EP2247823B1 - Verfahren zum steuern von strebbetrieben - Google Patents
Verfahren zum steuern von strebbetrieben Download PDFInfo
- Publication number
- EP2247823B1 EP2247823B1 EP08715851.5A EP08715851A EP2247823B1 EP 2247823 B1 EP2247823 B1 EP 2247823B1 EP 08715851 A EP08715851 A EP 08715851A EP 2247823 B1 EP2247823 B1 EP 2247823B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- shield
- support frame
- shield support
- inclination
- top canopy
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
- 238000000034 method Methods 0.000 title claims description 35
- 238000005065 mining Methods 0.000 title claims description 29
- 238000000605 extraction Methods 0.000 claims description 16
- 230000001133 acceleration Effects 0.000 claims description 7
- 238000005452 bending Methods 0.000 claims description 5
- 239000003245 coal Substances 0.000 claims description 4
- 230000007246 mechanism Effects 0.000 claims description 3
- 238000013016 damping Methods 0.000 claims description 2
- 230000001419 dependent effect Effects 0.000 claims description 2
- 238000010521 absorption reaction Methods 0.000 claims 1
- 230000005484 gravity Effects 0.000 claims 1
- 239000011435 rock Substances 0.000 claims 1
- 238000001514 detection method Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 5
- 238000010276 construction Methods 0.000 description 5
- 206010019133 Hangover Diseases 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 238000011156 evaluation Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000011084 recovery Methods 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000009194 climbing Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000010008 shearing Methods 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 241000406668 Loxodonta cyclotis Species 0.000 description 1
- 235000014676 Phragmites communis Nutrition 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 230000009189 diving Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000011440 grout Substances 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 238000004886 process control Methods 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000004826 seaming Methods 0.000 description 1
- 230000001953 sensory effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images





Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21D—SHAFTS; TUNNELS; GALLERIES; LARGE UNDERGROUND CHAMBERS
- E21D23/00—Mine roof supports for step- by- step movement, e.g. in combination with provisions for shifting of conveyors, mining machines, or guides therefor
- E21D23/12—Control, e.g. using remote control
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21C—MINING OR QUARRYING
- E21C35/00—Details of, or accessories for, machines for slitting or completely freeing the mineral from the seam, not provided for in groups E21C25/00 - E21C33/00, E21C37/00 or E21C39/00
- E21C35/282—Autonomous machines; Autonomous operations
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21C—MINING OR QUARRYING
- E21C35/00—Details of, or accessories for, machines for slitting or completely freeing the mineral from the seam, not provided for in groups E21C25/00 - E21C33/00, E21C37/00 or E21C39/00
- E21C35/302—Measuring, signaling or indicating specially adapted for machines for slitting or completely freeing the mineral
Definitions
- the invention relates to a method for controlling a longwall conveyor, at least one mining machine and a hydraulic shield removal having longwall mining operations in underground coal mining.
- a method of the aforementioned type is in the DE 196 36 389 A1 described, in which a load control of the shield removal point is provided, in which the critical load cases "unilateral load” and / or “peak dance” detected during the setting process using appropriate sensors and rendered harmless by appropriate control of the hydraulic punch and / or a corner cylinder in their impact become.
- sensors are arranged on the components of the shield-mounting frame whose electrical measured values are used by a control unit for evaluating the measuring signals and for controlling the hydraulic punches and / or the corner cylinder assigned to the shield-mounting frame.
- Controlling struts during pillage is generally about making the best possible use of the resources provided Machine capacities while avoiding stoppages, where possible, an automation of the necessary control operations should be given to avoid erroneous human decisions.
- Approaches to automation of the controller are in development or already in use, such as sensory boundary layer detection / control, learning step method, detection and control of the way back of the walking structure, automated pacing of the walking structure and automatic compliance with a predetermined nominal inclination of the longwall conveyor.
- the invention is therefore based on the object to show a method of the type mentioned above, which gives indications of a possible collision between the mining machine and the shield support frame and thereby helps to avoid corresponding collisions.
- the invention provides a method in which inclination sensors mounted on at least three of the four main components of each shield support structure such as bottom skid, breaker shield, support links, and fractured section of the hangum cap determine the inclination of the shield components against the horizontal in the direction of travel and from the measured data in a computing unit by comparison with the stored therein, the geometric orientation of the components and their movement during walking defining basic data, the respective banking rights height of the shield support frame is calculated at the front end of the hanging wall as a measure of the longwall.
- the invention initially has the advantage that solely due to the geometrical conditions to be determined with a comparatively low outlay when using the shield extension, the front end of the hanging wall can be determined in the form of the bank-legal height determined for this point; as long as this Strebö réelle the produced by the mining machine during their scheduled operation Strebö réelle corresponds or is slightly larger, there is no risk of a collision of the mining machine with the relevant Schildausbaugestellen. If the constant monitoring of the longwall opening at the front end of the hang-end cap results in a too small bracing opening, an impending collision can be counteracted by a corresponding activation of the mining machine.
- the data obtained at individual shield extension points provide additional information about the behavior of individual sections of the front panel or the entire front panel as the penetration progresses, which enables integral process control of the respective mining operation.
- Adjustment limit of the shield extension in a targeted automatic operation threatens.
- the danger of a landing of the hanging wall then exists when entering the convergence of the shield temples are completely retracted and due to the then overburdening wall hanging the shield expansion block is blocked and can not be brought forward;
- Another possibility is that the steel construction at the lower Verstellalia in Lemniskatengetriebe the shield support frame or in the joint hanging end cap / rupture shield blocked and then can not be brought forward.
- the above moments of danger apply in particular to the passage of saddles or depressions in the course of the seam, which can be accommodated by a corresponding device of the recovery height of the respective recovery machine used.
- the corresponding face opening data can provide information about a possible fall from the hanging, the occurrence of seaming, the "on-coal driving" give the mining machine or a possible lying incision of the mining machine.
- Schildausbaugestelle be used in a design with divided Bodenkufe in which between the two single skids the walking mechanism of Schildbausbaestestells is arranged so that the two individual runners of Schildschild rack are in contrast to interconnected runners segregated from each other separately can, whereby the so-called Elephant Step is possible as a step control.
- the so-called Elephant Step is possible as a step control.
- Shield extension points on each individual skids one inclination sensor is arranged.
- the respective height of the shield is calculated from the measured angles of inclination for the hangover cap, the breaker plate and for the right and left individual skids of the shield support frame, it being possible to provide that the height of the shield determined for the shield support frame the mean value of the height values calculated for the two individual skids is calculated.
- a single evaluation of the height of the sign is required for the right and left half of the sign based on the inclination angle determined on the single runners.
- the inclination sensors attached to the shield components are placed at locations with a minimum bending angle of the components, this serves to minimize measurement errors under load.
- the stamp of the walking frame is determined by means of pressure sensors of the internal stamp pressure.
- a correction factor taking into account the bending load in practical use of the longwall support station can be used as a function of the respective load recorded during operation, as provided according to an exemplary embodiment of the invention.
- the inclination of the hanging end cap against the horizontal, transverse to the direction of travel is ascertained via the inclination sensor attached to the hanging end cap of the shielding structure.
- the screwing height of the hanging end cap may be reduced, or the hanging end cap in the dressing may be aligned with adjacent shild support points prior to the shearing cycle, or the shearing cycle may be discontinued prior to re-setting the shingling frame concerned if that shim assembly has fallen out of the association; then there is also a correction.
- the determined for a shield frame position associated with the extraction machine roller cutting height is assigned by means of a location-synchronous evaluation of the temporal expansion delay of the hanging wall of the associated shield expansion rack determined for this position Strebö réelle.
- expansion delay the fact is taken into account that the Strebö réelle made by the mining machine is reached from the top of the hanging end cap of the associated shield support frame until one or two expansion steps later, which is referred to as expansion delay.
- the height data can be used at one and the same location.
- historical cutting height data are set in the mentioned arithmetic unit and set in the comparison with the shield data at the same spatial coordinate as soon as the shield expansion frame has reached the corresponding spatial coordinate. This procedure can also be referred to as location-synchronous evaluation.
- the control method according to the invention is further improved by determining the inclination of the conveyor and / or mining machine against the horizontal in the direction of travel of the shield extension by means of inclination sensors attached to the conveyor and / or mining machine.
- the arrangement of an inclination sensor on the mining machine is sufficient.
- the mining machine carried on and guided by the walkway conveyor is, so to speak, integral with the longwall conveyor, to improve the accuracy of the control, it may be convenient to also detect the slope of the longwall conveyor via a tilt sensor disposed thereon.
- the arrangement of an inclination sensor only on the longwall conveyor for the purpose of the control also sufficient.
- the angle of inclination of conveyor and / or mining machine set in relation to the determined at the bottom of the skid frame and / or Hangendkappe tilt angle and the differential angle formed in the calculation of the case of several consecutive Schreitzyklen the Schildausbaugestells adjusting Strebö réelle is included.
- the height values describing the geometry of the shield support frame are recorded at the front end of the hanging end cap, in the region of the starting point of the punches on the hanging end cap and in the region of the hanging wall end cap and shield cap over the time axis, and from changes in the measured values over the time axis the convergence caused by the loading mountain is determined.
- Convergence is the decrease in the height of the respective longwall opening in relation to the initial height. From the shield replacements deployed, the convergence of a single rack can be determined from step to step at each location where the shield rack has been deployed.
- the temporal course of convergence is decisive.
- the position of the shield support frame with respect to the initiation of expansion support forces is determined by the position of the Hangendkappe to the course of the hanging on the position of the breaking edge is closed over the hanging cap. In this way, technically unfavorable positions of the shield support frame can be detected and taken into account and corrected accordingly in subsequent cycle cycles.
