CN1966333A - 动力转向装置 - Google Patents
动力转向装置 Download PDFInfo
- Publication number
- CN1966333A CN1966333A CNA2006101493779A CN200610149377A CN1966333A CN 1966333 A CN1966333 A CN 1966333A CN A2006101493779 A CNA2006101493779 A CN A2006101493779A CN 200610149377 A CN200610149377 A CN 200610149377A CN 1966333 A CN1966333 A CN 1966333A
- Authority
- CN
- China
- Prior art keywords
- rudder
- operating
- wheel
- power steering
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims description 17
- 230000004913 activation Effects 0.000 claims description 12
- 239000012530 fluid Substances 0.000 claims description 12
- 230000008520 organization Effects 0.000 claims 2
- 230000002441 reversible effect Effects 0.000 abstract description 5
- 238000000034 method Methods 0.000 description 16
- 230000003042 antagnostic effect Effects 0.000 description 12
- 238000010586 diagram Methods 0.000 description 9
- 230000000694 effects Effects 0.000 description 3
- 239000002828 fuel tank Substances 0.000 description 3
- 238000007514 turning Methods 0.000 description 3
- 241000380131 Ammophila arenaria Species 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 101000802894 Dendroaspis angusticeps Fasciculin-2 Proteins 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000008676 import Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000008092 positive effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D11/00—Steering non-deflectable wheels; Steering endless tracks or the like
- B62D11/24—Endless track steering specially adapted for vehicles having both steerable wheels and endless track
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18063—Creeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Non-Deflectable Wheels, Steering Of Trailers, Or Other Steering (AREA)
- Power Steering Mechanism (AREA)
Abstract
提供一种动力转向装置,其谋求降低车辆停止时的掌舵转矩。在车辆的停止状态下,在驾驶员操纵方向盘时,对左后轮和右后轮施加正负相反的驱动转矩,产生使车辆调头的力矩,并产生用于操纵方向盘的辅助转矩。
Description
技术领域
本发明涉及辅助车轮的掌舵力的动力转向装置,尤其涉及对于在车辆停止时对方向盘进行掌舵的情况下的减轻掌舵转矩具有效果的车轮后轮的驱动方法。
背景技术
作为对应于来自驾驶员的掌舵转矩输入而对车轮掌舵的力进行辅助的动力辅助(power assist)装置一般使用液压机构。该现有技术的例子是,利用电动马达驱动油泵(oil pump)使其产生油压,通过对从方向盘输入的掌舵转矩进行反馈来控制产生的油压,从而产生掌舵辅助力(例如,参照专利文献1)。
另外,不使用液压机构、而只利用电动马达来辅助掌舵的电动动力转向装置,也以小型车为中心开始普及(例如,参照专利文献2)。
进而,还有一种公知技术是关于一种混合的电动油压动力转向装置,该装置通过利用能够在两方向上喷出工作油的油泵,在需要(on-demand)时驱动马达,由此可以实现节省能源和节省空间(例如,参照专利文献3)。
一般地,公知的是:车辆在停止状态下对方向盘进行掌舵时的掌舵力比车辆行驶的状态时的要大。因此,动力转向装置应当产生的最大辅助力是根据车辆停止时所必须的掌舵辅助力来规定的(例如,参照非专利文献1)。
专利文献1:日本特开2003-212141号公报
专利文献2:日本特开平8-295257号公报
专利文献3:日本特开2000-168604号公报
非专利文献1:萱场工业株式会社编、《汽车的掌舵系统与操作安全性》、山海堂、p.213
在上述现有技术中,未必充分地考虑了如下述这样的、用于降低车辆停止时的驾驶员的掌舵转矩的方法。
以具体的运行状况,如车辆入库为例。在使车辆后退入库时,一般的是驾驶员踏着制动器踏板(brake pedal),一边确认后方一边操纵方向盘。驾驶员操纵方向盘,根据车辆能够到达的目标位置,直到成为用于画出转弯半径的轮胎切角。此时,若不能从动力转向装置得到充分的辅助,则将增大掌舵的负担。
一般地说,为了产生大的掌舵辅助力,为了使作为动力转向装置的构成要素的油泵和电动马达等大容量化且大输出化,不可回避地增大尺寸和重量,从而存在向车辆上搭载时的搭载性恶化的问题。进而,车辆停止时的掌舵辅助力的产生机构只依存于动力转向装置,而后轮只能由制动器的力来使其停止,对辅助掌舵没有积极的作用。
