EP1706012B1 - Appareil pour le nettoyage des sols comportant des moyens pour detecter le sol - Google Patents
Appareil pour le nettoyage des sols comportant des moyens pour detecter le sol Download PDFInfo
- Publication number
- EP1706012B1 EP1706012B1 EP04804760A EP04804760A EP1706012B1 EP 1706012 B1 EP1706012 B1 EP 1706012B1 EP 04804760 A EP04804760 A EP 04804760A EP 04804760 A EP04804760 A EP 04804760A EP 1706012 B1 EP1706012 B1 EP 1706012B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- floor
- floor cleaning
- brush
- cleaning appliance
- displacement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004140 cleaning Methods 0.000 title claims description 72
- 238000006073 displacement reaction Methods 0.000 claims description 12
- 238000001514 detection method Methods 0.000 description 14
- 239000002689 soil Substances 0.000 description 9
- 230000007246 mechanism Effects 0.000 description 8
- 230000006399 behavior Effects 0.000 description 4
- 230000004888 barrier function Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000009408 flooring Methods 0.000 description 3
- 238000002604 ultrasonography Methods 0.000 description 3
- 230000001680 brushing effect Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000011514 reflex Effects 0.000 description 2
- FGRBYDKOBBBPOI-UHFFFAOYSA-N 10,10-dioxo-2-[4-(N-phenylanilino)phenyl]thioxanthen-9-one Chemical compound O=C1c2ccccc2S(=O)(=O)c2ccc(cc12)-c1ccc(cc1)N(c1ccccc1)c1ccccc1 FGRBYDKOBBBPOI-UHFFFAOYSA-N 0.000 description 1
- 101100063504 Mus musculus Dlx2 gene Proteins 0.000 description 1
- 206010053648 Vascular occlusion Diseases 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000007799 cork Substances 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 210000000629 knee joint Anatomy 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4072—Arrangement of castors or wheels
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/34—Machines for treating carpets in position by liquid, foam, or vapour, e.g. by steam
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4002—Installations of electric equipment
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4013—Contaminants collecting devices, i.e. hoppers, tanks or the like
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4041—Roll shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4052—Movement of the tools or the like perpendicular to the cleaning surface
- A47L11/4058—Movement of the tools or the like perpendicular to the cleaning surface for adjusting the height of the tool
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/10—Filters; Dust separators; Dust removal; Automatic exchange of filters
- A47L9/14—Bags or the like; Rigid filtering receptacles; Attachment of, or closures for, bags or receptacles
- A47L9/1427—Means for mounting or attaching bags or filtering receptacles in suction cleaners; Adapters
- A47L9/1436—Connecting plates, e.g. collars, end closures
- A47L9/1445—Connecting plates, e.g. collars, end closures with closure means
- A47L9/1454—Self-sealing closures, e.g. valves
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/06—Control of the cleaning action for autonomous devices; Automatic detection of the surface condition before, during or after cleaning
Definitions
- the invention relates to a floor cleaning device according to the features of the preamble of claim 1.
- a soil detection In floor cleaning devices, it is known to use a soil detection, to determine the soil to be cleaned. For example, depending on the determined floor covering different cleaning behavior can be selected.
- a floor detection can be used in a floor cleaning device, which is designed as an attachment for a conventional, hand-held household vacuum cleaner, optionally for switching on / off an electric motor driven brush roller, for raising or lowering of a suction chamber of the attachment limiting curtain means or change in performance of the vacuum cleaner side suction fan become.
- cleaning robots which autonomously clean floor coverings over a large area, such floor detections are used to change the cleaning behavior or to avoid certain areas.
- solutions are known in which, with the aid of ultrasound, which is emitted by a transceiver and reflected by the ground, make a statement about the floor covering.
- the reflection on hard floors is greater than on carpets, which dampen the sound stronger.
- This known solution proves to be problematic in that various determined due to the reflection soils are difficult to classify. So there are hard floors such as cork, which reflect the ultrasound very weak. This can lead to a faulty evaluation by the circuit. Also strongly dampened carpets can prevent a reflection, so that a precise evaluation is not possible.
- Other known solutions provide a reflex light barrier, for detecting height differences on the ground, so that carpet edges can be detected. However, with the help of these reflex light barriers The floors are not distinguished in their property as carpet or hard floor.
- the object of the invention is to provide a floor cleaning device of the type in question, which allows a simple detection of a reliable detection of the floor covering.
- the ground detection by means of detecting a slip is feasible, the slip is determined by a comparison between the distance traveled and revolutions of a driven Verfahrrads and / or a driven brush.
