedlichen Positionen der
Figuren 2a bis c sind in dem Diagramm inFig. 2d entsprechend mit S1, S2 und S3 gekennzeichnet. - Durch die besondere Hebelwirkung des Eingangsanlenkpunkts 30 und des Ausgangsanlenkpunkts 28 in den drei Positionen des Arbeitshubs S aus
Fig. 2a bis c , ergibt sich ein stark progressiver bzw. ansteigender Kraft-Weg-Verlauf des Ausgangsglieds 22, der inFig. 2d dargestellt ist. InFig. 2d sind die einzelnen Positionen des Arbeitshubs, die in denFiguren 2a bis c dargestellt sind, entsprechend mit S1, S2 und S3 gekennzeichnet. Daraus ergibt sich, dass sich die Kraft, die durch aus Ausgangsglied 22 übertragen wird, für den Arbeitshub S1 und S2 aus denFiguren 2a und b nur geringfügig unterscheidet, da die Hebelwirkung in den beiden Drehpositionen des Übertragungselements 18 sich lediglich geringfügig ändert, wohingegen die Kraft für den Arbeitshub S3, der der Position ausFig. 2c entspricht, deutlich größer ist, da hier der Hebel des Eingangskniehebels 46 besonders günstig ist und der Hebel des Ausgangskniehebels 42 besonders flach gestreckt ist. -
Figuren 3a bis c zeigen die Antriebsvorrichtung 10 in drei unterschiedlichen Positionen des Arbeitshubs S undFig. 3d zeigt einen zugehörigen Kraft-Weg-Verlauf für die drei Positionen des Arbeitshubs S. Die Antriebsvorrichtung 10 entspricht der Antriebsvorrichtung aus denFiguren 2a bis c , wobei das Übertragungselement 18 mit geänderten Winkeln 44, 48 des Ausgangskniehebels 42 und des Eingangskniehebels 46 ausgebildet ist. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Das Übertragungselement 18 ist in dieser Ausführungsform als einstückiges starres Element ausgebildet, bei dem der Eingangsanlenkpunkt 30, der Ausgangsanlenkpunkt 28 und der Drehpunkt 26 einen Winkel von etwa 190° aufspannen. In der in
Fig. 3a dargestellten Ausgangsposition des Arbeitshubs, der mit S1 bezeichnet ist, ist der Winkel 44 des Ausgangskniehebels 42 sehr klein und der Winkel 48 des Eingangskniehebel 46 etwa 90°. Dadurch wird in dieser Position des Arbeitshubs S1 von dem Übertragungselement 18 eine große Kraft übertragen. In der Position des Arbeitshubs, die inFig. 3b dargestellt ist und mit S2 bezeichnet ist, sind der Winkel 44 und der Winkel 48 im Zwischenbereich, so dass von dem Übertragungselement 18 eine mittlere Kraft übertragen wird und in der Position des Arbeitshubs, die inFig. 3c dargestellt ist und mit S3 bezeichnet ist, ist der Winkel 44 bei 90° und der Winkel 48 sehr groß, wodurch der resultierende Hebelarm des Antriebs 14 zum Drehpunkt 26 also sehr klein ist, so dass eine geringe Kraft von dem Übertragungselement 18 übertragen wird. Dieser Kraft-Weg-Verlauf des in denFiguren 3a bis c dargestellten Übertragungselements 18 ist in etwa gegenläufig zu dem progressiven Kraft-Weg-Verlauf der Abtriebseinheit 16 ausgebildet, so dass sich in der Summe über eine weite Strecke ein etwa linearer Kraft-Weg-Verlauf des Ausgangsglieds 22 ergibt. Dieser Kraft-Weg-Verlauf ist für die drei Positionen des Arbeitshubs S1, S2, S3 inFig. 3d dargestellt. - Die in den
Figuren 2a bis c und3a bis c dargestellte Übertragungselemente 18 sind als starre einstückige Elemente mit einem festen Winkel zwischen dem Eingangsanlenkpunkt 30 und dem Ausgangsanlenkpunkt 28 ausgebildet, so dass ein Wechsel des Winkels 44 des Ausgangskniehebels 42 lediglich durch Austausch des Übertragungselements 18 erfolgen kann. - In
Fig. 4a bis c ist eine alternative Ausführungsform des Übertragungselements 18 in unterschiedlichen Einbaupositionen und in unterschiedlichen Positionen des Arbeitshubs S dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Das Übertragungselement 18 ist als starres Element ausgebildet und weist in dieser Ausführungsform eine Halbkreisscheibenform auf. Das Übertragungselement 18 weist vier Anschlusspositionen auf, die als runde Ausnehmungen ausgebildet sind. Die Anschlusspositionen dienen dazu, das Eingangsverbindungselement 32 in unterschiedlichen Positionen mit dem Übertragungselement 18 zu verbinden bzw. an den unterschiedlichen Positionen anzulenken, um unterschiedliche Winkel des Ausgangskniehebels 42 oder des Eingangskniehebels 46 zu realisieren. Eine der Anschlusspositionen dient dazu, das Übertragungselement 18 an unterschiedlichen Positionen drehbar zu lagern und entsprechend den Drehpunkt 26 zu bilden.
- In den
Figuren 4a bis c sind jeweils zwei unterschiedliche Anschluss- bzw. Lagermöglichkeiten des Übertragungselements 18 dargestellt, wobei eine erste Anschlussvariante mit durchgezogenen Linien dargestellt ist und eine zweite Anschlussvariante mit gestrichelten Linien dargestellt ist. - In der ersten Anschlussvariante sind der Eingangsanlenkpunkt 30 und der Ausgangsanlenkpunkt 28 relativ zu dem Drehpunkt 26 in einem Winkel von etwa 190° zueinander angeordnet, so dass in der in
Fig. 4a dargestellten Ausgangsposition des Arbeitshubs S1 der Winkel 44 des Ausgangskniehebels 42 etwa 90° beträgt und der Winkel 48 des Eingangskniehebels 46 einen stumpfen Winkel von etwa 120° aufweist. - In der zweiten (gestrichelt dargestellten) Anschlussvariante ist das Übertragungselement 18 nach rechts zu dem Abtriebseinheit 16 hin versetzt an dem Drehpunkt 26' drehbar gelagert, wobei der Eingangsanlenkpunkt 30' gegenüber der ersten Anschlussvariante um etwa 90° versetzt ist, so dass in der in
Fig. 4a dargestellten Ausgangsposition des Arbeitshubs S1 der Winkel 44' des Ausgangskniehebels 42' ein spitzer Winkel von etwa 30° ist und der Winkel 48' des Eingangskniehebels 46 etwa 90°. - In
Fig. 4d sind zwei Kraft-Weg-Verläufe für die beiden Einbauvarianten des Übertragungselements 18 entsprechend mit einer durchgezogenen und einer gestrichelten Linie dargestellt. Durch die besondere Einstellung der Winkel 44, 48 über die in denFiguren 4a bis c dargestellten Arbeitshubpositionen S1, S2, S3, weist das Übertragungselement 18 in der ersten Einbauvariante einen progressiven Kraft-Weg-Verlauf auf, so dass im Ergebnis der Gesamt-Kraft-Weg-Verlauf des Ausgangsglieds 22, der inFig. 4d dargestellt ist, einen progressiven Verlauf aufweist. Im Gegensatz dazu weist in der zweiten Einbauvariante das Übertragungselement 18 einen Kraft-Weg-Verlauf auf, der zu dem progressiven Kraft-Weg-Verlauf der Abtriebseinheit 16 gegenläufig ist bzw. mit anderen Worten in der Position S1 eine große Kraftübertragung, in der Position S2 eine mittlere Kraftübertragung, in der Position S3 eine geringe Kraftübertragung ermöglicht, so dass im Ergebnis der Gesamt-Kraft-Weg-Verlauf des Ausgangsglieds 22 über den Arbeitshub zwischen S1 und S3 im Wesentlichen konstant verläuft, wie es inFig. 4d dargestellt ist. - Durch die besondere Ausführungsform des in den
Figuren 4a bis c dargestellten Übertragungselements 18 mit den unterschiedlichen Anschlusspositionen für den Anlenkpunkt 30 bzw. den Drehpunkt 26, kann das Übertragungselement 18 so eingebaut bzw. angeschlossen werden, dass unterschiedliche Kraft-Weg-Verläufe des Ausgangsglieds 22 einstellbar sind. - In den
