EP2216005A1 - Rollator oder Rollstuhl für gehbehinderte Personen - Google Patents
Rollator oder Rollstuhl für gehbehinderte Personen Download PDFInfo
- Publication number
- EP2216005A1 EP2216005A1 EP09001584A EP09001584A EP2216005A1 EP 2216005 A1 EP2216005 A1 EP 2216005A1 EP 09001584 A EP09001584 A EP 09001584A EP 09001584 A EP09001584 A EP 09001584A EP 2216005 A1 EP2216005 A1 EP 2216005A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- rollator
- wheels
- rocker
- belt
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000001771 impaired effect Effects 0.000 title description 2
- 230000009194 climbing Effects 0.000 description 8
- 230000033001 locomotion Effects 0.000 description 5
- 241001272996 Polyphylla fullo Species 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
Images
Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/04—Wheeled walking aids for patients or disabled persons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/04—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven
- A61G5/041—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven having a specific drive-type
- A61G5/042—Front wheel drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/06—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps
- A61G5/066—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps with endless belts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H2003/001—Appliances for aiding patients or disabled persons to walk about on steps or stairways
Definitions
- the present invention relates to a rollator or a wheelchair for handicapped persons.
- Rollators and wheelchairs are well known in the art. Such rollators or wheelchairs are considered small cars formed having four wheels, wherein the front wheels, so aligned in the direction of travel wheels are rotatably mounted about a vertical axis. These wheels are used to steer the rollator or wheelchair. Furthermore, the problem is described using the example of the rollator; this applies equally to a wheelchair. At the rear end are two handles on which the person can support one hand and on the other pushes the rollator. The rollator itself can also have a seat and a small take-up for carry-on luggage. In addition, such rollators are often provided with a brake. For transport and storage, such walkers can also be collapsible.
- rollators are already known from the prior art, which should help in overcoming heels and small steps. So is out of the WO 2005/107678 A2 a walker known which has a climbing aid in the front wheels between the front wheels.
- the climbing aid comprises a ledge which has been bent forwards and which is connected to the frame of the rollator by a closed four-bar linkage.
- T2 From the DE 602 11 439 T2 is another climbing aid for rollators known in which between the two front wheels, a device is provided, which pivots when creating an obstacle between the wheels and thereby practically up the rollator. When jacked up, the handbrake should then be tightened in order to lower the front wheels of the rollator on the obstacle. The problem is that in this case the rollator tilts itself backwards, which affects the balance of the handicapped person. It should also be noted that this only obstacles can be overcome, which are actually over the entire width of the rollator before the rollator. Stones and bumps, which are only in the way of the one wheel, can not be overcome hereby. Another embodiment of a climbing aid from this reference is not suitable to facilitate a handicapped person using such a rollator overcoming obstacles. In the embodiment according to FIG. 3 must be overcome to overcome the obstacle not inconsiderable frictional forces, which is not easy for these people. In addition, here too the rollator at the moment of Pivoted upward, which adversely affects the equilibrium of the handicapped person.
- the invention is therefore based on the object to provide a walker or a wheelchair for people with mobility problems, with essentially no additional effort and, in particular for a walker, without the balance of the disabled person on the rollator is significantly impaired, at least low obstacles in the area from 1.5 to 6 cm can be overcome.
- the two wheels are connected to each other by a belt or chain drive, preferably a belt drive is used.
- a belt drive is used.
- the belt or chain drive is at least moved by the rear, so the larger wheel of the two wheels.
- the chain or belt drive thus serves as an active climbing aid on the obstacle; any frictional forces do not need to be overcome. Otherwise, the pair of wheels will rise through the belt or chain drive; this ensures the climbing up. That is, by the belt or chain drive, the movement of the front wheel is transmitted to the rear wheel and vice versa, so that the belt or chain drive overcomes the distance between the front and rear wheels without the occurrence of friction forces on ascent. It is essential that no frictional forces arise, which require a greater effort in the rise of both the front smaller wheel and the rear larger wheel.
- the holder has a stop, wherein on the rocker means, for. B. a screw is provided, which cooperates with the stop.