- acceleration sensors are used as inclination sensors which detect the angular position of the acceleration sensor in space via the deviation from the gravitational acceleration.
- the measured values ascertained by the acceleration sensors are checked and corrected by means of a suitable damping method.
- the position of the individual shield extension is made visually visible in a display unit, wherein it can be useful if recognized as a risk deviations from predetermined target values in the display unit are displayed in a conspicuous color ,
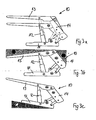
- longwall equipment comprises first a shield support frame 10 with a bottom skid 11 on which two punches 12 are attached in a parallel arrangement, of which in FIG. 1 only one stamp is recognizable and carry a hanging end cap 13 at its upper end. While the Hangendkappe 13 protrudes at its front (left) end in the direction of the still to be described extraction machine, at the rear (right) end of the Hangendkappe 13 a crash plate 14 is articulated by means of a hinge 15, wherein the broken shield of the two in the side view on the Bodenkufe 11 resting support arms 16 is supported.
- three inclination sensors 17 are mounted in the illustrated embodiment, namely a tilt sensor 17 on the Bodenkufe 11, a tilt sensor 17 in the rear of the hanging wall 13 in the vicinity of the hinge 15 and a tilt sensor 17 on the fracture shield 14.
- the support arms 16, also a tilt sensor, of the four possible tilt sensors 17 three inclination sensors must be installed in order to determine the position of the shield support frame in a working space with the determined inclination values
- the in FIG. 1 tilt sensor 17 shown in the rear of the hanging wall 13 are displaced in the front cap area, if in the cap profile for this purpose a protected space is available.
- the invention is not limited to the concrete in FIG. 1 illustrated arrangement of the inclination sensors limited, but includes all possible combinations of three inclination sensors to the four moving parts of the shield support frame.
- FIGS. 8a to 8c This can be done in FIGS. 1 or 2 shown in a side view shield support frame 10 while basically have three types with respect to its Bodenkufe.
- the Bodenkufe 11 consists of two partial skids, which are, however, firmly connected to each other via a solid steel structure 28, so that there is a so-called “tunnel skid".
- this tunnel skid has a better height mobility, but it comes to higher surface pressures and thus to a higher tendency to sink the two skids in the lying.
- the Bodenkufe be formed with two partial runners, which are connected to each other via a bottom plate 29, so that there is a larger bearing surface for the Bodenkufe.
- the surface pressure and thus the tendency is reduced that the Schildausbaugestelle in particular in the area of the tip tip in the Push in lying down.
- this design limits the mobility for rapid changes in the height of the sign, because in particular at a rapid increase in the height of the sign, the stepping 37 can not follow a fast emerging longwall conveyor, because the walker then abuts the closed floor panel 29, which limits the possibility of height adjustment.
- FIG. 8c an embodiment is shown, which is preferably used in planing operations at a low seam thickness, such as below 1.5m.
- separate individual runners 35 and 36 are provided, between which the walking mechanism 37 is arranged such that the right-hand runner 35 in the direction of travel can be lifted independently of the left-hand runner 36 in the walking direction.
- This separation of the individual runners 35 and 36 allows the steps of the shield support frame 10 in the so-called Elephant-Step, by means of which a sinking of the two single skids 35 and 36 in the horizontal 23 and accumulation and postponement of debris in front of the individual runners 35, 36 can be counteracted.
- FIG. 1 illustrated shield support frame 10 is struck on a longwall conveyor 20, which also has a tilt sensor 21, so that in terms of the control of the longwall equipment in general also here data regarding the conveyor position can be obtained.
- a recovery machine in the form of a Walzenschrämladers 22 is guided with an upper roller 23 and a lower roller 24, wherein a tilt sensor 25 is disposed in the region of the Walzenschrämladers 22, further, a sensor 26 for detecting the respective location of the Walzenschrämladers 22 in Strut and reed rods 27 for measuring the cutting height of the Walzenschrämladers 22.
- the metrological equipment of the longwall equipment is complemented by the arrangement of sensors 18 on the punches 12, by means of which the change in the altitude of the hanging wall 13 by determining the dropout height of the punch 12 is possible. Furthermore, a Wegmesssystem 19 is integrated in the Bodenkufe 11, by means of which the respective Schreithub the shield support frame 10 in relation to the longwall conveyor 20 can be determined.
- the arrangement of the inclination sensor 21 on the longwall conveyor 20 is not absolutely necessary as long as the inclination sensor 25 is set up on the drum skid loader 22. In such a case, however, the inclination sensor 21 may be additionally provided to improve the measurement accuracy.
- the shield support frame 10 can be due to the known kinematics of the shield support frame 10 depending on the position of Bodenkufe 11, 14 Bruchschild and Hangendkappe 13 to each other determine the heights h 1 , h 2 and h 3 , wherein the height h 1 for determining the bank level height of the longwall 30, while the height h 2 is a measure of a possible overhang in a fully extended shield frame stand or for annensetzergefahr, while the height h 3 can be used to consider the convergence.
- the determination of the heights h 1 , h 2 and h 3 can The values measured by these sensors 17 are compared in a computing unit (not shown) with the basic data stored therein for the geometric alignment of the components and their movement behavior relative to one another.
- a computing unit not shown
- the individual shield expansion point 10 are calibrated after their installation in the longwall equipment by measuring the hang-end cap 13, the fracture shield 14 and the bottom skid 11 by means of a hand-held inclinometer in the installed state and the measured values are entered into the corresponding control of the shield construction frame 10. If the altitude values h 1 , h 2 and h 3 are then displayed in the blade control, these height values can be measured with tape measures and then the inclination sensors can be calibrated accordingly.
- the conveyor 20 to which the respective individual shield removal point 10 of the longwall equipment are struck, as well as guided on the conveyor 20 extraction machine 22 in the form of a Walzenschrämladers 19 with an upper roller 23 and a lower roller 24th be equipped with appropriate inclination sensors, so that the inclusion of these inclination values, the total determined roller cutting height of the Walzenschrämladers 22 can be set in relation to the provided by the Schildausbaugestellen 10 Strebö réelle 30.
- a risk of collision in the region of the front edge of the Hangendkappe 13 sets.
- the height values h 1 , h 2 and h 3 can also give information about the inevitable in underground operation by loading the hanging wall 31 on the hangover cap 13 of standing on the floor 32 Shield frame 10 resulting convergence, as indicated by the loading arrows 34 , Between the hanging wall 31 and the lying 32 is in FIG. 5 schematically the coal burst 33 shown.
- shielding expansion frame 10 In the position determined by the values of the tilt sensors 17 in FIG. 6 illustrated shielding expansion frame 10 is the breaking edge 35 in the rear region of the hanging wall 13, which means that the load capacity of the shielding rack is optimally utilized, because the introduction of the expansion forces in the area of the shielding rack takes place, in which the best possible effect can be achieved with respect to the hillside control. Eventual, on the surface of the Hangendkappe 13 forming mountain upholstery can be stripped when walking the shield support frame 10. The Bodenkufe stands slightly rising and can thus slide well on possibly on itself on the footwall 32 forming heap. The result of such a position of the shield support frame 10 is that hardly any debris is to be expected when advancing the expansion, so that optionally also an automatic and trouble-free operation of the longwall equipment is possible.
- the inclination measurement data obtained at individual shielding outstations 10 as well as at conveyors 20 and mining machine 22 it is also possible with the inclination measurement data obtained at individual shielding outstations 10 as well as at conveyors 20 and mining machine 22 to record the behavior of the longwall equipment overall over the entire length of the strut. For example, deviations occur in individual areas of the strut due to geological anomalies such as saddle or trough areas As the extraction and expansion work to other areas of the strut, the corresponding problem areas in the monitoring are immediately visible, so that in these areas, the extraction and expansion work can be adjusted in a targeted manner accordingly.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Excavating Of Shafts Or Tunnels (AREA)
- Piles And Underground Anchors (AREA)
- Lining And Supports For Tunnels (AREA)
Description
- Die Erfindung betrifft ein Verfahren zum Steuern von einen Strebförderer, wenigstens eine Gewinnungsmaschine sowie einen hydraulischen Schildausbau aufweisenden Strebbetrieben im untertägigen Steinkohlenbergbau.
- Ein Verfahren der vorgenannten Art ist in der
DE 196 36 389 A1 beschrieben, bei welchem eine Laststeuerung der Schildausbaugestelle vorgesehen ist, bei welcher die kritischen Lastfälle "einseitige Belastung" und/oder "Spitzentanz" schon beim Setzvorgang mithilfe entsprechender Sensoren erfasst und durch entsprechende Ansteuerung der hydraulischen Stempel und/oder eines Eckzylinders in ihrer Auswirkung unschädlich gemacht werden. Zur Durchführung dieses Verfahrens sind an den Bauteilen des Schildausbaugestells Sensoren angeordnet, deren elektrische Messwerte einem Steuergerät zur Auswertung der Messsignale und zur Ansteuerung der hydraulischen Stempel und/oder des dem Schildausbaugestell zugeordneten Eckzylinders genutzt werden. - Bei der Steuerung von Strebbetrieben während des Verhiebs geht es allgemein um eine bestmögliche Ausnutzung der bereitgestellten Maschinenkapazitäten unter Vermeidung von Stillständen, wobei nach Möglichkeit eine Automatisierung der notwendigen Steuervorgänge gegeben sein soll, um fehlerhafte menschliche Entscheidungen zu vermeiden. Ansätze zu einer Automatisierung der Steuerung befinden sich in der Entwicklung beziehungsweise bereits im Einsatz, wie zum Beispiel sensorische Grenzschichterkennung/-steuerung, Lernschritt-Verfahren, Erkennung und Steuerung des Rückweges des Schreitausbaus, automatisiertes Schreiten des Schreitausbaus und automatisches Einhalten einer vorgegebenen Sollneigung des Strebförderers.