发明内容
本发明的目的是在车辆停止的状态下减轻掌舵方向盘时的掌舵转矩。
为了达到所述目的,在车辆停止的状态下,在驾驶员操纵方向盘时,通过对左后轮和右后轮施加正负相反的驱动转矩,产生使车辆调头的力矩,产生用于操纵方向盘的辅助转矩。
因此,利用检测车辆的停止状态的机构,在检测出车辆已停止的状态时,在从驾驶员一侧观察到绕顺时针方向操纵方向盘的情况下,对右后轮施加使车辆后退的方向的驱动转矩,对左后轮施加使车辆前进的方向的驱动转矩。另一方面,在从驾驶员一侧观察到绕逆时针方向操纵方向盘的情况下,对右后轮施加使车辆前进的方向的驱动转矩,对左后轮施加使车辆后退的方向的驱动转矩。
此时,施加于左后轮和右后轮的驱动转矩,可以是其绝对值相等但正负相反。
另外,在从驾驶员一侧观察到绕顺时针方向操纵方向盘的情况下,可以对右后轮施加使车辆后退的方向的驱动转矩,对左后轮施加制动力。另一方面,在从驾驶员一侧观察到绕逆时针方向操纵方向盘的情况下,可以对右后轮施加使车辆前进的方向的驱动转矩,对左后轮施加制动力。
进而,在从驾驶员一侧观察到绕顺时针方向操纵方向盘的情况下,可以对右后轮施加制动力,对左后轮施加使车辆前进的方向的驱动转矩。另一方面,在从驾驶员一侧观察到绕逆时针方向操纵方向盘的情况下,可以对右后轮施加制动力,对左后轮施加使车辆后退的方向的驱动转矩。
根据本发明,在车辆停止的状态下操纵方向盘时,通过对车轮的左右后轮施加绝对值相等但正负相反的驱动转矩,可以产生使车辆调头的力矩,并产生用于操纵方向盘的辅助转矩,能够减轻在操纵方向盘时的掌舵转矩。
附图说明
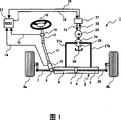
图1是本发明的第一实施例的动力转向装置的整体图;
图2是表示本发明的在车辆停止时产生掌舵辅助力的流程的框图;
图3是示意地表示本发明的车辆的侧视图;
图4是表示本发明的车辆、车轮及方向盘的位置关系模式的示意图;
图5是表示本发明的车辆30因对后轮施加的驱动转矩负载而调头的状态的图;
图6是表示本发明的、从掌舵转矩检测值计算出动力转向装置产生的掌舵力、和根据本发明的后轮驱动的掌舵辅助力的流程的图;
图7是表示本发明的施加于单侧后轮的驱动转矩对掌舵进行辅助的比率的简易计算的结果;
图8是本发明的在对后轮施加了正负相反的驱动转矩时的、简易地模拟了前轮的切角的结果;
图9是本发明的其它实施例中的动力转向装置的整体图;
图10是本发明的其它实施例中的动力转向装置的整体图;
图11是本发明的其它实施例中的、用于产生掌舵辅助力的流程的概要图;
图12是表示本发明的其它实施例中的、在考虑了动力转向油(powersteering oil)的温度变化时的、计算出动力转向装置产生的掌舵力和根据本发明的后轮驱动的掌舵辅助力的流程的图;
图13是表示本发明的其它实施例中的温度补偿增益G4的一个例子的坐标图;
图14是表示本发明的其它实施例中的、在车辆转弯行驶时动力转向装置产生故障情况下的、后轮掌舵辅助的流程的图;
图15是表示本发明的其它实施例中的、在车辆转弯行驶时动力转向装置产生故障情况下的、只通过制动器控制来进行后轮掌舵辅助的流程的图。
符号说明:
1-动力转向装置;2-油压动力汽缸;3-油压室;4-汽缸部;5-活塞;6-油压室;7-齿条;8a-左前轮;8b-右前轮;9-小齿轮;10-掌舵转矩传感器;11-输出轴;12-转向轴;13-舵角传感器;14-掌舵转矩信号线;15-舵角信号线;16-方向盘;17-动力转向装置控制单元;18-指令值信号线;19-马达旋转速度信号线;20-电动马达;21-马达驱动器;22-马达旋转速度·电枢电流信号线;23-驱动器输出电缆;24-可逆式泵;25-供给路;26-油箱;27a-油压配管;27b-油压配管;28-活塞杆;30-车辆;31a-左后轮;31b-右后轮;32-路面;34a-左后轮传动装置;34b-右后轮传动装置;100-动力转向装置;101-舵角信号线;102-反作用力指令值信号线;103-掌舵转矩信号线;104-掌舵转矩传感器;105-掌舵反作用力生成单元。
具体实施方式
参照图1至图8说明本发明的一个实施例。动力转向装置1检测到来自驾驶员的掌舵转矩输入,控制单元17计算辅助力指令值,驱动电动马达20并掌舵前车轮8a、8b。
掌舵输入机构由以下部分构成,它们是:方向盘16;配合于方向盘16来传递掌舵转矩的转向轴12和输出轴11;设置于转向轴12的舵角传感器13;设置于输出轴11的小齿轮9和检测掌舵转矩的掌舵转矩传感器10;以及连结于小齿轮9的齿条7。
产生辅助力的油压动力汽缸2,在车体宽度方向上延伸设置的汽缸4内贯通有连结于齿条7的活塞杆28,在活塞杆28上固定有在汽缸4内滑动的活塞5。在汽缸4内通过活塞5而形成有左右的油压室3和油压室6。车轮8a经由齿条7与活塞杆28的端部连接,车轮8b经由连杆与活塞杆28的端部连接。
产生油压并能够正逆旋转的可逆式泵24连接着油压配管27a、27b,该油压配管27a、27b分别连接油压室6和油压室3,并且可逆式泵24通过供给路25与储藏工作油的油箱26连接。油箱26回收从可逆式泵24泄漏出来的工作油。可逆式泵24的旋转轴,配合于电动马达20,接收来自马达驱动器21的指令电流,并通过旋转来能够正逆旋转地驱动电动马达20。
动力转向装置控制单元17分别通过掌舵转矩信号线14与转矩传感器10连接;通过舵角信号线15与舵角传感器13连接;通过指令值信号线18和马达旋转速度信号线19与马达驱动器21连接。在动力转向装置控制单元17中,以驾驶员操作方向盘16而输入的掌舵转矩为基础,计算出对电动马达20的指令值。生成的指令值通过指令值信号线18传递给马达驱动器21,进而通过驱动器输出电缆23输入给电动马达20。
接下来参照图2,简要说明在车辆停止时用于产生掌舵辅助力的流程。
在车辆停止的状态下(步骤S101),在步骤S102中,对是否进行基于后轮的掌舵辅助进行判断。在判定时,例如,可以在驾驶席设置掌舵辅助ON/OFF开关,驾驶员根据状况进行切换。
在步骤S102中,在判定了没有进行掌舵辅助时,只驱动动力转向装置1(步骤S107)。另一方面,在判定了进行掌舵辅助时,进入步骤S103,判定方向盘16是朝哪个方向掌舵的。在判定时,可以使用掌舵转矩传感器10。
首先,在掌舵转矩为0Nm时,判定没有操纵方向盘16(保舵),进入步骤S108,在驾驶员持续操作制动器期间,对左后轮和右后轮施加制动力。另一方面,在掌舵转矩为正(比0Nm大)或为负(比0Nm小)时,判定正在操纵方向盘16(原地打轮),进入步骤S104,解除左后轮和右后轮的止动。同时,在判定从驾驶员一侧观察到绕顺时针方向操纵方向盘16的情况下,进入步骤S105,进行基于后轮的掌舵辅助。
