-
HINTERGRUND DER ERFINDUNG
-
1. Gebiet der Erfindung
-
Die vorliegende Erfindung betrifft eine Fahrzeugsteuervorrichtung, eine Ziel-Führungsfahrzeug-Zuweisungsvorrichtung und ein Fahrzeugsteuerverfahren, und insbesondere eine Fahrzeugsteuervorrichtung, eine Ziel-Führungsfahrzeug-Zuweisungsvorrichtung und ein Fahrzeugsteuerverfahren, die ein vorausfahrendes Zielfahrzeug spezifizieren, wenn eine Vielzahl von Fahrzeugen in einer Reihe fährt.
-
2. Beschreibung des Standes der Technik
-
Die japanische Patentanmeldungsoffenlegungsschrift Nr. 2005-115637 (
JP-A-2005-115637 ) beschreibt eine Vorrichtung, die Fahrumstände von Fahrzeugen um das eigene bzw. Ausgangsfahrzeug erfasst. Die Vorrichtung kartografiert die Positionen, die durch Informationen über vorausfahrende Fahrzeuge, die von einer Radarvorrichtung bezogen werden, und Informationen über vorausfahrende Fahrzeuge, die von einer Zwischenfahrzeugkommunikationsvorrichtung in einem Kartografiegebiet bezogen werden, angegeben sind, basierend auf der Position des Ausgangsfahrzeugs, und wenn sich überlagernde Fahrzeugpositionen kartografiert werden, wird die Zuverlässigkeit von Fahrzeugpositionen angebenden Informationen berechnet, um die Fahrzeugpositionen auf der Grundlage der berechneten Zuverlässigkeit abzuschätzen.
-
Die Kraftstoffeffizienz und die gegenseitige Sicherheit einer Gruppe von Fahrzeugen, die entlang einer Straße fahren, die nur für Automobile erlaubt ist, wie etwa eine Autobahn, können dadurch verbessert werden, dass die Gruppe von Fahrzeugen in einer Reihe fährt, und eine unnötige Beschleunigung und Verzögerung einhergehend mit Schwankungen der Zwischenfahrzeugdistanz vermieden wird. Wenn Fahrzeuge in Reihe fahren, ist es für ein nachfahrendes Fahrzeug notwendig, ein Führungsfahrzeug zu spezifizieren und gemäß der Position und der Geschwindigkeit des Führungsfahrzeugs zu fahren. Wenn die in der
JP-A-2005-115637 beschriebene Vorrichtung verwendet wird, um ein Zielführungsfahrzeug zu bestimmen, wenn das Ausgangsfahrzeug einen Fahrzeugverfolgungsmodus aktiviert hat, kann es jedoch schwierig sein zu bestimmen, welches Fahrzeug nahe des Ausgangsfahrzeugs als das Zielführungsfahrzeug identifiziert werden sollte, und das als das Ziel-Führungsfahrzeug ausgewählte Fahrzeug kann inkorrekt sein.
-
ZUSAMMENFASSUNG DER ERFINDUNG
-
Die vorliegende Erfindung stellt eine Fahrzeugsteuervorrichtung, eine Ziel-Führungsfahrzeug-Zuweisungsvorrichtung und ein Fahrzeugsteuerverfahren bereit, die präzise ein Ziel-Führungsfahrzeug spezifizieren, auch wenn das Ziel-Führungsfahrzeug und andere Fahrzeuge einander nahe sind.
-
Ein erster Aspekt der vorliegenden Erfindung ist auf eine Fahrzeugsteuervorrichtung gerichtet, die eine Fahrzeugumstandsbezugseinrichtung zum Beziehen von ersten Informationen, die eine Bewegung von anderen Fahrzeugen als das Ausgangsfahrzeug über Kommunikation angeben, umfasst. Die Fahrzeugsteuervorrichtung steuert das eigene bzw. Ausgangsfahrzeug durch Verwenden einer Komponente, in einer Richtung, der durch die Fahrzeugumstandsbezugseinrichtung bezogenen ersten Informationen.
-
In dem ersten Aspekt können die ersten Informationen, die die Bewegung der anderen Fahrzeuge angeben, weiterhin eine Geschwindigkeit und/oder Beschleunigung der anderen Fahrzeuge umfassen.
-
In dem ersten Aspekt kann die eine Richtung zusätzlich eine Fahrtrichtung des Ausgangsfahrzeugs sein.
-
In dem ersten Aspekt kann die eine Richtung weiterhin eine Richtung von den anderen Fahrzeugen zu dem Ausgangsfahrzeug sein.
-
Die Fahrzeugsteuervorrichtung gemäß dem ersten Aspekt kann weiterhin einen Frontsensor umfassen, der an dem Ausgangsfahrzeug angebracht ist, und die Steuerung des Ausgangsfahrzeugs kann ein Vergleichen der bezogenen ersten Informationen mit zweiten Informationen über Fahrzeuge, die dem Ausgangsfahrzeug vorausfahren, umfassen, die durch den Frontsensor erfasst werden, um ein Ziel-Führungsfahrzeug zu spezifizieren.
-
Zusätzlich kann in dem ersten Aspekt die Steuerung des Ausgangsfahrzeugs weiterhin ein adaptives Geschwindigkeitsregelungssystem, das dem Ziel-Führungsfahrzeug hinterherfährt, während eine vorbestimmte Distanz von dem Ziel-Führungsfahrzeug beibehalten wird, und/oder eine durch ein Unfallwarnsystem ausgeführte Steuerung umfassen, die eine Kollision mit dem Ziel-Führungsfahrzeug voraussagt, um eine Kollision mit dem Ziel-Führungsfahrzeug zu vermeiden oder einen Aufprall zu reduzieren, wenn eine Kollision mit dem Ziel-Führungsfahrzeug auftritt.
-
Ein zweiter Aspekt der vorliegenden Erfindung ist auf eine Ziel-Führungsfahrzeug-Zuweisungsvorrichtung gerichtet, die eine Steuereinrichtung zum Vergleichen mit durch eine Zwischenfahrzeugkommunikation bezogenen Umgebungsfahrzeugumständen mit Fahrzeuginformationen über vorausfahrende Fahrzeuge, die über einen Frontsensor bezogen werden, der in einem Ausgangsfahrzeug angebracht ist, um ein Ziel-Führungsfahrzeug zu spezifizieren, in der die Steuereinrichtung eine durch die Zwischenfahrzeugkommunikation bezogene Geschwindigkeit und eine durch den Frontsensor bezogene Geschwindigkeit bezüglich einer Geschwindigkeitskomponente, in einer Fahrtrichtung, des Ausgangsfahrzeugs vergleicht, um das Ziel-Führungsfahrzeug zu spezifizieren.
-
Vorzugsweise führt die Steuereinrichtung den Vergleich bezüglich der Geschwindigkeitskomponente zwischen Fahrzeugen durch, deren Position, die durch die Zwischenfahrzeugkommunikation bezogen wird, und deren Position über den Frontsensor im Wesentlichen miteinander übereinstimmen.
-
Ein dritter Aspekt der vorliegenden Erfindung ist auf ein Fahrzeugsteuerverfahren gerichtet. Das Fahrzeugsteuerverfahren umfasst: Beziehen von ersten Informationen, die eine Bewegung von anderen Fahrzeugen als das Ausgangsfahrzeug angeben, über Kommunikation; und Steuern des Ausgangsfahrzeugs durch Verwenden einer Komponente, in einer Richtung, der bezogenen ersten Informationen, die die Bewegung der anderen Fahrzeuge angeben.
-
Gemäß der vorliegenden Erfindung wird ein Ziel-Führungsfahrzeug auf der Grundlage einer Fahrzeuggeschwindigkeitskomponente in der Fahrtrichtung eines Ausgangsfahrzeugs spezifiziert. Daher können störende Fahrzeuge und Fahrzeuge, die eine Fahrspur verlassen, auf der das Ausgangsfahrzeug fährt, beispielsweise als Ziel-Führungsfahrzeug ausgeschlossen werden, was eine präzise Bestimmung des Ziel-Führungsfahrzeugs ermöglicht. Die Bestimmungspräzision kann weiterhin durch eine Verfeinerung bezüglich Positionsinformationen verbessert werden.
-
KURZE BESCHREIBUNG DER ZEICHNUNGEN
-
Die vorstehenden und weitere Merkmale und Vorteile der Erfindung werden anhand der nachfolgenden Beschreibung von beispielhaften Ausführungsbeispielen mit Bezugnahme auf die anhängenden Zeichnungen ersichtlich, in denen gleiche Bezugszeichen verwendet werden, um gleiche Elemente zu bezeichnen, und in denen gilt:
-
1 ist ein Blockdiagramm, das die Konfiguration der Ziel-Führungsfahrzeug-Zuweisungsvorrichtung gemäß einem Ausführungsbeispiel der vorliegenden Erfindung zeigt;
-
2 ist ein Flussdiagramm, das die Operation der Vorrichtung von 1 zeigt;
-
3A und 3B veranschaulichen eine Koordinatenkonvertierung in ein Ausgangsfahrzeug-Koordinatensystem in der Vorrichtung von 1; und
-
4 veranschaulicht, wie das Ziel-Führungsfahrzeug in der Vorrichtung von 1 spezifiziert wird.
-
DETAILLIERTE BESCHREIBUNG VON AUSFÜHRUNGSBEISPIELEN
-
Ein beispielhaftes Ausführungsbeispiel der vorliegenden Erfindung wird nachstehend detailliert mit Bezugnahme auf die anhängenden Zeichnungen beschrieben. Um das Verständnis der Beschreibung zu erleichtern, sind gleiche Bestandteile in den Zeichnungen mit gleichen Bezugszeichen versehen, soweit dies möglich ist, um eine sich wiederholende Beschreibung zu vermeiden.
-
1 ist ein Blockdiagramm, das die Konfiguration einer Ziel-Führungsfahrzeug-Zuweisungsvorrichtung gemäß der vorliegenden Erfindung zeigt. Die Vorrichtung ist durch Kombinieren einer Fahrzeugfolge-ECU 10, die als eine Steuersektion dient und die einen Hauptabschnitt der Vorrichtung bildet, einer Fahrzeugsteuer-ECU 11, die das Verhalten eines Fahrzeugs steuert, einer Navigations-ECU 12, die eine Route navigiert, usw. ausgebildet. Jede der ECUs ist durch eine CPU, einen ROM, einen RAM, usw. ausgebildet und kann als zugewiesene Hardware ausgebildet sein, kann durch Kombinieren einer Vielzahl von Hardwareteilen ausgebildet sein, oder kann Teile oder die Gesamtheit der Hardware teilen. Jede ECU kann konfiguriert sein, um Daten auszutauschen, beispielsweise durch Verwenden eines fahrzeuginternen LAN.
-
Die Navigations-ECU 12 ist mit einem globalen Positionssystem-(GPS)-Empfänger 20, der ein Signal von einem GPS-Satelliten durch Verwenden einer Antenne 21 empfängt; einer Zwischenfahrzeug-Kommunikationseinheit 30, die Fahrzeuginformationen (Fahrzeugumstände) jedes Fahrzeugs mit anderen Fahrzeugen über eine Antenne 31 kommuniziert; einer Gyro-Vorrichtung 22 für eine autonome Navigation; einer Karten-Datenbank (DB) 23, die Karteninformationen speichert; einer Anzeige 24 für eine Anzeige; und einem Lautsprecher 25 für eine Tonausgabe, verbunden.
-
Die Fahrzeugfolge-ECU 10 empfängt die Ausgabe von einem Umgebungsbedingungssensor 40, der Hindernisse und andere Fahrzeuge um das Fahrzeug basierend auf der Ausgabe von einer Radarvorrichtung 41 erfasst, die an dem Frontabschnitt des Fahrzeugs angebracht ist, und empfängt eine Ausgabe von einem Fahrzeugzustandsgrößensensor 50, der einen Fahrzeugzustand des Ausgangsfahrzeugs erfasst. Beispiele des Fahrzeugzustandsgrößensensors 50 umfassen einen Radgeschwindigkeitssensor, der eine Drehzahl jedes Rads erfasst, einen Beschleunigungssensor, der eine Beschleunigung in der Längsrichtung des Fahrzeugs erfasst, einen Querbeschleunigungssensor, der eine Beschleunigung in der Querrichtung des Fahrzeugs erfasst, einen Gierratensensor, der eine Gierrate bzw. Giergeschwindigkeit erfasst, und einen Lenkwinkelsensor, der einen Lenkwinkel erfasst. Die Radarvorrichtung 41 strahlt eine elektromagnetische Welle (beispielsweise eine Millimeterwelle) nach vorne von dem Fahrzeug ab und empfängt die von anderen Objekten reflektierte Welle, um Informationen über die Position und die relative Geschwindigkeit der anderen Objekte auf der Basis der empfangenen reflektierten Welle zu beziehen.
-
Als Nächstes wird die Operation der Vorrichtung mit Bezugnahme auf das Flussdiagramm von 2 beschrieben. Die Operation wird durch die Fahrzeugfolge-ECU 10 in Kooperation mit der Navigations-ECU 12 und der Fahrzeugsteuer-ECU 11 in vorbestimmten Intervallen, beginnend wenn der Fahrzeugfolgemodus aktiviert ist, ausgeführt, bis diese entweder manuell oder automatisch beendet wird, wenn Bedingungen nicht länger eine Fahrzeugverfolgung zulassen.
-
Zuerst werden Informationen bezüglich eines sich in der Umgebung befindlichen Fahrzeugs bzw. Umgebungs-Fahrzeuginformationen von der Zwischenfahrzeug-Kommunikationseinheit 30 empfangen (Schritt S1). Dabei umfassen Beispiele der erhaltenen Umgebungs-Fahrzeuginformationen die Fahrzeug-ID, die für jedes Fahrzeug einzigartig ist, die Geschwindigkeit, die Beschleunigung, die Position und die Orientierung (d. h. die Fahrtrichtung) des Fahrzeugs. Die Zwischenfahrzeug-Kommunikationseinheit 30 überträgt ebenso Informationen über die Geschwindigkeit und die Beschleunigung des Fahrzeugs, die durch den Fahrzeugzustandsgrößensensor 50 bezogen wurden, und die Position und die Fahrtrichtung des Fahrzeugs, die durch die Navigations-ECU 12 bezogen wurden, zusammen mit der Fahrzeug-ID des Ausgangsfahrzeugs zu anderen Fahrzeugen. Andere Fahrzeuge übertragen und empfangen ebenso solche Daten. Daher können Fahrzeuginformationen zwischen Fahrzeugen ausgetauscht werden, welche die Zwischenfahrzeug-Kommunikationsfunktion besitzen. Bei diesem Ereignis gilt in dem Fall, in dem Positionsinformationen nur von GPS-Daten berechnet werden, dass ein großer Fehler der Positionsinformationen auftreten kann. Daher können die Positionsinformationen gemäß autonomen Navigationsdaten vor einer Übertragung korrigiert werden.
-
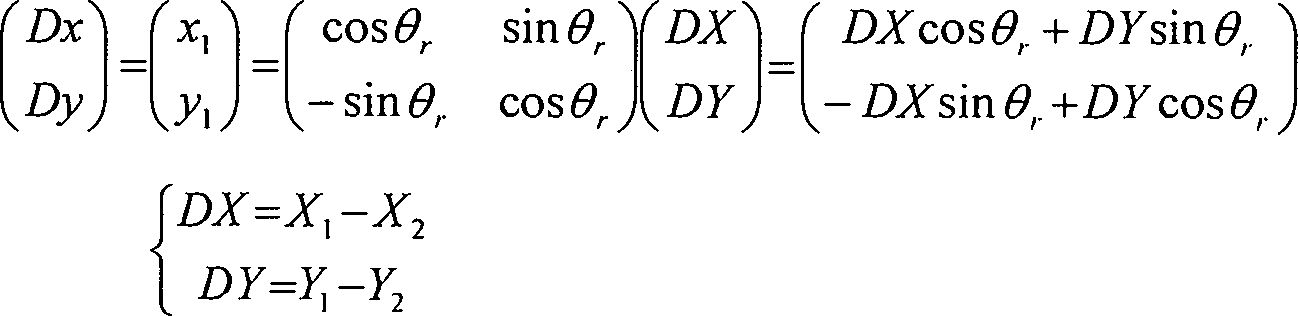
Als Nächstes werden die Position und die Geschwindigkeit in Daten über jedes Fahrzeug, die als die Umgebungs-Fahrzeuginformationen erhalten werden, in ein Koordinatensystem konvertiert, welches eine Koordinatenachse in der Fahrtrichtung des Ausgangsfahrzeugs aufweist, um eine relative Position und eine relative Geschwindigkeit zu berechnen (Schritt S3). Die Koordinatensystemkonversion wird insbesondere mit Bezugnahme auf die 3A und 3B beschrieben. Das Koordinatensystem, das die Fahrzeugposition und die Fahrtrichtung in der Zwischenfahrzeug-Kommunikation darstellt, ist, wie in 3A gezeigt ist, als ein XY-Koordinatensystem definiert. Hier sind die Positionskoordinaten jedes Fahrzeugs durch die Positionen des Schwerpunkts jedes Fahrzeugs definiert. Die Positionskoordinate eines Ausgangsfahrzeugs 100 in dem XY-Koordinatensystem ist als (X2, Y2) definiert, die Positionskoordinate eines weiteren Fahrzeugs 110 ist als (X1, Y1) definiert, und die Radien von Fehlern von Positionskoordinaten des Ausgangsfahrzeugs 100 und des anderen Fahrzeugs 110 sind entsprechend als σ2, σ1 definiert. Die