- Ein Problem bei der Automatisierung von Strebsteuerungen besteht unter anderem darin sicherzustellen, dass im vorderen Bereich der Hangendkappe jedes einzelnen Schildausbaugestells eine ausreichende bankrechte Höhe, dass heißt eine ausreichende Streböffnung, vorhanden ist, um eine störungsfreie Vorbeifahrt der Gewinnungsmaschine zu gewährleisten, da jede Kollision der Gewinnungsmaschine mit der Hangendkappe des Schildausbaugestells aufgrund einer zu kleinen Streböffnung zu entsprechenden Betriebsstörungen beziehungsweise auch Beschädigungen der Betriebsmittel führt.
- Der Erfindung liegt daher die Aufgabe zugrunde, ein Verfahren der eingangs genannten Art aufzuzeigen, welches Hinweise auf eine mögliche Kollision zwischen der Gewinnungsmaschine und dem Schildausbaugestell gibt und dadurch entsprechende Kollisionen vermeiden hilft.
- Die Lösung dieser Aufgabe ergibt sich einschließlich vorteilhafter Ausgestaltungen und Weiterbildungen der Erfindung aus dem Inhalt der Patentansprüche, welche dieser Beschreibung nachgestellt sind.
- Die Erfindung sieht im einzelnen ein Verfahren vor, bei welchem an wenigstens drei der vier Hauptbauteile jedes Schildausbaugestells wie Bodenkufe, Bruchschild, Traglenkern und bruchseitigem Bereich der Hangendkappe angebrachter Neigungssensoren die Neigung der Schildbauteile gegen die Horizontale in Schreitrichtung ermittelt und aus den gemessenen Daten in einer Rechnereinheit durch Vergleich mit den darin abgelegten, die geometrische Ausrichtung der Bauteile und deren Bewegung während des Schreitens definierenden Basisdaten die jeweilige bankrechte Höhe des Schildausbaugestells an dem vorderen Ende der Hangendkappe als Maß für die Streböffnung berechnet wird.
- Mit der Erfindung ist zunächst der Vorteil verbunden, dass allein aufgrund der mit einem vergleichsweise geringen Aufwand zu ermittelnden geometrischen Verhältnisse beim Einsatz der Schildausbaugestelle die am vorderen Ende der Hangendkappe bestehende Streböffnung in Form der für diese Stelle ermittelten bankrechten Höhe zu ermitteln ist; solange diese Streböffnung der von der Gewinnungsmaschine bei deren planmäßigem Betrieb hergestellten Streböffnung entspricht bzw. etwas größer ist, besteht das Risiko einer Kollision der Gewinnungsmaschine mit den betreffenden Schildausbaugestellen nicht. Ergibt die ständige Überwachung der Streböffnung am vorderen Ende der Hangendkappe eine zu geringe Streböffnung, kann durch ein entsprechendes Ansteuern der Gewinnungsmaschine einer drohenden Kollision entgegengewirkt werden. In einer weiterhin vorteilhaften Weise geben die an einzelnen Schildausbaugestellen gewonnenen Daten zusätzlichen Aufschluss über das Verhalten von einzelnen Abschnitten der Strebfront beziehungsweise der gesamten Strebfront bei fortschreitendem Verhieb, welches eine integrale Prozesssteuerung des jeweiligen Abbaubetriebes ermöglicht.
- So kann aus dem Verhältnis der Streböffnung zu den für den jeweiligen Abbaubetrieb geltenden Lagerstättendaten, wie beispielsweise die sich gegebenenfalls über die Länge des Strebes ändernde Flözmächtigkeit, darauf geschlossen werden, ob die Gefahr eines Aufsetzen des Hangenden auf den Schildausbaugestellen besteht oder ob ein Überschreiten der oberen Verstellgrenze der Schildausbaugestelle bei einem angestrebten Automatikbetrieb droht. Die Gefahr eines Aufsetzens des Hangenden besteht dann, wenn bei eintretender Konvergenz die Schildstempel ganz eingefahren sind und aufgrund des dann auflastenden Hangenden das Schildausbaugestell blockiert ist und nicht mehr vorgezogen werden kann; eine weitere Möglichkeit besteht darin, dass der Stahlbau an der unteren Verstellgrenze im Lemniskatengetriebe des Schildausbaugestells oder im Gelenk Hangendkappe/Bruchschild blockiert und auch dann nicht mehr vorgezogen werden kann. Die vorstehenden Gefahrenmomente gelten insbesondere für das Durchfahren von Sätteln oder Mulden im Flözverlauf, dem durch eine entsprechende Einrichtung der Gewinnungshöhe der jeweils eingesetzten Gewinnungsmaschine Rechnung getragen werden kann. Weiterhin können die entsprechenden Streböffnungsdaten Aufschluss über einen eventuellen Nachfall aus dem Hangenden, das Auftreten von Flözverjüngungen, das "aufKohle-Fahren" der Gewinnungsmaschine beziehungsweise einen eventuellen Liegendeinschnitt der Gewinnungsmaschine geben.
- Nach einem Ausführungsbeispiel der Erfindung ist vorgesehen, dass auch Schildausbaugestelle in einer Bauart mit geteilter Bodenkufe eingesetzt werden, bei denen zwischen den beiden Einzelkufen das Schreitwerk des Schildausbaugestells angeordnet ist, so dass die beiden Einzelkufen des Schildausbaugestells im Unterschied zu miteinander verbundenen Kufen getrennt voneinander eingeraubt werden können, wodurch der sogenannte Elephant-Step als Schreitsteuerung möglich ist. Bei solchen, insbesondere in den für Hobelbetriebe typischen geringeren Flözmächtigkeiten eingesetzten Schildausbaugestellen ist an beiden Einzelkufen je ein Neigungssensor angeordnet.
- Hierzu kann vorgesehen sein, dass für jede der beiden Einzelkufen die jeweilige Schildhöhe aus den gemessenen Neigungswinkeln für die Hangendkappe, den Bruchschild und für die rechte und die linke Einzelkufe des Schildausbaugestells berechnet wird, wobei vorgesehen sein kann, dass die für das Schildausbaugestell ermittelte Schildhöhe aus dem Mittelwert der für die beiden Einzelkufen berechneten Schildhöhenwerte berechnet wird. Für die Erkennung von durch Stempelaufsetzer bedingten Problemen, oder für eine Beurteilung, ob die obere Verstellgrenze bei dem Schildausbaugestell erreicht ist, ist jedoch eine Einzelauswertung der Schildhöhe für die rechte und die linke Schildhälfte auf der Basis der an den Einzelkufen ermittelten Neigungswinkel erforderlich.
- Soweit nach einem Ausführungsbeispiel der Erfindung vorgesehen ist, dass in der Rechnereinheit zusätzlich die bankrechten Höhen innerhalb des Schildausbaugestells im Bereich des Ansatzpunktes der Stempel an der Hangendkappe und im Bereich des Gelenks zwischen Hangendkappe und Schildkappe berechnet werden, ergibt sich daraus der Vorteil, dass über die Höhenlage der Hangendkappe über deren gesamte Erstreckung Hinweise auf das Verhalten des einzelnen Schildausbaugestells während mehrerer aufeinander folgender Schreitzyklen abgeleitet werden können, ob beispielsweise der Schildausbau klettert oder taucht.
- Soweit nach einem Ausführungsbeispiel der Erfindung vorgesehen ist, dass die an den Schildbauteilen angebrachten Neigungssensoren an Stellen mit minimalem Biegewinkel der Bauteile platziert werden, dient dies einer Minimierung von Messfehlen unter Lasteinwirkung.
- Da die Höhenermittelung mit einer größtmöglichen Genauigkeit zu erfolgen hat und Höhenverlustfehler bei Belastung der einzelnen Schildausbaugestelle aufgrund einer Biegebeanspruchung der einzelnen Bauteile der Schildausbaugestelle auftreten können, ist nach einem Ausführungsbeispiel der Erfindung vorgesehen, dass mittels Drucksensoren der Stempelinnendruck der Stempel des Schreitausbaugestells ermittelt wird. Aufgrund eines vorher bei den betreffenden Schildausbaugestellen festgestellten Normverhaltens bei unterschiedlichen Belastungszuständen kann ein die Biegebeanspruchung in praktischem Einsatz der Strebausbaugestelle berücksichtigender Korrekturfaktor in Abhängigkeit von der jeweils im Betrieb aufgenommenen Belastung angesetzt werden, wie dies gemäß einem Ausführungsbeispiel der Erfindung vorgesehen ist.
- Nach einem Ausführungsbeispiel der Erfindung wird über den an der Hangendkappe des Schildausbaugestells angebrachten Neigungssensor die Neigung der Hangendkappe gegen die Horizontale quer zur Schreitrichtung ermittelt. Damit ist es möglich, beim Ablauf der Bewegungen eines Schildausbaugestells festzustellen, ob sich das im Ablauf befindliche Schildausbaugestell noch im Führungsbereich der Spaltabdeckungen zu benachbarten Schildausbaugestellen befindet. Wenn zwei benachbarte Schildausbaugestelle starke Unterschiede in der Höhe oder der Winkelstellung aufweisen, besteht ein verstärktes Risiko, dass bei einem automatischen Vorziehen die Schildausbaugestelle aus dem Verband der gegenseitigen Spaltabdeckungen geraten und dann überfahren werden. So kann dann bei Erkennen einer kritischen Überlappungssituation die Einraubhöhe der Hangendkappe vermindert werden, oder es kann die Hangendkappe in dem Verband mit benachbarten Schildausbaugestellen vor dem Schreitzyklus ausgerichtet werden, oder es kann der Schreitzyklus vor dem erneuten Setzen des betreffenden Schildausbaugestells abgebrochen werden, wenn dieses Schildausbaugestell aus dem Verband geraten ist; dann ist ebenfalls eine Korrektur gegeben.
