EP0391174A1 - Vorrichtung und Verfahren zum Erfassen von physikalischen Kenngrössen eines Aufzuges - Google Patents
Vorrichtung und Verfahren zum Erfassen von physikalischen Kenngrössen eines Aufzuges Download PDFInfo
- Publication number
- EP0391174A1 EP0391174A1 EP90105566A EP90105566A EP0391174A1 EP 0391174 A1 EP0391174 A1 EP 0391174A1 EP 90105566 A EP90105566 A EP 90105566A EP 90105566 A EP90105566 A EP 90105566A EP 0391174 A1 EP0391174 A1 EP 0391174A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- traction sheave
- evaluation unit
- cable
- elevator
- control circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 15
- 238000011156 evaluation Methods 0.000 claims description 31
- 230000004888 barrier function Effects 0.000 claims description 16
- 238000005259 measurement Methods 0.000 claims description 12
- 230000001133 acceleration Effects 0.000 claims description 9
- 238000006073 displacement reaction Methods 0.000 claims description 4
- 238000002955 isolation Methods 0.000 claims description 2
- 238000007781 pre-processing Methods 0.000 claims description 2
- 238000012854 evaluation process Methods 0.000 claims 2
- 230000005236 sound signal Effects 0.000 claims 2
- 230000005540 biological transmission Effects 0.000 claims 1
- 239000002184 metal Substances 0.000 claims 1
- 238000011022 operating instruction Methods 0.000 claims 1
- 238000007493 shaping process Methods 0.000 claims 1
- 238000011144 upstream manufacturing Methods 0.000 claims 1
- 230000008569 process Effects 0.000 abstract description 6
- 239000000725 suspension Substances 0.000 description 18
- 238000012360 testing method Methods 0.000 description 13
- 230000003068 static effect Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 238000010998 test method Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000011161 development Methods 0.000 description 2
- 238000012552 review Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000012549 training Methods 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0037—Performance analysers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
Definitions
- the innovation relates to a device for detecting physical parameters, in particular movement parameters, of a goods and / or passenger elevator, the elevator having at least one cable pull guided over a traction sheave, at one end of which the car and at the other end of which a counterweight hangs , is driven by a drive motor controlled by an electrical control circuit and operates on the drive pulley, and comprises a brake device connected to the drive pulley and controlled by the control circuit.
- the background for this innovation is safety checks on goods and passenger lifts. Such lifts must be subjected to regular checks, e.g. Characteristic values such as travel paths, braking distances, catching paths and the slip resistance (driving ability) of the cable pull driven by the traction sheave must be determined.
- this object is achieved in that an evaluation unit with a timer is provided, and in that a distance sensor connected to the cable pull and / or the traction sheave is provided, which is connected to an input of the evaluation unit, and that the evaluation unit further, with Switching points of the control circuit, at which signals controlling the movement sequence of the elevator are present, have connectable inputs.
- kinematic data of the elevators that is to say travel path and associated time measurement values, can be determined as a function of the signals controlling the movement sequence of the elevator, the required test characteristic values being able to be determined from the kinematic data.
- the new test procedure represents a significant improvement from a safety point of view in that the elevator is not subjected to high loads during the test.
- the evaluation unit can advantageously have a device for determining and recording distance, speed and acceleration values as a function of time or distance.
- the braking and catching curves recorded in this way are combined into one Screen or printer output and overlaid with calculated envelopes (which define permissible upper and lower limits). This makes it easy to determine the effectiveness of the brake and safety gear.
- the determined curves can be saved on a data carrier.
- the evaluation device expediently comprises a computer, preferably a personal computer.
- the device according to the innovation has a force measuring signal transmitter connected to the cable, by means of which the forces transmitted by the cable and determining the sequence of movements of the car can be determined.
- a force measuring signal transmitter connected to the cable, by means of which the forces transmitted by the cable and determining the sequence of movements of the car can be determined.
- An advantageous development of the invention consists in a method for acquiring physical parameters.
- the rope, the car and the counterweight are accelerated or decelerated in a targeted manner during normal elevator operation.
- the movement parameters of the rope and the traction sheave are recorded separately depending on the time.
- the movement parameters of the rope and traction sheave are compared with a predetermined limit movement parameter (for example a limit curve), the drive capacity of the traction sheave being fulfilled in any case when this limit value is exceeded.
- a predetermined limit movement parameter for example a limit curve
- the reference numeral 1 denotes a traction sheave which has two guide grooves for a cable pull 2 formed in the present case by two cables.
- a car 3 is attached to one end of the cable 2.
- a counterweight 4 hangs at the other end of the cable 2.
- the mass of the counterweight 4 usually corresponds to the mass of the car 3 plus half the permissible car load.
- 5 designates a motor-transmission-brake unit for driving the traction sheave 1, this unit having a handwheel 10 for rotating the traction sheave 1.
- the unit 5 contains a brake for the traction sheave 1.
- the unit 5 with the traction sheave 1 is arranged above a ceiling 11 which closes off the elevator shaft.
- the car 3 When driving, the car 3 is moved via the cable 2, which is driven by the motor-transmission-brake unit via the traction sheave 1.
- the cable For the elevator system to work properly, it is necessary that the cable is laid over the traction sheave in a non-slip manner.
- the car can also be moved by the handwheel 10 in the event of an emergency, repairs or checks.
- 6 denotes an evaluation unit, which in the present exemplary embodiment comprises a personal computer 12, an input / output interface 13 and an interface module 14. With the dashed outline 6 'is intended to indicate that the input / output interface 13 and Interface module 14 form a functional unit.
- the personal computer has a screen 36 as a display device and an input keyboard 37. Between the individual components of the evaluation unit, data traffic takes place in both directions in accordance with the arrows that connect the components.
- the evaluation unit 6 is in each case via one of the lines 15 to 17 with a first distance transducer 7, which can be motionally connected with a cable of the cable pull 2, a second distance transducer 18, which can be motionally connected with the traction sheave 1, for example by contact, and connected to a force measuring signal generator 8, the lines being connected to the evaluation unit via inputs provided on the interface module.
- 9 designates lines via which the evaluation unit is connected to the control circuit 46 of the elevator system.
- the lines 9, like the lines 15 to 17, are connected to inputs which are provided on the interface module 14.
- the lines 9 are combined to form a 12-wire shielded cable which has a test plug which can be connected to the control circuit 46 of the elevator system at one end and a circuit board plug with a voltage protection circuit at the other end.
- the interface module 14 comprises four modules. For electrical signals that are transmitted from the control circuit 46 via the lines 9 to the evaluation unit, a control subinterface is provided, which has an optocoupler for each input for electrical isolation of the evaluation unit from the control circuit. has an operational amplifier for signal amplification to be operated with only one operating voltage, provided with a capacitive feedback, and a Schmitt trigger. A largely symmetrical sensor sub-interface is provided for recording and preprocessing signals from the distance sensors and the force measuring signal transmitter. As a third module, the interface module 14 has a divider module for dividing the system clock of the personal computer 12. Finally, the interface module contains an acoustic signal transmitter which has a monoflop with a pulse width of approximately 500 ms and a downstream piezo beeper.
- the input / output interface has a decoder, an input / output and a timer module.
- the timer module contains a universally programmable counter, the clock input of which is connected to the system clock of the personal computer via the divider module of the interface module.
- the distance sensor has a perforated disk 19 with light passage holes 20 arranged concentrically around the pivot point of the perforated disk at equal intervals.
- the perforated disk is concentrically connected to a drive disk 21 provided with a guide slot for a driving cable rope.
- the perforated disk 19 with the drive disk 21 has an axis of rotation 24 which is rotatably mounted in a holder 23.
- At 25 is a first and at 26 is a second Designated light barrier measuring device whose light rays can pass through the perforated disk or can be interrupted by the perforated disk.
- the distance between the two light barriers and the distance between the light passage holes on the perforated disk is selected so that when the perforated disk rotates in one direction for the signals of the two light barrier devices, the pulse diagrams shown in FIG. 5 with temporally offset pulses result.
- the direction of rotation can be determined by evaluating the measurement signals emitted by both light barriers. Such an evaluation circuit is shown in FIG. 6. In addition to path impulses, the number of which is characteristic of the travel path of the car, the circuit also supplies a signal indicating the direction of movement of the car.
- Fig. 12 shows an embodiment of a double-path transducer which combines the two transducers 7 and 18 in one unit.
- the two distance transducers are slidably mounted against each other and can be pressed with the tread 45 both against the traction sheave and with the running groove 22 'against a supporting cable.
- the mode of operation of the individual distance sensors corresponds to the sensor in FIGS. 3 and 4.
- the force transducer has a helical compression spring 28 guided in a guide sleeve 27, which can be compressed by a pull rod 29, which has a disc 30 at one end against which the spring 28 comes into contact and an eyelet 31 at the other end is.
- 32 with a distance transducer is designated by which a displacement of the pull rod 29 against the guide sleeve 27 can be detected and thus a measurement signal for the force acting on the pull rod can be supplied.
- the distance sensor 32 is shown separately in FIG. 8. 3 and 4, it has a perforated disk 19 'and two light barrier measuring devices 25' and 26 '.
- the perforated disc 19 ' is connected via an axis of rotation 24' to a drive wheel 33 which comes against the tie rod 29 and is driven by the tie rod.
- FIG. 9 another embodiment of a force transducer 8 is shown, which differs from the embodiment of FIG. 7 in that a distance transducer for detecting the displacement of the pull rod 29 'against the guide sleeve 27' is provided, one with the Drawbar 29 'connected, movable against the guide sleeve perforated strip 35 with equidistantly arranged in a line light passage holes 20'.