Figuren 5a bis c ist eine Variante der Antriebsvorrichtung 10 aus denFiguren 4a bis c mit einem zusätzlichen Zwischenhebel, der zwischen der Antriebseinheit 14 und dem Eingangsanlenkpunkt 30 geschaltet ist, schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - In den
Figuren 5a bis c ist eine erste Variante mit durchgezogenen Linien dargestellt, bei der die Antriebseinheit 14 mit einem einseitigen Dreieckshebel 50 verbunden ist, um die eingeleitete Kraft 36 auf den Eingangsanlenkpunkt 30 zu übertragen. Der Dreieckshebel 50 ist als einseitiger Hebel ausgebildet und weist einen Lagerpunkt 52 und zwei Anlenkpunkte 54, 56 für eine Pleuelstange der Antriebseinheit 14 bzw. für eine Abtriebspleuelstange zum Verbinden mit dem Übertragungselement 18 auf. - In den Fi
guren 5a bis c ist eine zweite Anschlussvariante ohne den Dreieckshebel 50 mit gestrichelten Linien dargestellt, die im Wesentlichen der zweiten Anschlussvariante aus denFiguren 4a bis c entspricht. - Durch den Dreieckshebel 50 wird die Eingangskraft 36 in ihrer Wirkung auf den Eingangsanlenkpunkt 30 zusätzlich zur Variation des Krafteinwirkungswinkels 48 noch verändert durch das in Bezug auf den Hebeldrehpunkt 52 unterschiedliche Verhältnis der resultierenden Hebelarme der Kraftrichtung 36 und des Verbindungspleuels zwischen den Anlenkpunkten 56 und 30. In der Arbeitshubposition S1 ist der Hebelarm der Antriebskraft 36 in Bezug auf den Hebeldrehpunkt 52 größer als der resultierende Hebelarm des Verbindungspleuels. Dadurch wird die Eingangskraft 36 in ihrer Wirkung auf den Eingangsanlenkpunkt 30 verstärkt. In der Arbeitshubposition S3 ist das Verhältnis umgekehrt, die Eingangskraft 36 wird also in ihrer Wirkung reduziert. In der Arbeitshubposition S2 ist das Verhältnis ausgeglichen. Dadurch wird in der Gesamtsummierung die Kraft in der Abtriebseinheit 16 in der ersten Hälfte des Arbeitshubs erhöht, in der zweiten Hälfte reduziert gegenüber der Ausführung ohne den Dreieckshebel 50. Somit ergibt sich über einen großen Bereich des Arbeitshubs ein konstanter Kraft-Weg-Verlauf, wie er in
Fig. 5d mit einer durchgezogenen Linie dargestellt ist. Im Vergleich dazu weist die Anschlussvariante ohne den Dreieckshebel 50 einen über denselben Arbeitshub linear ansteigenden Kraft-Weg-Verlauf auf, wie es ebenfalls (als gestrichelte Linie) inFig. 5d dargestellt ist. - In den
Figuren 6a bis c ist eine weitere Variante der Antriebsvorrichtung 10 schematisch dargestellt. Die Antriebseinheit 14 ist dabei über einen variablen einseitigen Hebel 60 mit dem Eingangsanlenkpunkt 30 des Übertragungselements 18 verbunden. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - In den
Figuren 6a bis c sind zwei Anschlussvarianten des einseitigen Hebels 60 dargestellt, wobei eine Variante mit kleinem Hebel mit durchgezogenen Linien dargestellt ist und eine zweite Anschlussvariante mit großem Hebel mit gestrichelten Linien dargestellt ist. - Der einseitige Hebel 60 ist an einem Lagerpunkt 62 einseitig gelagert und weist einen Ausgangsanlenkpunkt 64 auf, der einen festen Hebelweg zu dem Lagerpunkt 62 bildet und weist ferner einen Eingangsanlenkpunkt 66 auf, der mit der Antriebseinheit 14 verbunden ist, wobei der Eingangsanlenkpunkt 66 variabel bzw. verschieblich ausgebildet ist, so dass der Hebel des Eingangsanlenkpunkts 66 relativ zu dem Lagerpunkt 62 variiert werden kann.
- In
Fig. 6d sind zwei Kraft-Weg-Verläufe der beiden Anschlussvarianten aus denFiguren 6a bis c für die unterschiedlichen Arbeitshubpositionen S1, S2, S3 dargestellt, wobei die Variante mit kleinem Hebel des einseitigen Hebels 60 mit einer durchgezogenen Linie und die zweite Variante mit großem Hebel des einseitigen Hebels 60 als gestrichelte Linie dargestellt ist. Durch die Variation des Hebels bzw. der Hebelwirkung des einseitigen Hebels 60 kann die von der Antriebsvorrichtung 10 übertragene Maximal-Kraft variiert werden, wobei wie es inFig. 6d dargestellt ist, die Kraft-Weg-Kennlinie lediglich parallel verschoben ist. Dadurch ergibt sich eine weitere Variationsmöglichkeit zur Verwendung der Antriebsvorrichtung 10. - In den
Figuren 7a bis c ist eine weitere Einstellungsvariante der Antriebsvorrichtung 10 mit dem einseitigen Hebel 60 dargestellt. Dabei ist das Übertragungselement 18 gegenüber den Varianten ausFig. 6a bis c noch näher zu der Abtriebseinheit 16 hin versetzt drehbar gelagert. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Durch den Versatz des Übertragungselements 18 ist der Arbeitshub S des Ausgangsglieds 22 verkürzt. Die Ausgangsposition des Ausgangsglieds 22 liegt in einem Bereich, in dem die Abtriebseinheit 16 wegen ihres progressiven Verlaufs bereits eine hohe Anfangskraft entwickelt. Durch den kleinen Wert des Winkels 44 (umgekehrter Kniehebel) überträgt das Übertragungselement 18 beim Start eine hohe Kraft über den Ausgangsanlenkpunkt 28 auf die Abtriebseinheit 16, die im Verlauf des Arbeitshubs degressiv abnimmt. Im Zusammenspiel mit dem in
Fig. 1 bereits beschriebenen Einfluss des Winkels 48 im Krafteinleitungsbereich des Übertragungselements 18 entsteht ein nahezu konstanter Kraft-Weg-Verlauf, wie bereits anhand derFig.3 a-d beschrieben, allerdings auf einem höheren Kraftniveau, unter Inkaufnahme eines kürzeren Arbeitshubs. Durch den einseitigen Hebel 60 kann die Grundübersetzung der Krafteinleitung in den Eingangsanlenkpunkt 30 im Übertragungselement 18, wie bereits anhandFig. 6 a-d beschrieben, variiert und die Gesamtkraft damit nochmals verstärkt werden. Im Ergebnis kann dadurch eine hohe Kraft über einen verkürzten Arbeitshub S eingestellt werden, wie es inFig. 7d dargestellt ist. -
Fig. 8 zeigt eine weitere Ausführungsform der Antriebsvorrichtung 10 mit einem längenverstellbaren Ausgangsverbindungselement 34. Damit wird die gleiche Wirkung erzielt wie mit der Versetzung des Drehpunkts 26 des Übertragungselements 18, nämlich die Variation des Winkels 44. Der Drehpunkt 26 kann deshalb bei dieser Ausführungsform fix bleiben. Eine erste Variante mit kurzem Verbindungselement ist inFig. 8 mit durchgezogenen Linien dargestellt, wohingegen eine zweite Variante mit verlängertem Verbindungselement mit gestrichelten Linien dargestellt ist. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Das Übertragungselement 18 ist als starre einstückige Scheibe ausgebildet, die an dem Drehpunkt 26 drehbar gelagert ist. Das Übertragungselement 18 weist drei Anschlusspunkte auf, an denen das Eingangsverbindungselement 32 an zwei unterschiedlichen Positionen anlenkbar ist, um den Winkel 48 des Eingangskniehebels 46 einzustellen, und das Ausgangsverbindungselement 34 am Ausgangsanlenkpunkt 28 angelenkt ist. Ferner weist das Ausgangsverbindungselement 34 ein Längeneinstellungselement 68 auf, um eine Länge des Ausgangsverbindungselements 34 zu variieren und dadurch den Winkel 44 des Ausgangskniehebels 42 einstellen zu können.