Geschwindigkeit des Ausgangsfahrzeugs 100 ist als V0 definiert, die Geschwindigkeit des anderen Fahrzeugs 110 ist als V1 definiert, und die zwischen Geschwindigkeitsvektoren des Ausgangsfahrzeugs 100 und des anderen Fahrzeugs 110 und der X-Achse gebildeten Winkel sind entsprechend als θ0, θ1 definiert. Das Koordinatensystem wird in ein in 3B gezeigtes Koordinatensystem konvertiert, in dem die Position des Schwerpunkts des Ausgangsfahrzeugs 100 als Ausgangspunkt definiert ist, die Richtung des Geschwindigkeitsvektors des Ausgangsfahrzeugs 100 als die X-Achse definiert ist, und die Richtung senkrecht zu der Richtung des Geschwindigkeitsvektors des Ausgangsfahrzeugs 100 als die Y-Achse definiert ist.
-
Weil diese Konversion eine Rotationstransformation ist, ist die folgende Gleichung erfüllt: Gleichung 1
-
Der Fehler σ
r1 in einer relativen Position kann durch die folgende Gleichung durch Verwenden der Additivität einer Abweichung erhalten werden: Gleichung 2
-
Außerdem, weil der zwischen dem Geschwindigkeitsvektor des anderen Fahrzeugs 110 und der X-Achse gebildete Winkel θr1 (θ1 – θ0) beträgt, kann eine Geschwindigkeitskomponente V1X der Geschwindigkeit V1 in der Fahrtrichtung des Ausgangsfahrzeugs 100 (die Richtung der X-Achse) durch die folgende Gleichung dargestellt werden:
-
Gleichung 3
-
-
Als Nächstes werden aus den relativen Positionen der anderen Fahrzeuge 110, die durch Verwenden der Radarvorrichtung 41 bezogen werden, und den relativen Positionen der anderen Fahrzeuge 110, die in Schritt S3 berechnet werden, solche relative Positionen, die innerhalb einer vorbestimmten Distanz voneinander liegen, das heißt, die miteinander innerhalb des vorstehend diskutierten Bereichs des Fehlers σr1 übereinstimmen, beispielsweise extrahiert werden (Schritt S5). Anschließend werden aus den extrahierten relativen Positionen solche relative Positionen, die miteinander bezüglich einer relativen Geschwindigkeit in der Fahrtrichtung des Ausgangsfahrzeugs 100 innerhalb eines vorbestimmten Fehlerbereichschwellenwerts Vth übereinstimmen, extrahiert (Schritt S7). In dem in 3B gezeigten Beispiel ist die Differenz (V1x – V0), die der Differenz zwischen V1x und V0 entspricht, die in Schritt S3 berechnet wurde, die relative Geschwindigkeit des anderen Fahrzeugs 110, dessen Umgebungs-Fahrzeuginformationen erhalten wurden, zu dem Ausgangsfahrzeug 100 in der Fahrtrichtung des Ausgangsfahrzeugs 100. Die aus den Umgebungs-Fahrzeuginformationen erhaltene relative Geschwindigkeit wird mit einer durch die Radarvorrichtung 41 bezogenen relativen Geschwindigkeit Vr verglichen. Es kann bestimmt werden, dass die relativen Geschwindigkeiten übereinstimmen, wenn die Differenz zwischen den relativen Geschwindigkeiten innerhalb ±Vth liegt. Der Schwellenwert Vth ist beispielsweise basierend auf der Messpräzision der Radarvorrichtung 41 und des Navigationssystems eingestellt.
-
Ein Fahrzeug, das solche Bedingungen erfüllt und das daher extrahiert wird, wird als ein Kandidat für ein Führungsfahrzeug gesetzt (Schritt S9). Wenn eine Vielzahl von Führungsfahrzeug-Kandidaten vorliegt, wird das Fahrzeug mit dem höchsten Übereinstimmungsgrad als das vorausfahrende Fahrzeug identifiziert (Schritt S11). Die Fahrzeugsteuer-ECU 11 passt die Geschwindigkeit des Ausgangsfahrzeugs durch Steuern des Zustands einer Maschine und einer Bremse an, um dem anderen Fahrzeug 110, das als das Führungsfahrzeug identifiziert ist, zu folgen.
-
4 veranschaulicht, wie die Ziel-Führungsfahrzeug-Zuweisungsvorrichtung gemäß der vorliegenden Erfindung ein Führungsfahrzeug zuweist. Das Ausgangsfahrzeug 100 befindet sich vor einer Zusammenlaufsektion, und andere Fahrzeuge 200 bis 220 befinden sich an Positionen nahe der Zusammenlaufsektion. Die Geschwindigkeitskomponenten V1x und V2x in der Fahrtrichtung des Ausgangsfahrzeugs 100, der Fahrzeuge 210 und 220, die versuchen, auf die Fahrspur einzufahren, auf der das Ausgangsfahrzeug 100 fährt, sind unter den Ist-Geschwindigkeiten V1 und V2 der Fahrzeuge 210 und 220, aufgrund der Differenz der Fahrtrichtung der anderen Fahrzeuge 200 bis 220, auch wenn die Geschwindigkeiten V1 bis V3 der anderen Fahrzeuge 200 bis 220 nahe beieinander liegen. Jedoch stimmt die Geschwindigkeitskomponente, in der Fahrtrichtung des Ausgangsfahrzeugs 100, des Fahrzeugs 200, das durch das Ausgangsfahrzeug 100 gefolgt werden sollte, mit der Ist-Geschwindigkeit V3 des Fahrzeugs 200 überein, und stimmt daher im Wesentlichen mit der durch die Radarvorrichtung 41 bezogenen Geschwindigkeitskomponente überein. Daher kann das Fahrzeug 200 zuverlässig als das Ziel-Führungsfahrzeug spezifiziert werden, anstatt der Fahrzeuge 210 und 220, die versuchen, auf die Fahrspur einzufahren, und anstatt der Fahrzeuge 230 bis 270, die sich weiter weg von dem Ausgangsfahrzeug 100 befinden.
-
In der vorstehenden Beschreibung wird eine Radarvorrichtung als ein Frontsensor verwendet. Jedoch können ein Infrarotsensor oder ein Ultraschallsensor verwendet werden. Alternativ kann eine Frontkamera verwendet werden, um Bilder zu beziehen, aus denen Bilder von anderen Fahrzeugen durch eine Bildverarbeitung bezogen werden können, und die Distanz und Geschwindigkeit der anderen Fahrzeuge können basierend auf den bezogenen Bildern der anderen Fahrzeuge bestimmt werden.
-
Die Ziel-Führungsfahrzeug-Zuweisungsvorrichtung gemäß der vorliegenden Erfindung kann bei Steuerungen angewendet werden, die von einem Kollisionswarnsystem bzw. Pre-Crash-System durchgeführt werden, die eine Kollision mit einem Ziel-Führungsfahrzeug vorhersagen, um eine Kollision mit dem Ziel-Führungsfahrzeug zu vermeiden, und die die Kraft einer Kollision mit dem Ziel-Führungsfahrzeug reduziert, wenn eine solche Kollision auftritt.
-
Während die Erfindung mit Bezugnahme auf beispielhafte Ausführungsbeispiele davon beschrieben wurde, sollte es verstanden sein, dass die Erfindung nicht auf die beschriebenen Ausführungsbeispiele oder Konstruktionen beschränkt ist. Im Gegensatz dazu ist die Erfindung dazu gedacht, verschiedene Modifikationen und äquivalente Anordnungen abzudecken. Zusätzlich gilt, dass während die verschiedenen Elemente der beispielhaften Ausführungsbeispiele in verschiedenen Kombinationen und Konfigurationen gezeigt sind, liegen andere Kombinationen und Konfigurationen, umfassend mehr, weniger oder nur ein einzelnes Element, ebenso innerhalb des Umfangs der Erfindung.
-
ZITATE ENTHALTEN IN DER BESCHREIBUNG
-
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.
-
Zitierte Patentliteratur
-
- JP 2005-115637 A [0002, 0003]