在步骤S105中,在瞬时间内对左后轮和右后轮施加绝对值相等但正负相反的驱动转矩。在此,可以对右后轮施加使车辆后退的方向的驱动转矩,对左后轮施加使车辆前进的方向的驱动转矩。另一方面,在判定从驾驶员一侧观察到绕逆时针方向操纵方向盘16的情况下,进入步骤S106。在步骤S106中,在瞬时间内对左后轮和右后轮施加绝对值相等但正负相反的驱动转矩。在此,可以对右后轮施加使车辆前进的方向的驱动转矩,对左后轮施加使车辆后退的方向的驱动转矩。
在判定方向盘的旋转方向时,可以使用以下的方法。在掌舵转矩传感器10检测出的掌舵转矩为正(比0Nm大)时,判断为方向盘顺时针旋转,为负(比0Nm小)时,方向盘逆时针旋转。另外,通过设定掌舵转矩传感器10,也可以使顺时针旋转/逆时针旋转的掌舵转矩的符号相反。
进而,可以使用舵角传感器13的信息来替代掌舵转矩传感器10。此时,舵角的微分值(舵角速度)是正(比0Nm大)时,判断为方向盘顺时针旋转,是负(比0Nm小)时,判断为方向盘逆时针旋转。另外,通过设定舵角传感器,也可以使顺时针旋转/逆时针旋转的掌舵转矩的符号相反。
另外,在步骤S104中,可以解除只是后轮的单侧的制动力。此时,在从驾驶员一侧观察到绕顺时针方向操纵方向盘16的情况下,只解除对右后轮的制动力,施加使车辆后退的方向的驱动转矩。或者,解除对左后轮的制动力,施加使车辆前进的方向的驱动转矩。另一方面,在从驾驶员一侧观察到绕逆时针方向操纵方向盘16的情况下,只解除对右后轮的制动力,施加使车辆前进的方向的驱动转矩。或者,可以只解除对左后轮的制动力,施加使车辆后退的方向的驱动转矩。
此外,作为解除制动力的方法,在液压式的制动器的情况下,可以使制动器压力减少。此时,可以使用能够独立控制左右的制动器压力的制动液压器控制装置。
为了解除基于后轮的掌舵辅助,对后轮施加制动力,例如,可以在驾驶席设置掌舵辅助ON/OFF开关,驾驶员将掌舵辅助切换为OFF。
接下来参照图3至图5,对基于后轮的驱动转矩的掌舵辅助的机械装置进行说明。图3示意地表示车辆30的侧视图。图4是示意地表示从箭头A观察所述车辆30时的车辆、车轮和方向盘的位置关系的图。
车辆30向着箭头(Front)所示方向前进。在车辆30设置有左前轮8a、右前轮8b、左后轮31a、右后轮31b,它们和路面32相接。
在此,说明在从车辆停止状态开始朝向θs方向操纵方向盘16时,驱动后轮来进行掌舵辅助的机械装置。此时,如图3所示,对左后轮31a施加有使车辆行进的方向的驱动转矩Tr,对右后轮31b施加有负的转矩-Tr。由于车轮是弹性体,所以虽然车轮的接地面是具有一定面积的区域,但在此为了简化,假定车轮与路面32以一点接触。此时,设左后轮31a和路面32的接点为Pra,设右后轮31b和路面32的接点为Prb。另外,由于驱动转矩Tr、-Tr的作用,将车轮受到的来自路面的反作用力、在点Pra的设为Fra、在点Prb的设为Frb。
在这里,Fra、Frb能够通过下面的式子表示。
Fra=-Frb=Tr/Rw (数1)
式中Rw为车轮的半径。由于这些Fra和Frb的作用,产生使车辆30调头的力矩Tv。车辆的旋转中心是车辆中心线Xv和后轮的旋转中心线Yr的交点Po,力矩Tv通过下面的式子求出。
Tv=2·Fra·Wr (数2)
式中Wr是左右后轮之间距离的二分之一的长度(轮距的二分之一的长度)。进而,为了与力矩Tv平衡,左前轮8a在与路面32的接点Pfa产生来自路面的反作用力Ffa,右前轮8b在与路面32的接点Pfb产生来自路面的反作用力Ffb。这里,Ffa、Ffb通过下面的式子求出。
Ffa=Ffb=Tv/(2·L1) (数3)
式中L1是车辆旋转中心Po和点Pfa之间的距离。
一般在车辆30的前轮部设置有被称为转向销(king pin)的部件,其承担着将来自动力转向装置1的掌舵力最终传递给前轮的任务。前轮以转向销为中心进行旋转运动。关于这些内容,例如在文献《汽车的运动与控制》(安部正人著,日本山海堂出版,PP.129-130)中有所记载。
若将设置于左右前轮的转向销的轴的延长线与路面32的接点分别设为Pka、Pkb,则在车辆的构造上,一般下面的关系式是成立的。即
L1<L2 (数4)
式中L2是车辆的旋转中心Po和Pka之间的距离(车辆的旋转中心Po和Pkb之间的距离也是相同的)。
图5是表示车辆30由于对后轮施加的驱动转矩而调头了的状态的图。根据上述的反作用力Ffa、Ffb与式(4)的关系,左前轮8a朝θta方向旋转,右前轮8b朝θtb方向旋转。由于这些车轮的旋转方向与方向盘θs的旋转方向一致,因此明显正在进行辅助掌舵。
图6是表示从掌舵转矩检测值计算出:动力转向装置产生的掌舵力、和根据本发明的后轮驱动的掌舵辅助力的流程的图。通过在检测出的掌舵转矩Ts(Nm)上乘以增益G1(框G01),求出必要的全掌舵力Ft(N),其中Ft是施加于齿条7的推力。接着,通过在全掌舵力Ft上乘以增益G2(框G02),求出动力转向装置应该产生的掌舵力Fp(N)。另一方面,通过在全掌舵力Ft上乘以增益G3(框G03),求出由于后轮驱动所需要辅助的掌舵力Fas(N)。在这里增益G2和G3之间的关系由下面的式子求出,即
G2+G3=1 (数5)
图7是表示在车辆停止时,施加于单侧后轮的驱动转矩对掌舵进行辅助的比率的简易计算的结果。在以作为齿条7的最大推力而具有8000N的能力的动力转向装置为对象时,若作为单侧后轮的驱动转矩而施加2600Nm的负载,那么能够产生相当于动力转向装置的50%的掌舵力。
图8是在从车辆停止状态对后轮施加了正负相反的驱动转矩时的、简易地模拟了前轮的切角的结果。模拟采用三次元机构解析软件,计算模型为单纯的刚体模型,而且把车体和四个车轮模型化。因此,从方向盘16没有输入掌舵转矩,只是通过来自后轮的掌舵辅助力来对前轮进行掌舵。若使施加于单侧后轮的驱动转矩增加,即100Nm、200Nm、300Nm、400Nm、500Nm,则能够确认前轮切角是逐渐变大的。
如果使用如上所述构成的本实施例的动力转向装置1,则通过在车辆停止时选择基于后轮的掌舵辅助功能,对左右后轮施加正负相反的驱动转矩,从而能够产生使车辆30调头的力矩,在以平衡于该力矩的方式而在左右前轮产生的来自路面32的反作用力的作用下,左右前轮绕转向销的左右接地点Pka、Pkb旋转。因此,能够减小动力转向装置1的最大输出,可以有助于省电力化。另外,由于还可以实现动力转向装置的小型化,所以能够提高搭载性,可适用于多种车型。
为了确认本实施例的实施情况,可以在车辆停止、且驾驶员操纵方向盘16的状况下,确认后轮的左右轮向反方向旋转。