- In der in
Fig. 8 dargestellten ersten Anschlussvariante ist der Eingangsanlenkpunkt 30 in der äußeren Anschlussposition gebildet, wobei das Längeneinstellungselement 68 derart verkürzt ist, dass der Winkel 44 in der inFig. 8 dargestellten Ausgangsarbeitshubposition etwa 90° beträgt und durch die Wahl der Anschlussposition des Anlenkpunkts 30 der Winkel 48 des Eingangskniehebels 46 etwa 120° aufweist. Daraus resultiert mit einfachen Mitteln ein progressiver Kraft-Weg-Verlauf des Ausgangsglieds 22, welcher der Darstellung inFig. 2d entspricht. - In der in
Fig. 8 dargestellten zweiten Anschlussvariante ist der Eingangsanlenkpunkt 30' an dem Inneren der Anschlusspunkte angelenkt, so dass zwischen den beiden Punkten 28, 30' ein Winkel von etwa 30° gebildet ist. Das Längeneinstellungselement 68 ist derart verlängert, dass in der inFig. 8 dargestellten Ausgangsstellung der Arbeitshubposition der Winkel 44' des Ausgangskniehebels 42 spitz ist und weniger als 45° aufweist. Demgegenüber ist der Winkel 48' des Eingangskniehebels 46 in dieser Arbeitshubposition etwa 90°. Aus dieser Einstellung resultiert ein etwa linearer Kraft-Weg-Verlauf des Ausgangsglieds 22, welcher der Darstellung inFig. 3d entspricht. Durch die Wahl der Anlenkpositionen an dem Übertragungselement 18 und die Wahl der Länge des Ausgangsverbindungselements 34 mittels des Längeneinstellungselements 68 lassen sich auch zwischen den Extremsituationen verschiedene Kraft-Weg-Verläufe des Ausgangsglieds 22 einstellen. In einer weiteren Ausführungsform ist auch der Ausgangsanlenkpunkt 28 in unterschiedlichen Anschlussvarianten versetzbar, um den Winkel 44 zu variieren. - In
Fig. 9 ist eine alternative Ausführungsform der Antriebsvorrichtung 10 schematisch dargestellt, wobei das Übertragungselement 18 aus zwei verdrehbaren Scheiben gebildet ist. Das Übertragungselement 18 weist ein Eingangsglied 70 und ein Ausgangsglied 72 auf, wobei der Eingangsanlenkpunkt 30 an dem Eingangsglied 70 und der Ausgangsanlenkpunkt 28 an dem Ausgangsglied 72 gebildet ist. Das Eingangsglied 70 und das Ausgangsglied 72 sind an dem Drehpunkt 26 drehbar gelagert. Das Eingangsglied 70 und das Ausgangsglied 72 sind relativ zueinander verdrehbar ausgebildet und sind in unterschiedlichen Verdrehwinkeln drehfest miteinander verbindbar (nicht dargestellt), um das Drehmoment 38 auf die Abtriebseinheit 16 zu übertragen. Das Eingangsglied 70 und das Ausgangsglied 72 sind in unterschiedlichen Winkelpositionen miteinander drehfest verbindbar, um unterschiedliche Winkelpositionen des Eingangsanlenkpunktes 30 und des Ausgangsanlenkpunktes 28 relativ zueinander einstellen zu können. Ferner weist das Ausgangsverbindungselement 34 das Längeneinstellungselement 68 auf, um den Winkel 44 des Ausgangskniehebels 42 entsprechend einstellen zu können. - In dieser Ausführungsform ist die Antriebseinheit 14 über einen zweiseitigen Hebel 74 mit dem Eingangsanlenkpunkt 30 verbunden, wobei ein Anlenkpunkt 76 der Antriebseinheit 14 verschieblich an dem zweiseitigen Hebel 74 gelagert ist und der zweiseitige Hebel 74 an einem Drehpunkt 78 mit festem Widerlager gelagert ist.
- Bei dieser Ausführungsform ist es besonders vorteilhaft, dass die Relativdrehung der Anlenkpunkte 28, 30 durch das variable Übertragungselement 18 mit einfachen Mitteln und wenigen Handgriffen eingestellt werden kann und wobei durch das Längeneinstellungselement 68 der Winkel 44 des Ausgangskniehebels 42 mit einfachen Mitteln eingestellt werden kann. Ferner kann über den zweiseitigen Hebel die Kraft der Antriebseinheit 14 umgelenkt und die Größe der übertragbaren Kraft ebenfalls eingestellt werden.
- In
Fig. 10 ist eine Variante der Antriebsvorrichtung 10 ausFig. 9 schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. Die Antriebseinheit 14 ist über den zweiseitigen Hebel 74 mit dem Eingangsanlenkpunkt 30 verbunden, wobei in dieser Ausführungsform das Widerlager des Drehpunkts 78 verschieblich bzw. variabel ausgebildet ist und die Antriebseinheit 14 mittels eines festen Anlenkpunkts 80 an dem zweiseitigen Hebel 74 angelenkt ist. Durch die besondere Ausführungsform des zweiseitigen Hebels 74 lassen sich ebenfalls wie in der Ausführungsform gemäßFig.9 unterschiedliche Kräfte an dem Ausgangsglied 22 einstellen. - In
Fig. 11 ist eine weitere Variante der Antriebsvorrichtung 10 ausFig. 9 schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten ausgeführt sind. - Bei der in
Fig. 11 dargestellten Variante ist die Antriebseinheit 14 seitlich neben dem Übertragungselement 18 angeordnet und über den verschieblichen Anlenkpunkt 76 mit dem zweiseitigen Hebel 74 verbunden. Dadurch wird die Kraft 36, die von der Antriebseinheit 14 ausgeübt wird, in derselben Richtung auf das Übertragungselement 18 übertragen. Durch diese Ausführungsform ist eine besonders kompakte Bauform der Antriebsvorrichtung 10 im Allgemeinen möglich. - In
Fig. 12 ist eine weitere Variante der Antriebsvorrichtung 10 schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Die Antriebseinheit 14 ist in dieser Ausführungsform über einen Dreieckshebel 82 mit dem Eingangsanlenkpunkt 30 verbunden. Der Dreieckshebel 82 weist einen Eingangsanlenkpunkt 84 und einen Ausgangsanlenkpunkt 86 auf und ist drehbar an einem Drehpunkt 88 gelagert. In dieser Ausführungsform ist der Dreieckshebel 82 um den Drehpunkt 88 drehbar gelagert, der oberhalb des Dreieckshebels 82 gelagert ist. Dadurch wird die Kraft 36 von der Antriebseinheit 14 auf den Eingangsanlenkpunkt 30 gleichgerichtet übertragen.