- a first light barrier device 25 ⁇ and a second light barrier device 26 ⁇ are provided to scan the through holes 20 '.
- the connection of the force transducer 8 with the cable 2 and its support on the ceiling 11 is analogous to Fig.7.
- the direction of movement of the drawbar can be determined.
- FIG. 10 shows a further embodiment for a dynamometer 8, which corresponds in terms of arrangement to the embodiment according to FIG. 7 and differs from it in that the force between the point of application 34 and the elongated holes of the belt attachment 37 is not direct acts on the spring, but is deflected via the joint 35 and presses on the support balls 36 on the plate springs 38.
- the plate springs 38 are guided through a sleeve 39 on the outside.
- the transducer holder 40 serves to hold the distance sensor (dial gauge) 50 according to FIG. 11.
- the distance sensor dial gauge
- it has a perforated disk 19 and two light barrier measuring devices 26.
- the perforated disk 19 is driven by the rack 42 via the gear 43.
- a return spring serves to eliminate the play between gear 43 and rack 42.
- this distance transducer can be fixed to the transducer receptacle 40 of the dynamometer FIG. 10 and there it senses the spring travel, translated by the lever ratio joint 35 - support ball 36 - transducer receptacle 40.
- measurements of travel distances, speeds and accelerations of the car as a function of time or of the path can be carried out as a function of the signals of the control circuit of the elevator system that control the movement of the car carried out and recorded.
- These curves can be output on the computer screen or on a printer. By comparing with the target curves, statements can be made about the effectiveness of the brake and safety gear.
- FIG. 13 shows a typical course of a path (s) over time (t) curve (f) as it was recorded during a catching process. As shown in FIG. 13, this curve (f) is output on the screen or on the printer.
- Two consecutive braking distance measurements can be used to calculate the braking distance of the car loaded with nominal load in the direction from. It is also possible to calculate the braking deceleration when the car is loaded with 1.5 times the nominal load. This is possible because these different braking distances (sleer from to sleer up) are caused by known mass differences. All other masses involved (including rotary) are equally involved in both experiments and can therefore be eliminated. Speeds can also be determined, since the respective times are also stored in a table in the computer for the corresponding routes. Two braking attempts with an empty car can therefore be used to calculate the braking distance or braking deceleration for any load. It is therefore possible to make a statement about the brake under load from the empty car.
- the slip resistance (driving ability) of the cable can also be determined. 7 or 9 or 10 with one or more cables 2 of the cable pull with the aid of a suitable cable clamp 49.
- the guide sleeve of the force transducer is fastened to a fixed point via a belt strap 47 and a cross member 48, expediently on the ceiling 11 closing the elevator shaft.
- the tensile force must be increased in the slip test until either a determined limit value is reached and the signal generator emits a warning signal, or the rope or the ropes on the traction sheave begin to slide.
- the onset of slides can visually e.g. B. by shifting applied markings or by evaluating the signals of the first with the cable and the second with the traction sheave connectable distance sensor.
- the driving ability can also be determined in the following manner with the device described:
- the two distance sensors are each motion-connected with the traction sheave and a suspension cable.
- the control line 9 is connected accordingly to the elevator control.
- the elevator is now out decelerated at full speed with maximum braking effect. From the time the delay is divided, the travel sensors record the distances traveled, which are stored in the computer with the associated times in a table. By evaluating these tables, it can then be determined whether or how far the suspension cable has slid over the traction sheave. Furthermore, it can be determined at which delay the static friction has overcome and the slipping has started and at which delay the ropes have stopped again relative to the traction sheave (transition from sliding friction to static friction). Since the delayed masses (ropes, car and counterweight) are known or can be determined, the delays can therefore be extrapolated directly to the corresponding forces. It can also be determined from which load the elevator slips and at which load there is static friction again.
- both position transducers In order to be able to record path differences, both position transducers must either emit the same impulses for the same distances or be synchronized with a correction factor.
- the two odometers are automatically calibrated with each measuring process. This is achieved as follows: At the beginning of the braking process, before the brake is applied, the elevator moves at an almost constant speed. No additional forces act between the suspension cable and traction sheave. Both odometers travel the same route. If the number of pulses of the two travel meters is now put in relation to each other, this quotient is the synchronization factor of the two travel meters. This synchronization is implemented using software, for example.
- the device described is also able to check the control circuit of the elevator by checking the chronological sequence of the control signals. E.g. the time it takes for the control to switch off the drive or to apply a brake after a safety switch has been opened can be determined.
- the evaluation unit has a number of functional devices, some of which are implemented as software solutions.
- a functional device is provided for determining the speed and / or acceleration values.
- the measurement of the speed can be triggered by actuating the keyboard or it is triggered by signals from the control circuit of the elevator. Measurement results can be displayed on the screen of the personal computer and, if necessary, can be output as a complete test report on a printer.
- the acoustic signal transmitter contained in the interface module 14 can be activated.
- the screen can also be used to display instructions for operating the device.
- the sensor interface causes the computer when an external event occurs, e.g. Advance the perforated disc to interrupt its work and update the corresponding internal memory for distance and possibly time.
- an external event e.g. Advance the perforated disc to interrupt its work and update the corresponding internal memory for distance and possibly time.
- timers and acoustic signal generators with the necessary control were accommodated in the sensor interface.
- dispensing with these modules and instead, controlled by software, using the corresponding modules in the computer.
- the device and the method according to the invention enable the travel movement of an elevator to be recorded very precisely with regard to the distance covered and the associated time. Accelerations and decelerations can be recorded in a very fine time grid.
- Accelerations and decelerations can be recorded in a very fine time grid.
- the empty car can be braked during the upward travel, with an operator holding a distance sensor 7 against the running suspension cable before and during the deceleration.
- the fact whether or not the suspension cable slips on the traction sheave can be visually assessed in this case by marking the position of the suspension cable on the traction sheave with a line before the deceleration.
- the empty elevator car is either accelerated or decelerated.
- the brake of the elevator is held in the standby position by a brake magnet that is constantly energized. If the power supply to the brake magnet is interrupted for the test procedure, the brake starts. The intended interruption of the current supply for the magnet can be used as a trigger for starting the measuring process.
- the short period between the interruption of the power supply and the subsequent intervention of the brake can be used to synchronize the distance sensors for the traction sheave and for the rope. During this short period of time there is a constant speed in both parts. During this period, the two distance meters assigned to the support cable and the traction sheave are synchronized by setting the number of counts of the one distance meter in comparison to that of the second knife. The factor determined in this way is used to convert counting pulses from both sensors into sections. Any manufacturing tolerances between the two odometers as well as different wear and tear are automatically eliminated.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Indicating And Signalling Devices For Elevators (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Braking Arrangements (AREA)
- Indication And Recording Devices For Special Purposes And Tariff Metering Devices (AREA)
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
- Recording Measured Values (AREA)
Abstract
Description
- Die Neuerung betrifft eine Vorrichtung zum Erfassen von physikalischen Kenngrößen, insbesondere von Bewegungsparametern, eines Lasten- und/oder Personenaufzugs, wobei der Aufzug wenigstens einen über eine Treibscheibe geführten Seilzug, an dessen einem Ende der Fahrkorb und an dessen anderem Ende ein Gegengewicht hängt, aufweist, von einem durch eine elektrische Steuerschaltung gesteuerten, auf die Treibscheibe arbeitenden Antriebsmotor angetrieben ist, und eine mit der Treibscheibe verbundene und durch die Steuerschaltung gesteuerte Bremsvorrichtung umfaßt.
- Den Hintergrund für die vorliegende Neuerung bilden Sicherheitsprüfungen an Lasten- und Personenaufzügen. Solche Aufzüge müssen regelmäßigen Kontrollen unterworfen werden, wobei z.B. Kennwerte wie Fahrwege, Bremswege, Fangwege und die Rutschfestigkeit (Treibfähigkeit) des von der Treibscheibe angetriebenen Seilzugs zu ermitteln sind.
- Die Überprüfung von Aufzügen erforderte bisher einen hohen Arbeitsaufwand, da die Überprüfung der Wirksamkeit der Bremse und der Fangvorrichtung ein Beladen des Aufzugs mit der zulässigen Nutzlast und bei der Überprüfung der Rutschfestigkeit sogar mit mindestens eineinhalbfacher Nutzlast erforderlich machte. Das Ein- und Ausladen von entsprechenden Gewichten ist nicht nur zeitraubend, sondern auch mit schwerer körperlicher Arbeit verbunden. Es kommt außerdem hinzu, daß die Gewichtsprobe für die Aufzugsanlage eine hohe Beanspruchung der belasteten Bauteile darstellt.
- Es ist die Aufgabe der vorliegenden Neuerung, Mittel zur Überprüfung von Lasten- und/oder Personenaufzügen zur Verfügung zu stellen, durch die der Arbeitsaufwand für das Prüfverfahren bei gleichzeitiger Erhöhung der Prüfqualität erheblich verringert ist.
- Neuerungsgemäß wird diese Aufgabe dadurch gelöst, daß eine Auswerteeinheit mit einem Zeitgeber vorgesehen ist, und daß ein mit dem Seilzug und/oder der Treibscheibe in Verbindung stehender Wegstreckenaufnehmer vorgesehen ist, der an einem Eingang der Auswerteeinheit angeschlossen ist, und daß die Auswerteeinheit weitere, mit Schaltpunkten der Steuerschaltung, an denen den Bewegungsablauf des Aufzugs steuernde Signale anliegen, verbindbare Eingänge aufweist.