- the distance between the front wheel and the ground is adjustable. This is done with the help of the screw and the stop. Because As a result, the angular position of the rocker and thus the distance to the front wheel can be changed to the ground.
- the wheels have a circumferential groove for the belt or chain drive, wherein the belt advantageously rests in the groove of the wheels so that the belt protrudes beyond the lateral surface of the wheel, which ultimately means that the wheel runs on the belt.
- the wear of the belt is still limited, since belts, for example in the form of V-belts, are extremely stable.
- the rocker is designed as a double rocker with two rocker blades, wherein the wheels are rotatably mounted between the two rocker blades. This results in an increased stability of the device as a whole.
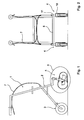
- the generally designated 1 rollator comprises the frame 2, wherein the frame 2 has a rear pair of wheels 3 and two front wheel devices 4, which are connected by a cross member 5.
- the frame 1 also has a braking device 7, which acts on the rear pair of wheels 3.
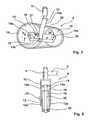
- the invention relates to the wheel device 4, as in FIG. 3 is shown.
- the frame 2 receives the holder 10, wherein the holder 10 is rotatably mounted about a vertical axis 11 on the frame of the rollator.
- the holder 10 includes a double rocker 12, wherein the double rocker 12 composed of two mutually parallel rocker blades 12a, between which the two wheels 15 and 16 are rotatably mounted on the double rocker.
- the double rocker 12 is connected to the U-shaped holder 10 about the swing axis 12b.
- the two wheels 15, 16 have on their outer circumferential periphery a groove 19, 20, in which the belt 25 is guided.
- the belt drive is advantageous about the peripheral surface of the wheel, so that the belt drive has always ground contact both in the front and in the rear wheel 15, 16.
- the front wheel 16 is able to pivot upward in the direction of the arrow 35 due to the pivotable arrangement of the rocker 12 on the holder. That is, overcoming obstacles is possible even if the distance is not set exactly to the height of the expected obstacle. In this case as well, if such a slightly higher obstacle is to be overcome, the occurrence of frictional forces is avoided in any case, since the belt drive 25 always participates in the forward movement.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Handcart (AREA)
Abstract
Gegenstand der Erfindung ist ein Rollator oder Rollstuhl für gehbehinderte Personen, wobei der Rollator (1) vorne um eine vertikale Achse mindestens einen drehbaren Halter (10) aufweist, wobei der Halter (10) eine Schwinge (12) aufnimmt, wobei die Schwinge (12) zwei drehbare Räder (15, 16) unterschiedlichen Durchmessers aufweist, wobei die beiden Räder (15, 16) der Schwinge (12) durch einen Riemen- oder Kettentrieb (25) verbunden sind, wobei das kleinere Rad (16) der beiden Räder (15, 16) einen Abstand zum Boden aufweist.
Description
- Die vorliegende Erfindung betrifft einen Rollator oder einen Rollstuhl für gehbehinderte Personen.
- Rollatoren und Rollstühle sind aus dem Stand der Technik hinreichend bekannt. Derartige Rollatoren oder Rollstühle sind als kleine Wagen ausgebildet, die vier Räder aufweisen, wobei die vorderen Räder, also die in Fahrtrichtung ausgerichteten Räder, um eine Hochachse drehbar gelagert sind. Durch diese Räder erfolgt die Lenkung des Rollators oder Rollstuhls. Im Weiteren wird die Problematik am Beispiel des Rollators beschrieben; dies gilt in gleicher Weise auch für einen Rollstuhl. Am hinteren Ende befinden sich zwei Griffe, auf denen sich die Person zum einen abstützen kann und zum anderen den Rollator schiebt. Der Rollator selbst kann darüber hinaus einen Sitz und eine kleine Aufnahme für Handgepäck aufweisen. Darüber hinaus sind derartige Rollatoren häufig mit einer Bremse versehen. Zum Transport und zur Lagerung können solche Rollatoren auch zusammenklappbar sein.
