EP2897866B1 - Strapping device having a pivotable rocker - Google Patents
Strapping device having a pivotable rocker Download PDFInfo
- Publication number
- EP2897866B1 EP2897866B1 EP13805503.3A EP13805503A EP2897866B1 EP 2897866 B1 EP2897866 B1 EP 2897866B1 EP 13805503 A EP13805503 A EP 13805503A EP 2897866 B1 EP2897866 B1 EP 2897866B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- tensioning
- wheel
- strap
- rocker
- strapping device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims description 42
- 238000003466 welding Methods 0.000 claims description 30
- 230000005540 biological transmission Effects 0.000 claims description 27
- 238000003825 pressing Methods 0.000 claims description 21
- 230000000903 blocking effect Effects 0.000 claims description 8
- 230000009471 action Effects 0.000 claims description 2
- 238000010438 heat treatment Methods 0.000 claims description 2
- 230000008569 process Effects 0.000 description 37
- 238000005520 cutting process Methods 0.000 description 8
- 239000004033 plastic Substances 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 6
- 230000001419 dependent effect Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 3
- 238000011144 upstream manufacturing Methods 0.000 description 3
- 241001295925 Gegenes Species 0.000 description 2
- 239000004743 Polypropylene Substances 0.000 description 2
- 239000000155 melt Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 229920000728 polyester Polymers 0.000 description 2
- 229920001155 polypropylene Polymers 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- -1 polypropylene Polymers 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000005070 ripening Effects 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B13/00—Bundling articles
- B65B13/18—Details of, or auxiliary devices used in, bundling machines or bundling tools
- B65B13/22—Means for controlling tension of binding means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B13/00—Bundling articles
- B65B13/02—Applying and securing binding material around articles or groups of articles, e.g. using strings, wires, strips, bands or tapes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B13/00—Bundling articles
- B65B13/02—Applying and securing binding material around articles or groups of articles, e.g. using strings, wires, strips, bands or tapes
- B65B13/025—Hand-held tools
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B13/00—Bundling articles
- B65B13/18—Details of, or auxiliary devices used in, bundling machines or bundling tools
- B65B13/185—Details of tools
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B13/00—Bundling articles
- B65B13/18—Details of, or auxiliary devices used in, bundling machines or bundling tools
- B65B13/185—Details of tools
- B65B13/187—Motor means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B13/00—Bundling articles
- B65B13/18—Details of, or auxiliary devices used in, bundling machines or bundling tools
- B65B13/24—Securing ends of binding material
- B65B13/32—Securing ends of binding material by welding, soldering, or heat-sealing; by applying adhesive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B13/00—Bundling articles
- B65B13/18—Details of, or auxiliary devices used in, bundling machines or bundling tools
- B65B13/24—Securing ends of binding material
- B65B13/32—Securing ends of binding material by welding, soldering, or heat-sealing; by applying adhesive
- B65B13/322—Friction welding
Definitions
- the invention relates to a strapping device for strapping packaged goods with a strapping tape, which has a tensioning device for applying a tape tension to a loop of a strapping tape, the tensioning device being provided with a motor-driven tensioning wheel that can be rotated around a tensioning axis and is provided for engaging the strapping tape , the tensioning device further comprises a tensioning plate, with provision being made during a tensioning process carried out by the tensioning device that a single or multi-layer section of the strap is located between the tensioning wheel and the tensioning plate and is in contact with both the tensioning wheel and the tensioning plate, furthermore the clamping plate is arranged on a rocker pivotable by motor about a rocker axis in order to either increase or decrease a distance between the clamping wheel and the clamping plate by a pivoting movement of the rocker, as well as a connecting device for generating a d extraordinary connection, in particular a welded connection, at two superimposed areas of the loop of the strapping band by means of a
- Such strapping devices are used for strapping packaged goods with a plastic strap.
- a loop of the respective plastic strap is placed around the packaged goods.
- the plastic tape is pulled off a supply roll.
- the end area of the tape overlaps with a section of the tape loop.
- the strapping device is now placed on this two-layer area of the strap, the strap is clamped in the strapping device, strap tension is applied to the strap loop by means of the tensioning device, a closure is created by friction welding on the loop between the loaded strap layers.
- a friction shoe moving in an oscillating manner is used to press the belt in the area of two ends of the belt loop.
- the pressure and the heat generated by the movement melts what is usually plastic Tape locally for a short time. This creates a permanent connection between the two layers of tape that can at most be released again with great force. Thereafter or approximately at the same time, the loop is separated from the supply roll. The respective packaged goods are strapped as a result.
- Strapping devices of the generic type are intended for mobile use, in which the devices should be carried by a user to the respective place of use and there should not be dependent on the use of externally supplied supply energy.
- the energy required for the intended use of such strapping devices for tensioning a strapping band around any packaged goods and for creating a seal is usually provided by an electric accumulator or by compressed air in previously known strapping devices. This energy is used to generate the strap tension applied to the strap by means of the tensioning device and a closure on the strapping strap.
- Strapping devices of the generic type are also intended to connect exclusively weldable plastic straps to one another.
- a low weight is of particular importance in order to put as little physical strain as possible on the users of the strapping device when using the device.
- the weight should be distributed as evenly as possible over the entire strapping device, in particular in order to avoid concentration of the weight in the head area of the strapping device. Such a concentration leads to unfavorable handling properties of the device.
- the most ergonomic and user-friendly handling of the strapping device is always aimed for. In particular, the possibility of operating errors and malfunctions should be as low as possible.
- slippage can prevent the belt tension values to be achieved from being reached.
- slippage can also lead to the tensioning process and thus the entire strapping process extended in time.
- slippage also means that the number of straps that can be achieved with one charge of the accumulator is reduced.
- slip also means that the belt tension value to be achieved may not be achieved and the belt is therefore not sufficiently tensioned, which can represent a safety risk.
- the tensioning wheel is usually provided with teeth and is pressed onto the tensioning plate with a pressure force.
- the pressing force can result from a spring with which the rocker with the tensioning wheel arranged on it presses against the band and the tensioning plate arranged below.
- these solutions are not particularly satisfactory when higher belt tensions are to be generated, since - as has been shown - this does not allow slip during the tensioning process to be prevented with sufficient certainty.
- a rocker arm assembly of a strapping machine comprising: a rocker arm comprising: a fulcrum end, a swing end, and a seat formed on the rocker arm located adjacent to the swing end.
- the invention is therefore based on the object of creating a generic, in particular a mobile, strapping device of the type mentioned at the beginning with high functional reliability, in which the intended strap tensions can be applied to the strap safely and with as little slip as possible.
- a drive movement is carried out by means of a transmission means of the strapping device during the duration of the tensioning process swiveling rocker is transmitted, the Drive movement is provided for exerting a torque on the rocker.
- the torque exerted on the rocker can be used to increase the pressing force of the tensioning device against the strapping band.
- the torque exerted on the rocker by transmission means can originate from a motor, the drive torque of which increases the pressing force of the rocker against the band in the course of the tensioning process.
- the motor-related increase takes place in such a way that it occurs primarily during or after an increase in the belt tension. It is advantageous here if a motor is used to generate the motor torque for the rocker, which also performs other drive movements. It is particularly favorable here if the motor and its drive movement are used, with which the tensioning wheel is also driven. On the one hand, a further motor can thereby be avoided, but the function according to the invention can still be exercised. On the other hand, the motor torque, which usually rises when the belt tension increases, can also be used to increase the pressing force. In a structurally particularly simple manner, this allows the rocker to be pressed against the band in a variable, voltage-dependent manner. The latter can preferably take place proportionally to the respectively applied belt tension.
- a torque is exerted and transmitted on the rocker that is based on a force exerted on the tensioning device by the band at an engagement point of the band with the tensioning device.
- This force the reaction of the tensioning force applied to the belt by the driven tensioning wheel, is picked up at a suitable point and transmitted to the rocker with a transmission device.
- the belt tensioning force acting on the tensioning wheel is used on the tensioning wheel itself. This uses the momentary torque acting on the tensioning wheel, which is introduced from the tensioning wheel into the transmission means of the tensioning device and is transmitted by these to the rocker.
- the motorized drive movement for the tensioning device is also used, at least indirectly as a reaction, to use the rotational movement of the tensioning wheel driven by the motor and a pivoting movement of the rocker during the tensioning process, one of the with the strapping engaged standing tensioning wheel derived torque by means of transmission means in the Rocker can be introduced in order to increase a pressing force of the tensioning device against the band.
- a transmission of the tensioning device with which a motorized drive movement for the tensioning wheel is reduced or translated, can be wholly or partially part of the transmission means with which the force acting on the tensioning wheel and resulting from the belt tension from the belt the rocker is transferred.
- means are provided for the band tension-dependent variable pressing of the tensioning wheel onto the strapping band.
- the tensioning device is pressed against the strapping in a variable manner depending on the tension of the tape.
- the belt tension generated by the tensioning process is thus used to advantageously increase the pressure of the tensioning wheel on the belt with steadily increasing belt tension . Slippage of the tensioning wheel during the tensioning process can be counteracted. With increasing belt tension, the contact pressure of the tensioning wheel on the belt and the tensioning plate also increases.
- the invention enables a high pressure to be exerted on the belt when the belt tension is already high and the risk of slippage between the tensioning wheel and the belt is also particularly high when attempting to further increase the belt tension.
- the pressure force which preferably increases automatically, i.e. without manual intervention, can counteract the increasing risk of slippage and thus ensure functional reliability and a fast strapping process even with high strap tensions. Since the reaction of the strapping tape to the action, namely the applied tape tension, as well as transmission means are used which are derived from the tensioning device, in particular from the tensioning wheel, and transmitted to the rocker, no intervention by an operator is required to achieve the effect according to the invention, the effect according to the invention is advantageously achieved automatically in the strapping device.
- the transmission means which advantageously represent an operative connection from the tensioning wheel to the rocker, can comprise a pivotable mounting of the rocker at least during the tensioning process and a rotatably or rotatably mounted gear element which is operatively connected to the tensioning wheel during the tensioning process .
- the reaction force of the band is preferably used as torque and is introduced into the rotatable or rotatable gear element, for example a planet carrier of a planetary gear.
- the rotatable or rotatable gear element should be supported against the rotary or rotational movement on a support element.
- the reaction force of the tensioning wheel can then be introduced into the rocker via or due to the support, whereby an additional torque acts on the rocker, which can be used to increase the pressing force of the rocker against the strapping.
- the transmission means can advantageously be wholly or partially a component of the tensioning gear, with which a motorized drive movement or a drive movement originating from some other energy supply is directed to the tensioning wheel at a suitable speed.
- motorized drive movements with identical directions of rotation of only one motor can be used not only for driving the tensioning wheel when tensioning the strapping but also for lifting the rocker.
- the belt tension-dependent variable pressing of the tensioning wheel onto the belt to be tensioned can also be carried out with the same drive movement. The dependency is provided in such a way that as the belt tension increases, the contact pressure exerted on the belt by the tensioning wheel also increases. Since the risk of slippage between the tensioning wheel and the belt increases with increasing belt tension, the risk of slippage can be counteracted by increasing the contact pressure.
- the motor drive movement when tensioning the strap can preferably be used in such a way that, during the tensioning process of the strapping tape, one of the strapping bands is transferred to the tensioning wheel by means of the tensioning wheel engaging the strapping tape and rotating against a strap tension acting counterforce is used to increase the contact pressure of the tensioning wheel tensioning wheel in the direction of the clamping plate.
- a force resulting from the belt tension and acting in a gear mechanism, with which a drive movement is transmitted to the tensioning wheel is to be made possible with little structural effort and ease of use.
- a solution for this further aspect of the invention, which can be significant in combination with the subject matter of claim 1, is described in claim 8. This thus relates to a locking device for use in a strapping device, with which a rotatable wheel can be clamped which is provided for transmitting a drive movement, in particular a gear wheel of a tensioning device of the strapping device.
- the locking device should have at least one clamping body which can be pivoted about a pivot axis and is arranged at a distance from the wheel, which can be pivoted from a release position to a locking position in which it - preferably with part of an arcuate contact surface - abuts against a substantially flat, i.e. free of form-locking element , Circumferential clamping surface of the wheel arrives, wherein the clamping body has a pivot radius which is greater than a distance between the pivot axis of the clamping body and the peripheral clamping surface of the wheel, and the direction of rotation of the clamping body around the pivot axis when moving from the release position to a clamping position in opposite directions of rotation such as the wheel to be clamped runs.
- locking of rotating gear wheels can be achieved in a structurally simple manner and in a very functionally reliable manner.
- the locking in the direction of rotation of the wheel can be maintained with little effort.
- the clamping force of the clamping body even increases automatically if an attempt is made to turn the wheel further by increasing the torque.
- the locking device can be used to advantage, in particular, for releasably locking a wheel of a gear that belongs to a gear with which a drive movement is to be transmitted to a tensioning wheel of the tensioning device of a strapping device.
- it can be provided in particular to clamp a wheel of a planetary gear, with which the drive movement is to be transmitted to the tensioning wheel.
- one of at least two output directions of the transmission can preferably be determined, in particular an output direction of the transmission on the tensioning wheel, so that the belt can be tensioned,
- the belt tension acting on the tensioning wheel and the gear is at least partially, preferably completely, relieved. Since with such locking devices comparatively low release forces are required to release the clamping even at high strap tension values, the invention results in particularly functionally reliable and easy-to-use strapping devices.
- the low operating or actuation forces also make it possible to dispense with a rocker lever, with which high torques were previously generated in previously known strapping devices for lifting the rocker from the tensioned strap. Instead of a long rocker lever, a button or button can now be used, with which the tension-releasing process takes place.
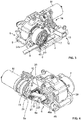
- the exclusively hand-operated strapping device 1 shown has a housing 2 which surrounds the mechanism of the strapping device and on which a handle 3 for handling the device is formed.
- the strapping device is also provided with a base plate 4, the underside of which is provided for arrangement on an object to be packaged. All functional units of the strapping device 1 are fastened on the base plate 4 and on the carrier of the strapping device (not shown in detail) which is connected to the base plate.
- a plastic tape B for example made of polypropylene (PP) or polyester (PET), which was previously placed around the object to be packaged, can be tensioned by means of a tensioning device 6 of the strapping device.
- the tensioning device has a tensioning wheel 7 with which the band B can be gripped for a tensioning process.
- the tensioning wheel 7 is arranged on a pivotable rocker 8 which can be pivoted about a rocker pivot axis 8a.
- the tensioning wheel 7 can be removed from the tensioning plate 9 and pivoted back into its starting position, whereby the tape located between the tensioning wheel 7 and the tensioning plate 9 is released for removal.
- the two layers can then be welded in a manner known per se by means of the friction welding device 12 of the strapping device at a point on the tape loop at which two layers of the tape lie one above the other. This allows the tape loop to be closed permanently.
- the friction welding and cutting device 12 is driven by the same only one motor M of the strapping device, with which all other motor-driven movements are also carried out.
- a freewheel not shown in detail, which causes the drive movement in the respective drive direction of rotation to the corresponding functional unit of the Strapping device is transmitted and no transmission takes place in the respective other drive direction of rotation of the motor provided for this purpose.
- the friction welding device 12 is provided with a welding shoe 13, shown only in a highly schematic manner, which is transferred by means of a transfer device 14 from a rest position at a distance from the band to a welding position in which the welding shoe is pressed against the band.
- the welding shoe that is pressed onto the strapping band by mechanical pressure and the simultaneous oscillating movement of the welding shoe at a predetermined frequency melts the two layers of the strapping band.
- the locally plasticized or melted areas of the band B flow into one another and after the band B has cooled down, a connection is created between the two band layers. If necessary, the band loop can then be separated from a supply roll of the band by means of a cutting device, not shown in detail, of the strapping device 1.
- the infeed of the tensioning wheel 7 in the direction of the tensioning plate 9, the rotary drive of the tensioning wheel 7 around the tensioning axis 6a, the lifting of the tensioning wheel from the tensioning plate, the infeed of the friction welding device 12 by means of the transfer device 14 of the friction welding device 12 as well as the use of the friction welding device 12 per se and the actuation of the cutting device are carried out using only one common electric motor M, the provides a drive movement for each of these components of the strapping device.
- an exchangeable and, in particular, removable accumulator 15 which is used to store electrical energy, is arranged on the strapping tool.
- the supply of other external auxiliary energy, such as compressed air or other electricity, can be provided, but is carried out in the strapping device according to FIGS Fig. 1 and 2 Not.
- Fig. 4 it is provided in the strapping device to tap its drive movement either for the tensioning device 6 or for the friction welding device 12 at two points on the drive shaft of the motor M.
- the motor M can be operated in either of the two directions of rotation.
- the transfer of the drive movement to the clamping device 6 or to the friction welding device 12 is changed automatically by a freewheel arranged on the drive shaft of the motor M (and not shown in detail) depending on the direction of rotation of the drive shaft of the motor.
- the drive movement is transmitted to the clamping device 6 in one direction of rotation of the drive shaft. Because of the freewheeling mechanism, the friction welding device 12 does not experience any drive movement. In the other direction of rotation, the clamping device 6 is without drive movement and the friction welding device 12 is driven. Any manual switching operations are not required to change the direction of transmission of the motorized drive movement.
- Such freewheels are already known in connection with strapping devices, which is why they will not be discussed in more detail.
- the motorized transmission of the drive movement to the friction welding device 12 and transfer device 14 takes place by suitable means.
- This can be, for example, a toothed belt drive with an annularly closed toothed belt that is guided over two toothed wheels.
- One of the two gears is arranged on the drive shaft of the electric motor M, the other belongs to a transmission of the friction welding device 12, with which the motorized drive movement of both the transfer device 14 and the welding shoe 13 of the Reibschwelss adopted 12 moved.
- the welding shoe which is pressed onto two superimposed layers of the strapping band, can thereby be set in an oscillating movement with a predetermined frequency and amplitude, with which the two band layers are locally melted in the area of the welding shoe and then welded to one another through the subsequent cooling.
- a bevel gear 19 On the drive shaft of the motor, seen from the motor M, behind the toothed belt drive to the welding device, there is a bevel gear 19, which also belongs to a bevel gear of the clamping device, as does a second bevel gear 20 with which it meshes.
- a first gear 21 of a further toothed belt drive 22 On the same shaft on which the second bevel gear 20 is arranged there is also a first gear 21 of a further toothed belt drive 22, which is also guided via a second gear 23.
- the first gear 21 of the toothed belt drive 22 is arranged on the shaft 24 in a rotationally fixed manner.
- the rocker 8 of the strapping device is pushed onto the other end of the shaft 24 and is part of the tensioning device 6 and carries the tensioning wheel 7 as well as a gear upstream of the tensioning wheel 7, here a planetary gear 26, for which purpose suitable bearings can be provided on the rocker 8 .
- the rocker 8 is pushed onto the shaft 24 in such a way that it is arranged and supported so that it can pivot about the longitudinal axis of the shaft 8.
- the longitudinal axis of the shaft 24 is thus at the same time the rocker pivot axis 8a about which the rocker 8 can be pivoted.
- the planetary gear 26 can be designed as a single or multi-stage planetary gear, in particular as a two- or three-stage planetary gear.
- An input-side externally toothed sun gear 30 belonging to the planetary gear 26 projects from an end face of the gear wheel 23 facing the tensioning wheel 7, the axis of rotation of which is identical to the axis of rotation 6a of the input-side gear wheel 23.
- the sun gear 30 is passed through a ring gear 27 and through a central recess of a planet carrier 25, which are also part of the planetary gear 26.
- the planet carrier 25 Seen from the input side of the planetary gear, the planet carrier 25 is on the axis of the planetary gear 26, the corresponding to the clamping axis 6a, arranged behind the ring gear 27.