- Mit einer derartigen Vorrichtung lassen sich kinematische Daten der Aufzüge, also Fahrweg- und zugehörige Zeitmeßwerte in Abhängigkeit von den den Bewegungsablauf des Aufzugs steuernden Signalen bestimmen, wobei aus den kinematischen Daten die benötigen Prüfkennwerte ermittelbar sind. Das neuerungsgemäße Prüfverfahren stellt in sicherheitstechnischer Hinsicht eine deutliche Verbesserung dar, indem keine hohen Belastungen des Aufzugs bei der Prüfung auftreten.
- Insbesondere kann für die Auswerteeinheit vorteilhaft eine Einrichtung für die Bestimmung und Aufzeichnung von Strecken-, Geschwindigkeits- und Beschleunigungswerten als eine Funktion der Zeit bzw. des Weges erfolgen. Die so aufgenommenen Brems- und Fangkurven werden auf einen Bildschirm bzw. Drucker ausgegeben und mit errechneten Hüllkurven (welche zulässige Ober- und Untergrenzen festlegen) überlagert. Dadurch läßt sich auf einfache Art die Wirksamkeit von Bremse und Fangvorrichtung ermitteln. Die ermittelten Kurven können auf Datenträger gespeichert werden. Zweckmäßigerweise umfaßt die Auswerteeinrichtung einen Computer, vorzugsweise einen Personal-Computer.
- In weiterer zweckmäßiger Ausgestaltung weist die neuerungsgemäße Vorrichtung einen mit dem Seilzug verbundenen Kraftmeßsignalgeber auf, durch den die durch den Seilzug übertragenen, den Bewegungsablauf des Fahrkorbs bestimmenden Kräfte ermittelbar sind. Mit Hilfe einer solchen Kraftmessung läßt sich insbesondere die Prüfung der Rutschfestigkeit des durch die Treibscheibe angetriebenen Seilzugs vorteilhaft durchführen.
- Eine vorteilhafte Weiterbildung der Erfindung besteht in einem Verfahren zum Erfassen von physikalischen Kenngrößen. Für die Überprüfung der Haftfähigkeit des Seiles auf der Treibscheibe wird während des normalen Fahrbetriebes des Aufzuges das Seil, der Fahrkorb sowie das Gegengewicht gezielt beschleunigt oder verzögert. Die Bewegungsparameter des Seiles und der Treibscheibe werden dabei in Abhängigkeit von der Zeit getrennt erfaßt.
- Vorteilhaft ist es, wenn darüberhinaus die Bewegungsparameter von Seil und Treibscheibe mit einem vorgegebenen Grenzbewegungsparameter (z.B. einer Grenzkurve) verglichen werden, wobei beim Überschreiten dieses Grenzwertes die Treibfähigkeit der Treibscheibe auf jeden Fall erfüllt ist. Eine günstige Weiterbildung ist aber auch dann gegeben, wenn bei unterschiedlichen Bewegungsparametern von Seil und Treibscheibe aufgrund des gemessenen Unterschiedes die Treibfähigkeit der Treibscheibe bestimmt wird.
- Weitere zweckmäßige Weiterbildungsmöglichkeiten der Neuerung gehen aus den Unteransprüchen hervor.
- Die Neuerung soll nun anhand von Ausführungsbeispielen und der beiliegenden Zeichnungen weiter erläutert und beschrieben werden. Es zeigen:
- Fig. 1 eine Aufzugsanlage (schematisch), zu deren Überprüfung die neuerungsgemäße Vorrichtung vorgesehen ist,
- Fig. 2 ein Ausführungsbeispiel für eine neuerungsgemäße Vorrichtung in schematischer Darstellung,
- Fig. 3 ein Ausführungsbeispiel für einen in einer neuerungsgemäßen Vorrichtung verwendbaren Wegstreckenaufnehmer in Vorderansicht,
- Fig. 4 den Wegstreckenaufnehmer gemäß der Fig. 3 in Seitenansicht,
- Fig. 5 Zeitdiagramme der von dem Wegstreckenaufnehmer gemäß der Fig. 3 und 4 abgegebenen Meßsignale,
- Fig. 6 eine Auswerteschaltung für die von dem Wegstreckenaufnehmer gemäß der Fig. 3 und 4, 7, 8, 9 bzw. 11 abgegebenen Meßsignale,
- Fig. 7 ein Ausführungsbeispiel für einen in einer neuerungsgemäßen Vorrichtung verwendbaren Kraftmeßsignalgeber,
- Fig. 8 ein bei dem Kraftmeßsignalgeber gemäß der Fig. 7 als Meßwandler verwendeter Wegstreckenaufnehmer,
- Fig. 9 ein weiteres Ausführungsbeispiel für einen in einer neuerungsgemäßen Vorrichtung verwendbaren Kraftmeßsignalgeber.
- Fig.10 ein weiteres Ausführungsbeispiel für eine in einer neuerungsgemäßen Vorrichtung verwendbaren Kraftmesser mit Meßuhr.
- Fig.11 ein bei der Kraftmesser gemäß der Fig. 10 als Meßwandler verwendbaren Wegstreckenaufnehmer, (Meßuhr)
- Fig.12 ein Ausführungsbeispiel für einen in einer neuerungsgemäßen Vorrichtung verwendeten Wegstreckenaufnehmer in der Ausführung als Doppelaufnehmer,
- Fig.13 ein Fangdiagramm mit der tatsächlich aufgezeichneten Funktion f in Abhängigkeit vom Weg (s) über der Zeit (t) und,
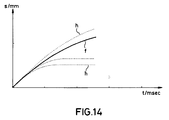
- Fig.14 ein Fangdiagramm mit der Fangkurve f von Fig. 13, sowie mit Hüllkurven h, die als Grenzwerte für die Fangkurve dienen.
- Um die Funktionsweise der neuerungsgemäßen Vorrichtung später besser beschreiben zu können, soll anhand von Fig. 1 zunächst eine Aufzugsanlage beschrieben werden, zu deren Überprüfung die neuerungsgemäße Vorrichtung vorgesehen ist.
- In Fig. 1 ist mit dem Bezugszeichen 1 eine Treibscheibe bezeichnet, die zwei Führungsrillen für einen im vorliegenden Fall durch zwei Seile gebildeten Seilzug 2 aufweist. An einem Ende des Seilzugs 2 ist ein Fahrkorb 3 befestigt. Am anderen Ende des Seilzugs 2 hängt ein Gegengewicht 4. Die Masse des Gegengewichts 4 entspricht üblicherweise der Masse des Fahrkorbes 3 zuzüglich der halben zulässigen Fahrkorbbeladung. Mit 5 ist eine Motor-Getriebe-Bremsen-Einheit für den Antrieb der Treibscheibe 1 bezeichnet, wobei diese Einheit ein Handrad 10 für die Drehung der Treibscheibe 1 aufweist. Die Einheit 5 enthält eine Bremse für die Treibscheibe 1. Die Einheit 5 mit der Treibscheibe 1 ist oberhalb einer den Aufzugsschacht nach oben abschließenden Decke 11 angeordnet.
- Im Fahrbetrieb wird der Fahrkorb 3 über den Seilzug 2, der von der Motor-Getriebe-Bremsen-Einheit über die Treibscheibe 1 angetrieben wird, bewegt. Für einen einwandfreien Betrieb der Aufzugsanlage ist es erforderlich, daß der Seilzug ausreichend rutschfest über die Treibscheibe verlegt ist. Der Fahrkorb kann im Notfall sowie bei Reparaturen oder bei Überprüfungen auch durch das Handrad 10 bewegt werden.
- In der Fig. 2 ist mit 6 eine Auswerteeinheit bezeichnet, die im vorliegenden Ausführungsbeispiel einen Personalcomputer 12, eine Ein-/Ausgabeschnittstelle 13 und einen Schnittstellenbaustein 14 umfaßt. Mit der gestrichelten Umrandungslinie 6′ soll angedeutet werden, daß die Ein-/Ausgabeschnittstelle 13 und der Schnittstellenbaustein 14 eine Funktionseinheit bilden. Der Personalcomputer weist, wie üblich, einen Bildschirm 36 als Anzeigevorrichtung und eine Eingabetastatur 37 auf. Zwischen den einzelnen Bausteinen der Auswerteeinheit erfolgt entsprechend den eingezeichneten, die Bausteine verbindenden Pfeilen ein Datenverkehr in beiden Richtungen. Die Auswerteeinheit 6 ist im vorliegenden Ausführungsbeispiel jeweils über eine der Leitungen 15 bis 17 mit einem ersten Wegstreckenaufnehmer 7, der mit einem Seil des Seilzugs 2 bewegungsverbunden sein kann, einem zweiten Wegstreckenaufnehmer 18, der mit der Treibscheibe 1 z.B. durch Anlage bewegungsverbunden sein kann, und einem Kraftmeßsignalgeber 8 verbunden, wobei die Leitungen über am Schnittstellenbaustein vorgesehene Eingänge an der Auswerteeinheit angeschlossen sind. Mit 9 sind Leitungen bezeichnet, über die die Auswerteeinheit mit der Steuerschaltung 46 der Aufzugsanlage verbunden ist. Die Leitungen 9 sind wie die Leitungen 15 bis 17 an Eingänge angeschlossen, die am Schnittstellenbaustein 14 vorgesehen sind.