接着,利用图9说明本发明的另外的实施例。在车辆30中,产生后轮的驱动转矩的机构是:配合于左后轮31a的旋转轴的左后轮传动装置34a;和配合于右后轮31b的旋转轴的右后轮传动装置34b。传动装置34a、34b可以为与左右轮31a、31b形成一体的轮内马达(wheel-in-motor)。进而也可以将传动装置34a、34b设置于前轮的左右。
接着,利用图10说明本发明的另外的实施例。在动力转向装置100中,掌舵输入机构由:方向盘16和配合于方向盘16来传递掌舵转矩的转向轴12以及掌舵反作用力生成单元105构成。
动力转向装置控制单元17不利用第一实施例的舵角传感器13、掌舵转矩传感器10,而是从掌舵反作用力生成单元105经由舵角信号线101检测出舵角,从掌舵转矩传感器104经由掌舵转矩信号线103检测出掌舵转矩,从而计算出对电动马达20的指令值。本实施例与第一实施例的不同点是:从方向盘16输入的掌舵力,不是直接被传递给小齿轮9,而是被机械地绝缘的线传转向系统(steer by wire system)。
在线传转向系统中,由于需要生成来自车轮8a、8b的掌舵反作用力,所以动力转向装置控制单元17生成掌舵反作用力,并经由反作用力指令信号线120,向掌舵反作用力生成单元105输入反作用力指令值。在本实施例中,由于不会将来自路面的助振力直接传递给方向盘16,所以有效地提高了掌舵感。至于其他的结构,由于和第一实施例的结构相同,所以省略说明。
为了确认本实施例实施的情况,与第一实施例相同地,在车辆停止、且驾驶员操纵方向盘16的状况下,确认后轮的左右轮向反方向旋转。
接着,利用图11说明本发明的其他的实施例。图11是在车辆停止时用于产生掌舵辅助力的流程的概要图。
在车辆停止了的状态(步骤S111)下,在步骤S112中,对是否进行基于后轮的掌舵辅助进行判断。在步骤S112中,在判定了没有进行掌舵辅助时,只驱动动力转向装置1(步骤S116)。另一方面,在判定了进行掌舵辅助时,进入步骤S113,判定方向盘16是朝哪个方向掌舵的。在判定时,可以使用掌舵转矩传感器10。
首先,在掌舵转矩为0Nm时,判定没有操纵方向盘16(保舵),进入步骤S117,在驾驶员持续操作制动器期间,对左右后轮施加制动力。另一方面,在掌舵转矩为正(比0Nm大)或为负(比0Nm小)时,判定正在操纵方向盘16(原地打轮),进入步骤S114或步骤S115。在此,进入步骤S114的条件是:从驾驶员一侧观察到绕顺时针方向操纵方向盘16的情况。
在步骤S114中,只解除右后轮的制动使车辆后退。或者,只解除左后轮的制动使车辆前进。另一方面,进入步骤S115的条件是:从驾驶员一侧观察到绕逆时针方向操纵方向盘16的情况。在步骤S115中,只解除左后轮的制动使车辆后退。或者,可以只解除右后轮的制动使车辆前进。
在本实施例中,通过解除左后轮和右后轮的任一方的制动力,能够进行基于后轮的掌舵辅助,由于没有必要独立地驱动左后轮和右后轮,所以对机器结构和控制性的简化是有效的。至于其他的结构,由于和第一实施例的结构相同,所以省略说明。
接下来利用图12和图13说明本发明的其他的实施例。图12是表示在考虑了动力转向油的温度变化时的、计算出动力转向装置产生的掌舵力和根据本发明的后轮驱动的掌舵辅助力的流程的图。
在本实施例中,为了进行动力转向油的温度补偿,在第一实施例中附加温度补偿增益G4(框G04)。通过在必要的全掌舵力Ft(N)上乘以增益G3(框G03),进而乘以温度补偿增益G4(框G04),从而求出由后轮驱动需要辅助的掌舵力Fas2(N)。
图13是表示温度补偿增益G4的一个例子的坐标图。坐标图的横轴表示动力转向油的温度,左侧纵轴是将动力转向油的动粘度在常温时(20℃)值作为1而将其无量纲化了的值(用线A标绘),右侧纵轴是温度补偿增益G4(用线B标绘)。温度越低,动粘度变得越大,从而引起在动力转向装置的泵部或配管等的摩擦损失增大。因此,为了补偿因摩擦损失而造成的掌舵力下降,可以如线B那样设定温度补偿增益G4。在本实施例中,由于即使在动力转向油的温度低的情况下,也能够得到与常温时一样的掌舵力,所以对于减轻掌舵的不协调感是有效的。由于其他的结构与第一实施例的结构相同,所以省略说明。
接着,利用图14和图15说明本发明的其他的实施例。图14是表示在车辆转弯行驶时动力转向装置产生故障情况下的、后轮掌舵辅助的流程的图。
车辆在转弯行驶中检测到动力转向装置的故障的情况下(S131),在从驾驶员一侧观察到绕顺时针方向操纵方向盘16时,进入步骤S132,对左后轮和右后轮施加绝对值相等但正负相反的驱动转矩。在此,可以对右后轮施加使车辆后退的方向的驱动转矩,对左后轮施加使车辆前进的方向的驱动转矩。另一方面,在从驾驶员一侧观察到绕逆时针方向操纵方向盘16的情况下,进入步骤S133。在步骤S133中,对左后轮和右后轮施加绝对值相等但正负相反的驱动转矩。在此,可以对右后轮施加使车辆前进的方向的驱动转矩,对左后轮施加使车辆后退的方向的驱动转矩。
图15是表示在车辆转弯行驶时动力转向装置产生故障情况下的、只通过制动器控制来进行后轮掌舵辅助的流程的图。车辆在转弯行驶中检测到动力转向装置的故障的情况下(S141),可以在从驾驶员一侧观察到绕顺时针方向操纵方向盘16时,进入步骤S142,只对右后轮施加制动力。另一方面,可以在从驾驶员一侧观察到绕逆时针方向操纵方向盘16时,进入步骤S143,只对左后轮施加制动力。在本实施例中,即使在交叉点或转弯处等动力转向装置产生了故障的情况下,也能够对掌舵进行辅助,可有效地确保安全性。由于其他的结构与第一实施例的结构相同,所以省略说明。
在上述的各实施例中,作为后轮制动力控制装置,可以在左后轮和右后轮上具备控制:左后轮用制动器传动装置(没有图示)、右后轮用制动器传动装置(没有图示)和各制动器传动装置的控制器,使得能够独立地控制各轮的制动力。这样的制动器传动装置可以利用液压或电磁传动装置或电动马达来构成。在使用液压时,可以具备:液压泵、驱动该液压泵的电动马达、以及利用液压泵产生的液压来对后轮施加制动力的制动器机构。
Claims (21)
1.一种动力转向装置,其特征在于,
具有:
掌舵传动装置,其对根据驾驶员的掌舵状态而转舵的前轮施加掌舵辅助力;
掌舵状态检测机构,其检测驾驶员的掌舵状态;
后轮侧传动装置,其对左右后轮施加驱动转矩;以及
后轮传动装置控制机构,其驱动控制所述后轮侧传动装置,使得在车辆停止状态下,根据掌舵状态对左右后轮分别产生正负相反的驱动转矩,或者在一个轮上产生驱动转矩、而在另外一个轮上产生制动力。
2.根据权利要求1所述的动力转向装置,其特征在于,
所述后轮传动装置控制机构,在所述掌舵状态检测机构检测出右侧方向的掌舵状态时,驱动控制所述后轮传动装置,使得在右侧后轮产生使车辆后退的方向的驱动转矩,并且驱动控制所述后轮传动装置,使得在左侧后轮产生使车辆前进的方向的驱动转矩;