- the planet carrier could also be designed in such a way that it represents a clamping, coupling or spur gear.
- the ring gear 27 has on its outer circumference a cam 27c which is in engagement with a support 46 fastened to the base plate 4 of the strapping device.
- the internally toothed ring gear 27 is supported here in such a way that the cam 27c can execute slight relative movements within its engagement in the support 46, for example in a recess 46a of the support.
- the ring gear 27 also has an annular shoulder 27a on which a roller bearing 28 for supporting the planetary gear 26 is arranged.
- the planetary carrier 25 the axis of which is aligned with the clamping axis 6a, is in engagement with its three planetary gears 25b with an internal toothing of the input-side ring gear 27 of the planetary gear 26.
- the planetary gears 25b of the planetary carrier 25 are also in engagement with the sun gear 30, of which one Record drive movement and can transmit to the ring gear 27 and correspondingly reduced. With a rotationally fixed arrangement of the planetary carrier 25, a rotational movement of the sun gear 30 can thus be converted into a rotational movement of the ring gear 27.
- a first clamp 29 of a locking device is designed as a pivotable cam which can be brought into contact with a clamping surface 25a on the outer circumference of the planet carrier 25 or pivoted away from it at a distance.
- the cam is arranged in such a way that when the cam comes into contact with the clamping surface 25a, the clamping effect is further intensified by a rotation of the planetary carrier 25 on the input side in the direction of rotation provided for the planetary carrier 25.
- the cam onto the clamping surface 25a on the basis of a corresponding switching process, the planet carrier 25 can be blocked against rotation.
- the cam 29 can be removed from the clamping surface 25a and the planet carrier 25 can thus be released for rotational movements.
- the switching process can trigger a pivoting movement of the terminal 29 about a switching axis 143, which is triggered by pressing a button 44.
- the sun gear 30 is also arranged in the area of the axis of rotation 31 of a ring gear 32, the non-toothed outer surface 32a of which is assigned to a second clamp 33.
- the axis of rotation 31 is identical to or is aligned with the clamping axis 6a.
- the clamp 33 interacting with the outer surface 32a can in principle be designed in the same way as the first clamp 29 as a switchable cam that can be moved between two end positions, the ring gear 32 being blocked against rotation in one position and for rotational movements in the other position is released.
- an internal toothing of the ring gear 32 is in engagement with three planet gears 34, which are mounted on the end face of the following planet carrier 35 facing the ring gear 32.
- the planet gears 34 of the planet carrier 35 are also in engagement with the sun gear 30 of the input-side gear 23, which protrudes into the ring gear 32.
- the locking device is designed in such a way that one and only one of the wheels 25, 32 is always clamped against rotation and the other wheel 25, 32 is free for rotational movements of the gear 23 and the sun gear 30 either leads to a rotation of the planet carrier 35 about the clamping axis 6a and rotation axis 31 due to a movement of the planet gears 34 in the internal toothing of the ring gear 32. Or the rotation of the sun gear 30 leads, depending on the positions of the locking device, to a rotation of the ring gear 32. If the planet carrier 25 is not clamped by the locking device, the rotating sun gear takes the planet gears 25b with it in such a way that the planet carrier 25 rotates and the ring gear 27 remains stationary.
- the ring gear 32 If, on the other hand, the ring gear 32 is not clamped, a rotation of the sun gear 30 leads to an entrainment of the planet gears 34, which in turn set the ring gear 32 in a rotational movement. Since the resistance to rotation in the further course of the planetary gear 26 towards the tensioning wheel 7 is greater than the torque to be overcome in order to set the ring gear 32 in rotation, the ring gear 32 in particular rotates and the tensioning wheel 7 rotates at least substantially Not.
- a further sun wheel 36 which has planetary gears, is non-rotatably arranged on the latter 41 of another planet carrier 42 meshes.
- a further sun gear 43 directed towards the tensioning wheel 7 and connected in a rotationally fixed manner to the planet carrier 42 is passed through a recess in the further planet carrier 37, which is designed as a ring gear.
- the sun gear 43 is in meshing engagement with the planet gears 38 of the further planet carrier 37 facing the tensioning wheel 7.
- the planet gears 38 of the second planet carrier 37 again mesh with an internal toothing of the tensioning wheel 7 and drive the latter to rotate about the tensioning axis 6a.
- the third planet carrier 37 has on its outer surface a shoulder 37a which can be brought into contact against a stop element 39 by a rotational movement.
- the stop element 39 itself is not fixed on the rocker but on the base plate 4 or some other carrier which does not take part in the pivoting movement of the rocker 8. The stop element 39 is thus stationary with respect to the shoulder 37a.
- the strapping device 1 behaves as follows: After a tape loop with a commercially available plastic strapping tape has been placed around the respective packaged goods, this is inserted into the strap strapping device in the area of the strap end, in which the strap loop is partially double-layered, and the The end of the strap is held in place in the strapping tool with a strap clamp (not shown). A section of the tape B directly adjoining the tape loop is placed in two layers over the tensioning plate 9 of the tensioning device 6.
- the rocker 8 with the tensioning wheel 7 and the upstream gear 26 is here in its upper end position, in which the tensioning wheel 7 is arranged at a distance (with its greatest intended distance) from the clamping plate 9, which results in the largest possible opening gap, which is a allows easy, comfortable and thus also quick insertion of the tape into the tensioning device.
- the rocker is then lowered onto a tensioning plate 9 opposite the tensioning wheel 7 and pressed against the band arranged between the tensioning plate 9 and the tensioning wheel 7.
- Transfer movement of the tensioning wheel as well as the level of the contact pressure exerted by the tensioning wheel on the belt at the beginning of the tensioning process can be generated by one or more pretensioned spring elements 44 (not shown).
- the spring element By pressing a button 10, the spring element can be released and the entire strapping process with its successively executed process sections “tensioning”, “locking production”, “cutting”, releasing the tension from the strap in the area of the tensioning device, and "lifting the rocker” can be triggered, including no further intervention by the operator of the strapping tool has to be carried out.
- the motorized drive movement is transmitted to the tensioning wheel 7.
- the second clamp 33 is now moved into its position in which it presses against the ring gear 32.
- the ring gear 32 is hereby arrested and locked against rotational movements.
- the first terminal 29, however, is still positioned at a distance from the planet carrier 25 on the input side and releases the ring gear 27 for rotational movements.
- the motor drive movement which, due to the intended specific direction of rotation of the motor M, is transmitted via the bevel gear 19, 20, 21 to the second toothed belt drive 22 and thus to the gear 23, arrives from here in the sequence of the gear members mentioned below via the input-side gear 23 , the sun gear 30, the planet gears 34, the sun gear 36, the planet gears 41, the sun gear 43 and via the planet gears 38 on the tensioning wheel 7 Required with a correspondingly high torque - be driven in the predetermined direction of rotation.
- This counterforce acts in the opposite direction of transmission as the motorized drive movement, on all of the Transmission of the drive movement involved gear members of the multi-stage planetary gear. If another type of gear than a single or multi-stage planetary gear is used, the counterforce resulting from the already applied belt tension and introduced into the respective gear via the contact with the tensioning wheel is available for use. This counterforce can be used to improve the process conditions, in particular the functional reliability, even when the belt tensions to be applied are high. In order to use this counterforce for the purpose described below, it would in principle be possible to use each of these gear members for this purpose, in particular to pick up and use the said counterforce on each of these gear members.
- the planet carrier 37 is used for this.
- the planet carrier 37 is supported on the base plate 4 via the stop element 39, whereby the entire tensioning device 6 is pressed onto the belt around the rocker axis 8a in proportion to the resistance force (belt tension).
- the tensioning wheel 7 is thus pressed onto the belt B in proportion to the belt tension.
- the belt tension generated by the tensioning process is used to advantageously increase the pressing force of the tensioning wheel 7 on the belt B as the belt tension increases, which increases the risk of the tensioning wheel "slipping through” or slipping as the belt tension increases 7 can be counteracted during the tensioning process.
- the planet carrier is formed with the engagement element 37a, which interacts with the stationary stop element 39.
- the engagement element which is designed as a cam and is arranged on the outer circumference of the planet carrier and protruding essentially radially from the latter, is supported on the stop element 39.
- the stationary stop element 39 is for this purpose in the area of the head end of the strapping device.
- the stop element 39 is located on one side, namely the head end, the clamping axis 6a and the rocker pivot axis 8a running essentially parallel to it on the other side of the clamping axis 6a.
- the rocker 8, on which the planet carrier 37 is arranged to be rotatable about the clamping axis 6a via a roller bearing, is also at least during the clamping process pivotable, ie not blocked against pivoting movements but released for this.
- the planet carrier 37 can be rotated about the clamping axis 6a during the clamping process.
- the belt tension generated in response to the tensioning process in belt B causes a force on the tensioning wheel 7 that is opposite to the direction of rotation of the tensioning wheel provided during the tensioning process that the planet carrier 37 is pressed with increased force against the belt in the direction of the clamping plate 9.
- This resulting torque is in turn proportional to the resulting pressing force acting on the belt B by the tensioning wheel 7, with which the belt B is pressed by the tensioning wheel 7 against the tensioning plate 9.
- a belt tension increasing from the motorized drive movement on the tensioning wheel 7 is therefore accompanied by an increasing pressing force of the tensioning device on the belt.
- the tape should be able to be removed quickly and without complications from the strapping device.
- a motorized lifting movement of the tensioning wheel 7 out of the tensioning position is provided.
- the button is actuated and as long as the button 10 is actuated, the rocker also remains in the open position, in which a sufficient distance between the clamping plate 9 and the tensioning wheel 7 is created. Releasing button 10 closes the rocker, for example by spring force.
- the operative connection between the electric motor M and the cutting wheel 7 is first released and an operative connection between the electric motor M and the rocker 8 is created.
- This is achieved by switching terminals 29, 33.
- the previously existing clamping of the ring gear 32 is canceled in that the second clamp 33 is removed from the outer surface 32a of the ring gear 32 is removed and this thereby releases the ring gear 32 for rotational movements.
- the first clamp 29 is lowered onto the clamping surface 25a of the planet carrier 25 and brought into clamping contact therewith.
- the planetary carrier 25 on the input side is fixed and locked against a rotational movement about the clamping axis 6a, along which the entire planetary gear is located.
- the tensioning wheel 7 can rotate freely in a drive-free manner and no longer has an operative connection to the electric motor M and to the sun wheel 30, which could transmit a drive movement.
- a drive movement of the electric motor M with the same direction of rotation as during the tensioning process is now used due to the blocking of the input-side planetary carrier 25 of the planetary gear so that the planetary gears 25b of the spur gear 25 drive the input-side ring gear 27 with them during their rotational movement.
- the input-side ring gear 27 thus executes a rotational movement due to the rotating planet gears 25b.
- the contact and support of the ring gear 27 on the support element 46 leads to a pivoting movement of the ring gear 27 about the rocker axis 8a.
- the strapping device is now ready for a subsequent new strapping, which can be done in the same way as the strapping described above.
- the spring element 44 For the subsequent lowering of the rocker 8 after the introduction of a new section of the strapping band B into the strapping device 1, the spring element 44 must be released again, which can be done, for example, via an operable button on the strapping device. It will do this the one before pressed button 10 released.
- the spring force then pivots the rocker 8 in the reverse pivoting direction towards the tensioning plate and clamps the band with an initial pressure force between the tensioning wheel 7 and the tensioning plate 9 for the subsequent tensioning process.
- the pressure force which is variable in the further course of the clamping process, increases as described.
- FIG. 5 to 9 An exemplary embodiment of a strapping device according to the invention is shown. In terms of its external appearance, this can also be the representation of Fig. 1 are equivalent to.
- the basic structure of this embodiment of the strapping device can also correspond to that of the example discussed above. Accordingly, only one motor M is used in this embodiment as well, which has the in Fig. 5 Not shown welding device 12 and separating device is provided on the one hand in one of the two directions of engine rotation and the clamping device 6 on the other hand in the other direction of engine rotation.
- the optional drive of either the welding device and cutting device on the one hand or the clamping device 6 on the other hand takes place via a freewheel and different directions of rotation of the motor M.
- the embodiment also has a pivotable rocker 80 of the clamping device 86 that is motor-driven about a rocker pivot axis 80a.
- a pivotable rocker 80 of the clamping device 86 that is motor-driven about a rocker pivot axis 80a.
- it is not the tensioning wheel 87 but the tensioning plate 89 that is arranged on the pivotable rocker 80, the rocker pivot axis 80a of which runs parallel to the tensioning axis 86a.
- the motorized drive movement with the direction of rotation which is used for rotational movements about the clamping axis 86a, is also used in this exemplary embodiment for the pivoting movement of the rocker 80.
- the rocker pivot axis 80a runs essentially parallel to the tensioning axis 86a, about which the tensioning wheel is rotatably mounted.
- the rotational movement of the motor is transmitted via a bevel gear pair 99, 100 to a planetary gear 106 and passed on from there to the tensioning wheel 87.
- a freewheel 125 arranged on the shaft of an input-side sun gear 110 it is ensured that the input side of the Planetary gear 106 can only rotate in one direction of rotation.
- the planetary gear 106 is provided with gear elements which, as in the example described above, can be optionally locked by means of a locking device comprising two clamps 29, 33, whereby the drive movement can be transmitted either to the tensioning wheel 87 or to the rocker 80.
- the ring gear 107 is released via the locking device, ie the clamp 33 is not in clamping engagement with the ring gear 107.
- the tensioning wheel 87 can thereby rotate freely without an operative connection with the motor M. Any tape tension retroactive from the just preceding tensioning operation from the strapping B onto the tensioning wheel 87 is thereby released by the tensioning wheel 87 and the gear unit 106 connected upstream of the tensioning wheel.
- the spur gear which is designed as a planetary carrier 105 and whose axis of rotation is aligned with the clamping axis 86a, that is to say the axis of rotation of the tensioning wheel 87, is blocked with the clamp 29.
- the motor drive movement transmitted from the bevel gear 100 to the input-side sun gear 110 cannot lead to a rotation of the planet carrier 105 but to rotational movements of the planet gears 105b of the planet carrier 105 due to the releasable rotational locking of the planet carrier 105 made by means of the clamp 29.
- the internal toothing of the ring gear 109 which meshes with these planetary gears 105b, sets the latter in rotation.
- an external toothing 109c of the ring gear 109 is in engagement with an external toothing 150c of a circular arc segment 150 which is arranged in a stationary manner on one end of a connecting shaft 151.
- the connecting axis 151a of the connecting shaft 151 runs parallel to the stationary clamping axis 86a of this exemplary embodiment.
- the ring gear 109 could also be supported on a support element via a cam, in which case either the cam or the support element should neither be attached to the ring gear 109 nor designed to be movable and the other of the two elements should be arranged on the ring gear 109.
- the connecting axis 151a is on one and the rocker pivot axis 80a on the other side of the tensioning axis 86a, the rocker pivot axis 80a being on the side of the head-side end of the strapping device.
- the planet carrier 117 belongs to the drive train which is provided for the drive movement of the tensioning wheel 87.
- the operative connection of this drive train to the motor M is momentarily interrupted due to the switching position of the locking device described above.
- the planet carrier 117 rotates about the clamping axis 86a and takes along a driver 80c of the rocker 80 with a cam 117a arranged on its outer circumferential surface.
- the rocker 80 which is arcuate in relation to a plan view, rotates as a result and is opened.
- the rocker 80 which is rotatably mounted about the rocker axis 80a and has approximately the shape of a curved section, is arranged with its lower free end below the tensioning wheel 87, so that the tensioning plate 89 arranged in the area of the free end of the rocker 80 are also arranged directly below the tensioning wheel 87 can.
- the clamping plate 89 In order to arrange the clamping plate 89 at a distance from the tensioning wheel 87, the previously described motor-driven movement of the rocker 80 in the direction of rotation according to arrow 112 ( Fig. 6 ), by means of which the rocker 80 is opened as described and a distance between the tensioning wheel 87 and the tensioning plate 89 is increased.
- the opening movement can be limited by a stop.
- the motor-driven rocker 80 now allows the tensioned and closed strapping loop to be removed from the strapping device. After the finished strapping has been removed, the end of a new strapping loop can be inserted between the tensioning plate and the tensioning wheel for a subsequent tensioning process. Due to the restoring force of the spring element 124 which was previously tensioned during the opening movement, the rocker 80 can be attached to the The tensioning wheel is brought up and the belt is pressed against the tensioning wheel with the initial pressure required for the tensioning process.
- actuation of a button or other actuating element can be provided, by which the spring force is released to act on the rocker. It can also be a question of releasing the button 10.
- the ring gear 107 is clamped on its outer circumferential surface by means of the clamp 33 to prevent rotational movements.
- the planet carrier 105 is not clamped and can therefore rotate just like the connecting shaft 8.
- the motorized drive movement from the sun gear 30 to the planetary gear 106 arranged on the clamping axle 86a is transmitted through the planet carrier 105 and the ring gear 107 to the planet gears 114 of the second planet carrier 115 and the latter is set in rotation.
- the sun gear which cannot be seen, drives the planetary gears 121 of a further downstream stage of the planetary gear 106.
- the planet carrier 122 of this stage also rotates.
- the sun gear 123 of the last-mentioned stage is passed through the further planet carrier 117 and drives the planet gears 118 of this further stage, which in turn mesh with an internal toothing of the tensioning wheel 87.
- the tensioning wheel 87 is thus driven in the tensioning direction via the single or multi-stage planetary gear 106 and the inserted tape B is tensioned.
- the belt tension creates a drag force acting from the belt B on the rotating tensioning wheel 87 in the form of a restoring torque.
- Their size is variable and proportional to the size of the applied belt tension. This resistance force acts in opposition to the motor drive torque that is present in the transmission elements involved in the transmission of the drive movement.
- the planet carrier 117 is supported on the rocker 80 with a cam 117b, which has the function of a stop.
- the planet carrier 117 which rotates in a suitable direction of rotation due to the motorized drive movement, lies opposite with its cam 117b a driver 80b of the rocker and thereby rotates it in a movement according to arrow 113 ( Fig. 6 ) around the rocker axis 80a against the tensioning wheel. If necessary, a noticeable rotational movement about the rocker axis 80a is not actually carried out, but essentially only increases the torque about the rocker axis 80a. In both cases, however, the pressing force with which the rocker 80 presses the tensioning plate 89 or the belt against the tensioning wheel 87 is increased. This increase is usually not done in a single step.
- the increase in the pressing force of the rocker against the belt which is ultimately due to the motorized drive movement and the already existing belt tension and which occurs through intervention in the tensioning gear 106, is proportional to the force present in the belt and as a resistance against maintaining and against a further increase in belt tension on the belt Point of engagement in the belt, from the belt on the tensioning plate 89 and on the tensioning wheel 87, a resistance or restoring force takes place. As long as the tensioning process increases the belt tension, the resistance force and thus the resulting pressure force also increase.
- the end positions of the rocker 80 which are possible due to the pivotability of the rocker for opening and closing on the one hand and to increase the pressing force on the band on the other hand are shown.
- the clamping plate 89 is in one of the two end positions due to a contact of the cam 117b of the planet carrier 117 with a contour of the driver 80b and a direction of rotation of the planet carrier clockwise (with reference to the illustration of Fig. 8 ) the rocker is rotated counterclockwise around its rocker pivot axis.
- the driver 80b and the cam 117b act like a lever which causes a counterclockwise torque about the rocker pivot axis 80a.
- Fig. 9 shows the end position of the open rocker.
- the planet carrier 117 rotates in comparison to Fig. 8 in the opposite direction of rotation and thereby comes into abutment against the driver 80c of the rocker 80.