- Soweit ein in seiner Gewinnungsarbeit maßgenau zu steuernder Walzenschrämlader als Gewinnungsmaschine zum Einsatz kommt, ist nach einem Ausführungsbeispiel der Erfindung vorgesehen, dass bei einer als Walzenschrämlader ausgebildeten Gewinnungsmaschine die Schnitthöhen der den oberen Teilschnitt ausführenden voreilenden Walze und der den unteren Teilschnitt ausführenden Walze aufgrund von die Stellung der Walzentragarme erfassenden Sensoren ermittelt und bei der Vorbeifahrt der Gewinnungsmaschine an jedem Schildausbaugestell die gesamte Walzenschnitthöhe im Verhältnis zu der an dem betreffenden Schildausbaugestell rechnerisch ermittelten Streböffnung gesetzt wird. Damit ist eine Abstimmung der Fahrt der Gewinnungsmaschine durch den Streb auf die Stellung der einzelnen Schildausbaugestelle des eingesetzten Schildausbaus möglich.
- Weiterhin ist nach einem Ausführungsbeispiel der Erfindung vorgesehen, dass die für eine einem Schildausbaugestell zugeordnete Stellung der Gewinnungsmaschine ermittelte Walzenschnitthöhe im Wege einer ortssynchronen Auswertung der mit zeitlicher Ausbauverspätung von der Hangendkappe der zugeordneten Schildausbaugestells nachfolgend für diese Position festgestellten Streböffnung zugeordnet wird. Damit wird dem Umstand Rechnung getragen, dass die von der Gewinnungsmaschine hergestellte Streböffnung von der Spitze der Hangendkappe des zugeordneten Schildausbaugestells erst ein bis zwei Ausbauschritte später erreicht wird, was als Ausbauverspätung bezeichnet wird. Zur vergleichenden Beurteilung der von der Gewinnungsmaschine hergestellten Streböffnung und der vom Schildausbau ausgebauten Streböffnung können nur die Höhendaten an ein und derselben Stelle herangezogen werden. Hierzu werden in der angesprochenen Recheneinheit historische Schnitthöhendaten eingestellt und in den Vergleich mit den Schilddaten an gleicher Raumkoordinate gesetzt, sobald das Schildausbaugestell die entsprechende Raumkoordinate erreicht hat. Diese Vorgehensweise kann auch als ortssynchrone Auswertung bezeichnet werden.
- Das erfindungsgemäße Steuerungsverfahren wird weiterhin dadurch verbessert, dass die Neigung von Förderer und/oder Gewinnungsmaschine gegen die Horizontale in Schreitrichtung der Schildausbaugestelle mittels an Förderer und/oder Gewinnungsmaschine angebrachter Neigungssensoren ermittelt wird. Hierbei reicht die Anordnung eines Neigungssensors an der Gewinnungsmaschine. Obwohl die auf dem Strebförderer fahrende und daran geführte Gewinnungsmaschine gewissermaßen eine Einheit mit dem Strebförderer bildet, kann es zur Verbesserung der Genauigkeit der Steuerung zweckmäßig sein, auch dich Neigung des Strebförderers über einen daran angeordneten Neigungssensor zu erfassen. Gegebenenfalls reicht die Anordnung eines Neigungssensors lediglich an dem Strebförderer für die Zwecke der Steuerung auch aus.
- Im einzelnen kann dabei vorgesehen sein, dass der Neigungswinkel von Förderer und/oder Gewinnungsmaschine in ein Verhältnis zum an der Bodenkufe des Schildausbaugestells und/oder an der Hangendkappe ermittelten Neigungswinkel gesetzt und der daraus gebildete Differenzwinkel in die Berechnung der sich bei mehreren aufeinander folgenden Schreitzyklen des Schildausbaugestells einstellenden Streböffnung einbezogen wird. Hiermit ist der Vorteil verbunden, dass das Durchörtern von Flözmulden oder Flözsätteln besser beherrschbar ist, weil das Verhalten der Strebfront frühzeitig erkennbar wird, so dass durch rechtzeitiges Einsteuern der Gewinnungstätigkeit Einfluss auf Lage und Querschnitt der Streböffnung genommen werden kann.
- Nach einem Ausführungsbeispiel der Erfindung ist vorgesehen, dass die die Geometrie des Schildausbaugestells beschreibenden Höhenwerte an dem vorderen Ende der Hangendkappe, im Bereich des Ansatzpunktes der Stempel an der Hangendkappe und im Bereich des Gelenks zwischen Hangendkappe und Schildkappe über die Zeitachse erfasst und aus Veränderungen der Messwerte über der Zeitachse die durch das auflastende Gebirge bewirkte Konvergenz bestimmt wird. Konvergenz ist dabei die Abnahme der Höhe der betreffenden Streböffnung in Relation zur Ausgangshöhe. Von den eingesetzten Schildausbaugestellen kann die Konvergenz eines einzelnen Gestells von Schritt zu Schritt an jeder Position, an der das Schildausbaugestell gesetzt wurde, bestimmt werden. Hierbei ist neben der absoluten Konvergenz während der Standzeit eines Schildausbaugestells auch der zeitliche Konvergenzverlauf maßgebend. Die Beobachtung des Konvergenzverlaufes ermöglicht eine frühzeitige Erkennung von Auswirkungszonen von tektonischen Unstetigkeiten oder Abbaukanten sowie einer Optimierung von Ausbau- und Gewinnungsarbeit im Hinblick auf die jeweils aktuellen Betriebsbedingungen. Dabei hat es sich herausgestellt, dass die Veränderung der Geometrie der Streböffnung ein wesentlich besseres Bild über die auftretende Konvergenz ergibt als die Beobachtung des Stempelinnendrucks, da die Stempel der einzelnen Schildausbaugestelle beispielsweise durch eingeschaltete Druckbegrenzungsventile gegen zu hohe Drücke geschützt sind und bei Überschreiten voreingestellter Druckhöhen somit eine Konvergenz über die Zeitachse nicht erfassbar ist.
- Es kann vorgesehen sein, dass die Konvergenz in Form von Konvergenzparametern bezogen auf die Streböffnung am vorderen Ende der Hangendkappe, auf die Neigung der Hangendkappe gegen die Horizontale in Schreitrichtung, auf das Einsinken der die Hangendkappe tragenden Stempel und auf das Ende der Hangendkappe dargestellt wird.
- Nach einem Ausführungsbeispiel der Erfindung ist vorgesehen, dass aus den Konvergenzparametern und/oder der Neigung der Hangendkappe in Schreitrichtung die Stellung des Schildausbaugestells im Hinblick auf die Einleitung der Ausbaustützkräfte bestimmt wird, indem aus der Stellung der Hangendkappe zum Verlauf des Hangenden auf die Lage der Bruchkante über der Hangendkappe geschlossen wird. Auf diese Weise können ausbautechnisch ungünstige Stellungen des Schildausbaugestells erkannt und bei nachfolgenden Schreitzyklen entsprechend berücksichtigt und korrigiert werden.
- Nach einem Ausführungsbeispiel der Erfindung ist vorgesehen, dass als Neigungssensoren Beschleunigungssensoren eingesetzt werden, die über die Abweichung von der Erdbeschleunigung die Winkelstellung des Beschleunigungssensors im Raum erfasst. Dabei kann zur Ausschaltung von durch die Schwingungen der eingesetzten Bauteile verursachten Fehlern vorgesehen sein, dass die von den Beschleunigungssensoren ermittelten Messwerte mittels eines geeigneten Dämpfungsverfahren überprüft und korrigiert werden.
- In an sich bekannter Weise kann vorgesehen sein, dass die Stellung der einzelnen Schildausbaugestelle in eine Anzeigeeinheit optisch sichtbar gemacht wird, wobei es zweckmäßig sein kann, wenn als ein Risiko bildend erkannte Abweichungen von vorgegebenen Soll-Werten in der Anzeigeeinheit in einer auffälligen Farbe dargestellt werden.