- Personen, die auf Rollatoren zur Fortbewegung angewiesen sind, sind nur sehr eingeschränkt in der Lage, selbstständig das Gleichgewicht zu halten. Insofern stützen sich die Personen bei der Bewegung des Rollators auf dem Rollator ab. Hierbei wird eine Kraft in Richtung auf den Gehweg ausgeübt, d. h. eine Kraft mit einer vertikalen Komponente. Die Folge hiervon ist, dass selbst die Überwindung kleiner Absätze von 2 bis 3 cm zu einem schier unüberwindlichen Hindernis für solche Personen wird, da diese - wenn sie den Rollator über einen solchen Absatz bewegen wollen - den Rollator vorne zumindest etwas entlasten müssen. Hierbei können dann häufig genug Probleme mit der Aufrechterhaltung des Gleichgewichts auftreten. Das heißt, es besteht ein Interesse daran, solchen Personen das Überwinden von Absätzen oder kleineren Stufen zu ermöglichen, ohne dass hierzu die Belastung auf den Rollator von den Personen nicht oder zumindest nicht wesentlich verändert werden muss.
- Insofern sind aus dem Stand der Technik auch bereits Rollatoren bekannt, die bei der Überwindung von Absätzen und kleinen Stufen helfen sollen. So ist aus der
WO 2005/107678 A2 ein Rollator bekannt, der im Bereich der vorderen Räder zwischen den Vorderrädern eine Aufstiegshilfe aufweist. Die Aufstiegshilfe umfasst eine nach vorne aufgebogene Leiste, die durch ein geschlossenes Gelenkviereck mit dem Rahmen des Rollators verbunden ist. Bei Auftreffen der gebogenen Leiste auf eine Stufe soll nun durch das Gelenkviereck das vordere Radpaar angehoben werden und durch Schieben der gebogenen Leiste über die Stufenkante bzw. durch ein Verschieben der gebogenen Leiste auch über die Oberseite der Stufe der Rollator mit den Vorderrädern auf die Stufe gelangen. Problematisch hierbei ist, dass die gehbehinderte Person immer noch eine relativ hohe Kraft aufbringen muss, um dafür zu sorgen, dass der Rollator mit dem vorderen Radpaar auf die Stufe gelangt, um dann immer noch die Reibkräfte zu überwinden, die auftreten, wenn die aufgebogene Leiste über die Kante der Stufe schleift. - Aus der
DE 602 11 439 T2 ist eine weitere Aufstiegshilfe für Rollatoren bekannt, bei der zwischen den beiden vorderen Rädern eine Vorrichtung vorgesehen ist, die beim Anlegen an ein Hindernis zwischen die Räder einschwenkt und hierdurch den Rollator quasi aufbockt. Im aufgebockten Zustand soll dann die Handbremse angezogen werden, um dann die vorderen Räder des Rollators auf dem Hindernis absenken zu können. Problematisch ist, dass hierbei der Rollator selbst nach hinten kippt, was das Gleichgewicht der gehbehinderten Person beeinträchtigt. Auch ist zu bemerken, dass hiermit nur Hindernisse überwunden werden können, die sich tatsächlich über die gesamte Breite des Rollators vor dem Rollator befinden. Steine und Unebenheiten, die sich nur im Weg des einen Rades befinden, können hiermit nicht überwunden werden. Auch eine weitere Ausführungsform einer Steighilfe aus dieser Literaturstelle ist nicht geeignet, einer gehbehinderten Person mit Hilfe eines solchen Rollators das Überwinden von Hindernissen zu erleichtern. Bei der Ausführungsform gemäßFigur 3 müssen zum Überwinden des Hindernisses nicht unerhebliche Reibungskräfte überwunden werden, was für diese Menschen nicht einfach ist. Darüber hinaus wird auch hier der Rollator im Moment des Aufsteigens nach hinten geschwenkt, was das Gleichgewicht der gehbehinderten Person negativ beeinträchtigt. - Wie bereits ausgeführt, sind die Probleme bei dem Überwinden eines Hindernisses für Rollstühle im Wesentlichen die gleichen wie für einen Rollator; auch mit Rollstühlen ist die Überwindung von Hindernissen schwierig.