- the driver 80c is located in relation to the rocker pivot axis 80a and the other driver 80b on the other side of the rocker pivot axis 80a.
- the driver 80b is located above and the driver 80c below the rocker pivot axis 80a.
- the rocker swivels in the illustration of Fig. 9 clockwise and thereby creates a distance from the tensioning wheel 87.
- Fig. 12 shows a perspective partial view of the clamping device of the embodiment, in which only one of the two clamps is shown.
- the clamp 33 is brought into contact with the flat and in cross-section essentially exactly circular circumferential surface 107b of the ring gear 107.
- Fig. 13 a sectional view through the ring gear 107 and the clamp 33 is shown.
- the ring gear can either be clamped against rotational movements or released again.
- Each of the in the strapping devices according to Fig. 5-9 provided clamps can preferably be designed according to the locking device described here, but conventional locking devices are also possible.
- an at least approximately flat circular or arcuate circumferential surface of the wheel interacts with a pivotable clamping element or clamping body.
- the peripheral surface 107b of the preferred exemplary embodiment shown, which functions as a clamping surface, does not have any latching elements with which a clamping based on a positive engagement of a clamping element in a latching element or a latching recess is provided.
- the clamping element 33 is mounted pivotably about the switching and pivot axis 143, the switching axis 143 of the clamping element 33 running parallel to the axis of rotation of the wheel 107 to be clamped.
- the switching axis 143 runs in the area of one end of the cam-shaped clamping element 33.
- an arcuate contact surface 33a is provided, which is provided for contact with the clamping surface 107b of the wheel to be clamped.
- the clamping element 33 is arranged in relation to the wheel 107 to be clamped in such a way that the contact line of the contact surface 33a is at a distance 155 from its pivot axis 143 which is greater than the distance between the pivot axis 143 and the clamping surface 107b.
- the clamping element 33 pivots from its release position into a clamping position, it already comes into contact with the clamping surface 107b at a point that is in front of a straight line 156 connecting the axis of rotation of the wheel 107 with the pivot axis 143 of the clamping element.
- the contact line is located in front of the (imaginary) connecting line 156.
- the rotation of the wheel 107 is braked and can only move slightly further. Due to a further rotation against the increasing clamping effect, the clamping effect further intensifies and thereby increasing wedging of the clamping element 33 against the wheel 107 Connection line 156 and presses against the clamping surface 107b.
- the wheel 107 is clamped against the cam-shaped clamping element 33. Further movement is no longer possible even with an arbitrarily high torque.
- Fig. 14 the geometric relationships during clamping are shown.
- the connecting line between the axis of rotation 86a of the wheel 107 and the pivot axis 143 is denoted by 156.
- the contact surface (circumference) of the wheel could be smooth or slightly structured.
- the radius of the wheel at the point of contact with the cam is designated as 158 and the pivot radius of the clamping element 33 at the point of contact is designated 155.
- the pivot radius 155 at the contact point forms an angle ⁇ with the connecting line 156
- the radius 158 of the wheel 107 forms an angle ⁇ with the pivot radius 155 (in each case at the contact point).
- the geometric relationships are designed such that in the clamping position in which the wheel 107 is blocked against rotational movements in the intended direction of rotation, the angle ⁇ is at least approximately 155 °.
- the angle ⁇ should advantageously be greater than or equal to 7 °. In the exemplary embodiment it is 9 °. In other embodiments, it can also be selected from a range from 7 ° to 40 °.
- the cam-shaped clamping element is held in position by the spring force of a spring element 159.
- the spring element 159 rests against the clamping element above the switching axis 143 and rotates or holds the clamping element 29 in its clamping position. In order to remove the clamping element from its clamping position, the spring force must be overcome with a switch 160.
- both terminals 29 and 33 can be operated at the same time.
- the spring force can be overcome by pulling or pressing the switch and the ring gear 107 released from the terminal 33 and the planet carrier 105 locked. With the respective other movement of the switch / button, the spring force releases the clamp 29 and the planet carrier 105, while the clamp 33 locks the ring gear 107.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Basic Packing Technique (AREA)
Description
Die Erfindung wird durch die Ansprüche definiert.The invention is defined by the claims.
Die Erfindung betrifft eine Umreifungsvorrichtung zur Umreifung von Packgut mit einem Umreifungsband, die eine Spanneinrichtung zur Aufbringung einer Bandspannung auf eine Schlaufe eines Umreifungsbandes aufweist, wobei die Spanneinrichtung mit einem motorisch rotativ um eine Spannachse antreibbarem Spannrad versehen ist, das zum Eingriff in das Umreifungsband vorgesehen ist, die Spanneinrichtung ferner eine Spannplatte aufweist, wobei während eines von der Spanneinrichtung ausgeführten Spannvorgangs vorgesehen ist, dass ein ein- oder mehrlagiger Abschnitt des Umreifungsbands sich zwischen dem Spannrad und der Spannplatte befindet und sowohl mit dem Spannrad als auch der Spannplatte in Kontakt ist, ferner die Spannplatte auf einer motorisch um eine Wippenachse schwenkbaren Wippe angeordnet ist, um durch eine Schwenkbewegung der Wippe einen Abstand zwischen dem Spannrad und der Spannplatte entweder zu vergrößern oder zu verringern, sowie eine Verbindungseinrichtung zur Erzeugung einer dauerhaften Verbindung, insbesondere eine Schweissverbindung, an zwei übereinander liegenden Bereichen der Schlaufe des Umreifungsbandes mittels eines Verbindungselements, wie einem Schweisselements das zur lokalen Erwärmung des Umreifungsbandes vorgesehen ist, aufweistThe invention relates to a strapping device for strapping packaged goods with a strapping tape, which has a tensioning device for applying a tape tension to a loop of a strapping tape, the tensioning device being provided with a motor-driven tensioning wheel that can be rotated around a tensioning axis and is provided for engaging the strapping tape , the tensioning device further comprises a tensioning plate, with provision being made during a tensioning process carried out by the tensioning device that a single or multi-layer section of the strap is located between the tensioning wheel and the tensioning plate and is in contact with both the tensioning wheel and the tensioning plate, furthermore the clamping plate is arranged on a rocker pivotable by motor about a rocker axis in order to either increase or decrease a distance between the clamping wheel and the clamping plate by a pivoting movement of the rocker, as well as a connecting device for generating a d extraordinary connection, in particular a welded connection, at two superimposed areas of the loop of the strapping band by means of a connecting element, such as a welding element, which is provided for local heating of the strapping band
Derartige Umreifungsvorrichtungen werden zur Umreifung von Packgut mit einem Kunststoffband eingesetzt. Dazu wird um das Packgut eine Schlaufe des jeweiligen Kunststoffbandes gelegt. In der Regel wird das Kunststoffband hierbei von einer Vorratsrolle abgezogen. Nachdem die Schlaufe um das Packgut vollständig gelegt ist, überlappt der Endbereich des Bandes mit einem Abschnitt der Bandschlaufe. An diesen zweilagigen Bereich des Bandes wird nun die Umreifungsvorrichtung angelegt, hierbei das Band in der Umreifungsvorrichtung geklemmt, mittels der Spanneinrichtung auf die Bandschlaufe eine Bandspannung aufgebracht, durch Reibschweissung an der Schlaufe zwischen den belden Bandlagen ein Verschluss erzeugt. Hierbei wird mit einem sich oszillierend bewegenden Reibschuh im Bereich zweier Enden der Bandschlaufe auf das Band gedrückt. Der Druck und die durch die Bewegung entstehende Wärme schmilzt das in der Regel Kunststoff aufweisende Band lokal für kurze Zeit auf. Hierdurch entsteht zwischen den beiden Bandlagen eine dauerhafte und höchstens mit grosser Kraft wieder zu lösende Verbindung zwischen den beiden Bandlagen. Danach oder in etwa gleichzeitig wird die Schlaufe von der Vorratsrolle abgetrennt. Das jeweilige Packgut ist hierdurch umreift.Such strapping devices are used for strapping packaged goods with a plastic strap. For this purpose, a loop of the respective plastic strap is placed around the packaged goods. As a rule, the plastic tape is pulled off a supply roll. After the loop has been completely placed around the packaged goods, the end area of the tape overlaps with a section of the tape loop. The strapping device is now placed on this two-layer area of the strap, the strap is clamped in the strapping device, strap tension is applied to the strap loop by means of the tensioning device, a closure is created by friction welding on the loop between the loaded strap layers. In this case, a friction shoe moving in an oscillating manner is used to press the belt in the area of two ends of the belt loop. The pressure and the heat generated by the movement melts what is usually plastic Tape locally for a short time. This creates a permanent connection between the two layers of tape that can at most be released again with great force. Thereafter or approximately at the same time, the loop is separated from the supply roll. The respective packaged goods are strapped as a result.
Gattungsgemäße Umreifungsvorrichtungen sind für den mobilen Einsatz vorgesehen, bei dem die Geräte von einem Benutzer zum jeweiligen Einsatzort mitgeführt und dort nicht auf den Einsatz von extern zugeführter Versorgungsenergie angewiesen sein sollten. Die für den vorgesehenen Einsatz solcher Umreifungsgeräte erforderliche Energie zum Spannen eines Umreifungsbandes um beliebiges Packgut und zur Verschlusserzeugung wird bei vorbekannten Umreifungsgeräten in der Regel durch einen elektrischen Akkumulator oder durch Druckluft zur Verfügung gestellt. Mit dieser Energie wird die mittels der Spanneinrichtung auf das Band eingebrachte Bandspannung und ein Verschluss am Umreifungsband erzeugt. Gattungsgemässe Umreifungsvorrichtungen sind zudem dazu vorgesehen ausschliesslich verschweissbare Kunststoffbänder miteinander zu verbinden.Strapping devices of the generic type are intended for mobile use, in which the devices should be carried by a user to the respective place of use and there should not be dependent on the use of externally supplied supply energy. The energy required for the intended use of such strapping devices for tensioning a strapping band around any packaged goods and for creating a seal is usually provided by an electric accumulator or by compressed air in previously known strapping devices. This energy is used to generate the strap tension applied to the strap by means of the tensioning device and a closure on the strapping strap. Strapping devices of the generic type are also intended to connect exclusively weldable plastic straps to one another.
Bei mobilen Geräten ist ein geringes Gewicht von besonderer Bedeutung, um die Benutzer der Umreifungsvorrichtung beim Einsatz der Vorrichtung körperlich möglichst wenig zu belasten. Ebenso sollte aus ergonomischen Gründen eine möglichst gleichmäßige Verteilung des Gewichts auf die gesamte Umreifungsvorrichtung vorgesehen sein, insbesondere um eine Konzentration des Gewichts im Kopfbereich der Umreifungsvorrichtung zu vermeiden. Eine solche Konzentration führt zu ungünstigen Handhabungseigenschaften der Vorrichtung. Zudem wird stets eine möglichst ergonomische und bedienfreundliche Handhabung des Umreifungsgeräts angestrebt. Insbesondere sollte die Möglichkeit von Fehlbedienungen und Fehlfunktionen möglichst gering sein.In the case of mobile devices, a low weight is of particular importance in order to put as little physical strain as possible on the users of the strapping device when using the device. Likewise, for ergonomic reasons, the weight should be distributed as evenly as possible over the entire strapping device, in particular in order to avoid concentration of the weight in the head area of the strapping device. Such a concentration leads to unfavorable handling properties of the device. In addition, the most ergonomic and user-friendly handling of the strapping device is always aimed for. In particular, the possibility of operating errors and malfunctions should be as low as possible.
Bei gattungsgemässen Umreifungsvorrichtungen soll ferner, als weiterer Aspekt der Funktionssicherheit, sichergestellt sein, dass auch nach Erreichen von höheren Bandspannungen kein oder höchstens wenig Schlupf zwischen dem Spannrad und dem Umreifungsband stattfindet. Schlupf kann einerseits das Erreichen von zu realisierenden Bandspannungswerten verhindern. Schlupf kann aber auch dazu führen, daß sich der Spannvorgang und damit der gesamte Umreifungsvorgang zeitlich verlängert. Des Weiteren führt Schlupf aufgrund der längeren Einsatzdauer des jeweiligen Umreifungsgeräts pro Umreifung und damit auch der benötigten Energiemenge pro Umreifung auch dazu, dass sich die Anzahl von mit einer Ladung des Akkumulators erzielbaren Umreifungen reduziert. Schliesslich bedeutet Schlupf aber auch, dass möglicherweise der zu erzielende Bandspannungswert nicht erreicht wird und das Band somit nicht ausreichend gespannt ist, was ein Sicherheitsrisiko darstellen kann. Um Schlupf möglichst zu vermeiden oder zumindest zu reduzieren, ist üblicherweise das Spannrad mit Zähnen versehen und wird mit einer Andruckkraft auf die Spannplatte gedrückt. Die Andrückkraft kann hierzu bei vorbekannten Lösungen von einer Feder resultieren, mit der die Wippe mit dem daran angeordneten Spannrad gegen das Band und die darunter angeordnete Spannplatte gedrückt. Diese Lösungen können jedoch insbesondere dann nicht zufriedenstellen, wenn höhere Bandspannungen erzeugt werden sollen, da - wie es sich gezeigt hat - hiermit Schlupf beim Spannvorgang nicht ausreichend sicher verhindert werden kann.In the case of strapping devices of the generic type, it should also be ensured, as a further aspect of functional reliability, that no or at most little slip occurs between the tensioning wheel and the strapping even after higher strap tensions have been reached. On the one hand, slippage can prevent the belt tension values to be achieved from being reached. However, slippage can also lead to the tensioning process and thus the entire strapping process extended in time. Furthermore, due to the longer period of use of the respective strapping device per strapping and thus also the required amount of energy per strapping, slippage also means that the number of straps that can be achieved with one charge of the accumulator is reduced. Ultimately, however, slip also means that the belt tension value to be achieved may not be achieved and the belt is therefore not sufficiently tensioned, which can represent a safety risk. In order to avoid slippage as much as possible, or at least to reduce it, the tensioning wheel is usually provided with teeth and is pressed onto the tensioning plate with a pressure force. For this purpose, in previously known solutions, the pressing force can result from a spring with which the rocker with the tensioning wheel arranged on it presses against the band and the tensioning plate arranged below. However, these solutions are not particularly satisfactory when higher belt tensions are to be generated, since - as has been shown - this does not allow slip during the tensioning process to be prevented with sufficient certainty.
Der Erfindung liegt deshalb die Aufgabe zugrunde, eine gattungsgemässe, insbesondere eine mobile, Umreifungsvorrichtung der eingangs genannten Art mit hoher Funktionssicherheit zu schaffen, bei der die vorgesehenen Bandspannungen sicher und möglichst schlupffrei auf das Band aufgebracht werden können.The invention is therefore based on the object of creating a generic, in particular a mobile, strapping device of the type mentioned at the beginning with high functional reliability, in which the intended strap tensions can be applied to the strap safely and with as little slip as possible.
Diese Aufgabe wird bei einer Umreifungsvorrichtung der eingangs genannten Art erfindungsgemäß dadurch gelöst, dass während der Übertragung der motorischen Antriebsbewegung auf das Spannrad, solange wie das Spannrad mit dem Band in Eingriff ist, mittels einem Übertragungsmittel der Umreifungsvorrichtung eine Antriebsbewegung auf die während der Dauer des Spannvorgangs schwenkbare Wippe übertragen wird, wobei die Antriebsbewegung zur Ausübung eines Drehmoments auf die Wippe vorgesehen ist. Erfindungsgemäss kann das auf die Wippe ausgeübte Drehmoment zur Steigerung der Anpresskraft der Spanneinrichtung gegen das Umreifungsband genutzt werden. In einer konstruktiv einfachen Lösung kann das auf die Wippe von Übertragungsmitteln ausgeübte Drehmoment von einem Motor stammen, dessen Antriebsmoment die Andrückkraft der Wippe gegen das Band im Laufe des Spannvorgangs variabel ist, erhöht. Bevorzugt ist hierbei, wenn die motorisch bedingte Erhöhung derart stattfindet, dass sie vor allem bei oder nach einer Erhöhung der Bandspannung erfolgt. Vorteilhaft ist hierbei, wenn für die Erzeugung des motorischen Drehmoments für die Wippe ein Motor zum Einsatz kommt, der auch andere Antriebsbewegungen ausführt. Besonders günstig ist hierbei, wenn der Motor und dessen Antriebsbewegung genutzt wird, mit dem auch das Spannrad angetrieben wird. Zum einen kann hierdurch ein weiterer Motor vermieden aber trotzdem die erfindungsgemässe Funktion ausgeübt werden. Zum anderen kann das bei steigender Bandspannung üblicherweise auch steigende Motordrehmoment zur Steigerung der Andrückkraft genutzt werden. Dies erlaubt auf konstruktiv besonders einfache Weise ein variables, spannungsabhängiges Andrücken der Wippe gegen das Band. Vorzugsweise kann letzteres proportional zur jeweils anliegenden Bandspannung erfolgen.This object is achieved in a strapping device of the type mentioned according to the invention in that during the transmission of the motor drive movement to the tensioning wheel, as long as the tensioning wheel is in engagement with the band, a drive movement is carried out by means of a transmission means of the strapping device during the duration of the tensioning process swiveling rocker is transmitted, the Drive movement is provided for exerting a torque on the rocker. According to the invention, the torque exerted on the rocker can be used to increase the pressing force of the tensioning device against the strapping band. In a structurally simple solution, the torque exerted on the rocker by transmission means can originate from a motor, the drive torque of which increases the pressing force of the rocker against the band in the course of the tensioning process. It is preferred here if the motor-related increase takes place in such a way that it occurs primarily during or after an increase in the belt tension. It is advantageous here if a motor is used to generate the motor torque for the rocker, which also performs other drive movements. It is particularly favorable here if the motor and its drive movement are used, with which the tensioning wheel is also driven. On the one hand, a further motor can thereby be avoided, but the function according to the invention can still be exercised. On the other hand, the motor torque, which usually rises when the belt tension increases, can also be used to increase the pressing force. In a structurally particularly simple manner, this allows the rocker to be pressed against the band in a variable, voltage-dependent manner. The latter can preferably take place proportionally to the respectively applied belt tension.
Erfindungsgemäss wird ein Drehmoment auf die Wippe ausgeübt und übertragen, das auf einer vom Band an einer Eingriffsstelle des Bands mit der Spanneinrichtung auf die Spanneinrichtung ausgeübten Kraft basiert. Diese Kraft, die eine Reactio, der vom angetriebenen Spannrad auf das Band aufgebrachten Spannkraft ist, wird an einer geeigneten Stelle abgegriffen und mit Übertragungsmittel auf die Wippe übertragen. Um möglichst wenig konstruktiven Aufwand hierbei aufzuwenden, wird die auf das Spannrad wirkende Bandspannkraft am Spannrad selbst genutzt. Dies nutzt als auf das Spannrad jeweils momentan wirkendes Drehmoment, das vom Spannrad aus in Übertragungsmittel der Spanneinrichtung eingeleitet und von diesen auf die Wippe übertragen wird.According to the invention, a torque is exerted and transmitted on the rocker that is based on a force exerted on the tensioning device by the band at an engagement point of the band with the tensioning device. This force, the reaction of the tensioning force applied to the belt by the driven tensioning wheel, is picked up at a suitable point and transmitted to the rocker with a transmission device. In order to use as little construction effort as possible, the belt tensioning force acting on the tensioning wheel is used on the tensioning wheel itself. This uses the momentary torque acting on the tensioning wheel, which is introduced from the tensioning wheel into the transmission means of the tensioning device and is transmitted by these to the rocker.