- Die Leitungen 9 sind im vorliegenden Ausführungsbeispiel zu einem 12-adrigen abgeschirmten Kabel zusammengefaßt, das an einem Ende einen mit der Steuerschaltung 46 der Aufzugsanlage verbindbaren Prüfstecker und am anderen Ende einen Platinenstecker mit einer Spannungsschutzbeschaltung aufweist.
- Der Schnittstellenbaustein 14 umfaßt vier Baugruppen. Für elektrische Signale, die von der Steuerschaltung 46 über die Leitungen 9 auf die Auswerteeinheit übertragen werden, ist eine Steuerungsteilschnittstelle vorgesehen, die je Eingang einen Optokoppler für eine galvanische Trennung der Auswerteeinheit von der Steuerschaltung, einen mit nur einer Betriebsspannung zu betreibenden, mit einer kapazitiven Rückkopplung versehenen Operationsverstärker für die Signalverstärkung und einen Schmitt-Trigger aufweist. Zur Erfassung und Vorverarbeitung von Signalen der Wegstreckenaufnehmer und des Kraftmeßsignalgebers ist eine weitgehend symmetrisch aufgebaute Sensorteilschnittstelle vorgesehen. Als dritte Baugruppe weist der Schnittstellenbaustein 14 einen Teiler-Baustein zum Teilen des Systemtaktes des Personalcomputers 12 auf. Schließlich enthält der Schnittstellenbaustein einen akustischen Signalgeber, der einen Monoflop mit einer Impulsbreite von ca. 500 ms und einen nachgeschalteten Piezopiepser aufweist.
- Die Ein-/Ausgabeschnittstelle weist einen Decoder-, einen Ein-/Ausgabe- und einen Zeitgeberbaustein auf. Der Zeitgeberbaustein enthält einen universell programmierbaren Zähler, dessen Takteingang über den Teiler-Baustein des Schnittstellenbausteins mit dem Systemtakt des Personalcomputers verbunden ist.
- Die Fig. 3 und 4 zeigen ein Ausführungsbeispiel für einen Wegstreckenaufnehmer in Vorder- bzw. Seitenansicht, wie er bei einer Vorrichtung gemäß der Fig. 2 verwendet werden kann. Der Wegstreckenaufnehmer weist eine Lochscheibe 19 mit konzentrisch um den Drehpunkt der Lochscheibe in gleichen Abständen angeordneten Lichtdurchgangslöchern 20 auf. Die Lochscheibe ist konzentrisch mit einer einen Führungsschlitz für ein antreibendes Seilzugseil versehenen Antriebsscheibe 21 verbunden. Die Lochscheibe 19 mit der Antriebsscheibe 21 weist eine in einer Halterung 23 drehbar gelagerte Drehachse 24 auf. Mit 25 ist eine erste und mit 26 ist eine zweite Lichtschrankenmeßeinrichtung bezeichnet, deren Lichtstrahlen durch die Lochscheibe hindurchtreten bzw. durch die Lochscheibe unterbrochen werden können. Der Abstand zwischen den beiden Lichtschranken und der Abstand zwischen den Lichtdurchgangslöchern auf der Lochscheibe ist so gewählt, daß sich bei Drehung der Lochscheibe in einer Richtung für die Signale der beiden Lichtschrankeneinrichtungen die in der Fig. 5 gezeigten Impulsdiagramme mit zeitlich versetzten Impulsen ergeben. Durch Auswertung der von beiden Lichtschranken abgegebenen Meßsignale kann die Drehrichtung ermittelt werden. Eine solche Auswerteschaltung ist in der Fig. 6 dargestellt. Neben Wegeimpulsen, deren Anzahl für den Fahrweg des Fahrkorbes kennzeichnend ist, liefert die Schaltung auch ein die Bewegungsrichtung des Fahrkorbes anzeigendes Signal.
- Die Fig. 12 zeigt ein Ausführungsbeispiel für einen Doppelwegstreckenaufnehmer der die beiden Aufnehmer 7 und 18 in einer Einheit zusammenfaßt. Die beiden Wegstreckenaufnehmer sind gegeneinander verschiebbar gelagert und lassen sich so mit der Lauffläche 45 sowohl gegen die Treibscheibe als auch mit der Laufrille 22′ gegen ein Tragseil drücken. Die Funktionsweise der einzelnen Wegstreckenaufnehmer entspricht dem Aufnehmer in Fig. 3 und 4.
- In Fig. 7 ist ein Ausführungsbeispiel für einen der Vorrichtung verwendbaren Kraftmeßsignalgeber 8 dargestellt. Der Kraftmeßsignalgeber weist eine in einer Führungshülse 27 geführte Schraubendruckfeder 28 auf, die durch eine Zugstange 29, die an einem Ende eine Scheibe 30, gegen die die Feder 28 zur Anlage kommt, und am anderen Ende eine Öse 31 aufweist, zusammendrückbar ist. Mit 32 ist ein Wegstreckenaufnehmer bezeichnet, durch den eine Verschiebung der Zugstange 29 gegen die Führungshülse 27 erfaßbar und damit ein Meßsignal für die an der Zugstange angreifende Kraft lieferbar ist. Der Wegstreckenaufnehmer 32 ist gesondert in Fig. 8 dargestellt. Er weist wie der Wegstreckenaufnehmer gemäß der Fig. 3 und 4 eine Lochscheibe 19′ und zwei Lichtschrankenmeßeinrichtungen 25′ und 26′ auf. Die Lochscheibe 19′ ist über eine Drehachse 24′ mit einem Antriebsrad 33, das gegen die Zugstange 29 zur Anlage kommt und durch die Zugstange angetrieben ist, verbunden.
- In Fig. 9 ist ein weiteres Ausführungsbeispiel für einen Kraftmeßsignalgeber 8 dargestellt, das sich von dem Ausführungsbeispiel gemäß der Fig. 7 dadurch unterscheidet, daß ein Wegstreckenaufnehmer zum Erfassen der Verschiebung der Zugstange 29′ gegen die Führungshülse 27′ vorgesehen ist, der einen mit der Zugstange 29′ verbundenen, gegen die Führungshülse verschiebbaren Lochstreifen 35 mit äquidistant in einer Linie angeordneten Lichtdurchgangslöchern 20′ aufweist. Zur Abtastung der Durchgangslöcher 20′ sind eine erste Lichtschrankeneinrichtung 25˝ und eine zweite Lichtschrankeneinrichtung 26˝ vorgesehen. Die Verbindung des Kraftmeßsignalgebers 8 mit dem Seil 2 und seine Abstützung an der Decke 11 ist analog zu Fig.7.
- Durch Verwendung von jeweils zwei Lichtschranken bei den Wegstreckenaufnehmern für die Kraftmeßsignalgeber kann eine Ermittlung der Bewegungsrichtung der Zugstange erfolgen.
- In der Fig. 10 ist ein weiteres Ausführungsbeispiel für einen Kraftmesser 8 dargestellt, der von der Anordnung her generell dem Ausführungsbeispiel gemäß Fig. 7 entspricht und sich von diesem dadurch unterscheidet, daß die Kraft zwischen dem Angriffspunkt 34 und den Langlöchern der Gurtbefestigung 37 nicht direkt auf die Feder wirkt, sondern über das Gelenk 35 umgelenkt wird und über die Auflagerkugeln 36 auf die Tellerfedern 38 drückt. Die Tellerfedern 38 sind außen durch eine Hülse 39 geführt. Die Meßgeberaufnahme 40 dient der Aufnahme des Wegstreckenaufnehmers (Meßuhr) 50 gemäß Fig. 11. Er weist wie der Wegstreckenaufnehmer gemäß der Fig. 3 und 4 eine Lochscheibe 19 und zwei Lichtschrankenmeßeinrichtungen 26 auf. Die Lochscheibe 19 wird über das Zahnrad 43 von der Zahnstange 42 angetrieben. Eine Rückstellfeder dient dazu, das Spiel zwischen Zahnrad 43 und Zahnstange 42 zu eliminieren. Am Spannschaft 41 läßt sich dieser Wegstreckenaufnehmer an der Meßwertgeberaufnahme 40 des Kraftmessers Fig. 10 fixieren und tastet dort den Federweg übersetzt durch das Hebelverhältnis Gelenk 35 - Auflagekugel 36 - Meßgeberaufnahme 40 ab.
- Mit der anhand der Fig. 2 sowie der Fig. 3 bis 6 und 12 beschriebenen Vorrichtung können Messungen von Fahrtstrecken, Geschwindigkeiten und Beschleunigungen des Fahrkorbes als Funktion der Zeit bzw. des Weges in Abhängigkeit von den die Bewegung des Fahrkorbes steuernden Signalen der Steuerschaltung der Aufzugsanlage durchgeführt und aufgezeichnet werden. Diese Kurven können auf den Bildschirm des Computers bzw. auf einen Drucker ausgegeben werden. Durch Vergleich mit den Sollkurven lassen sich damit Aussagenüber die Wirksamkeit von Bremse und Fangvorrichtung machen.
- In Fig. 13 ist ein typischer Verlauf einer Weg (s) über Zeit (t) Kurve (f) dargestellt, wie er während eines Fangvorgangs aufgezeichnet wurde. Diese Kurve (f) wird, wie in Fig. 13 dargestellt, auf dem Bildschirm, bzw. auf den Drucker ausgegeben.
- Fig. 14 zeigt ebenfalls ein Fangdiagramm, für die Kurve (f) das jedoch zusätzlich mit den errechneten Grenzkurven h überlagert ist, so daß eine Aussage über die Wirkung der Fangvorrichtung gemacht werden kann. Auch dieses Diagramm ist ein Originaldiagramm, wie es auf dem Bildschirm dargestellt wird.