在所述掌舵状态检测机构检测出左侧方向的掌舵状态时,驱动控制所述后轮传动装置,使得在右侧后轮产生使车辆前进的方向的驱动转矩,并且驱动控制所述后轮传动装置,使得在左侧后轮产生使车辆后退的方向的驱动转矩。
3.根据权利要求1或2所述的动力转向装置,其特征在于,
所述后轮传动装置,对所述左右后轮施加绝对值相等并且正负相反的驱动转矩。
4.根据权利要求1所述的动力转向装置,其特征在于,
在所述掌舵状态检测机构检测出右侧方向的掌舵状态时,驱动控制所述后轮传动装置,使得在右侧后轮产生使车辆后退的方向的驱动转矩,并且制动控制左侧后轮;
在所述掌舵状态检测机构检测出左侧方向的掌舵状态时,驱动控制所述后轮传动装置,使得在右侧后轮产生使车辆前进的方向的驱动转矩,并且制动控制左侧后轮。
5.根据权利要求1所述的动力转向装置,其特征在于,
在所述掌舵状态检测机构检测出右侧方向的掌舵状态时,制动控制右侧后轮,并且驱动控制所述后轮传动装置,使得在左侧后轮产生使车辆前进的方向的驱动转矩;
在所述掌舵状态检测机构检测出左侧方向的掌舵状态时,制动控制右侧后轮,并且驱动控制所述后轮传动装置,使得在左侧后轮产生使车辆后退的方向的驱动转矩。
6.根据权利要求1所述的动力转向装置,其特征在于,
在所述掌舵状态检测机构检测出右侧方向的掌舵状态时,制动控制右侧后轮,并且驱动控制所述后轮传动装置,使得在左侧后轮产生使车辆前进的方向的驱动转矩;
在所述掌舵状态检测机构检测出左侧方向的掌舵状态时,制动控制右侧后轮,并且驱动控制所述后轮传动装置,使得在左侧后轮产生使车辆后退的方向的驱动转矩。
7.根据权利要求1所述的动力转向装置,其特征在于,
在所述掌舵状态检测机构检测出右侧方向的掌舵状态时,制动控制右侧后轮,并且驱动控制所述后轮传动装置,使得在左侧后轮产生使车辆前进的方向的驱动转矩;
在所述掌舵状态检测机构检测出左侧方向的掌舵状态时,制动控制右侧后轮,并且驱动控制所述后轮传动装置,使得在左侧后轮产生使车辆后退的方向的驱动转矩。
8.根据权利要求1所述的动力转向装置,其特征在于,
还具有车辆停止状态判断机构,其判断车辆是否处于停止状态。
9.根据权利要求8所述的动力转向装置,其特征在于,
所述车辆停止状态判断机构,根据脚踏制动器的操作状态判断车辆的停止状态。
10.根据权利要求8所述的动力转向装置,其特征在于,
所述车辆停止状态判断机构,根据车速信息判断车辆的停止状态。
11.根据权利要求1所述的动力转向装置,其特征在于,
还具有失陷状态检测机构,其检测所述掌舵传动装置的失陷状态,
所述后轮传动装置控制机构,在所述失陷状态检测机构检测出所述掌舵传动装置的失陷状态时,增量修正所述后轮侧传动装置的驱动转矩。
12.根据权利要求1所述的动力转向装置,其特征在于,
所述掌舵传动装置是由油压动力汽缸、和选择性地对该油压动力汽缸的左右压力室供给油压的油压供给机构构成的,
还具有温度检测机构,其检测或推断所述掌舵传动装置的工作油的温度,
所述后轮传动装置控制机构,根据所述温度检测机构的温度控制所述后轮侧传动装置的驱动转矩。
13.根据权利要求12所述的动力转向装置,其特征在于,
所述后轮传动装置控制机构,在工作油的温度越低时,对所述后轮侧传动装置的驱动转矩进行的增量修正越大。
14.根据权利要求1所述的动力转向装置,其特征在于,
还具有转矩传感器,其检测驾驶员的掌舵转矩,
所述后轮传动装置控制机构,根据所述掌舵转矩控制所述后轮侧传动装置的驱动转矩。
15.根据权利要求14所述的动力转向装置,其特征在于,
所述后轮传动装置控制机构,在所述掌舵转矩越大时,对所述后轮侧传动装置的驱动转矩进行的增量修正越大。
16.根据权利要求1所述的动力转向装置,其特征在于,
还具有后轮制动力控制机构,其控制所述左右后轮的制动力,
该后轮制动力控制机构,在所述后轮侧传动装置产生了驱动转矩时,去除该左右后轮的制动力。
17.根据权利要求16所述的动力转向装置,其特征在于,
所述后轮制动力控制机构与脚踏制动器操作没有关系地产生制动力。
18.根据权利要求16所述的动力转向装置,其特征在于,
所述后轮制动力控制装置具有:油压泵;驱动该油压泵的电动马达;以及利用由所述油压泵产生的液压对后轮施加制动力的制动器机构。
19.根据权利要求16所述的动力转向装置,其特征在于,
所述后轮制动力控制装置是由对所述后轮施加制动力的电磁传动装置构成的。
20.根据权利要求1所述的动力转向装置,其特征在于,
所述后轮侧传动装置是在各个后轮设置的电动马达。
21.一种动力转向装置,其特征在于,
其具有:
掌舵传动装置,其对根据驾驶员的掌舵状态而转舵的前轮施加掌舵辅助力;
掌舵状态检测机构,其检测驾驶员的掌舵状态;
后轮侧传动装置,其对左右后轮施加驱动转矩;以及
后轮传动装置控制机构,其驱动控制所述后轮侧传动装置,使得在车辆停止状态下,根据掌舵状态对左右后轮分别产生不同的驱动转矩,
对左右后轮施加的驱动转矩的旋转中心在左右后轮轴上。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005331034A JP4812409B2 (ja) | 2005-11-16 | 2005-11-16 | パワーステアリング装置 |
| JP2005331034 | 2005-11-16 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1966333A true CN1966333A (zh) | 2007-05-23 |
| CN100534847C CN100534847C (zh) | 2009-09-02 |
Family
ID=38037943
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2006101493779A Expired - Fee Related CN100534847C (zh) | 2005-11-16 | 2006-11-16 | 动力转向装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7703561B2 (zh) |
| JP (1) | JP4812409B2 (zh) |
| CN (1) | CN100534847C (zh) |
| DE (1) | DE102006054159A1 (zh) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102498026A (zh) * | 2009-08-03 | 2012-06-13 | 丰田自动车株式会社 | 车辆的行驶辅助装置 |
| CN102858610A (zh) * | 2010-04-28 | 2013-01-02 | 日产自动车株式会社 | 车辆的转向时性能改进装置 |