- a reliable detection of the floor covering is achieved, which can be used in particular in cleaning robots but also in attachments for conventional household vacuum cleaner. The soil is detected reliably regardless of a reflection behavior. Since the slippage compared to the floor on carpet is greater than on hard floor, the speed of rotation of the traversing wheels of the floor cleaning device is lower on carpets. This also applies to a proposed electric motor driven brush of the floor cleaning device, whose rotational speed is reduced on carpets compared to hard floors.
- the slip is determined by a comparison between the distance traveled and revolutions of a driven traversing wheel and / or a driven brush.
- the driving resistance be determined based on the current consumption of the drive motor of the traversing wheel and / or the brush.
- the floor cleaning device has a sensor, which sensor is an idler wheel in an exemplary embodiment. If the distance measured via the sensor is set in relation to the elapsed time since the last measurement, it is possible to make a statement about the speed of the floor cleaning device, in particular of the cleaning robot.
- the floor cleaning device has an electronic memory in which comparison values for slip and / or driving resistance of various floor coverings are stored. Thus, target values for a reference floor, for example hard floor, carpet, are deposited.
- the floor cleaning device has a computer unit which compares the measured values with the stored values and from this a signal for the navigation and / or drive power of the brush or traction wheels and / or a signal for adjusting the brushes and / or the driving resistance influencing, device-side elements derived.
- a ground detection according to the invention can be used to maneuver it accordingly to avoid the occurrence of ground coverings.
- the drive power of the brush can be adjusted, so for gentle brushing of the determined floor covering.
- Another flooring-dependent measure consists for example in a raising or lowering of a suction space limiting curtain means, for example in the form of brush strips.
- a floor cleaning device 1 in the form of a cleaning robot with a chassis 2, which the underside, the floor to be cared 10, driven by electric motor Verfahrer 3 and beyond the lower edge of the chassis bottom 4 protruding, also driven by electric motor brush 5 carries.
- the chassis 2 is covered by a device hood 6, wherein the floor cleaning device 1 has a circular plan.
- the Verfahrer 3 are downstream of the brush 5 in the usual direction of travel r of the floor cleaning device 1, wherein further the brush 5 downstream a keying plate-like dirt ramp 7 is provided, via which the brushed dirt is dropped into a container-like receptacle 8.
- a ground detection is provided, which by means of detecting a slip and / or a driving resistance, in particular the Verfahrer 3 but also alternatively or in combination of the brush. 5
- the slip is in this case determined by a comparison between the traveled distance of the floor cleaning appliance 1 and the revolutions of the driven wheel 3 driven via the electric motor 11 and / or the brush 5 driven by the electric motor 12.
- the rotation determination can be preferred take place directly on the traversing wheel 3 or on the brush 5 or alternatively on the traversing wheel 3 and on the brush 5.
- the ground detection can also be carried out by determining the driving resistance, including at a slip-free translation, for example. Via a toothed belt between the drive motor and driven means, the current consumption of the electric motor 11 of the Verfahrrads 3 and / or the current consumption of the motor 12 of Brush 5 is detected.
- the front wheel 9 is arranged to detect the distance traveled and has a sensor 13, the values of which are detected by a processor 14 integrated in the floor cleaning device 1.
- the determined rotational speeds of the traversing wheel 3 and / or the brush 5 as well as alternatively or also collectively the values of the power consumption of the traversing electric motor 11 and / or the brush electric motor 12 are transmitted to the latter.
- an electronic memory 15 is furthermore provided, in which comparison values for slip and / or driving resistance of various floor coverings are stored.
- the processor compares and passes the measured values such as slip and / or travel resistance of the travel wheel 3 or the travel wheel electric motor 11 and / or the brush 5 or the brush electric motor 12 with the values stored in the memory 15 a signal for controlling the floor cleaning device 1 from.
- the distance traveled is taken up by the follower wheel 9, which measured distance in relation to the elapsed time has been set since the last measurement. From this, a clear statement about the speed of the floor cleaning device 1 can be achieved. Since the running resistance and the slippage relative to the floor 10 on carpet is greater than on hard floor, the speed of the floor cleaning appliance 1 is lower on carpet. In addition, due to the greater resistance, the current of the electric motor 11 of the traversing wheel 3 increases. This also applies to the brush 5 of the floor cleaning device 1, the mechanical resistance increases to carpets, which has an increase in power consumption. Likewise, the rotational speed of the brush 5 also decreases.
- the values detected by the processor 14 are compared with the stored reference values for a reference bottom.
- the signal derived therefrom can serve, for example, for the navigation of the floor cleaning appliance 1, in particular for floor cleaning appliances 1, in particular cleaning robots, which should not drive on certain floor coverings.
- the drive power of the brush 5 and the Verfahrmann 3 can be adjusted according to the determined flooring.
- a signal for adjusting the brushes 5, in particular the board position of the brush 5 can be derived via the chassis bottom 4, so that, for example, for more gentle brushing of carpets, the brush 5 is raised via a known rocker arrangement.