- Durch zwei nacheinander durchgeführte Bremswegmessungen (einmal leer auf und einmal leer ab) läßt sich auf den Bremsweg des mit Nennlast beladenem Fahrkorbes in Richtung ab hochrechnen. Es ist außerdem die Bremsverzögerung bei mit 1.5-facher Nennlast beladenen Fahrkorb in Richtung ab berechenbar. Dies ist dadurch möglich, weil diese unterschiedlichen Bremswege (Sleer ab zu Sleer auf) durch bekannte Massendifferenzen verursacht werden. Alle anderen beteiligten Massen (einschließlich rotatorischer) sind bei beiden Versuchen gleichartig beteiligt und lassen sich folglich eliminieren. Geschwindigkeiten können ebenfalls ermittelt werden, da auch hierbei in einer Tabelle im Rechner zu den entsprechenden Wegen die jeweiligen Zeiten mit abgespeichert werden. Durch zwei Bremsversuche mit leerem Fahrkorb läßt sich also der Bremsweg bzw. die Bremsverzögerung bei beliebiger Last errechnen. Es besteht somit die Möglichkeit, vom leeren Fahrkorb eine Aussage über die Bremse unter Last zu machen. Außerdem kann man, wie beschrieben, die Verzögerung unter Last errechnen. Diese Verzögerung wiederum bestimmt den dynamischen Anteil bei der Treibfähigkeitsprüfung mit Last. Da diese Verzögerung berechenbar ist und die verzögerten Massen (Fahrkorb, Gegengewicht) bekannt sind, läßt sich somit auch der dynamische Anteil berechnen und durch eine zusätzlich aufgebrachte Kraft bei der Prüfung der Treibfähigkeit ohne Last ersetzen.
- Mit Hilfe der beschriebenen Vorrichtung gemäß Fig.7 bis 11 kann auch die Rutschfestigkeit (Treibfähigkeit) des Seilzugs bestimmt werden. Dazu ist die Zugstange des Kraftmeßsignalgebers der Fig. 7 oder 9 oder 10 mit einem oder mehreren Seilen 2 des Seilzugs mit Hilfe einer geeigneten Seilklemme 49 zu verbinden. Die Führungshülse des Kraftmeßsignalgebers wird über ein Gurtband 47 und ein Querholz 48 an einem Festpunkt, zweckmäßig an der den Aufzugsschacht abschließenden Decke 11 befestigt. Durch Drehen des Handrades oder Bewegen des Antriebes ist bei der Rutschprüfung so lange die Zugkraft zu erhöhen, bis entweder ein ermittelter Grenzwert erreicht ist und der Signalgeber ein Warnsignal abgibt, oder das Seil oder die Seile auf der Treibscheibe zu rutschen beginnen. Das einsetzende Rutschen kann visuell z. B. durch Verschiebung aufgebrachter Markierungen oder durch Auswertung der Signale des ersten mit dem Seilzug und des zweiten mit der Treibscheibe verbindbaren Wegstreckenaufnehmers bestimmt werden.
- Die Bestimmung der Treibfähigkeit ist auch noch auf folgende Weise mit der beschriebenen Vorrichtung durchführbar:
- Die beiden Wegstreckenaufnehmer sind jeweils mit der Treibscheibe und einem Tragseil bewegungsverbunden. Außerdem ist die Steuerleitung 9 entsprechend an der Aufzugssteuerung angeschlossen. Der Aufzug wird nun aus voller Fahrt mit maximaler Bremswirkung verzögert. Die Weggeber erfassen ab dem Zeitpunkt der Verzögerungseinteilung die zurückgelegten Wege, die im Rechner mit den dazugehörigen Zeiten in einer Tabelle abgespeichert werden. Durch Auswertung dieser Tabellen läßt sich dann feststellen, ob, bzw. wie weit das Tragseil über die Treibscheibe gerutscht ist. Weiterhin läßt sich ermitteln, bei welcher Verzögerung die Haftreibung überwunden und das Rutschen eingesetzt hat und bei welcher Verzögerung die Seile wieder relativ zur Treibscheibe zum Stehen gekommen sind (Übergang Gleitreibung zur Haftreibung). Da die verzögerten Massen, (Seile, Fahrkorb und Gegenwicht) bekannt sind bzw. bestimmt werden können, kann man folglich von den Verzögerungen direkt auf die entsprechenden Kräfte hochrechnen. Es läßt sich also auch bestimmen, ab welcher Last der Aufzug abrutscht und bei welcher Last wieder Haftreibung vorliegt.
- Um Wegeunterschiede erfassen zu können, müssen beide Wegeaufnehmer entweder für gleiche Strecken gleiche Impulse abgeben oder mit einem Korrekturfaktor synchronisiert werden. Die beiden Wegemesser werden bei jedem Meßvorgang erneut automatisch kalibriert. Erreicht wird dies folgendermaßen: Zu Beginn des Bremsvorgangs also, bevor die Bremse eingefallen ist, bewegt sich der Aufzug mit nahezu konstanter Geschwindigkeit. Zwischen Tragseil und Treibscheibe wirken keine zusätzlichen Kräfte. Beide Wegemesser legen den gleichen Weg zurück. Werden die Anzahl der Impulse der beiden Wegemesser jetzt in Relation zueinander gesetzt, so ist dieser Quotient der Synchronisationsfaktor der beiden Wegemesser. Diese Synchronisation wird z.B. per Software realisiert.
- Die beschriebene Vorrichtung ist ferner in der Lage, die Steuerschaltung des Aufzugs zu überprüfen, indem die zeitliche Abfolge der Steuersignale kontrolliert wird. Z.B. läßt sich die Zeit ermitteln, die die Steuerung benötigt, um den Antrieb abzuschalten bzw. eine Bremse einfallen zu lassen, nachdem ein Sicherheitsschalter geöffnet wurde.
- Die Auswerteeinheit weist eine Reihe von zum Teil als Software-Lösung realisierte Funktionseinrichtungen auf. Eine Funktionseinrichtung ist für die Bestimmung der Geschwindigkeits- und/oder Beschleunigungswerten vorgesehen. Die Messung der Geschwindigkeit kann durch Betätigung der Tastatur getriggert sein oder es erfolgt eine Triggerung durch Signale der Steuerschaltung des Aufzugs. Meßergebnisse sind auf dem Bildschirm des Personalcomputers darstellbar und können im Bedarfsfall als vollständiges Prüfprotokoll über einen Drucker ausgegeben werden. Um insbesondere auf unzulässige Prüfwerte aufmerksam zu machen, kann der im Schnittstellenbaustein 14 enthaltene akustische Signalgeber aktiviert werden. Der Bildschirm kann auch zur Darstellung von Hinweisen für die Bedienung der Vorrichtung benutzt werden.
- Bei dem beschriebenen Ausführungsbeispiel veranlaßt die Sensorschnittstelle den Rechner beim Auftreten eines externen Ereignisses, z.B. Weiterrücken der Lochscheibe, seine Arbeit zu unterbrechen und die entsprechenden internen Speicher für Weg und evtl. Zeit zu aktualisieren.
- Es besteht jedoch auch die Möglichkeit, diese Impulse einem Vorwärts-/Rückwärtszähler zuzuführen und das Ergebnis durch einen gewöhnlichen Displaybaustein darzustellen. Den dargestellten Werten lassen sich dann entsprechende Kräfte bzw. Strecken zuordnen. In der oben beschriebenen Ausführung wurden die zu messenden Werte unmittelbar in digitale Signale umgewandelt. Es besteht alternativ die Möglichkeit, die Meßwerterfassung auch analog vorzunehmen und z.B. Geschwindigkeiten und damit auch Strecken und Beschleunigungen mit einem Tachogenerator zu erfassen oder es können Kräfte mittels Dehnungsmeßstreifen oder piezoelektrischer Druckaufnehmer ermittelt werden. Diese Analogsignale lassen sich mit einem A/D-Wandler in Digitalsignale umwandeln und dann mit einer Auswerteinheit weiterverarbeiten.
- Bei dem beschriebenen Ausführungsbeispiel wurden Zeitgeber und akustischer Signalgeber mit der nötigen Ansteuerung in der Sensorschnittstelle untergebracht. Es besteht alternativ die Möglichkeit auf diese Baugruppen zu verzichten und stattdessen, durch Software gesteuert, die entsprechenden Baugruppen im Rechner zu verwenden. Zusätzlich besteht die Möglichkeit den Datenaustausch zwischen Computer und Schnittstellenbaustein nicht über einen Ein-/Ausgabebaustein der Ein-/Ausgabeschnittstelle abzuwickeln, sondern auf Standardschnittstellen (seriell oder parallel) im Rechner zurückzugreifen.
- Die erfindungsgemäße Vorrichtung und das Verfahren geben die Möglichkeit die Fahrbewegung eines Aufzuges bezüglich der zurückgelegten Strecke und der dazugehörigen Zeit sehr fein zu erfassen. Beschleunigungen und Verzögerungen können in einem sehr feinen Zeitraster aufgezeichnet werden. Bei der Durchführung des Prüfverfahrens besteht die Möglichkeit den leeren Fahrkorb und das Gegengewicht abzubremsen oder zu beschleunigen, um aufgrund der gemessenen Bewegungsparameter Aussagen über die wirkenden Kräfte zu machen. Setzt man die Kräfte in Relation zum beladenen Aufzug, so können mit dem leeren Fahrkorb auf den Lastzustand rückgeschlossen werden.