- In der Zeichnung sind Ausführungsbeispiele der Erfindung wiedergegeben, welche nachstehend beschrieben sind. Es zeigen:
- Fig. 1
- ein Schildausbaugestell mit daran angeordneten Neigungssensoren in Verbindung mit einem Strebförderer und einem als Gewinnungsmaschine eingesetzten Walzenschrämlader in einer schematischen Seitenansicht,
- Fig. 2
- das Schildausbaugestellt gemäß
Figur 1 in einer Einzeldarstellung mit einer Bezeichnung der zugeordneten Höhenmesspunkte, - Fig. 3a - c
- das Schildausbaugestell gemäß
Figur 1 in unterschiedlichen geometrischen Stellungen seiner Bauteile zueinander, - Fig. 4
- die Strebausrüstung gemäß
Figur 1 in einer anderen Betriebssituation, - Fig. 5
- ein Schildausbaugestell gemäß
Figur 1 bei Konvergenzeinwirkung in einer schematischen Darstellung, - Fig. 6
- das Schildausbaugestell gemäß
Figur 4 mit einer guten Bruchkantenlage - Fig. 7
- das Schildausbaugestell gemäß
Figur 4 mit einer schlechten Bruchkantenlage, - Fig. 8a-c
- jeweils ein Schildausbaugestell gemäß
Figur 2 mit unterschiedlicher Ausführung seiner Bodenkufe in einer Vorderansicht. - Die in
Figur 1 dargestellte Strebausrüstung umfasst zunächst ein Schildausbaugestell 10 mit einer Bodenkufe 11, auf der in paralleler Anordnung zwei Stempel 12 angesetzt sind, von denen inFigur 1 nur ein Stempel erkennbar ist und die an ihrem oberen Ende eine Hangendkappe 13 tragen. Während die Hangendkappe 13 an ihrem vorderen (linken) Ende in Richtung der noch zu beschreibenden Gewinnungsmaschine vorsteht, ist an dem hinteren (rechten) Ende der Hangendkappe 13 ein Bruchschild 14 mittels eines Gelenks 15 angelenkt, wobei das Bruchschild von in der Seitenansicht zwei auf der Bodenkufe 11 ruhenden Traglenkern 16 gestützt ist. An dem Schildausbaugestell 10 sind bei dem dargestellten Ausführungsbeispiel drei Neigungssensoren 17 angebracht, und zwar ein Neigungssensor 17 an der Bodenkufe 11, ein Neigungssensor 17 im hinteren Bereich der Hangendkappe 13 in Nähe des Gelenks 15 und ein Neigungssensor 17 an dem Bruchschild 14. Wie nicht weiter dargestellt ist, kann an dem vierten beweglichen Bauteil des Schildausbaugestells 10, den Traglenkern 16, ebenfalls ein Neigungssensor vorgesehen sein, wobei von den vier möglichen Neigungssensoren 17 jeweils drei Neigungssensoren eingebaut sein müssen, um mit den davon ermittelten Neigungswerten die Stellung des Schildausbaugestells in einem Abbauraum zu bestimmen. Weiterhin kann auch der inFigur 1 im hinteren Bereich der Hangendkappe 13 dargestellte Neigungssensor 17 in den vorderen Kappenbereich verlagert werden, sofern in dem Kappenprofil hierfür ein geschützter Raum zur Verfügung steht. Insofern ist die Erfindung nicht auf die konkret inFigur 1 dargestellte Anordnung der Neigungssensoren beschränkt, sondern umfasst alle möglichen Kombinationen von drei Neigungssensoren an den vier beweglichen Bauteilen des Schildausbaugestells. - Wie sich aus
Figuren 8a bis 8c ergibt, kann das inFiguren 1 beziehungsweise 2 in einer Seitenansicht dargestellte Schildausbaugestell 10 dabei grundsätzlich drei Bauformen hinsichtlich seiner Bodenkufe aufweisen. Wie sich zunächst ausFigur 8a ergibt, besteht die Bodenkufe 11 aus zwei Teilkufen, die allerdings über eine feste Stahlkonstruktion 28 fest miteinander verbunden sind, so dass sich eine sogenannte "Tunnelkufe" ergibt. Diese Tunnelkufe weist zwar eine bessere Höhenbeweglichkeit auf, jedoch kommt es zu höheren Flächenpressungen und damit zu einer höheren Tendenz zum Einsinken der beiden Teilkufen in das Liegende. - Alternativ dazu kann gemäß
Figur 8b die Bodenkufe mit zwei Teilkufen ausgebildet sein, die über eine Bodenplatte 29 miteinander verbunden sind, so dass sich eine größere Auflagerfläche für die Bodenkufe ergibt. Damit wird die Flächenpressung und damit die Tendenz vermindert, dass sich die Schildausbaugestelle insbesondere im Bereich der Kufenspitze in das Liegende eindrücken. Diese Bauform schränkt jedoch die Beweglichkeit für schnelle Änderungen der Schildhöhe ein, weil insbesondere bei einer schnellen Vergrößerung der Schildhöhe das Schreitwerk 37 einem schnell abtauchenden Strebförderer nicht folgen kann, weil das Schreitwerk dann am geschlossenen Bodenblech 29 anliegt, was die Möglichkeit der Höhenanpassung begrenzt. - In
Figur 8c schließlich ist eine Ausführungsform dargestellt, die in Hobelbetrieben bei einer geringen Flözmächtigkeit, etwa unterhalb von 1,5m, vorzugsweise zum Einsatz kommt. Bei dieser Ausführung sind getrennte Einzelkufen 35 und 36 vorgesehen, zwischen denen das Schreitwerk 37 derart angeordnet ist, dass die in Schreitrichtung rechte Einzelkufe 35 unhängig von der in Schreitrichtung linken Einzelkufe 36 angehoben werden kann. Diese Trennung der Einzelkufen 35 und 36 ermöglicht das Schreiten des Schildausbaugestells 10 im sogenannten Elephant-Step, mittels dessen einem Einsinken der beiden Einzelkufen 35 und 36 in das Liegende 23 und einem Ansammeln und Aufschieben von Haufwerk vor den Einzelkufen 35, 36 entgegengewirkt werden kann. Derartiges Haufwerk würde ohne entsprechende Gegenmaßnahmen unter bestimmten Betriebsbedingungen nicht schnell genug in Richtung des Bruchfeldes abfließen und dann den Schreitvorgang zunehmend behindern beziehungsweise in einem fortgeschrittenen Stadium sogar verhindern. Bei dem Schreitvorgang wird das Schildausbaugestell 10 durch Anrauben seiner beiden Stempel 12 zunächst entlastet. Im Anschluss daran wird allerdings der mit der einen Einzelkufe verbundene Stempel eingeraubt, so dass sich die betreffende Einzelkufe weiter anhebt und beim Vorziehen des Schildausbaugestells auf auf dem Liegenden liegendes Haufwerk aufgleiten kann. Wenn der Schild gesetzt wird, steht die betreffende Einzelkufe auf dem erhöhten Niveau. Beim nächsten Schreitvorgang wird dann der gleiche Zyklus seitenverkehrt mit der anderen Einzelkufe durchlaufen, so dass die einzelnen Schreitvorgänge in einer Art "Trampelschritt" sich vollziehen. Mit der gleichen Technik ist es auch möglich, eine in das Liegende eingesunkene Einzelkufe wieder auf das Liegendniveau hochzuführen. - Das in
Figur 1 dargestellte Schildausbaugestell 10 ist an einem Strebförderer 20 angeschlagen, der ebenfalls einen Neigungssensor 21 aufweist, so dass im Hinblick auf die Steuerung der Strebausrüstung generell auch hier Daten hinsichtlich der Fördererlage gewonnen werden können. Auf dem Förderer 20 ist eine Gewinnungsmaschine in Form eines Walzenschrämladers 22 mit einer oberen Walze 23 und einer unteren Walze 24 geführt, wobei auch im Bereich des Walzenschrämladers 22 ein Neigungssensor 25 angeordnet ist, ferner ein Sensor 26 zur Erfassung des jeweiligen Standortes des Walzenschrämladers 22 im Streb sowie Reedstäbe 27 zur Messung der Schnitthöhe des Walzenschrämladers 22. Die messtechnische Ausrüstung der Strebausrüstung wird ergänzt durch die Anordnung von Sensoren 18 an den Stempeln 12, mittels derer die Änderung der Höhenlage der Hangendkappe 13 durch Feststellung der Ausfallhöhe des Stempels 12 möglich ist. Ferner ist in die Bodenkufe 11 ein Wegmesssystem 19 integriert, mittels dessen der jeweilige Schreithub des Schildausbaugestells 10 im Verhältnis zum Strebförderer 20 feststellbar ist. Wie schon ausgeführt, ist dabei die Anordnung des Neigungssensors 21 an dem Strebförderer 20 nicht zwingend erforderlich, soweit an dem Walzenschrämlader 22 der Neigungssensor 25 eingerichtet ist. In einem solchen Fall kann der Neigungssensor 21 zur Verbesserung der Messgenauigkeit jedoch zusätzlich vorgesehen sein. - Wie in
Figur 2 angedeutet, lassen sich aufgrund der bekannten Kinematik des Schildausbaugestells 10 je nach der Stellung von Bodenkufe 11, Bruchschild 14 sowie Hangendkappe 13 zueinander die Höhen h1, h2 sowie h3 ermitteln, wobei die Höhe h1 für die Ermittlung der bankrechten Höhe der Streböffnung 30 gilt, während die Höhe h2 ein Maß für eine eventuelle Überhöhe bei einem vollständig ausgefahrenen Schildausbaugestell beziehungsweise für eine Aufsetzergefahr bildet, während die Höhe h3 zur Betrachtung der Konvergenz herangezogen werden kann. Die Ermittlung der Höhen h1, h2 und h3 kann anhand der Messwerte der Neigungssensoren 17 erfolgen, wobei die von diesen Sensoren 17 gemessenen Werte in einer nicht weiter dargestellten Recheneinheit mit den darin abgelegten Basisdaten für die geometrische Ausrichtung der Bauteile und deren Bewegungsverhalten zueinander verglichen werden. Hierzu ist vorgesehen, dass die einzelnen Schildausbaugestelle 10 nach deren Einbau in die Strebausrüstung kalibriert werden, indem die Hangendkappe 13, der Bruchschild 14 und die Bodenkufe 11 mittels Handinklinometer in eingebautem Zustand eingemessen und die Messwerte in die entsprechende Steuerung des Schildausbaugestells 10 eingegeben werden. Soweit in der Schildsteuerung dann die Höhenwerte h1, h2 und h3 angezeigt werden, können diese Höhenwerte mit Maßbändern nachgemessen und anschließend die Neigungssensoren entsprechend kalibriert werden. - Soweit sich auch aufgrund einer Biegebeanspruchung der Bauteile bei auftretender Belastung Änderungen in der Neigung der Bauteile einstellen können, kann vorgesehen sein, entsprechende Winkelfehler beziehungsweise Fehler bei der Ermittlung der Höhenwerte durch Einbringen eines lastabhängigen Fehlerkoeffizienten zu berücksichtigen, indem die im Betrieb auftretende Belastung über Erfassung des Stempelinnendrucks der Stempel 12 des Schreitausbaugestells 10 mittels entsprechend vorgesehener Sensoren erfolgt und aufgrund von Normwerten für das Verhalten der Bauteile des Schildausbaugestells 10 bei entsprechenden Belastungen der jeweilige Korrekturfaktor gebildet wird.