- Der Erfindung liegt daher die Aufgabe zugrunde, einen Rollator oder einen Rollstuhl für gehbehinderte Personen bereitzustellen, mit dem im Wesentlichen ohne zusätzlichen Kraftaufwand und, insbesondere für einen Rollator, ohne dass das Gleichgewicht der gehbehinderten Person am Rollator wesentlich beeinträchtigt wird, zumindest niedrige Hindernisse im Bereich von 1,5 bis 6 cm überwunden werden können.
- Die Aufgabe wird erfindungsgemäß dadurch gelöst, dass der Rollator oder der Rollstuhl vorne, also in Fahrtrichtung gesehen, um eine vertikale Achse schwenkbar mindestens einen drehbaren Halter aufweist, wobei der Halter eine Schwinge aufnimmt, wobei die Schwinge zwei drehbare Räder unterschiedlichen Durchmessers aufweist, wobei die beiden Räder einer Schwinge durch einen Riemen- oder Kettentrieb verbunden sind, wobei das kleinere Rad der beiden Räder einen Abstand zum Boden aufweist. Hierdurch wird Folgendes erreicht:
- Bei Anlaufen des Rollators oder Rollstuhls auf ein Hindernis, das beispielsweise eine Höhe zwischen 1,5 und 6 cm aufweist, läuft zunächst das vordere kleine Rad auf das Hindernis auf, eben weil es sich in einer Höhe von ca. 1,5 cm beabstandet zum Boden befindet. Es hat sich herausgestellt, dass die Steigfähigkeit bei gleichem Abstand des Rades zum Boden noch größer ist, wenn das Hindernis eine gewölbte aufsteigende Kurvenform aufweist.
- Wie bereits erläutert, sind die beiden Räder durch einen Riemen- oder Kettentrieb miteinander verbunden, wobei vorzugsweise ein Riementrieb zum Einsatz gelangt. In dem Moment, wo das kleinere Rad der beiden Räder auf oder über das Hindernis läuft, wird der Riemen- oder Kettentrieb zumindest durch das hintere, also das größere Rad der beiden Räder, weiter bewegt. Der Ketten- oder Riementrieb dient somit als aktive Steighilfe auf das Hindernis; irgendwelche Reibkräfte brauchen nicht überwunden zu werden. Sonst steigt das Räderpaar durch den Riemen-oder Kettentrieb auf; dieser sorgt für das Aufklettern. Das heißt, durch den Riemen- oder Kettentrieb wird die Bewegung des vorderen Rades auf das hintere Rad und umgekehrt übertragen, so dass der Riemen- oder Kettentrieb den Abstand zwischen vorderem und hinterem Rad ohne das Auftreten von Reibkräften bei Aufstieg überwindet. Wesentlich hierbei ist, dass keinerlei Reibkräfte entstehen, die beim Aufstieg sowohl des vorderen kleineren Rades als auch des hinteren größeren Rades eine größere Kraftanstrengung bedingen.
- Erläuternd wird hierbei auf Folgendes hingewiesen:
- Die Steigfähigkeit eines Rades steigt mit der Zunahme des Durchmessers. Allerdings verändert sich der Winkel zwischen der Achse des Rades und dem Scheitelpunkt oder der Kante des Hindernisses nur verhältnismäßig wenig. Durch den Riemen- oder Kettentrieb wird nun eine schiefe Ebene geschaffen, die für Winkelverhältnisse sorgt, die die beschriebene Steigfähigkeit ermöglichen.
- In diesem Zusammenhang ist vorgesehen, dass der Halter einen Anschlag aufweist, wobei an der Schwinge ein Mittel, z. B. eine Schraube, vorgesehen ist, die mit dem Anschlag zusammenwirkt. Wie bereits an anderer Stelle erläutert, ist der Abstand des vorderen Rades zum Boden einstellbar. Dies erfolgt mit Hilfe der Schraube und des Anschlages. Denn hierdurch kann die Winkellage der Schwinge und mithin der Abstand zum vorderen Rades zum Boden verändert werden.
- Nach einem weiteren Merkmal der Erfindung ist vorgesehen, dass die Räder eine umlaufende Nut für den Riemen- oder Kettentrieb aufweisen, wobei der Riemen vorteilhaft in der Nut der Räder so einliegt, dass der Riemen über der Mantelfläche des Rades übersteht, was schlussendlich bedeutet, dass das Rad auf dem Riemen abläuft. Es hat sich allerdings gezeigt, dass sich dennoch der Verschleiß des Riemens in Grenzen hält, da Riemen, beispielsweise in Form von Keilriemen, äußerst stabil sind.
- Nach einem weiteren Merkmal der Erfindung ist die Schwinge als Doppelschwinge mit zwei Schwingenblättern ausgebildet, wobei die Räder zwischen den beiden Schwingenblättern drehbar gelagert sind. Hierdurch ergibt sich eine erhöhte Stabilität der Vorrichtung insgesamt.
- Anhand der Zeichnungen wird die Erfindung anhand eines Rollators nachstehend beispielhaft näher erläutert, ohne dass die Erfindung auf einen Rollator begrenzt ist.
- Figur 1
- zeigt schematisch den Rollator in einer Seitenansicht;
- Figur 2
- zeigt schematisch eine Ansicht von vorne;
- Figur 3
- zeigt die Einzelheit X aus
Figur 1 in vergrößerter Darstellung; - Figur 4
- zeigt die Einzelheit gemäß
Figur 3 in einer Ansicht von vorne. - Der insgesamt mit 1 bezeichnete Rollator umfasst das Gestell 2, wobei das Gestell 2 ein hinteres Räderpaar 3 und zwei vordere Radeinrichtungen 4 aufweist, die durch eine Traverse 5 verbunden sind. Das Gestell 1 besitzt darüber hinaus eine Bremseinrichtung 7, die auf das hintere Räderpaar 3 wirkt.
- Gegenstand der Erfindung ist die Radeinrichtung 4, so wie sie in
Figur 3 dargestellt ist. Das Gestell 2 nimmt den Halter 10 auf, wobei der Halter 10 um eine Hochachse 11 drehbar an dem Gestell des Rollators befestigt ist. Der Halter 10 umfasst eine Doppelschwinge 12, wobei sich die Doppelschwinge 12 aus zwei parallel zueinander verlaufenden Schwingenblättern 12a zusammensetzt, zwischen denen die beiden Räder 15 und 16 drehbar an der Doppelschwinge gelagert sind. Hierbei weist das größere Rad 15 der beiden Räder die Radachse 15a auf, während das vordere kleinere Rad 16 die Radachse 16a besitzt. Die Doppelschwinge 12 ist um die Schwingachse 12b mit dem U-förmig ausgebildeten Halter 10 verbunden. - Die beiden Räder 15, 16 weisen auf ihrem äußeren Mantelumfang eine Nut 19, 20 auf, in der der Riemen 25 geführt ist. Hierbei steht der Riementrieb vorteilhaft etwas über die Umfangsmantelfläche des Rades, so dass der Riementrieb sowohl bei dem vorderen als auch bei dem hinteren Rad 15, 16 immer Bodenkontakt hat.
- Darüber hinaus zeigt der eine Schenkel 10a der U-förmigen Halterung einen Anschlag 27, wobei an dem einen Schwingenblatt eine verstellbare Schraube 30 vorgesehen ist, die mit dem Anschlag 27 derart zusammenwirkt, dass hierdurch die Winkellage der Schwinge einstellbar ist. Das bedeutet, dass hierdurch der Abstand des kleineren vorderen Rades 16 zum Boden veränderbar ist. Dies insofern, als dass durch Betätigung der Schraube das vordere kleinere Rad in Richtung des Doppelpfeils 35 verschwenkt.
- Die Funktionsweise stellt sich kurz wie folgt dar:
- Wird sich mit dem Rollator in einer Wohnung bewegt, so sind die gegebenenfalls zu überwindenden Bodenkanten lediglich 1 bis 2 cm hoch. Durch die Schraube 30 in Verbindung mit dem Anschlag 27 kann das vordere Rad 16 insofern auf den entsprechenden Abstand zum Boden eingestellt werden. Erreicht nunmehr das vordere Rad 16 ein Hindernis, so läuft das kleinere Rad 16 zunächst einmal auf das Hindernis auf. In dem Moment, wo der Riementrieb 25 in den Zwischenbereich zwischen den beiden Rädern 15, 16 gelangt, wird hierbei der Riementrieb über den Absatz bewegt, ohne dass irgendwelche Reibung im Spiel ist. Der Riemen wird in jedem Fall entweder durch das vordere Rad 16 oder durch das hintere Rad 15 angetrieben, selbst wenn sich eines der beiden Räder in der Luft befinden sollte, weshalb der Riementrieb 25 immer an der Vorwärtsbewegung aktiv beteiligt ist. Des Weiteren gilt Folgendes:
- Nach Auflaufen des vorderen kleineren Rades wird dann, wenn die Radeinrichtung mit der Schwingachse 12b in den Bereich der Kante des Hindernisses gelangt, das hintere Rad hochklappen. Dies dann, wenn der Abstand x zwischen der Achse 15a und der Achse 12b kleiner ist als der Abstand y zwischen 15a und 12b, und sofern die Achse 12b einen Abstand h zur Achse 15a aufweist. Die Folge hiervon ist, dass der Kraftaufwand zum Überwinden des Hindernisses wesentlich vermindert ist. Dies stellt eine erhebliche Erleichterung für gehbehinderte Personen bei der Überwindung selbst kleinerer Hindernisse dar.
- Sollte ein Hindernis etwas höher sein als der Abstand, den das vordere Rad zum Boden aufweist, so ist aufgrund der schwenkbaren Anordnung der Schwinge 12 an dem Halter das vordere Rad 16 in der Lage, in Richtung des Pfeiles 35 nach oben zu verschwenken. Das heißt, ein Übersteigen von Hindernissen ist selbst dann möglich, wenn der Abstand nicht genau auf die Höhe des zu erwartenden Hindernisses eingestellt ist. Auch in diesem Fall gilt, dass dann, wenn ein solches etwas höheres Hindernis überwunden werden soll, in jedem Fall das Auftreten von Reibungskräften vermieden wird, da der Riementrieb 25 immer an der Vorwärtsbewegung teilnimmt.
Claims (9)
- Rollator oder Rollstuhl für gehbehinderte Personen,
dadurch gekennzeichnet,
dass der Rollator (1) vorne um eine vertikale Achse mindestens einen drehbaren Halter (10) aufweist, wobei der Halter (10) eine Schwinge (12) aufnimmt, wobei die Schwinge (12) zwei drehbare Räder (15, 16) unterschiedlichen Durchmessers aufweist, wobei die beiden Räder (15, 16) der Schwinge (12) durch einen Riemen-oder Kettentrieb (25) verbunden sind, wobei das kleinere Rad (16) der beiden Räder (15, 16) einen Abstand zum Boden aufweist. - Rollator oder Rollstuhl nach Anspruch 1,
dadurch gekennzeichnet,
dass der Abstand einstellbar ist. - Rollator oder Rollstuhl nach einem der voranstehenden Ansprüche,
dadurch gekennzeichnet,
dass die Räder (15, 16) eine umlaufende Nut (19, 20) für den Riemen-oder Kettentrieb (25) aufweisen. - Rollator oder Rollstuhl nach einem der voranstehenden Ansprüche,
dadurch gekennzeichnet,
dass der Riemen- oder Kettentrieb (25) über die Nut (19, 20) übersteht. - Rollator oder Rollstuhl nach einem der voranstehenden Ansprüche,
dadurch gekennzeichnet,
dass die Schwinge (12) als Doppelschwinge mit zwei Schwingenblättern (12a) ausgebildet ist, wobei die Räder (15, 16) zwischen den beiden Schwingenblättern (12a) drehbar gelagert sind. - Rollator oder Rollstuhl nach einem der voranstehenden Ansprüche,
dadurch gekennzeichnet,
dass der Halter (10) U-förmig ausgebildet ist. - Rollator oder Rollstuhl nach einem der voranstehenden Ansprüche,
dadurch gekennzeichnet,
dass der Halter (10) einen Anschlag (27) aufweist, wobei an der Schwinge (12) ein Mittel (30) zum Einstellen, z. B. eine Schraube, vorgesehen ist, die mit dem Anschlag (27) zusammenwirkt. - Rollator oder Rollstuhl nach einem der voranstehenden Ansprüche,
dadurch gekennzeichnet,
dass der Abstand x zwischen der Schwingachse (12b) und der Achse (15a) kleiner ist als der Abstand y zwischen der Achse (16a) und der Schwingachse (12b). - Rollator oder Rollstuhl nach einem der voranstehenden Ansprüche,
dadurch gekennzeichnet,
dass zwischen der Achse (15a) und der Achse (12b) ein Abstand h vorgesehen ist.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09001584A EP2216005A1 (de) | 2009-02-05 | 2009-02-05 | Rollator oder Rollstuhl für gehbehinderte Personen |
| EP09010953A EP2216006B1 (de) | 2009-02-05 | 2009-08-26 | Rollator oder Rollstuhl für gehbehinderte Personen |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09001584A EP2216005A1 (de) | 2009-02-05 | 2009-02-05 | Rollator oder Rollstuhl für gehbehinderte Personen |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP2216005A1 true EP2216005A1 (de) | 2010-08-11 |
Family
ID=40718539
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP09001584A Withdrawn EP2216005A1 (de) | 2009-02-05 | 2009-02-05 | Rollator oder Rollstuhl für gehbehinderte Personen |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP2216005A1 (de) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018086659A1 (de) | 2016-11-13 | 2018-05-17 | Markus Gronen | Ankipphilfe für rollatoren |
| DE102017006071A1 (de) * | 2017-06-28 | 2019-01-03 | Ruprecht Rohde | Multifunktionsfahrzeug |
| CN111449923A (zh) * | 2020-04-13 | 2020-07-28 | 山东建筑大学 | 一种四轮电动助行器 |
| US11097583B2 (en) | 2018-11-30 | 2021-08-24 | Ruprecht Alfred Rohde | Vehicle |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59188421U (ja) * | 1983-06-02 | 1984-12-14 | 三輪精機株式会社 | 車椅子の段差乗越え装置 |
| JPS63127627U (de) * | 1987-02-10 | 1988-08-22 | ||
| NL8900128A (nl) * | 1989-01-19 | 1990-08-16 | Abraham Snoek | Voertuig met een zwenkbare, zelf-verende, voorover hellende rupsbandkonstructie. |
| JPH08225001A (ja) * | 1994-12-22 | 1996-09-03 | Hiroshi Kobayashi | クローラキャスター |
| JPH1191304A (ja) * | 1997-09-22 | 1999-04-06 | Shuichiro Shimomura | キャスター |
| JP2003094906A (ja) * | 2001-09-26 | 2003-04-03 | Kuniichi Miyaji | 段差越えキヤスター |
| EP1323401A1 (de) * | 2001-12-28 | 2003-07-02 | Pihsiang Machinery MFG. Co., Ltd. | Kantensteigvorrichtung |
| WO2005107678A2 (en) | 2004-05-12 | 2005-11-17 | Bob, Bewegingstechnologisch Ontwerp Bureau | Kerb climbing device, its use and walking aid provided with a kerb climbing device |
| DE60211493T2 (de) | 2001-03-09 | 2007-05-03 | Margana Ag | Rollbare gehhilfe mit einer vorrichtung zur erleichterung des fahrens |
-
2009
- 2009-02-05 EP EP09001584A patent/EP2216005A1/de not_active Withdrawn
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59188421U (ja) * | 1983-06-02 | 1984-12-14 | 三輪精機株式会社 | 車椅子の段差乗越え装置 |
| JPS63127627U (de) * | 1987-02-10 | 1988-08-22 | ||
| NL8900128A (nl) * | 1989-01-19 | 1990-08-16 | Abraham Snoek | Voertuig met een zwenkbare, zelf-verende, voorover hellende rupsbandkonstructie. |
| JPH08225001A (ja) * | 1994-12-22 | 1996-09-03 | Hiroshi Kobayashi | クローラキャスター |
| JPH1191304A (ja) * | 1997-09-22 | 1999-04-06 | Shuichiro Shimomura | キャスター |
| DE60211493T2 (de) | 2001-03-09 | 2007-05-03 | Margana Ag | Rollbare gehhilfe mit einer vorrichtung zur erleichterung des fahrens |
| JP2003094906A (ja) * | 2001-09-26 | 2003-04-03 | Kuniichi Miyaji | 段差越えキヤスター |
| EP1323401A1 (de) * | 2001-12-28 | 2003-07-02 | Pihsiang Machinery MFG. Co., Ltd. | Kantensteigvorrichtung |
| WO2005107678A2 (en) | 2004-05-12 | 2005-11-17 | Bob, Bewegingstechnologisch Ontwerp Bureau | Kerb climbing device, its use and walking aid provided with a kerb climbing device |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018086659A1 (de) | 2016-11-13 | 2018-05-17 | Markus Gronen | Ankipphilfe für rollatoren |
| DE102017100007A1 (de) | 2016-11-13 | 2018-05-17 | Markus Gronen | Kipphilfe für Rollatoren |
| DE102017006071A1 (de) * | 2017-06-28 | 2019-01-03 | Ruprecht Rohde | Multifunktionsfahrzeug |
| US11097583B2 (en) | 2018-11-30 | 2021-08-24 | Ruprecht Alfred Rohde | Vehicle |
| CN111449923A (zh) * | 2020-04-13 | 2020-07-28 | 山东建筑大学 | 一种四轮电动助行器 |
| CN111449923B (zh) * | 2020-04-13 | 2022-03-04 | 山东建筑大学 | 一种四轮电动助行器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE69533978T2 (de) | Rollstuhl | |
| DE69834427T2 (de) | Rollbrett | |
| DE102015000270A1 (de) | Mobile Geh- und Transporthilfe-Vorrichtung | |
| DE102017114585A1 (de) | Motorisierte Transportkarre | |
| EP1034106B1 (de) | Motorisch betriebene treppensteigvorrichtung | |
| DE3902547C2 (de) | ||
| DE60315951T2 (de) | Radhubmechanismus | |
| EP2216005A1 (de) | Rollator oder Rollstuhl für gehbehinderte Personen | |
| EP2216006B1 (de) | Rollator oder Rollstuhl für gehbehinderte Personen | |
| WO2018086659A1 (de) | Ankipphilfe für rollatoren | |
| WO2010142277A1 (de) | Transportmittel, insbesondere für körperbehinderte menschen | |
| DE69204594T2 (de) | Rollstühle. | |
| EP3100938A1 (de) | Roller | |
| DE60218731T2 (de) | Rollstuhl | |
| DE202015000207U1 (de) | Mobile Geh- und Transporthilfe-Vorrichtung | |
| DE102008019688A1 (de) | Fahrzeug zum Überwinden von Stufen | |
| EP3823576B1 (de) | Mechanischer rollstuhlantrieb und rollstuhl mit einem solchen mechanischen rollstuhlantrieb | |
| WO2005099646A1 (de) | Treppensteiger zum selbststeigen, adaptierbar an handrollstühlen | |
| CH706683A2 (de) | Rollstuhl. | |
| EP1228954B1 (de) | Spielfahrzeug | |
| DE202007010598U1 (de) | Rollende Gehhilfe | |
| DE202010016170U1 (de) | Gehhilfe | |
| DE202017004591U1 (de) | Elektrisch betriebene fahrbare Gehhilfe | |
| DE202016008625U1 (de) | Adaptives Vorsatzrad für Rollstühle | |
| DE102016116371A1 (de) | Selbstbalancierende Transportvorrichtung, insbesondere Rollstuhl mit Dämpfung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA RS |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| 18W | Application withdrawn |
Effective date: 20100922 |