- Bei der Durchführung des Verfahrens in der Praxis kann der leere Fahrkorb bei der nach oben gerichteten Fahrt abgebremst werden, wobei eine Bedienungsperson vor und während der Verzögerung einen Wegstreckenaufnehmer 7 gegen das laufende Tragseil hält. Die Tatsache, ob das Tragseil auf der Treibscheibe rutscht oder nicht, kann in diesem Fall dadurch visuell beurteilt werden, daß man vor der Verzögerung die Stellung des Tragseiles auf der Treibscheibe mit Hilfe eines Striches markiert.
- Es gibt jetzt folgende Möglichkeiten:
- 1. Die beim Abbremsen des Aufzuges gemessene Verzögerung ist größer oder gleich einem errechneten Grenzwert, wobei das Tragseil nicht über die Treibscheibe gerutscht ist. In diesem Fall ist die Haftreibung zwischen der Treibscheibe und dem Tragseil ausreichend, die Treibfähigkeit ist gewährleistet.
- 2. Die beim Abbremsen des Fahrkorbes gemessene Verzögerung liegt unter einem errechneten Grenzwert und das Tragseil ist über die Treibscheibe gerutscht. In diesem Fall ist die Haftreibung sowie die Treibfähigkeit ungenügend.
- 3. Die beim Abbremsen des Fahrkorbes gemessene Verzögerung liegt über einem errechneten Grenzwert sowie das Tragseil ist über die Treibscheibe gerutscht. In diesem Fall ist die Bremse weicher einzustellen und der Versuch zu wiederholen.
- 4. Die beim Abbremsen des Fahrkorbes gemessene Verzögerung liegt unter einem errechneten Grenzwert, das Tragseil ist nicht über die Treibscheibe gerutscht. In diesem Fall ist die Bremse härter einzustellen und der Versuch gleichfalls zu wiederholen.
- Durch das Verändern der Bremswirkung kann auf diese Art und Weise eine Aussage über die Treibfähigkeit der Treibscheibe unter Last getroffen werden, obwohl die Prüfung mit einem unbeladenen, bewegten Fahrkorb durchgeführt wird.
- Bei einer Weiterbildung dieses Verfahrens wird nicht nur ein Wegstreckenmesser 7 an das Tragseil, sondern ein ebensolcher Wegstreckenmesser an die Treibscheibe gehalten. In Abhängigkeit von der Zeit werden also getrennt die Bewegungen von Treibscheibe und Seil erfaßt und aufgezeichnet.
- Für die Überprüfung der Treibfähigkeit wird der leere Fahrkorb des Aufzuges entweder beschleunigt oder verzögert. Durch einen Vergleich der Bewegungen, insbesondere durch einen Vergleich der beiden Bewegungskurven läßt sich nicht nur feststellen, ob, sondern auch um wieviel das Tragseil über die Treibscheibe gerutscht ist. Es läßt sich somit durch Auswertung des Rutschweges in Abhängigkeit von der Verzögerung oder Beschleunigung eine Aussage über das dynamische Verhalten der Treibfähigkeit unter Last machen.
- Erreicht wird dies dadurch, daß während des Bremsvorganges z.B. der doppelte Wegstreckenaufnehmer gemäß Fig. 12 gleichzeitig an die Treibscheibe und an ein Seil gehalten wird.
- Die Bremse des Aufzuges wird durch einen ständig unter Strom stehenden Bremsmagneten in der Bereitschaftsstellung gehalten. Unterbricht man für das Prüfungsverfahren die Stromzufuhr zum Bremsmagneten, so setzt die Bremse ein. Die gewollte Unterbrechung der Stromzufuhr für den Magneten kann als Trigger für den Start des Meßvorganges benutzt werden.
- Der kurze Zeitraum zwischen der Unterbrechung der Stromzufuhr und dem nachfolgenden Eingreifen der Bremse kann zum synchronisieren der Wegstreckenaufnehmer für die Treibscheibe und für das Seil benutzt werden. Während dieses kurzen Zeitraumes liegt eine konstante Geschwindigkeit bei beiden Teilen vor. In diesem Zeitraum werden die beiden, dem Tragseil und der Treibscheibe zugeordneten Wegstreckenmesser dadurch synchronisiert, daß man die Anzahl der Zählimpulse des einen Wegstreckenmessers im Vergleich zu denjenigen des zweiten Messers setzt. Der so ermittelte Faktor dient zur Umrechnung von Zählimpulsen beider Aufnehmer in Strecken. Eventuelle Fertigungstoleranzen zwischen den beiden Wegstreckenmessern sowie unterschiedliche Abnutzungen werden selbsttätig eliminiert.
- Die bei der Überprüfung des Aufzuges durch die beiden Wegstreckenmesser aufgezeichneten Kurven können miteinander verglichen werden. Im Anfangsbereich decken sie sich, da vor dem Einfallen der Bremse das Tragseil mit Haftreibung an der Treibscheibe anliegt. Durch die dann einsetzende Verzögerung steigt die Kraft im Tragseil an, bis schließlich der Punkt erreicht wird, an dem diese Kraft die Haftreibung überwindet und das Tragseil auf der Treibscheibe rutscht.
- Ab diesem Zeitpunkt divergieren die beiden aufgezeichneten Kurven des Tragseiles und der Treibscheibe voneinander. Außerdem erfährt der Fahrkorb in diesem Zeitpunkt eine weniger starke Verzögerung, da der Schwellwert der Haftreibung überwunden wurde und sich diese Energie in Gleitreibung umsetzt. Gleichzeitig wird die Treibscheibe stärker gebremst, da die antreibende Kraft des Tragseiles auf die Treibscheibe um den zwischen Haftreibung und Gleitreibung liegenden Differenzbetrag reduziert wird.
- Praktisch gesehen wird das Prüfungsverfahren folgendermaßen durchgeführt:
- 1. Man stellt die Bremskraft der Bremse möglichst hoch ein, sie wirkt über das Getriebe auf die Treibscheibe.
- 2. Der leere Fahrkorb wird in Bewegung gesetzt, worauf die Bremse nach Unter brechung des Bremsmagneten zu arbeiten beginnt und die Bewegungsparameter von Treibscheibe und Tragseil getrennt aufgezeichnet werden.
- 3. Ist das Tragseil gegenüber der Treibscheibe gerutscht, so wird durch einen Vergleich der aufgezeichneten Bewegungsparameter die Treibfähigkeit berechnet und ausgegeben.
- 4. Ist das Tragseil nicht auf der Treibscheibe gerutscht, lag aber die Verzögerung über einem vorgegebenen Grenzwert, so wird die Mindesttreibfähigkeit berechnet und ausgegeben.
- 5. Ist das Tragseil nicht über der Treibscheibe gerutscht, lag jedoch die Verzögerung unter einem vorgegebenen Grenzwert, so ist der Versuch mit einer in ihrer Wirkung verstärkten Bremse zu wiederholen.