| CN102963360A (zh) * | 2011-08-31 | 2013-03-13 | 本田技研工业株式会社 | 车辆的控制装置 |
| CN103253298A (zh) * | 2013-04-16 | 2013-08-21 | 中国电子科技集团公司第三十六研究所 | 电机驱动的液压助力转向泵 |
| CN104417549A (zh) * | 2013-08-20 | 2015-03-18 | 株式会社万都 | 控制主动后轮转向装置的方法 |
| CN104590369A (zh) * | 2014-12-30 | 2015-05-06 | 湖北工业大学 | 一种用于机耕船的联动式液压转向制动装置 |
| CN115107864A (zh) * | 2021-03-17 | 2022-09-27 | 丰田自动车株式会社 | 车辆用动力转向装置 |
| WO2023024631A1 (zh) * | 2021-08-26 | 2023-03-02 | 华为技术有限公司 | 车辆控制方法及装置、电子装置、计算机可读存储介质 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7648002B2 (en) * | 2007-06-08 | 2010-01-19 | Deere & Company | Vehicle with coordinated Ackerman and differential steering |
| KR100867698B1 (ko) * | 2007-07-18 | 2008-11-10 | 현대자동차주식회사 | 자동차의 스티어 바이 와이어 시스템 |
| JP2009196439A (ja) * | 2008-02-20 | 2009-09-03 | Denso Corp | パワーステアリング装置 |
| US8594888B2 (en) * | 2009-08-25 | 2013-11-26 | Toyota Jidosha Kabushiki Kaisha | Steering control apparatus |
| IT1396073B1 (it) * | 2009-10-01 | 2012-11-09 | Co Ge Car S N C Di Montano & Sanvido | Carrello di trasporto per impianti industriali |
| US8825297B2 (en) * | 2009-10-30 | 2014-09-02 | Toyota Jidosha Kabushiki Kaisha | Device for controlling vehicle travel |
| GB2464413B (en) * | 2010-01-05 | 2014-07-02 | Protean Electric Ltd | Control Device for a Vehicle |
| US8423257B2 (en) * | 2010-03-17 | 2013-04-16 | Honda Motor Co., Ltd. | System for and method of maintaining a driver intended path |
| WO2011128999A1 (ja) * | 2010-04-14 | 2011-10-20 | トヨタ自動車株式会社 | 車両の制御装置 |
| KR101519732B1 (ko) * | 2013-10-18 | 2015-05-12 | 현대자동차주식회사 | 정차 조향 상태에서의 제동 장치의 구동 방법과 이러한 구동 방법을 수행하는 구동 장치 |
| TWI593587B (zh) * | 2013-11-06 | 2017-08-01 | 財團法人工業技術研究院 | 轉向裝置 |
| DE102015121309A1 (de) * | 2015-12-08 | 2017-06-08 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Kraftfahrzeug mit einem Fahrerassistenzsystem sowie Verfahren zum Betrieb eines derartigen Fahrerassistenzsystems |
| FR3067321B1 (fr) * | 2017-06-12 | 2020-08-14 | Foundation Brakes France | Modification de la trajectoire d'une roue de vehicule en cas de defaillance de systeme de direction |
| JP2019131013A (ja) * | 2018-01-30 | 2019-08-08 | 株式会社ジェイテクト | 操舵制御装置 |
| CA3112607A1 (en) * | 2018-11-13 | 2020-05-22 | Rivian Ip Holdings, Llc | Systems and methods for providing a vehicle with a front dig mode |
| CN113928414B (zh) * | 2020-06-29 | 2023-02-07 | 比亚迪股份有限公司 | 控制车辆转向电机的方法、装置及车辆 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS51135326U (zh) * | 1975-04-21 | 1976-11-01 | ||
| JPS5840471U (ja) * | 1981-09-11 | 1983-03-17 | 有限会社河島農具製作所 | 運搬車 |
| JPS5963264A (ja) * | 1982-10-05 | 1984-04-10 | Aisin Seiki Co Ltd | 電動パワ−ステアリング装置 |
| JPS6357175U (zh) * | 1986-10-03 | 1988-04-16 | ||
| JPH037673A (ja) * | 1989-05-24 | 1991-01-14 | Mitsubishi Electric Corp | モータ駆動式前後輪操舵装置 |
| US5042238A (en) * | 1989-07-14 | 1991-08-27 | The Toro Company | Riding lawn mower |