Gemäss einem bevorzugten Aspekt kann vorgesehen sein, dass die motorische Antriebsbewegung für die Spanneinrichtung, zumindest indirekt als Reactio, auch dazu eingesetzt wird, um unter Nutzung der vom Motor angetriebenen Rotationsbewegung des Spannrads sowie einer Schwenkbeweglichkeit der Wippe während des Spannvorgangs ein von dem mit dem Umreifungsband in Eingriff stehenden Spannrad abgeleitetes Drehmoment mittels Übertragungsmittel in die Wippe einleitbar ist, um eine Anpresskraft der Spanneinrichtung gegen das Band zu erhöhen.According to a preferred aspect, it can be provided that the motorized drive movement for the tensioning device is also used, at least indirectly as a reaction, to use the rotational movement of the tensioning wheel driven by the motor and a pivoting movement of the rocker during the tensioning process, one of the with the strapping engaged standing tensioning wheel derived torque by means of transmission means in the Rocker can be introduced in order to increase a pressing force of the tensioning device against the band.
In einer bevorzugten Ausführungsform der Erfindung kann ein Getriebe der Spanneinrichtung, mit der eine motorische Antriebsbewegung für das Spannrad unter- oder übersetzt wird, ganz oder teilweise Bestandteil der Übertragungsmittel sein, mit denen die am Spannrad wirkende und aus der Bandspannung resultierende Kraft aus dem Band auf die Wippe übertragen wird.In a preferred embodiment of the invention, a transmission of the tensioning device, with which a motorized drive movement for the tensioning wheel is reduced or translated, can be wholly or partially part of the transmission means with which the force acting on the tensioning wheel and resulting from the belt tension from the belt the rocker is transferred.
Gemäss einem weiteren, bevorzugten Aspekt der Erfindung werden Mittel zum bandspannungsabhängigen variablen Anpressen des Spannrads an das Umreifungsband vorgesehen. Es wird somit während der Spannphase ein bandspannungsabhängiges variables Anpressen der Spanneinrichtung gegen das Umreifungsband vorgesehen. Bei besonders vorteilhaften Ausführungsformen der Erfindung wird die durch den Spannvorgang erzeugte Bandspannung somit genutzt, um in vorteilhafter Weise bei stetig ansteigender Bandspannung auch die Andrückkraft des Spannrads auf das Band zu erhöhen, wodurch der an sich bei steigender Bandspannung ebenfalls steigenden Gefahr eines "Durchrutschens" bzw. eines Schlupfs des Spannrads beim Spannvorgang entgegen gewirkt werden kann. Bei steigender Bandspannung steigt somit auch die Anpresskraft des Spannrads auf das Band und die Spannplatte. Die Erfindung ermöglicht in solchen Ausführungsformen somit gerade dann eine hohe Anpresskraft auf das Band auszuüben, wenn die Bandspannung bereits hoch ist und damit bei dem Versuch die Bandspannung weiter zu erhöhen, die Gefahr von Schlupf zwischen dem Spannrad und dem Band ebenfalls besonders hoch ist. Durch die vorzugsweise automatisiert, also ohne manuellen Eingriff, ebenfalls steigende Anpresskraft, kann der steigenden Gefahr von Schlupf entgegen gewirkt werden und damit die Funktionssicherheit sowie ein schnell ablaufender Umreifungsvorgang auch bei hohen Bandspannungen sichergestellt werden. Da hierfür die Reactio des Umreifungsbands auf die Actio, nämlich die eingebrachte Bandspannung, sowie Übertragungsmittel genutzt werden, die von der Spanneinrichtung, insbesondere vom Spannrad, abgeleitet und auf die Wippe übertragen werden, bedarf es zur Erzielung der erfindungsgemässen Wirkung keines Eingriffs durch einen Bediener, die erfindungsgemässe Wirkung wird mit Vorteil in der Umreifungsvorrichtung selbsttätig erzielt.According to a further, preferred aspect of the invention, means are provided for the band tension-dependent variable pressing of the tensioning wheel onto the strapping band. Thus, during the tensioning phase, the tensioning device is pressed against the strapping in a variable manner depending on the tension of the tape. In particularly advantageous embodiments of the invention, the belt tension generated by the tensioning process is thus used to advantageously increase the pressure of the tensioning wheel on the belt with steadily increasing belt tension . Slippage of the tensioning wheel during the tensioning process can be counteracted. With increasing belt tension, the contact pressure of the tensioning wheel on the belt and the tensioning plate also increases. In such embodiments, the invention enables a high pressure to be exerted on the belt when the belt tension is already high and the risk of slippage between the tensioning wheel and the belt is also particularly high when attempting to further increase the belt tension. The pressure force, which preferably increases automatically, i.e. without manual intervention, can counteract the increasing risk of slippage and thus ensure functional reliability and a fast strapping process even with high strap tensions. Since the reaction of the strapping tape to the action, namely the applied tape tension, as well as transmission means are used which are derived from the tensioning device, in particular from the tensioning wheel, and transmitted to the rocker, no intervention by an operator is required to achieve the effect according to the invention, the effect according to the invention is advantageously achieved automatically in the strapping device.
In einer bevorzugten Ausführungsform der Erfindung können die Übertragungsmittel, die mit Vorteil eine Wirkverbindung vom Spannrad zur Wippe darstellen, eine schwenkbare Lagerung der Wippe zumindest während des Spannvorgangs sowie ein dreh- oder rotierbar gelagertes Getriebeelement umfassen, das während des Spannvorgangs mit dem Spannrad in Wirkverbindung steht. Die Reaktionskraft des Bands wird vorzugsweise als Drehmoment genutzt und in das dreh- oder rotierbare Getriebeelement, beispielsweise einen Planetenträger eines Planetengetriebes eingeleitet. Das dreh- oder rotierbare Getriebeelement sollte sich gegen die Dreh- oder Rotationsbewegung an einem Abstützelement abstützen. Die Reaktionskraft des Spannrads kann dann über die bzw. aufgrund der Abstützung in die Wippe eingeleitet werden, wodurch ein zusätzliches Drehmoment auf die Wippe wirkt, das zur Erhöhung der Andrückkraft der Wippe gegen das Umreifungsband genutzt werden kann. Die Übertragungsmittel können mit Vorteil ganz oder teilweise Bestandteil des Spanngetriebes sein, mit dem eine motorische oder aus sonstiger Energiefzufuhr stammende Antriebsbewegung mit geeigneter Drehzahl zum Spannrad geleitet wird.In a preferred embodiment of the invention, the transmission means, which advantageously represent an operative connection from the tensioning wheel to the rocker, can comprise a pivotable mounting of the rocker at least during the tensioning process and a rotatably or rotatably mounted gear element which is operatively connected to the tensioning wheel during the tensioning process . The reaction force of the band is preferably used as torque and is introduced into the rotatable or rotatable gear element, for example a planet carrier of a planetary gear. The rotatable or rotatable gear element should be supported against the rotary or rotational movement on a support element. The reaction force of the tensioning wheel can then be introduced into the rocker via or due to the support, whereby an additional torque acts on the rocker, which can be used to increase the pressing force of the rocker against the strapping. The transmission means can advantageously be wholly or partially a component of the tensioning gear, with which a motorized drive movement or a drive movement originating from some other energy supply is directed to the tensioning wheel at a suitable speed.
In einer besonders bevorzugten Ausführungsform der Erfindung können motorische Antriebsbewegungen mit identischen Drehrichtungen des nur einen Motors, außer für den Antrieb des Spannrads beim Spannen des Umreifungsbands auch für ein Anheben der Wippe genutzt werden. Zusätzlich hierzu kann mit der gleichen Antriebsbewegung auch das bandspannungsabhängige variable Anpressen des Spannrads auf das zu spannende Band vorgenommen werden. Die Abhängigkeit ist hierbei derart vorgesehen, dass bei steigender Bandspannung auch die vom Spannrad ausgeübte Anpresskraft auf das Band steigt. Da bei steigender Bandspannung auch die Gefahr steigt, dass Schlupf zwischen dem Spannrad und dem Band stattfindet, kann mit der Maßnahme eines steigenden Anpressdrucks der Schlupfgefahr entgegengewirkt werden, Besonders bevorzugt ist hierbei wenn die gleiche Motordrehrichtung wie für das Spannen genutzt wird. Die motorische Antriebsbewegung beim Spannen des Bands kann vorzugsweise derart genutzt werden, dass während des Spannvorgangs des Umreifungsbands mittels des in das Umreifungsband eingreifende und gegen eine Bandspannung rotierende Spannrad eine vom Umreifungsband auf das Spannrad einwirkende Gegenkraft genutzt wird, um den Anpressdruck des Spannrads Spannrads in Richtung auf die Spannplatte zu erhöhen.In a particularly preferred embodiment of the invention, motorized drive movements with identical directions of rotation of only one motor can be used not only for driving the tensioning wheel when tensioning the strapping but also for lifting the rocker. In addition to this, the belt tension-dependent variable pressing of the tensioning wheel onto the belt to be tensioned can also be carried out with the same drive movement. The dependency is provided in such a way that as the belt tension increases, the contact pressure exerted on the belt by the tensioning wheel also increases. Since the risk of slippage between the tensioning wheel and the belt increases with increasing belt tension, the risk of slippage can be counteracted by increasing the contact pressure. The motor drive movement when tensioning the strap can preferably be used in such a way that, during the tensioning process of the strapping tape, one of the strapping bands is transferred to the tensioning wheel by means of the tensioning wheel engaging the strapping tape and rotating against a strap tension acting counterforce is used to increase the contact pressure of the tensioning wheel tensioning wheel in the direction of the clamping plate.
Gemäss einem weiteren, bevorzugten Aspekt der Erfindung soll mit geringem konstruktiven Aufwand und bei einfacher Bedienbarkeit ermöglicht werden, eine von der Bandspannung resultierende und in ein Getriebe rückwirkende Kraft gehalten und gelöst werden kann, mit dem eine Antriebsbewegung auf das Spannrad übertragen wird. Eine Lösung für diesen weiteren Aspekt der Erfindung, der in Kombination mit dem Gegenstand von Patentanspruch 1 Bedeutung haben kann, ist in Patentanspruch 8 beschrieben. Dies betrifft somit eine Sperreinrichtung zur Anwendung in einer Umreifungsvorrichtung, mit der ein rotierbares Rad geklemmt werden kann, das zur Übertragung einer Antriebsbewegung vorgesehen ist, insbesondere ein Getrieberad einer Spanneinrichtung der Umreifungsvorrichtung. Die Sperreinrichtung sollte zumindest einen um eine Schwenkachse schwenkbare und mit Abstand zum Rad angeordneten Klemmkörper aufweisen, der von einer Freigabeposition in eine Sperrposition schwenkbar ist, in der er - vorzugsweise mit einem Teil einer bogenförmigen Kontaktfläche - in Anlage gegen eine im wesentlichen ebene, also formschlusselementenfreie, Umfangsklemmfläche des Rads gelangt, wobei der Klemmkörper einen Schwenkradius aufweist, der grösser ist als ein Abstand der Schwenkachse des Klemmkörpers zur Umfangsklemmfläche des Rads, und die Drehrichtung des Klemmkörpers um die Schwenkachse bei der Überführung von der Freigabeposition in eine Klemmposition in entgegen gesetzten Drehsinn wie das zu klemmende Rad verläuft.According to a further, preferred aspect of the invention, a force resulting from the belt tension and acting in a gear mechanism, with which a drive movement is transmitted to the tensioning wheel, is to be made possible with little structural effort and ease of use. A solution for this further aspect of the invention, which can be significant in combination with the subject matter of
Mit einer solchen Sperrvorrichtung können auf konstruktiv einfache Weise sehr funktionssicher Arretierungen von sich drehenden Getrieberädern erreicht werden. Die Arretierung in Drehrichtung des Rads kann mit wenig Kraftaufwand aufrecht erhalten werden. Die Klemmkraft des Klemmkörpers steigt sogar automatisch an, sollte versucht werden, durch Erhöhung des Drehmoments das Rad weiter zu drehen.With such a locking device, locking of rotating gear wheels can be achieved in a structurally simple manner and in a very functionally reliable manner. The locking in the direction of rotation of the wheel can be maintained with little effort. The clamping force of the clamping body even increases automatically if an attempt is made to turn the wheel further by increasing the torque.
Die Sperreinrichtung kann mit Vorteil insbesondere zum lösbaren Sperren eines Rades eines Getriebes genutzt werden, das zu einem Getriebe gehört, mit dem eine Antriebsbewegung auf ein Spannrad der Spanneinrichtung einer Umreifungsvorrichtung übertragen werden soll. Es kann in diesem Zusammenhang insbesondere zur Klemmung eines Rads eines Planetengetriebes vorgesehen sein, mit dem die Antriebsbewegung auf das Spannrad übertragen werden soll. Mit oder zumindest unter Zuhilfenahme einer Klemmung des zu klemmenden Rads kann vorzugsweise eine von zumindest zwei Abtriebsrichtungen des Getriebes bestimmt werden, insbesondere eine Abtriebsrichtung des Getriebes auf das Spannrad, so dass das Band gespannt werden kann,The locking device can be used to advantage, in particular, for releasably locking a wheel of a gear that belongs to a gear with which a drive movement is to be transmitted to a tensioning wheel of the tensioning device of a strapping device. In this context, it can be provided in particular to clamp a wheel of a planetary gear, with which the drive movement is to be transmitted to the tensioning wheel. With or at least with the aid of a clamping of the wheel to be clamped, one of at least two output directions of the transmission can preferably be determined, in particular an output direction of the transmission on the tensioning wheel, so that the belt can be tensioned,
Es kann ferner mit Vorteil vorgesehen sein, dass mit einem Lösen der Klemmung auch die auf das Spannrad und das Getriebe wirkende Bandspannung zumindest teilweise, vorzugsweise vollständig, genommen wird. Da mit derartigen Sperreinrichtungen vergleichsweise geringe Lösekräfte zur Aufhebung der Klemmung selbst bei hohen Bandspannungswerten erforderlich sind, ergeben sich mit der Erfindung besonders funktionssichere und einfach zu bedienende Umreifungsvorrichtungen. Die geringen Bedien- bzw. Betätigungskräfte erlauben es auch auf einen Wippenhebel zu verzichten, mit dem bisher hohe Momente bei vorbekannten Umreifungsvorrichtungen zum Anheben der Wippe vom gespannten Band erzeugt wurden. Anstelle eines langen Wippenhebels kann nun eine Taste oder Taster eingesetzt werden, mit der oder dem der spannungslösende Vorgang erfolgt.It can also be advantageously provided that when the clamping is released, the belt tension acting on the tensioning wheel and the gear is at least partially, preferably completely, relieved. Since with such locking devices comparatively low release forces are required to release the clamping even at high strap tension values, the invention results in particularly functionally reliable and easy-to-use strapping devices. The low operating or actuation forces also make it possible to dispense with a rocker lever, with which high torques were previously generated in previously known strapping devices for lifting the rocker from the tensioned strap. Instead of a long rocker lever, a button or button can now be used, with which the tension-releasing process takes place.
Die Erfindung wird anhand von den Figuren rein schematisch naher erläutert, es zeigen:
- Fig. 1
- eine beispielhafte Umreifungsvorrichtung in einer perspektivischen Darstellung;
- Fig. 2
- eine Explosionsdarstellung der Spanneinrichtung der Umreifungsvorrichtung aus
Fig. 1 zusammen mit dem Motor; - Fig. 3
- eine perspektivische Darstellung der Spann- und der Verschlusseinrichtung der Umreifungsvorrichtung aus
Fig. 1 ; - Fig. 4
- eine weitere perspektivische Darstellung der Spann- und der Verschlusseinrichtung der Umreifungsvorrichtung aus
Fig. 1 ; - Fig. 5
- eine Explosionsdarstellung eines Ausführungsbeispiels der Spanneinrichtung der Umreifungsvorrichtung aus
Fig. 1 zusammen mit dem Motor; - Fig. 6
- eine perspektivische Darstellung der Spann- und der Verschlusseinrichtung der Umreifungsvorrichtung aus
Fig. 1 ; - Fig. 7
- eine weitere perspektivische Darstellung der Spann- und der Verschlusseinrichtung der Umreifungsvorrichtung aus
Fig. 1 ; - Fig. 8
- eine Seitenansicht auf die Spanneinrichtung aus
Fig. 5 , in der sich eine Wippe in einer ersten Schwenkendposition befindet; - Fig. 9
- eine Seitenansicht auf die Spanneinrichtung aus
Fig. 5 , in der sich die Wippe in einer zweiten Schwenkendposition befindet; - Fig. 10
- eine Seitenansicht auf die Spanneinrichtung aus
Fig. 2 , in der sich die Wippe in einer Position mit hohem Andrückkraft gegen eine Spannplatte befindet; - Fig. 11
- eine Seitenansicht auf die Spanneinrichtung aus
Fig. 2 , in der sich die Wippe in einer Position mit im Vergleich zurFig. 10 geringerer Andrückkraft gegen eine Spannplatte befindet; - Fig. 12
- eine perspektivische Teildarstellung der Spann- und der Sperreinrichtung;
- Fig. 13
- eine Schnittdarstellung der Spann- und Sperreinrichtung;
- Fig. 14
- eine Prinzipdarstellung der geometrischen Verhältnisse einer Sperreinrichtung.
- Fig. 1
- an exemplary strapping device in a perspective view;
- Fig. 2
- an exploded view of the tensioning device of the strapping device
Fig. 1 together with the engine; - Fig. 3
- a perspective view of the tensioning and locking device of the strapping device
Fig. 1 ; - Fig. 4
- a further perspective view of the tensioning and locking device of the strapping device
Fig. 1 ; - Fig. 5
- an exploded view of an embodiment of the tensioning device of the strapping device
Fig. 1 together with the engine; - Fig. 6
- a perspective view of the tensioning and locking device of the strapping device
Fig. 1 ; - Fig. 7
- a further perspective view of the tensioning and locking device of the strapping device
Fig. 1 ; - Fig. 8
- a side view of the clamping device
Fig. 5 , in which a rocker is in a first pivot end position; - Fig. 9
- a side view of the clamping device
Fig. 5 in which the rocker is in a second pivot end position; - Fig. 10
- a side view of the clamping device
Fig. 2 in which the rocker is in a position with high pressure against a clamping plate; - Fig. 11
- a side view of the clamping device
Fig. 2 , in which the rocker is in a position with compared toFig. 10 there is less pressing force against a clamping plate; - Fig. 12
- a perspective partial view of the tensioning and locking device;
- Fig. 13
- a sectional view of the tensioning and locking device;
- Fig. 14
- a schematic representation of the geometric relationships of a locking device.