Claims (37)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE8904375U | 1989-04-07 | ||
| DE8904375U DE8904375U1 (de) | 1989-04-07 | 1989-04-07 | Vorrichtung zum Erfassen von physikalischen Kenngrößen eines Aufzugs |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0391174A1 true EP0391174A1 (de) | 1990-10-10 |
| EP0391174B1 EP0391174B1 (de) | 1992-01-29 |
| EP0391174B2 EP0391174B2 (de) | 1997-10-15 |
Family
ID=6838048
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP90105566A Expired - Lifetime EP0391174B2 (de) | 1989-04-07 | 1990-03-23 | Vorrichtung und Verfahren zum Erfassen von physikalischen Kenngrössen eines Aufzuges |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US5578801A (de) |
| EP (1) | EP0391174B2 (de) |
| JP (2) | JPH04506502A (de) |
| AT (1) | ATE72203T1 (de) |
| DE (2) | DE8904375U1 (de) |
| DK (1) | DK0391174T3 (de) |
| ES (1) | ES2029929T5 (de) |
| GR (2) | GR3004164T3 (de) |
| WO (1) | WO1990011958A1 (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1832541A1 (de) * | 2006-03-08 | 2007-09-12 | TÜV Rheinland Industrie Service GmbH | Prüfhobel mit Auflager |
| CN112875454A (zh) * | 2021-01-20 | 2021-06-01 | 中国电子产品可靠性与环境试验研究所((工业和信息化部电子第五研究所)(中国赛宝实验室)) | 电梯打滑检测方法 |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE9015495U1 (de) * | 1990-11-12 | 1992-01-02 | Technischer Überwachungs-Verein Bayern e.V., 8000 München | Meßwertaufnehmer zum Erfassen physikalischer Kenngrößen eines Personen- und/oder Lastenaufzugs |
| JP3491905B2 (ja) * | 1992-03-02 | 2004-02-03 | 株式会社日立ビルシステム | エレベータの制動性監視装置 |
| DE4217587C2 (de) * | 1992-05-21 | 1999-02-25 | Ernst Dipl Ing Kasten | Anlagen-Diagnoseverfahren |
| JPH09110326A (ja) * | 1995-07-31 | 1997-04-28 | Otis Elevator Co | エレベータかごの制御方法およびエレベータの制御機構 |
| FR2782689B1 (fr) * | 1998-05-18 | 2002-08-23 | Alsthom Gec | Bogie de vehicule ferroviaire, procede d'usinage de ce bogie et outil pour la mise en oeuvre de ce procede |
| WO2001083349A1 (de) * | 2000-04-27 | 2001-11-08 | Inventio Ag | Einrichtung zur erzeugung von schachtinformation eines aufzugs |
| US6325179B1 (en) * | 2000-07-19 | 2001-12-04 | Otis Elevator Company | Determining elevator brake, traction and related performance parameters |
| FI118684B (fi) * | 2004-01-09 | 2008-02-15 | Kone Corp | Menetelmä ja järjestelmä hissin jarrujen kunnon testaamiseksi |
| ES2409281T3 (es) * | 2004-05-28 | 2013-06-26 | Mitsubishi Denki Kabushiki Kaisha | Dispositivo de detección de deslizamiento de cuerda de elevador y sistema elevador |
| US7428951B2 (en) * | 2004-08-19 | 2008-09-30 | Mitsubishi Denki Kabushiki Kaisha | Brake device for elevator |
| FI119877B (fi) * | 2005-08-19 | 2009-04-30 | Kone Corp | Hissin turvajärjestely |
| DE102006011093A1 (de) * | 2006-03-08 | 2007-09-13 | TÜV Rheinland Industrie Service GmbH | Seilschlupf-Detektor |
| DE102006011395B4 (de) * | 2006-03-09 | 2014-12-31 | TÜV Rheinland Industrie Service GmbH | Messvorrichtung für eine Treibfähigkeitsmessung |
| DE102006042909B4 (de) * | 2006-03-28 | 2011-05-26 | Tsg Technische Service Gesellschaft Mbh | Dynamische Bestimmung der Treibfähigkeit bei Treibscheiben-getriebenen Aufzugsanlagen |
| DE102006036251A1 (de) * | 2006-08-03 | 2008-02-07 | TÜV Rheinland Industrie Service GmbH | Seilrutsch / Treibfähigkeits-Indikator |
| DE102007009602A1 (de) | 2007-02-26 | 2008-08-28 | TÜV Rheinland Industrie Service GmbH | Treibfähigkeitsmessung an Treibscheibenaufzugsanlagen |
| US8210319B2 (en) * | 2007-08-31 | 2012-07-03 | John W. Boyd | Hydraulic elevating platform assembly |
| EP2213606B1 (de) * | 2008-02-08 | 2018-04-25 | Mitsubishi Electric Corporation | Aufzugsvorrichtung |
| DE102009026992A1 (de) * | 2009-06-17 | 2010-12-30 | Dekra Testing & Inspection Gmbh | Vorrichtung und Verfahren zur Prüfung der ordnungsgemäßen Funktionsfähigkeit eines Aufzugs |
| DE102009028596A1 (de) * | 2009-08-17 | 2011-03-03 | Dekra Testing & Inspection Gmbh | Verfahren und Anordnung zur Prüfung der ordnungsgemäßen Funktionsfähigkeit eines Aufzugs |
| DE102011076241A1 (de) | 2011-03-07 | 2012-09-13 | Dekra Industrial Gmbh | Verfahren und Vorrichtung zur Prüfung der ordnungsgemäßen Funktionsfähigkeit eines Aufzugs |
| JP5823196B2 (ja) * | 2011-07-14 | 2015-11-25 | 東芝エレベータ株式会社 | トラクション能力試験装置 |
| FI123348B (fi) * | 2011-10-07 | 2013-02-28 | Kone Corp | Hissin valvontajärjestely sekä menetelmä hissin valvomiseksi |
| WO2014037608A1 (en) | 2012-09-05 | 2014-03-13 | Kone Corporation | Axial flux motor intended for fixing to a machine and method for fixing the axial flux motor to a machine |
| EP2774886B1 (de) * | 2013-03-04 | 2015-11-18 | Kone Corporation | Antriebsscheibenaufzug |
| EP2883826B1 (de) * | 2013-12-16 | 2018-07-04 | Inventio AG | Bremse für Aufzugsanlagen |
| ES2602062T3 (es) * | 2014-05-19 | 2017-02-17 | Kone Corporation | Un ascensor |
| EP3095743B1 (de) * | 2015-05-20 | 2018-07-25 | KONE Corporation | Aufzug mit seilüberwachungsanordnung um verschiebung der flachgurte zu detektieren |
| US10745244B2 (en) * | 2017-04-03 | 2020-08-18 | Otis Elevator Company | Method of automated testing for an elevator safety brake system and elevator brake testing system |
| US11198586B2 (en) * | 2019-07-03 | 2021-12-14 | Otis Elevator Company | Braking deceleration measurement of an elevator system |
| CN110282518B (zh) * | 2019-07-15 | 2020-10-16 | 福建省特种设备检验研究院 | 一种电梯制停距离的检测方法 |
| CN112141844A (zh) * | 2020-09-09 | 2020-12-29 | 通辽市特种设备检验所 | 一种用于老旧电梯安全评估的综合检测系统 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3773146A (en) * | 1972-05-09 | 1973-11-20 | Reliance Electric Co | Elevator electronic position device |
| US3781901A (en) * | 1972-03-14 | 1973-12-25 | E Morrison | Method for evaluating elevator performance |
| US4085823A (en) * | 1975-11-03 | 1978-04-25 | Westinghouse Electric Corporation | Elevator system |
| GB2136158A (en) * | 1983-02-22 | 1984-09-12 | Otis Elevator Co | Servicing a software-controlled lift |
| EP0192513A1 (de) * | 1985-02-12 | 1986-08-27 | Societe Logilift S.A.R.L. | Geregeltes Steuerungsverfahren eines elektrischen Motors für die Verstellung eines beweglichen Körpers und Steuereinrichtung für die Verwirklichung des Verfahrens |
| US4698780A (en) * | 1985-10-08 | 1987-10-06 | Westinghouse Electric Corp. | Method of monitoring an elevator system |
| EP0252266A1 (de) * | 1986-07-07 | 1988-01-13 | Inventio Ag | System zur Fernverwaltung von Aufzugsanlagen |
| DE3822466A1 (de) * | 1987-07-21 | 1989-02-02 | Univ Magdeburg Tech | Verfahren zur kontrolle von lage und bewegung seilbewegter transporteinrichtungen |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58167373A (ja) * | 1982-03-29 | 1983-10-03 | 三菱電機株式会社 | エレベ−タの移動距離検出装置 |
| SU1253928A1 (ru) * | 1983-09-14 | 1986-08-30 | Всесоюзный Научно-Исследовательский Институт Горной Механики Им.М.М.Федорова | Устройство дл исключени скольжени канатов по шкивам трени шахтной подъемной установки |
| DE3713271A1 (de) * | 1987-04-18 | 1988-11-03 | Siemens Ag | Verfahren und einrichtung zur wegregelung eines positionsantriebes |
| EP0297232B1 (de) * | 1987-06-30 | 1991-08-07 | Inventio Ag | Istwertgeber für den Lageregelkreis eines Aufzugsantriebes |
| FI84050C (fi) * | 1988-04-18 | 1991-10-10 | Kone Oy | Foerfarande foer kontroll av friktionen mellan drivskiva och baerlinor till en hiss. |
| US4833380A (en) * | 1988-07-01 | 1989-05-23 | Magee John E | Hoist motor protection |
| FI89580C (fi) * | 1988-10-25 | 1993-10-25 | Kone Oy | Foerfarande och anordning foer maetning och avstaemning av ett hissystem |
| US4936419A (en) * | 1988-10-26 | 1990-06-26 | Montgomery Elevator Co. | Elevator diagnostic display system |
| DE3911391C5 (de) * | 1989-04-07 | 2010-04-29 | TÜV SÜD Industrie Service GmbH | Verfahren und Vorrichtung zum Überprüfen der Treibfähigkeit |
| CA2002409C (en) * | 1989-11-07 | 1995-03-14 | Klaus Katzy | System for monitoring the operation of a cage moving in a mine shaft |
-
1989
- 1989-04-07 DE DE8904375U patent/DE8904375U1/de not_active Expired
-
1990
- 1990-03-23 DK DK90105566.5T patent/DK0391174T3/da active
- 1990-03-23 US US07/688,487 patent/US5578801A/en not_active Expired - Lifetime
- 1990-03-23 WO PCT/EP1990/000477 patent/WO1990011958A1/de unknown
- 1990-03-23 ES ES90105566T patent/ES2029929T5/es not_active Expired - Lifetime
- 1990-03-23 EP EP90105566A patent/EP0391174B2/de not_active Expired - Lifetime
- 1990-03-23 AT AT90105566T patent/ATE72203T1/de not_active IP Right Cessation
- 1990-03-23 JP JP2504730A patent/JPH04506502A/ja active Pending
- 1990-03-23 DE DE9090105566T patent/DE59000040D1/de not_active Expired - Lifetime
- 1990-04-07 JP JP2092974A patent/JPH0367879A/ja active Pending
-
1992
- 1992-03-26 GR GR920400528T patent/GR3004164T3/el unknown
-
1998
- 1998-01-07 GR GR980400012T patent/GR3029520T3/el unknown
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3781901A (en) * | 1972-03-14 | 1973-12-25 | E Morrison | Method for evaluating elevator performance |
| US3773146A (en) * | 1972-05-09 | 1973-11-20 | Reliance Electric Co | Elevator electronic position device |
| US4085823A (en) * | 1975-11-03 | 1978-04-25 | Westinghouse Electric Corporation | Elevator system |
| GB2136158A (en) * | 1983-02-22 | 1984-09-12 | Otis Elevator Co | Servicing a software-controlled lift |
| EP0192513A1 (de) * | 1985-02-12 | 1986-08-27 | Societe Logilift S.A.R.L. | Geregeltes Steuerungsverfahren eines elektrischen Motors für die Verstellung eines beweglichen Körpers und Steuereinrichtung für die Verwirklichung des Verfahrens |
| US4698780A (en) * | 1985-10-08 | 1987-10-06 | Westinghouse Electric Corp. | Method of monitoring an elevator system |
| EP0252266A1 (de) * | 1986-07-07 | 1988-01-13 | Inventio Ag | System zur Fernverwaltung von Aufzugsanlagen |
| DE3822466A1 (de) * | 1987-07-21 | 1989-02-02 | Univ Magdeburg Tech | Verfahren zur kontrolle von lage und bewegung seilbewegter transporteinrichtungen |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1832541A1 (de) * | 2006-03-08 | 2007-09-12 | TÜV Rheinland Industrie Service GmbH | Prüfhobel mit Auflager |
| CN112875454A (zh) * | 2021-01-20 | 2021-06-01 | 中国电子产品可靠性与环境试验研究所((工业和信息化部电子第五研究所)(中国赛宝实验室)) | 电梯打滑检测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US5578801A (en) | 1996-11-26 |
| DK0391174T3 (da) | 1992-03-23 |
| WO1990011958A1 (de) | 1990-10-18 |
| JPH0367879A (ja) | 1991-03-22 |
| DE59000040D1 (de) | 1992-03-12 |
| ES2029929T5 (es) | 1998-02-01 |
| GR3004164T3 (en) | 1993-03-31 |
| EP0391174B1 (de) | 1992-01-29 |
| DE8904375U1 (de) | 1989-07-27 |
| ATE72203T1 (de) | 1992-02-15 |
| EP0391174B2 (de) | 1997-10-15 |
| JPH04506502A (ja) | 1992-11-12 |
| ES2029929T3 (es) | 1992-10-01 |
| GR3029520T3 (en) | 1999-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0391174B1 (de) | Vorrichtung und Verfahren zum Erfassen von physikalischen Kenngrössen eines Aufzuges | |
| EP0390972B1 (de) | Verfahren zum Erfassen von physikalischen Kenngrössen eines Aufzuges | |
| EP2516305B1 (de) | Verfahren und vorrichtung zur bestimmung der bewegung und/oder der position einer aufzugskabine | |
| EP1445075B1 (de) | Verfahren zum Überwachen eines Roboters und Roboter mit einer Überwachungseinrichtung | |
| EP0755894B1 (de) | Verfahren und Einrichtung zur Messung der Last in einer Aufzugskabine | |
| DE68919128T2 (de) | Vorrichtung zur Regelung der Wickelspannung eines Reifenbestandteiles. | |
| DE112014007092B4 (de) | Aufzugsteuervorrichtung | |
| DE3904017A1 (de) | Ueberwachungseinrichtung fuer einen bandantrieb | |
| EP3347295B1 (de) | Personentransportanlage mit einer einrichtung zur betriebszustandsbestimmung | |
| DE2735925A1 (de) | Pruefeinrichtung fuer kraftfahrzeuge | |
| DE3912575C2 (de) | ||
| DE4217587C2 (de) | Anlagen-Diagnoseverfahren | |
| DE3918665A1 (de) | Verfahren und vorrichtung zum steuern eines formatlaengengerechten schneidens von materialbahnen | |
| DE4130679C2 (de) | Vorrichtung zum Verhindern von Druckwerkschäden | |
| EP1870369A1 (de) | Verfahren zur Prüfung einer Aufzugsbremseinrichtung, ein Verfahren zur Inbetriebnahme einer Aufzugsanlage und eine Einrichtung zur Durchführung einer Inbetriebnahme | |
| DE112015006188T5 (de) | Aufzugdiagnosevorrichtung | |
| DE2642915A1 (de) | Bremse, insbesondere fuer foerdermaschinen im untertagebergbau | |
| EP0103162A2 (de) | Mess- und Steuereinrichtung für an Seilen befestigte Lasten, insbesondere für Theaterpunktzüge | |
| DE19611878A1 (de) | Verfahren zur Störungserfassung im Transport einer durchgehenden Papierbahn in einer Druckmaschine | |
| EP0731358A1 (de) | Verfahren und Einrichtung zum Prüfen eines Geschwindigkeitsbegrenzers einer Aufzugsanlage | |
| DE102020211550A1 (de) | Antriebssystem zum Bewegen einer höhenverstellbaren Tischplatte, Tisch mit einem solchen Antriebssystem und Verfahren zum Erfassen einer Kollision einer höhenverstellbaren Tischplatte | |
| DE102016204422A1 (de) | Vorrichtung und Verfahren zur Überprüfung einer Lastbegrenzungseinrichtung insb. von einer fördertechnischen Anlage | |
| DE2348026A1 (de) | Verfahren und vorrichtung zum bremsen und weiterschalten einer schnellaufenden werkzeugmaschinenspindel | |
| DE3522809C2 (de) | ||
| AT520771B1 (de) | Verfahren zum Betreiben eines Stopfaggregats einer Gleisbaumaschine sowie Stopfvorrichtung zur Gleisbettverdichtung und Gleisbaumaschine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT CH DE DK ES FR GB GR IT LI NL SE |
|
| 17P | Request for examination filed |
Effective date: 19900924 |
|
| 17Q | First examination report despatched |
Effective date: 19910118 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT CH DE DK ES FR GB GR IT LI NL SE |
|
| REF | Corresponds to: |
Ref document number: 72203 Country of ref document: AT Date of ref document: 19920215 Kind code of ref document: T |
|
| ITF | It: translation for a ep patent filed | ||
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) | ||
| REF | Corresponds to: |
Ref document number: 59000040 Country of ref document: DE Date of ref document: 19920312 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 |
|
| ET | Fr: translation filed | ||
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2029929 Country of ref document: ES Kind code of ref document: T3 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| 26 | Opposition filed |
Opponent name: SIEMENS AKTIENGESELLSCHAFT Effective date: 19921027 |
|
| REG | Reference to a national code |
Ref country code: GR Ref legal event code: FG4A Free format text: 3004164 |
|
| NLR1 | Nl: opposition has been filed with the epo |
Opponent name: SIEMENS AG. |
|
| EAL | Se: european patent in force in sweden |
Ref document number: 90105566.5 |
|
| APAC | Appeal dossier modified |
Free format text: ORIGINAL CODE: EPIDOS NOAPO |
|
| PLAW | Interlocutory decision in opposition |
Free format text: ORIGINAL CODE: EPIDOS IDOP |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PUE Owner name: TECHNISCHER UEBERWACHUNGS-VEREIN BAYERN E.V.;TECHN Ref country code: CH Ref legal event code: NV Representative=s name: ISLER & PEDRAZZINI AG Ref country code: CH Ref legal event code: PFA Free format text: TECHNISCHER UEBERWACHUNGS-VEREIN BAYERN SACHSEN E.V.;TECHNISCHER UEBERWACHUNGS-VEREIN BAYERN E.V. -DANN IN- TECHNISCHER UEBERWACHUNGS-VEREIN BAYERN E.V.;TECHNISCHER UEBERWACHUNGS-VEREIN BAYERN HESSEN SACHSEN E.V. * TECHNISCHER UEBERWACHUNGS-VEREIN BAYERN E.V. TRANSFER- TECHNISCHER UEBERWACHUNGS-VEREIN BAYERN SACHSEN E.V.;TECHNISCHER UEBERWACHUNGS-VEREIN BAYERN E.V. |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: TP |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: PC2A |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: 732E |
|
| NLS | Nl: assignments of ep-patents |
Owner name: TUEV BAU- UND BETRIEBSTECHNIK GMBH UNTERNEHMENSGRU |
|
| PUAH | Patent maintained in amended form |
Free format text: ORIGINAL CODE: 0009272 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: PATENT MAINTAINED AS AMENDED |
|
| 27A | Patent maintained in amended form |
Effective date: 19971015 |
|
| AK | Designated contracting states |
Kind code of ref document: B2 Designated state(s): AT CH DE DK ES FR GB GR IT LI NL SE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: AEN Free format text: AUFRECHTERHALTUNG DES PATENTES IN GEAENDERTER FORM |
|
| NLR2 | Nl: decision of opposition | ||
| GBTA | Gb: translation of amended ep patent filed (gb section 77(6)(b)/1977) | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: THE PATENT HAS BEEN ANNULLED BY A DECISION OF A NATIONAL AUTHORITY Effective date: 19980107 |
|
| ITF | It: translation for a ep patent filed | ||
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: DC2A Kind code of ref document: T5 Effective date: 19971222 |
|
| ET3 | Fr: translation filed ** decision concerning opposition | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 19980226 Year of fee payment: 9 |
|
| NLR3 | Nl: receipt of modified translations in the netherlands language after an opposition procedure | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 19980319 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DK Payment date: 19980325 Year of fee payment: 9 Ref country code: SE Payment date: 19980325 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 19980331 Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 19980422 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GR Payment date: 19990226 Year of fee payment: 10 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990324 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990331 Ref country code: DK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990331 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19991001 |
|
| EUG | Se: european patent has lapsed |
Ref document number: 90105566.5 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19991130 |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee |
Effective date: 19991001 |
|
| EUG | Se: european patent has lapsed |
Ref document number: 90105566.5 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EBP |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20000324 Year of fee payment: 11 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020325 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20030410 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20050323 |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20090324 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20090429 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20100322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20100322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20100323 |