| CN2078260U (zh) | 1990-11-10 | 1991-06-05 | 李世琦 | 新型汽车气压制动装置 |
| JPH06227283A (ja) * | 1993-02-09 | 1994-08-16 | Nissan Motor Co Ltd | 車両の自動走行制御装置 |
| US5323866A (en) | 1993-03-01 | 1994-06-28 | Hydro-Quebec | Power steering system |
| JP3100840B2 (ja) * | 1994-08-12 | 2000-10-23 | 三菱電機株式会社 | 電動パワーステアリング制御装置 |
| JPH08295257A (ja) | 1995-04-25 | 1996-11-12 | Nissan Motor Co Ltd | 電動パワーステアリング装置 |
| US5704623A (en) * | 1995-08-01 | 1998-01-06 | Chapman/Leonard Studio Equipment | Mobile camera crane base |
| JP3573382B2 (ja) * | 1995-11-02 | 2004-10-06 | 本田技研工業株式会社 | 車両におけるヨーモーメント制御方法 |
| JPH10244951A (ja) * | 1997-03-07 | 1998-09-14 | Meidensha Corp | フォークリフト |
| JPH1149020A (ja) * | 1997-07-31 | 1999-02-23 | Toyota Motor Corp | 操舵制御装置 |
| JPH1149019A (ja) * | 1997-07-31 | 1999-02-23 | Toyota Motor Corp | 操舵制御装置 |
| JP2000168604A (ja) | 1998-12-10 | 2000-06-20 | Unisia Jecs Corp | パワーステアリング装置 |
| GB2345895B (en) | 1999-01-22 | 2002-12-18 | Rover Group | A vehicle |
| US6523632B1 (en) * | 1999-07-15 | 2003-02-25 | Honda Giken Kogyo Kabushiki Kaisha | Vehicle equipped with turning mechanism |
| US6438930B1 (en) * | 1999-10-05 | 2002-08-27 | Wright Manufacturing, Inc. | Power lawn mower with stand-on and sit-down modes with battery located between feet of operator |
| DE10029819C1 (de) | 2000-06-16 | 2002-05-23 | Daimler Chrysler Ag | Fahrzeug |
| US6456925B1 (en) * | 2000-09-11 | 2002-09-24 | Deere & Company | Vehicle driven wheel speed control system |
| GB2367869B (en) * | 2000-10-14 | 2004-10-06 | Trw Ltd | Rear-axle demand for use with front push-through in electrohydraulic (EHB) braking systems |
| JP3905762B2 (ja) | 2002-01-18 | 2007-04-18 | 株式会社日立製作所 | パワーステアリング装置 |
| US6786296B2 (en) * | 2002-05-30 | 2004-09-07 | Bayerische Motoren Werke Aktiengesellschaft | Back-drivable steer-by-wire system with positive scrub radius |
| US6852061B2 (en) * | 2002-09-30 | 2005-02-08 | Benjamin Warren Schoon | Planetary gearbox with integral electric motor and steering means. |
| US7152704B2 (en) * | 2003-06-26 | 2006-12-26 | Kubota Corporation | Four-wheel drive work vehicle |
| JP4211518B2 (ja) | 2003-08-28 | 2009-01-21 | 日産自動車株式会社 | 電動パワーステアリング制御装置 |
| US7237629B1 (en) * | 2003-10-15 | 2007-07-03 | Gizmow Llc | Zero-turn radius vehicle with steerable front wheels |
| US7017327B2 (en) * | 2003-12-10 | 2006-03-28 | Deere & Company | Hybrid electric tool carrier |
| US7229139B2 (en) * | 2004-03-18 | 2007-06-12 | Ford Global Technologies, Llc | Control system for brake-steer assisted parking and method therefor |
| JP4432709B2 (ja) * | 2004-10-01 | 2010-03-17 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| JP4442509B2 (ja) * | 2005-04-28 | 2010-03-31 | 株式会社エクォス・リサーチ | 制御装置及びその制御装置を備える車両 |
-
2005
- 2005-11-16 JP JP2005331034A patent/JP4812409B2/ja not_active Expired - Fee Related
