JP6597415B2 - 情報処理装置及びプログラム - Google Patents
情報処理装置及びプログラム Download PDFInfo
- Publication number
- JP6597415B2 JP6597415B2 JP2016043469A JP2016043469A JP6597415B2 JP 6597415 B2 JP6597415 B2 JP 6597415B2 JP 2016043469 A JP2016043469 A JP 2016043469A JP 2016043469 A JP2016043469 A JP 2016043469A JP 6597415 B2 JP6597415 B2 JP 6597415B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- image
- speed
- state
- displays
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000010365 information processing Effects 0.000 title claims description 13
- 230000002093 peripheral effect Effects 0.000 claims description 63
- 238000001514 detection method Methods 0.000 claims description 13
- 230000006870 function Effects 0.000 claims description 11
- 230000005540 biological transmission Effects 0.000 description 28
- 238000000034 method Methods 0.000 description 21
- 240000004050 Pentaglottis sempervirens Species 0.000 description 5
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 5
- 239000000470 constituent Substances 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000002194 synthesizing effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000000994 depressogenic effect Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images





Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
- B60R1/27—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view providing all-round vision, e.g. using omnidirectional cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/28—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with an adjustable field of view
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—3D [Three Dimensional] image rendering
- G06T15/10—Geometric effects
- G06T15/20—Perspective computation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/105—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using multiple cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/303—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing using joined images, e.g. multiple camera images
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/60—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective
- B60R2300/602—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective with an adjustable viewpoint
- B60R2300/605—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective with an adjustable viewpoint the adjustment being automatic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/60—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective
- B60R2300/607—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective from a bird's eye viewpoint
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/70—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by an event-triggered choice to display a specific image among a selection of captured images