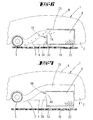
- the in the 4 and 5 in one embodiment schematically illustrated receptacle 8 is in function of an operating state of the Bo dencuris sers 1 closed. It is thus provided that the receptacle 8 is closed when the floor cleaning appliance 1 is raised from the floor 10 to be maintained and / or when the floor cleaning appliance 1 is switched off, in particular switching off the electric motors 11 and / or 12 of the traveling wheels 3 and / or the brush 5 so that already in the recording 8 Collected dust or dirt can not escape from this uncontrolled.
- the receptacle 8 can have an activatable closure means 16 in the form of a closure flap 17, which in any case closes an entry opening 18 of the receptacle 8 due to the operating state.
- closure flap 17 is articulated on the upper side of an entry opening 18.
- the free end of the closure flap 17 is connected via a side of the receptacle 8 extending lever 19 with an axis of a Verfahrrades 3, which is part of an extendable chassis 20, in connection.
- the chassis 2 of the floor cleaning appliance 1 which is not shown here, is supported on the chassis 19, for example in the region of an axis 21, by means of a shell-like support surface 20, for example.
- the latter is loaded by a tension spring 22 in the direction of the support shell 20.
- the already mentioned dirt ramp 7 is articulated in the lower edge of the entry port 18, d. H. articulated in the region opposite the articulation region of the closure flap 17.
- FIG. 5 A like in Fig. 5 schematically illustrated lifting the floor cleaning device 1 leads to a rebound of the chassis 19, via which latter and via the lever 23, the displacement of the shutter 17 is effected in the entry opening-closing position.
- a further alternative embodiment for the automatic closing of the receptacle-entry opening 18 show the 6 and 7 ,
- the receptacle is floating in the floor cleaning device 1 and stored in the chassis 2, so that the floor cleaning device 1 to the receptacle 8 in the vertical direction is relatively movable.
- the chassis 2 In the usual operating position (shown Fig. 6 ), the chassis 2 is supported on the receptacle 8, to which further the chassis 2 has a pocket-like cavity 25 for the receptacle 8.
- the receptacle 8 In the process of the floor cleaning device 8, the receptacle 8 is hereby entrained to collect the swept up or sucked up dirt, which receptacle 8 slides on runner-like spacers 33 on the floor 10.
- handling technology advantageous is an embodiment in which the relative vertical displaceability of the floor cleaning device 1 and the chassis 2 relative to the receptacle 8 is stop-limited, so that a further lifting of the in Fig. 7 shown position the entrainment of the receptacle 8 causes.
- the closure of the receiving port 18 may be coupled to the operating state of the brush 5 driven via the electric motor 12 and / or the traction wheels driven by the electric motor 11.
- a mechanical closing of the entry opening 18 can be achieved via a sensor system for detection of the abyss during lifting of the floor cleaning appliance 1.
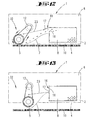
- the 8 and 9 show an embodiment of this.
- the closure means 16 is formed as a hinged in the upper edge region of the entry port 18 closure flap 17.
- this flap 17 is coupled to the engine - in the illustrations of the electric motor 12 for the brush 5 - via a toggle mechanism 27, wherein in the region of the knee joint 28 a chassis negligence fixed tension spring 29 biases the mechanism 27 in a closed position of the flap 17.
- the Fig. 8 shows the operating situation with the electric motor 12 for the brush 5, in which situation by the engine counter torque of the toggle mechanism 27 against the spring force of the tension spring 29 is acted upon so that the shutter 17 is held in the open position via this mechanism.
- the counter-torque decreases, so that the toggle mechanism 27 due to the spring force of the spring 29 back into his Fig. 9 spent in basic position shown what causes about the mechanism pivoting the flap 17 in the entry port closure position.
- a supporting air flow for conveying the dirt in the receptacle 8 serving fan 30 This is driven by an electric motor and is mounted directly in the region of the entry opening 18 such that the fan blades 31 in a standstill position of the fan 30 as shown in FIG Fig. 11 extend blocking in front of the entry port 18, said closure position of the fan 30 is defined by a latching at least one fan blade 31 with an edge portion of the entry port 18
- the fan 30 When switching off the device by the user or even in a detected by abyss 24 lifting the floor cleaning device 1, the fan 30 is electromotively spent in the closed position and turned off after reaching this position, the achievement of the closed position can be monitored for example by a light barrier ,
- a closure flap 17 articulated on the receptacle 8 is coupled via a lever 23 to a cleaning unit 32 arranged floating or pivotable, the latter essentially consisting of the electric motor 12 and the brush 5 driven by it, which are mounted on a common, not shown pivot arm are pivotally mounted about a horizontal axis.
- this cleaning unit 32 is in a known manner dependent on gravity with the brush 5 on the floor 10 to be cleaned.