-
2006
- 2006-11-15 US US11/599,515 patent/US7703561B2/en not_active Expired - Fee Related
- 2006-11-16 DE DE102006054159A patent/DE102006054159A1/de not_active Withdrawn
- 2006-11-16 CN CNB2006101493779A patent/CN100534847C/zh not_active Expired - Fee Related
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102498026A (zh) * | 2009-08-03 | 2012-06-13 | 丰田自动车株式会社 | 车辆的行驶辅助装置 |
| CN102498026B (zh) * | 2009-08-03 | 2014-07-02 | 丰田自动车株式会社 | 车辆的行驶辅助装置 |
| CN102858610B (zh) * | 2010-04-28 | 2015-05-06 | 日产自动车株式会社 | 车辆的转向时性能改进装置 |
| CN102858610A (zh) * | 2010-04-28 | 2013-01-02 | 日产自动车株式会社 | 车辆的转向时性能改进装置 |
| US9139107B2 (en) | 2010-04-28 | 2015-09-22 | Nissan Motor Co., Ltd. | Device for improving vehicle behavior when steering |
| CN102963360A (zh) * | 2011-08-31 | 2013-03-13 | 本田技研工业株式会社 | 车辆的控制装置 |
| CN102963360B (zh) * | 2011-08-31 | 2015-10-28 | 本田技研工业株式会社 | 车辆的控制装置 |
| CN103253298A (zh) * | 2013-04-16 | 2013-08-21 | 中国电子科技集团公司第三十六研究所 | 电机驱动的液压助力转向泵 |
| CN104417549A (zh) * | 2013-08-20 | 2015-03-18 | 株式会社万都 | 控制主动后轮转向装置的方法 |
| CN104590369A (zh) * | 2014-12-30 | 2015-05-06 | 湖北工业大学 | 一种用于机耕船的联动式液压转向制动装置 |
| CN115107864A (zh) * | 2021-03-17 | 2022-09-27 | 丰田自动车株式会社 | 车辆用动力转向装置 |
| CN115107864B (zh) * | 2021-03-17 | 2024-03-12 | 丰田自动车株式会社 | 车辆用动力转向装置 |
| WO2023024631A1 (zh) * | 2021-08-26 | 2023-03-02 | 华为技术有限公司 | 车辆控制方法及装置、电子装置、计算机可读存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007137151A (ja) | 2007-06-07 |
| US7703561B2 (en) | 2010-04-27 |
| CN100534847C (zh) | 2009-09-02 |
| US20070176488A1 (en) | 2007-08-02 |
| JP4812409B2 (ja) | 2011-11-09 |
| DE102006054159A1 (de) | 2007-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1966333A (zh) | 动力转向装置 | |
| CN1530271A (zh) | 工业用电动车辆的转向装置 | |
| CN1268515C (zh) | 车辆转向控制装置及车辆转向控制方法 | |
| CN1310789C (zh) | 用于车辆沿弯道转弯行驶时的行驶稳定性控制装置 | |
| CN1065490C (zh) | 助力式转向装置 | |
| JP5498858B2 (ja) | ホイールローダ | |
| CN1126707C (zh) | 油压驱动式叉式升降车 | |
| CN105416392B (zh) | 一种推杆式复合转向系统及其模式切换控制方法 | |
| JP6118064B2 (ja) | 商用ハイブリッド電動操舵装置とその制御による性能および燃費改善方法 | |
| CN107600171B (zh) | 轮边/轮毂驱动多轴车辆的转向方法 | |
| CN1903633A (zh) | 动力转向系统及其控制方法 | |
| CN107651005A (zh) | 一种四轮行走机械的电液混合助力转向系统及其控制方法 | |
| CN103496396B (zh) | 一种节能电动轮汽车差速助力转向系统及其控制方法 | |
| CN101039835A (zh) | 驱动转向轮的车辆用电动转向装置的控制装置 | |
| CN107878170A (zh) | 机械与电控转向、集中与独立电驱动组合型车辆底盘结构 | |
| US9771078B2 (en) | Haulage vehicle | |
| CN102167077A (zh) | 一种汽车主动转向器 | |
| CN102632921B (zh) | 一种力与位移耦合控制的电动推杆式转向系统及控制方法 | |
| CN107813867A (zh) | 转向系统和车辆 | |
| CN107813865B (zh) | 转向系统和车辆 | |
| CN206719319U (zh) | 一种大客车液压主动转向系统 | |
| JP5950525B2 (ja) | 電動農作業車のモータ制御装置 | |
| CN102414038B (zh) | 外倾控制装置 | |
| CN107010107A (zh) | 一种大客车液压主动转向系统及控制方法 | |
| KR102681385B1 (ko) | 인휠모터 차량의 스티어링 부하 축소를 위한 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20090902 Termination date: 20151116 |
|
| EXPY | Termination of patent right or utility model |