Das in den
Mit dem Umreifungsgerät 1 kann eine in
Im Einsatz der gezeigten Spannvorrichtung befinden sich zwei Lagen des Umreifungsbands zwischen dem Spannrad 7 und der Spannplatte und werden durch das Spannrad 7 gegen die Spannplatte gedrückt. Durch Rotation des Spannrades 7 ist es dann möglich, die Bandschlaufe mit einer für den Verpackungszweck ausreichend hohen Bandspannung zu versehen. Der Vorgang des Spannens und die hierzu in vorteilhafter Weise ausgebildeten Spannvorrichtung und Wippe 8 werden nachfolgend noch näher erläutert.When the tensioning device shown is in use, there are two layers of the strap between the
Anschliessend kann an einer Stelle der Bandschlaufe, an der zwei Lagen des Bandes übereinander liegen, in einer an sich bekannten Weise eine Verschweissung der beiden Lagen mittels der Reibschweisseinrichtung 12 des Umreifungsgeräts erfolgen. Die Bandschlaufe kann hierdurch dauerhaft verschlossen werden. Im hier gezeigten Beispiel wird die Reibschweiss und Trenneinrichtung 12 vom gleichen nur einen Motor M des Umreifungsgeräts angetrieben, mit dem auch alle anderen motorisch angetrieben Bewegungen ausgeführt werden. Hierzu ist in an sich bekannter Weise in der Übertragungsrichtung vom Motor M zu den Stellen, an denen die motorische Antriebsbewegung ein im Detail nicht näher dargestellter Freilauf vorgesehen, durch den bewirkt wird, dass die Antriebsbewegung in die jeweils dafür vorgesehene Antriebsdrehrichtung auf die entsprechende Funktionseinheit des Umreifungsgeräts übertragen wird und in der jeweils dafür vorgesehenen anderen Antriebsdrehrichtung des Motors keine Übertragung erfolgt.The two layers can then be welded in a manner known per se by means of the
Die Reibschweisseinrichtung 12 ist hierfür mit einem lediglich stark schematisiert dargestellten Schweissschuh 13 versehen, der mittels einer Überführungseinrichtung 14 von einer Ruheposition mit Abstand zum Band in eine Schweissposition überführt wird, in welcher der Schweissschuh gegen das Band gedrückt ist. Der hierbei durch mechanischen Druck auf das Umreifungsband gedrückte Schweissschuh und die gleichzeitig erfolgende oszillierende Bewegung des Schweissschuhs mit einer vorbestimmten Frequenz, schmilzt die beiden Lagen des Umreifungsbands an. Die lokal plastifizierten bzw. aufgeschmolzenen Bereiche des Bands B fliessen ineinander und nach einer Abkühlung des Bandes B entsteht dann eine Verbindung zwischen den beiden Bandlagen. Soweit erforderlich, kann dann die Bandschlaufe von einer Vorratsrolle des Bandes mittels einer nicht näher dargestellten Schneideinrichtung des Umreifungsgerätes 1 abgetrennt werden.For this purpose, the
Die Zustellung des Spannrads 7 in Richtung auf die Spannplatte 9, der rotative Antrieb des Spannrads 7 um die Spannachse 6a, das Anheben des Spannrads von der Spannplatte, die Zustellung der Reibschweisseinrichtung 12 mittels der Überführungseinrichtung 14 der Reibschweisseinrichtung 12 als auch der Einsatz der Reibschweisseinrichtung 12 an sich sowie die Betätigung der Schneideinrichtung erfolgen unter Einsatz lediglich nur einem gemeinsamen elektrischen Motors M, der für diese Komponenten des Umreifungsgeräts jeweils eine Antriebsbewegung zur Verfügung stellt. Zur Stromversorgung des Motors M ist am Umreifungsgerät ein austauschbarer und insbesondere zur Aufladung entnehmbarer Akkumulator 15 angeordnet, der zur Speicherung von elektrischer Energie dient. Die Zuführung von anderer äusserer Hilfsenergie, wie beispielsweise Druckluft oder weitere Elektrizität kann vorgesehen sein, erfolgt jedoch beim Umreifungsgerät gemäss den
Wie in
Wie ebenfalls in den
Auf der Antriebswelle des Motors befindet sich vom Motor M aus gesehen hinter dem Zahnriementrieb zur Schweisseinrichtung ein Kegelrad 19, das ebenso zu einem Kegelradgetriebe der Spanneinrichtung gehört, wie ein zweites Kegelrad 20, mit dem es kämmt. Auf der gleichen Welle, auf der das zweite Kegelrad 20 angeordnet ist, befindet sich auch ein erstes Zahnrad 21 eines weiteren Zahnriementriebs 22, der zudem über ein zweites Zahnrad 23 geführt ist. Das erste Zahnrad 21 des Zahnriementriebs 22 ist auf der Welle 24 drehfest angeordnet.On the drive shaft of the motor, seen from the motor M, behind the toothed belt drive to the welding device, there is a
Auf das andere Ende der Welle 24 ist die Wippe 8 des Umreifungsgeräts aufgeschoben, die Bestandteil der Spanneinrichtung 6 ist und das Spannrad 7 als auch ein dem Spannrad 7 vorgeschaltete Getriebe, hier ein Planetengetriebe 26 trägt, wozu an der Wippe 8 geeignete Lagerstellen vorgesehen sein können. Die Wippe 8 ist auf die Welle 24 derart aufgeschoben, dass sie um die Längsachse der Welle 8 schwenkbar angeordnet und gelagert ist. Die Längsachse der Welle 24 ist somit gleichzeitig die Wippenschwenkachse 8a, um die die Wippe 8 schwenkbar ist.The
Das Planetengetriebe 26 kann als ein- oder als mehrstufiges Planetengetriebe, insbesondere als zwei- oder dreistufiges Planetengetriebe, ausgebildet sein. Von einer zum Spannrad 7 gewandten Stirnseite des Zahnrads 23 steht ein zum Planetengetriebe 26 gehörendes eingangsseitiges aussenverzahntes Sonnenrad 30 ab, dessen Drehachse identisch mit der Drehachse 6a des eingangsseitigen Zahnrads 23 ist. Auf einer Welle des Zahnrads 23, an der auch das Sonnenrad 30 ausgebildet ist, ist ein Freilauf 45, der nur eine Drehrichtung des Sonnenrads 30 zulässt, nämlich die Drehrichtung, die für den Antrieb des Spannrads vorgesehen ist. Das Sonnenrad 30 ist durch ein Hohlrad 27 und durch eine zentrische Ausnehmung eines Planetenträgers 25 hindurchgeführt, die ebenfalls Bestandteil des Planetengetriebes 26 sind. Von der Eingangsseite des Planetenrads aus gesehen, ist der Planetenträger 25 auf der Achse des Planetengetriebes 26, die der Spannachse 6a entspricht, hinter dem Hohlrad 27 angeordnet. Der Planetenträger könnte auch so ausgebildet sein, dass es ein Klemm-, Kupplungs- oder Stirnrad darstellt.The
Das Hohlrad 27 weist an seinem äusseren Umfang einen Nocken 27c auf, der in Eingriff mit einem an der Grundplatte 4 der Umreifungsvorrichtung befestigten Abstützung 46 steht. Das innenverzahnte Hohlrad 27 stützt sich hierbei derart ab, dass der Nocken 27c innerhalb seines Eingriffs in die Abstützung 46, beispielsweise in eine Ausnehmung 46a der Abstützung, geringfügige Relativbewegungen ausführen kann. Das Hohlrad 27 weist zudem einen ringförmigen Absatz 27a auf, auf dem ein Wälzlager 28 zur Lagerung des Planetengetriebes 26 angeordnet ist.The
Der Planetenträger 25, dessen Achse mit der Spannachse 6a fluchtet, steht mit seinen drei Planetenrädern 25b im Eingriff mit einer Innenverzahnung des eingangsseitigen Hohlrads 27 des Planetengetriebes 26. Die Planetenräder 25b des Planetenträgers 25 stehen ausserdem mit dem Sonnenrad 30 in Eingriff, von dem sie eine Antriebsbewegung aufnehmen und auf das Hohlrad 27 und entsprechend untersetzt übertragen können. Bei rotationsfester Anordnung des Planetenträgers 25 kann somit eine Rotationsbewegung des Sonnenrads 30 in eine Rotationsbewegung des Hohlrads 27 umgesetzt werden. Es ist eine erste Klemme 29 einer Sperreinrichtung als schwenkbarer Nocken ausgebildet, der mit einer Klemmfläche 25a am äusseren Umfang des Planetenträgers 25 in Kontakt bringbar oder von ihr mit Abstand weggeschwenkt werden kann. Der Nocken ist hierbei so angeordnet, dass bei Kontakt des Nockens mit der Klemmfläche 25a durch eine Rotation des eingangsseitigen Planetenträgers 25 in die für den Planetenträger 25 vorgesehene Drehrichtung die Klemmwirkung weiter verstärkt wird. Durch ein Zustellen des Nockens auf die Klemmfläche 25a aufgrund eines entsprechenden Schaltvorgangs kann der Planetenträger 25 gegen Rotation blockiert werden. Durch ebenfalls einen Schaltvorgang kann der Nocken 29 von der Klemmfläche 25a entfernt und damit der Planetenträger 25 für Rotationsbewegungen freigegeben werden. Der Schaltvorgang kann hierbei eine Schwenkbewegung der Klemme 29 um eine Schaltachse 143 auslösen, der durch Betätigung einer Taste 44 ausgelöst wird.The
Das Sonnenrad 30 ist zudem im Bereich der Rotationsachse 31 eines Hohlrads 32 angeordnet, dessen nicht verzahnte Außenfläche 32a einer zweiten Klemme 33 zugeordnet ist. Die Rotationsachse 31 ist identisch mit bzw. fluchtet mit der Spannachse 6a. Die mit der Aussenfläche 32a zusammenwirkende Klemme 33 kann in prinzipiell gleicher Weise wie die erste Klemme 29 als schaltbarer Nocken ausgebildet sein, der zwischen zwei Endposition bewegt werden kann, wobei in der einen Position das Hohlrad 32 gegen Rotation blockiert und in der anderen Position für Rotationsbewegungen freigegeben ist. Des Weiteren steht eine Innenverzahnung des Hohlrads 32 in Eingriff mit drei Planetenrädern 34, die an der zum Hohlrad 32 gewandten Stirnseite des nachfolgenden Planetenträgers 35 gelagert sind. Die Planetenräder 34 des Planetenträgers 35 stehen außerdem in Eingriff mit dem Sonnenrad 30 des eingangsseitigen Zahnrads 23, das in das Hohlrad 32 hineinragt.The
Die Sperrvorrichtung ist derart ausgelegt, dass stets eines und nur eines der Räder 25, 32 gegen eine Rotation geklemmt und das jeweils andere Rad 25, 32 für Rotationsbewegungen frei ist Es ist somit in Abhängigkeit der Stellungen der Sperrvorrichtungen 29, 33 möglich, dass eine Rotationsbewegung des Zahnrads 23 und des Sonnenrads 30 entweder zu einer Rotation des Planetenträgers 35 um die Spannachse 6a und Rotationsachse 31 aufgrund einer Bewegung der Planetenräder 34 in der Innenverzahnung des Hohlrads 32 führt. Oder die Rotation des Sonnenrads 30 führt in Abhängigkeit der Stellungen der Sperrvorrichtung zu einer Rotation des Hohlrads 32. Ist der Planetenträger 25 nicht durch die Sperreinrichtung geklemmt, nimmt das drehende Sonnenrad die Planetenräder 25b derart mit, dass sich der Planetenträger 25 dreht und das Hohlrad 27 ortsfest verbleibt. Ist hingegen das Hohlrad 32 nicht geklemmt, führt eine Rotation des Sonnenrads 30 zu einer Mitnahme der Planetenräder 34, die wiederum das Hohlrad 32 in eine Rotationsbewegung versetzen. Da der Widerstand gegen Rotation im weiteren Verlauf des Planetengetriebes 26 zum Spannrad 7 hin grösser ist als das zu überwindende Drehmoment, um das Hohlrad 32 in Rotation zu versetzen, dreht sich in diesem Fall vor allem das Hohlrad 32 und das Spannrad 7 rotiert zumindest im wesentlichen nicht.The locking device is designed in such a way that one and only one of the
Auf der anderen, zum Spannrad 7 gewandten, Stirnseite des Planetenträgers 35 ist drehfest an diesem ein weiteres Sonnenrad 36 angeordnet, das mit Planetenrädern 41 eines weiteren Planetenträgers 42 kämmt. Ein zum Spannrad 7 gerichtetes weiteres und mit dem Planetenträger 42 drehfest verbundenes Sonnenrad 43 ist durch eine Ausnehmung des als Hohlrad ausgebildeten weiteren Planetenträgers 37 durchgeführt. Das Sonnenrad 43 steht in kämmenden Eingriff mit zum Spannrad 7 gewandten Planetenrädern 38 des weiteren Planetenträgers 37. Die Planetenräder 38 des zweiten Planetenträgers 37 kämmen wiederum mit einer Innenverzahnung des Spannrads 7 und treiben letzteres zu seiner Rotationsbewegung um die Spannachse 6a an. Diese Rotationsbewegung des an seiner äußeren Umfangsfläche mit einer feinen Verzahnung (nicht dargestellt) versehenen Spannrads 7 wird dazu genutzt, um mit der Umfangsfläche das Band B zu erfassen und das Band der Bandschlaufe zurückzuziehen, wodurch eine Bandspannung in der Bandschlaufe erhöht wird.On the other end face of the
Der dritte Planetenträger 37 weist auf seiner Außenfläche einen Absatz 37a auf, der durch eine Rotationsbewegung gegen ein Anschlagelement 39 in Kontakt gebracht werden kann. Das Anschlagelement 39 selbst ist nicht an der Wippe sondern an der Grundplatte 4 oder einem sonstigen Träger fixiert, der nicht mit der Wippe 8 bei deren Schwenkbewegung teilnimmt. Das Anschlagelement 39 ist somit in Bezug auf den Absatz 37a ortsfest.The
Im Einsatz bei der Umreifung von Packgut verhält sich das Umreifungsgerät 1 wie folgt: Nachdem um das jeweilige Packgut eine Bandschlaufe mit einem handelsüblichen Kunststoffumreifungsband gelegt ist, wird dieses im Bereich des Bandendes, in dem die Bandschlaufe abschnittsweise doppellagig ist, in das Bandumreifungsgerät eingelegt und das Bandende mit einer nicht näher dargestellten Bandklemme im Umreifungsgerät festgehalten. Ein sich unmittelbar an die Bandschlaufe anschließender Abschnitt des Bandes B wird doppellagig über die Spannplatte 9 der Spanneinrichtung 6 gelegt. Die Wippe 8 mit dem Spannrad 7 und dem vorgeschalteten Getriebe 26 befindet sich hierbei in ihrer oberen Endposition, in der das Spannrad 7 mit Abstand (mit seinem größten vorgesehenen Abstand) zur Spannplatte 9 angeordnet ist, wodurch sich ein möglichst großer Öffnungsspalt ergibt, der ein einfaches, komfortables und damit auch ein schnelles Einlegen des Bands in die Spanneinrichtung ermöglicht. Nachfolgend wird die Wippe auf eine dem Spannrad 7 gegenüberliegende Spannplatte 9 abgesenkt und gegen das zwischen der Spannplatte 9 und dem Spannrad 7 angeordnete Band gedrückt. Sowohl dieseIn use when strapping packaged goods, the strapping
Überführungsbewegung des Spannrads als auch die Höhe der zu Beginn des Spannvorgangs vom Spannrad auf das Band ausgeübte Anpresskraft kann durch ein oder mehrere vorgespannte Federelemente 44 (nicht dargestellt) erzeugt werden. Durch Betätigen einer Taste 10 kann das Federlement freigegeben und der gesamte Umreifungsvorgang mit seinen nacheinander ausgeführten Vorgangsabschnitten "Spannen", "Verschlusserzeugung", "Schneiden", Lösen der Spannung vom Band im Bereich der Spanneinrichtung,und "Anheben der Wippe" ausgelöst werden, wozu kein weiterer Eingriff durch den Bediener des Umreifungsgeräts erfolgen muss.Transfer movement of the tensioning wheel as well as the level of the contact pressure exerted by the tensioning wheel on the belt at the beginning of the tensioning process can be generated by one or more pretensioned spring elements 44 (not shown). By pressing a
Nachdem das Spannrad 7 automatisch von der offenen Position in seine Spannposition (vgl. Spannposition in
Im soeben zuvor beschriebenen Betriebszustand "Spannen" des Umreifungsgeräts entsteht durch das angetriebene, sich mit dem Band in Eingriff befindliche Spannrad 7 je nach Widerstandskraft, die aus der Bandspannung resultiert und als Reaktion auf das Spannrad 7 wirkt, am Spannrad 7 eine entsprechende in entgegengesetzte Richtung wirkende Gegenkraft. Diese Gegenkraft wirkt in umgekehrter Übertragungsrichtung wie die motorische Antriebsbewegung, auf sämtliche an der Übertragung der Antriebsbewegung beteiligte Getriebeglieder des mehrstufigen Planetengetriebes. Falls ein anderer Getriebetyp als ein ein- oder mehrstufiges Planetengetriebe zum Einsatz kommt, so steht auch an diesem die aus der bereits aufgebrachten Bandspannung resultierende und über den Kontakt mit dem Spannrad in das jeweilige Getriebe eingeleitete Gegenkraft zur Nutzung zur Verfügung an. Diese Gegenkraft kann zur Verbesserung der Verfahrensbedingungen, insbesondere der Funktionssicherheit auch bei hohen aufzubringenden Bandspannungen, eingesetzt werden. Um diese Gegenkraft für den nachfolgend beschriebenen Zweck zu nutzen, wäre es somit prinzipiell möglich jedes dieser Getriebeglieder hierfür einzusetzen, insbesondere an jedem dieser Getriebeglieder die genannte Gegenkraft abzugreifen und einzusetzen.In the "tensioning" operating state of the strapping device just described above, the driven
Es wird der Planetenträger 37 hierfür eingesetzt. Der Planetenträger 37 wird hierbei über das Anschlagelement 39 auf der Grundplatte 4 abgestützt, wodurch die ganze Spanneinrichtung 6 um die Wippenachse 8a proportional zur Widerstandskraft (Bandspannung) auf das Band gedrückt wird. Das Spannrad 7 wird somit proportional zur Bandspannung auf das Band B gedrückt. Die durch den Spannvorgang erzeugte Bandspannung wird genutzt, um in vorteilhafter Weise bei stetig ansteigender Bandspannung auch die Andrückkraft des Spannrads 7 auf das Band B zu erhöhen, wodurch der an sich bei steigender Bandspannung ebenfalls steigenden Gefahr eines "Durchrutschens" bzw. eines Schlupfs des Spannrads 7 beim Spannvorgang entgegen gewirkt werden kann.The
Der Planetenträger ist hierzu mit dem Eingriffselement 37a ausgebildet, das mit dem ortsfesten Anschlagelement 39 zusammenwirkt. Das als Nocken ausgebildete und am äusseren Umfang des Planetenträgers angeordnete und von diesem im wesentlichen radial abstehende Eingriffselement stützt sich am Anschlagelement 39 ab. Wie unter anderem aus
Nach einer Beendigung des Spannvorgangs und des sich an diesen anschließenden Schweissvorgangs zur Verschlussbildung sowie nach einem erfolgten motorisch angetriebenen Schneidvorgang durch eine nicht näher dargestellte in die Umreifungsvorrichtung integrierte, Schneidvorrichtung, soll eine komplikationsfreie und schnelle Entnahme des Bands aus der Umreifungsvorrichtung möglich sein. Um dies zu erreichen, ist eine motorische Anhebebewegung des Spannrads 7 aus der Spannposition vorgesehen. Dazu wird die Taste betätigt und solange die Taste 10 betätigt ist, bleibt auch die Wippe in der offenen Position, in der eine ausreichende Distanz zwischen der Spannplatte 9 und dem Spannrad 7 geschaffen ist. Durch Loslassen der Taste 10 wird die Wippe geschlossen, beispielsweise durch Federkraft..After the end of the tensioning process and the subsequent welding process to form a seal, as well as after a motor-driven cutting process by a cutting device (not shown) integrated into the strapping device, the tape should be able to be removed quickly and without complications from the strapping device. To achieve this, a motorized lifting movement of the
Es wird hierfür zunächst die Wirkverbindung zwischen dem Elektromotor M und dem Spanhrad 7 gelöst und eine Wirkverbindung zwischen dem Elektromotor M und der Wippe 8 geschaffen. Dies wird durch Schalten der Klemmen 29, 33 erreicht. Die zuvor bestehende Klemmung des Hohlrads 32 wird dadurch aufgehoben, dass die zweite Klemme 33 von der Aussenfläche 32a des Hohlrads 32 entfernt wird und diese dadurch das Hohlrad 32 für Rotationsbewegungen freigibt. Im wesentlichen gleichzeitig oder unmittelbar danach wird die erste Klemme 29 auf die Klemmfläche 25a des Planetenträgers 25 abgesenkt und mit dieser in klemmende Anlage gebracht. Hierdurch ist der eingangsseitige Planetenträger 25 gegen eine Rotationsbewegung um die Spannachse 6a fixiert und gesperrt, entlang dem sich das gesamte Planetengetriebe befindet.For this purpose, the operative connection between the electric motor M and the