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/802—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for monitoring and displaying vehicle exterior blind spot views
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/806—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for aiding parking
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Signal Processing (AREA)
- General Physics & Mathematics (AREA)
- Computing Systems (AREA)
- Computer Graphics (AREA)
- Automation & Control Theory (AREA)
- Mathematical Physics (AREA)
- Transportation (AREA)
- Geometry (AREA)
- Closed-Circuit Television Systems (AREA)
Description
本発明は、車両周辺の適切な範囲を示す画像を表示する技術を提供することを目的とする。
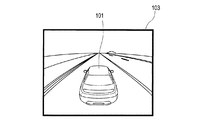
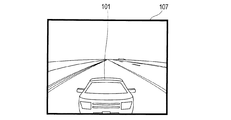
状態判定部は、車両の走行駆動源による駆動力の出力方向を制御する制御ユニットによる制御状態を判定する。速度検出部は、車両の走行速度を検出する。また表示制御部は、車両の周囲を撮影する1つ以上のカメラ(3a、3b、3c、3d)により撮影された画像に基づく上記車両の周辺を示す画像であって、それぞれ少なくとも視点及び表示範囲のいずれか一方が異なる画像である複数の周辺画像(103、105、107、109)の中から、1つ以上の周辺画像を表示装置(5)に表示させる。
なお、この欄及び特許請求の範囲に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本発明の技術的範囲を限定するものではない。
[1.実施形態]
[1−1.構成]
画像表示システム1は自動車等の車両に搭載されて用いられるシステムであって、図1に示すように、車両に搭載される4つのカメラである前カメラ3a,後カメラ3b,左カメラ3c,及び右カメラ3dと、表示装置5と、Electronic Control Unit(以下、ECU)7と、を備えている。以下の説明において、上記4つのカメラ全てを指すときには単にカメラ3と記載する。なおECU7が、情報処理装置に相当する。
ECU7は、カメラ入力信号処理部11、記憶装置13、車両情報入力信号処理部15、出力信号処理部17、画像処理部19を有する。
記憶装置13は、情報を記憶可能な記憶領域を構成する装置である。記憶装置13が構成する記憶領域には、カメラ3それぞれの設置される位置や角度などのパラメータが記憶されており、画像処理部19によって必要なときに読み出される。
出力信号処理部17は、画像処理部19から出力された画像データのデジタル信号をアナログ信号に変換し、表示装置5に出力する。表示装置5は、受信した信号に基づいて画像を表示する。
トランスミッション33の制御状態とは、車両の走行駆動源であるエンジンによる駆動力の出力方向の制御の状態である。
画像生成部27は、1つ以上のカメラ3により撮影された画像に基づいて、1つ以上のカメラ3それぞれにより撮影された撮影画像の視点とは異なる視点の1つ以上の画像を生成する。なお、その際には記憶装置13に記憶されているカメラ3のパラメータが用いられる。
[1−2.周辺画像]
周辺画像は、車両の周辺を示す画像であり、車両の周囲を撮影するカメラ3により撮影された画像に基づいて画像生成部27により生成された画像である。画像生成部27は、上述したように、4つのカメラ3の視点とは異なる視点の画像を生成する。画像生成部27にて生成された画像は、それぞれ周辺画像である。
この前方俯瞰視点画像109では、搭乗者は車両の後方を中心として車両の周辺を広く確認することができ、また障害物や路面に表示された白線などと車両101との位置関係も容易に理解することができる。即ち前方俯瞰視点画像109は、例えば障害物や駐車枠の確認が必要となる後進時に好適な画像である。
次に、ECU7のCPU21が実行する画像表示処理について、図7のフローチャートを用いて説明する。本処理は、自車両のアクセサリスイッチがオンである間、繰り返し実行される。
以上詳述した実施形態によれば、以下の効果が得られる。
(1a)本実施形態の画像表示システム1では、セレクタ31の操作により設定されたシフトレンジと、車両の走行速度と、に基づいて、車両の走行状態に適した範囲を示す周辺画像が表示装置5に表示される。よって、車両の搭乗者は、その状況に応じた適切な画像を視認することができる。
以上、本発明を実施するための形態について説明したが、本発明は上述の実施形態に限定されることなく、種々変形して実施することができる。
(2b)上記実施形態では、状態判定部25が、エンジンを走行駆動源とする車両について、その駆動力の出力方向を制御する出力制御装置であるトランスミッションの状態を判定する構成を例示した。しかしながら、走行駆動源及び出力制御装置は、上記実施形態の構成に限定されない。例えば走行駆動源としてモーターを用いる構成であってもよい。
また、トランスミッションにおいて設定されているギヤ比と走行速度に応じた周辺画像を表示する構成としてもよい。
(2g)周辺画像の種類は上記実施形態に示したものに限定されず、また5種類以上であってもよい。例えば走行速度に応じて段階的に表示される周辺画像の視点や表示範囲が変化する構成であってもよい。
(2i)上記各実施形態における1つの構成要素が有する機能を複数の構成要素に分担させたり、複数の構成要素が有する機能を1つの構成要素に発揮させたりしてもよい。また、複数の構成要素が有する複数の機能を、1つの構成要素によって実現したり、複数の構成要素によって実現される1つの機能を、1つの構成要素によって実現したりしてもよい。また、上記実施形態の構成の一部を省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加又は置換してもよい。なお、特許請求の範囲に記載した文言のみによって特定される技術思想に含まれるあらゆる態様が本発明の実施形態である。