- In
Fig. 13 ist eine Variante der Antriebsvorrichtung 10 ausFig. 12 schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - In der Ausführungsform aus
Fig. 13 ist der Dreieckshebel 82 um den Drehpunkt 88 drehbar gelagert, der unterhalb des Dreieckshebels 82 gelagert ist. Dadurch wird die Kraft 36, die von der Antriebseinheit 14 ausgeübt wird, in entgegengesetzter Richtung auf den Anlenkpunkt 30 übertragen. Mit anderen Worten wird aus einer Schubkraft eine Zugkraft und umgekehrt. - In den
Figuren 14a und b ist eine detaillierte Ausführungsform der Antriebsvorrichtung 10 mit einem variablen einseitigen Hebel 60 und einem variablen Übertragungselement 18 in unterschiedlichen Arbeitshubpositionen schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Der variable Hebel 60 ist drehbar um den Drehpunkt 62 gelagert. Der Ausgangsanlenkpunkt 64 ist über das Eingangsverbindungselement 32 mit dem Eingangsanlenkpunkt 30 des Übertragungselements 18 verbunden. Der Eingangsanlenkpunkt 66 ist über eine Pleuelstange mit der Antriebseinheit 14 verbunden, die in dieser Ausführungsform als Spindelantrieb 14 ausgebildet ist. Der Eingangsanlenkpunkt 66 ist mittels einer Verstellschraube 90 in axialer Richtung des einseitigen Hebels 60 verstellbar, so dass der Hebelweg, der zwischen dem Eingangsanlenkpunkt 66 und dem Ausgangsanlenkpunkt 64 bzw. dem Drehpunkt 62 wirkt, über die Verstellschraube 90 einstellbar ist. Die Verstellschraube 90 ist mit einem entsprechenden Drehbedienelement 92 verbunden, um die Handhabung zu vereinfachen bzw. zu automatisieren.
- Das Übertragungselement 18 weist das Eingangsglied 70 und das Ausgangsglied 72 auf, die in unterschiedlichen Verdrehwinkeln drehfest miteinander verbindbar sind und um den Drehpunkt 26 drehbar gelagert sind. Das Eingangsglied 70 und das Ausgangsglied 72 weisen jeweils einen Zahnabschnitt 94 auf, die mittels eines Zahnrads 96 relativ zueinander verstellbar sind, um die Winkelposition einzustellen. Dadurch lässt sich die Relativposition des Eingangsanlenkpunkts 30 zu dem Ausgangsanlenkpunkt 28 mit einfachen Mitteln und vorzugsweise automatisch einstellen.
- Der Drehpunkt 26 ist verschieblich gelagert und mittels einer Verstellschraube 98 relativ zu der Abtriebseinheit 16 verschieblich bzw. versetzbar ausgebildet. Die Verstellschraube 98 ist mit einem Bedienelement 100 verbunden, um die entsprechende Position des Drehpunkts 26 vorzugsweise motorisch einzustellen.
- In
Fig. 14a ist eine Ausgangsposition des Arbeitshubs dargestellt, bei der der Winkel 44 etwa 90° beträgt und inFig. 14b ist eine Endposition des Arbeitshubs schematisch dargestellt, bei der der Winkel 44 des Ausgangskniehebels etwa 130° beträgt. Daraus ergibt sich ein progressiver Kraft-Weg-Verlauf. - In den
Figuren 15a und b ist die detaillierte Ausführungsform aus denFiguren 14a und b in einer alternativen Einstellung in Bezug auf die Relativwinkelposition des Eingangsanlenkpunkts 30 und des Ausgangsanlenkpunkts 28 sowie des Drehpunkts 26 dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - In der in den
Figuren 15a und b dargestellten Einstellung ist das Eingangsglied 70 und das Ausgangsglied 72 des Übertragungselements 18 in einer anderen Winkelposition zueinander eingestellt, so dass ein größerer Winkel von etwa 270° zwischen dem Eingangsanlenkpunkt 30 und dem Ausgangsanlenkpunkt 28 relativ zu dem Drehpunkt 26 realisiert ist. Ferner ist der Drehpunkt 26 relativ zu der Einstellung aus denFiguren 14a, b zu der Abtriebseinheit 16 hin versetzt, so dass ein kleinerer Winkel 44 des Ausgangskniehebels 42 in der Ausgangsposition ausFig. 15a eingestellt ist. Dadurch ergibt sich ein etwa konstanter Kraft-Weg-Verlauf des Ausgangsglieds 22. InFig. 15b ist eine Endposition des Arbeitshubs für die Einstellung ausFig. 15a dargestellt. - Im Allgemeinen lassen sich durch die drei Einstellmöglichkeiten aus der Ausführungsform aus
Fig. 14 und15 bzw. durch die drei Freiheitsgrade der Antriebsvorrichtung 10 aus denFiguren 14 und15 eine Vielzahl von unterschiedlichen Kraft-Weg-Verläufen des Ausgangsglieds 22 einstellten, wodurch im Allgemeinen die Variationsmöglichkeit der Antriebsvorrichtung 10 verbessert und automatisierbar wird. - In
Fig. 16a ist eine weitere Ausführungsform der Antriebsvorrichtung 10 schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Das Übertragungselement 18 ist durch das Eingangsglied 70 und das Ausgangsglied 72 gebildet, die relativ zueinander verdrehbar und drehfest miteinander verbindbar sind. Das Ausgangsverbindungselement 34 weist das Längeneinstellungselement 68 auf, um den Winkel 44 entsprechend einzustellen. Die Antriebseinheit 14 ist über den zweiseitigen Hebel 74 mit einem zweiten Übertragungselement 102 verbunden, das mit dem ersten Übertragungselement 18 verbunden ist, um die von der Antriebseinheit 14 übertragene Kraft als das Drehmoment 38 auf das Übertragungselement 18 zu übertragen. Das Übertragungselement 102 weist ein Eingangsglied 104 und ein Ausgangsglied 106 auf, die drehbar an einem Drehpunkt 108 gelagert sind und die verdrehbar zueinander und drehfest miteinander verbindbar sind. An dem Eingangsglied 104 ist ein Eingangsanlenkpunkt 110 ausgebildet und an dem Ausgangsglied 106 ist ein Ausgangsanlenkpunkt 112 ausgebildet. Das Eingangsglied 104 und das Ausgangsglied 106 sind verdrehbar zueinander ausgebildet und drehfest miteinander verbindbar, um unterschiedliche Winkelpositionen des Eingangsanlenkpunkts 110 und des Ausgangsanlenkpunkts 112 relativ zueinander einzustellen. Der Eingangsanlenkpunkt 110 ist mit dem zweiseitigen Hebel 74 verbindbar bzw. verbunden, um die Kraft von der Antriebseinheit 14 auf das Übertragungselement 102 zu übertragen. Der Ausgangsanlenkpunkt 112 ist mittels einer Pleuelstange mit dem Anlenkpunkt 30 des Übertragungselements 18 verbunden, um eine Kraft von dem Übertragungselement 102 auf das Übertragungselement 18 zu übertragen. Durch diese Ausführungsform mit den zwei drehbar gelagerten und einstellbaren Übertragungselementen 18, 102 und dem zweiseitigen Hebel 74, ist der Kraft-Weg-Verlauf des Ausgangsglieds 22 sehr präzise einstellbar.
- In
Fig. 16b ist eine Variante der Ausführungsform ausFig. 16a dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Das Längeneinstellungselement 68 ist in dieser Ausführungsform derart eingestellt, dass der Anlenkpunkt der Abtriebseinheit 16 versetzt ist und das Ausgangsglied 22 durch eine Zugbelastung des Anlenkpunkts nach oben und eine Druckbelastung nach unten bewegt wird. Dadurch kann die Bewegungsrichtung des Ausgangsglieds 22 bei gleicher Bewegung der Antriebseinheit 14 umgekehrt werden.
- In
Fig. 16c ist eine weitere Ausführungsform der Antriebsvorrichtung 10 ausFig. 16a dargestellt, bei der die Abtriebseinheit 16 eine Mehrzahl von unterschiedlichen Anlenkpunkten aufweist, um eine Längenverstellung und eine Kraft/Weg-Variation zu ermöglichen. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Die Abtriebseinheit 16 weist eine starre Platte oder Scheibe auf, die drehbar gelagert ist und an einem Abtriebspleuel angelenkt ist, das mit dem Ausgangsglied 22 verbunden ist und einen Kniehebel bildet. Die starre Scheibe weist eine Mehrzahl von unterschiedlichen Anlenkpunkten 113', 113", 113"' auf, an denen das Eingangsglied 20 angelenkt werden kann. Dadurch kann eine weitere Längenverstellung und somit eine entsprechende Winkelverstellung des Kniehebels realisiert werden, wodurch eine zusätzliche Kraft/Weg-Variation ermöglicht wird.
- In
Fig. 16d ist eine weitere Ausführungsform der Antriebsvorrichtung 10 schematisch dargestellt, bei der das Übertragungselement 102 mittels eines Längeneinstellungselements mit der Abtriebseinheit 16 verbunden ist, die in dieser Ausführungsform eine starre Platte oder Scheibe mit drei Anlenkpunkten aufweist und einen Kniehebel bildet. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich Besonderheiten erläutert sind. - Dadurch, dass das Übertragungselement 102 mit der starren Platte oder Scheibe der Abtriebseinheit 16 verbunden ist, kann die Bewegungsrichtung des Ausgangsglieds 22 umgekehrt werden, so dass das Ausgangsglied 22 nach oben bewegt wird, sofern der Ausgangsanlenkpunkt 112 nach oben bewegt wird, wie es durch einen Pfeil 115 angedeutet ist. Dadurch kann mit einfachen Mitteln die Bewegungsrichtung des Ausgangsglieds 22 umgekehrt werden und gleichzeitig der benötigte Bauraum für die Antriebsvorrichtung 10 reduziert werden.
- In
Fig. 16e ist eine weitere Ausführungsform der Antriebsvorrichtung 10 schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Die Antriebsvorrichtung 10 aus
Fig. 16e weist gegenüber der Ausführungsform ausFig. 16d zwei Abtriebseinheiten 16, 16' auf, die durch zwei parallele Kniehebel gebildet sind und mittels einer Pleuelstange 117 miteinander verbunden sind. Die Pleuelstange 117 verbindet die beiden Abtriebseinheiten 16, 16' derart, dass die zwei Ausgangsglieder 22, 22' parallel mit dem gleichen Kraft/Weg-Verlauf bewegt werden. Dadurch kann eine gleichmäßigere Kraftverteilung auf das Werkzeug 24 erzielt werden. - In
Fig. 16f ist eine weitere Ausführungsform der Antriebsvorrichtung 10 schematisch dargestellt, bei der der Eingangsanlenkpunkt 30 kontinuierlich linear verstellbar ist und unterschiedliche Ausgangsanlenkpunkte 28 wählbar sind. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich Besonderheiten erläutert sind. - Der Eingangsanlenkpunkt 30 ist mittels einer Linearverstelleinrichtung 119 an dem Übertragungselement 18 linear in unterschiedlichen Abständen zu dem Drehpunkt 26 verstellbar gelagert, um den Hebel des entsprechenden Eingangskniehebels 46 einzustellen. Das Übertragungselement 18 weist unterschiedliche Ausgangsanlenkpunkte 28, 28', 28" auf, um das Verbindungselement 34 an dem Übertragungselement 18 in unterschiedlichen Positionen anzulenken und den Winkel des entsprechenden Kniehebels 42 einzustellen. Das Verbindungselement 34 weist unterschiedliche Verbindungspunkte bzw. Lagerpunkte auf, um unterschiedliche Längen zwischen dem Ausgangsanlenkpunkt 28 und dem Eingangsglied 20 der Abtriebseinheit 16 einzustellen. Dazu kann das Verbindungselement 34 alternativ oder zusätzlich das Längeneinstellungselement 68 aufweisen. Die Funktionsweise der Lagerung des Verbindungselements 34 an den Ausgangsanlenkpunkten 28, 28', 28" ist im Weiteren näher erläutert.
- In
Fig. 16g ist eine Variante der Ausführungsform ausFig. 16f schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich Besonderheiten erläutert sind. - Das Verbindungselement 34 weist dabei unterschiedliche Verbindungspunkte auf, um das Verbindungselement 34 an den verschiedenen Ausgangsanlenkpunkten 28, 28', 28" und eine Mehrzahl von Verbindungspunkten bzw. Lagerpunkten auf, um das Verbindungselement 34 an dem Eingangsglied der Abtriebseinheit 16 festzulegen. Die Verbindungspunkte bzw. Lagerpunkte ersetzen dabei das Längeneinstellungselement 68. Die Abtriebseinheit 16 weist ferner mehrere Anlenkpunkte 20, 20' auf, die das Eingangsglied 20, 20' der Abtriebseinheit 16 bilden können und entsprechend unterschiedlich mit dem Verbindungselement 34 verbunden werden können. Dadurch wird eine Vielzahl von Variationen der Einstellung des Winkels 44 des Kniehebels 42 möglich.
- Es versteht sich, dass die Varianten aus
Fig. 16f und16g auch mit den vorherigen Ausführungsformen, insbesondere mit den parallelen Kniehebeln ausFig. 16e kombinierbar sind. - In
Fig. 17 ist eine Variante der Antriebsvorrichtung 10 ausFig. 9 mit einer alternativen Abtriebseinheit schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Das Ausgangsverbindungselement 34 mit dem Längeneinstellungselement 68 ist mit einem Exzenter 114 verbunden, der die Abtriebseinheit der Antriebsvorrichtung 10 bildet.
- Der Exzenter 114 weist das Eingangsglied 20 auf, das exzentrisch um einen Drehpunkt 116 drehbar gelagert ist und das Ausgangsglied 22 entsprechend translatorisch je nach Drehposition bewegt. Dadurch kann mit einfachen Mitteln eine Abtriebseinheit 16 gebildet werden.