Das Spannrad 7 kann sich dadurch antriebsfrei frei drehen und hat keine Wirkverbindung zum Elektromotor M und zum Sonnenrad 30 mehr, die eine Antriebsbewegung übertragen könnte. Eine Antriebsbewegung des Elektromotors M mit der gleichen Drehrichtung wie beim Spannvorgang wird nun aufgrund der Sperrung des eingangsseitigen Planetenträgers 25 des Planetengetriebes dazu genutzt, dass die Planetenräder 25b des Stirnrads 25 bei ihrer Drehbewegung das eingangsseitige Hohlrad 27 mitnehmen. Das eingangsseitige Hohlrad 27 führt somit aufgrund der drehenden Planetenrädern 25b eine Rotationsbewegung aus. Die Anlage und Abstützung des Hohlrads 27 am Abstützelement 46 führt zu einer Schwenkbewegung des Hohlrads 27 um die Wippenachse 8a. Das aufgrund der Klemmung auch drehfest mit der Wippe 8 verbundene eingangsseitige Hohlrad 27 nimmt bei dieser Bewegung die Wippe 8 mit. Dies führt zu einer Anhebung der Wippe 8 und der an ihr befestigten Spanneinrichtung 6 einschliesslich des Spannrads 7. Die Drehbewegung der Wippe 8 kann durch einen Anschlag oder ein Endpositionsgeber begrenzt sein, der den Motor M nach Erreichen einer Endposition in der geöffneten Stellung der Wippe 8 abstellt und eine Arretierung der Wippe auslöst. Durch die motorische Anhebebewegung der Wippe 8 entgegen der Wirkrichtung des Federelements 44 wird auch das Federelement 44 wieder mit einer vergrößerten Vorspannkraft versehen. Das Umreifungsband B kann nun aus dem Umreifungsgerät 1 entnommen werden.As a result, the
Das Umreifungsgerät ist nun für eine nachfolgende neue Umreifung bereit, die in an sich gleicher Weise wie die zuvor beschriebene Umreifung erfolgen kann. Zum nachfolgenden Absenken der Wippe 8 nach Einführung eines neuen Abschnitts des Umreifungsbands B in die Umreifungsvorrichtung 1 muss das Federelement 44 wieder freigegeben werden, was beispielsweise über eine bedienbare Taste am Umreifungsgerät erfolgen kann. Es wird hierzu die zuvor betätigte Taste 10 losgelassen. Die Federkraft schwenkt dann die Wippe 8 in nun umgekehrter Schwenkrichtung auf die Spannplatte zu und klemmt für den nachfolgenden Spannvorgang das Band mit einer initialen Andrückkraft zwischen dem Spannrad 7 und der Spannplatte 9 ein. Die im weiteren Verlauf des Spannvorgangs variable Andrückkraft steigt wie beschrieben an.The strapping device is now ready for a subsequent new strapping, which can be done in the same way as the strapping described above. For the subsequent lowering of the
In den
Ebenso weist die Ausführungsform eine um eine Wippenschwenkachse 80a motorisch angetriebene schwenkbare Wippe 80 der Spanneinrichtung 86 auf. Im Unterschied zum zuvor erörterten Beispiel ist hier nicht das Spannrad 87 sondern die Spannplatte 89 an der schwenkbaren Wippe 80 angeordnet, deren Wippenschwenkachse 80a parallel zur Spannachse 86a verläuft. Die motorische Antriebsbewegung mit der Drehrichtung, die für Rotationsbewegungen um die Spannachse 86a genutzt wird, wird auch bei diesem Ausführungsbeispiel zur Schwenkbewegung der Wippe 80 genutzt. Die Wippenschwenkachse 80a verläuft auch bei dieser Ausführungsform im wesentlichen parallel zur Spannachse 86a , um die das Spannrad rotierbar gelagert ist. Die Rotationsbewegung des Motors wird hinter einer Stelle, an der die motorische Antriebsbewegung für die Schweisseinrichtung genutzt wird, über ein Kegelradpaar 99, 100 auf ein Planetengetriebe 106 übertragen und von diesem an das Spannrad 87 weitergegeben. Mit einem auf der Welle eines eingangsseitigen Sonnenrads 110 angeordneten Freilaufs 125 wird sichergestellt, dass die Eingangsseite des Planetengetriebes 106 nur in eine Drehrichtung sich drehen kann. Das Planetengetriebe 106 ist mit Getriebeelementen versehen, die wie heim zuvor beschriebenen Beispiel mittels einer von zwei Klemmen 29, 33 aufweisenden Sperreinrichtung wahlweise arretiert werden können, wodurch die Antriebsbewegung entweder auf das Spannrad 87 oder auf die Wippe 80 übertragen werden kann.The embodiment also has a
Zum Öffnen der Spanneinrichtung 86 wird das Hohlrad 107 über die Sperrvorrichtung freigestellt, d.h. die Klemme 33 ist nicht mit dem Hohlrad 107 in klemmenden Eingriff. Das Spannrad 87 kann sich dadurch ohne Wirkverbindung mit dem Motor M frei drehen. Gegebenenfalls vom soeben vorausgegangenen Spannvorgang noch vom Umreifungsband B auf das Spannrad 87 rückwirkende Bandspannung wird dadurch vom Spannrad 87 und dem dem Spannrad vorgeschalteten Getriebe 106 gelöst. Mit der Klemme 29 wird das als Planetenträger 105 ausgebildete Stirnrad gesperrt, dessen Drehachse mit der Spannachse 86a, also der Rotationsachse des Spannrads 87, fluchtet. Die vom Kegelrad 100 auf das eingangsseitige Sonnenrad 110 übertragene motorische Antriebsbewegung kann aufgrund der mittels der Klemme 29 vorgenommenen lösbaren rotatorischen Arretierung des Planetenträgers 105 nicht zu einer Rotation des Planetenträgers 105 sondern zu Rotationsbewegungen der Planetenräder 105b des Planetenträgers 105 führen. Die mit diesen Planetenrädern 105b in Eingriff stehende Innenverzahnung des Hohlrads 109 versetzt letzteres in Rotationsbewegung. Wie insbesondere in
Die Rotationsbewegung des Hohlrads 109 sowie der Eingriff des Hohlrads 109 in das Kreisbogensegment 150 führt zu einer Rotationsbewegung der Verbindungswelle 151 um die Verbindungsachse 151a. Ein am anderen Ende der Verbindungswelle 151 angeordnetes Stirnrad 152 greift in eine Aussenverzahnung 117c des Planetenträgers 117 ein und überträgt hierdurch die Rotationsbewegung um die Verbindungsachse 151a auf den Planetenträger 117. In Bezug auf die Spannachse 86a befindet sich die Verbindungsachse 151a auf der einen und die Wippenschwenkachse 80a auf der anderen Seite der Spannachse 86a, wobei sich die Wippenschwenkachse 80a auf der Seite des kopfseitigen Endes des Umreifungsgeräts befindet.The rotational movement of the
Der Planetenträger 117 gehört zum Antriebsstrang, der für die Antriebsbewegung des Spannrads 87 vorgesehen ist. Die Wirkverbindung dieses Antriebsstrangs zum Motor M ist aufgrund der zuvor beschriebenen Schaltstellung der Sperreinrichtung momentan unterbrochen. Damit besteht zu dem zuvor beschriebenen Verfahrenszeitpunkt keine Wirkverbindung des Motors M mit dem Spannrad 87, um letzteres anzutreiben. Als Resultat der auf den Planetenträger 117 übertragenen Drehbewegung dreht sich der Planetenträger 117 um die Spannachse 86a und nimmt mit einem an seiner äusseren Umfangsfläche angeordneten Nocken 117a einen Mitnehmer 80c der Wippe 80 mit. Die in Bezug auf eine Draufsicht bogenförmige Wippe 80 dreht sich hierdurch und wird geöffnet.The
Die um die Wippenachse 80a drehbar gelagerte und näherungsweise die Form eines Bogenabschnitts aufweisende Wippe 80 ist mit ihrem unteren freien Ende unterhalb des Spannrads 87 angeordnet, so dass die im Bereich des freien Endes der Wippe 80 angeordnete Spannplatte 89 ebenfalls unmittelbar unterhalb des Spannrads 87 angeordneten werden kann. Um die Spannplatte 89 mit Abstand zum Spannrad 87 anzuordnen, wird die zuvor beschriebene motorisch angetriebene Bewegung der Wippe 80 in Drehrichtung gemäss Pfeil 112 (
Zum Spannen des zwischen dem Spannrad 87 und der Spannplatte 89 angeordneten Umreifungsbands B wird das Hohlrad 107 an seiner äusseren Umfangsfläche mittels der Klemme 33 gegen Rotationsbewegungen geklemmt. Der Planetenträger 105 ist nicht geklemmt, kann sich somit ebenso wie die Verbindungswelle 8 drehen. Die vom Sonnenrad 30 in das auf der Spannachse 86a angeordnete Planetengetriebe 106 motorische Antriebsbewegung wird durch den Planetenträger 105 und das Hohlrad 107 hindurch auf die Planetenräder 114 des zweiten Planetenträgers 115 übertragen und letzterer in Rotation versetzt. Ein in der Darstellung von
Im zuvor beschriebenen Betriebszustand "Spannen", in dem das Spannrad 87 mit dem Band B in Eingriff ist, entsteht aufgrund der Bandspannung eine vom Band B auf das rotierende Spannrad 87 in Form eines Rückstellmoments einwirkende Widerstandskraft. Deren Größe ist variabel und proportional zur Größe der aufgebrachten Bandspannung. Diese Widerstandskraft wirkt entgegengesetzt zum motorischen Antriebsmoment das in den an der Übertragung der Antriebsbewegung beteiligten Getriebegliedern ansteht. Im Ausführungsbeispiel stützt sich der Planetenträger 117 mit einem Nocken 117b, der die Funktion eines Anschlags hat, an der Wippe 80 ab. Der durch die motorisch Antriebsbewegung in geeigneter Drehrichtung rotierende Planetenträger 117 liegt mit seinem Nocken 117b gegen einen Mitnehmer 80b der Wippe an und dreht diese hierdurch in einer Bewegung gemäß Pfeil 113 (
In den
Das Klemmelement 33 ist um die Schalt- und Schwenkachse 143 schwenkbar gelagert, wobei die Schaltachse 143 des Klemmelements 33 parallel zur Rotationsachse des zu klemmenden Rades 107 verläuft. Die Schaltachse 143 verläuft im Bereich von einem Ende des nockenförmigen Klemmelements 33. Im Bereich des anderen Endes des Klemmelements ist eine bogenförmige Kontaktfläche 33a vorgesehen, die für einen Kontakt mit der Klemmfläche 107b des zu klemmenden Rads vorgesehen ist. Aufgrund der Kreisform der Klemmfläche 109b sowie der in der Seitenansicht Bogenform der Kontaktfläche 33a kommt bei Kontakt des Klemmelements 33 mit der Umfangsfläche 107b eine im wesentlichen linienförmige Berührung zustande, wobei diese Kontaktlinie senkrecht zur Zeichenebene von
Wie aus
In
Bei den hier erörterten bevorzugten Ausführungsformen der Erfindung ist es, sofern die Keilwirkung stark genug ausgebildet ist, nicht zwingend erforderlich, dass die Position des Nockens in seiner Klemmposition durch eine von außen erfolgende Massnahme gehalten wird. Dies ergibt sich schon alleine daraus, dass das Rad 107 nur in eine Drehrichtung drehbar ist und genau diese durch die Klemme 33 lösbar blockiert ist. In bevorzugten Ausführungsformen der Erfindung wird das nockenförmige Klemmelement durch die Federkraft eines Federelements 159 in Position gehalten. Das Federelement 159 liegt hierzu oberhalb der Schaltachse 143 gegen das Klemmelement an und dreht bzw. hält das Klemmelement 29 in seiner Klemmposition. Um das Klemmelement aus seiner Klemmposition zu entfernen muss mit einem Schalter 160 die Federkraft überwunden werden. Mit dem Schalter 160 können beide Klemmen 29 und 33 gleichzeitig betätigt werden. Je nach Anordnung des Schalter/Taste kann mit einem Ziehen oder Drücken des Schalters die Federkraft überwunden und das Hohlrad 107 von der Klemme 33 freigegeben und der Planetenträger 105 gesperrt werden. Bei der jeweiligen anderen Bewegung des Schalters/Taste wird über die Federkraft die Klemme 29 und der Planetenträger 105 wieder gelöst, während die Klemme 33 das Hohlrad 107 sperrt.In the preferred embodiments of the invention discussed here, if the wedge effect is strong enough, it is not absolutely necessary for the position of the cam to be held in its clamping position by an external measure. This arises from the fact that the
Claims (15)
- Strapping device for strapping packaged goods with a strap,
said strapping device having a tensioning apparatus (86) for applying a strap tension to a loop of a strap, wherein the tensioning apparatus (86) is provided with a tensioning wheel (87) which is able to be driven in a motorized manner so as to rotate about a tensioning axis (86a) and is provided for engaging in the strap, the tensioning apparatus furthermore has a tensioning plate (89), wherein it is provided during a tensioning procedure carried out by the tensioning apparatus (86) that a single-ply or multi-ply portion of the strap is situated between the tensioning wheel (87) and the tensioning plate (89) and contacts the tensioning wheel (87) as well as the tensioning plate (89),
the tensioning plate (89) is furthermore disposed on a rocker (80) which in a motorized manner is pivotable about a rocker axis so as to by way of a pivoting movement of the rocker (80) either increase or decrease a spacing between the tensioning wheel (87) and the tensioning plate (89), as well as having a connecting apparatus for, by means of a connecting element, such as a welding element, which is provided for locally heating the strap, generating a permanent connection, in particular a welded connection, on two regions of the loop of the strap that lie on top of one another, characterized in that
while the motorized driving movement is being transmitted to the tensioning wheel (87), for as long as the tensioning wheel (87) engages with the strap, a driving movement by means of a transmission means (117) of the strapping device is transmitted to the rocker (80) which is pivotable during the duration of the tensioning procedure, wherein the driving movement is provided for exerting a torque on the rocker (80). - Strapping device according to Claim 1, characterized in that, during the tensioning procedure of the strap by means of the tensioning wheel (87) that engages in the strap and rotates counter to a strap tension, a counterforce which acts from the strap on the tensioning wheel (87) or on the tensioning plate (89) is utilized for increasing the contact pressure of the tensioning plate (89) in relation to the strap.
- Strapping device according to Claim 2, characterized by an increase in the contact pressure, said increase taking place so as to be at least substantially proportional to the respective momentary strap tension.
- Strapping device according to one of the preceding claims, characterized by only one motor (M), by way of the driving movements of which in identical rotating directions, both the tensioning wheel (87) for tensioning the strap is able to be set in rotation and the rocker (80) having the tensioning plate (89) disposed thereon is pivotable about the rocker axis, in particular so as to enlarge a spacing between the tensioning wheel (87) and the tensioning plate (89) by way of this pivoting movement.
- Strapping device according to Claim 1, characterized by means for variably pressing the tensioning wheel (87) onto the strap independently of the strap tension.
- Strapping device according to Claim 5, characterized in that the variable pressing of the tensioning wheel (87) against the strap independently of the strap tension takes place by virtue of a motorized driving movement.
- Strapping device according to Claim 6, characterized in that the variable pressing independently of the strap tension takes place by way of the same motorized driving movement by way of which the tensioning wheel (87) is also driven for rotation.
- Strapping device according to one of the preceding claims, said strapping device having a gearbox (106) for transmitting a driving movement in particular to the tensioning apparatus (86), the gearbox (106) to this end having at least one rotatable wheel (107) which is able to be locked by means of a blocking apparatus,
characterized in that
the blocking apparatus has at least one clamp (29, 33) which is pivotable about a pivot axis and is disposed so as to be spaced apart from the wheel (107) and which from a releasing position is pivotable to a blocking position in which said blocking apparatus comes to bear against a substantially flat circumferential clamping face (107b) of the wheel (107), wherein the clamp (29,33) has a pivoting radius (155) which is larger than a spacing of the pivot axis of the clamp (29, 33) from the circumferential clamping face (107b) of the wheel (107), and the rotating direction of the clamp (29, 33) about the pivot axis when transitioning from the releasing position to a clamping position runs in a sense of rotation which is counter to that of the wheel (107) to be clamped. - Strapping device according to Claim 8, characterized in that in the clamping position a pivoting radius of the clamp (29, 33) at a contact point of the clamp (29, 33) on the circumferential clamping face (107b) of the wheel (107) in relation to a connecting line between the pivot axis (143) and a rotation axis of the wheel (107) encloses an angle γ which is chosen from a range from 120° to 170°, preferably from a range from 140° to 165°, particularly preferably from a range from 149° to 162°, and most particularly preferably from a range from 152° to 158°.
- Strapping device according to Claim 8 or 9, characterized in that in the clamping position the pivoting radius (155) of the clamp (29, 33) at the contact point of the clamp (29, 33) and the circumferential clamping face in relation to a connecting line (156) between the rotation axis of the wheel (107) and the pivot axis (143) of the clamp (29, 33) encloses an angle α which is chosen from a range from 5° to 25°, preferably from a range from 7° to 15°, and particularly preferably from 7° to 10°.
- Strapping device according to one of preceding Claims 8 to 10, characterized in that the blocking apparatus is provided for clamping a wheel (107) of the tensioning apparatus (86).
- Strapping device according to Claim 11, characterized in that the blocking apparatus for clamping a wheel (107) is brought to bear during the tensioning phase, and on which wheel the strap tension applied to the strap acts completely or partially.
- Strapping device according to Claim 12, characterized in that the blocking apparatus is provided for releasing the clamping action previously performed, while the strap tension acts completely or partially on the clamped wheel (107).
- Strapping device according to one of preceding Claims 1 to 7, characterized by a gearbox (106) of the tensioning apparatus (86) by way of which a motorized driving movement for the tensioning wheel (87) is negatively or positively geared, and which completely or partially is a component part of the transmission means (117) by way of which the force acting on the tensioning wheel (87) and resulting from the strap tension is transmitted from the strap to the rocker (80).