- Lifting the Bodenthesesgerä tes 1 from the bottom 10 causes a pivoting of the cleaning unit 32 about the pivot axis down, which has the articulated lever 23, the displacement of the flap 17 in the entry port closure position.
- the pivoting of the cleaning unit 32 is stop limited.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Electric Vacuum Cleaner (AREA)
- Electric Suction Cleaners (AREA)
- Nozzles For Electric Vacuum Cleaners (AREA)
- Geophysics And Detection Of Objects (AREA)
- Cleaning Of Streets, Tracks, Or Beaches (AREA)
- Cleaning In General (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Claims (7)
- Appareil de nettoyage des sols (1), en particulier robot de nettoyage, avec un entraînement électromoteur et avec des roues de déplacement (3) et / ou une brosse entraînée (5), dans lequel une reconnaissance de sol est réalisable, caractérisé en ce que la reconnaissance de sol est réalisable au moyen d'un enregistrement du glissement, le glissement étant déterminé par comparaison entre la distance parcourue et des tours d'une roue de déplacement entraînée et/ou de la brosse entraînée.
- Appareil de nettoyage des sols selon la revendication 1, caractérisé en ce que la détection de sol est en outre réalisable au moyen d'un enregistrement de la résistance au roulement.
- Appareil de nettoyage des sols selon la revendication 2, caractérisé en ce que la résistance au roulement est mesurée sur la base du courant absorbé par le moteur d'entraînement (11, 12) de la roue de déplacement (3) et/ou de la brosse (5).
- Appareil de nettoyage des sols selon l'une des revendications précédentes, caractérisé en ce que l'appareil (1) de nettoyage des sols comprend un capteur (13) pour la détection de la distance parcourue.
- Appareil de nettoyage des sols selon la revendication 4, caractérisé en ce que le capteur (13) est une roue à rotation simultanée (9).
- Appareil de nettoyage des sols selon l'une des revendications précédentes, caractérisé en ce que l'appareil de nettoyage des sols (1) comprend une mémoire (15) électronique, dans laquelle sont mémorisées des valeurs de comparaison pour le glissement et/ou la résistance au roulement de différents revêtements de sol.
- Appareil de nettoyage des sols selon la revendication 6, caractérisé en ce que l'appareil de nettoyage des sols comprend un calculateur, qui compare les valeurs mesurées et les valeurs mémorisées et qui en déduit un signal pour la navigation et/ou la puissance absorbée de la brosse (5) ou des roues de déplacement (3) et/ou un signal pour le réglage des brosses (5) et/ou d'éléments influant sur la résistance de roulement, qui sont disposés sur le côté de l'appareil.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08102421A EP1935311A1 (fr) | 2003-12-10 | 2004-12-10 | Appareil de nettoyage de sol |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10357635A DE10357635B4 (de) | 2003-12-10 | 2003-12-10 | Bodenreinigungsgerät |
| PCT/EP2004/053387 WO2005055796A2 (fr) | 2003-12-10 | 2004-12-10 | Appareil de nettoyage pour sols |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08102421A Division EP1935311A1 (fr) | 2003-12-10 | 2004-12-10 | Appareil de nettoyage de sol |
| EP08102421.8 Division-Into | 2008-03-10 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1706012A2 EP1706012A2 (fr) | 2006-10-04 |
| EP1706012B1 true EP1706012B1 (fr) | 2011-03-02 |
Family
ID=34638565
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP04804760A Active EP1706012B1 (fr) | 2003-12-10 | 2004-12-10 | Appareil pour le nettoyage des sols comportant des moyens pour detecter le sol |
| EP08102421A Withdrawn EP1935311A1 (fr) | 2003-12-10 | 2004-12-10 | Appareil de nettoyage de sol |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08102421A Withdrawn EP1935311A1 (fr) | 2003-12-10 | 2004-12-10 | Appareil de nettoyage de sol |
Country Status (7)
| Country | Link |
|---|---|
| EP (2) | EP1706012B1 (fr) |
| JP (1) | JP4680204B2 (fr) |
| CN (1) | CN1889882A (fr) |