- In
Fig. 18 ist eine alternative Ausführungsform der Antriebsvorrichtung 10 schematisch dargestellt mit einer alternativen Antriebseinheit. Die Antriebsvorrichtung 10 weist einen Exzenter 118 auf, der die Antriebseinheit bildet. Der Exzenter 118 ist exzentrisch um einen Drehpunkt 120 gelagert und wird mit einem Drehmoment von einer Antriebseinheit angetrieben, so dass eine Kraft mittels des Eingangsverbindungselements 32 auf das Übertragungselement 18 übertragbar ist. Dadurch kann mit einfachen Mitteln die Antriebsvorrichtung 10 angetrieben werden. In einer einfachen Ausführungsform ist das Eingangsverbindungselement 32 des Exzenters 118 direkt mit dem Eingangsglied 20 der Abtriebseinheit verbunden und weist zusätzlich das Längeneinstellungselement 68 auf. Das Übertragungselement 18 wird dabei durch die Exzenterscheibe gebildet, wobei eine Drehbewegung des Exzenters 118 direkt auf das Eingangsglied 20 wirkt. Dabei bildet das Eingangsverbindungselement 32 mit einem Mittelpunkt der Exzenterscheibe und dem exzentrischen Drehpunkt 120 den Ausgangskniehebel 42. - In
Fig. 19 ist eine alternative Ausführungsform der Antriebsvorrichtung 10 schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Das Übertragungselement 18 ist in dieser Ausführungsform als einfacher Hebel ausgebildet, der von einem Drehmomentmotor kreisförmig angetrieben wird, und im Mittelpunkt 26 bzw. im Drehpunkt 26 des Motors gelagert ist. Das Übertragungselement 18 weist in dieser Ausführungsform lediglich den Ausgangsanlenkpunkt 28 auf, der über das Ausgangsverbindungselement 34 mit der Abtriebseinheit 16 verbunden ist. Diese in
Fig. 19 dargestellte Ausführungsform bildet die einfachste Ausführungsform der Erfindung Allerdings wird der Motor im Gegensatz zu den vorgehend vorgestellten Ausführungen über den Hubverlauf nicht gleichmäßig ausgelastet und muss für eine hohe Momentenspitze ausgelegt, also überdimensioniert sein. - In
Fig. 20 ist eine weitere Ausführungsform der Antriebsvorrichtung 10 schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Das Übertragungselement 18 ist über eine Pleuelstange mit einem Drehmomentmotor 122 verbunden, um das Drehmoment 38 auf das Übertragungselement 18 zu übertragen. Dies stellt eine alternative Antriebsmöglichkeit für die Antriebsvorrichtung 10 dar. Damit werden die Spitzen im Momentbedarf gegenüber der in
Fig. 19 beschriebenen Ausführung vermieden und der Motor kann deshalb kleiner ausgelegt werden. - In
Fig. 21 sind unterschiedliche Kraft-Weg-Verläufe im Verhältnis zueinander schematisch dargestellt, die durch die unterschiedlichen Einstellungen bzw. die unterschiedlichen Ausführungsformen der vorliegenden Erfindung einstellbar ist. - Dabei wird deutlich, dass durch die Einstellungen sowohl kurze Arbeitshübe mit hohen Kräften als auch große Arbeitshübe mit konstanten hohen oder niedrigen Kräften einstellbar sind. Ferner können progressive Kraft-Weg-Verläufe eingestellt werden, sowie linear ansteigende Kraft-Weg-Verläufe realisiert werden. Bei allen gezeigten Verläufen sind die Antriebskräfte über den gesamten Hubverlauf konstant. Eine Ausnahme hiervon bildet lediglich die Ausführung gemäß
Fig. 19 . - Im Ergebnis ist somit ein variabler Einsatz der Antriebsvorrichtung 10 möglich, die auf die Anforderungen von unterschiedlichen Bearbeitungs- bzw. Umformschritten angepasst werden kann, und trotzdem wegen des gleichmäßigen Bedarfs an Antriebskraft einen ökonomischen Einsatz von Antriebseinheiten in kleinstmöglicher Bauart ermöglicht und gleichzeitig den Verzicht auf aufwendige Energiespeichereinrichtungen erlaubt.
- In
Fig. 22 sind die unterschiedlichen Ausgangsanlenkpunkte 28 des Übertragungselements 18 im Detail dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Das Verbindungselement 34 bzw. die Pleuelstange 34 ist an den unterschiedlichen Ausgangsanlenkpunkten 28, 28' mittels Steckverbindungen verbindbar, um die Pleuelstange 34 in unterschiedlichen Positionen an dem Übertragungselement 18 anzulenken. Die Verbindung zwischen der Pleuelstange 34 und dem Verbindungselement 18 weist dabei an der Pleuelstange 34 eine Steckverbindung 130 auf, in die hinein ein beweglich gelagertes Steckelement 132 einführbar ist, um das Verbindungselement 18 mit der Pleuelstange 34 zu verbinden. Die Steckelemente 132 weisen jeweils eine Mehrzahl von parallelen Steckbolzen auf, die in entsprechende Aufnahmen der jeweiligen Steckverbindungen 130 greifen. Dadurch kann der Durchmesser der einzelnen Steckbolzen klein gehalten werden und ein günstiges Längen-Durchmesser-Verhältnis der Steckbolzen erzielt werden. Das Verbindungselement 18 weist dabei zwei parallele starre Platten auf, zwischen denen die Pleuelstange 34 seitlich geführt ist und durch die Verbindung zwischen den Steckelementen 132 und der Steckverbindung 130 an den unterschiedlichen Ausgangsanlenkpunkten 28, 28' angelenkt und mit dem Übertragungselement verbindbar ist.
- Den Steckelementen 132 ist jeweils ein Spindelrad 134 zugeordnet, das das jeweilige Steckelement 132 in axialer Richtung bewegt und entsprechend in die Steckverbindung 130 einführen kann bzw. aus der Steckverbindung 130 lösen kann. Das Spindelrad 134 überträgt eine Drehbewegung in eine axiale Bewegung, um die Steckelemente 132 entsprechend zu bewegen. Das Spindelrad 134 bzw. die Spindelräder 134 sind jeweils mittels eines Antriebsmotors 136 drehbar, um die Steckelemente 132 in der axialen Richtung zu bewegen und in die Steckverbindung 130 hineinzuführen oder aus der Steckverbindung 130 zu lösen. Der Antriebsmotor 136 ist mittels einer Antriebskette 138 mit dem jeweiligen Spindelrad 134 verbunden, um das Spindelrad 134 entsprechend zu rotieren. Alternativ kann der Antriebsmotor 136 auch mittels eines Zahnrads oder eines Antriebsriemens mit dem jeweiligen Spindelrad 134 verbunden sein.
- Durch diese Verbindung zwischen der Pleuelstange 34 und dem Übertragungselement 18 kann mit geringem Aufwand der Ausgangsanlenkpunkt 28 ausgewählt bzw. eingestellt werden, wobei immer jeweils nur eines der Steckelemente 132 mit einer der Steckverbindungen 130 verbunden sein kann, wobei die übrigen jeweils nicht verbunden sind, um eine entsprechende Drehung der Pleuelstange 34 um den jeweiligen Ausgangsanlenkpunkt 28 zu gewährleisten. In
Fig. 22 ist dabei der Anlenkpunkt 28 ausgewählt bzw. verbunden, wohingegen der Anlenkpunkt 28' gelöst ist. - In
Fig. 23 ist eine weitere Ausführungsform der Antriebsvorrichtung 10 schematisch dargestellt. Gleiche Elemente sind mit gleichen Bezugsziffern bezeichnet, wobei hier lediglich die Besonderheiten erläutert sind. - Bei der Ausführungsform aus
Fig. 23 sind die jeweiligen Anlenkpunkte mit der jeweiligen Pleuelstange 32, 34 verbunden und jeweils exzentrisch an einer Drehscheibe gelagert, um den jeweiligen Anlenkpunkt bzw. die Anlenkposition einzustellen. - Die Eingangspleuelstange 32 ist mittels einer ersten Drehscheibe 150 einstellbar an dem Übertragungselement 18 angelenkt. Die erste Drehscheibe 150 ist an dem Übertragungselement 18 drehbar gelagert und weist einen exzentrisch ausgebildeten Anlenkpunkt 152 auf, der den Eingangsanlenkpunkt 30 bildet. Durch Rotation der Drehscheibe 150 kann somit die Position des Eingangsanlenkpunktes 30 variiert werden, indem die Drehscheibe 150 in unterschiedlichen Rotationspositionen an dem Übertragungselement 118 festgelegt wird.