- Wie sich aus den
Figuren 3a, 3b und 3c ergibt, kann über die Erfassung der Änderung des Winkels α die Verstellung des Bruchschildes 14 erfasst werden (Figur 3a ). Über die Erfassung der Winkel β und ε gemäßFigur 3b kann die Winkelveränderung im Bereich der Hangendkappe 13 ermittelt werden, wobei die Winkelveränderungen der vorgenannten Winkel das Verhalten des Schildausbaugestells 10 über mehrere Schreitzyklen im Sinne eines Kletterns oder eines Tauchens anzeigen. Der ausFigur 3c ersichtliche Winkel γ zeigt die Stellung der Bodenkufe 11 auf dem Liegenden. Aus den vorstehenden Anforderungen ergibt sich, dass die eingesetzten Neigungssensoren 17 mindestens einen Messbereich von 120 bis 180 Grad aufweisen sollten, wobei insbesondere Neigungssensoren 17 mit einem Messbereich von 0 bis 360 Grad zweckmäßig sind. - Wie in
Figur 4 nochmals dargestellt ist, ist es zweckmäßig, auch den Förderer 20, an welchem die jeweiligen einzelnen Schildausbaugestelle 10 der Strebausrüstung angeschlagen sind, wie auch die auf dem Förderer 20 geführte Gewinnungsmaschine 22 in Form eines Walzenschrämladers 19 mit einer oberen Walze 23 und einer unteren Walze 24 mit entsprechenden Neigungssensoren auszurüsten, so dass durch die Einbeziehung dieser Neigungswerte die gesamte ermittelte Walzenschnitthöhe des Walzenschrämladers 22 in ein Verhältnis zur von den Schildausbaugestellen 10 zur Verfügung gestellten Streböffnung 30 gesetzt werden kann. Bei dem inFigur 4 dargestellten Ausführungsbeispiel ist erkennbar, dass aufgrund eines Kletterns von Förderer 20 mit Walzenschrämlader 22 sich eine Kollisionsgefahr im Bereich der vorderen Kante der Hangendkappe 13 einstellt. - Wie sich aus
Figur 5 ergibt, können die Höhenwerte h1, h2 und h3 auch Aufschluss über die im untertägigen Betrieb unvermeidlich durch Auflastung des Hangenden 31 auf der Hangendkappe 13 des auf dem Liegenden 32 stehenden Schildausbaugestells 10 entstehende Konvergenz geben, wie diese durch die Belastungspfeile 34 angedeutet ist. Zwischen dem Hangenden 31 und dem Liegenden 32 ist inFigur 5 schematisch noch der Kohlenstoß 33 dargestellt. - Über die Beobachtung der Geometrie des jeweiligen Schildausbaugestells 10 in Verbindung mit der eingetretenen Konvergenz sind Rückschlüsse auf die Lage der Bruchkante möglich, wie sich aus den
Figuren 6 und 7 ergibt. - Bei der aufgrund der Werte der Neigungssensoren 17 ermittelten Stellung des in
Figur 6 dargestellten Schildausbaugestells 10 liegt die Bruchkante 35 im hinteren Bereich der Hangendkappe 13, was bedeutet, dass die Tragfähigkeit des Schildausbaugestells optimal ausgenutzt ist, weil die Einleitung der Ausbaustützkräfte in dem Bereich des Schildausbaugestells erfolgt, in welchem bezüglich der Hangendbeherrschung die bestmögliche Wirkung erzielt werden kann. Eventuelle, sich auf der Oberfläche der Hangendkappe 13 bildende Bergpolster können beim Schreiten des Schildausbaugestells 10 abgestreift werden. Die Bodenkufe steht leicht ansteigend und kann somit gut auf eventuell auf sich auf dem Liegenden 32 bildenden Haufwerk aufgleiten. Das Ergebnis einer derartigen Stellung des Schildausbaugestells 10 besteht darin, dass kaum Nachfall beim Vorrücken des Ausbaus zu erwarten ist, so dass gegebenenfalls auch ein automatischer und störungsarmer Betrieb der Strebausrüstung möglich ist. - Im Gegensatz dazu lassen die Stellungen von Hangendkappe 13 und Bruchschild 14 bei dem in
Figur 7 dargestellten Schildausbaugestell 10 erkennen, dass die Bruchkante 35 bezüglich der Hangendkappe 13 zu weit vorne, etwa im Bereich der Anlenkung der Stempel 12, gelegen ist. Hierdurch drückt sich das bruchseitige Ende der Hangendkappe 13 mangels eines Widerlagers im Hangenden 31 nach oben, so dass die vordere Spitze der Hangendkappe 13 nach unten gerichtet ist. Soweit eine solche Stellung der Handendkappe 13 über die von den Neigungssensoren 17 gelieferten Daten erkannt wird, kann entsprechend gegengesteuert werden, so dass die mit einer solchen Schildsteuerung verbundenen Nachteile vermieden sind. - Wie nicht weiter dargestellt, ist es mit den an einzelnen Schildausbaugestellen 10 wie auch an Förderer 20 und Gewinnungsmaschine 22 gewonnenen Neigungs-Messdaten auch möglich, das Verhalten der Strebausrüstung insgesamt über die Gesamtlänge des Strebes zu erfassen. Treten etwa in einzelnen Bereichen des Strebes beispielsweise aufgrund von geologischen Anomalien wie Sattel- oder Muldenbereichen Abweichungen in der Gewinnungs- und Ausbauarbeit zu anderen Bereichen des Strebes auf, so werden die entsprechenden Problemzonen in der Überwachung sofort sichtbar, so dass in diesen Bereichen die Gewinnungs- und Ausbauarbeit in gezielter Weise entsprechend angepasst werden kann.
- Die in der vorstehenden Beschreibung, den Patentansprüchen, der Zusammenfassung und der Zeichnung offenbarten Merkmale des Gegenstandes dieser Unterlagen können einzeln als auch in beliebigen Kombinationen untereinander für die Verwirklichung der Erfindung in ihren verschiedenen Ausführungsformen wesentlich sein.
Claims (20)
- Verfahren zum Steuern von einen Strebförderer (20), wenigstens eine Gewinnungsmaschine (22) sowie einen hydraulischen Schildausbau aufweisenden Strebbetrieben im untertägigen Steinkohlenbergbau, bei welchem mittels an wenigstens drei der vier Hauptbauteile jedes Schildausbaugestells (10) wie Bodenkufe (11), Bruchschild (14), Traglenkern (16) und bruchseitigem Bereich der Hangendkappe (13) angebrachter Neigungssensoren (17) die Neigung der Schildbauteile gegen die Horizontale in Schreitrichtung ermittelt und aus den gemessenen Daten in einer Rechnereinheit durch Vergleich mit den darin abgelegten, die geometrische Ausrichtung der Bauteile und deren Bewegung während des Schreitens definierenden Basisdaten die jeweilige bankrechte Höhe (h1) des Schildausbaugestells (10) an dem vorderen Ende der Hangendkappe (13) als Maß für die Streböffnung (30) berechnet wird.
- Verfahren nach Anspruch 1, bei welchem ein Schildausbaugestell (10) mit geteilter Bodenkufe eingesetzt wird, wobei zwischen den beiden Einzelkufen (35, 36) des Schildausbaugestells (10) das Schreitwerk (37) des Schildausbaugestells angeordnet und an beiden Einzelkufen (35, 36) je ein Neigungssensor (17) angeordnet ist.
- Verfahren nach Anspruch 2, bei welchem für jede der beiden Einzelkufen (35, 36) die jeweilige Schildhöhe aus den gemessenen Neigungswinkeln für die Hangendkappe (13), den Bruchschild (14) und für die rechte (35) und die linke (36) Einzelkufe des Schildausbaugestells (10) berechnet wird.
- Verfahren nach Anspruch 3, bei welchem die für das Schildausbaugestell (10) ermittelte Schildhöhe aus dem Mittelwert der für die beiden Einzelkufen (35, 36) berechneten Schildhöhenwerte berechnet wird.
- Verfahren einem der Ansprüche 1 bis 4, bei welchem in der Rechnereinheit zusätzlich die bankrechten Höhen (h2, h3) innerhalb des Schildausbaugestells (10) im Bereich des Ansatzpunktes der Stempel (12) an der Hangendkappe (13) und im Bereich des Gelenks (15) zwischen Hangendkappe (13) und Schildkappe (14) berechnet werden.
- Verfahren nach einem der Ansprüche 1 bis 4, bei welchem die an den Schildbauteilen (11, 13, 14) angebrachten Neigungssensoren (17) an Stellen mit minimalem Biegewinkel der Bauteile platziert werden.
- Verfahren nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, dass mittels Drucksensoren der Stempelinnendruck der Stempel (12) des Schildausbaugestells (10) ermittelt wird.