| AT (1) | ATE499869T1 (fr) |
| DE (2) | DE10357635B4 (fr) |
| RU (1) | RU2006124526A (fr) |
| WO (1) | WO2005055796A2 (fr) |
Families Citing this family (66)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8788092B2 (en) | 2000-01-24 | 2014-07-22 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8412377B2 (en) | 2000-01-24 | 2013-04-02 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US6956348B2 (en) | 2004-01-28 | 2005-10-18 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US7571511B2 (en) | 2002-01-03 | 2009-08-11 | Irobot Corporation | Autonomous floor-cleaning robot |
| US6690134B1 (en) | 2001-01-24 | 2004-02-10 | Irobot Corporation | Method and system for robot localization and confinement |
| US8396592B2 (en) | 2001-06-12 | 2013-03-12 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US7429843B2 (en) | 2001-06-12 | 2008-09-30 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US9128486B2 (en) | 2002-01-24 | 2015-09-08 | Irobot Corporation | Navigational control system for a robotic device |
| US8428778B2 (en) | 2002-09-13 | 2013-04-23 | Irobot Corporation | Navigational control system for a robotic device |
| US8386081B2 (en) | 2002-09-13 | 2013-02-26 | Irobot Corporation | Navigational control system for a robotic device |
| US7332890B2 (en) | 2004-01-21 | 2008-02-19 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| DE112005000738T5 (de) | 2004-03-29 | 2007-04-26 | Evolution Robotics, Inc., Pasadena | Verfahren und Vorrichtung zur Positionsbestimmung unter Verwendung von reflektierten Lichtquellen |
| ATE536577T1 (de) | 2004-06-24 | 2011-12-15 | Irobot Corp | Fernbediente ablaufsteuerung und verfahren für eine autonome robotervorrichtung |
| US8972052B2 (en) | 2004-07-07 | 2015-03-03 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| US7706917B1 (en) | 2004-07-07 | 2010-04-27 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US7620476B2 (en) | 2005-02-18 | 2009-11-17 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| US8392021B2 (en) | 2005-02-18 | 2013-03-05 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| KR101240732B1 (ko) | 2005-02-18 | 2013-03-07 | 아이로보트 코퍼레이션 | 습식 및 건식 청소를 위한 자동 표면 청소 로봇 |
| US8930023B2 (en) | 2009-11-06 | 2015-01-06 | Irobot Corporation | Localization by learning of wave-signal distributions |
| DE102005046639A1 (de) * | 2005-09-29 | 2007-04-05 | Vorwerk & Co. Interholding Gmbh | Selbständig verfahrbares Bodenstaub-Aufsammelgerät |
| ES2334064T3 (es) | 2005-12-02 | 2010-03-04 | Irobot Corporation | Robot modular. |
| US8374721B2 (en) | 2005-12-02 | 2013-02-12 | Irobot Corporation | Robot system |
| ES2522926T3 (es) | 2005-12-02 | 2014-11-19 | Irobot Corporation | Robot Autónomo de Cubrimiento |
| EP2251757B1 (fr) | 2005-12-02 | 2011-11-23 | iRobot Corporation | Mobilité de robot de couverture |
| WO2007137234A2 (fr) | 2006-05-19 | 2007-11-29 | Irobot Corporation | Dispositif pour débarrasser les robots de nettoyage de débris |
| US8417383B2 (en) | 2006-05-31 | 2013-04-09 | Irobot Corporation | Detecting robot stasis |
| JP5144752B2 (ja) | 2007-05-09 | 2013-02-13 | アイロボット コーポレイション | 自律カバレッジロボット |
| CN101554304B (zh) * | 2008-04-11 | 2012-05-02 | 乐金电子(天津)电器有限公司 | 一种主动驱动式真空吸尘器 |
| NL1036587C2 (nl) * | 2009-02-17 | 2010-08-18 | Lely Patent Nv | Inrichting voor het verplaatsen van materiaal liggend op een vloer. |
| EP2260750A3 (fr) * | 2009-06-12 | 2014-04-23 | Samsung Electronics Co., Ltd. | Robot de nettoyage et méthode de contrôle de course |
| DE102009024990B4 (de) | 2009-06-16 | 2022-06-23 | Vorwerk & Co. Interholding Gmbh | Elektrogerät mit einer Halterung für eine Fernbedienung |
| DE102009052629A1 (de) | 2009-11-10 | 2011-05-12 | Vorwerk & Co. Interholding Gmbh | Verfahren zur Steuerung eines Roboters |
| EP3192419B1 (fr) | 2010-02-16 | 2021-04-07 | iRobot Corporation | Brosse d'aspirateur |
| DE102010016208B4 (de) | 2010-03-30 | 2022-09-22 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Auffinden einer Fernbedienung |