- Strapping device according to one of preceding Claims 1 to 7, characterized in that the transmission means (117) constitute an operative connection between the tensioning wheel (87) and the rocker (80) and comprise a rotatably mounted gearbox element which during the tensioning procedure is operatively connected to the tensioning wheel (87).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH17232012 | 2012-09-24 | ||
| CH17242012 | 2012-09-24 | ||
| PCT/IB2013/002116 WO2014167377A1 (en) | 2012-09-24 | 2013-09-24 | Strapping device having a pivotable rocker |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2897866A1 EP2897866A1 (en) | 2015-07-29 |
| EP2897866B1 true EP2897866B1 (en) | 2021-08-04 |
Family
ID=49765564
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13821914.2A Active EP2897867B1 (en) | 2012-09-24 | 2013-09-24 | Strapping device |
| EP13805503.3A Active EP2897866B1 (en) | 2012-09-24 | 2013-09-24 | Strapping device having a pivotable rocker |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13821914.2A Active EP2897867B1 (en) | 2012-09-24 | 2013-09-24 | Strapping device |
Country Status (7)
| Country | Link |
|---|---|
| US (8) | US9932135B2 (en) |
| EP (2) | EP2897867B1 (en) |
| JP (2) | JP6329151B2 (en) |
| CN (2) | CN104870315B (en) |
| CH (2) | CH707028A2 (en) |
| ES (2) | ES2895662T3 (en) |
| WO (2) | WO2014167377A1 (en) |
Families Citing this family (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9272799B2 (en) | 2011-10-04 | 2016-03-01 | Signode Industrial Group Llc | Sealing tool for strap |
| US9468968B2 (en) * | 2012-08-30 | 2016-10-18 | Signode Industrial Group Llc | Battery powered tensioning tool for strap |
| JP6329151B2 (en) | 2012-09-24 | 2018-05-23 | シグノード インターナショナル アイピー ホールディングス エルエルシー | Banding device |
| CH708294A2 (en) * | 2013-05-05 | 2014-12-15 | Orgapack Gmbh | Strapper. |
| PL3105126T3 (en) | 2014-02-10 | 2018-11-30 | Orgapack Gmbh | Tensioning device for a strapping device |
| US9988163B2 (en) * | 2014-05-28 | 2018-06-05 | Hsiu-Man Yu Chen | Fiber strap packing machine |
| US10577137B2 (en) * | 2015-12-09 | 2020-03-03 | Signode Industrial Group Llc | Electrically powered combination hand-held notch-type strapping tool |
| CH712984A2 (en) | 2016-09-18 | 2018-03-29 | Signode Ind Group Llc | Strapping device for strapping packaged goods with a strapping band. |
| US11981464B2 (en) | 2016-11-06 | 2024-05-14 | Golden Bear LLC | Strapping tensioning and sealing tool |
| US10745158B2 (en) * | 2016-11-06 | 2020-08-18 | Golden Bear LLC | Strapping tensioning and sealing tool |
| CN106494661B (en) * | 2016-12-09 | 2023-03-03 | 重庆锦沙沣包装有限公司 | Wrapping bag finishing device |
| JP6922221B2 (en) | 2016-12-29 | 2021-08-18 | マックス株式会社 | Cable ties |
| USD864688S1 (en) | 2017-03-28 | 2019-10-29 | Signode Industrial Group Llc | Strapping device |
| CH713645A2 (en) | 2017-01-30 | 2018-09-28 | Signode Ind Group Llc | Strapping device with an actuating element of the clamping device. |
| CH713646A2 (en) | 2017-01-30 | 2018-09-28 | Signode Ind Group Llc | Strapping device with a clamping device. |
| CN116336176A (en) * | 2017-09-03 | 2023-06-27 | 深圳市施威德自动化科技有限公司 | Three-terminal input/output mechanism of automatic ribbon tool |
| WO2019165142A1 (en) | 2018-02-21 | 2019-08-29 | Golden Bear LLC | Strapping tool |
| CN208397169U (en) | 2018-07-05 | 2019-01-18 | 台州市新大陆电子科技有限公司 | A kind of reinforcing-bar binding machine wire feeding disc arrestment mechanism with positioning device |
| ES2910036T3 (en) * | 2019-02-15 | 2022-05-11 | Titan Umreifungstechnik Gmbh & Co Kg | strapping device |
| US11174051B2 (en) * | 2019-02-15 | 2021-11-16 | Samuel, Son & Co. (Usa) Inc. | Hand held strapping tool |
| US11247792B2 (en) * | 2019-02-15 | 2022-02-15 | Samuel, Son & Co. (Usa) Inc. | Strapping device |
| EP3696103A1 (en) * | 2019-02-15 | 2020-08-19 | TITAN Umreifungstechnik GmbH & Co.KG | Strapping device, in particular for steel strips |
| IT201900006286A1 (en) | 2019-04-24 | 2020-10-24 | Itatools S R L | STRAPPING MACHINE |
| IT201900006288A1 (en) | 2019-04-24 | 2020-10-24 | Itatools S R L | STRAPPING MACHINE |
| CA192340S (en) * | 2019-07-22 | 2021-12-30 | Ergopack Deutschland Gmbh | Packaging machine |
| US11511894B2 (en) | 2019-09-26 | 2022-11-29 | Hellermanntyton Corporation | Cable tie application tool |
| CN111017282A (en) * | 2019-12-24 | 2020-04-17 | 湖南创航科技有限公司 | Lifting mechanism of tightening wheel mechanism of handheld packer |
| EP3862511A1 (en) | 2020-02-10 | 2021-08-11 | Max Co., Ltd. | Binding machine |
| KR102541276B1 (en) * | 2020-04-09 | 2023-06-13 | 타이저우 용파이 팩 이큅먼트 컴퍼니 리미티드 | welding device |
| US11560247B2 (en) | 2020-05-27 | 2023-01-24 | Golden Bear LLC | Strapping tool |
| US20230150704A1 (en) * | 2020-07-13 | 2023-05-18 | Signode Industrial Group Llc | Strapping tool |
| AU2021331964B2 (en) * | 2020-08-25 | 2024-06-13 | Zhejiang Weipai Packing Equipment Co.,Ltd. | Tensioning mechanism |
| CN114104372A (en) * | 2020-08-25 | 2022-03-01 | 台州市永派包装设备有限公司 | Tensioning mechanism |
| US12085065B2 (en) | 2020-10-20 | 2024-09-10 | Golden Bear LLC | Pump comprising balls for displacement of fluid |
| CN112550802B (en) * | 2020-11-05 | 2022-09-06 | 北京空间机电研究所 | Parachute packaging device and method |
| WO2022095533A1 (en) * | 2020-11-06 | 2022-05-12 | 台州市永派包装设备有限公司 | Belt pressing mechanism |
| ES2967495T3 (en) | 2020-11-12 | 2024-04-30 | Itatools S R L | Control mechanism for strapping machine tilting machine |
| CN112977924A (en) * | 2021-04-15 | 2021-06-18 | 安徽燊泰智能设备有限公司 | Clamping mechanism of wire feeding unit of automatic packaging machine and wire feeding unit thereof |
| CN113460354B (en) * | 2021-07-16 | 2022-11-15 | 重庆永源包装设备有限公司 | Packing device |
| TWI822092B (en) * | 2021-07-23 | 2023-11-11 | 美商賽諾得工業集團有限責任公司 | Strapping tool |
| USD983245S1 (en) * | 2021-09-24 | 2023-04-11 | Dongguan Jingduan Packaging Technology Co. Ltd | Pallet strapping machine |
| USD1012641S1 (en) | 2021-10-25 | 2024-01-30 | Aptiv Technologies Limited | Tool nosepiece |
| CN114083969B (en) * | 2021-10-29 | 2024-06-14 | 如果科技有限公司 | Dual-motor drive axle assembly and vehicle |
| CN118742488A (en) * | 2022-02-16 | 2024-10-01 | 信诺工业集团有限责任公司 | Strapping tool with locked resistance moment |
| WO2024081475A1 (en) * | 2022-10-14 | 2024-04-18 | Signode Industrial Group Llc | Strapping device with motor-driven rocker |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6109325A (en) * | 1999-01-12 | 2000-08-29 | Chang; Jeff Chieh Huang | Portable electrical binding apparatus |
| DE10026200A1 (en) * | 2000-05-26 | 2001-11-29 | Cyklop Gmbh | Device for tensioning strapping |
| WO2009129636A1 (en) * | 2008-04-23 | 2009-10-29 | Orgapack Gmbh | Strapping device with a tensioner |
| DE202011050797U1 (en) * | 2011-07-22 | 2011-11-11 | Pantech International Inc. | Rocker arm assembly of a strapping machine |
Family Cites Families (178)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3028885A (en) * | 1958-06-02 | 1962-04-10 | Signode Steel Strapping Co | Power strap tensioning tool |
| US3206167A (en) | 1963-11-07 | 1965-09-14 | Stanley Works | Strap tensioner device with fulcrum means for pivotal removal of the device |
| US3284049A (en) | 1965-03-31 | 1966-11-08 | Signode Corp | Feed wheel drive mechanism for strapping tools |
| US3367374A (en) | 1965-04-08 | 1968-02-06 | Signode Corp | Gripper plug |
| US3360017A (en) | 1965-07-16 | 1967-12-26 | Signode Corp | Combination strapping tool |
| US3442733A (en) | 1965-08-13 | 1969-05-06 | Signode Corp | Combination strap tensioning and sealing tool |
| FR1513685A (en) | 1966-02-02 | 1968-02-16 | Signode Corp | Improved device for strapping objects using straps of thermoplastic material |
| GB1161827A (en) | 1966-11-29 | 1969-08-20 | Naigai Seikosho Kk | Band Feeding and Tightening Device of Automatic Strapping Machines. |
| DE1973947U (en) | 1967-09-05 | 1967-11-30 | Banholzer & Wenz | TENSIONING DEVICE FOR TAPES, ESPECIALLY MADE OF PLASTIC, TEXTILES AND THE LIKE. |
| US3654033A (en) | 1970-04-01 | 1972-04-04 | Signode Corp | Strap tensioning and sealing tool |
| US3844317A (en) | 1973-06-18 | 1974-10-29 | Signode Corp | Strap tensioning tool |
| US4050372A (en) | 1976-01-21 | 1977-09-27 | Signode Corporation | Automatic strapping machine |
| US4011807A (en) | 1976-01-21 | 1977-03-15 | Signode Corporation | Strap feeding and tensioning machine |
| US4015643A (en) | 1976-01-21 | 1977-04-05 | Signode Corporation | Tensioning tool with self-energizing gripper plug |
| US4020879A (en) | 1976-05-28 | 1977-05-03 | Fmc Corporation | Power strapping tool |
| JPS5953143B2 (en) | 1977-06-07 | 1984-12-24 | 旭化成株式会社 | Continuous casting mold |
| US4161910A (en) | 1978-05-19 | 1979-07-24 | Signode Corporation | Strap feeding and tensioning assembly |
| US4239096A (en) | 1978-10-10 | 1980-12-16 | Smilgys Bruno S | Power tool safety clutch |
| GB2041869B (en) | 1979-02-23 | 1982-12-08 | Nichiro Kogyo Kk | Band feeding and tightening method and device for strapping machinqe |
| CH637587A5 (en) * | 1979-05-11 | 1983-08-15 | Borbe Wanner Ag | DEVICE FOR STRAPPING OBJECTS WITH A PLASTIC STRAP. |
| US4240865A (en) | 1979-06-25 | 1980-12-23 | Interlake, Inc. | Apparatus and method for applying plastic strap |
| US4313779A (en) | 1979-07-30 | 1982-02-02 | Signode Corporation | All electric friction fusion strapping tool |
| ZA804443B (en) | 1979-07-30 | 1981-07-29 | Signode Corp | All electric friction fusion strapping tool |
| US4535730A (en) * | 1980-12-08 | 1985-08-20 | Allen Dillis V | Rocker engine |
| DE3118710A1 (en) | 1981-05-12 | 1982-12-09 | Cyklop International Emil Hoffmann KG, 5000 Köln | DEVICE FOR TENSIONING, SEALING AND CUTTING PLASTIC TAPES FOR PACKAGE STRAPS |
| DE3220446A1 (en) | 1982-05-29 | 1984-01-26 | Hoesch Werke Ag, 4600 Dortmund | FEED AND TENSIONING DEVICE FOR A STRAP TO TENSION A PACKAGE |
| KR880002177B1 (en) | 1982-11-15 | 1988-10-17 | 마쓰소노 히사미 | Process for beverage of acid milk |
| DE3332258A1 (en) | 1983-09-07 | 1985-03-21 | Trumpf GmbH & Co, 7257 Ditzingen | MOTOR-DRIVEN HAND MACHINE WITH TWO-PIECE TOOLS, ESPECIALLY FOR PUNCHING |
| GB2185228B (en) | 1983-09-20 | 1987-12-09 | Bowthorpe Hellermann Ltd | Automatic tie gun |
| US4572064A (en) | 1984-05-23 | 1986-02-25 | Burton R Edward | Brush bundling system |
| DE3525647A1 (en) | 1984-11-17 | 1987-01-29 | Signode Corp | Control of the tensioning device for relieving the packaging band in an automatic strapping machine |
| US4707390A (en) | 1986-06-06 | 1987-11-17 | Signode Corporation | Thermoplastic strap weld with encapsulated cavities |
| US4776905A (en) | 1986-06-06 | 1988-10-11 | Signode Corporation | Method and apparatus for producing a welded joint in thermoplastic strap |
| JPS646555A (en) | 1987-06-27 | 1989-01-11 | Canon Kk | Driving power transmitting device |
| GB8812292D0 (en) | 1988-05-24 | 1988-06-29 | Black & Decker Inc | Improvements in/relating to power tools |
| RU1772784C (en) | 1989-11-04 | 1992-10-30 | Опытное Конструкторско-Технологическое Бюро С Опытным Производством Института Металлофизики Ан Усср | Device for automatic control of drive |
| DE4014307C2 (en) | 1990-05-04 | 1996-11-07 | Rmo Systempack Gmbh | Packing machine |
| DE4014305C2 (en) | 1990-05-04 | 1996-07-18 | Rmo Systempack Gmbh | Device for connecting overlapping sections of a thermoplastic tape |
| US5133532A (en) | 1990-10-11 | 1992-07-28 | Illinois Tool Works Inc. | Method and apparatus for controlling tension in a strap loop |
| US5146847A (en) | 1991-04-01 | 1992-09-15 | General Motors Corporation | Variable speed feed control and tensioning of a bander |
| US5165532A (en) | 1991-05-29 | 1992-11-24 | Westinghouse Electric Corp. | Circuit breaker with interlock for welding contacts |
| US5159218A (en) | 1991-07-09 | 1992-10-27 | Allied-Signal Inc. | Motor with integral controller |
| DE4204420A1 (en) | 1992-02-14 | 1993-08-19 | Fein C & E | Battery-driven hand tool e.g. electric screwdriver - has separate battery pack and state-of-charge indicator plugging into rear of tool housing, forming rechargeable unit |
| JP2857280B2 (en) | 1992-06-10 | 1999-02-17 | ストラパック株式会社 | Band supply / tightening method and device for packing machine |
| JP3044132B2 (en) | 1992-07-20 | 2000-05-22 | ストラパック株式会社 | Band bonding method and apparatus for packing machine |
| IT1256240B (en) | 1992-12-23 | 1995-11-29 | Sestese Off Mec | CONTROL DEVICE FOR DRAGING THE STRAP IN A STRAPPING MACHINE |
| GB9320181D0 (en) | 1993-09-30 | 1993-11-17 | Black & Decker Inc | Improvements in and relating to power tools |
| DE9316072U1 (en) | 1993-10-21 | 1994-01-05 | Cyklop GmbH, 50996 Köln | Device for tensioning and closing strapping |
| ATE149443T1 (en) | 1994-01-24 | 1997-03-15 | Orgapack Ag | TENSIONING AND CLOSING DEVICE FOR STRAPPING AN OBJECT WITH A PLASTIC BAND |
| US5516022A (en) | 1994-02-28 | 1996-05-14 | Illinois Tool Works, Inc. | Method and apparatus for a two speed strap take up |
| JPH07300108A (en) | 1994-05-09 | 1995-11-14 | Kioritz Corp | Packaging machine |
| BR9508125A (en) | 1994-06-24 | 1997-08-12 | Talon Ind Llc | Apparatus and process for tying a wire around at least one object |
| JPH08258808A (en) | 1995-03-24 | 1996-10-08 | Kioritz Corp | Packing machine |
| US5632851A (en) | 1995-04-05 | 1997-05-27 | Pantech International, Inc. | Portable article strapping apparatus |
| ATE195476T1 (en) | 1995-05-26 | 2000-09-15 | Orgapack Gmbh | TENSIONING AND CLOSING DEVICE FOR STRAPPING AN OBJECT WITH A PLASTIC BAND |
| CA2176636A1 (en) | 1995-05-26 | 1996-11-27 | Nikolaus Stamm | Tensioning and sealing apparatus for strapping an object with a band |
| JP3702911B2 (en) | 1996-02-02 | 2005-10-05 | 横浜ゴム株式会社 | Pneumatic radial tire |
| JP3286524B2 (en) | 1996-04-15 | 2002-05-27 | 三洋電機株式会社 | Battery pack |
| US5798596A (en) | 1996-07-03 | 1998-08-25 | Pacific Scientific Company | Permanent magnet motor with enhanced inductance |
| JP3227693B2 (en) | 1996-08-02 | 2001-11-12 | マックス株式会社 | Prevention method of wire breakage in rebar tying machine |
| CN2266566Y (en) | 1996-09-14 | 1997-11-05 | 泛源股份有限公司 | Portable bundling machine |
| US5809873A (en) | 1996-11-18 | 1998-09-22 | Ovalstrapping, Inc. | Strapping machine having primary and secondary tensioning units and a control system therefor |
| US5941360A (en) | 1996-11-21 | 1999-08-24 | Snap-On Technologies, Inc. | Impulse wrench with wrap spring clutch assembly |
| RU2161773C2 (en) | 1996-12-14 | 2001-01-10 | Владимир Федотович Русинов | Angle determination device |
| US5916108A (en) | 1997-05-08 | 1999-06-29 | Bedford Industries, Inc. | Device and method for applying a tie ribbon to an aritcle |
| DE19751861A1 (en) | 1997-06-26 | 1999-01-07 | Dieter Bohlig | electrical drive system and motion control |
| US5853524A (en) | 1997-06-26 | 1998-12-29 | Illinois Tool Works Inc. | Pneumatic circuit for strapping tool having adjustable tension control |
| US5954899A (en) | 1998-04-03 | 1999-09-21 | Illinois Tool Works Inc. | Strap welding tool with base plate for reducing strap column strength and method therefor |
| CN2346694Y (en) | 1998-05-04 | 1999-11-03 | 张捷晃 | Portable electric bundle |
| US6003578A (en) | 1998-05-04 | 1999-12-21 | Chang; Jeff Chieh Huang | Portable electrical wrapping apparatus |
| JP3054566U (en) * | 1998-05-20 | 1998-12-08 | 捷晃 張 | Portable electric band hanging machine |
| DE59907362D1 (en) | 1998-10-29 | 2003-11-20 | Orgapack Gmbh Dietikon | strapping tool |
| EP0997377B1 (en) | 1998-10-29 | 2003-09-17 | Orgapack GmbH | Strapping device |
| ATE237500T1 (en) * | 1998-10-29 | 2003-05-15 | Orgapack Gmbh | STRAPING DEVICE |
| JP3242081B2 (en) | 1998-12-11 | 2001-12-25 | 鋼鈑工業株式会社 | Strap tightening welding tool |
| US6073664A (en) | 1999-02-13 | 2000-06-13 | Illinois Tool Works Inc. | Strap tensioning tool |
| DE19909620A1 (en) | 1999-03-05 | 2000-09-07 | Cyklop Gmbh | Device for tensioning and closing strapping |
| US6173747B1 (en) | 1999-03-24 | 2001-01-16 | Illinois Tool Works Inc. | Tensioning tool with biased collar valve actuator and method therefor |
| US6079457A (en) | 1999-04-09 | 2000-06-27 | Illinois Tool Works Inc. | Sealless strapping tool and method therefor |
| US6260337B1 (en) | 1999-10-27 | 2001-07-17 | Illinois Tool Works Inc. | Hand strapping tool |
| US6206053B1 (en) | 1999-11-01 | 2001-03-27 | Panduit Corp. | Cable tie tensioning and severing tool |
| US6415712B1 (en) | 1999-12-02 | 2002-07-09 | Enterprises International, Inc. | Track mechansim for guiding flexible straps around bundles of objects |
| US6584891B1 (en) | 2000-03-15 | 2003-07-01 | Enterprises International, Inc. | Apparatus and methods for wire-tying bundles of objects |
| DE10026197A1 (en) * | 2000-05-26 | 2001-12-06 | Cyklop Gmbh | Device for tensioning and closing strapping |
| DE10026198A1 (en) * | 2000-05-26 | 2001-11-29 | Cyklop Gmbh | Device for tensioning and closing plastic strapping |
| US6533013B1 (en) | 2000-06-02 | 2003-03-18 | Illinois Tool Works Inc. | Electric strapping tool and method therefor |
| AU6378001A (en) | 2000-06-06 | 2001-12-17 | Kim Michael Jensen | A method and an apparatus for twisting and tightening a wire |
| US6308745B1 (en) | 2000-06-21 | 2001-10-30 | Illinois Tool Works Inc. | Manually-operated sealing tool for joining end portions of plastic strapping, seal member, and sealed joint formed thereby |
| US6568158B2 (en) * | 2000-07-31 | 2003-05-27 | Strapack Corporation | Band-applying apparatus and method for use in packing system |
| US6405766B1 (en) | 2000-11-29 | 2002-06-18 | Eaton Corporation | Noise dampened float type fuel vapor vent valve |
| DE10065356C1 (en) | 2000-12-27 | 2002-09-12 | Gkn Automotive Gmbh | Electromechanical torque control - acceleration of the return |
| US20020134811A1 (en) | 2001-01-29 | 2002-09-26 | Senco Products, Inc. | Multi-mode power tool utilizing attachment |
| JP3699048B2 (en) | 2001-02-01 | 2005-09-28 | ハン イル エ ワ カンパニーリミテッド | Goods mounting clip |
| US6554030B2 (en) | 2001-03-19 | 2003-04-29 | Illinois Tool Works Inc. | Progressive punch |
| US6422272B1 (en) | 2001-04-04 | 2002-07-23 | Illinois Tool Works Inc. | Strap sealer with fast-acting dual action piston |
| EP1260439B1 (en) | 2001-05-21 | 2004-11-17 | Orgapack GmbH | Tying device presenting exchangable wear pieces |
| NZ519013A (en) | 2001-05-21 | 2003-05-30 | Orgapack Gmbh | Manually actuated strapping unit for wrapping a steel strap around a packaged item |
| NZ519012A (en) | 2001-05-21 | 2003-10-31 | Orgapack Gmbh | Manually actuated strapping unit for wrapping a steel strap around a packaged item |
| US6772798B2 (en) | 2001-05-25 | 2004-08-10 | Illinois Tool Works, Inc. | Strapping tool |
| DE10146460A1 (en) * | 2001-09-20 | 2003-04-17 | Cyklop Gmbh | Device for tensioning and closing strapping |
| JP2003170906A (en) | 2001-09-28 | 2003-06-17 | Strapack Corp | Packing method and packing machine |
| ATE380127T1 (en) | 2001-10-15 | 2007-12-15 | Antolin Grupo Ing Sa | ACCESSORY FASTENING SYSTEM FOR VEHICLE INTERIOR |
| JP2003231291A (en) | 2002-02-07 | 2003-08-19 | Fujitsu Component Ltd | Thermal printer |
| DE10218135B4 (en) * | 2002-04-23 | 2006-07-27 | Titan Umreifungstechnik Gmbh & Co Kg | Device for strapping goods with tape |
| JP4345260B2 (en) | 2002-05-20 | 2009-10-14 | パナソニック株式会社 | Electric tool with additional function |
| ATE364553T1 (en) | 2002-05-24 | 2007-07-15 | Orgapack Gmbh | PUNCHING TOOL FOR A STRAPPING DEVICE |
| JP2003348899A (en) | 2002-05-27 | 2003-12-05 | Matsushita Electric Ind Co Ltd | Control method for motor and control unit |
| US6907717B2 (en) | 2002-06-14 | 2005-06-21 | Illinois Tool Works, Inc. | Dual motor strapper |
| JP2005534199A (en) | 2002-07-26 | 2005-11-10 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | Use of GMR sensor elements and GMR sensor elements |
| US20040050188A1 (en) | 2002-09-13 | 2004-03-18 | Sparky Industries, Inc. | Portable sensor |
| ES2283737T3 (en) | 2002-10-25 | 2007-11-01 | Orgapack Gmbh | ASSEMBLY ASSEMBLY. |
| US7157882B2 (en) | 2002-11-22 | 2007-01-02 | Milwaukee Electric Tool Corporation | Method and system for battery protection employing a selectively-actuated switch |
| US6732638B1 (en) | 2003-01-15 | 2004-05-11 | Illinois Tool Works, Inc. | Time-out indicator for pneumatic strapper |
| JP2004241150A (en) | 2003-02-03 | 2004-08-26 | Yuasa Corp | Battery |
| US6911799B2 (en) | 2003-04-25 | 2005-06-28 | Illinois Tool Works, Inc. | Strapping machine weld motor control system |
| DE10345135A1 (en) | 2003-09-29 | 2005-04-21 | Bosch Gmbh Robert | Cordless drill/driver, comprising permanently installed lithium-ion battery, automatically charged when tool is positioned on storage base |
| DE20321137U1 (en) | 2003-09-29 | 2006-01-12 | Robert Bosch Gmbh | Cordless drill/driver, comprising permanently installed lithium-ion battery, automatically charged when tool is positioned on storage base |
| JP2004108593A (en) | 2003-12-18 | 2004-04-08 | Osaka Kakuta Kogyo Kk | Toggle clamp |
| ES2290843T3 (en) | 2004-02-13 | 2008-02-16 | Thomas & Betts International, Inc. | CYCLE COUNTER FOR TOOL-CABLE INSTALLATION TOOL. |
| US7236243B2 (en) | 2004-04-12 | 2007-06-26 | Michael Thomas Beecroft | Hand-held spectrometer |
| JP2006000993A (en) | 2004-06-21 | 2006-01-05 | Maeda Metal Industries Ltd | Fastening machine with reaction receiver |
| TWI322783B (en) | 2004-11-04 | 2010-04-01 | Orgapack Gmbh | A friction welding equipment for a packaging machine |
| US20060108180A1 (en) | 2004-11-24 | 2006-05-25 | Lincoln Industrial Corporation | Grease gun |
| US7073431B1 (en) * | 2005-05-18 | 2006-07-11 | Yu-Fu Chen | Structure portable strapping machine |
| US7155885B1 (en) | 2005-06-28 | 2007-01-02 | Illinois Tool Works, Inc. | Small profile strapping tool |
| DE102005049130A1 (en) | 2005-10-14 | 2007-04-19 | Robert Bosch Gmbh | Hand tool |
| CA2527162A1 (en) | 2005-11-16 | 2007-05-16 | Traction Technologies Inc. | Self-tensioning tie down assembly |
| US7556129B2 (en) | 2005-12-14 | 2009-07-07 | Illinois Tool Works, Inc, | Motor brake |
| US7455080B2 (en) | 2006-01-26 | 2008-11-25 | Illinois Tool Works Inc. | Manual tensioner for non-metallic straps |
| DE102006007990A1 (en) | 2006-02-21 | 2007-08-30 | Robert Bosch Gmbh | Hand-operated machine tool e.g. battery-operated drilling machine, for machining work piece, has measuring unit for transmitting measuring signal, where work progress parameter is implemented as geometrical parameter of measuring signal |
| KR200419048Y1 (en) | 2006-03-17 | 2006-06-16 | 엘에스산전 주식회사 | A Mould Cased Circuit Breaker |
| JP4961808B2 (en) | 2006-04-05 | 2012-06-27 | マックス株式会社 | Rebar binding machine |
| US7350543B2 (en) | 2006-05-09 | 2008-04-01 | Illinois Tool Works Inc. | Reduced force sealless connection mechanism |
| JP2008055563A (en) | 2006-08-31 | 2008-03-13 | Matsushita Electric Works Ltd | Power tool |
| ES2393573T3 (en) | 2007-02-14 | 2012-12-26 | Orgapack Gmbh | Strapping device |
| US7866904B2 (en) | 2007-03-06 | 2011-01-11 | Datacard Corporation | Desktop card printer with indent printing apparatus and method of printing |
| US7497068B2 (en) | 2007-07-10 | 2009-03-03 | Illinois Tool Works Inc. | Two-piece strapping tool |
| CN101164416B (en) | 2007-10-15 | 2010-06-02 | 嘉兴市威尔美尼机械制造有限公司 | High-speed binding machine |
| US8584973B2 (en) | 2007-10-31 | 2013-11-19 | Nordson Corporation | Powder coating gun with manually operated controls on gun |
| US8356641B2 (en) | 2007-11-02 | 2013-01-22 | Band-It-Idex, Inc. | Stationary band clamping apparatus |
| US7562620B1 (en) | 2008-01-30 | 2009-07-21 | Illinois Tool Works, Inc. | Strapping tool |
| RU2355821C1 (en) | 2008-04-11 | 2009-05-20 | Закрытое акционерное общество Фирма "Автоконинвест" | Composition for protection of metals against corrosion and scale |
| US9284080B2 (en) | 2008-04-23 | 2016-03-15 | Signode Industrial Group Llc | Mobile strappiing device |
| US9315283B2 (en) | 2008-04-23 | 2016-04-19 | Signode Industrial Group Llc | Strapping device with an energy storage means |
| CN201411061Y (en) | 2008-04-23 | 2010-02-24 | 奥格派克有限公司 | Strapping equipment provided with transmission device |
| ES2861948T3 (en) | 2008-04-23 | 2021-10-06 | Signode Int Ip Holdings Llc | Strapping device with an electric drive |
| US10518914B2 (en) * | 2008-04-23 | 2019-12-31 | Signode Industrial Group Llc | Strapping device |
| US8567310B2 (en) | 2008-07-17 | 2013-10-29 | Xiaojie Yi | Electric hand-held binding apparatus |
| US9061392B2 (en) | 2008-07-25 | 2015-06-23 | Sylvain Forgues | Controlled electro-pneumatic power tools and interactive consumable |
| CN101486329B (en) | 2009-02-13 | 2012-02-22 | 浙江双友物流器械股份有限公司 | Binding machine |
| CN101585244A (en) | 2009-03-25 | 2009-11-25 | 张瑞东 | Dual-motor power-operated baling press |
| ATE530449T1 (en) | 2009-04-24 | 2011-11-15 | Sund Birsta Ab | STRAPPING UNIT AND METHOD |
| USD653923S1 (en) | 2009-10-30 | 2012-02-14 | Illinois Tool Works Inc. | Tool |
| USD629321S1 (en) | 2009-10-30 | 2010-12-21 | Illinois Tool Works Inc. | Control panel for tool |
| USD651498S1 (en) | 2009-10-30 | 2012-01-03 | Illinois Tool Works Inc. | Tool |
| DE102009047443B4 (en) | 2009-12-03 | 2024-04-11 | Robert Bosch Gmbh | Hand tool machine |
| US8919174B2 (en) | 2010-03-12 | 2014-12-30 | Signode Industrial Group Llc | Front action sealing tool |
| US8707785B2 (en) | 2010-04-16 | 2014-04-29 | U.E. Systems, Inc. | On-board ultrasonic frequency spectrum and image generation |
| US9296501B2 (en) | 2010-07-22 | 2016-03-29 | Signode Industrial Group Llc | Modular strap feeder with motor for indexing and gripping |
| US8281711B2 (en) | 2011-01-04 | 2012-10-09 | Illinois Tool Works Inc. | Modular feed head with reversing motor |
| CN201957492U (en) | 2011-01-18 | 2011-09-07 | 苏州金莱克精密机械有限公司 | Handheld electric tool with improved trigger |
| US8967217B2 (en) * | 2011-02-22 | 2015-03-03 | Signode Industrial Group Llc | Hand-held strapper |
| US20140008090A1 (en) | 2011-03-31 | 2014-01-09 | Ingersoll-Rand Company | Handheld Power Tools with Triggers and Methods for Assembling Same |
| WO2012134469A1 (en) | 2011-03-31 | 2012-10-04 | Ingersoll-Rand Company | Display assemblies having integrated display covers and light pipes and handheld power tools and methods including same |
| CN202100012U (en) | 2011-05-30 | 2012-01-04 | 袁炽坤 | Multifunctional reinforcement bar binding machine |
| GB2481724B (en) | 2011-07-13 | 2012-10-03 | Chien-Fa Lai | Feeding and reversing mechanism for a strapping machine |
| US9272799B2 (en) | 2011-10-04 | 2016-03-01 | Signode Industrial Group Llc | Sealing tool for strap |
| US8960323B2 (en) | 2011-10-18 | 2015-02-24 | Robert Bosch Gmbh | Semi-active anti-vibration systems for handheld electrical power tools |
| CH705745A2 (en) | 2011-11-14 | 2013-05-15 | Illinois Tool Works | Strapper. |
| CH705744A2 (en) | 2011-11-14 | 2013-05-15 | Illinois Tool Works | Strapper. |
| CH705743A2 (en) | 2011-11-14 | 2013-05-15 | Illinois Tool Works | Strapper. |
| DE102011122157A1 (en) | 2011-12-23 | 2013-06-27 | Fromm Holding Ag | strapping tool |
| US9221567B2 (en) * | 2012-01-25 | 2015-12-29 | Southern Bracing Systems Enterprises, Llc | Systems, methods, and devices for tensioning straps |
| US9387573B2 (en) | 2012-06-07 | 2016-07-12 | Signode Industrial Group Llc | Symmetrical overlapping jaw front action sealing tool |
| US9468968B2 (en) | 2012-08-30 | 2016-10-18 | Signode Industrial Group Llc | Battery powered tensioning tool for strap |
| JP6329151B2 (en) | 2012-09-24 | 2018-05-23 | シグノード インターナショナル アイピー ホールディングス エルエルシー | Banding device |
| EP2711301B1 (en) | 2012-09-24 | 2016-11-02 | S.I.A.T. SOCIETA' INTERNAZIONALE APPLICAZIONI TECNICHE S.p.A. | Mobile strapping device |
| CH708294A2 (en) | 2013-05-05 | 2014-12-15 | Orgapack Gmbh | Strapper. |
-
2013
- 2013-09-24 JP JP2015532526A patent/JP6329151B2/en active Active
- 2013-09-24 CH CH01629/13A patent/CH707028A2/en not_active Application Discontinuation
- 2013-09-24 EP EP13821914.2A patent/EP2897867B1/en active Active
- 2013-09-24 JP JP2015532524A patent/JP6412003B2/en active Active
- 2013-09-24 WO PCT/IB2013/002116 patent/WO2014167377A1/en active Application Filing
- 2013-09-24 CH CH01630/13A patent/CH707027A2/en not_active Application Discontinuation
- 2013-09-24 WO PCT/IB2013/002132 patent/WO2014072775A1/en active Application Filing
- 2013-09-24 CN CN201380061441.6A patent/CN104870315B/en active Active
- 2013-09-24 ES ES13805503T patent/ES2895662T3/en active Active
- 2013-09-24 ES ES13821914T patent/ES2752195T3/en active Active
- 2013-09-24 US US14/430,151 patent/US9932135B2/en active Active
- 2013-09-24 EP EP13805503.3A patent/EP2897866B1/en active Active
- 2013-09-24 CN CN201380061245.9A patent/CN105324310B/en active Active
- 2013-09-24 US US14/430,163 patent/US9938029B2/en active Active
-
2018
- 2018-03-02 US US15/910,346 patent/US10370132B2/en active Active
-
2019
- 2019-06-21 US US16/448,167 patent/US11267596B2/en active Active
-
2022
- 2022-03-04 US US17/653,581 patent/US11560245B2/en active Active
-
2023
- 2023-01-04 US US18/149,827 patent/US11667417B2/en active Active
- 2023-04-25 US US18/306,547 patent/US11932430B2/en active Active
-
2024
- 2024-02-23 US US18/585,842 patent/US20240199253A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6109325A (en) * | 1999-01-12 | 2000-08-29 | Chang; Jeff Chieh Huang | Portable electrical binding apparatus |
| DE10026200A1 (en) * | 2000-05-26 | 2001-11-29 | Cyklop Gmbh | Device for tensioning strapping |
| WO2009129636A1 (en) * | 2008-04-23 | 2009-10-29 | Orgapack Gmbh | Strapping device with a tensioner |
| DE202011050797U1 (en) * | 2011-07-22 | 2011-11-11 | Pantech International Inc. | Rocker arm assembly of a strapping machine |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2897866B1 (en) | Strapping device having a pivotable rocker | |
| CH708294A2 (en) | Strapper. | |
| EP0999132B1 (en) | Strapping device | |
| EP0997377B1 (en) | Strapping device | |
| DE2720027C3 (en) | Tying tool for twisting the free ends of a binding wire | |
| EP1283797B1 (en) | Device for tightening strapping bands | |
| EP0999133B1 (en) | Strapping device | |
| DE2700533C3 (en) | Device for forming a tensioned tape loop around a packaging | |
| DE1536270C2 (en) | Device for tying objects | |
| DD202269A5 (en) | DEVICE FOR TIGHTENING, CLOSING AND CUTTING PLASTIC PATCHES FOR PACKAGE ATTACHMENTS | |
| DE3028729A1 (en) | CONVERSION DEVICE | |
| CH712984A2 (en) | Strapping device for strapping packaged goods with a strapping band. | |
| EP3105126B1 (en) | Tensioning device for a strapping device | |
| EP0894718B1 (en) | Device for introducing a strap in a strapping machine | |
| EP0357902B1 (en) | Device for tensioning and sealing a plastic tying strap | |
| DE3819135C1 (en) | ||
| EP3556667B1 (en) | Strapping device | |
| DE719423C (en) | Device for binding bundled letters, documents, objects and the like. like | |
| DE1945837C (en) | Device for tying a pack | |
| DE1586827C (en) | Device for automatic tensioning of the packaging tape in tying machines | |
| DE1923907C3 (en) | Device for welding partially overlapping strips of thermoplastic material by means of frictional heat | |
| DE281799C (en) | ||
| DE1586502C (en) | Clamping device for tapes, especially made of plastic, textiles and the like | |
| DE566004C (en) | Device for tying boxes, bales or the like with wire | |
| EP0415272A1 (en) | Arrangement on a strapping device for tensioning a loop encircling an object to be strapped |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20150423 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAX | Request for extension of the european patent (deleted) | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20171207 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| PUAG | Search results despatched under rule 164(2) epc together with communication from examining division |
Free format text: ORIGINAL CODE: 0009017 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20181207 |
|
| B565 | Issuance of search results under rule 164(2) epc |
Effective date: 20181207 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B65B 13/02 20060101ALI20181204BHEP Ipc: B65B 13/18 20060101ALI20181204BHEP Ipc: B65B 13/32 20060101ALI20181204BHEP Ipc: B65B 13/22 20060101AFI20181204BHEP |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20210215 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1416764 Country of ref document: AT Kind code of ref document: T Effective date: 20210815 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502013015866 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211104 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211206 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211104 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2895662 Country of ref document: ES Kind code of ref document: T3 Effective date: 20220222 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211105 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502013015866 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20220506 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210924 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210924 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1416764 Country of ref document: AT Kind code of ref document: T Effective date: 20210924 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210924 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20130924 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20230921 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20230927 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20231002 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20231004 Year of fee payment: 11 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20240820 Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210804 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240820 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20240822 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240820 Year of fee payment: 12 |