- Verfahren nach einem der Ansprüche 1 bis 7, bei welchem in Abhängigkeit von der durch den Stempelinnendruck repräsentierten Lastaufnahme des Schildausbaugestells (10) eine der ermittelten Last entsprechende Durchbiegung der Schildbauteile (11, 13, 14) in Form einer lastabhängigen Fehlerkompensation in die Berechnung der Höhenmaße (h1, h2, h3) einbezogen wird.
- Verfahren nach einem der Ansprüche 1 bis 8, bei welchem über den an der Hangendkappe (13) des Schildausbaugestells (10) angebrachten Neigungssensor (17) die Neigung der Hangendkappe (13) gegen die Horizontale quer zur Schreitrichtung ermittelt wird.
- Verfahren nach einem der Ansprüche 1 bis 9, bei welchem bei einer als Walzenschrämlader (22) ausgebildeten Gewinnungsmaschine die Schnitthöhen der den oberen Teilschnitt ausführenden voreilenden Walze (23) und der den unteren Teilschnitt ausführenden Walze (24) aufgrund von die Stellung der Walzentragarme erfassenden Sensoren ermittelt und bei der Vorbeifahrt der Gewinnungsmaschine (22) an jedem Schildausbaugestell (10) die gesamte Walzenschnitthöhe in ein Verhältnis zu der an dem betreffenden Schildausbaugestell (10) rechnerisch ermittelten Streböffnung (30) gesetzt wird.
- Verfahren nach einem der Ansprüche 1 bis 10, bei welchem die für eine einem Schildausbaugestell (10) zugeordnete Stellung der Gewinnungsmaschine (22) ermittelte Walzenschnitthöhe im Wege einer ortssynchronen Auswertung der mit zeitlicher Ausbauverspätung von der Hangendkappe (13) der zugeordneten Schildausbaugestells (10) nachfolgend für diese Position festgestellten Streböffnung (30) zugeordnet wird.
- Verfahren nach einem der Ansprüche 1 bis 11, bei welchem die Neigung von Förderer (20) und/oder Gewinnungsmaschine (22) gegen die Horizontale in Schreitrichtung der Schildausbaugestelle (10) mittels an Förderer (20) und/oder Gewinnungsmaschine (22) angebrachter Neigungssensoren (21, 25) ermittelt wird.
- Verfahren nach Anspruch 12, bei welchem der Neigungswinkel von Förderer (20) und/oder Gewinnungsmaschine (22) in ein Verhältnis zum an der Bodenkufe (11) des Schildausbaugestells (10) und/oder an der Hangendkappe (13) ermittelten Neigungswinkel gesetzt und der daraus gebildete Differenzwinkel in die Berechnung der sich bei mehreren aufeinander folgenden Schreitzyklen des Schildausbaugestells (10) einstellenden Streböffnung (30) einbezogen wird.
- Verfahren nach einem der Ansprüche 1 bis 13, bei welchem die die Geometrie des Schildausbaugestells (10) beschreibenden Höhenwerte (h1, h2, h3) an dem vorderen Ende der Hangendkappe (13), im Bereich des Ansatzpunktes der Stempel (12) an der Hangendkappe (13) und im Bereich des Gelenks (15) zwischen Hangendkappe (13) und Schildkappe (14) über die Zeitachse erfasst und aus Veränderungen der Messwerte über der Zeitachse die durch das auflastende Gebirge bewirkte Konvergenz bestimmt wird.
- Verfahren nach Anspruch 14, bei welchem die Konvergenz in Form von Konvergenzparametern bezogen auf die Streböffnung (30) am vorderen Ende der Hangendkappe (13), auf die Neigung der Hangendkappe (13) gegen die Horizontale in Schreitrichtung, auf das Einsinken der die Hangendkappe (13) tragenden Stempel (12) und auf das bruchseitige Ende der Hangendkappe (13) dargestellt wird.
- Verfahren nach Anspruch 14 oder 15, bei welchem aus den Konvergenzparametern und/oder der Neigung der Hangendkappe (13) in Schreitrichtung die Stellung des Schildausbaugestells (10) im Hinblick auf die Einleitung der Ausbaustützkräfte bestimmt wird.
- Verfahren nach einem der Ansprüche 1 bis 6, bei welchem als Neigungssensoren (17) Beschleunigungssensoren eingesetzt werden, die über die Abweichung von der Erdbeschleunigung die Winkelstellung des Beschleunigungssensors im Raum erfassen.
- Verfahren nach Anspruch 17, bei welchem zur Ausschaltung von durch die Schwingungen der eingesetzten Bauteile verursachten Fehlern die von den Beschleunigungssensoren ermittelten Messwerte mittels eines geeigneten Dämpfungsverfahrens überprüft und korrigiert werden.
- Verfahren nach einem der Ansprüche 1 bis 18, bei welchem die Stellung der einzelnen Schildausbaugestelle (10) in eine Anzeigeeinheit optisch sichtbar gemacht wird.
- Verfahren nach Anspruch 19, bei welchem als ein Risiko bildend erkannte Abweichungen von vorgegebenen Soll-Werten in der Anzeigeeinheit in einer auffälligen Farbe dargestellt werden.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL08715851T PL2247823T3 (pl) | 2008-02-19 | 2008-02-19 | Sposób sterowania wybieraniem ścianowym |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/EP2008/001262 WO2009103303A1 (de) | 2008-02-19 | 2008-02-19 | Verfahren zum steuern von strebbetrieben |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2247823A1 EP2247823A1 (de) | 2010-11-10 |
| EP2247823B1 true EP2247823B1 (de) | 2014-06-25 |
Family
ID=40039720
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08715851.5A Not-in-force EP2247823B1 (de) | 2008-02-19 | 2008-02-19 | Verfahren zum steuern von strebbetrieben |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8672414B2 (de) |
| EP (1) | EP2247823B1 (de) |
| CN (1) | CN101970795B (de) |
| AU (1) | AU2008351272B2 (de) |
| EA (1) | EA016460B1 (de) |
| PL (1) | PL2247823T3 (de) |
| WO (1) | WO2009103303A1 (de) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2008351278B2 (en) * | 2008-02-19 | 2011-05-19 | Rag Aktiengesellschaft | Method for automatically creating a defined face opening in plow operations in coal mining |
| WO2012031610A1 (de) | 2010-09-07 | 2012-03-15 | Rag Aktiengesellschaft | Steuerung der gewinnungsarbeit im untertägigen steinkohlenbergbau mittels einer lasermessvorrichtung |
| CN102022131A (zh) * | 2010-09-29 | 2011-04-20 | 北京诚田恒业煤矿设备有限公司 | 一种滑柱式自移液压支架 |
| UA105600C2 (uk) | 2010-12-30 | 2014-05-26 | Раг Акцієнгезелльшафт | Забійне обладнання з прокладеним на ньому шланговим нівелером для визначення висотної позначки окремих елементів забійного обладнання |
| CN102392664B (zh) * | 2011-07-26 | 2014-04-16 | 北京天地玛珂电液控制系统有限公司 | 一种带倾角传感器的液压支架及其高度测量方法 |
| CN102353962B (zh) * | 2011-08-25 | 2013-05-01 | 北京天地玛珂电液控制系统有限公司 | 一种液压支架的无线测距装置和测距方法以及使用该装置和方法的液压支架 |
| CN102418525B (zh) * | 2011-10-28 | 2014-07-09 | 山西晋城无烟煤矿业集团有限责任公司 | 软煤层长壁大采高综合机械化采煤末采方法 |
| CN102536239B (zh) * | 2012-01-06 | 2014-03-26 | 何满潮 | 一种长壁工作面无煤柱开采方法 |
| UA109515C2 (uk) * | 2012-04-02 | 2015-08-25 | Забійне обладнання з покладеними на його каркасах щитового кріплення шланговими нівелірами | |
| UA109514C2 (uk) * | 2012-04-02 | 2015-08-25 | Забійне обладнання з покладеними між забійним конвеєром і каркасами щитового кріплення шланговими нівелірами | |
| EP2803818B1 (de) * | 2013-05-13 | 2019-02-27 | Caterpillar Global Mining Europe GmbH | Steuerverfahren für strebwalze |
| DE112016000923A5 (de) * | 2015-02-28 | 2017-11-02 | Tiefenbach Control Systems Gmbh | Verfahren zum betrieb der abbaumaschine zum kohleabbau im untertägigen streb eines steinkohlebergwerks |
| CN105041359A (zh) * | 2015-05-29 | 2015-11-11 | 苏州贝多环保技术有限公司 | 一种综采工作面液压支架的安装方法 |
| US10208592B2 (en) * | 2015-12-02 | 2019-02-19 | Joy Global Underground Mining Llc | Longwall optimization control |
| CN106948850B (zh) * | 2017-04-28 | 2018-10-09 | 重庆工程职业技术学院 | 液压支架近似直线轨迹四杆机构 |
| GB2576172A (en) | 2018-08-07 | 2020-02-12 | Caterpillar Global Mining Gmbh | Shearing system for longwall mining |
| GB2576171A (en) * | 2018-08-07 | 2020-02-12 | Caterpillar Global Mining Gmbh | Self-advancing roof support for a longwall mining system |
| CN110906903A (zh) * | 2019-12-13 | 2020-03-24 | 山东科技大学 | 一种快速获得综采工作面顶板下沉量的方法 |
| CN115013023B (zh) * | 2022-07-20 | 2025-05-13 | 山东科技大学 | 一种具有煤壁片帮快速响应功能的液压支架 |
| CN115597537B (zh) * | 2022-09-29 | 2025-08-12 | 西安煤矿机械有限公司 | 一种采煤机采高监测方法 |
| CN119145895B (zh) * | 2024-11-11 | 2025-03-04 | 浙江中煤液压机械有限公司 | 一种基于可视化和自适应技术的支架移架方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2714506C2 (de) * | 1977-04-01 | 1982-06-16 | Bergwerksverband Gmbh, 4300 Essen | Verfahren und Einrichtung zur Überwachung und Steuerung von Strebausrüstungen |
| DE3100093A1 (de) * | 1981-01-03 | 1982-08-05 | Gewerkschaft Eisenhütte Westfalia, 4670 Lünen | Vorrichtung zur begrenzung des ausbauwiderstandes eines hydraulischen ausbauschildes |
| DE2917609C2 (de) * | 1979-05-02 | 1985-12-19 | Gewerkschaft Eisenhütte Westfalia, 4670 Lünen | Einrichtung zur Steuerung der Vorpfändkappen eines Schreitausbaus in Abhängigkeit vom Abbaufortschritt |
| DE3605236A1 (de) * | 1986-02-19 | 1987-08-20 | Gewerk Eisenhuette Westfalia | Steuereinrichtung fuer untertaegige ausbaueinheiten |