| DE202010005573U1 (de) | 2010-06-07 | 2010-08-19 | Vorwerk & Co. Interholding Gmbh | Selbsttätig verfahrbares Gerät |
| EP2721220A1 (fr) * | 2011-06-17 | 2014-04-23 | Alfred Kärcher GmbH & Co. KG | Balayeuse de voirie comprenant un dispositif de réglage de disque de brosse |
| KR101622331B1 (ko) | 2011-06-17 | 2016-05-31 | 알프레드 캐르혀 게엠베하 운트 컴파니. 카게 | 스위핑 차량 |
| DE102012107765B4 (de) * | 2012-08-23 | 2020-02-13 | Miele & Cie. Kg | Robotsauger und Verfahren zum Betrieb eines Robotsaugers |
| DE102012112402A1 (de) * | 2012-12-17 | 2014-06-18 | Vorwerk & Co. Interholding Gmbh | Anordnung zur Überwindung eines Verfahrhindernisses |
| ES2703800T3 (es) * | 2012-12-18 | 2019-03-12 | Kaercher Alfred Se & Co Kg | Cepillo de limpieza para un aparato de limpieza del suelo y aparato de limpieza del suelo con un cepillo de limpieza |
| KR101520043B1 (ko) * | 2013-07-24 | 2015-05-14 | 에브리봇 주식회사 | 물걸레 로봇청소기 및 청소제어방법 |
| DE102014100164A1 (de) * | 2014-01-09 | 2015-07-09 | Miele & Cie. Kg | Verfahren zum Reinigen von verunreinigten Flächen mit einem selbstfahrenden Reinigungsgerät und Reinigungsgerät dafür |
| JP6216296B2 (ja) | 2014-08-18 | 2017-10-18 | 東芝ライフスタイル株式会社 | 電気掃除機 |
| US20200409382A1 (en) * | 2014-11-10 | 2020-12-31 | Carnegie Mellon University | Intelligent cleaning robot |
| US9993129B2 (en) * | 2015-02-13 | 2018-06-12 | Irobot Corporation | Mobile floor-cleaning robot with floor-type detection |
| CN104908841B (zh) * | 2015-06-16 | 2017-10-17 | 浙江中烟工业有限责任公司 | 云计算机房用折叠式多功能巡检平台车 |
| CN106419766B (zh) * | 2015-08-10 | 2020-06-26 | 科沃斯机器人股份有限公司 | 一种自移动清洗机器人 |
| CN107788913A (zh) * | 2016-08-31 | 2018-03-13 | 科沃斯机器人股份有限公司 | 清洁机器人及其控制方法 |
| DE102017101936A1 (de) * | 2017-02-01 | 2018-08-02 | Vorwerk & Co. Interholding Gesellschaft mit beschränkter Haftung | Selbsttätig verfahrbares Bodenbearbeitungsgerät |
| JP7264584B2 (ja) * | 2017-06-08 | 2023-04-25 | 東芝ライフスタイル株式会社 | 自律型電気掃除装置 |
| DE102017119591A1 (de) * | 2017-08-25 | 2019-02-28 | Vorwerk & Co. Interholding Gmbh | Sich selbsttätig fortbewegendes Bodenbearbeitungsgerät mit einem Steighebel |
| CN107981796B (zh) * | 2017-11-20 | 2020-09-18 | 北京小米移动软件有限公司 | 清洁设备及其控制方法、电子设备、计算机可读存储介质 |
| CN107943039A (zh) * | 2017-11-29 | 2018-04-20 | 深圳市沃特沃德股份有限公司 | 扫地机器人清扫方法和扫地机器人 |
| CN108594692A (zh) * | 2017-12-18 | 2018-09-28 | 深圳市奇虎智能科技有限公司 | 一种清洁设备控制方法、装置、计算机设备和存储介质 |
| CN110522353A (zh) * | 2018-05-24 | 2019-12-03 | 科沃斯机器人股份有限公司 | 机器人清扫方法、扫地机器人及存储介质 |
| CN110623601B (zh) * | 2018-06-21 | 2021-06-08 | 科沃斯机器人股份有限公司 | 地面材质识别方法、装置、扫地机器人和存储介质 |
| CN111035329B (zh) * | 2018-10-12 | 2021-08-03 | 漳州灿坤实业有限公司 | 自动清洁装置 |
| CN113613535B (zh) * | 2019-03-11 | 2023-03-03 | 尚科宁家运营有限公司 | 用于机器人清洁器的集尘杯闸门 |
| US11382473B2 (en) | 2019-12-11 | 2022-07-12 | Irobot Corporation | Predictive maintenance of mobile cleaning robot |
| WO2021238154A1 (fr) * | 2020-05-27 | 2021-12-02 | 莱克电气股份有限公司 | Procédé de commande pour dispositif de nettoyage, dispositif de nettoyage et support de stockage |
| DE102020120140A1 (de) * | 2020-07-30 | 2022-02-03 | Miele & Cie. Kg | Selbstfahrendes Bodenreinigungsgerät |
| CN111973076A (zh) * | 2020-08-21 | 2020-11-24 | 苏州三六零机器人科技有限公司 | 房间属性识别方法、装置、扫地机器人和存储介质 |
| EP4355185A1 (fr) * | 2021-06-17 | 2024-04-24 | Alfred Kärcher SE & Co. KG | Dispositif de nettoyage des sols automoteur et autodirecteur |
| DE102021214522A1 (de) | 2021-12-16 | 2023-06-22 | Volkswagen Aktiengesellschaft | Reinigungsroboter |
| DE102022203701A1 (de) | 2022-04-12 | 2023-10-12 | Volkswagen Aktiengesellschaft | Reinigungsroboter zur Reinigung eines Untergrunds |
| DE102022207500B3 (de) | 2022-07-21 | 2023-11-02 | BSH Hausgeräte GmbH | Verfahren zum Betrieb eines mobilen, selbstfahrenden Geräts |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0729964Y2 (ja) * | 1989-11-28 | 1995-07-12 | シャープ株式会社 | 電気掃除機の回転ブラシ装置 |
| DE69116016T2 (de) * | 1990-07-18 | 1996-09-05 | Sanyo Electric Co | Staubsauger mit, nach Bodenart drehzahlregelbarem Gebläsemotor |
| JP2983658B2 (ja) * | 1991-02-14 | 1999-11-29 | 三洋電機株式会社 | 電気掃除機 |