Claims (8)
- 車両の駆動力の出力方向を制御する出力制御装置(33)による制御状態を判定する状態判定部(25)と、
前記車両の走行速度を検出する速度検出部(26)と、
前記車両の周囲を撮影する1つ以上のカメラ(3a、3b、3c、3d)により撮影された画像に基づく前記車両の周辺を示す画像であって、それぞれ少なくとも視点及び表示範囲のいずれか一方が異なる画像である複数の周辺画像(103、105、107、109)の中から、1つ以上の前記周辺画像を表示装置(5)に表示させる表示制御部(28)と、を備え、
前記表示制御部は、前記状態判定部により判定される前記制御状態が、前記車両を前方に進行させるように駆動力を伝える状態である場合において、前記速度検出部が検出する速度が所定の速度以下であるときは、前記車両の前端の上方の視点から下方を見下ろしたときに視認される領域を表示する前記周辺画像を前記表示装置に表示させ、前記速度検出部が検出する速度が前記所定の速度を超えるときは、前記車両の後方及び側方を表示する前記周辺画像を前記表示装置に表示させ、さらに、前記状態判定部により判定される前記制御状態が、前記車両を後方に進行させるように駆動力を伝える状態である場合には、前記車両の前方から後方を見たときに視認される領域を表示する画像であって、前記車両の後方と共に前記車両を表示する前記周辺画像を前記表示装置に表示させる、情報処理装置(7)。 - 車両の駆動力の出力方向を制御する出力制御装置(33)による制御状態を判定する状態判定部(25)と、
前記車両の走行速度を検出する速度検出部(26)と、
前記車両の周囲を撮影する1つ以上のカメラ(3a、3b、3c、3d)により撮影された画像に基づく前記車両の周辺を示す画像であって、それぞれ少なくとも視点及び表示範囲のいずれか一方が異なる画像である複数の周辺画像(103、105、107、109)の中から、1つ以上の前記周辺画像を表示装置(5)に表示させる表示制御部(28)と、を備え、
前記表示制御部は、前記状態判定部により判定される前記制御状態が、前記車両を前方に進行させるように駆動力を伝える状態である場合において、前記速度検出部が検出する速度が所定の速度以下であるときは、前記車両の前方の路面であって前記車両の運転者から死角となる領域を表示する前記周辺画像を前記表示装置に表示させ、前記速度検出部が検出する速度が前記所定の速度を超えるときは、前記車両の前方から後方を見たときに視認される領域を表示する画像であって、前記車両の後方及び側方と共に前記車両を表示する前記周辺画像を前記表示装置に表示させる、情報処理装置(7)。 - 請求項1又は請求項2に記載の情報処理装置であって、
前記状態判定部は、前記車両の備えるセレクタ(31)により選択されるシフトレンジに基づいて前記制御状態を判定する、情報処理装置。 - 請求項1から請求項3のいずれか1項に記載の情報処理装置であって、
さらに、前記1つ以上のカメラにより撮影された画像に基づいて、該画像とは少なくとも視点及び表示範囲のいずれか一方が異なる1つ以上の画像を生成する画像生成部(27)を備え、
前記複数の周辺画像は、前記画像生成部により生成された画像を含む、情報処理装置。 - 請求項1から請求項4のいずれか1項に記載の情報処理装置であって、
前記表示制御部は、前記状態判定部により判定される前記制御状態が、前記駆動力の伝達を行わない状態である場合と、前記車両を前方又は後方に進行させるように駆動力を伝える状態である場合と、において、異なる視点の前記周辺画像を前記表示装置に表示させる、情報処理装置。 - 請求項1から請求項5のいずれか1項に記載の情報処理装置であって、
前記表示制御部は、前記状態判定部により判定される前記制御状態が、前記車両を後方に進行させるように動力を伝える状態である場合と、それ以外の状態である場合と、において、異なる視点の前記周辺画像を前記表示装置に表示させる、情報処理装置。 - コンピュータを、
車両の駆動力の出力方向を制御する出力制御装置(33)による制御状態を判定する状態判定部(25)と、
前記車両の走行速度を検出する速度検出部(26)と、
前記車両の周囲を撮影する1つ以上のカメラ(3a、3b、3c、3d)により撮影された画像に基づく前記車両の周辺を示す画像であって、それぞれ少なくとも視点及び表示範囲のいずれか一方が異なる画像である複数の周辺画像(103、105、107、109)の中から、1つ以上の前記周辺画像を表示装置(5)に表示させる表示制御部(28)として機能させるプログラムであって、
前記表示制御部は、前記状態判定部により判定される前記制御状態が、前記車両を前方に進行させるように駆動力を伝える状態である場合において、前記速度検出部が検出する速度が所定の速度以下であるときは、前記車両の前端の上方の視点から下方を見下ろしたときに視認される領域を表示する前記周辺画像を前記表示装置に表示させ、前記速度検出部が検出する速度が前記所定の速度を超えるときは、前記車両の後方及び側方を表示する前記周辺画像を前記表示装置に表示させ、さらに、前記状態判定部により判定される前記制御状態が、前記車両を後方に進行させるように駆動力を伝える状態である場合には、前記車両の前方から後方を見たときに視認される領域を表示する画像であって、前記車両の後方と共に前記車両を表示する前記周辺画像を前記表示装置に表示させる、プログラム。 - コンピュータを、
車両の駆動力の出力方向を制御する出力制御装置(33)による制御状態を判定する状態判定部(25)と、
前記車両の走行速度を検出する速度検出部(26)と、
前記車両の周囲を撮影する1つ以上のカメラ(3a、3b、3c、3d)により撮影された画像に基づく前記車両の周辺を示す画像であって、それぞれ少なくとも視点及び表示範囲のいずれか一方が異なる画像である複数の周辺画像(103、105、107、109)の中から、1つ以上の前記周辺画像を表示装置(5)に表示させる表示制御部(28)として機能させるプログラムであって、