- Das Verbindungselement 34 ist mittels einer zweiten Drehscheibe 134 an dem Übertragungselement 18 angelenkt bzw. mit dem Übertragungselement 118 verbunden. Die zweite Drehscheibe 154 ist drehbar gelagert und weist einen Exzenteranlenkpunkt 156 auf, der den Ausgangsanlenkpunkt 28 bildet. Die zweite Drehscheibe 154 ist in unterschiedlichen Rotationspositionen an dem Übertragungselement 118 festlegbar, um die Position des Ausgangsanlenkpunkts 28 zu variieren und den Winkel 44 des Kniehebels 42 entsprechend einzustellen.
- An der Abtriebseinheit 16 bzw. der Platte der Abtriebseinheit 16 ist eine dritte Drehscheibe 158 ausgebildet und drehbar gelagert. Die dritte Drehscheibe 158 weist einen Exzenteranlenkpunkt 160 auf, der das Eingangsglied 20 bzw. den Eingangsanlenkpunkt der Abtriebseinheit 16 bildet. An dem Exzenteranlenkpunkt 160 ist das Verbindungselement 34 gelagert, um die Kraft von dem Übertragungselement 18 auf die Abtriebseinheit 16 zu übertragen. Durch Rotation der dritten Drehscheibe 158 und die Festlegung der dritten Drehscheibe 158 in den unterschiedlichen Rotationspositionen kann der Anlenkpunkt an der Abtriebseinheit 16 entsprechend variiert und eingestellt werden, um so eine weitere Variationsmöglichkeit des Winkels 44 und des Ausgangskniehebels 42 zu bieten. Das Verbindungselement 34 weist für eine weitere Variation des Kniehebels 42 die Verstelleinrichtung 68 auf.
- Durch die drei Drehscheiben 150, 154, 158 mit den exzentrisch gelagerten Anlenkpunkten 30, 156, 160 können die Hebelverhältnisse der Antriebsvorrichtung 10 im Allgemeinen mit sehr vielen Variationsmöglichkeiten und nahezu stufenlos eingestellt werden.
- Es versteht sich, dass die Ausführungsform aus
Fig. 23 auch jeweils nur eine oder zwei der dargestellten Drehscheiben 150, 154, 158 aufweisen kann.
Claims (15)
- Antriebsvorrichtung (10), insbesondere zum Antreiben einer Umformvorrichtung (12), mit:- mindestens einer Antriebseinheit (14), die eine Antriebskraft (30) oder ein Antriebsmoment bereitstellt,- einer Abtriebseinheit (16), die ein Eingangsglied (20) und ein translatorisch bewegliches Ausgangsglied (22) aufweist, wobei die Abtriebseinheit (16) einen progressiven Kraft-Weg-Verlauf zwischen dem Eingangsglied (20) und dem Ausgangsglied (22) aufweist,- einem Übertragungselement (18), das an einem Drehpunkt (26) drehbar gelagert ist, wobei das Übertragungselement (18) mit der Antriebseinheit (14) derart verbunden ist, dass ein Drehmoment (38) auf das Übertragungselement (18) übertragbar ist, und wobei das Übertragungselement (18) einen Eingangsanlenkpunkt (30) und einen Ausgangsanlenkpunkt (28) aufweist, wobei an dem Ausgangsanlenkpunkt (28) ein Verbindungselement (34) angelenkt ist, das mit dem Übertragungselement (18) einen Kniehebel (42) bildet wobei das Verbindungselement (34) mit dem Eingangsglied (20) der Abtriebseinheit (16) derart verbunden ist, dass eine Kraft auf die Abtriebseinheit (16) übertragbar ist, wobei ein Winkel (44) des Kniehebels (42) für eine Ausgangsposition des Ausgangsglieds (22) wechselbar ist, um den Kraft-Weg-Verlauf des Ausgangglieds (22) einzustellen,dadurch gekennzeichnet, dass das Übertragungselement (18) zwei separate Übertragungsglieder (70, 72) aufweist, die um den Drehpunkt (26) drehbar gelagert sind, wobei der Eingangsanlenkpunkt (30) und der Ausgangsanlenkpunkt (28) jeweils an einem der Übertragungsglieder (70, 72) ausgebildet sind, wobei die Übertragungsglieder (70, 72) in unterschiedlichen Verdrehwinkeln miteinander drehfest verbindbar sind.
- Antriebsvorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass ein Kraft-Weg-Verlauf des Übertragungsefements (18) gleichläufig oder gegenläufig zu dem Kraft-Weg-Verlauf der Abtriebseinheit (16) wählbar ist, um den Kraft-Weg-Verlauf des Ausgangglieds (22) einzustellen.
- Antriebsvorrichtung nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass der Ausgangsanlenkpunkt (28) des Übertragungselements (18) mit dem Eingangsglied (20) der Abtriebseinheit (16) verbunden ist und eine Länge des Verbindungselements (34) einstellbar ist.
- Antriebsvorrichtung nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass der Drehpunkt (26) des Übertragungselements (18) relativ zu der Abtriebseinheit (16) versetzbar ausgebildet ist.
- Antriebsvorrichtung nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, dass der Ausgangsanlenkpunkt (28) an einer Exzenterdrehscheibe (154) an dem Übertragungselement (18) gelagert ist, um den Winkel (44) des Kniehebels (42) einzustellen.
- Antriebsvorrichtung nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, dass an dem Eingangsanlenkpunkt (30) ein Eingangsverbindungselement (32) angelenkt ist, das mit dem Übertragungselement (18) einen zweiten Kniehebel (46) bildet.
- Antriebsvorrichtung nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, dass das Verbindungselement (34) an der Abtriebseinheit (16) mittels einer Exzenterdrehscheibe (158) gelagert ist, um den Winkel (44) des Kniehebels (42) einzustellen.
- Antriebsvorrichtung nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, dass die Antriebseinheit (14) ein Antriebsmoment bereitstellt, wobei die Antriebseinheit (14) direkt oder mittels einer Pleuelstange mit dem Übertragungselement (18) verbunden ist.
- Antriebsvorrichtung nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, dass die Antriebseinheit (14) einen Exzenterantrieb (118) aufweist.
- Antriebsvorrichtung nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, dass die Antriebseinheit (14) einen Spindelantrieb (14) aufweist.
- Antriebsvorrichtung nach einem der Ansprüche 1 bis 10, dadurch gekennzeichnet, dass das Eingangsverbindungselement mindestens ein zweites drehbar gelagertes Übertragungselement (102) mit zwei Anlenkpunkten (110, 112) aufweist, wobei ein Winkel zwischen den Anlenkpunkten (110, 112) wechselbar ist.
- Antriebsvorrichtung nach einem der Ansprüche 1 bis 11, dadurch gekennzeichnet, dass die Abtriebseinheit (16) ein Kniegelenk (16) aufweist.
- Antriebsvorrichtung nach einem der Ansprüche 1 bis 12, dadurch gekennzeichnet, dass die Abtriebseinheit (114) durch einen Exzenter (114) gebildet ist.
- Pressenmodul für eine Umformvorrichtung (12), mit einem Stößel (24) und mindestens einer Antriebsvorrichtung (10) zum Antreiben des Stößels (24) nach einem der Ansprüche 1 bis 13.
- Modulares Pressensystem zum Bearbeiten von Werkstücken mit einer Mehrzahl von Pressenmodulen nach Anspruch 14.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012110207 | 2012-10-25 | ||
| PCT/EP2013/064298 WO2014063841A1 (de) | 2012-10-25 | 2013-07-05 | Antriebsvorrichtung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2911871A1 EP2911871A1 (de) | 2015-09-02 |
| EP2911871B1 true EP2911871B1 (de) | 2017-03-29 |
Family
ID=48783218
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13736530.0A Active EP2911871B1 (de) | 2012-10-25 | 2013-07-05 | Antriebsvorrichtung |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP2911871B1 (de) |
| JP (1) | JP6133429B2 (de) |
| WO (1) | WO2014063841A1 (de) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102014109144B4 (de) | 2014-06-30 | 2021-12-30 | Modus One Gmbh | Verbesserte C-Gestell-Presse |
| AT517264B1 (de) * | 2015-05-29 | 2018-04-15 | Andritz Ag Maschf | Vorrichtung zum Verdichten von gestapelten Blättern oder Scheiben aus Zellstoff |
| CN107416721B (zh) * | 2017-04-13 | 2023-04-14 | 上海江南制药机械有限公司 | 一种高压支撑平稳升降机构 |
| CN110030349A (zh) * | 2019-05-13 | 2019-07-19 | 常州轻工职业技术学院 | 一种四杆三级串联力放大机构 |
| CN110370704A (zh) * | 2019-07-22 | 2019-10-25 | 江苏扬力数控机床有限公司 | 一种基于连杆机构大吨位全电伺服折弯机 |
| CN112661054B (zh) * | 2020-12-29 | 2025-03-14 | 苏州华日金菱机械有限公司 | 一种高抗反作用力上下机构 |
| CN115783932B (zh) * | 2022-11-18 | 2025-07-04 | 日立电梯(中国)有限公司 | 一种电梯安全钳提拉装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CS148900B1 (de) * | 1970-06-10 | 1973-05-24 | ||
| FR2486451A1 (fr) * | 1980-07-08 | 1982-01-15 | Forichon Gaston | Presse a genouillere |
| JPS58103996A (ja) * | 1981-12-17 | 1983-06-21 | Aida Eng Ltd | C形フレ−ムプレス |
| JPH07108400A (ja) * | 1993-10-13 | 1995-04-25 | Amino:Kk | 高速リンク式油圧プレス装置 |
| JPH10249590A (ja) * | 1997-03-11 | 1998-09-22 | Kawasaki Yukou Kk | サーボモータ駆動のリンクモーションプレスおよびそ のプレス制御方法 |
| JPH11129096A (ja) * | 1997-10-28 | 1999-05-18 | Ishikawajima Harima Heavy Ind Co Ltd | トランスファプレス |
| DE19918700A1 (de) * | 1999-04-26 | 2000-11-02 | Mueller Weingarten Maschf | Hydromechanischer Pressenantrieb |
| DE19935657A1 (de) * | 1999-07-29 | 2001-02-01 | Schuler Pressen Gmbh & Co | Presse mit Auswerfereinrichtung für unterschiedliche Auswerferhübe |
| JP3857134B2 (ja) * | 2001-12-28 | 2006-12-13 | 旭精機工業株式会社 | プレス機械 |
| JP2004034057A (ja) * | 2002-07-01 | 2004-02-05 | Morita & Co:Kk | プレス機 |
| DE202006004470U1 (de) * | 2006-03-21 | 2006-06-14 | Schnupp, Konrad | Presshärtepresse |
| DE102009045543B4 (de) * | 2009-09-15 | 2020-07-09 | Rudholzer Gmbh | Thermoformanlage und Antriebseinheit sowie ein Verfahren zum Betreiben der Thermoformanlage |
-
2013
- 2013-07-05 WO PCT/EP2013/064298 patent/WO2014063841A1/de not_active Ceased
- 2013-07-05 EP EP13736530.0A patent/EP2911871B1/de active Active
- 2013-07-05 JP JP2015538335A patent/JP6133429B2/ja not_active Expired - Fee Related
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2014063841A1 (de) | 2014-05-01 |
| EP2911871A1 (de) | 2015-09-02 |
| JP6133429B2 (ja) | 2017-05-24 |
| JP2015533656A (ja) | 2015-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2911871B1 (de) | Antriebsvorrichtung | |
| EP2480405B1 (de) | Vorgespannter hydraulischer antrieb mit drehzahlvariabler pumpe | |
| WO2009156199A1 (de) | Pressendirektantrieb | |
| EP2008799A1 (de) | Stanzpresse | |
| AT509239A1 (de) | Antriebsvorrichtung für eine biegepresse | |
| EP1247599A1 (de) | Antriebseinrichtung für ein Einpresswerkzeug | |
| WO2005115718A1 (de) | Schliesseinheit mit doppelkurbelantrieb | |
| EP2780591A2 (de) | Axialkolbenmaschine mit veränderbarem schluckvolumen und hydraulikantriebsstrang mit einer axialkolbenmaschine | |
| DE102011113624B4 (de) | Modulares Antriebssystem für eine Umformmaschine | |
| DE102009055739B4 (de) | Umformmaschine, insbesondere Servopresse | |
| EP2008800A1 (de) | Antriebseinrichtung für einen Press-, Stanz- oder Umformautomaten | |
| EP0207184A1 (de) | Schwenkscheiben-Reibgetriebe | |
| EP3293417A1 (de) | Drehantriebseinrichtung mit lastabhängiger bremse | |
| EP1086802A2 (de) | Presse mit Exzenterkurbelbetrieb für Oberstempeleinheit und Betriebsverfahren | |
| CH695990A5 (de) | Pressmaschine, insbesondere Gelenkpresse. | |
| EP2844456A1 (de) | Pulverpresse | |
| DE10344071B4 (de) | Hydrostatische Verstelleinheit mit Schrägscheibe und einem Servosystem mit einer Federanordnung | |
| DE102014210675A1 (de) | Betätigungseinrichtung mit lastabhängiger Übersetzung | |
| AT406648B (de) | Schmiedemaschine | |
| EP2529922B1 (de) | Antriebseinrichtung für einen Press-, Stanz- oder Umformautomaten | |
| DE102009043729A1 (de) | Verfahren zum Bewegen einer Bearbeitungseinheit einer Maschine | |
| DE102010012343A1 (de) | Umformmaschine mit Pendelhubverstellung | |
| DE1684037C3 (de) | Beschickungswagen für zur Herstellung keramischer und feuerfester Gegenstände dienende Pressen mit korn- oder pulverförmigen Materialien | |
| DE102015113660B4 (de) | Pressenantrieb | |
| EP2497632B1 (de) | Antriebseinheit für einen Stanzautomat oder eine Presse |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20150422 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160629 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTC | Intention to grant announced (deleted) | ||
| INTG | Intention to grant announced |
Effective date: 20161013 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 879331 Country of ref document: AT Kind code of ref document: T Effective date: 20170415 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502013006810 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170630 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170629 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170629 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170731 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170729 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IE Payment date: 20170727 Year of fee payment: 5 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502013006810 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 26N | No opposition filed |
Effective date: 20180103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170731 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170705 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 502013006810 Country of ref document: DE Owner name: MODUS ONE GMBH, DE Free format text: FORMER OWNER: MODUS ONE GMBH, 71679 ASPERG, DE Ref country code: DE Ref legal event code: R082 Ref document number: 502013006810 Country of ref document: DE Representative=s name: WITTE, WELLER & PARTNER PATENTANWAELTE MBB, DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20130705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20210722 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20220721 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20220720 Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 879331 Country of ref document: AT Kind code of ref document: T Effective date: 20220705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220705 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20230705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230705 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230731 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250730 Year of fee payment: 13 |