| JP3132673B2 (ja) * | 1991-05-30 | 2001-02-05 | 東芝テック株式会社 | 吸込口体 |
| JPH0678863A (ja) * | 1991-07-15 | 1994-03-22 | Nec Home Electron Ltd | 自走式掃除機 |
| JP3227758B2 (ja) * | 1992-03-05 | 2001-11-12 | 松下電器産業株式会社 | 移動作業ロボット |
| DE4414683A1 (de) * | 1994-04-15 | 1995-10-19 | Vorwerk Co Interholding | Reinigungsgerät |
| EP0771167B1 (fr) * | 1994-07-13 | 1998-10-07 | Moulinex S.A. | Aspirateur de poussieres comportant une unite de commande a logique floue |
| JPH09154788A (ja) * | 1995-12-06 | 1997-06-17 | Tec Corp | 電気掃除機の床面検知装置 |
| US5671499A (en) * | 1996-01-11 | 1997-09-30 | Black & Decker Inc. | Vacuum cleaner with all components in floor traveling head |
| AU1228897A (en) * | 1996-01-25 | 1997-07-31 | Penguin Wax Co., Ltd. | Floor working machine with a working implement mounted on a self-propelled vehicle acting on floor |
| DE19614624A1 (de) * | 1996-04-13 | 1997-10-16 | Wessel Werk Gmbh | Saugkopf für einen Staubsauger |
| DE19617429B4 (de) * | 1996-05-01 | 2006-12-28 | Wessel-Werk Gmbh | Saugkopf eines Staubsaugers mit Sicherheits-Schalteinrichtung |
| WO2000078198A1 (fr) * | 1999-06-19 | 2000-12-28 | Gi Hwan Han | Aspirateur automatique et autonome |
| DE19948909A1 (de) * | 1999-10-11 | 2001-04-12 | Vorwerk Co Interholding | Filterbeutel für einen Staubsauger |
| WO2001037060A1 (fr) * | 1999-11-18 | 2001-05-25 | The Procter & Gamble Company | Robot de nettoyage domestique |
| JP2001224544A (ja) * | 2000-02-16 | 2001-08-21 | Matsushita Electric Ind Co Ltd | 電気掃除機 |
| DE10113105A1 (de) * | 2000-03-17 | 2001-10-04 | Vorwerk Co Interholding | Bodenpflegegerät sowie Verfahren zur Erkennung eines Bodenzustandes bzw. zur Ausrichtung der Verfahrbewegung |
| KR100420171B1 (ko) * | 2001-08-07 | 2004-03-02 | 삼성광주전자 주식회사 | 로봇 청소기와 그 시스템 및 제어방법 |
| ATE309736T1 (de) * | 2001-09-14 | 2005-12-15 | Vorwerk Co Interholding | Selbsttätig verfahrbares bodenstaub- aufsammelgerät, sowie kombination eines derartigen aufsammelgerätes und einer basisstaton |
| JP2003079551A (ja) * | 2001-09-17 | 2003-03-18 | Toshiba Tec Corp | 電気掃除機 |
| GB0126492D0 (en) * | 2001-11-03 | 2002-01-02 | Dyson Ltd | An autonomous machine |
| US7113847B2 (en) * | 2002-05-07 | 2006-09-26 | Royal Appliance Mfg. Co. | Robotic vacuum with removable portable vacuum and semi-automated environment mapping |
-
2003
- 2003-12-10 DE DE10357635A patent/DE10357635B4/de not_active Expired - Fee Related
-
2004
- 2004-12-10 EP EP04804760A patent/EP1706012B1/fr active Active
- 2004-12-10 WO PCT/EP2004/053387 patent/WO2005055796A2/fr active Application Filing
- 2004-12-10 AT AT04804760T patent/ATE499869T1/de active
- 2004-12-10 JP JP2006543550A patent/JP4680204B2/ja not_active Expired - Fee Related
- 2004-12-10 EP EP08102421A patent/EP1935311A1/fr not_active Withdrawn
- 2004-12-10 CN CN200480036904.4A patent/CN1889882A/zh active Pending
- 2004-12-10 DE DE502004012276T patent/DE502004012276D1/de active Active
- 2004-12-10 RU RU2006124526/12A patent/RU2006124526A/ru not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| RU2006124526A (ru) | 2008-01-20 |
| WO2005055796A3 (fr) | 2005-11-10 |
| EP1706012A2 (fr) | 2006-10-04 |
| DE10357635B4 (de) | 2013-10-31 |
| DE10357635A1 (de) | 2005-07-07 |
| JP2007513660A (ja) | 2007-05-31 |
| CN1889882A (zh) | 2007-01-03 |
| JP4680204B2 (ja) | 2011-05-11 |
| EP1935311A1 (fr) | 2008-06-25 |
| DE502004012276D1 (de) | 2011-04-14 |
| ATE499869T1 (de) | 2011-03-15 |
| WO2005055796A2 (fr) | 2005-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1706012B1 (fr) | Appareil pour le nettoyage des sols comportant des moyens pour detecter le sol | |
| EP3351157B1 (fr) | Appareil de nettoyage se déplaçant automatiquement | |
| DE60002209T2 (de) | Robotisches fussbodenreinigungsgerät | |
| EP3454715B1 (fr) | Systeme et procede de nettoyage d'un sol avec un robot de nettoyage | |
| DE102012108008A1 (de) | Selbstfahrendes Sauggerät und Verfahren zum Betreiben eines selbstfahrenden Sauggeräts | |
| DE202020005668U1 (de) | Intelligentes Reinigungssystem, autonomer Roboter und Andockstation | |