前記表示制御部は、前記状態判定部により判定される前記制御状態が、前記車両を前方に進行させるように駆動力を伝える状態である場合において、前記速度検出部が検出する速度が所定の速度以下であるときは、前記車両の前方の路面であって前記車両の運転者から死角となる領域を表示する前記周辺画像を前記表示装置に表示させ、前記速度検出部が検出する速度が前記所定の速度を超えるときは、前記車両の前方から後方を見たときに視認される領域を表示する画像であって、前記車両の後方及び側方と共に前記車両を表示する前記周辺画像を前記表示装置に表示させる、プログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016043469A JP6597415B2 (ja) | 2016-03-07 | 2016-03-07 | 情報処理装置及びプログラム |
| DE112017001178.7T DE112017001178T5 (de) | 2016-03-07 | 2017-03-06 | Informationsverarbeitungsvorrichtung und -programm |
| US16/082,395 US10706292B2 (en) | 2016-03-07 | 2017-03-06 | Information processing apparatus and program |
| CN201780015616.8A CN108702491A (zh) | 2016-03-07 | 2017-03-06 | 信息处理装置以及程序 |
| PCT/JP2017/008771 WO2017154833A1 (ja) | 2016-03-07 | 2017-03-06 | 情報処理装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016043469A JP6597415B2 (ja) | 2016-03-07 | 2016-03-07 | 情報処理装置及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017163206A JP2017163206A (ja) | 2017-09-14 |
| JP2017163206A5 JP2017163206A5 (ja) | 2018-06-21 |
| JP6597415B2 true JP6597415B2 (ja) | 2019-10-30 |
Family
ID=59790218
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016043469A Active JP6597415B2 (ja) | 2016-03-07 | 2016-03-07 | 情報処理装置及びプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10706292B2 (ja) |
| JP (1) | JP6597415B2 (ja) |
| CN (1) | CN108702491A (ja) |
| DE (1) | DE112017001178T5 (ja) |
| WO (1) | WO2017154833A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3071333B1 (fr) * | 2017-09-15 | 2021-06-11 | Renault Sas | Procede d’affichage sur un ecran d’un environnement d’un vehicule automobile, et vehicule automobile dans lequel un tel procede est mis en œuvre |
| US20200349367A1 (en) * | 2018-01-19 | 2020-11-05 | Sony Corporation | Image processing device, image processing method, and program |
| JP6745316B2 (ja) | 2018-09-28 | 2020-08-26 | 本田技研工業株式会社 | 車両用情報表示装置 |
| JP7160701B2 (ja) * | 2019-01-23 | 2022-10-25 | 株式会社小松製作所 | 作業機械のシステム及び方法 |
| JP7065068B2 (ja) * | 2019-12-13 | 2022-05-11 | 本田技研工業株式会社 | 車両周囲監視装置、車両、車両周囲監視方法およびプログラム |
| JP7429865B2 (ja) | 2020-05-28 | 2024-02-09 | パナソニックIpマネジメント株式会社 | 表示制御装置、車両及び表示制御方法 |
| JP7398637B2 (ja) * | 2020-05-28 | 2023-12-15 | パナソニックIpマネジメント株式会社 | 表示制御装置、車両及び表示制御方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03286306A (ja) | 1990-04-03 | 1991-12-17 | Mitsubishi Electric Corp | 数値制御装置 |
| EP2309453A3 (en) | 1998-07-31 | 2012-09-26 | Panasonic Corporation | Image displaying apparatus and image displaying method |
| JP3803021B2 (ja) * | 2000-10-02 | 2006-08-02 | 松下電器産業株式会社 | 運転支援装置 |
| US7995095B2 (en) * | 2001-10-18 | 2011-08-09 | Autoliv Development Ab | Night vision device for a vehicle |
| EP1504276B1 (en) * | 2002-05-03 | 2012-08-08 | Donnelly Corporation | Object detection system for vehicle |
| US8564079B2 (en) * | 2008-04-21 | 2013-10-22 | Qualcomm Incorporated | STT MRAM magnetic tunnel junction architecture and integration |
| US8564657B2 (en) * | 2009-05-29 | 2013-10-22 | Honda Research Institute Europe Gmbh | Object motion detection system based on combining 3D warping techniques and a proper object motion detection |