| PL149218B1 (en) * | 1986-04-03 | 1990-01-31 | Method of filling mined-out longwall workings and filling stopping therefor | |
| DE3620880C1 (en) * | 1986-06-21 | 1987-06-04 | Hemscheidt Maschf Hermann | Hydraulic self-advancing support frame |
| DE3743758A1 (de) * | 1987-12-23 | 1989-07-13 | Bochumer Eisen Heintzmann | Verfahren zur lenkung der abbaufront |
| GB9122146D0 (en) * | 1991-10-18 | 1991-11-27 | Gullick Dobson Ltd | Mine roof supports |
| DE19528378C1 (de) * | 1995-08-02 | 1996-11-28 | Dbt Gmbh | Hydraulisches Schildausbaugestell |
| DE19636389B4 (de) * | 1996-09-07 | 2004-03-11 | Dbt Automation Gmbh | Verfahren und Einrichtung zur Lastüberwachung von hydraulischen Schildausbaugestellen für den Untertagebergbau |
| CN100519988C (zh) * | 2000-04-26 | 2009-07-29 | 联邦科学和工业研究组织 | 采掘机及采掘方法 |
| CN1354318A (zh) * | 2000-11-17 | 2002-06-19 | 连云港市白集煤矿 | 急倾斜松软厚煤层走向长壁倾斜分层采煤技术 |
| CN100567703C (zh) * | 2005-05-19 | 2009-12-09 | 兖矿集团有限公司 | 长壁采煤法综采工艺 |
| DE102007035848C5 (de) * | 2007-07-31 | 2018-11-15 | Marco Systemanalyse Und Entwicklung Gmbh | Ausbauschild und Verfahren zur Steuerung oder Positionsbestimmung eines Ausbauschildes |
| US8244509B2 (en) * | 2007-08-01 | 2012-08-14 | Schlumberger Technology Corporation | Method for managing production from a hydrocarbon producing reservoir in real-time |
-
2008
- 2008-02-19 PL PL08715851T patent/PL2247823T3/pl unknown
- 2008-02-19 EA EA201001132A patent/EA016460B1/ru not_active IP Right Cessation
- 2008-02-19 AU AU2008351272A patent/AU2008351272B2/en active Active
- 2008-02-19 WO PCT/EP2008/001262 patent/WO2009103303A1/de not_active Ceased
- 2008-02-19 CN CN2008801271319A patent/CN101970795B/zh active Active
- 2008-02-19 EP EP08715851.5A patent/EP2247823B1/de not_active Not-in-force
- 2008-02-19 US US12/918,473 patent/US8672414B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| AU2008351272A1 (en) | 2009-08-27 |
| CN101970795A (zh) | 2011-02-09 |
| AU2008351272B2 (en) | 2013-01-10 |
| US20110049964A1 (en) | 2011-03-03 |
| CN101970795B (zh) | 2013-06-12 |
| US8672414B2 (en) | 2014-03-18 |
| PL2247823T3 (pl) | 2015-01-30 |
| EP2247823A1 (de) | 2010-11-10 |
| EA016460B1 (ru) | 2012-05-30 |
| EA201001132A1 (ru) | 2011-02-28 |
| WO2009103303A1 (de) | 2009-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2247823B1 (de) | Verfahren zum steuern von strebbetrieben | |
| EP2247825B1 (de) | Verfahren zur automatischen herstellung einer definierten streböffnung in hobelbetrieben des steinkohlenbergbaus | |
| DE102009030130B9 (de) | Verfahren zur automatisierten Herstellung einer definierten Streböffnung durch neigungsgestützte Radarnavigation der Walze bei einem Walzenschrämlader und eine Vorrichtung hierfür | |
| EP2247824B1 (de) | Verfahren zu einer automatischen herstellung einer definierten streböffnung bei strebbetrieben im untertägigen steinkohlenbergbau | |
| EP2467577B1 (de) | Verfahren zur herstellung einer streböffnung unter einsatz von automatisierungssystemen | |
| EP2247826B1 (de) | Verfahren zur gesteuerten einhaltung eines kappe-kohlenstoss-abstandes bei strebbetrieben | |
| WO2009103306A1 (de) | Verfahren zur stabilisierung der schildsäule bei einem im flözeinfallen geführten strebbetrieb | |
| DE2714506C2 (de) | Verfahren und Einrichtung zur Überwachung und Steuerung von Strebausrüstungen | |
| EP2659092B1 (de) | Strebausrüstung mit einer daran verlegten schlauchwaage zur bestimmung der höhenlage von einzelnen elementen der strebausrüstung | |
| EP2366059B1 (de) | Verfahren zur einstellung einer automatischen niveausteuerung des hobels in hobelbetrieben des steinkohlenbergbaus | |
| DE102007035848C5 (de) | Ausbauschild und Verfahren zur Steuerung oder Positionsbestimmung eines Ausbauschildes | |
| EP2242900A1 (de) | Verfahren zum steuern von strebbetrieben mittels grenzschichterkennung | |
| DE102008047582B3 (de) | Strebausrüstung mit einem höhenverstellbar auf dem Strebförderer geführten Walzenschrämlader | |
| DE4328863C2 (de) | Abbaueinrichtung für den Untertagebergbau | |
| WO2012031610A1 (de) | Steuerung der gewinnungsarbeit im untertägigen steinkohlenbergbau mittels einer lasermessvorrichtung | |
| WO2008011647A1 (de) | Abstützvorrichtung für eine vortriebs- oder gewinnungsmaschine | |
| EP2834464B1 (de) | Strebausrüstung mit an deren schildausbaugestellen verlegten schlauchwaagen | |
| DE102008053133A1 (de) | Verfahren zur automatischen Herstellung einer definierten Streböffnung in Hobelbetrieben des Steinkohlenbergbaus | |
| DE1955353B2 (de) | Wandernder Streckenausbau | |
| DE102007012678B3 (de) | Verfahren zum Steuern von Strebbetrieben im untertägigen Steinkohlenbergbau | |
| DE102017110743B4 (de) | Verfahren zum Ausrichten eines Strebausbaus sowie Anordnung zur Bestimmung der Position von Schreitausbauen eines Strebausbaus | |
| DE2558382B2 (de) | Verfahren zur Entspannung des Gebirgsdrucks in Strecken und Streben sehr mächtiger Steinkohlenflöze | |
| DE3339611C1 (de) | Ausbauanordnung zum stoßartigen Gewinnen mit einer Kurzfrontmaschine im Streb | |
| DE10106753A1 (de) | Steuerung des Vorschubs und des Schneidwalzenhöhenniveaus eines Walzenschrämladers in Abhängigkeit von der Belastung des Walzentragarmes | |
| DE2701641B2 (de) | Hilfsausbau für den Übergang Streb-Strecke |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20100722 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: JUNKER, MARTIN Inventor name: MOZAR, ARMIN |
|
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20140122 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 674846 Country of ref document: AT Kind code of ref document: T Effective date: 20140715 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502008011931 Country of ref document: DE Effective date: 20140814 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140925 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140926 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20140625 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141027 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: T3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141025 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502008011931 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: DE Ref document number: 502008011931 Country of ref document: DE Representative=s name: MANITZ FINSTERWALD PATENTANWAELTE PARTMBB, DE Ref legal event code: R082 |
|
| 26N | No opposition filed |
Effective date: 20150326 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150219 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20150219 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150228 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150228 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20151030 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150219 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150219 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150302 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 674846 Country of ref document: AT Kind code of ref document: T Effective date: 20150219 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150219 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502008011931 Country of ref document: DE Representative=s name: MANITZ FINSTERWALD PATENT- UND RECHTSANWALTSPA, DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502008011931 Country of ref document: DE Representative=s name: MANITZ FINSTERWALD PATENT- UND RECHTSANWALTSPA, DE Ref country code: DE Ref legal event code: R082 Ref document number: 502008011931 Country of ref document: DE Representative=s name: MANITZ FINSTERWALD PATENTANWAELTE PARTMBB, DE Ref country code: DE Ref legal event code: R081 Ref document number: 502008011931 Country of ref document: DE Owner name: MARCO SYSTEMANALYSE UND ENTWICKLUNG GMBH, DE Free format text: FORMER OWNER: RAG AKTIENGESELLSCHAFT, 44623 HERNE, DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20080219 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140625 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20170313 Year of fee payment: 10 Ref country code: CZ Payment date: 20170315 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20170313 Year of fee payment: 10 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180219 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180219 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20200429 Year of fee payment: 13 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502008011931 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210901 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180219 |