| DE4330475A1 (de) | Vorrichtung und Verfahren zur Vermeidung eines Anstoßens oder Herunterfallens eines sich selbsttätig bewegenden Staubsaugers | |
| EP3024370B1 (fr) | Machine de nettoyage des sols et procédé de réglage | |
| EP3409165B1 (fr) | Dispositif de support sur un robot de nettoyage | |
| EP2893860B1 (fr) | Appareil d'entretien du sol doté d'une brosse à rouleaux entraînée | |
| EP3409168B1 (fr) | Module de nettoyage d'angle pour robots de nettoyage modulaires | |
| EP3569124A1 (fr) | Appareil de nettoyage | |
| DE102007061146A1 (de) | Verfahren zur Auswertung eines Partikelsignals und Saugdüse für einen Staubsauger | |
| DE102012104706A1 (de) | Saugdüse mit zwei Saugmündern | |
| DE202017100064U1 (de) | Sich selbsttätig fortbewegendes Reinigungsgerät | |
| EP2849620B1 (fr) | Appareil de nettoyage du sol se déplaçant et se dirigeant de manière autonome ainsi que procédé destiné à commander son déplacement | |
| DE102017208960A1 (de) | Staubsauger mit einem motorisch betriebenen Dichtmittel | |
| EP2939581A1 (fr) | Appareil de nettoyage automobile et procédé de commande d'un appareil de nettoyage automobile | |
| DE102012109627A1 (de) | Bodenreinigungsgerät | |
| EP1215337A2 (fr) | Dispositif d'aspiration et de balayage | |
| EP1072727A2 (fr) | Véhicule et procédé pour nettoyer les surfaces | |
| DE19602723C2 (de) | Vorrichtung zum Betrieb eines Staubsaugers | |
| DE102020209600B4 (de) | Vorrichtung zur Reinigung eines Serviceroboters | |
| EP3622871B1 (fr) | Appareil de nettoyage doté d'une grille de protection mobile | |
| DE102019204625B3 (de) | Reinigungsroboter mit Abstandssensoren |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20060510 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU MC NL PL PT RO SE SI SK TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| 17Q | First examination report despatched |
Effective date: 20071022 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU MC NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REF | Corresponds to: |
Ref document number: 502004012276 Country of ref document: DE Date of ref document: 20110414 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502004012276 Country of ref document: DE Effective date: 20110414 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20110302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110613 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110603 |
|
| LTIE | Lt: invalidation of european patent or patent extension |
Effective date: 20110302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110602 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110704 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110702 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20111205 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502004012276 Country of ref document: DE Effective date: 20111205 |
|
| BERE | Be: lapsed |
Owner name: VORWERK & CO. INTERHOLDING G.M.B.H. Effective date: 20111231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111231 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20111210 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20120831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111210 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111231 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111231 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111231 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 499869 Country of ref document: AT Kind code of ref document: T Effective date: 20111210 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111210 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20111210 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20110302 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20221230 Year of fee payment: 19 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230517 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231214 Year of fee payment: 20 |