| JP5412979B2 (ja) * | 2009-06-19 | 2014-02-12 | コニカミノルタ株式会社 | 周辺表示装置 |
| JP2011091527A (ja) * | 2009-10-21 | 2011-05-06 | Panasonic Corp | 映像変換装置及び撮像装置 |
| JP5152244B2 (ja) * | 2010-04-06 | 2013-02-27 | トヨタ自動車株式会社 | 追従対象車特定装置 |
| DE112010005670B4 (de) * | 2010-06-18 | 2015-11-12 | Mitsubishi Electric Corporation | Fahrunterstützungsvorrichtung, Fahrunterstützungssystem und Fahrunterstützungs-Kameraeinheit |
| JP5206752B2 (ja) * | 2010-08-30 | 2013-06-12 | 株式会社デンソー | 走行環境認識装置 |
| JP2012195793A (ja) * | 2011-03-17 | 2012-10-11 | Clarion Co Ltd | 車両周辺監視装置 |
| JP5669791B2 (ja) * | 2012-08-07 | 2015-02-18 | 本田技研工業株式会社 | 移動体の周辺画像表示装置 |
-
2016
- 2016-03-07 JP JP2016043469A patent/JP6597415B2/ja active Active
-
2017
- 2017-03-06 US US16/082,395 patent/US10706292B2/en active Active
- 2017-03-06 CN CN201780015616.8A patent/CN108702491A/zh not_active Withdrawn
- 2017-03-06 DE DE112017001178.7T patent/DE112017001178T5/de active Pending
- 2017-03-06 WO PCT/JP2017/008771 patent/WO2017154833A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| US10706292B2 (en) | 2020-07-07 |
| US20190087665A1 (en) | 2019-03-21 |
| WO2017154833A1 (ja) | 2017-09-14 |
| CN108702491A (zh) | 2018-10-23 |
| DE112017001178T5 (de) | 2018-11-15 |
| JP2017163206A (ja) | 2017-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6597415B2 (ja) | 情報処理装置及びプログラム | |
| KR101354068B1 (ko) | 차량주변화상생성장치 | |
| KR101266734B1 (ko) | 표시장치 | |
| JP5277272B2 (ja) | 車両後方監視装置 | |
| US9973734B2 (en) | Vehicle circumference monitoring apparatus | |
| JP6477562B2 (ja) | 情報処理装置 | |
| US20200082185A1 (en) | Periphery monitoring device | |
| WO2014068856A1 (ja) | 画像生成装置、および画像生成プログラム製品 | |
| JP7151293B2 (ja) | 車両周辺表示装置 | |
| US20100134264A1 (en) | Vehicle surrounding confirmation apparatus | |
| US20170259831A1 (en) | Driving assistance device and driving assistance system | |
| JP6524922B2 (ja) | 運転支援装置、運転支援方法 | |
| JP2018144526A (ja) | 周辺監視装置 | |
| CN110997409B (zh) | 周边监控装置 | |
| JP2007221200A (ja) | 車両周辺監視装置 | |
| JP7091624B2 (ja) | 画像処理装置 | |
| JP6876236B2 (ja) | 表示制御装置 | |
| JP2005186648A (ja) | 車両用周囲視認装置および表示制御装置 | |
| JP2018063294A (ja) | 表示制御装置 | |
| CN111095921A (zh) | 显示控制装置 | |
| JP7013751B2 (ja) | 画像処理装置 | |
| JP7000383B2 (ja) | 画像処理装置および画像処理方法 | |
| US11669230B2 (en) | Display control device | |
| CN110895443A (zh) | 显示控制装置 | |
| CN110877574A (zh) | 显示控制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180509 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180514 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190514 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190712 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190916 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6597415 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |